串口通讯基础及S3C2410 UART控制器
默认分类2007-04-12 20:33:57 阅读974 评论4 字号:大中小
数据通信的基本方式可分为并行通信与串行通信两种:
并行通信:是指利用多条数据传输线将一个资料的各位同时传送。它的特点是传输速度快,适用于短距离通信,但要求通讯速率较高的应用场合。
串行通信:是指利用一条传输线将资料一位位地顺序传送。特点是通信线路简单,利用简单的线缆就可实现通信,降低成本,适用于远距离通信,但传输速度慢的应用场合。
一、异步通信及其协议
异步通信以一个字符为传输单位,通信中两个字符间的时间间隔是不固定的,然而在同一个字符中的两个相邻位代码间的时间间隔是固定的。
通信协议(通信规程):是指通信双方约定的一些规则。在使用异步串口传送一个字符的信息时,对资料格式有如下约定:规定有空闲位、起始位、资料位、奇偶校验位、停止位。
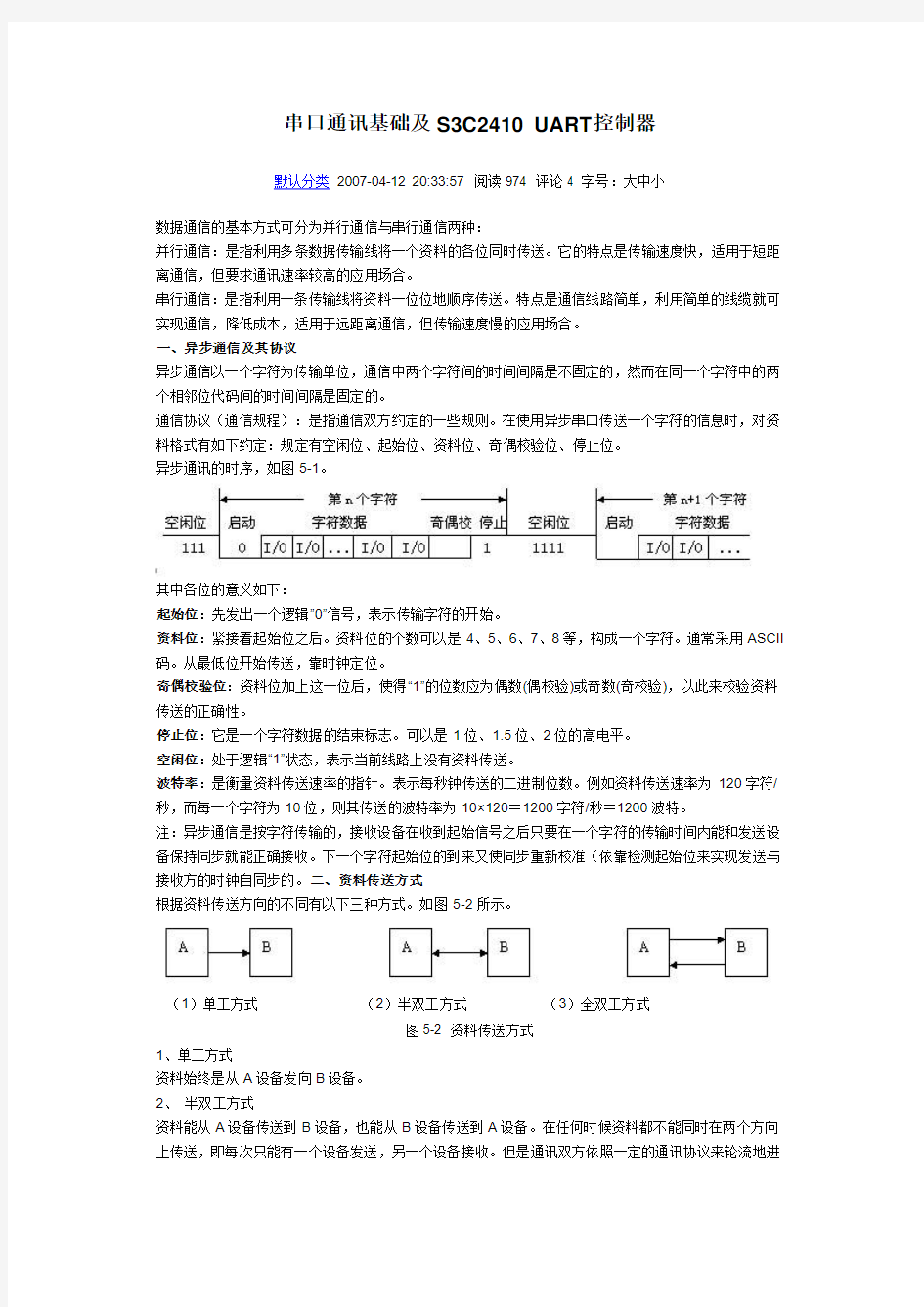
异步通讯的时序,如图5-1。
其中各位的意义如下:
起始位:先发出一个逻辑”0”信号,表示传输字符的开始。
资料位:紧接着起始位之后。资料位的个数可以是4、5、6、7、8等,构成一个字符。通常采用ASCII 码。从最低位开始传送,靠时钟定位。
奇偶校验位:资料位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验资料传送的正确性。
停止位:它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。
空闲位:处于逻辑“1”状态,表示当前线路上没有资料传送。
波特率:是衡量资料传送速率的指针。表示每秒钟传送的二进制位数。例如资料传送速率为120字符/秒,而每一个字符为10位,则其传送的波特率为10×120=1200字符/秒=1200波特。
注:异步通信是按字符传输的,接收设备在收到起始信号之后只要在一个字符的传输时间内能和发送设备保持同步就能正确接收。下一个字符起始位的到来又使同步重新校准(依靠检测起始位来实现发送与接收方的时钟自同步的。二、资料传送方式
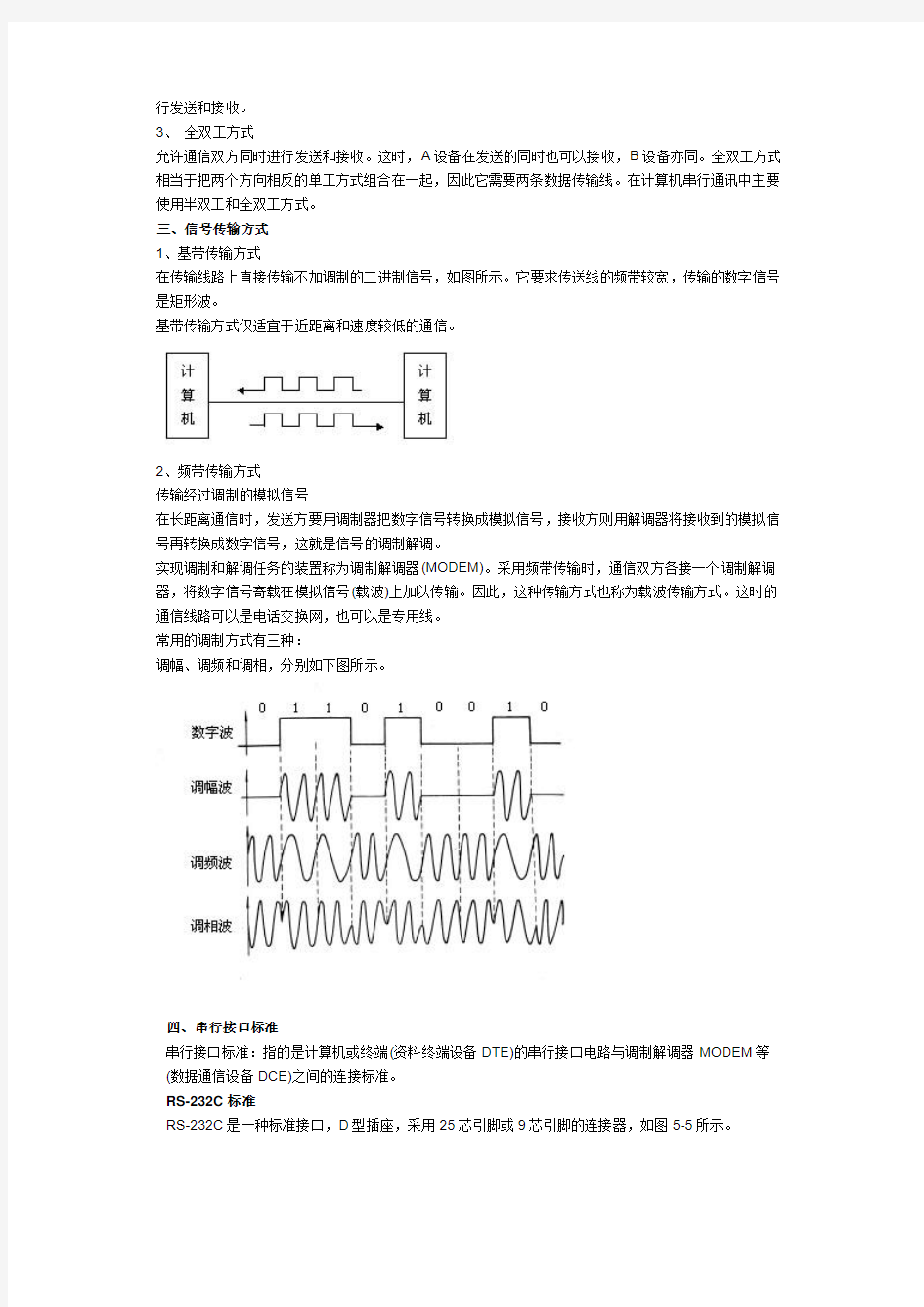
根据资料传送方向的不同有以下三种方式。如图5-2所示。
(1)单工方式(2)半双工方式(3)全双工方式
图5-2 资料传送方式
1、单工方式
资料始终是从A设备发向B设备。
2、半双工方式
资料能从A设备传送到B设备,也能从B设备传送到A设备。在任何时候资料都不能同时在两个方向上传送,即每次只能有一个设备发送,另一个设备接收。但是通讯双方依照一定的通讯协议来轮流地进
行发送和接收。
3、全双工方式
允许通信双方同时进行发送和接收。这时,A设备在发送的同时也可以接收,B设备亦同。全双工方式相当于把两个方向相反的单工方式组合在一起,因此它需要两条数据传输线。在计算机串行通讯中主要使用半双工和全双工方式。
三、信号传输方式
1、基带传输方式
在传输线路上直接传输不加调制的二进制信号,如图所示。它要求传送线的频带较宽,传输的数字信号是矩形波。
基带传输方式仅适宜于近距离和速度较低的通信。
2、频带传输方式
传输经过调制的模拟信号
在长距离通信时,发送方要用调制器把数字信号转换成模拟信号,接收方则用解调器将接收到的模拟信号再转换成数字信号,这就是信号的调制解调。
实现调制和解调任务的装置称为调制解调器(MODEM)。采用频带传输时,通信双方各接一个调制解调器,将数字信号寄载在模拟信号(载波)上加以传输。因此,这种传输方式也称为载波传输方式。这时的通信线路可以是电话交换网,也可以是专用线。
常用的调制方式有三种:
调幅、调频和调相,分别如下图所示。
四、串行接口标准
串行接口标准:指的是计算机或终端(资料终端设备DTE)的串行接口电路与调制解调器MODEM等(数据通信设备DCE)之间的连接标准。
RS-232C标准
RS-232C是一种标准接口,D型插座,采用25芯引脚或9芯引脚的连接器,如图5-5所示。
图5-5
微型计算机之间的串行通信就是按照RS-232C标准设计的接口电路实现的。如果使用一根电话线进行通信,那幺计算机和MODEM之间的联机就是根据RS-232C标准连接的。其连接及通信原理如图5-6所示
图5-6
RS232信号定义
RS-232C标准规定接口有25根联机。只有以下9个信号经常使用.
引脚和功能分别如下:
1. TXD(第2脚):发送资料线,输出。发送资料到MODEM。
2. RXD(第3脚):接收资料线,输入。接收资料到计算机或终端。
3.(第4脚):请求发送,输出。计算机通过此引脚通知MODEM,要求发送资料。
4. (第5脚):允许发送,输入。发出作为对的回答,计算机才可以进行发送资料。
5.(第6脚):资料装置就绪(即MODEM准备好),输入。表示调制解调器可以使用,该信号有时直接接到电源上,这样当设备连通时即有效。
6.CD(第8脚):载波检测(接收线信号测定器),输入。表示MODEM已与电话线路连接好。
7. 如果通信线路是交换电话的一部分,则至少还需如下两个信号:
8.RI(第22脚):振铃指示,输入。MODEM若接到交换台送来的振铃呼叫信号,就发出该信号来通知计算机或终端。
9. (第20脚):资料终端就绪,输出。计算机收到RI信号以后,就发出信号到MODEM作为回答,以控制它的转换设备,建立通信链路。
10. GND(第7脚):信号地
逻辑电平
RS-232C标准采用EIA电平,规定:
“1”的逻辑电平在-3V~-15v之间
“0”的逻辑电平在+3V~+15V之间。
由于EIA电平与TTL电平完全不同,必须进行相应的电平转换,MCl488完成TTL电平到EIA电平的转换,MCl489完成EIA电平到ITL电平的转换。还有MAX232可以同时完成TTL->EIA和EIA->TTL 的电平转换。
除了RS-232C标准以外,还有一些其它的通用的异步串行接口标准,如:
RS-423A标准
为了克服RS-232C的缺点,提高传送速率,增加通信距离,又考虑到与RS-232C的兼容性,美国电子工业协会在1987年提出了RS-423A标准。该标准的主要优点是在接收端采用了差分输入。而差分输入对共模干扰信号有较高的抑制作用,这样就提高了通信的可靠性。RS-423A用-6v表示逻辑“1”,用+6v表示逻辑“0”,可以直接与RS-232C相接。采用RS-423A标准以获得比RS-232C更佳的通信效果。图5-7是RS423A的连接示意图。
图5-7
RS-422A标准
RS-422A总线采用平衡输出的发送器,差分输入的接收器。如图5-8所示。
图5-8
RS-422A的输出信号线间的电压为±2v,接收器的识别电压为±0.2v。共模范围±25v。在高速传送信号时,应该考虑到通信线路的阻抗匹配,一般在接收端加终端电阻以吸收掉反射波。电阻网络也应该是平衡的,如图5-9所示。
图5-9 为RS-422A平衡输出差分输示意图
RS-485标准
RS-485适用于收发双方共享一对线进行通信,也适用于多个点之间共享一对线路进行总线方式联网,但通信只能是半双工的,线路如图5-10所示。
