
第一章绪论
§1.1研究背景及意义
电力系统最重要的任务是提供高质量和高可靠性的电力。电力传输必须依靠高压输电线路,它的安全稳定运行直接影响电力系统的可靠性。由于输电线路分布点多、面广,绝大部分远离城镇,所处地形复杂,自然环境恶劣,且电力线及杆塔附件长期暴露在野外,会受到持续的机械张力、电气闪络、材料老化的影响而产生断股、磨损、腐蚀等损伤,如不及时修复更换,原来微小的破损和缺陷就可能扩大,最终导致严重事故,造成大面积停电,从而造成极大的经济损失和严重的社会影响。所以,必须对输电线路进行定期巡视检查,随时掌握和了解输电线路的运行情况以及线路周围环境和线路保护区的变化情况,以便及时发现和消除隐患,预防事故的发生,确保供电安全。目前,对输电线路的巡检主要采用两种方法,即地面人工目测法和直升飞机航测法。前者的巡检精度低,劳动强度大,且存在巡检盲区。部分地区大雪封山时,车辆和行人无法进入(如图1.1所示);在深山还有野兽出没,这给巡视人员带来了很大的安全隐患;后者则存在飞行安全隐患且巡线费用昂贵(如图1.2所示)。如果用直升机巡视替代地面巡视,则每100公里1年巡视费用同塔双回线需217.92万元(单回线136万元)。如果用直升机在整个东北电网覆盖地区巡视则需超过5000万元。费用过于昂贵,直接限制了直升机巡视的广泛推广。
由于巡线机器人可以克服上述缺陷,因此,巡线机器人已成为特种机器领域的一个研究热点。巡线机器人不仅可以减轻工人巡线的劳动强度,降低高压输电的运行维护成本,还可以提高巡检作业的质量和科学管理技术水平,对于增强电力生产自动化综合能力,创造更高的经济效益和社会效益都具有重要意义。
巡线机器人悬挂于架空避雷线上,并以此为行驶作业路径,通过自动控制方式完成输电线路巡检作业,及对线路的机械电气故障,包括绝缘子劣化和污秽、导线的机械破损、连接金具机械松脱等故障进行检测。其特殊的作业环境要求机器人能够沿输电导线全程运行,包括沿输电导线的直线段和耐张线段实现滚动爬行,跨越及避让悬垂线夹、悬垂绝缘子、防振锤、耐张线夹等结构型障碍物。
因此,机器人的本体设计是整机设计中一个相当重要的部分,需经过多次反复才能完成;在进行机器人结构分析和设计时,需要建立一定的实验环境(导线物理模型、障碍物等),对样机进行多次实验以检验其是否能达到预期的目标,这就导致其设计的周期长、设计效率低以及改型工作量大等缺点。此外,样机的单机制造增加了成本。在竞争的市场条件下,基于物理样机的设计验证过程严重
地制约了产品质量的提高、成本的降低及市场推广应用。
然而,利用仿真技术可以方便地建立机器人的虚拟样机模型。在设计之初,就可以实现对整个系统的运动分析、动力分析、载荷及应力分析等,可大大提高机器人本体设计的质量和效率。而且,仿真软件的应用可以使设计更为优化,即在计算机上修改设计缺陷,仿真试验不同的设计方案,对整个系统进行不断改进,
直至获得最优设计方案[]1。同时,通过计算机仿真可以代替己有的物理样机进行
各种状态的仿真分析,降低物理样机现场实验的风险。利用仿真数据对模型进行修改,综合仿真数据与理论数据对所设计的虚拟样机性能做出准确的评价及提出建议。
本文将仿真技术引入到巡线机器人机构、运动学分析中,为研究巡线机器人作业性能及运动学特性,从虚拟样机的角度,提供了一定的参考依据。本文所建立的巡线机器人全参数化模型,可以通过实验数据对其进行修正,从而为机构的设计优化、路径规划等做出铺垫。
§1.2架空线路巡线机器人与机器人仿真文献综述
1.2.1架空线路巡线机器人研究概况
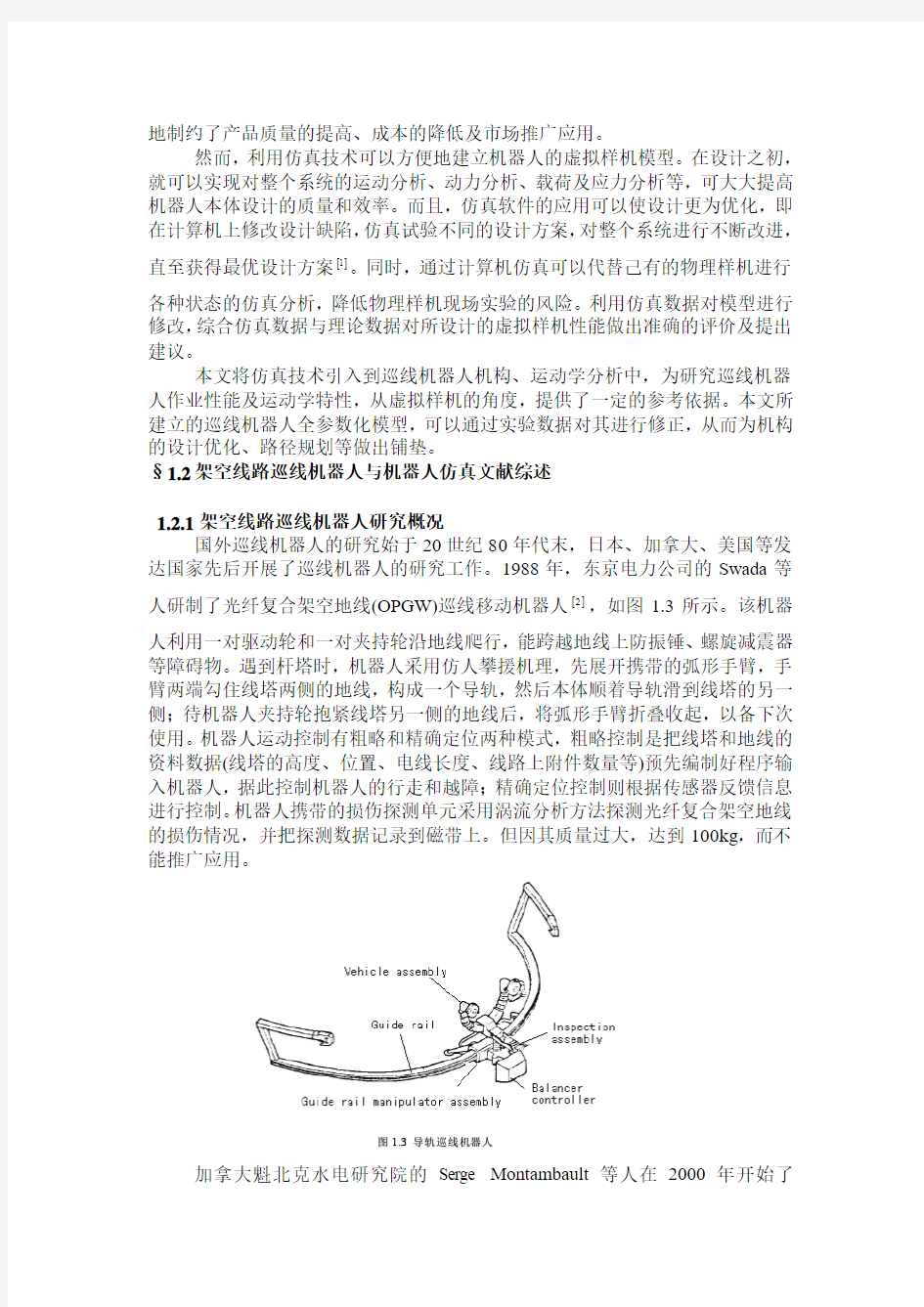
国外巡线机器人的研究始于20世纪80年代末,日本、加拿大、美国等发达国家先后开展了巡线机器人的研究工作。1988年,东京电力公司的Swada等
人研制了光纤复合架空地线(OPGW)巡线移动机器人[]2,如图1.3所示。该机器
人利用一对驱动轮和一对夹持轮沿地线爬行,能跨越地线上防振锤、螺旋减震器等障碍物。遇到杆塔时,机器人采用仿人攀援机理,先展开携带的弧形手臂,手臂两端勾住线塔两侧的地线,构成一个导轨,然后本体顺着导轨滑到线塔的另一侧;待机器人夹持轮抱紧线塔另一侧的地线后,将弧形手臂折叠收起,以备下次使用。机器人运动控制有粗略和精确定位两种模式,粗略控制是把线塔和地线的资料数据(线塔的高度、位置、电线长度、线路上附件数量等)预先编制好程序输入机器人,据此控制机器人的行走和越障;精确定位控制则根据传感器反馈信息进行控制。机器人携带的损伤探测单元采用涡流分析方法探测光纤复合架空地线的损伤情况,并把探测数据记录到磁带上。但因其质量过大,达到100kg,而不能推广应用。
加拿大魁北克水电研究院的Serge Montambault等人在2000年开始了
HQLineROVer遥控小车(见图1.4)的研制工作[]4,3,遥控小车起初用于线路巡检、
维护等多用途移动平台。第三代原型机构紧凑,仅重25kg,驱动力大,抗电磁干扰能力强,能爬52度的斜坡,通信距离可达1000m,小车采用灵活的模块化结构,安装不同的工作头即可完成架空线视觉和红外检查、压接头状态评估、导线和地线更换、导线清污和除冰等带电作业,已在工作电流为800A的315kV电力线上进行了多次现场测试,但是HQ LineROV er没有越障能力,只能在两线塔间的电力线上工作。
美国TRC公司1999年研制了一台悬臂巡线机器人原型,如图1.5所示。它能沿架空导线长距离爬行,执行电晕损耗、绝缘子、结合点、压接头等视觉检查任务,对探测到的线路故障数据预处理后,传送给地面人员。当机器人遇到杆塔时,利用手臂采用仿人攀援的方法从侧面越过杆塔。其缺点是无法攀爬30度以上的斜坡而不能广泛应用。
文献[]6中,介绍了工作于66kV光纤架空地线,能够跨越防振锤和线夹的
机器人。文献[]7给出了一种新型移动机器人机构,由双臂、四套执行机构和手爪构成,该机器人能够沿架空地线行走,并且能够跨越杆塔。文献[]8给出了一种能够沿架空地线行走并且跨越防振锤、杆塔、线夹等障碍物的移动机器人。但上述
机器人都具有18个以上的自由度,导致功耗过高而不能应用到实际工作中[]9。
图1.6是中国科学院沈阳自动化研究所研制出的具有自主知识产权的超高压输电线路巡检机器人,并于2006年4月12日与锦州超高压局合作开展了现场带电巡检试验,在其所管辖的500kV超高压输电线(东辽二线)上成功地完成了沿线行走,但没有越障能力。
综合国内外对于巡线机器人的研究情况,当代巡线机器人的研究主要集中
于以下几个方面[]11,10:
(1)机器人结构
机器人机械结构形式的选型和设计,是根据实际需要进行的。在机器人机构方面,结合机器人在各个领域及各种场合的应用,研究人员开展了丰富而富有创造性的工作。但大多数仍处于实验阶段,而轮式机器人由于其控制简单、运动
稳定和能源利用率高等特点,正在向实用化迅速发展[]12。
(2)运动控制技术
稳健的运动控制技术是移动机器人整体性能的基础,由于移动机器人本身是一个非完整约束系统,是一个欠驱动的零漂移的动力学系统,因此,该系统不能通过连续可微的时不变的状态反馈加以镇定。为此,通过时变、不连续控制以及混合策略,根据动力学模型和运动学模型,建立合理的反馈控制律,实现车速和转向的自动控制,以及不同工作状态之间的平稳过渡,是该项技术的核心内容。
(3)路径规划技术
该技术主要包括基于地理信息的全局路径规划技术和基于传感信息的局部路径规划技术。由于自主式移动机器人在地面上行驶,必须避开它无法通过的或对其安全行驶构成威胁的障碍物或区域,因此局部路径规划,尤其是复杂环境下的路径规划问题,显得更为重要。
(4)实时视觉技术
该技术主要涉及到视觉信息的实时采集、预处理、特征提取和模式识别。而且,视觉信息处理的能力、处理速度、处理的可靠性和准确性是决定智能机器人整体性能的决定性因素。
(5)定位和导航技术
该技术是现代轮式移动机器人研制所急需的关键技术,也是下一代无人战
车的技术基础。位置的测量可以分为相对位置测量和绝对位置测量,测量方法有里程计、惯性导航、主动灯塔、磁罗盘、全球定位系统、地图模型匹配和自然路标导航等。
(6)多传感集成和数据融合技术
自主式移动机器人采用测距技术,GPS定位技术和小型陀螺仪技术等多种传感技术来采集不同类型的环境信息。因此,准确地处理和分析不同传感器采集到的信息,用于对所处环境作出准确可靠的描述并据此作出正确的决策和控制,是多传感集成和数据融合研究的任务。
(7)检测技术
一种是可见光检测方法,采用高分辨率摄像机摄取目标图像,一般能发现架空线大部分表面故障现象,精度和准确度取决于图像质量。如何让巡线机器人自主控制携带的摄像设备,捕捉特定目标,获取多视角、高清晰度目标图像是关键;另一种是红外探测技术,当输电导线存在诸如导线断股、绝缘子破损等故障时,故障点附近会出现局部温升,产生热辐射。这些故障难以通过视觉检查发现,我们可以采用红外探测技术加以弥补。具体来说,就是热成像技术,这是一种广泛用于输变电系统的故障探测技术,可以摄取表面温度超过周围环境温度的异常温升点的红外光谱图像,然后根据图像,人工或自动判读可能的故障器件。
