第18卷 第2期
强激光与粒子束Vol.18,No.2 2006年2月HIGH POWER LASER AND PARTICLE BEAMS Feb.,2006 文章编号: 1001-4322(2006)02-0291-06
合肥光源逐束团测量和横向束流反馈系统设计
*
王筠华, 刘建宏, 郑 凯, 李为民, 刘祖平, 孙葆根, 杨永良, 周泽然
(中国科学技术大学国家同步辐射实验室,合肥230029) 摘 要: 介绍了在合肥光源开展逐束团测量(横向和纵向)和横向束流反馈系统研究和研制的重要性,
同时还介绍了设计思想。合肥光源高频频率为204MHz ,因此,系统至少需要100MHz 的带宽。还较详细地介
绍了宽带部件和系统参数的选择原则。该系统不仅可用于研究由于高频腔中的高阶模和真空室的阻抗壁效应
所引起的耦合束团不稳定性,而且还能抑制耦合束团不稳定性振荡、快速束流离子不稳定性和注入大幅度振荡
等,从而将提高机器的运行性能。
关键词: 逐束团系统; 耦合束团不稳定性; 高阶模(HOM ); 横向束流反馈系统; 稳定模式
中图分类号: TL506 文献标识码: A
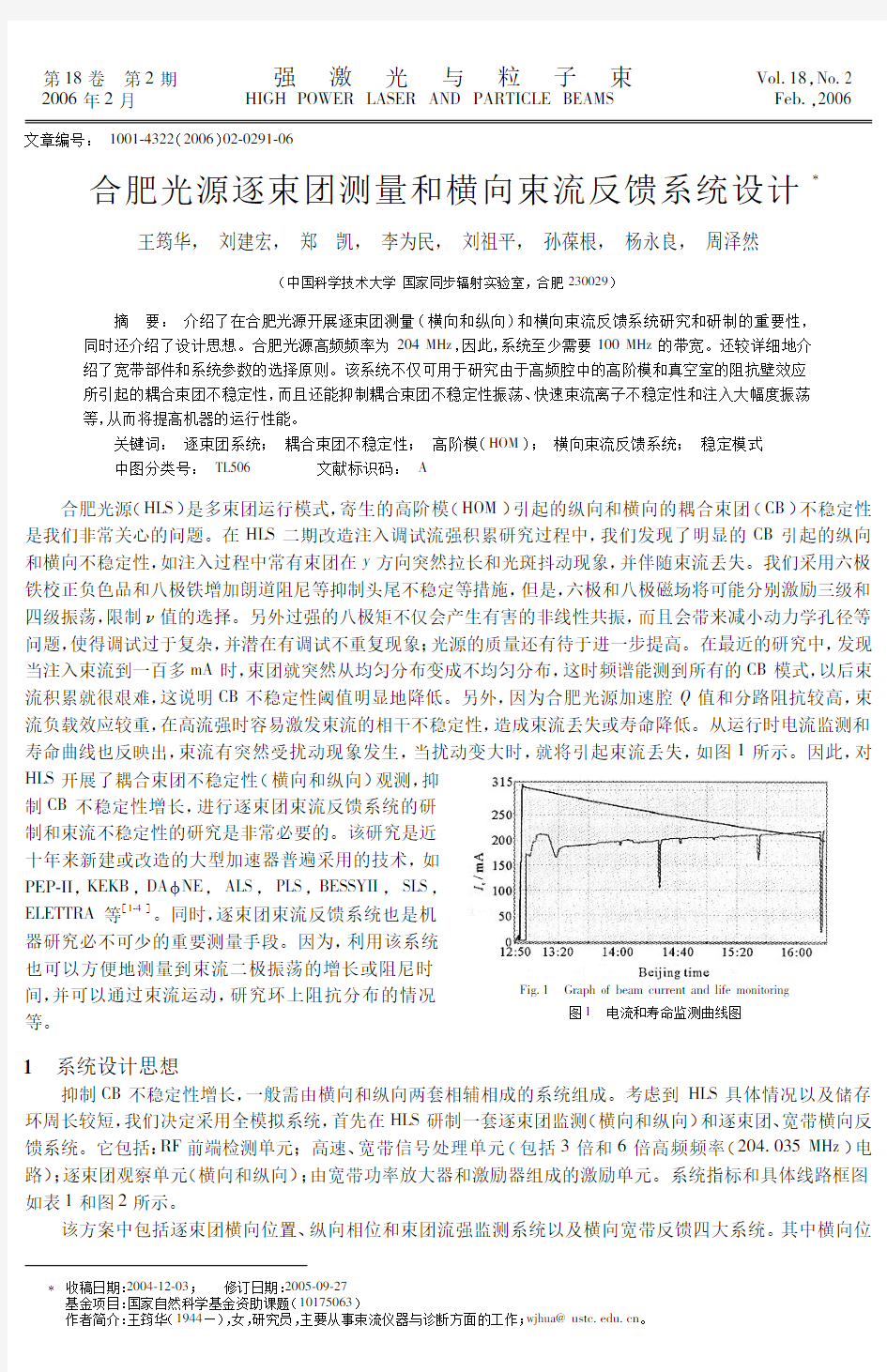
合肥光源(HLS )是多束团运行模式,寄生的高阶模(HOM )引起的纵向和横向的耦合束团(CB )不稳定性是我们非常关心的问题。在HLS 二期改造注入调试流强积累研究过程中,我们发现了明显的CB 引起的纵向和横向不稳定性,如注入过程中常有束团在y 方向突然拉长和光斑抖动现象,并伴随束流丢失。我们采用六极铁校正负色品和八极铁增加朗道阻尼等抑制头尾不稳定等措施,但是,六极和八极磁场将可能分别激励三级和四级振荡,限制v 值的选择。另外过强的八极矩不仅会产生有害的非线性共振,而且会带来减小动力学孔径等问题,使得调试过于复杂,并潜在有调试不重复现象;光源的质量还有待于进一步提高。在最近的研究中,发现当注入束流到一百多mA 时,束团就突然从均匀分布变成不均匀分布,这时频谱能测到所有的CB 模式,以后束流积累就很艰难,这说明CB 不稳定性阈值明显地降低。另外,因为合肥光源加速腔Q 值和分路阻抗较高,束流负载效应较重,在高流强时容易激发束流的相干不稳定性,造成束流丢失或寿命降低。从运行时电流监测和寿命曲线也反映出,束流有突然受扰动现象发生,当扰动变大时,就将引起束流丢失,如图1所示。因此,对Fig.1 Graph of beam current and life monitoring 图1 电流和寿命监测曲线图
HLS 开展了耦合束团不稳定性(横向和纵向)观测,抑
制CB 不稳定性增长,进行逐束团束流反馈系统的研
制和束流不稳定性的研究是非常必要的。该研究是近
十年来新建或改造的大型加速器普遍采用的技术,如
PEP-II ,KEKB ,DA ФNE ,ALS ,PLS ,BESSYII ,SLS ,
ELETTRA 等
[1-4]。同时,逐束团束流反馈系统也是机器研究必不可少的重要测量手段。因为,利用该系统
也可以方便地测量到束流二极振荡的增长或阻尼时
间,并可以通过束流运动,研究环上阻抗分布的情况
等。1 系统设计思想
抑制CB 不稳定性增长,一般需由横向和纵向两套相辅相成的系统组成。考虑到HLS 具体情况以及储存环周长较短,我们决定采用全模拟系统,首先在HLS 研制一套逐束团监测(横向和纵向)和逐束团、宽带横向反馈系统。它包括:RF 前端检测单元;高速、宽带信号处理单元(包括3倍和6倍高频频率(204.035MHz )电路);逐束团观察单元(横向和纵向);由宽带功率放大器和激励器组成的激励单元。系统指标和具体线路框图如表1和图2所示。
该方案中包括逐束团横向位置、纵向相位和束团流强监测系统以及横向宽带反馈四大系统。其中横向位
*收稿日期:
2004-12-03; 修订日期:2005-09-27基金项目:国家自然科学基金资助课题(10175063)
作者简介:王筠华(1944—),女,研究员,主要从事束流仪器与诊断方面的工作;wjhua@https://www.doczj.com/doc/686544133.html, 。
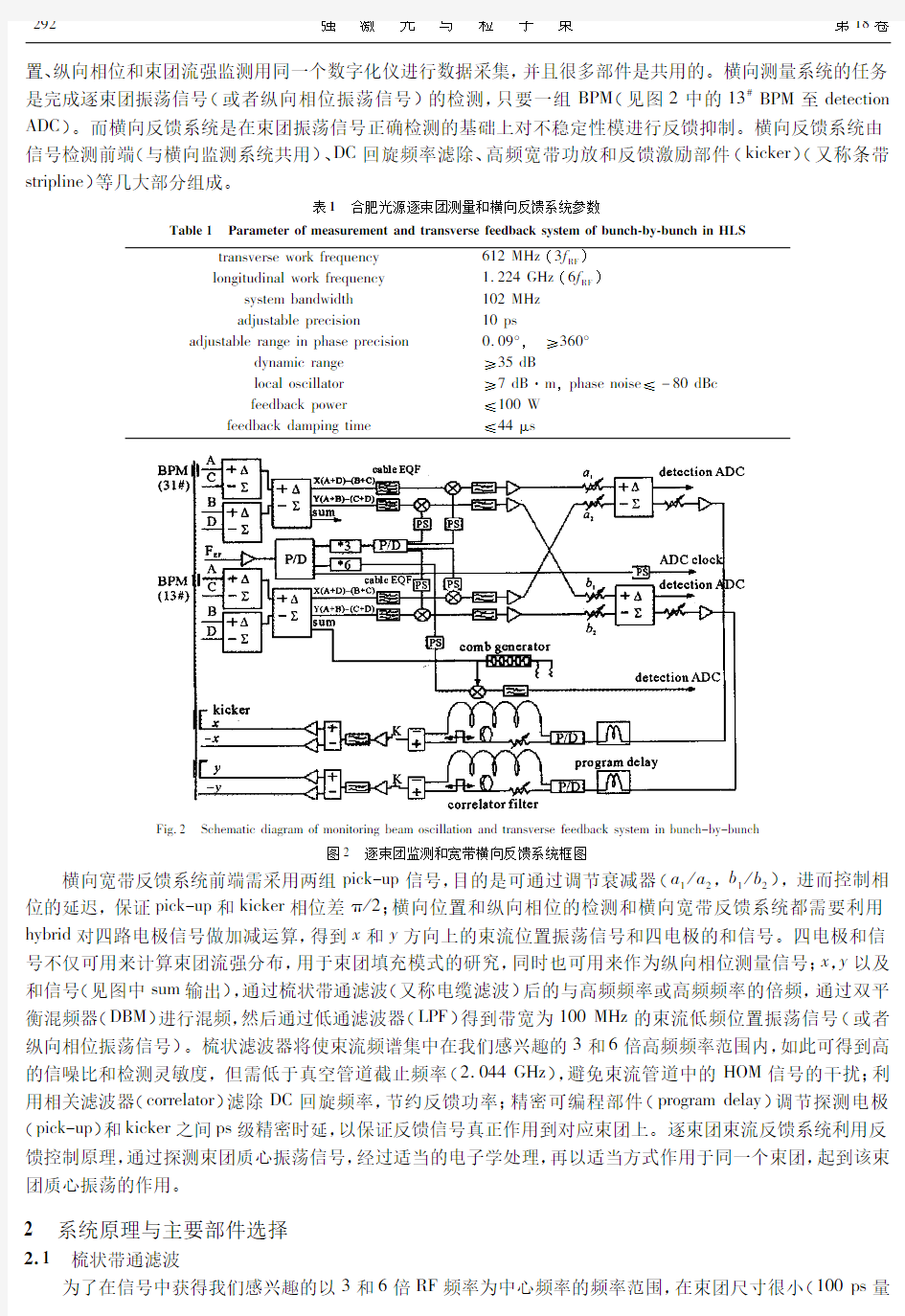
置、纵向相位和束团流强监测用同一个数字化仪进行数据采集,并且很多部件是共用的。横向测量系统的任务是完成逐束团振荡信号(或者纵向相位振荡信号)的检测,只要一组BPM (见图2中的13#BPM 至detection ADC )。而横向反馈系统是在束团振荡信号正确检测的基础上对不稳定性模进行反馈抑制。横向反馈系统由信号检测前端(与横向监测系统共用)、DC 回旋频率滤除、高频宽带功放和反馈激励部件(kicker )(又称条带stripline )等几大部分组成。
表1 合肥光源逐束团测量和横向反馈系统参数
Table 1 Parameter of measurement and transverse feedback system of bunch-by-bunch in HLS
