(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910176664.6
(22)申请日 2019.03.08
(71)申请人 芋头科技(杭州)有限公司
地址 310000 浙江省杭州市余杭区五常街
道西溪艺术集合村莲公荡路10号101
室
(72)发明人 吕诚 霍志宇
(74)专利代理机构 北京中原华和知识产权代理
有限责任公司 11019
代理人 孙磊 寿宁
(51)Int.Cl.
H04W 4/02(2018.01)
H04W 4/024(2018.01)
H04W 64/00(2009.01)
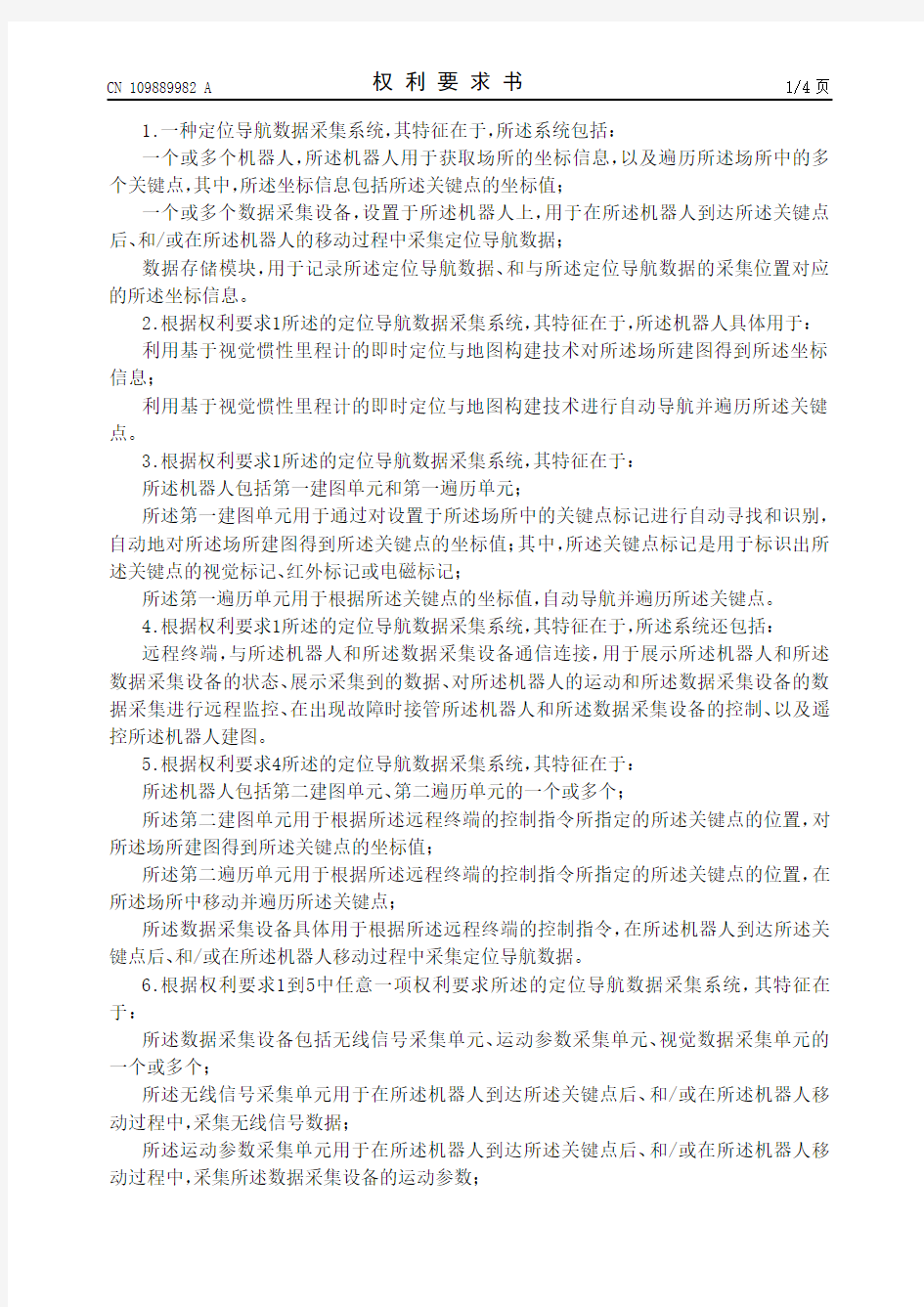
(54)发明名称定位导航数据采集系统及方法(57)摘要本发明涉及一种定位导航数据采集系统及方法,该系统包括:一个或多个机器人,所述机器人用于获取场所的坐标信息,以及遍历所述场所中的多个关键点,其中,所述坐标信息包括所述关键点的坐标值;一个或多个数据采集设备,设置于所述机器人上,用于在所述机器人到达所述关键点后、和/或在所述机器人移动过程中采集定位导航数据;数据存储模块,用于记录所述定位导航数据、和与所述定位导航数据的采集位置对应的所述坐标信息。利用本发明的定位导航数据采集系统及方法,实现了自动采集数据,能够极大地节省数据采集的时间和成本、提高效率,
并能够大规模推广。权利要求书4页 说明书17页 附图4页CN 109889982 A 2019.06.14
C N 109889982
A
权 利 要 求 书1/4页CN 109889982 A
1.一种定位导航数据采集系统,其特征在于,所述系统包括:
一个或多个机器人,所述机器人用于获取场所的坐标信息,以及遍历所述场所中的多个关键点,其中,所述坐标信息包括所述关键点的坐标值;
一个或多个数据采集设备,设置于所述机器人上,用于在所述机器人到达所述关键点后、和/或在所述机器人的移动过程中采集定位导航数据;
数据存储模块,用于记录所述定位导航数据、和与所述定位导航数据的采集位置对应的所述坐标信息。