(8)高性能计算技术
在移动机器人的早期研究工作中,专用硬件结构为多数研究者所采用,这是因为当时市场上的通用硬件不能满足诸如实时图像处理所需的计算能力。近年来,随着计算机计算能力的迅猛提高,研究者们开始采用通用处理器来构建机器人系统。目前用于移动机器人的硬件结构多数采用一个高速通用处理器加上几个专用板卡或芯片(用于颜色查表、模板匹配或数学形态学计算),或者通过实验确定算法和硬件原型后,利用嵌入式的系统来缩小体积,达到优化的性能。
(9)无线通信与因特网技术
这两项技术可以实现多机器人之间的通信和信息共享,以及机器人与外部的联系。
1.2.2机器人仿真简介
仿真是以相似性原理、控制论、信息技术及相关领域的有关知识为基础,以计算机和各种专用物理设备为工具,采用系统模型对真实系统进行试验研究的一门综合性技术。它利用物理或数学方法来建立模型,类比模拟现实过程或者建立假想系统,以寻求过程的规律,研究系统的动态特性,从而达到认识和改造实
际系统的目的。计算机仿真[]15是在研究系统过程中根据相似原理,利用计算机
来逼真模拟研究对象。研究对象可以是实际的系统,也可以是设想中的系统,是将研究对象进行数学描述、建模编程,且在计算机中允许实现。它不怕破坏、易修改、可重用。计算机仿真可以用于研制产品或设计系统的全过程中,包括方案论证、技术指标确定、设计分析、生产制造、试验测试、维护训练、故障处理等各个阶段。
机器人计算机仿真具有以下意义:
1)开发前期对设计思想论证和评优,包括对各种方案的运动学及动力学特性进行评估;
2)准确的动力学模型为机器人控制提供参考依据;
3)最终设计的产品进行性能校核,包括检验机器人能否完成预定目标,及对其运行状况进行评价;
4)有效的仿真模型还可以用来对最终产品性能进行跟踪、故障预测、诊断等。
仿真技术应用于机器人,国外在70年代就开始了这一方面的研究工作。P.N.sheth和J.J.Unicker于1972年开发了机构计算机辅助设计和分析系统IMP用来分析闭环机构运动学、静力学、时间滞后及振动分析。随后诞生了ADAMS(Automatic DynamicAnalysis of Mechanical System)。两者的功能扩展到对一般机构的动力学仿真。1978年,西德Warcoke等人开发了机器人图形仿真程
序包IPA,该软件包含一个200种机器人的数据库[]17,16。法国Licgois等人联合
开发了一个包括机器人机构设计和动态分析的机器人CAD系统。美国DAUGLAS公司推出了McAuto软件包,用于机器人工作站的设计与动态仿真。John.J.MurrayCharles,PNuman等人研制的ARM软件包可自动生成机器人操作手末端相对于基座的位置矩阵和完整的拉格朗日动力学模型[]18。
国内机器人仿真的研究总体上来说起步较晚,基础薄弱。国内从80年代后期,才开始从事机器人仿真技术的研究。清华大学、浙江大学、沈阳自动化研究所及上海交通大学等做了起步工作,取得了一定成果。南京理工大学于1994年用C语言开发ROBGSS.ROLOPS系统,逐渐形成了较完善的机器人仿真系统。刘又午教授等人以底座、大臂、小臂和3个腕关节构成的、且每个关节皆为圆柱铰接的典型6自由度工业机器人为模型,对通用程序进行了简化,开发出工业机
器人动力学分析专用程序[]19。中国农业大学周一鸣教授主持开发了广义机构计
算机辅助设计系统GMCADS(Generalized Mechanisms Computer Aided Design System),该系统用迭代方法计算机械系统的自由度,在静力学分析中用势能极小原理求解系统的静平衡位置,在动力学分析中采用了哈密尔(Hamilton)正则方
程。但是,国内的软件都只停留在实验室中,离软件商品化还有很大距离[]20。§1.3本文主要内容
1、简要阐述了巡线机器人技术及其国内外发展现状和趋势。提出了本课题巡线机器人的设计方案。
2、利用CATIA软件,建立了巡线机器人基于特征的参数化模型,以此为基础建立了该机器人的虚拟样机。
3、从机构学的角度分析了巡线机器人操作臂的角位移、角速度等。
4、利用CA T/ADAMS模块将虚拟样机导入到ADAMS软件中,基于ADAMS建立了运动学仿真模型,对巡线机器人进行了运动仿真,得到了仿真曲线。验证了巡线机器人结构设计和路径规划的合理性和正确性,为机器人的后续研究打下了坚实的基础。
第二章巡线机器人本体结构的设计与三维模型的建立
由于机器人本体结构极其复杂,为了快速准确地建立其模型,并方便日后的修改和计算,利用代表目前机械CAD领域新标准的参数化设计软件CATIA来建立机器人本体结构模型,基于CATIA软件对机器人本体结构的主要零部件进行了准确的创建。
§2.1巡线机器人本体结构设计
2.1.1方案要求
要求研制一台针对500kv电压等级高压架空输电线路(其中:避雷线规格为LGJ500/45、悬垂线夹规格为CGF-6X、防振锤规格为FD-6[]22),具有自主越障
能力和爬坡能力的巡线机器人。机器人在分布式计算机控制系统的控制下,能够以一定的速度沿架空线路运动,并能跨越防振锤、耐张线夹、悬垂线夹、跳线等障碍,具有自动刹车自保功能,以避免从高空摔落。其巡线作业环境如图2.1。
所以,本文中巡线机器人的工作原理和过程为:
1)机器人上线;
2)机器人本体计算机在接收到运行命令后,驱动机器人沿避雷线行走;
3)巡线机器人通过滚轮完成沿避雷线无障碍段的行进。行进过程中检测装置不断检测前方障碍物的情况,同时摄像机对线路和机器人本身的工作状态进行拍摄,拍到的图像通过无线设备实时传输到地面工作基站,决定是否对线路进行维护;同时对机器人本身的工作状态进行监控,决定是否对机器人的运动给予干预;
4)机器人检测到前方有防振锤时,由于手掌采用中空设计,因此机器人无需做任何调整,即可直接爬越;
5)当安装在机械手前端的接近觉传感器检测到悬垂线夹时,机器人控制肘关节电机旋转,使末端执行器上移,直至驱动轮离开避雷线,然后手掌电机驱动手掌张开;其开合度要大于障碍宽度;之后,后面两只手驱动电机继续行走,当中间手接近悬垂线夹时,前臂回落,同时手掌合拢,直至挂线;然后中间手电机驱动齿轮齿条机构使中间手上移,然后手掌张开,接通前后两手的驱动电机,继续行走。当后手接近悬垂线夹时,控制中间手回落,手掌合拢,直至驱动轮挂线;之后,后肘关节电机驱动后小臂选转,手掌张开,前两驱动轮继续行走;当后手跨越线夹后,手掌闭合回落,机器人完成跨越悬垂线夹的任务,继续行进;
6)当机器人跨越跳线时,手的脱线和抱线方法与跨越悬垂线夹时相同;首先前手脱线,通过前端视觉传感器,可检测到避雷线与跳线角度,这时大臂电机按此角度旋转,使末端执行器位于跳线下方,前手抓住跳线,然后中间手脱线,启动前后手的驱动电机使机器人行走。中间手接近跳线时停止行走,调整前后柔性臂,使中间手抓住跳线,启动行走。当后手接近跳线时,停止行走,后手脱线;用前手和中间手驱动机器人继续行走,越过跳线线夹后,停止行走,调整柔性臂,使后手抓住跳线,完成从直线到跳线的跨越;机器人由跳线到直线的跨越方法与上述过程相同,由于是一个上坡过程,为了使机器人不至于滑下来,需使用刹车装置;
7)检测到转弯跳线时,运动过程与跨越直线跳线不同的地方是柔性臂的姿态除了上下调整外,还需要水平调整,其余完全相同;
8)当线路坡度较大、驱动轮摩擦驱动无法实现机器人行进时,直接表现为驱动轮打滑,此时机器人三个制动器立即抓线,并与丝杠螺旋副组成蠕动爬行机构,进行蠕动行进。
本课题对巡线机器人的主要技术指标和要求是:
1)具有自主越障能力;
2)具有一定爬坡能力;
3)单机重量:小于100千克;
2.1.2总体结构
考虑到输电线路具有防振锤、耐张线夹、悬垂线夹、跳线和转弯等各种障碍、并具有一定坡度。为了达到上述要求,巡线机器人的机械手必须动作灵活,工作范围大,能完成规定的动作,应有自由度4-5个,结构紧凑,重量轻。我们摒弃机器人常规结构形式,设计出了适用于500kv输电线路的自动巡线机器人,其总体机构二维简图如图2.2所示,三维图如图2.3所示。主要由五大部分组成:驱动装置、刹车制动装置、手掌开合装置、柔性臂、电源箱和控制箱。
2.1.3柔性臂
机械手的手臂是执行机构中的主要运动部件,它用来支承腕关节和末端执行器,并使它们能在空间运动。为了使手部能达到工作空间的任意位置,手臂一般至少有三个自由度,少数专用的工业机器人手臂自由度少于三个。手臂的结构形式有
多种,常用的构形如图2.4所示[]23.