transverse work frequency
612MHz (3f RF )longitudinal work frequency
1.224GHz (6f RF )system bandwidth
102MHz adjustable precision
10ps adjustable range in phase precision
0.09o, ≥360odynamic range
≥35dB local oscillator
≥7dB ?m ,phase noise ≤-80dBc feedback power
≤100W feedback damping time ≤44μs
Fig.2 Schematic diagram of monitoring beam oscillation and transverse feedback system in bunch-by-bunch
图2 逐束团监测和宽带横向反馈系统框图
横向宽带反馈系统前端需采用两组pick-up 信号,目的是可通过调节衰减器(a 1/a 2,b 1/b 2),进而控制相
位的延迟,保证pick-up 和kicker 相位差π/2;
横向位置和纵向相位的检测和横向宽带反馈系统都需要利用hybrid 对四路电极信号做加减运算,得到x 和y 方向上的束流位置振荡信号和四电极的和信号。四电极和信号不仅可用来计算束团流强分布,用于束团填充模式的研究,同时也可用来作为纵向相位测量信号;x ,y 以及
和信号(见图中sum 输出)
,通过梳状带通滤波(又称电缆滤波)后的与高频频率或高频频率的倍频,通过双平衡混频器(DBM )进行混频,然后通过低通滤波器(LPF )得到带宽为100MHz 的束流低频位置振荡信号(或者
纵向相位振荡信号)。梳状滤波器将使束流频谱集中在我们感兴趣的3和6倍高频频率范围内,
如此可得到高的信噪比和检测灵敏度,但需低于真空管道截止频率(2.044GHz ),避免束流管道中的HOM 信号的干扰;利用相关滤波器(correlator )滤除DC 回旋频率,节约反馈功率;精密可编程部件(program delay )调节探测电极(pick-up )和kicker 之间ps 级精密时延,以保证反馈信号真正作用到对应束团上。逐束团束流反馈系统利用反馈控制原理,通过探测束团质心振荡信号,经过适当的电子学处理,再以适当方式作用于同一个束团,起到该束团质心振荡的作用。
2 系统原理与主要部件选择
2.1 梳状带通滤波
为了在信号中获得我们感兴趣的以3和6倍RF 频率为中心频率的频率范围,在束团尺寸很小(100ps 量
292强激光与粒子束第18
卷
级)时,下列两种模拟滤波是很好的选择:一种是很简单地使用功分器/结合器+延时电缆构成;另一种是各电缆之间的延时差为与中心频率对应的周期的倍数,如图3中(a )所示。图3(b )是使用微带线延时耦合来实现带通滤波,工作原理与定向耦合器相似。两类滤波器时域输出均为一串脉冲,频域相当于带通。因为图3(a )所示的线路简单易行,我们采用RG-223/U 电缆制作3-tap 和4-tap 电缆滤波,以期获得600MHz 和1.2GHz 中心频率信号。
Fig.3 Comb-like band pass filter
图3 梳状带通滤波器
2.2 信号处理仿真
为了研究检测信号的真实性和可行性,我们对将要检测的信号进行了仿真模拟,获得如图4、图5和图6
Fig.4 Output time waveform by band pass filter (3f RF )for detecting signal
图4 探测的信号经梳状滤波器(3f RF )
滤波后的时域波形Fig.5 Simulated spectrum of output after the signal passed the band pass filter
图5 模拟信号经过BPF 滤波后的频域结果
的结果。下面我们将以均方根半宽度σ=6cm 束团为例,在时域和频域仿真整个信号处理过程。假设束团电流分布满足高斯分布
i b (t )=
Q b 2ヘ
π(σ/C )exp [-t 2
2(σ/C )2](1) 安装在环上的钮扣电极型BPM 是电容式的,束长远大于钮扣大小。所以通常钮扣电极相当于对感应的单极性高斯束流脉冲作微分操作。进而再经过电容电阻并列组成的阻抗产生压降。若电极直径为d ,对电极电荷分布取近似后,电极感应电荷可以表达为
q (t )=d 2
8a I 2ヘπσf 0F (δ,θ)exp (-c 2t 22σ2)(2)则感应电压为V (t )=F -1[R /(1+j ωRC )](d q /d t )。这里,R =50Ω为信号匹配电阻,C 为pF 量级(可以忽392第2期
王筠华等:HLS
逐束团测量和横向束流反馈系统设计
略),a 为BPM 的几何半径,f 0为回旋频率,F (δ,θ)是束流位置的函数,以横向检测电路为例,σ=6cm 的高斯
型束团被探测电极检测,经梳状滤波器(3f RF )
