
案例3 平面连杆机构优化设计
一、问题描述
平面连杆机构是由所有构件均由低副连接而成的机构,四杆机构是最常用的平面连杆机构。一般情况下,四杆机构只能近似实现给定的运动规律或运动轨迹,精确设计较为复杂。在四杆机构中,若两连架杆中的一个是曲柄,另一个是摇杆,则该机构为曲柄摇杆机构。曲柄摇杆机构可将曲柄的连续转动转变为摇杆的往复摆动。
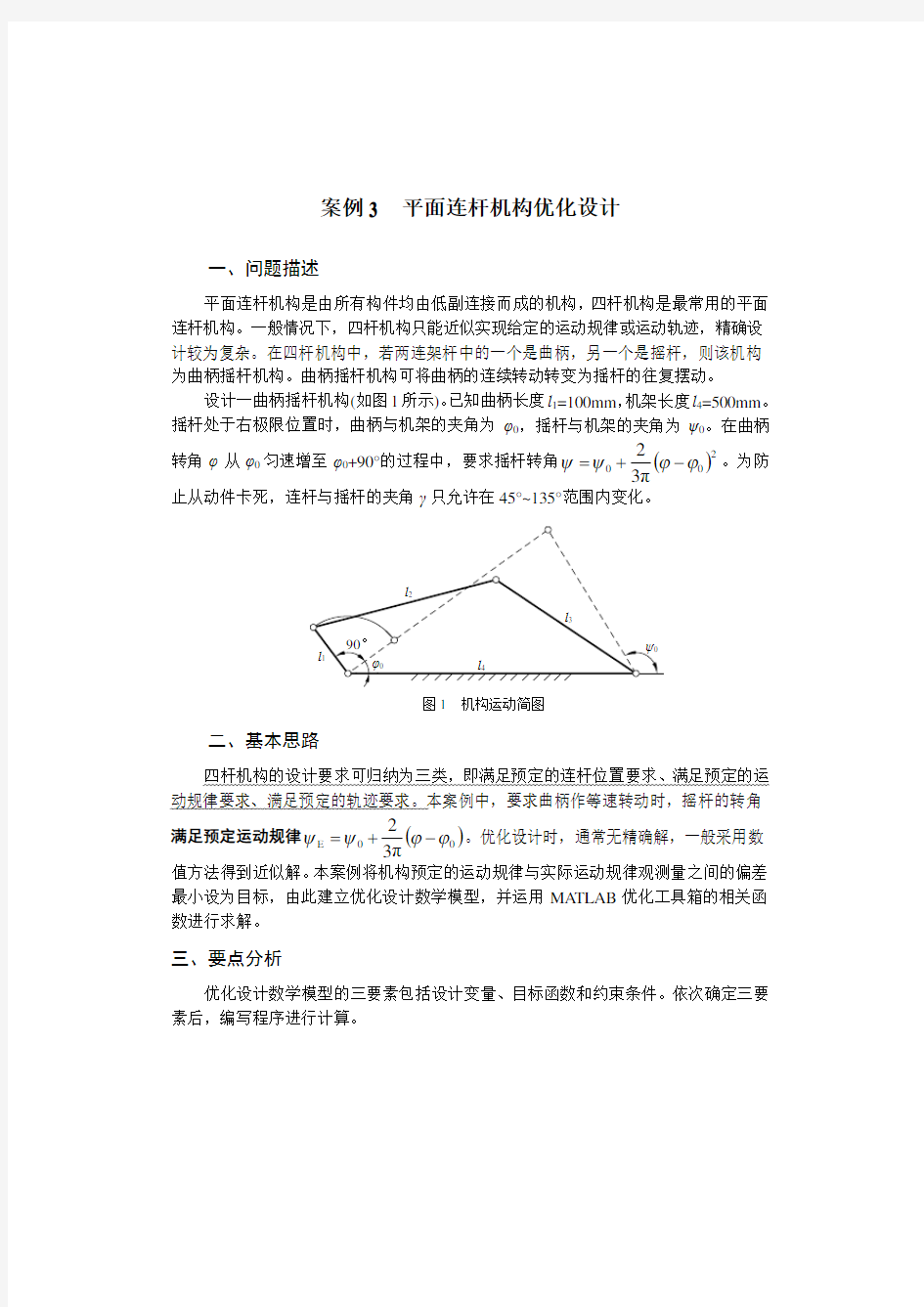
设计一曲柄摇杆机构(如图1所示)。已知曲柄长度l 1=100mm ,机架长度l 4=500mm 。摇杆处于右极限位置时,曲柄与机架的夹角为φ0,摇杆与机架的夹角为ψ0。在曲柄转角φ从φ0匀速增至φ0+90°的过程中,要求摇杆转角()200π
32
??ψψ-+
=。为防止从动件卡死,连杆与摇杆的夹角γ只允许在45°~135°范围内变化。
图1 机构运动简图
二、基本思路
四杆机构的设计要求可归纳为三类,即满足预定的连杆位置要求、满足预定的运动规律要求、满足预定的轨迹要求。本案例中,要求曲柄作等速转动时,摇杆的转角满足预定运动规律()00E π
32
??ψψ-+
=。优化设计时,通常无精确解,一般采用数值方法得到近似解。本案例将机构预定的运动规律与实际运动规律观测量之间的偏差最小设为目标,由此建立优化设计数学模型,并运用MA TLAB 优化工具箱的相关函数进行求解。
三、要点分析
优化设计数学模型的三要素包括设计变量、目标函数和约束条件。依次确定三要素后,编写程序进行计算。
1.设计变量的确定
通常将机构中的各杆长度,以及摇杆按预定运动规律运动时,曲柄所处的初始位置角φ0列为设计变量,即
T 04321T 54321)()(?l l l l x x x x x ==X (1)
考虑到机构各杆长按比例变化时,不会改变其运动规律,因此在计算可取l 1为单位长度,而其他杆长则按比例取为l 1的倍数。若曲柄的初始位置对应摇杆的右极限位置,则φ0及ψ0均为杆长的函数,即
4
212
32
42210)(2)(cos arc l l l l l l l +-++=? (2)
4
32
32
422102)(cos arc l l l l l l --+=ψ (3)
因此,设计变量缩减为3个独立变量,即
T 432T 321)()(l l l x x x ==X (4)
2.目标函数的建立
以机构预定的运动规律观测量ψE i 与实际运动规律观测量ψi 之间的偏差平方和最小为指标来建立目标函数,即
min )()(1
2E →-=∑=m
i i i f ψψX (5)
式中,m 为输入角的等分数;ψE i 为预期输出角,ψE i=ψE (φi );ψi 为实际输出角。由图2可知:
?