图5-10
典型的RS232到RS422/485转换芯片有:MAX481/483/485/487/488/489/490/491,
SN75175/176/184等等,它们均只需单一+5v电源供电即可工作(芯片内部采用电荷泵方式升压)。具体使用方法可查阅有关技术手册。
五、S3C2410内置的UART控制器
S3C2410内部具有3个独立的UART控制器,每个控制器都可以工作在Interrupt(中断)模式或DMA(直接内存访问)模式,也就是说UART控制器可以CPU与UART控制器传送资料的时候产生中断或DMA请求。并且每个UART均具有16字节的FIFO(先入先出寄存器),支持的最高波特率可达到230.4Kbps
图5-11是S3C2410内部UART控制器的结构图
图5-11
UART的操作
UART的操作分为以下几个部分,分别是:资料发送、资料接收、产生中断、产生波特率、Loopback
模式、红外模式以及自动流控模式。
资料发送
发送的资料帧格式是可以编程设置的。它包含了起始位、5~8个资料位、可选的奇偶校验位以及
1~2位停止位。这些都是通过UART的控制寄存器ULCONn 来设置的。
资料接收
同发送一样,接收的资料帧格式也是可以进行编程设置的。此外,还具备了检测溢出出错、奇偶
校验出错、帧出错等出错检测,并且每种错误都可以置相应的错误标志。
自动流控模式
S3C2410的UART0和UART1都可以通过各自的nRTS和nCTS信号来实现自动流控。
在自动流控(AFC)模式下nRTS取决于接收端的状态,而nCTS控制了发送断的操作。具体地说:只有当nCTS有效时(表明接收方的FIFO已经准备就绪来接收资料了),UART才会将FIFO中的资料发送出去。在UART接收资料之前,只要当接收FIFO有至少2-byte空余的时候,nRTS就会被置为有效。图5-12是UART自动流控模式的连接方式
图5-12
中断/DMA请求产生
S3C2410的每个UART都有7种状态,分别是:溢出覆盖(Overrun)错误、奇偶校验错误、帧出错、断线错误、接收就绪、发送缓冲空闲、发送移位器空闲。它们在UART状态寄存器UTRSTATn / UERSTATn 中有相应的标志位。
波特率发生器
每个UART控制器都有各自的波特率发生器来产生发送和接收资料所用的序列时钟,波特率发生器的时钟源可以CPU内部的系统时钟,也可以从CPU的UCLK 管脚由外部取得时钟信号,并且可以通过UCONn 选择各自的时钟源。
波特率产生的具体计算方法如下:
当选择CPU内部时钟时:
UBRDIVn=(int)(PCLK/(bps*16))-1,bps为所需要的波特率值,PCLK为CPU内部外设总线(APB)的工作时钟。
当需要得到更精确的波特率时,可以选择由UCLK引入的外部时钟来生成。
UBRDIVn=(int)(UCLK/(bps*16))-1
LoopBack操作模式
S3C2410 CPU的UART提供了一种测试模式,也就是这里所说的LoopBack模式。在设计系统的具体应用时,为了判断通讯故障是由于外部的数据链路上的问题,还是CPU内驱动程序或CPU本身的问题,这就需要采用LoopBack模式来进行测试。在LoopBack模式中,资料发送端TXD在UART内部就从逻辑
上与接收端RXD连在一起,并可以来验证资料的收发是否正常。
UART控制寄存器
下面将针对UART的各个控制寄存器逐一进行讲解,以期对UART的操作和设置能有更进一步的了解。ULCONn (UART Line ControlRegister)见图5-13
图5-13
Word Length :资料位长度
Number of Stop Bit :停止位数
Parity Mode :奇偶校验位类型
Infra-Red Mode :UART/红外模式选择(当以UART模式工作时,需设为“0”)
UCONn (UART ControlRegister)见图5-14
Receive Mode:选择接收模式。如果是采用DMA模式的话,还需要指定说使用的DMA信道。Transmit Mode :同上。
Send Break Signal :选择是否在传1帧资料中途发送Break信号。
Loopback Mode :选择是否将UART置于Loopback测试模式。
Rx Error Status Interrupt Enable:选择是否使能当发生接收异常时,是否产生接收错误中断。
Rx Time Out Enable :是否使能接收超时中断。
Rx Interrupt Type :选择接收中断类型。
选择0:Pulse(脉冲式/边沿式中断。非FIFO模式时,一旦接收缓冲区中有资料,即产生一个中断;为FIFO模式时,一旦当FIFO中的资料达到一定的触发水平后,即产生一个中断)
选择1:Level(电平模式中断。非FIFO模式时,只要接收缓冲区中有资料,即产生中断;为FIFO模式时,只要FIFO中的资料达到触发水平后,即产生中断)
Tx Interrupt Type :类同于Rx Interrupt Type
Clock Selection :选择UART波特率发生器的时钟源。
图5-14
UFCONn (UART FIFOConrtol Register)见图5-15
FIFO Enable :FIFO使能选择。
Rx FIFO Reset:选择当复位接收FIFO时是否自动清除FIFO中的内容。
Tx FIFO Reset:选择当复位发送FIFO时是否自动清除FIFO中的内容。
Rx FIFO Trigger Level :选择接收FIFO的触发水平。
Tx FIFO Trigger Level :选择发送FIFO的触发水平。
图5-15
UMCONn (UART ModemControl Register)见图5-16
Request to Send :如果在AFC模式下,该位将由UART控制器自动设置;否则的话就必须由用户的软件来控制。
Auto Flow Control :选择是否使能自动流控(AFC)。
图5-16
UTRSTATn (UART TX/RXStatus Register)见图5-17
Receive buffer data ready :当接收缓冲寄存器从UART接收端口接收到有效资料时将自动置“1”。反之为“0”则表示缓冲器中没有资料。
Transmit buffer empty:当发送缓冲寄存器中为空,自动置“1”;反之表明缓冲器中正有资料等待发送。Transmitter empty:当发送缓冲器中已经没有有效资料时,自动置“1”;反之表明尚有资料未发送。
图5-17 UERSTATn (UART ErrorStatus Register)见图5-18 Overrun Error :为“1”,表明发生Overrun错误。
Frame Error :为“1”。表明发生Frame(帧)错误。
图5-18 UFSTATn:(UART FIFOStatus Register)见图5-19 Rx FIFO Count :接收FIFO中当前存放的字节数。