本课题要求机器人手臂能达到工作空间的任意位置,同时要结构简单,容易控制。由于在同样的体积条件下,关节型机器人比非关节型机器人有大得多的相对空间(手腕可达到的最大空间体积与机器人本体外壳体积之比)和绝对工作空间,结构紧凑,同时关节型机器人的动作和轨迹更灵活,因此该机器人采用关节型机器人的结构。
手腕的构形也有多种形式。三自由度的手腕通常有以下四种形式:BBR型、BRR型、RBR型和RRR型。如图2.5所示。
B表示弯曲结构,表明组成腕关节的相邻运动构件的轴线在工作过程中相互间角度有变化。R表示转动结构,表明组成腕关节的相邻运动构件的轴线在工作过程中相互间角度不变。BBR结构由于采用了两个弯曲结构使结构尺寸增加了,而RBR与前者相比结构紧凑。
由于机械手的运动轨迹要求机械手端面平行于避雷线,这样用两个旋转关节就可以使机械手的姿态满足要求,且机械结构更加简单,减轻了重量。综合考虑后确定该机械手具有四个自由度,其中手臂两个自由度确定机械手的位置,后两个自由度确定手的姿态,最后确定其结构形式如图2.6所示。
综上所述,柔性臂由机座、肩关节、大臂、肘关节、小臂、腕关节和末端执行器组成。共有四个自由度,依次为大臂回转、小臂俯仰、手腕俯仰、手腕回转。肩关节和肘关节均由精密涡轮蜗杆减速器和转盘组成。电机通过精密涡轮蜗杆减速器带动转盘转动,实现手臂水平方向和竖直方向的自如运动。通过控制电机的制动装置,还能够实现手臂刚性与柔性的平滑转换,使机器人适应跨越转弯、跳线时位置和姿态的要求。通过工作情况的需要,定出该巡线机器人的机械手运动参数如下:
大臂长:250mm 手腕长:72mm
小臂长:400mm 末端执行器长:344mm
各关节转动范围:
关节1:±90°关节2:±90°
关节3:±90°关节4:±90°
2.1.4驱动装置
机器人驱动装置是带动各个关节到达指定位置的动力源。通常动力是直接或经电缆、齿轮箱或其他方法送至各个关节。目前使用的主要有三种驱动方式:液压驱动、气动驱动和电机驱动。液压驱动以高压油作为工作介质,可以实现直线运动或者是旋转运动,驱动机构可以是闭环或者是开环的。液压驱动的优点是能得到较大的出力,工作压力通常达14Mpa,但是液压元件造价高昂,而且容易泄露污染环境,而且必须配备专用的液压阀,储油罐,体积庞大。气动驱动的工作介质是高压空气,气动控制阀简单、便宜、操作简单、易于编程,可以完成大量的点位搬运操作任务,但是缺点是气压伺服难以实现高精度控制,只能用在满足低精度的场合。故本机械手采用电机驱动。电机驱动方式具有结构简单、易于控制、使用维修方便、不污染环境等优点,这也是现代机器人应用最多的驱动方式。电机可以选择步进电机或直流伺服电机。步进电机驱动具有成本低,控制系统简单的优点,但是步进电机驱动属于开环控制,精度较低。而直流伺服电机能
构成闭环控制,精度高,额定转速高[]24。
根据作业环境要求,本课题机器人行进机构采用轮式移动机构与步进式蠕动爬行机构两种方式。当线路坡度较小、驱动轮摩擦驱动可实现机器人移动时,
机器人采用轮式移动机构;当线路坡度较大、驱动轮摩擦驱动无法实现机器人行进时,直接表现为驱动轮打滑,此时机器人三个制动器立即抓线,并与丝杠螺旋副组成蠕动爬行机构,进行蠕动行进。
2.1.4.1轮式移动机构
轮式移动机构驱动装置由直流电机、伞齿轮减速器、传动轴和驱动轮组成。驱动轮采用高强度轻型材料,以减轻驱动装置重量;驱动轮外表面采用高强度耐磨材料,以增大驱动轮运动时与线路的摩擦因数,防止打滑。驱动轮支撑架(手掌)采用中空设计,使机器人遇到防振锤等障碍时,可直接越过,大大提高了机器人巡线速度。
2.1.4.2步进式蠕动爬行机构
步进式蠕动爬行机构驱动装置由直流电机、伞齿轮减速器、传动轴、滚珠丝杠、螺母和直线导轨组成。滚珠丝杠的摩擦力很小且运动响应速度快。由于滚珠丝杠在丝杠螺母的螺旋槽里放置了许多滚珠,传动过程中所受的摩擦力是滚动摩擦,可极大地减小摩擦力,因此传动效率高,可以达到90%,只需要使用极小
的驱动力就能够传递运动[]25。
2.1.5刹车制动装置
为了保证机器人在停止状态、有一只手打开或出现故障情况下不脱线和下滑,设计了刹车装置。它由活动制动爪、固定制动爪、销轴、弹簧、弹簧上底座、弹簧下底座和弹簧导向轴组成。
2.1.6手掌开合装置
手掌开合装置由涡轮蜗杆机构和平行四杆机构组成。在蜗杆驱动下带动支架开合。其中:驱动轮固定在右侧支架上,制动机构固定在左侧支架上,如图2.7所示。
§2.2机器人的建模
动力学分析要求获得机器人各个零部件的质量参数、惯性参数、质心坐标等参数,而三维实体建模并不是ADAMS的强项,故选择在CATIA环境下建立所有机器人的零部件模型及完成巡线机器人虚拟样机的装配;然后将所建模型以cmd格式导入至ADAMS环境中,在模型上施加约束、力/力矩和运动激励;最后对机械系统进行交互式的仿真分析,在系统水平上真实地预测机械结构的工作性能,实现系统的最优设计,得到合理动作规划。表2.1列出了各个零件的相关质量惯性参数。图2.8为CA TIA中建立的巡线机器人装配模型,从图中可以确定各个零部件的装配关系。
表2.1各个零部件模型的质量惯性参数
单位:质量-千克;度-毫米;力-牛顿;时间-秒;角度-度。
第三章巡线机器人机械手运动学分析
§3.1引言
本章首先分析了四自由度机械手的运动学特性,建立了机械手正、逆运动学所需的关节变量,用D-H法建立了四自由度机械手运动学模型。并分析了机械手的关节速度与雅可比矩阵。基于上述运动学模型,为仿真分析提供了理论基础。
§3.2数学基础理论
要建立机械手的运动学模型,首先要对机械手的运动学进行分析。它涉及到四自由度机械手运动学正逆解问题的运动学方程,特别是关节变量空间与机械手末行器位姿之间的关系。下面主要阐述将要用到的数学基础理论。
3.2.1刚体位姿的表示与齐次变换[]26
为了描述机械手本身的各个连杆之间、机械手和环境之间的运动关系,并且忽略了机械手连杆的弹性形变,把机械手连杆作为刚体来研究。
空间点p可以用它的相对于参考坐标系的三个坐标来表示:
其中是参考坐标系中表示该点的坐标。这种表示方法也可以稍做变化:将P点用向量形式写出并且加入一个比例因子w,则P
点表示为:,其中
变量w可以为任意数,如果w=1时,各分量的大小保持不变;如果w=0,x,y
和z都为无穷大,表示一个长度为无穷大的向量,方向为该向量所表示的方向。因此常取w=1,P向量表示参考坐标系中某一方向。
一个刚体在笛卡尔空间表示可以这样实现:通过在刚体上固连一个坐标系,再将该固连坐标系在空间表示出来。只要这个坐标系可以在空间表示出来,那么这个物体相对于固定的参考坐标系的位姿也就已知了,如图3.1所示。
如果用表示刚体上的运动坐标系(当前坐标系)原点在参考坐标系中的位置向量,表示运动坐标系n轴在参考坐标系中的方向,表示运动坐标系o轴在参考坐标系中的方向,
表示运动坐标系a轴在参考坐标系中的方向。因此刚体在参考坐标系中的位姿可以表示成:
(3.1)且满足①三个向量相互垂直;②每个单位向量的长度必须为1。这种形式的矩阵称为齐次矩阵。并且齐次矩阵的逆矩阵为:
(3.2)如果刚体保持现有的姿态不变,只是在参考坐标中的位置发生改变,那么相对于固定参考坐标系的新坐标系的位置可以用原来运动坐标系的原点位置向量加上表示位移的向量求得。用矩阵形式表述,新的运动坐标系的表示可以通过坐标系左乘变换矩阵得到。新的坐标系位置为:
(3.3)
其中是平移向量d相对于参考坐标系x,y和z轴的三个分量。
同理,如果刚体保持现有的位置不变,只是在参考坐标中的姿态发生改变,则新运动坐标系的表示也可以通过坐标系左乘变换矩阵得到。例如
,其中Rot (x,θ)表示运动坐标系绕参考坐标系的x轴旋
转θ的变换矩阵。这里给出运动坐标系绕参考坐标系的x轴,y轴和z轴旋转θ的变换矩阵,
(3.4)为简化书写,习惯用符号Cθ表示θ
sin(以下表示方法相同)。
cos,Sθ表示θ
复合变换是由固定参考坐标系或当前运动坐标系的一系列沿轴平移和绕轴旋转变换所组成的,任何变换都可以分解为按一定顺序的一组平移和旋转变换。
当刚体做相对于运动坐标系或当前坐标系的轴的变换时,需要右乘变换矩阵,而不是左乘变换矩阵,才能得到相对于运动坐标系变换后的刚体的新位姿。
3.2.2机器人运动学方程的D-H表示法
Denavit-Hartenberg(D-H)模型表示了对机器人连杆和关节进行建模的一种非常简单的方法,可用于任何机器人构型,不论机器人的结构顺序和复杂程度如何,并且在D-H模型的基础上,已经开发了许多技术,例如雅可比矩阵的计算和力分析等。
假设机器人由一系列关节和连杆组成。这些关节可能是滑动(线性)的或旋转(转动)的,可以按任意的顺序放置并处于任意的平面。连杆也可以是任意的长度(包括零),可能被扭曲或弯曲,也可能位于任意平面上。为此,需要给每个关节指定