?
?<≤+-<≤--=)π2π(π)
π0(πi i i i i i i ?βα?βαψ (6) 32
22322arccos l l l i i i ρρα-+= (7)
42
12422arccos l l l i i i ρρβ-+= (8)
i i l l l l ?ρcos 2412421-+= (9)
(a) 0≤φi <π (b) π≤φi <2π
图2 曲柄摇杆机构的运动学关系
3. 约束条件的确定
(1) 曲柄摇杆机构应满足曲柄存在条件,可得
0)(211≤-=l l g X (10)
0)(312≤-=l l g X (11) 0)(413≤-=l l g X (12) 0)(32414≤--+=l l l l g X (13) 0)(43215≤--+=l l l l g X (14) 0)(42316≤--+=l l l l g X (15)
(2) 连杆与摇杆的夹角应在γmin 和γmax 之间,即
02)(arccos )(max 3
22
4232
271≤-+-+=γl l l l l l g X (16)
02)(arccos )(3
22
12322min 84≤--+-=l l l l l l g γX (17)
四、具体步骤
1. 选择设计变量
已知l 1=100mm ,l 4=500mm ,且φ0和ψ0不是独立参数,它们可由下式(2)、式(3)求出,即
)100(1000250000)100(cos
arc 22
3220l l l +-++=? 3
2
32201000250000)100(cos
arc l l l --+=ψ
所以该问题只有两个独立参数l 2和l 3,故设计向量为
T
32T 21)()(l l x x ==X 2. 建立目标函数
将输入角分成30等分,并依次取30个观测点ψ1, ψ2, ..., ψ30,得目标函数
∑=-=30
1
2E )()(i i i f ψψX
式中:i i i βαψ--=π
2
2
12
2232223222arccos x r x x r l r l l r i i i i i -+=
-+=α i i i i i r r l r l l r 1000240000
arccos
2arccos 24212
42+=-+=β i
i i l l l l r ??cos 100000260000cos 2412
421-=-+=
()200E π
32
??ψψ-+
=i i 3. 确定约束条件
约束函数按曲柄存在条件及对传动角的限制来建立,得
0100)(11≤-=x g X 0100)(22≤-=x g X
0600)(213≤--=x x g X
0400)(214≤--=x x g X
0400)(125≤--=x x g X
0160000414.1)(212
2216≤--+=x x x x g X
0414.1360000)(2122217≤---=x x x x g X 4. MATLAB 程序及优化结果
这是一个具有2个设计变量、7个不等式约束条件的优化设计问题。应用MATLAB
软件的优化工具箱的fmincon 函数对上述优化问题求解。 (1) 编写m 文件Objfun.m 定义目标函数。
function f=objfun(x) l1=100; l4=500;
th0=acos(((100+x(1))^2-x(2)^2+250000)/(1000*(100+x(1)))); ps0=acos(((100+x(1))^2-x(2)^2-250000)/(1000*x(2))); f=0;
for th=th0:pi/2/30:th0+pi/2
r=(10000+250000-2*100*500*cos(th))^0.5; a=acos((r^2+x(2)^2-x(1)^2)/(2*r*x(2))); b=acos((r^2+240000)/(1000*r)); ps=pi-a-b ;
pse=ps0+2/(3*pi)*(th-th0)^2; f=f+(ps-pse)^2;
end
(2) 编写m 文件confun.m 定义约束。
function [c ,ceq]=confun(x) c(1)=100-x(1); c(2)=100-x(2); c(3)= 600-x(1)-x(2); c(4)= x(1)-x(2)-400; c(5)= x(2)-x(1)-400;
c(6)= x(1)^2+x(2)^2-1.414*x(1)*x(2)-160000; c(7)= 360000-x(1)^2-x(2)^2-1.414*x(1)*x(2); ceq=[];
(3) 编写m 文件run.m 求解计算。
x0=[400 400];
options=optimset('LargeScale','off');
[x,fval]=fmincon(@objfun,x0,[],[],[],[],[],[],@confun)
(4) 运行m文件run.m,得最优解X*=(412.8926mm, 232.2417mm),f(X *)=0.0076 mm2。
五、问题拓展
满足预定运动轨迹的优化设计,要求机构在运行过程中,连杆上的某点(分析点)尽可能沿着给定的曲线运动。设计时,连杆分析点坐标可由机构杆长和夹角表示。以分析点的预定轨迹观测点坐标值与实际轨迹观测点坐标值之间的偏差平和最小为指标来建立目标函数,并列出传动角要求、曲柄存在条件以及杆长尺寸限制等约束条件。
机械优化设计在matlab中的应用 东南大学机械工程学院** 一优化设计目的: 在生活和工作中,人们对于同一个问题往往会提出多个解决方案,并通过各方面的论证从中提取最佳方案。最优化方法就是专门研究如何从多个方案中科学合理地提取出最佳方案的科学。由于优化问题无所不在,目前最优化方法的应用和研究已经深入到了生产和科研的各个领域,如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等,并取得了显著的经济效益和社会效益。 二优化设计步骤: 1.机械优化设计的全过程一般可以分为如下几个步骤: 1)建立优化设计的数学模型; ' 2)选择适当的优化方法; 3)编写计算机程序; 4)准备必要的初始数据并伤及计算; 5)对计算机求得的结果进行必要的分析。 其中建立优化设计数学模型是首要的和关键的一步,它是取得正确结果的前提。优化方法的选取取决于数学模型的特点,例如优化问题规模的大小,目标函数和约束函数的性态以及计算精度等。在比较各种可供选用的优化方法时,需要考虑的一个重要因素是计算机执行这些程序所花费的时间和费用,也即计算效率。 2.建立数学模型的基本原则与步骤 ①设计变量的确定; 设计变量是指在优化设计的过程中,不断进行修改,调整,一直处于变化的参数称为设计变量。设计变量的全体实际上是一组变量,可用一个列向量表示: - x=。 ②目标函数的建立; 选择目标函数是整个优化设计过程中最重要的决策之一。当对某以设计性能有特定的要求,而这个要求有很难满足时,则针对这一性能进行优化会得到满意的效果。目标函数是设计变量的函数,是一项设计所追求的指标的数学反映,因此它能够用来评价设计的优劣。 目标函数的一般表达式为: f(x)=,要根据实际的设计要求来设计目标函数。 ③约束条件的确定。 一个可行性设计必须满足某些设计限制条件,这些限制条件称为约束条件,简称约束。 由若干个约束条件构成目标函数的可行域,而可行域内的所有设计点都是满足设计要求的,一般情况下,其设计可行域可表示为 …