Tx FIFO Count :发送FIFO中当前存放的字节数。
Rx FIFO Full :为“1“表明接收FIFO已满。
Tx FIFO Full :为“1“表明发送FIFO已满。
图5-19
UMSTATn:(UART FIFOStatus Register)见图5-20
Clear to Send :为“0”表示CTS无效;为“1”表示CTS有效。
Delta CTS:指示自从上次CPU访问该位后,nCTS的状态有无发生改变。
为“0”则说明不曾改变;反之表明nCTS信号已经变化了。
图5-20
UTXHn 和URXHn 分别是UART发送和接收资料寄存器
这两个寄存器存放着发送和接收的资料,当然只有一个字节8位资料。需要注意的是在发生溢出错误的时候,接收的资料必须要被读出来,否则会引发下次溢出错误
UBRDIVn :(UART Baud Rate DivisorRegister)见图5-21
图5-21
关于UART波特率的计算方法,在前面的内容中已经有详细的阐述,此处不做多余说明。
小结:读写状态寄存器UTRSTAT以及错误状态寄存UERSTAT,可以反映芯片目前的读写状态以及错误类型。FIFO状态寄存器UFSTAT 和MODEM 状态寄存器UMSTAT,通过前者可以读出目前FIFO是否满以及其中的字节数;通过后者可以读出目前MODEM 的CTS状态。
RS232串口通信详解(引脚定义,电气特性,传输格式,接收过程,单片机晶振,RS485,RS422) 通信原理知识2010-01-03 20:53 阅读1 评论0 字号:大中小RS232串口通信详解(引脚定义,电气特性,传输格式,接收过程,单片机晶振,RS485,RS422) 串口是计算机上一种非常通用的设备通信协议。 --------------------------------- 串口的引脚定义: 信号方向来 9芯 缩写描述 自 1调制解调器CD载波检测 2调制解调器RXD接收数据 3PC TXD发送数据 4PC DTR数据终端准备好 5GND信号地 6调制解调器DSR通讯设备准备好 7PC RTS请求发送 8调制解调器CTS允许发送 9调制解调器RI响铃指示器
两个串口连接时,接收数据针脚与发送数据针脚相连,彼此交叉,信号地对应相接即可。 --------------------------------- 串口的电气特性: 1)RS-232串口通信最远距离是50英尺 2)RS232可做到双向传输,全双工通讯,最高传输速率20kbps 3)RS-232C上传送的数字量采用负逻辑,且与地对称 逻辑1:-3 ~-15V 逻辑0:+3~+15V 所以与单片机连接时常常需要加入电平转换芯片: --------------------------------- 串口通信参数: a)波特率:RS-232-C标准规定的数据传输速率为每秒50、75、 100、150、300、600、1200、2400、4800、9600、19200波特。 b)数据位:标准的值是5、7和8位,如何设置取决于你想传送的信息。比如,标准的ASCII码是0~127(7位);扩展的ASCII码是0~255(8位)。 c)停止位:用于表示单个包的最后一位,典型的值为1,1.5和2位。由于数是在传输线上定时的,并且每一
我们来看具体的实现步骤。 公司要求实现以下几个功能: 1):实现两台计算机之前的串口通信,以16进制形式和字符串两种形式传送和接收。 2):根据需要设置串口通信的必要参数。 3):定时发送数据。 4):保存串口设置。 看着好像挺复杂,其实都是纸老虎,一戳就破,前提是你敢去戳。我尽量讲的详细一些,争取说到每个知识点。 在编写程序前,需要将你要测试的COM口短接,就是收发信息都在本地计算机,短接的方式是将COM口的2、3号针接起来。COM 口各针的具体作用,度娘是这么说的:COM口。记住2、3针连接一定要连接牢固,我就是因为接触不良,导致本身就不通,白白花掉了一大半天时间调试代码。 下面给出主要的操作界面,如下:
顺便,我将所有控件对应的代码名字也附上了,相信对初学者来说,再看下面的代码会轻松很多。控件名字命名的方法是“控件名+作用”的形式,例如“打开串口”的开关按钮,其名字是btnSwitch (btn就是button的简写了)。我认为这种命名控件的方式比较好,建议大家使用,如果你有好的命名方式,希望你能告诉我! 下面我们将各个功能按照从主到次的顺序逐个实现。(我分块给出代码实现,详细代码见链接:《C#串口通信工具》)
一、获取计算机的COM口总个数,将它们列为控件cbSerial的候选项,并将第一个设为cbSerial的默认选项。 这部分是在窗体加载时完成的。请看代码: (很多信息代码的注释里讲的很清楚,我就不赘述了。) [csharp]view plaincopyprint? 1.//检查是否含有串口 2. string[] str = SerialPort.GetPortNames(); 3. if (str == null) 4. { 5. MessageBox.Show("本机没有串口!", "Error"); 6. return; 7. } 8. 9. //添加串口项目 10. foreach (string s in System.IO.Ports.SerialPort.GetPortNames()) 11. {//获取有多少个COM口 12. cbSerial.Items.Add(s); 13. } 14. 15. //串口设置默认选择项
一、RS485串口通信电路图 二、VxWorks中基于RS485总线得串口通信协议及实现 摘要:本文介绍了在嵌入式实时操作系统Vxworks下串行设备得驱动架构及实现,提出了一种基于RS-485总线得新型串口通信协议,重点讨论了基于这种协议得应用程序得设计方法,发送时主要采用了总线仲裁机制,接收时主要采用了字符合法性校验、长度校验、内容得CRC校验,提高了系统得通信效率与稳定性。 关键词:VxWorks;RS-485;通信协议;总线仲裁;CRC校验 1 引言 随着信息技术与互联网得飞速发展,以及计算机、通讯、数码产品等领域得高速增长,数字化时代已经来临。嵌入式设备就是数字化时代得主流产品,嵌入式软件就是数字化产品得核心,作为嵌入式软件得基础与关键,嵌入式操作系统在产业发展过程中扮演着越来越重要得角色,应用遍及工业自动化、网络通信、航空航天、医疗仪器等领域。 2 RS-485总线 RS-485总线接口就是一种常用得串口,具有网络连接方便、抗干扰性能好、传输距离远等优点。RS-485收发器采用平衡发送与差分接收,因此具有抑制共模干扰得能力,加上收发器具有高得灵敏度,能检测到低达200mv得电压,可靠通信得传输距离可达数千米。使用RS-485总线组网,只需一对双绞线就可实现多系统联网构成分布式系统、设备简单、价格低廉、通信距离长。 3 VxWorks中串口驱动得实现