一个参考坐标系,然后,确定从一个关节到下一个关节(一个坐标系到下一个坐标系)来进行变换的步骤。如果将从基座到第一关节,再从第一关节到第二关节直至到最后一个关节的所有变换结合起来,就得到了机器人的总变换矩阵。 图3.2表示了三个关节,每个关节都是可以转动或平移的。第一个关节指定为关节n ,第二关节为关节n+1,第三个关节为关节n+2。在这些关节的前后可能还有其他关节。连杆也是如此表示,连杆n 位于关节n 与n+1之间,连杆n+1位于关节n+1与n+2之间。
连杆构件坐标系的选择及参数的规定如下:
(1)所有关节,都用z 轴表示。如果是旋转关节,z 轴位于按右手规则旋转的方向。如果是滑动关节,z 轴为沿直线运动的方向,i z 坐标轴是沿着i+1关节的
运动轴。
(2)x i 是沿着i z 的公垂线,指向离开1-i z ,轴的方向。
(3)i y 轴的方向按构成i i i z y x 右手直角坐标系来建立。
(4) 公垂线长度i a 是1-i z 和i z 两轴间的最小距离,一般称i a 为连杆长度。
(5)两公垂线1-i a 和i a 之间的距离称为连杆距离i d 。
(6)1-i x 轴与之间的夹角为i θ,以绕1-i z 轴右旋为正,一般称i θ为连杆的夹
角。
(7)1-i z 和i z 之间的夹角i a ,以绕i x 轴右旋为正, i a 称为扭转角。
根据上述规则,给所有的连杆赋予坐标系,并且可以建立i-1和i 坐标系之间的变换关系。应当说明的是,尽管i z 通过关节i+1的轴线,但坐标系i i i z y x 固
××××学院 毕业设计说明书 题目智能巡线机器人设计 学生 系别机电工程系 专业班级机械设计制造及其自动化机电03.3班学号 指导教师
××××学院 毕业设计(论文)任务书 设计(论文)题目:智能巡线机器人设计 系:机电系专业:机械设计制造及其自动化(机电一体化) 班级:学号: 学生:指导教师: 接受任务时间 教研室主任(签名)系主任(签名) 1.毕业设计(论文)的主要内容及基本要求 1.总体方案设计; 2机械整体设计; 3.控制设计; 4编写设计说明书; 2.指定查阅的主要参考文献 1.《机器人控制电子学》 2.《机器人探索》 3.《机器人的创意设计与实践》 4.《MSP430系列——FLASH型超低功耗16位单片机》 (电子和机械方面的书)
近年来机器人的研究和应用已经不仅仅局限于军用领域。许多应用于军用机器人上的成功技术已经在民用机器人中得到了一定的应用。在工业机器人的基础上,运用了传感器技术和单片机智能控制技术,设计出了一种能自动运送货物的职能巡线机器人。 论文首先对智能巡线机器人总体设计方案进行叙述,阐述其各要素的工作原理,然后就整个智能巡线机器人系统划分为五个模块,分章节对各个模块设计制作进行阐述。 机器人机械结构部分,通过分析常用的车轮驱动配置方式,择优选择了前排安装两个万向轮、后排安装两个独立驱动轮的设计方案,充分考虑到了巡线的简易性和稳定性。 机器人传感器接口与驱动电路部分,详细阐述了光电传感器检测信号原理,叙述了设计所采用的光电传感器接口电路详细设计方案,分析了传感器采用该种布局方案的原因。针对机器人的机械特性和速度要求,选用了L298N驱动芯片驱动电机,分析了它的优缺点和可行性。 机器人主控系统硬件部分阐述了主控芯片选型,主控电路设计方案,以及相应的接口说明。软件部分在MSP430平台上实现了快速、稳定、准确的巡线方法。 关键词:机器人;巡线;光电检测;PWM驱动。
机械装备设计制造综合技能大赛 设 计 说 明 书 姓名:孙小平洪耀林徐海昌 指导老师:黄伟玲 2014年9月17日 江西·赣州
摘要 随着计算机技术,人工智能技术的迅速发展以及智能采集器的不断改进和推陈出新,智能信息采集装置已经取得了很大进展。但是对于应用比较复杂通用性较高的全自动信息采集车还没有突破性的进展。智能数据信息采集车的研究将会告别信息相互孤立缺乏联动性的现象,是一个复杂的,面向智能化的,不断发现的过程。近年来,很多关于信息采集的研究和设计,尤其是智能数据信息采集车更是吸引了很多人的眼球。对于智能信息采集车来说,不但要有环境信息获取功能,还要有对信息理解和信息处理的功能。对自动信息采集车的研究是针对环境空间的识别,然后建立相应数据通道,通过雷达和无线装置把获取的数据传送到终端。 智能信息采集车采用了应用范围广,性价比高的基于单片机的多数据通道采集系统,将来自传感器的信号通过转换器转换为数字信号后由单片机采集然后利用SPI通信将数据送到主机进行数据的存储后期处理与显示实现数据处理功能强大的智能化高端信息采集设备。 智能数据信息采集车是一个集自动驾驶、环境感知、规划决策等功能于一体的综合系统。它集中的运用了人工智能、导航、传感器及自动控制等技术;应用了计算机、信息传递、通信交流等现代装备,是典型的高新技术综合体。 关键词:智能信息采集车、智能化、传感器、数据通道、现代装备
第一章绪论 (1) 1.1 信息采集的现状及发展概述 (1) 1.2信息采集车国内外研究现状 (2) 1.3智能信息采集车的背景意义 (4) 1.4 设计要求及内容 (6) 第二章智能信息采集车的结构与工作原理 (6) 2.1 数据获取装置的设计 (6) 2.2 行走方案选择 (7) 2.3基本结构 (9) 2.4工作原理 (11) 第三章智能信息采集车的功能与特点 (12) 3.1 智能信息采集车的功能 (12) 3.2智能信息采集车的特点 (13) 第四章智能信息采集车的设计思路 (15) 4.1 基本工作思路 (15) 4.2动力选择思路 (15) 4.3设计后的调整 (16) 第五章总结与展望 (17) 参考文献 (18)
一种智能机器人系统设计和实现 我们从广泛意义上理解所谓的智能机器人,它给人的最深刻的印象是一个独特的进行自我控制的"活物".其实,这个自控"活物"的主要器官并没有像真正的人那样微妙而复杂。智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来。我们称这种机器人为自控机器人,以便使它同前面谈到的机器人区分开来。它是控制论产生的结果,控制论主张这样的事实:生命和非生命有目的的行为在很多方面是一致的。正像一个智能机器人制造者所说的,机器人是一种系统的功能描述,这种系统过去只能从生命细胞生长的结果中得到,现在它们已经成了我们自己能够制造的东西了 嵌入式是一种专用的计算机系统,作为装置或设备的一部分。通常,嵌入式系统是一个控制程序存储在ROM中的嵌入式处理器控制板。事实上,所有带有数字接口的设备,如手表、微波炉、录像机、汽车等,都使用嵌入式系统,有些嵌入式系统还包含操作系统,但大多数嵌入式系统都是是由单个程序实现整个控制逻辑。嵌入式技术近年来得到了飞速的发展,但是嵌入式产业涉及的领域非常广泛,彼此之间的特点也相当明显。例如很多行业:手机、PDA、车载导航、工控、军工、多媒体终端、网关、数字电视…… 1 智能机器人系统机械平台的搭建 智能机器人需要有一个无轨道型的移动机构,以适应诸如平地、台阶、墙壁、楼梯、坡道等不同的地理环境。它们的功能可以借助轮子、履带、支脚、吸盘、气垫等移动机构来完成。在运动过程中要对移动机构进行实时控制,这种控制不仅要包括有位置控制,而且还要有力度控制、位置与力度混合控制、伸缩率控制等。智能机器人的思考要素是三个要素中的关键,也是人们要赋予机器人必备的要素。思考要素包括有判断、逻辑分析、理解等方面的智力活动。这些智力活动实质上是一个信息处理过程,而计算机则是完成这个处理过程的主要手段。 机器人前部为一四杆机构,使前轮能够在一定范围内调节其高度,主要功能是在机器人前部遇障碍时,前向连杆机构随车轮上抬,而遇到下凹障碍时前车轮先下降着地,以减小震动,提高整机平稳性。在主体的左右两侧,分别配置了平行四边形侧向被动适应机构,该平行四边形机构与主体之间通过铰链与其相连接,是小车行进的主要动力来源。利用两侧平行四边形可任意角度变形的特点,实现自适应各种障碍路面的效果。改变平行四边形机构的角度,可使左右两侧车轮充分与地面接触,使机器人的6个轮子受力尽量均匀,加强机器人对不同路面的适应能力,更加平稳地越过障碍,并且更好地保证整车的平衡性。主体机构主要起到支撑与连接机器人各个部分的作用,同时,整个机器人
机器人创新设计作品说明材料学校名称:景德镇高等专科学校 作品名称:探索者机器人创新设计 作品设计成员: 作品设计时间:二零一二年十月十九日
摘要 本文主要介绍了一个基于ARM7 LPC2138,32 位的高性能主控芯片控制的探索者机器人的创新设计,该设计包括C语言编程,声控、振动、触碰、光强、闪动、黑标、白标、近红外等多种传感控制,图形化编程及便携式编程三种编程模式,能满足任何软件水平的用户实现简单或复杂的自动化控制程序及其他功能实现。 在设计中,详细的展现了探索者机器人的各个功能模块、传感器的属性功能工作状况。最后,实现整个实验功能创新设计。