第八章平面连杆机构及其设计 一、填空题: 1.平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 2.在铰链四杆机构中,运动副全部是低副。 3.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 4.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 5.在铰链四杆机构中,与连架杆相连的构件称为连杆。 6.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 7.对心曲柄滑块机构无急回特性。 8.平行四边形机构的极位夹角θ=00,行程速比系数K= 1 。 9.对于原动件作匀速定轴转动,从动件相对机架作往复直线运动的连杆机构,是否有急回 特性,取决于机构的极位夹角是否为零。 10.机构处于死点时,其传动角等于0?。 11.在摆动导杆机构中,若以曲柄为原动件,该机构的压力角α=00。 12.曲柄滑块机构,当以滑块为原动件时,可能存在死点。 13.组成平面连杆机构至少需要 4 个构件。 二、判断题: 14.平面连杆机构中,至少有一个连杆。(√) 15.在曲柄滑块机构中,只要以滑块为原动件,机构必然存在死点。(√) 16.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 17.有死点的机构不能产生运动。(×) 18.曲柄摇杆机构中,曲柄为最短杆。(√) 19.双曲柄机构中,曲柄一定是最短杆。(×) 20.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 21.在摆动导杆机构中,若以曲柄为原动件,则机构的极位夹角与导杆的最大摆角相等。 (√) 22.机构运转时,压力角是变化的。(√) 三、选择题:
23.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A ≤ B ≥ C > 24.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而 充分条件是取 A 为机架。 A 最短杆或最短杆相邻边 B 最长杆 C 最短杆的对边。 25.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时, 有两个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 26.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 A 为机架时, 有一个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 27.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 C 为机架时, 无曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 28.铰链四杆机构中,若最短杆与最长杆长度之和 B 其余两杆长度之和,就一定是双摇杆 机构。 A < B > C = 29.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 C 为原动件时,此时机构处在死点位 置。 A 曲柄 B 连杆 C 摇杆 30.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 A 为原动件时,此时为机构的极限 位置。 A 曲柄 B 连杆 C 摇杆 31.对曲柄摇杆机构,当以曲柄为原动件且极位夹角θ B 时,机构就具有急回特性。 A <0 B >0 C =0 32.对曲柄摇杆机构,当以曲柄为原动件且行程速度变化系数K B 时,机构就具有急 回特性。 A <1 B >1 C =1 33.在死点位置时,机构的压力角α= C 。 A 0 o B 45o C 90o 34.若以 B 为目的,死点位置是一个缺陷,应设法通过。 A 夹紧和增力B传动 35.若以 A 为目的,则机构的死点位置可以加以利用。 A 夹紧和增力;B传动。
实现预定轨迹的平面四连杆机构的优化设计 汕头大学工学院 09机电系citycars 摘 要: 四连杆机构是工程上广泛应用的传动机构,按照预定的轨迹曲线设计平面连杆机构,就是要确定机构的各尺寸参数和连杆上的描点位置,使该点所描的连杆曲线与预定的轨迹相符。利用软件Matlab 优化工具箱进行优化设计,使得实际运动轨迹与预定的轨迹误差最小,得到最优的连杆参数。 关键词:平面四连杆机构 预定轨迹 优化设计 For achieving the orbit of the plane four bar linkage of optimization design Abstract : Four bar linkage is widely used in engineering transmission mechanism, according to the predetermined path curve planar linkage mechanism design is to determine the size of the agency and the parameters of the tracing points, and make the point of link curve and draw a path consistent. Use of software Matlab optimal toolbox for optimum design, make the actual trajectory and scheduled path error smallest, the optimal parameters of the connecting rod. Key words: Plane four bar linkage Scheduled path Optimization design 1 问题描述 设计一平面四连杆机构,如图1所示。