滤波后的时域波形和频域谱分布分别为y 1(t )=d V (t )d t , y 1(ω)=j ωV (ω)y 2(t )=y 1(t )+y 1(t -T )-y 1(t -2T ), T =1/(3f RF )y 2(ω)=y 1(ω)+[1+exp (-j ωT )+exp (-2j ωT {
)](3) 将y 2(t )
与来自倍频电路中的3f RF (3×204MHz )混频,输出经过100MHz 低通滤波器滤波,结果见图6和图7。Fig.6 Spectrum of mixed signal after
100MHz low pass filtering
图6 混频结果经100MHz 低通的输出频谱Fig.7 Corresponding time waveform for Fig.6after 100MHz pass filtering 图7 对应图6的时域输出波形
从图5~图7可以看!,在612MHz 处谱线远远高于其他的谱成分,再经过100MHz 低通后,虽然波形宽度大于5ns ,但是显然这个脉冲在距离峰中心5ns 的幅度已经很小,可以认为束团在峰中心处的值不受别的束团的影响,达到了分辨束团的目的。
2.3 Pickup 选择
Pickup 采用环上原来布局的钮扣电极。每个BPM 具有4个倾斜45o放置的电极。而宽带反馈系统前端需采用两组pick-up 信号。不仅应该选择在色散函数较小,而β函数相对大的地方,而且两个BPM 之间的相位差尽可能90o(或者70o)。因为采用两个相位相差90o的BPM 信号的线性组合,可以在任意pickup-kicker 间距和任意储存环工作点的情况下,方便地得到所需要的90o相移。如选择相位差为φ0的两个BPM ,束位置信号分别为x 1和x 2。
x 1=a 1βヘ1sin [φ1(s )]x 2=a 2βヘ2sin [φ1(s )+φ0{
](4)
因此,它们的组合和为x =x 1+x 2=[(a 1βヘ1+a 2βヘ2cos φ0)2+(a 2βヘ2sin φ0)2]1/2sin [φ1(s )+Δφ]Δφ=tan -1[
(a 2βヘ2sin φ0/(a 1βヘ1+a 2βヘ2cos φ0{)](5)
因此,我们选择31#(Q2E )和13#(Q2S ),这两BPM 之间相位差:Δφx =97.6o,Δφy =94.7o。按照信号处理的要
求,角度差越接近90o则可调的范围越大,这两个BPM 的选择是令我们满意的。βpk1和βpk2分别为两个BPM 处的β函数。
2.4 反馈激励单元
目前对于预研制,希望借用位于HLS 储存环第三象限直线段上的75cm 条带电极反馈激励器。为此,我
表2 激励电极(stripline )的参数
Table 2 Parameters of stripline as kicking device electrode length /mm
750(1/4wavelength as 100MHz )electrode radius /mm
40.6space between electrode and duct wall /mm
1vacuum duct radius /mm
44electrode open angle /(o)13.1
492强激光与粒子束第18卷
们对它需要进行细致研究与分析,它的结构图参见文献[5]。电极参数见表2。条带长75cm ,覆盖角度为13.1o,连结50Ω的匹配电阻,上游端接管壁(地),另一端接收来自功率放大器输出的激励信号。
3 系统主要参数
逐束团束流反馈系统的主要参数包括:系统带宽,最大输出电压,最大输出功率等。这些参数由储存环参数决定。
3.1 系统带宽的选择
为了抑制所有可能的不稳定的CB 模式,整个反馈系统各部件带宽必须不小于束团频率的一半,即
Δf ≥12f b =102MHz (6)
从提高信噪比的角度出发,测量电路带宽越窄越好,但是太窄则无法区分各个束团,此处我们用一个简
化的束团情况来估算最小所需带宽。假设束团呈点状,则电荷密度
[6]λ(t )=N e c Σ∞b =1Σ∞k =-∞δ[t -(b M
+k )T 0-тb ](7)式中:N e 为束团填充的电子数;M 为谐波数;тb 为纵向振荡
тb =тs cos
(Ωs t +ψb )(8)对(8)式作Fourier 变换,出现下列非零项
ωp ,n =(pM +n +mQ s )
ω0(9)
p =0,±1,±2,…,整数,m ,n 为不稳定性模数。束流可能的频谱成分如图8所示。Fig.8 Periodic beam spectrum with possible components
图8 束流可能的频谱成分
显然各成分是以M ω0为周期,而-M ω0/2到零一段频谱实际上对应于M ω0/2到M ω0的谱成分,所以测量电路至少需要M ω0/2的带宽,如图6中代表的低通所示。由于逐束团反馈系统要对不同束团的振荡分别进行阻尼,系统的响应时间必须能够分辨出相邻的两个束团,相当于以束团频率进行采样。以这样的带宽设计的系统,只能分辨出不同的束团,而不能对束团的头尾进行不同的处理,故而只能阻尼二级CB 不稳定性,而不能阻尼更高阶次的振荡。