目录 摘要 (1) 第一章引言 (1) 1.1 探索者机器人创新设计概 述 (2) 1.2 探索者机器人创新设计特点 (2) 1.3 探索者机器人创新设计目的 (3) 1.4 探索者机器人创新设计意义和前景 (4) 第二章、主控板 (5) 第三章、红外接收头 (5) 第四章、语音模块 (5) 第五章、LED 模块 (6) 第六章、舵机 (6) 第七章、传感器 (7) 7.1 黑标/白标传感器 (8) 7.2 近红外传感器 (8) 7.3 姿态传感器 (9) 7.4 闪动传感器 (9) 7.5 声控传感器 (10) 7.6 触碰传感器 (10) 7.7 振动传感器 (11) 7.8 触须传感器 (11) 7.9 光强传感器 (11) 第八章、编程手柄说明 (12) 第九章、C 语言编程基础指南 (13) 9.1 安装编程环境 (13) 9.2 第一个ARM 软件 (18) 9.3 烧写程序 (21) 9.4 ARM 主控板端口列表 (22) 9.5 库函数 (24) lib_io.c………………………………….…………………….………… 24
智能巡检机器人项目 申请报告 规划设计 / 投资分析
智能巡检机器人项目申请报告 电力设备的检修模式的发展大致可以分为三个阶段:事故检修-定 期检修-状态检修。事故检修是20世纪50年代以前主要采取的方式, 即在设备发生故障或事故以后进行检修;定期检修是一种基于时间的 检修,其理论依据是:设备能通过定期检修,周期性地恢复到接近新 设备的状态;状态检修是通过对设备状态进行监测后根据其健康状态 安排检修的一种策略,是按设备的实际运行情况来决定检修时间与部位,针对性较强,且经济合理。 市场需求主要来源于两大电网公司及其下属企业。电网公司按照 政府及其公司采购的相关管理办法,对属于国家依法必须招标的项目 以公开招标方式进行采购;对于其他产品及服务,各级电网公司可根 据实际情况,自主选择采用公开招标或非招标的方式进行采购。非招 标方式主要包括竞争性谈判、单一来源采购、询价采购以及零星采购。招标和非招标采购活动可由电网公司自行组织实施,也可由电网公司 委托招标代理机构组织实施。本行业企业主要是通过参与两大电网及 其下属公司的招投标或竞争性谈判来获取订单。
我国配电自动化发展工作起步于80年代末,随着坚强智能电网建设的提出,在总结之前的经验教训基础上,国家电网公司于2009年重新制定了智能电网配电环节的发展战略、技术导则及建设改造原则,并于2010年开展新一轮的配电自动化建设。南方电网公司也从2009年开始逐步启动配电自动化的规模试点建设,在广州、深圳、佛山、珠海等12个城市开展了试点工作。 该智能巡检机器人项目计划总投资14036.84万元,其中:固定资产投资10138.87万元,占项目总投资的72.23%;流动资金3897.97万元,占项目总投资的27.77%。 达产年营业收入28596.00万元,总成本费用22476.73万元,税金及附加242.56万元,利润总额6119.27万元,利税总额7205.87万元,税后净利润4589.45万元,达产年纳税总额2616.42万元;达产年投资利润率43.59%,投资利税率51.34%,投资回报率32.70%,全部投资回收期4.56年,提供就业职位572个。 本报告所涉及到的项目承办单位近几年来经营业绩指标,是以国家法定的会计师事务所出具的《财务审计报告》为准,其数据的真实性和合法性均由公司聘请的审计机构负责;公司财务部门相应人员负责提供近几年来既成的财务信息,确保财务数据必须同时具备真实性和合法性,如有弄虚作假等行为导致的后果,由公司财务部门相关人员承担直接法律责任;
河南机电高等专科学校《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 扣号: 姓名:流星 2014 年 10 月 1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15) 一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一
步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,利用限位开关来保护电机和控制机械手位置的准停。 这个课题可以充分的体现机电一体化的由程序自动控制机械结构的运动,对自己以前的所学的课程也是一种巩固。另一方面这个机械手可以实现一定的搬运功能具有很强的实用性能。 2、发展现状和趋势
智能机器人创新设计 This model paper was revised by the Standardization Office on December 10, 2020
智能机器人创新设计 第一阶段 智能机器人作品创新设计 智能机器人创新设计评选的目的是为了激发青少年的创新意识,鼓励机器人爱好者在机器人开发和使用中自主创新,以创新为主题,设计制作各种新颖的机器人项目,实现机器人的机械、电子、气动、软件以及传感器等方面的扩展应用,从而推动机器人应用的不断发展。 一.创新设计选题 智能机器人创新设计第一步是选题,选题应该遵循以下基本原则。 1.题目来源于生活,服务于生活 2.科学性、新颖性、展示性。 3.根据自身能力判断可行性。 二.创新设计途径 1.模仿:在已有成果的基础上,充分利用智能机器人技术,模仿其结构和控制原理。在过程中实践,在实践中应用。 2.改进:在参考原有功能和设计结构的基础上,进一步丰富和完善智能系统,使之功能更全面,更高效。 3.发明创造:历史上没有的。 三.评选原则 1.可行性原则:所设计的机器人应具备良好的可操作性和安全性。作品完成后还应充分考虑到其他人员在使用时是否能顺利启动,或者使其经过一定的努力也可以完成某一项功能或任务。鼓励设计者利用现有资源,整合费旧材料以最少的资本投入完成相关活动,显现出环保节能意识。 2.创新性原则:创新是技术活动的本质所在,在设计机器人作品时,师生应根据日常生活经验,展开丰富、科学的联想,并积极附注于实践。创造新方法、新成果、新价值。 3.智能性原则:机器人创新设计不同于一般的科技发明,其核心重在体现作品自身的智能化(如感知、规划、动作和协同等能力)。设计好的机器人创新作品可按照周围环境所提供的信息,利用各种传感器和动力装置进行信息的获取和输出,并能按照预设的程序指令决定自己的行动,要有一定的自主能力。这也正是机器人创新设计的魅力所在。
1引言 1.1设计目的 机器人可以干人不愿意干的事,把人从有毒的、有害的、高温的或危险的,这样的环境中解放出来,同时机器人可以干不好干的活,比方说在汽车生产线上我们看到工人天天拿着一百多公斤的焊钳,一天焊几千个点,就重复性的劳动,一方面他很累,但是产品的质量仍然很低;另一方面机器人干人干不了的活,这也是非常重要的机器人发展的一个理由,比方说人们对太空的认识,人上不去的时候,叫机器人上天,上月球,以及到海洋,进入到人体的小机器人,以及在微观环境下,对原子分子进行搬迁的机器人,都是人们不可达的工作。 机器人是一个具有有类人的功能,比如说作业功能;感知功能;行走功能;还能完成各种动作,还有一个特点是根据人的编程能自动的工作,这里一个显著的特点,就是可以编程,改变工作、动作、工作的对象和工作的一些要求。是人造的机器或机械电子装置,所以这种机器人仍然是个机器。但是目前还没有一个统一的有关机器人定义,一般来说认为机器人是计算机控制的可以编程的目前能够完成某种工作或可以移动的自动化机械,这是美国工程师协会定的一个定义,但日本和其他国家也对机器人有不同的看法,从完整的更为深远的机器人定义来看,应该更强调机器人智能,所以又提出来机器人的定义是能够感知环境,能够有学习、情感和对外界一种逻辑判断思维的这种机器。那么这给机器人提出来更高层次的要求,所以要求设计出机器人。 1.2设计背景 首先我介绍一下机器人产生的背景,机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,也同时,为社会经济发展产生了一个重大影响的一门科学技术,它的发展归功于在第二次世界大战中,各国加强了经济的投入,就加强了本国的经济的发展。 另一方面它也是生产力发展的需求的必然结果,也是人类自身发展的必然结果,那么人类的发展随着人们这种社会发展的情况,人们越来越不断探讨自然过程中,在改造自然过程中,认识自然过程中,实现人们对不可达世界的认识和改造,这也是人们在科技发展过程中的一个客观需要。 “迎宾机器人”是一个机电结合的制作。在现实当中,当客人来到门口时,会向客人热情的说一句“欢迎光临”,同时记下进入人数,同样当有客人从门口离