要求曲柄在运动过程中实现运动轨迹x y 2= ,52< 1 图11所示铰链四杆机构中,已知各杆长度AB l =42mm ,BC l =78mm ,CD l =75mm ,AD l =108mm 。要求 (1) 试确定该机构为何种机构; (2) 若以构件AB 为原动件,试用作图法求出摇杆CD 的最大摆角?, 此机构的极位夹角θ,并确定行程速比系数K (3) 若以构件AB 为原动件,试用作图法求出该机构的最小传动角 min γ; (4) 试分析此机构有无死点位置。 图11 【分析】(1)是一道根据机构中给定的各杆长度(或尺寸范围)来确定属于何种铰链四杆机构问题;(2)(3)(4)是根据机构中给定的各杆长度判定机构有无急回特性和死点位置,确定行程速比系数K 和最小传动角问题。 解: (1)由已知条件知最短杆为AB 连架杆,最长杆为AD 杆,因 mm l l mm l l CD BC AD AB 153757815010842=+=+<=+=+ 故AB 杆为曲柄,此机构为曲柄摇杆机构。 (2)当原动件曲柄AB 与连杆BC 两次共线时,摇杆CD 处于两极限位置。 适当选取长度比例尺l μ,作出摇杆CD 处于两极限位置时的机构位置图AB 1C 1D 和AB 2C 2D ,由图中量得?=70°,θ=16°,可求得 19.1180180≈+?-?= K θ θ (3) 当原动件曲柄AB 与机架AD 两次共线时,是最小传动角min γ可能出现的位置。用作图法作出机构的这两个位置AB ′C ′ D 和AB ″C ″ D ,由图中量得,50,27?=''?='γγ故 min γ=?='27γ (4) 若以曲柄AB 为原动件,机构不存在连杆BC 与从动件CD 共线的两个位置,即不存在?='0γ的位置,故机构无死点位置;若以摇杆CD 为原动件,机构存在连杆BC 与从动件AB 共线的两个位置,即存在?='0γ的位置,故机构存在两个死点位置。 【评注】 四杆机构基本知识方面的几个概念(如有曲柄条件、急回运动、传动角等)必须清晰。机构急回运动分析的关键是确定极位夹角θ的大小,本题曲柄合理转向的确定依据就是机构存在慢进快退的急回特性;而传动角和死点的分析要特别注意它与机构原动件有关。 2 如图12所示,连杆BC 的长度BC l 及其两个位置11C B 、22C B 为已知,试设计一铰链四杆机构ABCD ,使得AB 杆为原 动件时,机构在此位置时的传动角相等,并满足机架AD 的长度为AD l 。 平面连杆机构优化设计 一、问题描述 平面连杆机构是由所有构件均由低副连接而成的机构,四杆机构是最常用的平面连杆机构。一般情况下,四杆机构只能近似实现给定的运动规律或运动轨迹,精确设计较为复杂。在四杆机构中,若两连架杆中的一个是曲柄,另一个是摇杆,则该机构为曲柄摇杆机构。曲柄摇杆机构可将曲柄的连续转动转变为摇杆的往复摆动。 设计一曲柄摇杆机构(如图1所示)。已知曲柄长度l 1=100mm ,机架长度l 4=500mm 。摇杆处于右极限位置时,曲柄与机架的夹角为φ0,摇杆与机架的夹角为ψ0。在曲柄转角φ从φ0匀速增至φ0+90°的过程中,要求摇杆转角()200π 32 ??ψψ-+ =。为防止从动件卡死,连杆与摇杆的夹角γ只允许在45°~135°范围内变化。 图1 机构运动简图 二、基本思路 四杆机构的设计要求可归纳为三类,即满足预定的连杆位置要求、满足预定的运动规律要求、满足预定的轨迹要求。本案例中,要求曲柄作等速转动时,摇杆的转角满足预定运动规律()00E π 32 ??ψψ-+ =。优化设计时,通常无精确解,一般采用数值方法得到近似解。本案例将机构预定的运动规律与实际运动规律观测量之间的偏差最小设为目标,由此建立优化设计数学模型,并运用MATLAB 优化工具箱的相关函数进行求解。 三、要点分析 优化设计数学模型的三要素包括设计变量、目标函数和约束条件。依次确定三要素后,编写程序进行计算。 1.设计变量的确定 通常将机构中的各杆长度,以及摇杆按预定运动规律运动时,曲柄所处的初始位置角φ0列为设计变量,即 T 04321T 54321)()(?l l l l x x x x x ==X (1) 考虑到机构各杆长按比例变化时,不会改变其运动规律,因此在计算可取l 1为单位长度,而其他杆长则按比例取为l 1的倍数。若曲柄的初始位置对应摇杆的右极限位置,则φ0及ψ0均为杆长的函数,即 4 212 32 42210)(2)(cos arc l l l l l l l +-++=?(2) 实现预定轨迹的平面四连杆机构的 数学建模及其优化设计 一.问题描述 设计一平面四连杆机构,如图1所示。要求曲柄在运动过程中实现运动轨迹 x y 2=,52< 为寻优目标,其偏差为i Mi i x x x -=?和i Mi i y y y -=?()n x i ,,2,1???=,如图2。为此,把摇杆运动区间2到5分成S 等分,M 点坐标有相应分点与之对应。将各分点标号记作i ,根据均方根差可建立其目标函数,即 ()()() [ ] min 2 /122 →-+-=∑i Mi i Mi y y x x X f ?sin 3L y Mi = ?cos 33?+=L x Mi i i x y ?=2 )1(3 1-+=i s x i ,S 为运动区间的分段数 ?? ??????--+=432 4 232212)(arccos L L L L L L ? 于是由以上表达式便构成了一个目标函数的数学表达式,对应于每一个机构设计方案(即给定21,X X ),即可计算出均方根差()X f 。 图 2 3.确定约束条件 根据设计条件,该机构的约束条件有两个方面:一是传递运动过程中的最小传动角γ应大于50度;二是保证四杆机构满足曲柄存在的条件。以此为基础建立优化线束条件。 ①保证传动角 50>γ 第三章平面连杆机构 平面连杆机构是由若干构件和低副组成的平面机构,又称平面低副机构。这种机构可以实现预期的运动规律及位置、轨迹等要求。平面连杆机构用于各种机械中,常与机器的工作部分相连,起执行和控制的作用,在工程实际中应用十分广泛。平面连杆机构的主要优点有:1、低副为面接触,所以压强小,易润滑,磨损少,可以承受较大的载荷。2、构件结构简单,便于加工,构件之间的接触是由构件本身的几何约束来保持的,故工作可靠。3、在原动件等速连续运动的条件下,当各构件的相对长度不同时,可使从动件实现多种形式的运动,满足多种运动规律的要求。其主要的缺点有:1、运动副中存在间隙,当构件数目较多时,从动件的运动累计误差较大。2、不容易精确地实现复杂的运动规律,机构设计相对复杂。