VxWorks 操作系统就是美国Wind River公司设计开发得嵌入式实时操作系统(RTOS),就是嵌入式开发环境得关键组成部分。Vxworks 操作系统得I/O 系统可以提供简单、统一、与任何设备无关得接口。这些设备包括:面向字符设备、随机块存储设备、虚拟设备、控制与监视设备以及网络设备。Vxworks 得I/O 系统包括基本I/O 系统与缓冲I/O 系统,具有比其她I/O 系统更快速,兼容性更好得特性。这对于实时系统就是很重要得。 3、1 串口驱动架构 基于vxWorks得串口设备驱动程序架构,对vxWorks得 虚拟设备ttyDrv进行封装,向上将TTY设备安装到标准 得I/O系统中,上层应用通过标准得I/O 接口完成对硬 件设备得操作,向下提供对实际硬件设备得底层设备驱 动程序。其软件架构如图1所示。 由图1可知,串口设备驱动由两部分组成,一部分为对 ttyDrv进行封装,将串行设备安装到标准得I/O系统中, 提供对外得接口;另一部分为串行设备驱动程序,提供 对硬件设备得基本操作。 虚拟设备ttyDrv管理着I/O系统与真实驱动程序之间 得通信。在I/O系统方面,虚拟设备ttyDrv作为一个字 符型设备存在,它将自身得入口点函数挂在I/O系统上, 创建设备描述符并将其加入到设备列表中。当用户有I/O请求包到达I/O系统中时,I/O系统会调用ttyDrv相应得函数响应请求。同时,ttyDrv管理了缓冲区得互斥与任务得同步操作。另一方面,ttyDrv负责与实际得设备驱动程序交换信息。通过设备驱动程序提供得回调函数及必要得数据结构,ttyDrv将系统得I/O 请求作相应得处理后,传递给设备驱动程序,由设备驱动程序完成实际得I/O操作。 3、2 驱动初始化 串口设备得初始化xxDevInit流程如图2。 设备驱动得初始化过程首先调用系统函数ttyDrv(),该 函数通过调用iosDrvInstall()将ttyOpen()、 ttyIoctl()、tyRead()、tyRead、tyWrite安装到系统 驱动函数表中,供I/O系统调用。 接着根据用户入参对串口芯片寄存器进行初始化,安装 驱动函数指针。 最后调用系统函数ttyDevCreate()创建ttyDrv设备。 该函数初始化设备描述符,调用tyDevInit()函数初始
单片机原理与应用课程设计任务书
单片机原理与应用学年设计说明书 学院名称:计算机与信息工程学院 班级名称: 学生姓名: 学号:2012211369 题目:双机间的串口双向通信 指导教师 姓名: 起止日期:2014.12.29至2015.1.4
一、绪论 随着电子技术的飞速发展,单片机也步如一个新的时代,越来越多的功能各异的单片机为我们的设计提供了许多新的方法与思路。 对于一些场合,比如:复杂的后台运算及通信与高实时性前台控制系统、软件资源消耗大的系统、功能强大的低消耗系统、加密系统等等。如果合理使用多种不同类型的单片机组合设计,可以得到极高灵活性与性能价格比,因此,多种异型单片机系统设计渐渐成为一种新的思路,单片机技术作为计算机技术的一个重要分支,由于单片机体积小,系统运行可靠,数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。 但在一些相对复杂的单片机应用系统中,仅仅一个单片机资源是不够的,往往需要两个或多个单片机系统协同工作。这就对单片机通信提出了更高要求。 单片机之间的通信可以分为两大类:并行通信和串行通信。串行通信传输线少,长距离传输时成本低,且可以利用数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。所以本系统采用串行通信来实现单片机之间可靠的,有效的数据交换。 二、相关知识 2.1 双机通信介绍 两台机器的通信方式可分为单工通信、半双工通信、双工通信,他们的通信原理及通信方式为: 单工通信:是指消息只能单方向传输的工作方式。单工通信信道是单向信道,发送端和接收端的身份是固定的,发送端只能发送信息,不能接收信息;接收端只能接收信息,不能发送信息,数据信号仅从一端传送到另一端,即信息流是单方向的。通信双方采用单工通信属于点到点的通信。根据收发频率的异同,单工通信可分为同频通信和异频通信。 半双工通信:这种通信方式可以实现双向的通信,但不能在两个方向上同时进行,必须轮流交替地进行。也就是说,通信信道的每一段都可以是发送端,也可以是接端。但同一时刻里,信息只能有一个传输方向。如
串口通讯—RS-232-C详解 蓝鸟发表于 2005-9-22 16:19:34 串行通信接口标准经过使用和发展,目前已经有几种。但都是在RS-232标准的基础上经过改进而形成的。所以,以RS-232C为主来讨论。RS-323C标准是美国EIA(电子工业联合会)与BELL等公司一起开发的1969年公布的通信协议。它适合于数据传输速率在0~20000b/s范围内的通信。这个标准对串行通信接口的有关问题,如信号线功能、电器特性都作了明确规定。由于通行设备厂商都生产与RS-232C制式兼容的通信设备,因此,它作为一种标准,目前已在微机通信接口中广泛采用。 在讨论RS-232C接口标准的内容之前,先说明两点: 首先,RS-232-C标准最初是远程通信连接数据终端设备DTE(Data Terminal Equipment)与数据通信设备DCE(Data Communication Equipment)而制定的。因此这个标准的制定,并未考虑计算机系统的应用要求。但目前它又广泛地被借来用于计算机(更准确的说,是计算机接口)与终端或外设之间的近端连接标准。显然,这个标准的有些规定及和计算机系统是不一致的,甚至是相矛盾的。有了对这种背景的了解,我们对RS-232C标准与计算机不兼容的地方就不难理解了。 其次,RS-232C标准中所提到的“发送”和“接收”,都是站在DTE立场上,而不是站在DCE的立场来定义的。由于在计算机系统中,往往是CPU和I/O设备之间传送信息,两者都是DTE,因此双方都能发送和接收。 一、RS-232-C RS-232C标准(协议)的全称是EIA-RS-232C标准,其中EIA(Electronic Industry Association)代表美国电子工业协会,RS(ecommeded standard)代表推荐标准,232是标识号,C代表RS232的最新一次修改(1969),在这之前,有RS232B、RS232A。。它规定连接电缆和机械、电气特性、信号功能及传送过程。常用物理标准还有有EIA�RS-232-C、EIA�RS-422-A、 EIA�RS-423A、EIA�RS-485。这里只介绍EIA�RS-232-C(简称232,RS232)。例如,目前在IBM PC机上的COM1、COM2接口,就是RS-232C接口。 1.电气特性 EIA-RS-232C对电器特性、逻辑电平和各种信号线功能都作了规定。 在TxD和RxD上:逻辑1(MARK)=-3V~-15V 逻辑0(SPACE)=+3~+15V 在RTS、CTS、DSR、DTR和DCD等控制线上: 信号有效(接通,ON状态,正电压)=+3V~+15V 信号无效(断开,OFF状态,负电压)=-3V~-15V