机械制造装备设计说明书 设计日期:2015年6月16日
前言 机器人(Robot)是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
目录 1、机器人型号.................................................................................. 错误!未定义书签。 2、关节机械原理图 ....................................................................... 错误!未定义书签。 3、各关节运动范围及最快速度 (4) 4、拆装过程 (6) 5、零件明细表 (6) 6、所拆关节减速器工作原理 ....................................................................................... 小结.......................................................................................................................................... 参考文献................................................................................................. 错误!未定义书签。
文章编号 2 2 2 架空电力线路巡线机器人的研究综述Ξ 张运楚 梁自泽 谭民 中国科学院自动化研究所复杂系统与智能科学重点实验室 北京 摘要 回顾了国内外架空电力线路巡线机器人的研究现状 分析了几种巡线机器人的结构特点及存在的问题 详细探讨了巡线机器人避障!工作电源及线路故障探测等关键技术 最后 展望了架空线路巡线机器人的发展趋势和应用前景 关键词 巡线机器人 架空电力线 故障探测 避障 中图分类号 ×° 文献标识码 ΜοβιλεΡοβοτφορΟ?ερηεαδΠοωερλινεΙνσπεχτιον αΡε?ιεω ≠∏ 2 ∏ 2 × (ΚεψΛαβορατορψοφΧομπλεξΣψστεμσανδΙντελλιγενχεΣχιενχε,ΙνστιτυτεοφΑυτοματιον,ΧηινεσεΑχαδεμψοφΣχιενχεσ,Βει?ινγ ,Χηινα) Αβστραχτ:× √ √ √ × √ ∏ ∏ √ 2 ∏ √ ∏ ∏ ∏ ? √ √ √ Κεψωορδσ: √ ∏ √ 1引言(Ιντροδυχτιον) 采用高压和超高压架空电力线是长距离输配电力的主要方式 电力线及杆塔附件长期暴露在野外 因受到持续的机械张力!电气闪络!材料老化的影响而产生断股!磨损!腐蚀等损伤 如不及时修复更换 原本微小的破损和缺陷就可能扩大 最终导致严重事故 造成大面积的停电和巨大的经济损失 因此 电力公司要定期对线路设备巡检 及时发现早期损伤和缺陷并加以评估 然后根据缺陷的轻重缓急 以合理的费用和正确的优先顺序 安排必要的维护和修复 从而确保供电可靠性 目前 对输电导线进行巡检的方法主要有两种 地面目测法 采用肉眼或望远镜对辖区内的电力线进行观测 由于输电线路分布点多面广!地理条件复杂 巡线工人需要翻山越岭!涉水过河!徒步或驱车巡检 这种方法劳动强度大 工作效率和探测精度低 可靠性差 航测法 直升飞机巡线 直升飞机沿输电线路飞行 工作人员用肉眼或机载摄像设备观测和记录沿线异常点的情况 这种方法尽管距离接近 提高了探测效率和精度 但电力线从观察者或摄录设备的视野中快速通过 增加了技术难度 运行费用较高≈ 移动机器人技术的发展 为架空电力线路巡检提供了新的移动平台 巡线机器人能够带电工作 以一定的速度沿输电线爬行 并能跨越防震锤!耐张线夹!悬垂线夹!杆塔等障碍 利用携带的传感仪器对杆塔!导线及避雷线!绝缘子!线路金具!线路通道等实施接近检测 代替工人进行电力线路的巡检工作 可以进一步提高巡线的工作效率和巡检精度 因此 巡线机器人成为巡线技术研究的热点 2国内外研究现状(Ρεσεαρχηστατυσατηομεανδαβροαδ) 巡线机器人的研究始于 世纪 年代末 日本!加拿大!美国等发达国家先后开展了巡线机器人 第 卷第 期 年 月机器人 ×? ≥ Ξ基金项目 国家 计划资助项目 收稿日期
毕业设计(论文)开题报告 自动化 智能循迹机器人设计(硬件部分) 一、课题的目的及意义 1. 研究目的 智能化作为现代社会的新产物,是以后的发展方向,随着信息技术的快速发展,智能化已经成为时代发展的需要,当人们遇到一些环境恶劣,不能人工完成的任务,可采用智能循迹机器人完成相关的任务,无需人为管理,即可完成预期所要达到或是更高的目标。基于生产现场和日常生活的实际需要,研究和开发智能循迹机器人具有十分重要的意义,可以提高劳动生产效率,改善劳动环境。近年来机器人的智能水平不断提高,并且迅速地改变人们的生活方式。 同遥控机器人不同,遥控机器人需要人为控制转向、启停和进退,而智能机器人则可以通过计算机编程来实现对其行驶方向、启停以及速度的控制,无需人为干预,它集中运用计算机、传感、信息、通信、导航及自动控制等技术,是典型的高技术综合体,是21世纪的科技制造点之一。随着机器人工业的迅速发展,关于机器人的研究也就越来越受到人们的关注,全国各高校也都很重视该课题的研究,可见研究意义重大,本设计就是对智能机器人的初步研究和设计,设计好的智能循迹机器人具有自动循迹、躲避障碍物等功能。 2. 研究意义 根据学校对嵌入式系统开发的需求,依据提高学生实际动手操作能力和思考能力,加强学生对现实生活中嵌入式系统的应用为参照物,智能循迹机器人全新的设计模板,良好的电路设计,机电组合,系统开发,是加强学生学习兴趣的动源,使学生可以充分发挥自主动手能力。使学生从理论到实践的运用。 二、国内外研究概况及发展趋势 现代智能机器人发展很快,从智能玩具到其它各行业都有实质成果。其基本可实现循迹、避障、检测贴片、寻光入库、避崖等基本功能,这几届的电子设计大赛智能机器人又在向声控系统发展。比较出名的飞思卡尔智能小车更是走在前列。本次设计主要实现循迹避障这两个功能。 智能机器人的发展现状智能机器人是第三代机器人,这种机器人带有多种传感器能够将
搬运机器人结构设计与分析 摘要 在当今大规模制造业中,企业为提高生产效率,保障产品质量,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平。目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作。 本课题主要对搬运机器人的机械部分展开讨论,对原有的机械结构提出了新的改进方法,并把现在的新技术应用到本课题中,从而使得搬运机器人更加适用于现在的工业工作环境。通过详细了解搬运机器人在工业上的应用现状,提出了具体的搬运机器人设计要求,并根据搬运机器人各部分的设计原则,进行了系统总体方案设计以及包括:机器人的手部、腕部、臂部、腰部在的机械结构设计。此搬运机器人的驱动源来自液压系统,执行元件包括:柱塞式液压缸、摆动液压缸、伸缩式液压缸等。通过液压缸的运动来实现搬运机器人的各关节运动,进而实现搬运机器人的实际作业。 关键词:搬运机器人;液压系统;机械结构设计;操作
Abstract In the modern large-scale manufacturing industry,enterprises to improve productivity, and,guarantee product quality, as an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. Industrial robot technology standards and application level, to a certain extent, reflect a level of national industrial automation. Currently, Industrial robot mainly tasked with welding, spraying, handling and stacking, repetitive and intensity of significant work. The subject of the main part of the handling of their machinery discussions, and on the original mechanical