3、连杆机构运动时产生的惯性力难以平衡,所以不适用于高速场合。 平面连杆机构是常用的低副机构,其中以由四个构件组成的平面四杆机构应用最广泛,而且是组成多杆机构的基础。因此本章着重讨论平面四杆机构的基本形式及在实际中的应用,理解四杆机构的运动特性及设计平面四杆机构的基本设计方法。 3.1 平面连杆机构及其应用 连杆机构有平面连杆机构和空间连杆机构。其中,若各运动构件均在相互平行的平面内运动,则称为平面连杆机构。若各运动构件不都在相互平行的平面内运动,则称为空间连杆机构。平面连杆机构较空间连杆机构应用更为广泛,在平面连杆机构中,结构最简单的且应用最广泛的是由四个构件所组成的平面四杆机构,其它多杆机构可看成在此基础上依次增加杆件而组成。故本章着重介绍平面四杆连杆机构。 3.1.1铰链四杆机构的类型 所有运动副均为转动副的四杆机构称为铰链四杆机构。它是平面四杆机构的基本形式。如图3-1所示。图中固定不动的构件AD是机架;与机架相连的构件AB、CD称为连架杆;不与机架直接相连的构件BC称为连杆。连架杆中,能作整周回转的构件称为曲柄,只能作往复摆动的构件称为摇杆。 图3-1 铰链四杆机构 根据两连架杆中曲柄(或摇杆)的数目,铰链四杆机构可分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本形式。 平面连杆机构的优化设计 【教学目标】 1.了解连杆机构优化设计的一般步骤 2.掌握连杆机构优化设计的方法 【教学重点】 1.掌握连杆机构优化设计的方法 【教学难点】 1.掌握连杆机构优化设计的方法 【教学准备】 多媒体课件、直尺、圆规。 【教学过程】 一、以工程实际案例引入课题 实例1:飞机起落架(结合最近美国波音飞机频繁失事的新闻) 实例2:汽车雨刮器 说明:平面连杆机构的实用在生产生活中随处可见,是机械设计当中常见的一种机构。 二、定义回顾 【提问】平面四杆机构的基本形式有哪些? 【预设】机械原理是本科第四学期的课程,学生可能记不全,要引导性地带大家回忆。 【答案】曲柄摇杆机构、双曲柄机构、双摇杆机构 三、回顾以前所学习的连杆机构设计方法,对比引入优化设计。 新课教授 一、曲柄摇杆机构再现已知运动规律的优化设计 1.设计变量的确定 决定机构尺寸的各杆长度,以及当摇杆按已知运动规律开始运动时,曲柄所处的位置角φ0 为设计变量。 [][] 1234512340T T x x x x x x l l l l ?== 考虑到机构的杆长按比例变化时,不会改变其运动规律,因此在计算时常l 1=1 , 而其他杆长按比例取为l 1 的倍数。 ()()22212430124arccos 2l l l l l l l ???++-=??+???? ()221243034arccos 2l l l l l l ψ??+--=?????? 经分析后,只有三个变量为独立的: [][] 123234T T x x x x l l l == 2.目标函数的建立 目标函数可根据已知的运动规律与机构实际运动规律之间的偏差最小为指标来建立,即 平面连杆机构 一、填空题: 1.平面连杆机构是由一些刚性构件用副和 2.平面连杆机构是由一些 3.在铰链四杆机构中,运动副全部是副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为。 5.在铰链四杆机构中,只能摆动的连架杆称为 6.在铰链四杆机构中,与连架杆相连的构件称为 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用 8.对心曲柄滑快机构 8.偏置曲柄滑快机构急回特性。 10. 对于原动件作匀速定轴转动, 从动件相对机架作往复运动的连杆机构, 是否有急回特性, 取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于 12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取为原动件时,可能有死点。 14.机构处在死点时,其压力角等于 15.平面连杆机构,至少需要构件。 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和其他两杆之和。 A <=; B >=; C > 。 2. 铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和, 而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。 3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以为机架时,有两个曲柄。 A 最短杆相邻边; B 最短杆; C 最短杆对边。 4. 铰链四杆机构中, 若最短杆与最长杆长度之和小于其余两杆长度之和, 当以为机架时,有一个曲柄。 A 最短杆相邻边; B 最短杆; C 最短杆对边。 5. 铰链四杆机构中, 若最短杆与最长杆长度之和小于其余两杆长度之和, 当以为机架时,无曲柄。 A 最短杆相邻边; B 最短杆; C 最短杆对边。 6.铰链四杆机构中,若最短杆与最长杆长度之和 摇杆机构。 A <; B >; C = 。 7. 一曲柄摇杆机构,若曲柄与连杆处于共线位置。则当为原动件时, 称为机构的死点位置。 A 曲柄; B 连杆; C 摇杆。 案例3 平面连杆机构优化设计 一、问题描述 平面连杆机构是由所有构件均由低副连接而成的机构,四杆机构是最常用的平面连杆机构。一般情况下,四杆机构只能近似实现给定的运动规律或运动轨迹,精确设计较为复杂。在四杆机构中,若两连架杆中的一个是曲柄,另一个是摇杆,则该机构为曲柄摇杆机构。曲柄摇杆机构可将曲柄的连续转动转变为摇杆的往复摆动。 设计一曲柄摇杆机构(如图1所示)。已知曲柄长度l 1=100mm ,机架长度l 4=500mm 。摇杆处于右极限位置时,曲柄与机架的夹角为φ0,摇杆与机架的夹角为ψ0。在曲柄转角φ从φ0匀速增至φ0+90°的过程中,要求摇杆转角()200π 32 ??ψψ-+ =。为防止从动件卡死,连杆与摇杆的夹角γ只允许在45°~135°范围内变化。 图1 机构运动简图 二、基本思路 四杆机构的设计要求可归纳为三类,即满足预定的连杆位置要求、满足预定的运动规律要求、满足预定的轨迹要求。本案例中,要求曲柄作等速转动时,摇杆的转角满足预定运动规律()00E π 32 ??ψψ-+ =。优化设计时,通常无精确解,一般采用数值方法得到近似解。本案例将机构预定的运动规律与实际运动规律观测量之间的偏差最小设为目标,由此建立优化设计数学模型,并运用MA TLAB 优化工具箱的相关函数进行求解。 三、要点分析 优化设计数学模型的三要素包括设计变量、目标函数和约束条件。