2.根据权利要求1所述的定位导航数据采集系统,其特征在于,所述机器人具体用于:
利用基于视觉惯性里程计的即时定位与地图构建技术对所述场所建图得到所述坐标信息;
利用基于视觉惯性里程计的即时定位与地图构建技术进行自动导航并遍历所述关键点。
3.根据权利要求1所述的定位导航数据采集系统,其特征在于:
所述机器人包括第一建图单元和第一遍历单元;
所述第一建图单元用于通过对设置于所述场所中的关键点标记进行自动寻找和识别,自动地对所述场所建图得到所述关键点的坐标值;其中,所述关键点标记是用于标识出所述关键点的视觉标记、红外标记或电磁标记;
所述第一遍历单元用于根据所述关键点的坐标值,自动导航并遍历所述关键点。
4.根据权利要求1所述的定位导航数据采集系统,其特征在于,所述系统还包括:
远程终端,与所述机器人和所述数据采集设备通信连接,用于展示所述机器人和所述数据采集设备的状态、展示采集到的数据、对所述机器人的运动和所述数据采集设备的数据采集进行远程监控、在出现故障时接管所述机器人和所述数据采集设备的控制、以及遥控所述机器人建图。
5.根据权利要求4所述的定位导航数据采集系统,其特征在于:
所述机器人包括第二建图单元、第二遍历单元的一个或多个;
所述第二建图单元用于根据所述远程终端的控制指令所指定的所述关键点的位置,对所述场所建图得到所述关键点的坐标值;
所述第二遍历单元用于根据所述远程终端的控制指令所指定的所述关键点的位置,在所述场所中移动并遍历所述关键点;
所述数据采集设备具体用于根据所述远程终端的控制指令,在所述机器人到达所述关键点后、和/或在所述机器人移动过程中采集定位导航数据。
6.根据权利要求1到5中任意一项权利要求所述的定位导航数据采集系统,其特征在于:
所述数据采集设备包括无线信号采集单元、运动参数采集单元、视觉数据采集单元的一个或多个;
所述无线信号采集单元用于在所述机器人到达所述关键点后、和/或在所述机器人移动过程中,采集无线信号数据;
所述运动参数采集单元用于在所述机器人到达所述关键点后、和/或在所述机器人移动过程中,采集所述数据采集设备的运动参数;
2