structure proposed for the new improved method, which makes the handling robot is more applicable to the present industrial working environment.Through a detailed understanding of the robot in the industrial application,to propose specific handling robot design requirements,and according to the robot design principles of various parts, for the system as well as including:the robot's hand, wrist, arm, waist, the design of mechanical structures.The transfer robot driven by the source from the hydraulic system, and the implementation of components including:plunger hydraulic cylinders, hydraulic cylinders, swing, telescopic hydraulic cylinders, etc.Through the hydraulic cylinder movements to implement the joint transport robot motion,And realize the operational handling robot. Keywords:Transfer robot;Hydraulic System;Mechanical Design;Operating
智能机器人设计报告 参赛者:庆东肖荣于腾飞 班级:级应用电子技术 指导老师:远明 日期:年月日 一、元器件清单: ,,,,,,,蜂鸣器,光敏电阻,光敏三极管,电阻、电容若干,超亮及普通发光管。二、主要功能: 本设计按要求制作了一个简易智能电动车,它能实现的功能是:从起跑线出发,沿引导线到达点。在此期间检测到铺设在白纸下的薄铁片,并实时存储、显示在“直道区”检测到的薄铁片数目。电动车到达点以后进入“弯道区”,沿圆弧引导线到达点继续行驶,在光源的引导下,利用轻触开关传来的电信号通过障碍区进入停车区并到达车库,完成上述任务后能够立即停车,全程行驶时间越少越好。 本寻迹小车是以有机玻璃为车架,单片机为控制核心,加以减速电机、光电传感器、光敏三极管、轻触开关和电源电路以及其他电路构成。系统由通过口控制小车的前进后退以及转向。寻迹由超亮发光二极管及光敏电阻完成,避障由轻触开关完成,寻光由光敏三极管完成。 并附加其他功能: .声控启动 .数码显示 .声光报警 三、主体设计 车体设计 左右两轮分别驱动,后万向轮转向的方案。为了防止小车重心的偏移,后万向轮起支撑作用。对于车架材料的选择,我们经过比较选择了有机玻璃。用有机玻璃做的车架比塑料车架更加牢固,比铁制小车更轻便,美观。而且裁减比较方便! 电机的固定采用的是铝薄片加螺丝固定,非常牢固,且比较美观。 轮子方案 在选定电机后,我们做了一个万向轮,万向轮的高度减去电机的半径就是驱动轮的半径。轮子用有机玻璃裁出来打磨光华的,上面在套上自行车里胎,以防止打滑。 万向轮 当小车前进时,左右两驱动轮与后万向轮形成了三点结构,这种结构使得小车在前进时比较平稳。
机器人课程设计说明书 指导教师: 院系: 班级:
: 学号:
一、课程设计的容 1、目的和意义 机器人涉及机械、电子、传感、控制等多个领域和学科。本课程设计是在《机器人学》课程的基础上,利用多传感技术、控制技术实现机器人控制系统的综合与应用,达到锻炼学生综合设计能力的目的。让我们把理论与实践结合起来,掌握更多技能。 2、设计容 (一)、机器人硬件 本课程设计使用实验室已有的移动机器人。机器人有两个驱动轮、一个从动轮,驱动轮由舵机直接驱动。机器人控制器为89S52单片机。机器人结构图如图1所示。 图1 机器人结构简图
(二)、设计任务 利用多传感器技术,实现对机器人的轨迹规划及控制。具体为:控制机器人在规定的场地避开障碍物走遍整个场地。 二C51单片机编程环境与机器人智能 1、单片机与C51系列单片机 (一)、单片机 单片机是一种集成电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的微型计算机系统,在工业控制领域的广泛应用。从上世纪80年代,由当时的4位、8位单片机,发展到现在的32位300M的高速单片机。 (二)、C51系列单片机 MCS51是指由美国INTEL公司生产的一系列单片机的总称。这一系列单片机包括了好些品种,如8031,8051,8751等,其中8051是最典型的产品,该系列单片机都是在8051的基础上进行功能的增、减、改变而来的。 本课程设计所用的AT89S52单片机是在此基础上改进而来的。AT89S52是一种高性能、低功耗的8位单片机,含8k字节ISP可反复擦写1000次的FLASH只读程序存储器,兼容标准MCS51指令系统及其引脚结
2011年全国职业院校技能大赛高职组机器人赛项 自动机器人平台说明 目录 第一章自动机器人平台概述 (3) 1.1 自动机器人平台的总体构成...........................................................................................3 1.2 自动机器人平台按键部分...............................................................................................4 1.3 机器人平台的充电...........................................................................................................4 第二章自动机器人平台系统结构. (4) 2.1自动机器人平台机械部分................................................................................................4 2.1.1 机器人平台机械部分组成...........................................................................................4 2.1.2 机器人平台运动详解...................................................................................................5 2.2 自动机器人平台控制系统...............................................................................................5 2.2.1 概述..............................................................................................................................5 2.2.2 主控制板. (5) 2.2.3 巡线传感器..................................................................................................................9 2.2.4 传感器信号处理板.....................................................................................................10 2.2.5 电机驱动板................................................................................................................12 2.3 机器人平台控制程序.....................................................................................................14 2.3.1 控制程序流程图 (15) 2.3.2 软件函数说明............................................................................................................17 第三章自动机器人平台的装配和调试 (18)