3.2 最大输出电压
[7-8] 束团每运动一圈反馈系统能够提供给束团的kicker 电压决定了束团一圈的x',y'的变化量,直接决定了反馈系统可以提供的阻尼率。物理上,每圈反馈系统提供的kicker 电压ΔV FB 必须不小于环上所有其他阻抗加在束团上的激励电压,只有这样才能够起到阻尼束团振荡的作用。在实际的反馈系统设计中,可以由环上阻抗计算出束团运动的增长率,让反馈系统提供与之相当的阻尼率。这样,对横向系统(以x 方向为例),所需加的横向电压为
V FB ⊥=2
T 0тFB E e
Δx βpk βヘk
(10)式中:Δx 为束流的最大振幅;βpk 和βk 分别为pickup 和kicker 处的β函数。对于HLS 储存环,βpk =11m ,βk =
7.913m ,Δx =1mm ,取тFB 应小于横向CB 模式的最快增长时间。3.3 最大输出功率
通过反馈作用器件kicker 作用到束团运动上的最大输出功率,取决于要求反馈系统能够阻尼的束团最大振荡幅度。需要提供给束团的最大功率受到kicker 分流阻抗的直接影响,因为束团感受到的是电压,要产生一592第2期王筠华等:HLS 逐束团测量和横向束流反馈系统设计
定的电压,kicker的阻抗越高,需要的功率就越小。它们之间的关系是
P=1
2
ΔV2FB
R
k
(11)
式中:V
FB 为每圈需要提供给束团的反馈电压;R
k
为kicker的分流阻抗,对于我们所采用的kicker(即stripline),
R
k =11.668kΩ。因此,如果经过200圈抑制,则т
FB
=44μs,那么,运行在800MeV时,所需要的功率P=
31.47W。因为该stripline分流阻抗较高,所以反馈效率也较高。
4 结论
从目前机器运行调试情况和我们所测量到的数据分析,开展HLS多束团纵向和横向CB不稳定性的研究是非常必要的。尤其,随着机器运行时间的推移,器件性能将有所变化,围绕储存环性能改善的深入研究是一个长期的任务,HLS逐束团测量和横向束流反馈系统设计系统需要进一步深入地进行下去。
致谢感谢高能所马力研究员和上海三代光源刘德康研究员等同仁们给予的很多有益的讨论和帮助。
参考文献:
[1]Fox J D.Bunch feedback systems and signal processing[C]//Beam Measurement,Proceedings of the Joint US-Cern-Japan-Russia School on Particle Accelerators.World Scientific Publishing Co,1999.
[2]Cappi R,Metral E,Mohl D,et al.Transverse coherent instabilities in the presence of linear couping[C]//EPAC’2000.2000.
[3]Gao J.Theory of single bunch transverse collective instabilities in electron storage ring[C]//EPAC’96.1996.
[4]Kikutani E,Tobiyama.Strategy for developing fast bunch feedback systems for KEKB[C]//Proceeding of PAC’97.Vancouver,BC,Canada,1997.[5]王筠华,贡顶,刘建宏,等.模拟低频反馈系统初步尝试[J].强激光与粒子束,2004,16(4):521-525.(Wang J H,Gong d,Liu J H,et al.Pri-mary attempt for simulating feedback system of low frequency.High Power Laser and Particle Beams,2004,16(4):521-525)
[6]Serio M,Boni R,Gelle A,et al.Multibunch instabilities and cures[C]//EPAC96.Barcelona,Spain.
[7]马力.束流反馈系统[R].北京:中国科学院高能物理研究所,2003:1-15.(Ma L.Beam feedback system.Beijing:Institute of High Energy Phys-ics,Chinese Academy of Sciences,2003:1-15)
[8]Barry W,Byrd J M,Corlett J N,et al.Design of the ALS transverse coupled-bunch feedback system[C]//1993Particle Accelereter Conerence.
1993:2109-2111.