串口就是计算机上一种非常通用的设备通信协议。 --------------------------------- 串口的引脚定义: 9芯信号方向来自缩写描述 1调制解调器CD载波检测 2调制解调器RXD接收数据 3PC TXD发送数据 4PC DTR数据终端准备好 5GND信号地 6调制解调器DSR通讯设备准备好 7PC RTS请求发送 8调制解调器CTS允许发送 9调制解调器RI响铃指示器 两个串口连接时,接收数据针脚与发送数据针脚相连,彼此交叉,信号地对应相接即可。--------------------------------- 串口的电气特性: 1)RS-232串口通信最远距离就是50英尺 2)RS232可做到双向传输,全双工通讯,最高传输速率20kbps 3)RS-232C上传送的数字量采用负逻辑,且与地对称 逻辑1:-3 ~-15V 逻辑0:+3~+15V 所以与单片机连接时常常需要加入电平转换芯片:
--------------------------------- 串口通信参数: a)波特率:RS-232-C标准规定的数据传输速率为每秒50、75、100、150、300、600、1200、2400、 4800、9600、19200波特。b)数据位:标准的值就是5、7与8位,如何设置取决于您想传送的信息。比如,标准的ASCII码就是0~127(7位);扩展的ASCII码就是0~255(8位)。 c)停止位:用于表示单个包的最后一位,典型的值为1,1、5与2位。由于数就是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅就是表示传输的结束,并且提供计算机校正时钟同步的机会。d)奇偶校验位:在串口通信中一种简单的检错方式。对于偶与奇校验的情况,串口会设置校验位(数据位后面的一位),用一个值确保传输的数据有偶个或者奇个逻辑高位。例如,如果数据就是011,那么对于偶校验,校验位为 0,保证逻辑高的位数就是偶数个。如果就是奇校验,校验位位1,这样就有3个逻辑高位。 --------------------------------- 串口通信的传输格式: 串行通信中,线路空闲时,线路的TTL电平总就是高,经反向 RS232的电平总就是低。一个数据的开始RS232线路为高电平,结束时Rs232为低电平。数据总就是从低位向高位一位一位的传输。示波器读数时,左边就是数据的高位。 例如,对于16进制数据55aaH,当采用8位数据位、1位停止位传输时,它在信号线上的波形如图1(TTL电平)与图 2(RS-232电平)所示。 55H=01010101B,取反后10101010B,加入一个起始位1,一个停止位0,55H的数据格式为1010101010B; aaH=10101010B,取反后01010101B,加入一个起始位1,一个停止位0,55H的数据格式为1101010100B;
51单片机串口通信的原理与应用流程解析 一、原理简介 51 单片机内部有一个全双工串行接口。什么叫全双工串口呢?一般来说,只能接受或只能发送的称为单工串行;既可接收又可发送,但不能同时进行的称为半双工;能同时接收和发送的串行口称为全双工串行口。串行通信是指数据一位一位地按顺序传送的通信方式,其突出优点是只需一根传输线,可大大降低硬件成本,适合远距离通信。其缺点是传输速度较低。 与之前一样,首先我们来了解单片机串口相关的寄存器。 SBUF 寄存器:它是两个在物理上独立的接收、发送缓冲器,可同时发送、接收数据,可通过指令对SBUF 的读写来区别是对接收缓冲器的操作还是对发送缓冲器的操作。从而控制外部两条独立的收发信号线RXD(P3.0)、TXD(P3.1),同时发送、接收数据,实现全双工。 串行口控制寄存器SCON(见表1)。 表1 SCON寄存器 表中各位(从左至右为从高位到低位)含义如下。 SM0 和SM1 :串行口工作方式控制位,其定义如表2 所示。 表2 串行口工作方式控制位 其中,fOSC 为单片机的时钟频率;波特率指串行口每秒钟发送(或接收)的位数。 SM2 :多机通信控制位。该仅用于方式2 和方式3 的多机通信。其中发送机SM2 = 1(需要程序控制设置)。接收机的串行口工作于方式2 或3,SM2=1 时,只有当接收到第9 位数据(RB8)为1 时,才把接收到的前8 位数据送入SBUF,且置位RI 发出中断申请引发串行接收中断,否则会将接受到的数据放弃。当SM2=0 时,就不管第位数据是0 还是1,都将数据送入SBUF,并置位RI 发出中断申请。工作于方式0 时,SM2 必须为0。
WIN32 API串口通讯实例教程 第一节实现串口通讯的函数及串口编程简介 API函数不仅提供了打开和读写通讯端口的操作方法,还提供了名目繁多的函数以支持对串行通讯的各种操作。常用函数及作用下: 函数名作用 CreateFile 打开串口 GetCommState 检测串口设置 SetCommState 设置串口 BuilderCommDCB 用字符串中的值来填充设备控制块 GetCommTimeouts 检测通信超时设置 SetCommTimeouts 设置通信超时参数 SetCommMask 设定被监控事件 WaitCommEvent 等待被监控事件发生 WaitForMultipleObjects 等待多个被监测对象的结果 WriteFile 发送数据 ReadFile 接收数据 GetOverlappedResult 返回最后重叠(异步)操作结果 PurgeComm 清空串口缓冲区,退出所有相关操作 ClearCommError 更新串口状态结构体,并清除所有串口硬件错误 CloseHandle 关闭串行口 用Windows API 编写串口程序本身是有巨大优点的,因为控制能力会更强,效率也会更高。 API编写串口,过程一般是这样的: 1、创建串口句柄,用CreateFile; 2、对串口的参数进行设置,其中比较重要的是波特率(BaudRate),数据宽度(BytesBits),奇偶校验(Parity),停止位(StopBits),当然,重要的还有端口号(Port); 3、然后对串口进行相应的读写操作,这时候用到ReadFile和WriteFile函数; 4、读写结束后,要关闭串口句柄,用CloseFile。 下面依次讲述各个步骤的过程。
串行通讯原理说明--RS232,UART电平等介绍 串行通讯:一条信息的各位数据被逐位按顺序传送的通讯方式称为串行通讯。 串行通讯的特点是:数据位传送,传按位顺序进行,最少只需一根传输线即可完成,成本低但送速度慢。串行通讯的距离可以从几米到几千米。 根据信息的传送方向,串行通讯可以进一步分为单工、半双工和全双工三种。 能够完成上述“串<- ->并”转换功能的电路,通常称为“通用异步收发器” (UART:Universal Asynchronous Receiver and Transmitter), 典型的芯片有:Intel 8250/8251,16550。 EIA-RS-232C对电器特性、逻辑电平和各种信号线功能都作了规定。 在TxD和RxD上:逻辑1(MARK) =-3V~-15V 逻辑0(SPACE)=+3~+15V 在RTS、CTS、DSR、DTR和DCD等控制线上: 信号有效(接通,ON状态,正电压)=+3V~+15V 信号无效(断开,OFF状态,负电压) = -3V~-15V 数据传输时,低位在前,高位在后 数据位:1位、2位 停止位:1位、1.5位、2位 .流控制在串行通讯中的作用 解决丢失数据的问题 .硬件流控制 硬件流控制常用的有RTS/CTS(请求发送/清除发送)流控制和DTR/DSR(数据终端就绪/ 数据设置就绪)流控制 .软件流控制 一般通过XON/XOFF来实现软件流控制。 奇校验:所有传送的数位(含字符的各数位和校验位)中,“1”的个数为奇数,如: 1 0110,0101 0 0110,0001 偶校验:所有传送的数位(含字符的各数位和校验位)中,“1”的个数为偶数,如: 1 0100,0101