依次确定三要素后,编写程序进行计算。 1.设计变量的确定 通常将机构中的各杆长度,以及摇杆按预定运动规律运动时,曲柄所处的初始位置角φ0列为设计变量,即 T 04321T 54321)()(?l l l l x x x x x ==X (1) 考虑到机构各杆长按比例变化时,不会改变其运动规律,因此在计算可取l 1为单位长度,而其他杆长则按比例取为l 1的倍数。若曲柄的初始位置对应摇杆的右极限位置,则φ0及ψ0均为杆长的函数,即 4 212 32 42210)(2)(cos arc l l l l l l l +-++=? (2) 4 32 32 422102)(cos arc l l l l l l --+=ψ (3) 因此,设计变量缩减为3个独立变量,即 T 432T 321)()(l l l x x x ==X (4) 2.目标函数的建立 以机构预定的运动规律观测量ψE i 与实际运动规律观测量ψi 之间的偏差平方和最小为指标来建立目标函数,即 min )()(1 2E →-=∑=m i i i f ψψX (5) 式中,m 为输入角的等分数;ψE i 为预期输出角,ψE i=ψE (φi );ψi 为实际输出角。由图2可知: ? ? ?<≤+-<≤--=)π2π(π) π0(πi i i i i i i ?βα?βαψ (6) 32 22322arccos l l l i i i ρρα-+= (7) 42 12422arccos l l l i i i ρρβ-+= (8) i i l l l l ?ρcos 2412421-+= (9) 一、填空题: 1.平面连杆机构是由一些刚性构件用低副连接组成的。 2.由四个构件通过低副联接而成的机构成为四杆机构。 3.在铰链四杆机构中,运动副全部是转动副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6.在铰链四杆机构中,与连架杆相连的构件称为连杆。 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8.对心曲柄滑快机构无急回特性。9.偏置曲柄滑快机构有急回特性。 10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于0。12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取滑块为原动件时,可能有死点。 14.机构处在死点时,其压力角等于90o。 15.平面连杆机构,至少需要4个构件。 二、判断题: 1.平面连杆机构中,至少有一个连杆。(√) 2.平面连杆机构中,最少需要三个构件。(×) 3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(√) 4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 5.有死点的机构不能产生运动。(×) 6.机构的压力角越大,传力越费劲,传动效率越低。(√) 7.曲柄摇杆机构中,曲柄为最短杆。(√) 8.双曲柄机构中,曲柄一定是最短杆。(×) 9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 10.平面连杆机构中,压力角的余角称为传动角。(√) 11.机构运转时,压力角是变化的。(√) 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A <=; B >=; C > 。 2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两 1 图11所示铰链四杆机构中,已知各杆长度AB l =42mm ,BC l =78mm ,CD l =75mm ,AD l =108mm 。要求 (1) 试确定该机构为何种机构; (2) 若以构件AB 为原动件,试用作图法求出摇杆CD 的最大摆角?, 此机构的极位夹角θ,并确定行程速比系数K (3) 若以构件AB 为原动件,试用作图法求出该机构的最小传动角 min γ; (4) 试分析此机构有无死点位置。 图11 2 如图12所示,连杆BC 的长度BC l 及其两个位置11C B 、22C B 为已知,试设计一铰链四杆机构ABCD ,使得AB 杆为原动件时,机构在此位置时的传动角相等,并满足机架AD 的长度为AD l 。 图12 3 图13示为一铰链四杆机构ABCD 的固定铰链A 、D ,已知主动件AB 的三个位置和连杆上K 点所对应的三个点。试求: (1) 确定连杆上铰链C 的位置和连架杆CD 的长度; (2) 验算其主动件是否为曲柄; (3) 指出最小传动角min 的位置并确定其数值。 图13 4 图15示为一曲柄滑块机构AC O A ,当滑块从1C 移到2C 时,连架杆B O B 上的一条标线1E O B 转至2E O B ;当C 从2C 移到3C 时,E O B 从2E O B 转至3E O B 。现欲将曲柄A O A 与连架杆B O B 用一连杆AB 连接起来,试求铰链点1B 的位置,并画出机构第一位置的机构简图。(写出简要作图步骤,保留作图线) 图8.15 5设计曲柄摇杆机构ABCD 。已知摇杆CD 的长度l CD =290mm ,摇杆两极限位置间的夹角ψ=32o,行程速比系数K=1.25,连杆BC 的长度l BC =260mm 。试求曲柄AB 的长度l AB 和机架AD 的长度l AD 。(解法不限) 6 在曲柄摇杆机构,曲柄为主动件,转速min 601r n =,且已知曲柄长mm l AB 50=,连杆长mm l BC 70=,摇杆长mm l CD 80=,机架长 mm l AD 90=, (工作行程平均速度<空回行程速度),试问: (1) 行程速度系数K=? (2) 摇杆一个工作行程需要多少时间? (3) 最小传动角min γ=? 1、通常利用机构中构件运动时的惯性,或依靠增设在曲柄上的惯性来渡过“死点”位置。 2、曲柄滑块机构是由曲柄摇杆机构的长度趋向而演变来的。 3、导杆机构可看做是由改变曲柄滑块机构中的而演变来的。 4、将曲柄滑块机构的改作固定机架时,可以得到导杆机构。 5、曲柄摇杆机构产生“死点”位置的条件是:摇杆为件,曲柄为件或者是把运动转换成运动。 6、曲柄摇杆机构出现急回运动特性的条件是:摇杆为件,曲柄为件或者是把` 运动转换成。 7、曲柄摇杆机构的不等于00,则急回特性系数就,机构就具有急回特性。 8、实际中的各种形式的四杆机构,都可看成是由改变某些构件的,或选择不同构件作为等方法所得到的铰链四杆机构的演化形式。 9、若以曲柄滑块机构的曲柄为主动件时,可以把曲柄的运动转换成滑块的运动。 