Design of bunch-by-bunch measuring and transverse feedback system at HLS
WANG Jun-hua,LIU Jian-hong,ZHENG Kai,LI Wei-min,LIU Zhu-ping,
SUN Bao-gen,YANG Yong-liang,ZHOU Ze-ran
(National Synchrotron Radiation Laboratory,University of Science and Technology of
China,P.O.Box6022,Hefei230029,China)
Abstract:In order to cure and suppress beam instabilities caused by the high order modes(HOM)in the RF cavity and the resis-tive wall impedance of the vacuum chamber,a bunch by bunch measuring and transverse feedback system of broad band with two BPM is under development now.It can detect and analyze the coupled-bunch(CB)instabilities in time and frequency domain,bunch filling pat-tern in injection and injection ratio,and suppress CB instability for advanced machine performance.The design concepts and detailed de-velopment of the system are presented in this paper.The high frequency of HLS is204MHz,which requires the bandwidth of the feedback system wider than100MHz.The primary ideas to choose the broad-band components and the system parameters are also expounded.
Key words:Bunch-by-bunch system;Coupled-bunch instability;Higher order modes;Transverse feedback system;Insta-bilities mode
692强激光与粒子束第18卷
纵向上要系统衔接,横向上要有机结合 数学本身不是孤立的。每一节教学内容都与本册的其他内容以及与之相衔接的后续课程内容存在着内在的、必然的联系。教学时,教师要深入挖掘教材,找出相互联系的内容和最佳结合点,进行整体和谐施教。在教学中特别要注意坚持以下四条原则。 (一)教一科想各科 为什么要教一科想各科?学校的各科教学内容是一个综合性的整体系统。它们之间相互影响,相互渗透,相互联系。为此,数学教学应考虑把与其他学科相互配合的内容,提炼出来,配合其他学科教学。这样会形成教学的合力,在学生的头脑中构建起知识网络,有利于知识的理解、深化和数学素养的形成。 如比例问题,在其他各科教学中不时用到,我在教学中就着意作了讲解。有一次上自习课,我给学生出了这样一个题目:“联系你的生活实际,谈谈你对比例应用题的理解。” 这个题目说深倒也很深,因为需要论述,但说浅也浅得见底,因为既然学会了比例应用题,“理解”当然不成问题。主要是学生怎样抓住要点,展开思路,这就看教师引导点拨的功夫了。 怎样写呢?我先让学生把关于比例知识的应用题复习一下,再把自己体会最深的事与比例问题加以比较,弄清事物中几个量的比例关系,然后再按想好的顺序,一层一层地写。 学生开始动笔了,我在桌间一边巡视,一边解答同学们提出的疑难,倾听他们的想法。 “赵老师,我想写栽树,昨天栽树时,我发现每行的棵数一定,行数越多,栽的树就越多……” “赵老师,我想写吃米问题,我妈妈买了一袋米,如果我家每天吃1千克,可以吃到过年,如果每天吃2千克,就得再买一袋。” 有一个同学经常到姥姥家去,他写道:“我学了比例一章以后,知道了什么叫比例,什么是正比例,什么是反比例。我在生活中,经常和比例问题打交道,但体会最深的还是坐火车。我常在周日坐火车到姥姥家。姥姥家在大安。从白城到大安总路程138公里。我为了快些到姥姥家,在那多玩一会儿,所以,我每次都坐快车,因为快车用的时间少,慢车用的时间多。这就是距离一定,速度和时间成反比例。在列车上,我不停地看着手表,计算着路程……” 看了同学们写的,我的思路更加明朗清晰了。 通过长期反复的实践,我深刻地感触到“教一科想各科”必须要求教师在教学中树立整体思想,从学生全面发展出发,牢固地把握各科教材在知识、方法、思想等方面存在的横向
第16卷 第10期 强激光与粒子束Vol.16,No.10 2004年10月 HIGH POWER LASER AND PARTIC LE BE AMS Oct.,2004 文章编号: 100124322(2004)1021353203BEPC Ⅱ横向束流反馈系统条带电极的 设计及模拟计算 X 岳军会, 袁任贤, 马 力, 曹建社 (中国科学院高能物理研究所,北京100039) 摘 要: 用高频结构模拟程序HFSS 优化设计条带电极kicker 并计算了它的反射参数和横向分流阻抗。 从模拟得到的反射参数可以看出,在要求的250MH z 带宽范围内,反射的功率小于7%,说明了条带与功率传输 线是阻抗匹配的;模拟得到的横向分流阻抗与公式计算得到的结果基本上一致。当频率250MH z 时,得到了1 300 Ω的分流阻抗,在此种条件下,需要反馈功率为123W 方能抑制束流不稳定性,这为电极的机械设计和在反馈系统中选择功率放大器提供了最基本的依据。 关键词: 束流不稳定性; 横向反馈系统; 条带电极; 分流阻抗; 高频结构模拟程序 中图分类号: T L501 文献标识码: A Fig.1 S tripline electrode kicker m odel 图1 HFSS 中采用的条带电极kicker 模型BEPC Ⅱ是一个多束团,大流强的设备,由于高频腔的高次模和 电阻壁阻抗等因素,不可避免地会出现束流不稳定性[1]。BEPC Ⅱ中 采用束流反馈系统来抑制这种不稳定性,以提高束流强度和束流的 寿命。