一、串口通信原理 串口通讯对单片机而言意义重大,不但可以实现将单片机的数据传输到计算机端,而且也能实现计算机对单片机的控制。由于其所需电缆线少,接线简单,所以在较远距离传输中,得到了广泛的运用。串口通信的工作原理请同学们参看教科书。 以下对串口通信中一些需要同学们注意的地方作一点说明: 1、波特率选择 波特率(Boud Rate)就是在串口通信中每秒能够发送的位数(bits/second)。MSC- 51串行端口在四种工作模式下有不同的波特率计算方法。其中,模式0和模式2波特率计算很简单,请同学们参看教科书;模式1和模式3的波特率选择相同,故在此仅以工作模式1为例来说明串口通信波特率的选择。 在串行端口工作于模式1,其波特率将由计时/计数器1来产生,通常设置定时器工作于模式2(自动再加模式)。在此模式下波特率计算公式为: 波特率=(1+SMOD)*晶振频率/(384*(256-TH1)) 其中,SMOD——寄存器PCON的第7位,称为波特率倍增位; TH1——定时器的重载值。 在选择波特率的时候需要考虑两点:首先,系统需要的通信速率。这要根据系统的运作特点,确定通信的频率范围。然后考虑通信时钟误差。使用同一晶振频率在选择不同的通信速率时通信时钟误差会有很大差别。为了通信的稳定,我们应该尽量选择时钟误差最小的频率进行通信。 下面举例说明波特率选择过程:假设系统要求的通信频率在20000bit/s以下,晶振频率为12MHz,设置SMOD=1(即波特率倍增)。则 TH1=256-62500/波特率 根据波特率取值表,我们知道可以选取的波特率有:1200,2400,4800,9600,19200。列计数器重载值,通信误差如下表: 因此,在通信中,最好选用波特率为1200,2400,4800中的一个。 2、通信协议的使用 通信协议是通信设备在通信前的约定。单片机、计算机有了协议这种约定,通信双方才能明白对方的意图,以进行下一步动作。假定我们需要在PC机与单片机之间进行通信,在双方程式设计过程中,有如下约定: 0xA1:单片机读取P0端口数据,并将读取数据返回PC机; 0xA2:单片机从PC机接收一段控制数据; 0xA3:单片机操作成功信息。 在系统工作过程中,单片机接收到PC机数据信息后,便查找协议,完成相应的操作。当单片机接收到0xA1时,读取P0端口数据,并将读取数据返回PC机;当单片机接收到0xA2时,单片机等待从PC机接收一段控制数据;当PC机接收到0xA3时,就表明单片机操作已经成功。 3、硬件连接 51单片机有一个全双工的串行通讯口,所以单片机和计算机之间可以方便地进行串口
C#串口通信:MSComm控件使用详解 目次 MSComm 控件两种处理通讯的方式 CommPort 属性 RThreshold 属性 CTSHolding 属性 SThreshold 属性 CDHolding 属性 DSRHolding 属性 Settings 属性 InputLen 属性 EOFEnable 属性 Handshake 常数 OnComm 常数 InputMode 常数 错误消息 MSComm 控件通过串行端口传输和接收数据,为应用程序提供串行通讯功能。MSComm控件在串口编程时非常方便,程序员不必去花时间去了解较为复杂的API函数,而且在VC、VB、Delphi 等语言中均可使用。Microsoft Communications Control(以下简称MSComm)是Microsoft公司提供的简化Windows下串行通信编程的ActiveX控件,它为应用程序提供了通过串行接口收发数据的简便方法。具体的来说,它提供了两种处理通信问题的方法:一是事件驱动(Event-driven)方法,一是查询法。 1.MSComm控件两种处理通讯的方式 MSComm控件提供下列两种处理通讯的方式:事件驱动方式和查询方式。 1.1 事件驱动方式 事件驱动通讯是处理串行端口交互作用的一种非常有效的方法。在许多情况下,在事件发生时需要得到通知,例如,在串口接收缓冲区中有字符,或者Carrier Detect (CD) 或Request To Send (RTS) 线上一个字符到达或一个变化发生时。在这些情况下,可以利用MSComm 控件的OnComm 事件捕获并处理这些通讯事件。OnComm 事件还可以检查和处理通讯错误。所有通讯事件和通讯错误的列表,参阅CommEvent 属性。在编程过程中,就可以在OnComm事件处理函数中加入自己的处理代码。这种方法的优点是程序响应及时,可靠性高。每个MSComm 控件对应着一个串行端口。如果应用程序需要访问多个串行端口,必须使用多个MSComm 控件。 1.2 查询方式 查询方式实质上还是事件驱动,但在有些情况下,这种方式显得更为便捷。在程序的每个关键功能之后,可以通过检查CommEvent 属性的值来查询事件和错误。如果应用程序较小,并且是自保持的,这种方法可能是更可取的。例如,如果写一个简单的电话拨号程序,则没有必要对每接收一个字符都产生事件,因为唯一等待接收的字符是调制解调器的“确定”响应。 2.MSComm 控件的常用属性 MSComm 控件有很多重要的属性,但首先必须熟悉几个属性。 CommPort 设置并返回通讯端口号。 Settings 以字符串的形式设置并返回波特率、奇偶校验、数据位、停止位。 PortOpen 设置并返回通讯端口的状态。也可以打开和关闭端口。 Input 从接收缓冲区返回和删除字符。 Output 向传输缓冲区写一个字符串。 下面分别描述:
串口是计算机上一种非常通用的设备通信协议。 --------------------------------- 串口的引脚定义: 两个串口连接时,接收数据针脚与发送数据针脚相连,彼此交叉,信号地对应相接即可。--------------------------------- 串口的电气特性: 1)RS-232串口通信最远距离是50英尺 2)RS232可做到双向传输,全双工通讯,最高传输速率20kbps 3)RS-232C上传送的数字量采用负逻辑,且与地对称 逻辑1:-3 ~-15V 逻辑0:+3~+15V 所以与单片机连接时常常需要加入电平转换芯片:
--------------------------------- 串口通信参数: a)波特率:RS-232-C标准规定的数据传输速率为每秒50、75、100、150、300、600、1200、2400、 4800、9600、19200波特。b)数据位:标准的值是5、7和8位,如何设置取决于你想传送的信息。比如,标准的ASCII码是0~127(7位);扩展的ASCII码是0~255(8位)。 c)停止位:用于表示单个包的最后一位,典型的值为1,1.5和2位。由于数是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。d)奇偶校验位:在串口通信中一种简单的检错方式。对于偶和奇校验的情况,串口会设置校验位(数据位后面的一位),用一个值确保传输的数据有偶个或者奇个逻辑高位。例如,如果数据是011,那么对于偶校验,校验位为 0,保证逻辑高的位数是偶数个。如果是奇校验,校验位位1,这样就有3个逻辑高位。 --------------------------------- 串口通信的传输格式:串行通信中,线路空闲时,线路的TTL电平总是高,经反向RS232的电平总是低。一个数据的开始RS232线路为高电平,结束时Rs232为低电平。数据总是从低位向高位一 位一位的传输。示波器读数时,左边是数据的高位。 例如,对于16进制数据55aaH,当采用8位数据位、1位停止位传输时,它在信号线上的波形如图1(TTL电平)和图 2(RS-232电平)所示。 55H=01010101B,取反后10101010B,加入一个起始位1,一个停止位0,55H的数据格式为1010101010B; aaH=10101010B,取反后01010101B,加入一个起始位1,一个停止位0,55H的数据格式为1101010100B;
串口是计算机上一种非常通用设备通信的协议(不要与通用串行总线Universal Serial Bus或者USB混淆)。大多数计算机包含两个基于RS232的串口。串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。同时,串口通信协议也可以用于获取远程采集设备的数据。 串口通信的概念非常简单,串口按位(bit)发送和接收字节。尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。它很简单并且能够实现远距离通信。比如IEEE488定义并行通行状态时,规定设备线总常不得超过20米,并且任意两个设备间的长度不得超过2米;而对于串口而言,长度可达1200米。 典型地,串口用于ASCII码字符的传输。通信使用3根线完成:(1)地线,(2)发送,(3)接收。由于串口通信是异步的,端口能够在一根线上发送数据同时在另一根线上接收数据。其他线用于握手,但是不是必须的。串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。对于两个进行通行的端口,这些参数必须匹配: a,波特率:这是一个衡量通信速度的参数。它表示每秒钟传送的bit的个数。例如300波特表示每秒钟发送300个bit。当我们提到时钟周期时,我们就是指波特率例如如果协议需要4800波
特率,那么时钟是4800Hz。这意味着串口通信在数据线上的采样率为4800Hz。通常电话线的波特率为14400,28800和36600。波特率可以远远大于这些值,但是波特率和距离成反比。高波特率常常用于放置的很近的仪器间的通信,典型的例子就是GPIB 设备的通信。 b,数据位:这是衡量通信中实际数据位的参数。当计算机发送一个信息包,实际的数据不会是8位的,标准的值是5、7和8位。如何设置取决于你想传送的信息。比如,标准的ASCII码是0~127(7位)。扩展的ASCII码是0~255(8位)。如果数据使用简单的文本(标准ASCII码),那么每个数据包使用7位数据。每个包是指一个字节,包括开始/停止位,数据位和奇偶校验位。由于实际数据位取决于通信协议的选取,术语“包”指任何通信的情况。 c,停止位:用于表示单个包的最后一位。典型的值为1,1.5和2位。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时 也越慢。 d,奇偶校验位:在串口通信中一种简单的检错方式。有四种检错方式:偶、奇、高和低。当然没有校验位也是可以的。对于偶
串行口通信原理及操作流程 51单片机得串行口就是一个可编程全双工得通信接口,具有UART(通用异步收发器)得全部功能,能同时进行数据得发送与接收,也可以作为同步移位寄存器使用。 51单片机得串行口主要由两个独立得串行数据缓冲寄存器SBUF(发送缓冲寄存器与接收缓冲寄存器)与发送控制器、接收控制器、输入移位寄存器及若干控制门电路组成。 51 单片机可以通过特殊功能寄存器SBUF队串行接收或串行发送寄存器进行访问,两个寄存器共用一个地址99H,但在物理上就是两个独立得寄存器,由指令操作决定访问哪一个寄存器。执行写指令时访问串行发送寄存器;执行读指令时,访问串行接收寄存器。(接收器具有双缓冲结构,即在接收寄存器中读出前一个已接收到得字节之前,便能接收第二个字节,如果第二个字节已接收完毕,而第一个字节还没有读出,则将丢失其中一个字节,编程时应引起注意。对于发送器,因为就是由 cpu控制得,所以不需要考虑。 与串行口紧密相关得一个特殊功能寄存器就是串行
口控制寄存器SCON,它用来设定串行口得工作方式、接收/发送控制以及状态标志等。 串行口控制寄存器SCON 串行口控制寄存器SCON在特殊功能寄存器中,字节地址为98H,可位寻址,单片机复位时SCON全部被清零。 位序号 D7 D6 D5 D4 D3 D2 D1 D0 位符号 SM0 SM1 SM2 REN TB8
RB8 T1 R1 SM0,SM1为工作方式选择位。串行口有四种工作方式,它们由SM0、SM1设定。其中方式一最为常用。 SM2为多机通信控制位。 REN为允许串行接收位。 TB8为方式2、3中方式数据得第九位。 RB8为方式2、2中接收数据得第九位。 TI为发送中断标志位,在方式0时,当串行发送第8位数据结束时,或在其她方式,串行发送停止位得开始时,由内部硬件使TI置一,向CPU发出中断申请。在中断服务程序中,必须使用软件将其清零,取消此中断申请。 RI为接收中断标志位。在方式0时,当串行接收第8位数据结束时,或在其她方式,串行接收停止位得中间时,由内部硬件使RI置一,向CPU发出中断申请。在中断服务程序中,必须使用软件将其清零,取消此中断申请。 串口工作方式1简介(0、2、3以后再说),串行口方式传送1帧数据共10位,其中一位起始位(0),八位数据位(最低位在前,高位在后),一位停止位(1)。帧与帧之间可以有空闲,也可以无空闲。TXD(P3、1)位