10、若以曲柄滑块机构的滑块为主动件时,在运动过程中有“死点”位置。 1 自身飞轮 2摇杆无穷大 3 固定件 4 曲柄 5 主动从动往复摆动旋转 6 从动主动等速旋转往复摆动 7 极位夹角大于1 8 形状相对长度机架 9 等速旋转直线往复 10 曲柄 大题 1. 图示的四杆机构中,各杆长度为a=25mm,b=90mm,c=75mm,d=100mm,试求: 的机构? 2)若杆BC是机构的主动件,AB为机架,机构是什么类型 3)若杆BC 是机构的主动件,CD 为机架,机构是什么类型的机构? 解: 1)若杆AB 是机构的主动件,AD 为机架,因为 l AB +l AD =(25+100)mm =125mm 1 前言 随着汽车工业制造技术的发展,对于汽车发动机的动力性能及可靠性要求越来越高,而连杆的强度、刚度对提高发动机的动力性及可靠性至关重要。因此,国内外各大汽车公司对发动机连杆的材料及制造技术的研究都非常重视。“小体积、大功率、低油耗”的高性能发动机对连杆提出更新、更高的要求: (1)作为高速运动件重量要轻,减小惯性力,降低能耗和噪声; (2)强度、刚度要高,并且要有较高的韧性; 这就意味着对连杆的设计和加工有着更高的要求。其一,杆身有足够的刚度可以预防工作时发生弯曲变形;其二,连杆的大端和连杆盖有足够的刚度,以防大端变形时连杆螺栓承受附加的弯曲应力和大端失圆,使轴承润滑破坏。同时,还要求连杆组具有足够的疲劳强度和冲击韧性。[3] 连杆的优化设计 2 连杆机构 2.1 连杆机构的特点 连杆机构具有以下传送特点: 1.连杆机构中的运动副一般均为低副(故又称其为低副机构,lower pair mechanism)。其运动副元素为面接触,压力较小,承载能力较大,润滑好,磨损小,加工制造容易,且连杆机构中的低副一般是几何封闭,对保证工作的可靠性有利。 2.在连杆机构中,在原动件的运动规律不变的条件下,可用改变各构件的相对长度来使从动件得到不同的运动规律。 3.在连杆机构中,连杆上的各点的轨迹是各种不同形状的曲线(称为连杆曲线,coupler-pointcurve),其形状随着各构件相对长度的改变而改变,故连杆曲线的形式多样,可用来满足一些特定工作的需要。 利用连杆机构还可很方便地达到改变运动的传递方向、扩大行程、实现增力和远距离传动等目的。 连杆机构也存在如下一些缺点: 1.由于连杆机构的运动必须经过中间构件进行传递,因而传动路线较长,易产生较大的误差累计,同时也使机械效率降低。 2.在连杆机构运动中,连杆及滑块所产生的惯性力难以用一般平衡方法加以消除,因而连杆机构不宜用于高速运动。 此外,虽然可以利用连杆机构来满足一些运动规律和运动轨迹的设计要求,但其设计十分繁难,且一般只能近似地满足。[5] 课程作业 曲柄摇杆优化设计 姓名:XX 学号:XXXXX 班级:XXXXX XX大学机械与动力学院 目录 1摘要 2问题研究 2.1问题重述 2.2问题分析 3数学模型的建立 3.1设计变量的确定 3.2目标函数的建立 3.3约束条件的确定 3.4标准数学模型 4使用MATLAB编程求解 4.1调用功能函数 4.2首先编写目标函数 M 文件 4.3编写非线性约束函数 M 文件 4.4编写非线性约束函数 M 文件 4.5运行结果 5结果分析 6结论推广 7过程反思 8个人小结 9参考文献 1. 1 摘要: 为分析机构能够满足给定的运动规律和运动空间的要求,运用Matlab 优化工具箱进行多约束条件下的连杆机构预定轨迹优化设计的方法,从而得到最接近给定运动规律的杆长条件,使机构的运动分析直观、简单和精确,提高了曲柄摇杆机构的设计精度和效率。 2 问题研究 2.1 问题重述 要求设计一曲柄摇杆机构,当曲柄由0?转到0?+90°时,摇杆的输出角实现如下给定的函数关系: 200)(32 ??π ψψ-+= 式中0?和0ψ分别为对应于摇杆在右极限位置时曲柄和摇杆的位置角,它们是机架杆l 4为原线逆时针度量的角度,见图1。 要求在该区间的运动过程中的最小传动角不得小于45°,即: ?=≥45][min γγ 通常把曲柄的长度当成单位长度,即l 1=1。另外,根据机构在机器中的许可空间,可以适当预选机架杆的长度,现取l 4 =5。 2.2 问题分析 设计时,可在给定最大和最小传动角的前提下,当曲柄从0?转到090??+时,要求摇杆的输出角最优地实现一个给定的运动规律()f ?。这里假设要求: ()()2 0023E f φ?φ??π ==+ - (1) 图1 曲柄摇杆机构简图 对于这样的设计问题,可以取机构的期望输出角()E f φ?=和实际输出角 ()F φ?=的平方误差之和作为目标函数,使得它的值达到最小。 在图 1 所示的曲柄摇杆机构中,1l 、2l 、3l 、 4l 分别是曲柄AB 、连杆BC 、摇杆CD 和机架AD 的长度。这里规定0?为摇杆在右极限位置0φ时的曲柄起始位置角,它们由1l 、2l 、3l 和4l 确定。 3 数学模型的建立 ` 第三章平面连杆机构 机构中的运动副全为低副,称机构为连杆机构。根据机构中构件的相对运动情况,连杆机构可分为平面连杆机构、空间连杆机构和球面连杆机构。本章讨论平面连杆机构。根据平面连杆机构自由度的不同,又可将其分为单自由度、两自由度和三自由度平面连杆机构。根据运动链的结构型式,可分为开式链和闭式链机构,本章讨论闭式链机构,开式链机构将在第8章中介绍。对于闭式链机构,一般将机构中含有五个以上构件的平面连杆机构统称为平面多杆机构。本章主要讨论单自由度平面四连杆机构,简要介绍平面多杆机构。 第一节平面四连杆机构的类型 一、平面四连杆运动链 表3-1 平面四连杆运动链类型 平面四连杆机构是由四个构件通过四个低副构成的闭式链机构。四个构件和四个低副只有一种基本闭式运动链型式。四个低副可以是转动副也可以是移动副,组合后有表3-1所示的六种型式。为叙述方便,用R表示转动副,P表示移动副,每种运动链可用运动链中运动副的类型和排列顺序来表示,如RRRR型等。 在RRRR、RRRP、RRPP和RPRP四种运动链中,只要指定某一构件为机架,就可得到自由度为1的平面四连杆机构。将RRRR型机构称为平面铰链四杆机构,RRRP型机构称为含有一个移动副的平面四连杆机构,RRPP和RPRP型机构称为含有两个移动副的平面四连杆机构。在RPPP和PPPP运动链中,运动链的公共约束为4,即4族机构,此时构成的机构的自由度为2,本书中不讨论。 在表3-1的第二列中,已列出了每种运动链可以取作为机架的特征构件的类型,第三列中列出了取不同运动副特征构件为机架得到的相应机构的名称。如RRRR型运动链,取作为机架的构件运动副特征只有一种,即含有两个转动副的构件;对RRRP型运动链,取作机架的构件的运动副特征有两种可能性,即含有两个转动副的构件和含有一个转动副一个移动副的构件。 