在BEPC Ⅱ横向反馈系统中,采用两个在相位上大致接近于 90°的位置探测BPM ,通过hybrid 网络得到x 和y 方向的位置信号, 然后送到前端电子学,将处于中心频率为1.5GH z ,带宽为250MH z 的信号转换为40kH z ~250MH z 的低频信号,再通过信号处理系统, 将此信号的相位变化90°,最后激励功率放大器和kicker 使它们作 用于束团。反馈系统最重要的一个指标就是反馈功率,这与kicker 使之的设计不无关系。图1是我们要采用的模型。 1 电磁场设计 各个加速器上常采用横向条带电极kicker [2~5],如图2所示,通用水平(或垂直)方向由一对条带组成,每一条带各有一个输入端口和一个输出端口。每个端口用50Ω标准传输电缆输入功率,我们取系统的带宽为250MH z 。每一个条带与真空壁构成一个传输线,可以通过调节条带与管壁之间的距离和调整条带的宽度来保证传输线的特性阻抗满足50Ω。一般情况下,我们取电极的长度为30cm ,条带的张角为88°,厚度取2mm ,它距离管壁的距离为17mm ,真空管道在有电极的那一段半径为65mm 。所有参数如表1所示 。 Fig.2 T ransverse kicker 图2 横向kicker 示意图表1 电极的参数 T able 1 P arameters of the stripline electrode stripline length /mm 300stripline radius /mm 48stripline thickness /mm 2radius of vacuum pipe /mm 75stripline coverage degree/(° )88kicker total length with flange /mm 620X 收稿日期:2004205209; 修订日期:2004206228 作者简介:岳军会(1977— ),男,博士生,研究方向为束流测量系统;北京市918信箱9分箱;E 2mail :yuejh @https://www.doczj.com/doc/686544133.html, 。
SXFEL腔式束流位置测量系统关键技术研究上海软X射线自由电子激光(SXFEL)是中国第一台能辐射出X射线的相干光源,主要由光阴极注入器、主加速器和两级高增益谐波放大器(波荡器)组成,其目标是在软X射线波段区实现9nm出光并验证级联的高增益谐波放大模式的可行性。为降低FEL辐射输出功率的衰退,在波荡器段要求电子束轨道与光子束的轨迹尽可能重合,使二者能有效地进行相互作用从而实现高效的能量转换和传输。为实现上述目标,对束流横向位置测量系统的指标要求,是在±500μm动态范围内位 置分辨率好于1μm(束团电荷量500pC条件下)。在此背景下,本课题从腔式BPM 的基本原理出发,采用数值仿真和束流实验相结合的方法,较为全面地分析了影 响腔式BPM(CBPM)系统性能的主要因素,提出了相应的优化方案;完成了CBPM系 统的研制和搭建,完善了在线信号处理算法,进而形成了一套完整的腔式束流位 置在线测量系统。 研究内容主要包括:1、研究了腔体间串扰的评估方法以及串扰对测量分辨率的影响。通过分析腔体间串扰产生的机理以及腔体模式信号的特性(谐振频率、Q 值、位置依赖/独立性等),提出了可基于束流条件下进行腔体间串扰评估的主成分分析(PCA)和谐波分析方法。借助上海深紫外FEL(SDUV-FEL)和大连相干光源(DCLS)的测试平台完成了束流实验并验证了评估方法的实用性。最后讨论了腔体间的串扰程度对束流位置测量的精度和分辨率带来的影响。 2、分析了束流倾角入射对位置测量分辨率的影响。采用路径积分方法对束流倾角入射和束团自身的倾角对束流位置测量分辨率的影响进行了定量的数值 仿真分析;设计并完成了专项束流实验(结合矫正铁和相邻的CBPM)对上述分析 结果进行验证,实验结果与仿真预期相符,据此提出了SXFEL装置中CBPM探头偏心100μm运行的方案以确保系统分辨率满足要求。3、研究了本振信号幅相稳定性对CBPM系统性能的影响。通过数值仿真计算了LO信号幅度和相位的抖动对中频信号幅相提取精度的影响,根据分析结果,优化了LO源的工艺技术指标要求。 在SXFEL上采用相邻两个相位腔进行了信号幅相提取精度的对比实验,在其它配置不变的条件下,采用优化后的本振源可将电荷量相对测量分辨率从0.144%提高到0.076%,将束流到达时间分辨率从1ps提高到80fs,测试结果验证了仿真的正确性,也极大地优化了系统的性能。4、研究了时序信号(触发/ADC采样时钟)
直线加速器电子束流能量的测量 电子直线加速器最重要的束流参数是束流的能量、流强、能散度和发射度 束流能量是影响电子直线加速器性能最重要的因素之一 对于脉冲型电子直线加速器,电子束的能量测量方法通常有:磁偏转法、半价层法、射程法等 一测量原理 1.1磁偏转法 能谱测量原理示意图 磁偏转法通常用于测量电子束的能谱,进而得出电子束的能量E0。 磁偏转法测量电子束能谱的原理如上图所示:从加速器引出的电子垂直于磁场射,会受到洛伦兹力的作用而发生偏转,其偏转半径为R,磁场B 与偏转半径的关系为: 其中,B 为磁场中的磁感应强度,e 为电子电量,R 为回旋半径,v 为电子运动速度。 考虑相对论效应,可以将上式写为: 其中β=v/c,c 为光速,γ 为相对论因子,γ 与β 满足关系: 电子的动能为: 由上述几个公式可以求得电子能量E 与磁感应强度B的关系为:
因此,对于已知磁场B,理论上只需要测出电子的回旋半径R,即可进一步算出电子的能量。为提高测试精度,在电子进入磁分析器之前,需要对其进行准直。通常采用带狭缝的石墨块,其厚度略大于电子在其中的射程;设准直缝距磁极边缘为L,此即分析器的物点O 由于从加速器引出的电子能量具有一定的能散ΔE,因此,对于流强较大的电子束,常用的方法是采用扫描的工作方式,在位置J 处放置一个法拉第筒用于接收电子,使偏转半径为R 的电子能够被接收,通过改变磁场B 使不同能量的电子都被法拉第筒接收,得到一条B-I 曲线,由于B 与能量存在公式所示的定量关系,因此通常直接做出E-I 曲线,即能谱分布曲线,如下图所示的是一条能谱分布曲线,其中纵坐标表示归一化电流,横坐标为能量。 采用磁分析法得到的能谱分布曲线 其中峰值处的横坐标值即对应电子束的能量E0 1.2 半价层法 加速器加速电子打靶所产生的X 射线本质上是具有相当能量的电磁辐射光子,光子的能量近似等于入射电子的能量,因此可以通过测量光子能量的方法间接得到电子能量。辐射光子流在物质中的衰减规律服从简单的指数关系如下:
载流子迁移率测量方法总结 引言 迁移率是衡量半导体导电性能的重要参数,它决定半导体材料的电导率,影响器件的工作速度。已有很多文章对载流子迁移率的重要性进行研究,但对其测量方法却少有提到。本文对载流子测量方法进行了小结。 迁移率μ的相关概念 在半导体材料中,由某种原因产生的载流子处于无规则的热运动,当外加电压时,导体内部的载流子受到电场力作用,做定向运动形成电流,即漂移电流,定向运动的速度成为漂移速度,方向由载流子类型决定。在电场下,载流子的平均漂移速度v与电场强度E成正比为: 式中μ为载流子的漂移迁移率,简称迁移率,表示单位电场下载流子的平均漂移速度,单位是m2/V·s 或cm2/V·s。 迁移率是反映半导体中载流子导电能力的重要参数,同样的掺杂浓度,载流子的迁移率越大,半导体材料的导电率越高。迁移率的大小不仅关系着导电能力的强弱,而且还直接决定着载流子运动的快慢。它对半导体器件的工作速度有直接的影响。 在恒定电场的作用下,载流子的平均漂移速度只能取一定的数值,这意味着半导体中的载流子并不是不受任何阻力,不断被加速的。事实上,载流子在其热运动的过程中,不断地与晶格、杂质、缺陷等发生碰撞,无规则的改变其运动方向,即发生了散射。无机晶体不是理想晶体,而有机半导体本质上既是非晶态,所以存在着晶格散射、电离杂质散射等,因此载流子迁移率只能有一定的数值。 测量方法 (1)渡越时间(TOP)法 渡越时间(TOP)法适用于具有较好的光生载流子功能的材料的载流子迁移率的测量,可以测量有机材料的低迁移率。 在样品上加适当直流电压,选侧适当脉冲宽度的脉冲光,通过透明电极激励样品产生薄层的电子一空穴对。空穴被拉到负电极方向,作薄层运动。设薄层状况不变,则运动速度为μE。如假定样品中只有有限的陷阱,且陷阱密度均匀,则电量损失与载流子寿命τ有关,此时下电极上将因载流子运动形成感应电流,且随时间增加。在t时刻有:
控制工程学院课程实验报告: 现代控制理论课程实验报告 实验题目:状态反馈控制系统的设计与实现 班级自动化(工控)姓名曾晓波学号2009021178 日期2013-1-6 一、实验目的及内容 实验目的: (1 )掌握极点配置定理及状态反馈控制系统的设计方法; (2 )比较输出反馈与状态反馈的优缺点; (3 )训练Matlab程序设计能力。 实验内容: (1 )针对一个二阶系统,分别设计输出反馈和状态反馈控制器;(2 )分别测出两种情况下系统的阶跃响应; (3 )对实验结果进行对比分析。 二、实验设备 装有MATLAB的PC机一台 三、实验原理 一个控制系统的性能是否满足要求,要通过解的特征来评价,也就是说当传递函数是有理函数时,它的全部信息几乎都集中表现为它的极点、零点及传递函数。因此若被控系统完全能控,则可以通过状态反馈任意配置极点,使被控系统达到期望的时域性能指标。
闭环系统性能与闭环极点(特征值)密切相关,在状态空间的分析和综合中,除了利用输出反馈以外,主要利用状态反馈来配置极点,它能提供更多的校正信息。 (一) 利用状态反馈任意配置闭环极点的充要条件是:受控系统可控。 设SIMO (Single Input-Multi Output )受控系统的动态方程为 状态向量x 通过状态反馈矩阵k ,负反馈至系统参考输入v ,于是有 这样便构成了状态反馈系统,其结构图如图1-1所示 图1-1 SIMO 状态反馈系统结构图 状态反馈系统动态方程为 闭环系统特征多项式为 ()()f I A bk λλ=-+ (1-2) 设闭环系统的期望极点为1λ,2λ,…,n λ,则系统的期望特征多项式x b v u 1s C A k -y x &
反馈控制系统: 同开环控制系统相比,闭环控制具有一系列优点。但反馈回路的引入增加了系统的复杂性,而且增益选择不当时会引起系统的不稳定。为提高控制精度,在扰动变量可以测量时,也常同时采用按扰动的控制(即前馈控制)作为反馈控制的补充而构成复合控制系统。 反馈控制系统(即闭环控制系统)是基于反馈原理建立的自动控制系统。所谓反馈原理,就是根据系统输出变化的信息来进行控制,即通过比较系统行为(输出)与期望行为之间的偏差,并消除偏差以获得预期的系统性能。在反馈控制系统中,既存在由输入到输出的信号前向通路,也包含从输出端到输入端的信号反馈通路,两者组成一个闭合的回路。因此,反馈控制系统又称为闭环控制系统。反馈控制是自动控制的主要形式。在工程上常把在运行中使输出量和期望值保持一致的反馈控制系统称为自动调节系统,而把用来精确地跟随或复现某种过程的反馈控制系统称为伺服系统或随动系统。 反馈控制系统由控制器、受控对象和反馈通路组成(见图)。图中带叉号的圆圈为比较环节,用来将输入与输出相减,给出偏差信号。这一环节在具体系统中可能与控制器一起统称为调节器。以炉温控制为例,受控对象为炉子;输出变量为实际的炉子温度;输入变量为给定常值温度,一般用电压表示。炉温用热电偶测量,代表炉温的热电动势与给定电压相比较,两者的差值电压经过功率放大后用来驱动相应的执行机构进行控制。 反馈控制系统包括: (一)负反馈(negative feedback):凡反馈信息的作用与控制信息的作用方向相反,对控制部分的活动起制约或纠正作用的,称为负反馈。即使系统的输出值与目标值的偏差越来越小。
1. 意义:维持稳态 2. 缺点:滞后、波动 (二)正反馈(positive feedback ):凡反馈信息的作用与控制信息的作用方向相同,对控制部分的活动起增强作用的,称为正反馈意义:加速生理过程,使机体活动发挥最大效应。即使系统的输出值与目标值的偏差越来越大,正反馈并不是都是好的,有的时候系统需要正反馈的作用。如原子弹引爆装置中要用到的裂变链式反应。又如在植物保护中,为了消灭有害的昆虫,大量繁殖这种害虫的天敌。反馈控制系统由控制器、受控对象和反馈通路组成。在反馈控制系统中,不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。因此,它具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性 反馈控制图解 反馈控制: 管理人员分析以前的工作的执行结果,将它与控制标准相比较,发现偏差所在并找出原因,拟定纠正措施以防止偏差发展或继续存在,就是反馈控制 反馈控制效果 反馈控制是指将系统的输出信息返送到输入端,与输入信息进行比较,并利用二者的偏差进行控制的过程。反馈控制其实是用过去的情况来指导现在和将来。在控制系统中,如果返回的信息的作用是抵消输入信息,称为负反馈,负反馈可以使系统趋于稳定;若其作用是增强输入信息,则称为正反馈,正反馈可以使信号得到加强。