实验报告 (理工类) 课程名称: 机器人创新实验 课程代码: 学生所在学院: 机械工程学院 年级/专业/班: 2014级机电一班 学生姓名: 学号: 实验总成绩: 任课教师: 韦兴平 开课学院: 机械工程学院 实验中心名称: 机械工程基础实验中心
一设计题目 利用Arduino设计搭建智能巡线小车 二小组成员分工 姓名学号班级任务分工 袁成 三实验内容(图文记录平时上课关键知识) 1、小灯延时闪烁实验:小灯延时一秒闪烁一次,指令:delay(xx)。应用举例:delay(500); 实验一的步骤把开发板连到PC机上; (2.采用杜邦线把红外探头VCC和GND分别连接到开发板的5V和地,OUT端连到开发板的任意一个模拟量输入端口; (3.设置对应的模拟量输入端口为输入模式; (4.读取模拟量端口的值; (5.打开串口并设置波特率; (6.打开串口监视器,拿一物体遮挡在红外探头前方并移动,观察串口监视器中读取的模拟量值是否变化; (7.观察串口监视器界面的运行结果,如不符合预期设计要求,则重复修改及下载程序,直到符合要求为止。 指令:(xx)。打开串口并设置通信波特率。应用举例:(9600) ; //打开串口并设置通信波特率为9600。 指令:(val)。在串口监视器中显示变量val的值。应用举例:(val) ; //在串口监视器中显示变量val的值。 3、红外线对管实验: 前端红外探头输出是模拟电压,中控板通过电压比较器LM339模拟电压转化为高电平或者低电平两种结果,便于程序进行判断。以第一路红外探头来说明它的工作原理,IN1-为可调电阻调节的电压输入端,IN+为探头输出的电压,当IN1-大于 IN+电压时,对应的OUT1输出电压接近0V,此时,第一路的LED灯亮;当IN1-小于 IN+电压时,对应的OUT1输出电压接近5V,第一路的LED灯灭。调节可调电阻旋钮,可以改变IN-参考电压值。 指令:pinMode(pin, mode)。将一个引脚配置成输入或者输出模式。应用举例:pinMode(7, INPUT); // 将引脚7定义为输入接口;pinMode(5, OUTPUT); // 将引脚7定义为输出接口。指令:int analogRead(pin)。读取模拟输入引脚的值,并将其表示为0至1023之间的数值,对应0至5V的电压。应用举例:val = analogRead(0); // 读取模拟接口0的值,并赋值给val。 4、超声波测距实验:超声波距离测试。 6、小车循迹实验 四最终作品设计方案(图文说明设计作品原理)(20分) 1、小车循迹原理 巡线小车红巡线原理采用了红外线探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。红外探测器探测距离有限,一般最大不应超过3cm。 2、设计要求 (1)自动寻迹小车从安全区域启动。 (2)小车按指定路线运行,自动区分直线轨道和弯路轨道,在指定弯路处拐弯,实现灵活前
上海应用技术学院Shanghai Institute of Technology 组长:王文博 组员:严格,熊祚强 指导教师:周文 项目工期:2014年6月10日——2015年6月15日
摘要:本项目研发智能家庭监督机器人是基于智能手机平台之下所应用的, 在借助于ug三维建模设计,机械设计以传动设计,及嵌入式硬件的插入,成功地实现了人远距离分身控制并监督家庭情况,能够随时随地掌握家庭环境的变化,为家庭安全的保障提供了基础,并且解决了目前市场家政机器人价格昂贵的现象。 前言: 随着物联网,智能家居以及智能手机的兴起,针对国内的市场环境, 本项目研发出的一系列四款智能家庭服务机器人,本项目研发的机器人管家是一种远程交互型机器人家政机器人采用低功耗WIFI技术连接互联网及手机终端通过强大智能手机及网络云服务器的数据计算处理能力对机器人进行智能化控制,从而降低了机器人的所需硬件成本,使得家政机器人能被国内消费者所接受。此机器人装配了红外,433射频的家电控制系统,实现了远程家电控制功能,并解决了目前智能家居家电设备接口协议不统一,传统家电难以兼容的问题。此外,机器人本身留有各种传感器接口,通过采用本项目研发的红外热式,温湿度,甲醛以及PM2.5传感器机器人能够实现远程家庭环境监控,家居安防的功能。能够解决目前家庭服务类机器人依赖进口,售价高昂的市场现状。 正文:(建模方面)
如上图所示,主观三视图,以及大致轮廓视图,外观视图上采取了全新的外观设计,底部以正六棱柱作为底座,并且采用抽壳技术,扩大内部空间,方便内部嵌入传动系统,机械设计等等,并且为以后的硬件电子设施提供了空间基础,上部采用圆弧拉伸,同样扩大内部空间,便于齿轮,马达等传动设施插入,放手机的补位,采用加盖模式,内部设有弹簧等设施,加紧设备。具体如下: 一:底轮 底轮采用一般的轮胎设计,圆弧效果便于运动,轮胎表面加拉伸效果,增加抓地,增大摩擦,内部增加五角星设计,省材料, 增加美观 二:转向轮: 由于底面为正六棱柱,两个轮子不能稳定行走,并且转向不方便,故在底面加上两个可以自由旋转的转向轮,转向轮 采用平常滑板上的轮子,这样的轮,自由性比较大,可以随 意转向,而传统的车轮,自由性较低,两者互相结合,既可 以自由转向,又可以稳抓底面。建模设计上主要采用了草图 拉伸方式。 三:滚轴:
目录 1绪论 (2) 1.1机器人的论述 (2) 1.2机器人的历史现状 (4) 1.3机器人的发展趋势 (5) 2搬运机器人的总体设计 (6) 2.1搬运机器人原理设计 (6) 2.2搬运机器人的机械系统设计 (6) 3手臂设计及计算 (9) 3.1搬运机器人臂部的驱动计算 (10) 3.2臂部上零件的选型及其校核 (13) 4结论 (15) 5参考文献 (16)
阶段,例如,美国通用汽车公司1968年订购了68台工业机器人;1969年该公司又自行研制出SAM新工业机器人,并用21组成电焊小汽车车身的焊接自动线;又如,美国克莱斯勒汽车公司32条冲压自动线上的448台冲床都用工业机器人传递工件。 (3)1970年至今一直处于推广应用和技术发展阶段。1970-1972年,工业机器人处于技术发展阶段。1970年4月美国在伊利斯工学院研究所召开了第一届全国工业机器人会议。据当时统计,美国大约200台工业机器人,工作时间共达60万小时以上,与此同时,出现了所谓了高级机器人,例如:森德斯兰德公司(Sundstrand)发明了用小型计算机控制50台机器人的系统。又如,万能自动公司制成了由25台机器人组成的汽车车轮生产自动线。麻省理工学院研制了具有有“手眼”系统的高识别能力微型机器人。 其他国家,如日本、苏联、西欧,大多是从1967,1968年开始以美国的“Versatran”和“Unimate”型机器人为蓝本开始进行研制的。就日本来说,1967年,日本丰田织机公司引进美国的“Versatran”,川崎重工公司引进“Unimate”,并获得迅速发展。通过引进技术、仿制、改造创新。很快研制出国产化机器人,技术水平很快赶上美国并超过其他国家。经过大约10年的实用化时期以后,从1980年开始进入广泛的普及时代。 我国虽然开始研制工业机器人仅比日本晚5-6年,但是由于种种原因,工业机器人技术的发展比较慢。目前我国已开始有计划地从国外引进工业机器人技术,通过引进、仿制、改造、创新,工业机器人将会获得快速的发展。 1.3机器人发展趋势 随着现代化生产技术的提高,机器人设计生产能力进一步得到加强,尤其当机器人的生产与柔性化制造系统和柔性制造单元相结合,从而改变目前机械制造的人工操作状态,提高了生产效率。 就目前来看,总的来说现代工业机器人有以下几个发展趋势: a)提高运动速度和运动精度,减少重量和占用空间,加速机器人功能部件的标准化和模块化,将机器人的各个机械模块、控制模块、检测模块组成结构不同的机器人; b)开发各种新型结构用于不同类型的场合,如开发微动机构用以保证精度;开发多关节多自由度的手臂和手指;开发各类行走机器人,以适应不同的场合; c)研制各类传感器及检测元器件,如,触觉、视觉、听觉、味觉、和测距传感器等,用传感器获得工作对象周围的外界环境信息、位置信息、状态信息以完成模式识别、状态检测。并采用专家系统进行问题求解、动作规划,同时,越来越多的系统采用微机进行控制。