黄石理工学院毕业设计(论文)任务书 毕业设计(论文)题目:平面连杆机构的运动综合 教学院:专业班级:学生姓名: 学号:指导教师: 1.毕业设计(论文)的主要内容 (1)查阅资料,完成毕业设计开题报告; (2)按学院要求,完成1篇与毕业设计课题相关的英文文献翻译; (3)在相关软件平台(如VB或Matlab)下,用解析法实现平面连杆机构的计算机辅助设计; (4)按要求完成毕业论文。 2.毕业设计(论文)的要求 (1)了解平面机构设计综合课题的国内外发展动态及趋势; (2)在阅读相关平面机构设计综合文献的基础上,能用解析法分析和设计平面机构; (3)熟悉和掌握相关软件平台(如VB和Matlab); (4)运用相关软件平台,实现平面机构的计算机辅助设计与分析; (5)毕业设计论文要求格式规划,语句通顺,论据充分,符合学院对毕业设计论文要求。 3.进度安排 序号毕业设计(论文)各阶段名称起止日期 1 调研,查阅资料 2 开题报告,英文文献翻译 3 实现平面机构的计算机辅助设计与分析 4 完成毕业设计论文初稿 5 毕业设计论文修改,完成论文 6 论文答辩 4.其他情况说明 (1)题目开始实施后,每周星期三下午3:30在K1四楼行政办公室集中,检查进度,协调相关事项,进行组内讨论,解答问题。 (2)要求有统一的毕业设计笔记本,记录资料查阅、问题及解决方案等。每周集中时间进行检查。 (3)独立完成毕业论文。 5.主要参考文献 [1] 孙桓,陈作模主编,《机械原理》(第五版),高等教育出版社,2006 [2] 韩建友编,高等机构学,机械工业出版社,2004 [3] 王宏磊,平面连杆机构综合研究与软件开发,硕士论文,万方数据库,2005 [4] 熊滨生,现代连杆机构设计,化学工业出版社,2006. [5] 于红英,王知行,李建生,刚体导引机构一种综合方法的研究;机械设计, 2001 [6] [苏]ИИ阿尔托包列夫斯基,等. 孙可宗,陈兆雄,张世民,译. 平面机构 综合[M]. 人民教育出版社,1982. 平面连杆机构设计方案 1平面连杆机构的运动分析 1.1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。 对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。还可以根据机构闭环矢量方程计算从动件的位移偏差。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。 机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。 1.2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a.各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和。 b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。 在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。 1.3 机构的数学模型的建立 1.3.1建立机构的闭环矢量位置方程 在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。如图1所示,先建立一直角坐标系。设各构件的长度分别 为L1、L2 、L3 、L4 ,其方位角为、、、。以各杆矢量组成 一个封闭矢量多边形,即ABCDA。其个矢量之和必等于零。即: 式1 式1为图1所示四杆机构的封闭矢量位置方程式。对于一个特定的四杆机构,其各构件的长度和原动件2的运动规律,即为已知,而 =0,故由此矢量方 程可求得未知方位角、。 角位移方程的分量形式为: 式2 第三章平面连杆机构 第一节概述 平面连杆机构是由若干个构件通过低副联接而成的机构,又称为平面低副机构。由四个构件通过低副联接而成的平面连杆机构,则称为平面四杆机构。它是平面连杆机构中最常见的形式,也是组成平面多杆机构的基础。本章主要介绍平面机构的力分析,机构的效率和自锁问题。 在平面四杆机构中,如果所有的低副都是转动副,这种四杆机构则称为铰链四杆机构。它是平面四杆机构最基本的形式,其他形式的四杆机构都可看作是在它的基础上演化而成的。 平面连杆机构广泛应用于各种机构和仪表中,其主要优点有:①平面连杆机构中的运动副都是低副,组成运动副的两构件之间为面接触,故在传递同样载荷的条件下,两元素间的压强较小,且便于润滑,因而两元素的磨损较轻;②低副两元素的几何形状简单(圆柱面或平面),便于加工制造;③两构件之间的接触是靠本身的几何约束来保持的,所以构件工作可靠;④在主动件以同样的运动规律运动的条件下,如果改变各构件的相对长度,便可使从动件满足不同运动规律的要求;⑤利用平面连杆机构中的连杆可满足多种运动轨迹的要求。平面连杆机构的主要缺点有:①根据从动件所需要的运动规律或轨迹来设计连杆机构比较复杂,而且精度不高;②机构中作平面复杂运动和往复运动的构件所产生的惯性力难以平衡,所以不适用于高速的场合;③机构中具有较长的运动链(即较多的构件和运动副),则各构件的尺寸误差和运动副的间隙将使机构存在较大的累积误差,造成运动规律的偏差增加,同时也会使机械效率降低。 第二节平面四杆机构的基本型式及其演化 一、四杆机构的基本型式 铰链四杆机构是平面四杆机构的基本型式,见图3-1。其中AD 为机架,与机架相连的AB杆和CD杆称为连架杆,不与机架相连的 BC杆称为连杆。一般情况下连杆作复杂的平面运动。能作整周回 转运动的连架杆称为曲柄,只能在一定角度内摆动的连架杆称为摇 杆。图3-1 铰链四杆机构 根据铰链四杆机构有无曲柄,可将其分为三类。 1.曲柄摇杆机构 两连架杆中一个为曲柄,另一个为摇杆的四杆机构,称为曲柄摇杆机构。搅拌机(图3-2)及缝纫机脚踏驱动机构(图3-3)均为曲柄摇杆机构。 2.双曲柄机构 两连架杆均为曲柄的四杆机构称为双曲柄机构。图3-4所示的惯性筛及图3-5所示的机车车轮联动机构都为双曲柄机构。惯性筛机构中,主动曲柄AB等速回转一周时,从动曲柄CD将以变速回转一周,使筛子EF获得较大的加速度,被筛的材料将因惯性而被筛选。第三章 平面连杆机构及其设计习题解答
平面连杆机构优化设计
机械基础-案例11实现预定轨迹的平面四连杆机构的优化设计
第三章 平面连杆机构
平面连杆机构的优化设计教案
第六章平面连杆机构讲解
03平面连杆机构优化设计
平面连杆机构及其设计(参考答案)
第三章 平面连杆机构及其设计习题
第三章平面连杆机构
连杆的优化设计
基于MATLAB的曲柄摇杆机构优化设计
第3章 平面连杆机构(第3.1节)
平面连杆机构的运动综合()大学毕设论文
平面连杆机构设计方案
第三章 平面连杆机构
相关主题
文本预览