生理学属于医学基础知识需要掌握的内容,中公卫生人才招聘考试网帮助大家梳理知识-反馈控制系统。 反馈控制系统是一个闭环系统,其控制部分不断接受受控部分的影响,即受控部分不断有反馈信息返回输给控制部分,改变着它的活动。这种控制系统具有自动控制的能力。 图1-1是反馈控制系统的模式图。图中把该系统分成比较器、控制系统、受控系统三个环节;输出变量的部分信息经监测装置检测后转变为反馈信息,回输到比较器,由此构成闭合回路。在不同的反馈控制系统中,传递信息的方式是多种多样的,可以是电信号(神经冲动)、化学信号或机械信号,但最重要的是这些信号的数量和强度的变化中所包含的准确的和足够的信息。参考信息即输入信息(Si),它和反馈信息(Sf)比较后,即得出偏差信息(Se)。三者的关系为:Se=Si+Sf如果是负反馈,则Sf为负值;如果是正反馈,则Sf为正值。 图1-1反馈控制系统模式图 在负反馈情况时,反馈控制系统平时处于稳定状态。如出现一个干扰信息(Sd)作用于受控系统,则输出变量发生改变,导致该反馈控制系统发生扰乱;这时反馈信息与参考信息发生偏差,偏差信息作用于控制系统使控制信息(Sc)发生改变,以对抗干扰信息的干扰作用,使输出变量尽可能恢复到扰乱前的水平。例如,人体的体温经常可稳定在37°C左右,就是负反馈调控作用的结果。现在认为下丘脑内有决定体温水平的调定点的神经元,这些神经元发出参考信息使体温调节中枢发出控制信息来调节产热和散热过程,保持体温维持在37°C左右。如果人体进行剧烈运动,产热突然增加(即发生干扰信息,使输出变量增加)体温随着升高,则下丘脑内的温度敏感(监测装置)就发生反馈信息与参考信息进行比较,由此产生偏差信息作用于体温调节中枢,从而改变控制信息来调整产热和散热过程,使升高的体温回降,恢复到场37°C左右。 例题: 下列生理过程中,属于负反馈调节的是 A.血液凝固 B.压力感受性反射 C.分娩 D.排尿反射 E.排便反射
反馈控制系统的数学模型及设计工具 反馈系统的数学模型在系统分析和设计中起着很重要的作用,基于系统的数学模型,就可以用比较系统的方法对之进行分析,同时,一些系统的方法也是基于数学模型的,这就使得控制系统的模型问题显得十分重要。 1数学模型的表示方法 线性时不变(LTI)系统模型包括传递函数模型( tf ),零极点增益模型( zpk ),状态空间模型( ss )和频率响应数据模型 ( frd ) 1.1 传递函数模型 线性系统的传递函数模型可以表示成复数变量s 的有理函数式: n n n n n m m m m a s a s a s a s b s b s b s b s G +++++++++=---+-122111121)( 调用格式: G =tf (num, den) 其中][num 121+=m m b b b b ,]1[den 121n n a a a a -= 分别是传递函数分子和分母多项式的系数向量,按照s 的降幂排列.返回值G 是一个tf 对象,该对象包含了传递函数的分子和分母信息。 例1 一个传递函数模型 5 43232)(2342++++++=s s s s s s s G 可以由下面命令输入到MATLAB 工作空间去. >> num=[1 2 3];den=[1 2 3 4 5];G=tf(num,den) Transfer function: s^2 + 2 s + 3 ---------------------------------- s^4 + 2 s^3 + 3 s^2 + 4 s + 5 对于传递函数的分母或分子有多项式相乘的情况, MATLAB 提供了求两个向量的卷积函数—conv( )函数求多项式相乘来解决分母或分子多项式的输入。conv( )函数允许任意地多层嵌套,从而表示复杂的计算.应该注意括号要匹配,否则会得出错误的信息与结果。 例2 一个较复杂传递函数模型 ) 432)(6()1()3)(2(2)(2342+++++++=s s s s s s s s G 该传递函数模型可以通过下面的语句输入到MATLAB 工作空间去。 >> num=2*conv([1 2],[1 3]); den=conv(conv(conv([1 1],[1 1]),[1 6]),[1 2 3 4]);
反馈控制系统简介 摘要:反馈控制系统属于人们通常所说的自动控制系统中的一个分支。所谓自动控制,是指在没有人直接参与的情况下,利用外加的设备或生产过程的某个工作状态或参数自动的按照预定的规律运行。这些外加的设备或装置称为自动控制装置,它们和控制对象一起形成自动控制系统。例如,船舶机舱的辅锅炉自动控制,分油机自动控制,起货机自动控制和柴油机遥控等都是自动控制技术在船上的典型应用。 关键词:反馈自动控制系统 一反馈控制系统的组成 一个反馈控制系统必须有四个最基本的环节,即控制对象、测量单元、调节单元和执行机构。控制对象是指所要控制的机器,设备或装置,而所要控制的运行参数则称为被控量。控制对象也可称为被控对象。测量单元的作用是,检查被控量的实际值,并把它转换成统一的标准信号,该信号称为被控量的测量值。在气动控制系统中,对应被控量的满量程,其统一的标准气压信号是0.02-0.1MPa;在电动控制系统中,对应被控量的满量程,其统一的标准气压信号是4-20mA或0-10mA,使用4-20mA居多。测量单元一般包括两部分,即传感器和变送器,传感器用于对物理量进行检测,变送器则将传感器的输出转换为调节器能够接受的信号。调节单元是指具有某种调节作用规律的调节器。调节器接受测量单元送来的被控量测量值,并与被控量的希望值相比较得到偏差信号,再根据偏差信号的大小和方向,按照某种调节作用规律输出一个控制信号,送给执行机构,对被控量施加控制作用,直到偏差等于零或接近零为止。执行机构接受调节单元输出的控制信号,并将该信号转换为作用到控制对象的实际控制作用。调节单元输出的控制信号一般都要经过执行机构才能作用到控制对象上,从改变流入控制对象的物质或能量流量,使之能适应控制对象的负荷变化。在气动控制系统中,执行机构一般是气动薄膜调节阀或气动活塞式调节阀;在电动控制系统中,一般采用伺服电机。 二反馈控制系统的工作过程 设系统处于平衡状态时突然受到一个外部扰动,被控量将离开初始稳定值发生变化,测量单元将把被控量的实际值送至调节器,在调节器内部,被控量的给定值与测量值进行比较,得到偏差值e,调节器依据偏差值的大小和方向按照某种调节作用规律输出一个控制信号,通过执行机构改变流入控制对象的物质或能量流量,被控量朝着偏差减小的方向变化,这一信号又通过测量单元送至调节器,重复上述过程,最终使被控量又回到给定值或给定值附近,系统达到一个新的平衡状态。当改变给定值时,系统的工作与上述过程类似。 三控制系统的典型输入信号 1.阶跃输入函数 2.速度输入函数 3.脉冲输入函数 4.正弦输入函数 参考文献 [1]林叶锦.轮机自动化.大连:大连海事大学出版社,2009