MFC串口通信编程介绍 主要介绍了用CreateFile(函数和WriteFile(函数读写串口的实例,以及设置串口属性的实例. 在工业控制中,工控机(一般都基于Windows平台经常需要与智能仪表通过串口 进行通信.串口通信方便易行,应用广泛. 一般情况下,工控机和各智能仪表通过RS485总线进行通信.RS485的通信方式是半双工的,只能由作为主节点的工控PC机依次轮询网络上的各智能控制单元子节点.每次通信都是由PC机通过串口向智能控制单元发布命令,智能控制单元在接收到正确的命令后作出应答. 在Win32下,可以使用两种编程方式实现串口通信,其一是使用ActiveX控件,这种方法程序简单,但欠灵活.其二是调用Windows的API函数,这种方法可以清楚地掌握串口通信的机制,并且自由灵活.下面只介绍API串口通信部分. 串口的操作可以有两种操作方式:同步操作方式和重叠操作方式(又称为异步操作方式.同步操作时,API函数会阻塞直到操作完成以后才能返回(在多线程方式中, 虽然不会阻塞主线程,但是仍然会阻塞监听线程;而重叠操作方式,API函数会立即返回,操作在后台进行,避免线程的阻塞. 无论哪种操作方式,一般都通过四个步骤来完成: (1打开串口 (2配置串口 (3读写串口 (4关闭串口
一打开串口 Win32系统把文件的概念进行了扩展.无论是文件、通信设备、命名管道、邮件槽、磁盘、还是控制台,都是用API函数CreateFile来打开或创建的.该函数的原型为: HANDLE CreateFile( LPCTSTR lpFileName, DWORD dwDesiredAccess, DWORD dwShareMode, LPSECURITY_ATTRIBUTES lpSecurityAttributes, DWORD dwCreationDistribution, DWORD dwFlagsAndAttributes, HANDLE hTemplateFile; ?lpFileName:将要打开的串口逻辑名,如“COM1”; ?dwDesiredAccess:指定串口访问的类型,可以是读取、写入或二者并列; ?dwShareMode:指定共享属性,由于串口不能共享,该参数必须置为0; ?lpSecurityAttributes:引用安全性属性结构,缺省值为NULL; ?dwCreationDistribution:创建标志,对串口操作该参数必须置为 OPEN_EXISTING; ?dwFlagsAndAttributes:属性描述,用于指定该串口是否进行异步操作,该值为FILE_FLAG_OVERLAPPED,表示使用异步的I/O;该值为0,表示同步I/O操 作;
51单片机串口通信 1./*打开串口调试程序,将波特率设置为9600,无奇偶校验 晶振11.0592MHz,发送和接收使用的格式相同,如都使用 字符型格式,在发送框输入hello,I Love MCU ,在接 收框中同样可以看到相同字符,说明设置和通信正确*/ #include
串口通信详解 一、RS-232 RS-232在1962年发布,命名为EIA-232-E,作为工业标准,以保证不同厂家产品之间的兼容。RS-232-C是美国电子工业协会EIA(Electronic Industry Association)制定的一种串行物理接口标准。RS是英文“推荐标准”的缩写,232为标识号,C表示修改次数。RS-232-C总线标准设有25条信号线,包括一个主通道和一个辅助通道。在多数情况下主要使用主通道,对于一般双工通信,仅需几条信号线就可实现,如一条发送线、一条接收线及一条地线。RS-232-C标准规定的数据传输速率为每秒50、75、 100、150、300、600、1200、2400、4800、9600、19200波特。RS-232-C标准规定,驱动器允许有2500pF的电容负载,通信距离将受此电容限制,例如,采用150pF/m的通信电缆时,最大通信距离为15m;若每米电缆的电容量减小,通信距离可以增加。传输距离短的另一原因是RS-232属单端信号传送,存在共地噪声和不能抑制共模干扰等问题,因此一般用于20m以内的通信。 目前RS-232是PC机与通信工业中应用最广泛的一种串行接口。RS-232被定义为一种在低速率串行通讯中增加通讯距离的单端标准。RS-232采取不平衡传输方式,即所谓单端通讯。 收、发端的数据信号是相对于信号地,如从DTE设备发出的数据在使用DB25连接器时是2脚相对7脚(信号地)的电平,DB25各引脚定义参见图1。典型的RS-232信号在正负电平之间摆动,在发送数据时,发送端驱动器输出正电平在+5~+15V,负电平在-5~-15V 电平。当无数据传输时,线上为TTL,从开始传送数据到结束,线上电平从TTL电平到RS-232电平再返回TTL电平。接收器典型的工作电平在+3~+12V与-3~-12V。由于发送电平与接 收电平的差仅为2V至3V左右,所以其共模抑制能力差,再加上双绞线上的分布电容,其传
串口通讯基础及S3C2410 UART控制器 默认分类2007-04-12 20:33:57 阅读974 评论4 字号:大中小 数据通信的基本方式可分为并行通信与串行通信两种: 并行通信:是指利用多条数据传输线将一个资料的各位同时传送。它的特点是传输速度快,适用于短距离通信,但要求通讯速率较高的应用场合。 串行通信:是指利用一条传输线将资料一位位地顺序传送。特点是通信线路简单,利用简单的线缆就可实现通信,降低成本,适用于远距离通信,但传输速度慢的应用场合。 一、异步通信及其协议 异步通信以一个字符为传输单位,通信中两个字符间的时间间隔是不固定的,然而在同一个字符中的两个相邻位代码间的时间间隔是固定的。 通信协议(通信规程):是指通信双方约定的一些规则。在使用异步串口传送一个字符的信息时,对资料格式有如下约定:规定有空闲位、起始位、资料位、奇偶校验位、停止位。 异步通讯的时序,如图5-1。 其中各位的意义如下: 起始位:先发出一个逻辑”0”信号,表示传输字符的开始。 资料位:紧接着起始位之后。资料位的个数可以是4、5、6、7、8等,构成一个字符。通常采用ASCII 码。从最低位开始传送,靠时钟定位。 奇偶校验位:资料位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验资料传送的正确性。 停止位:它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。 空闲位:处于逻辑“1”状态,表示当前线路上没有资料传送。 波特率:是衡量资料传送速率的指针。表示每秒钟传送的二进制位数。例如资料传送速率为120字符/秒,而每一个字符为10位,则其传送的波特率为10×120=1200字符/秒=1200波特。 注:异步通信是按字符传输的,接收设备在收到起始信号之后只要在一个字符的传输时间内能和发送设备保持同步就能正确接收。下一个字符起始位的到来又使同步重新校准(依靠检测起始位来实现发送与接收方的时钟自同步的。二、资料传送方式 根据资料传送方向的不同有以下三种方式。如图5-2所示。 (1)单工方式(2)半双工方式(3)全双工方式 图5-2 资料传送方式 1、单工方式 资料始终是从A设备发向B设备。 2、半双工方式 资料能从A设备传送到B设备,也能从B设备传送到A设备。在任何时候资料都不能同时在两个方向上传送,即每次只能有一个设备发送,另一个设备接收。但是通讯双方依照一定的通讯协议来轮流地进