循迹小车
介绍:AT89C52单片机为循迹小车的检测和控制中心,实习小车的自动检测路径,正确循迹.系统通过I0口控制小车的前进及转向.循迹是小车在黑色地板上沿着白色线行驶,采用光电二极管进行信号采集,若光敏二极管检测到黑线时输出低电平,当有光时产生高电平,信号传送给单片机,来控制小车的转向,从而达到自动循迹的功能.
一设计要求:
(1)循迹:按预先设定的轨迹自动行驶.
(2)完成单片机最小系统的设计.
(3)完成外围应用电路的设计和实现.
(4)完成软件对硬件的检测和调试.
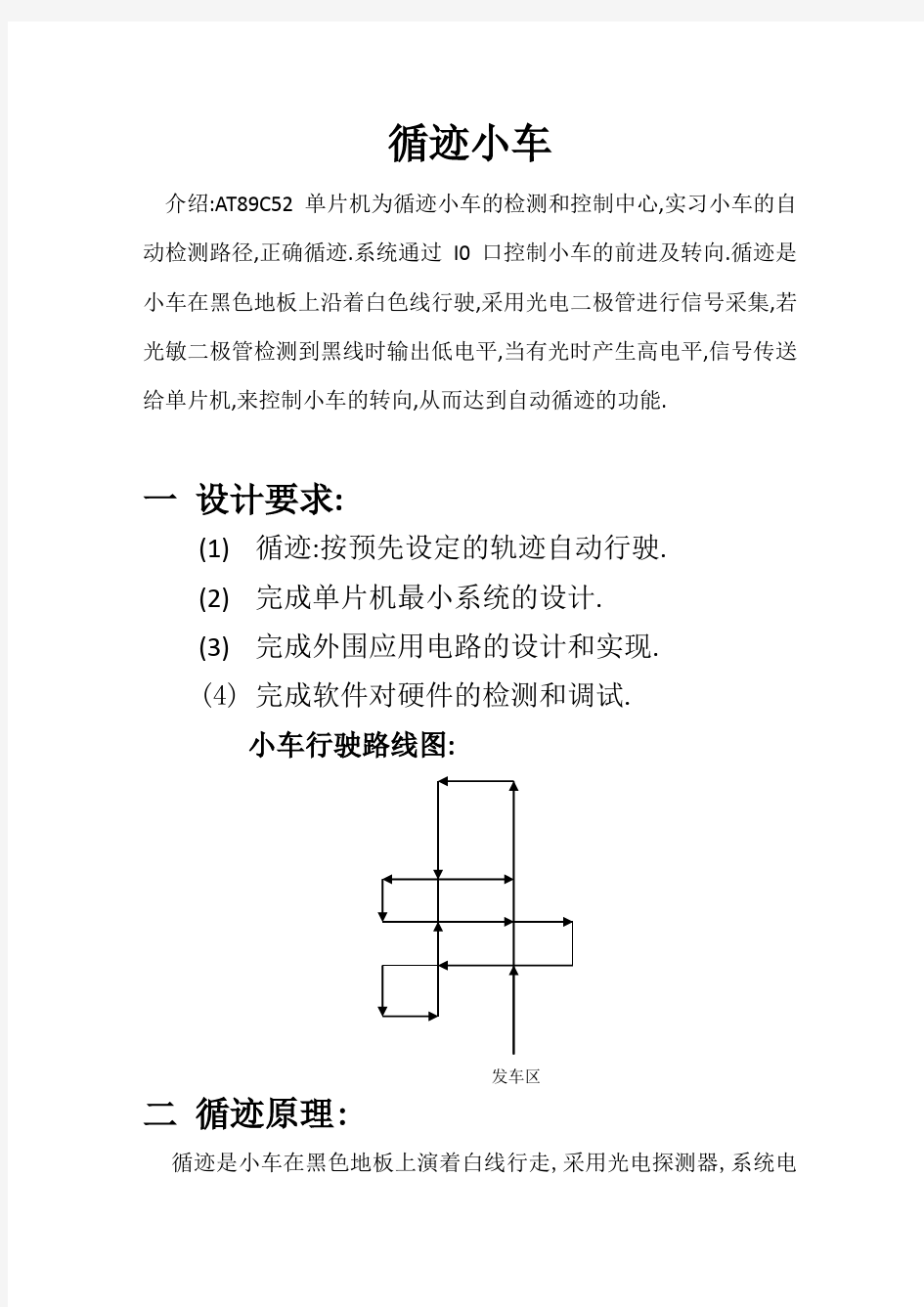
小车行驶路线图:
发车区
二循迹原理:
循迹是小车在黑色地板上演着白线行走,采用光电探测器,系统电
路发光二极管发出可见光照射到黑带时,光线被吸收,呈现高阻态,输出为低电平.当照射到白线时,光线被反射回来被光敏二极管检测到,其阻抗会减小,输出高电平.
三系统模块方案的确定:
1 光电传感器进行循迹
2 采用AT89C52单片机作为主控制器
3 L293D作为电机驱动芯片
4 LED作动态显示
四硬件系统的设计
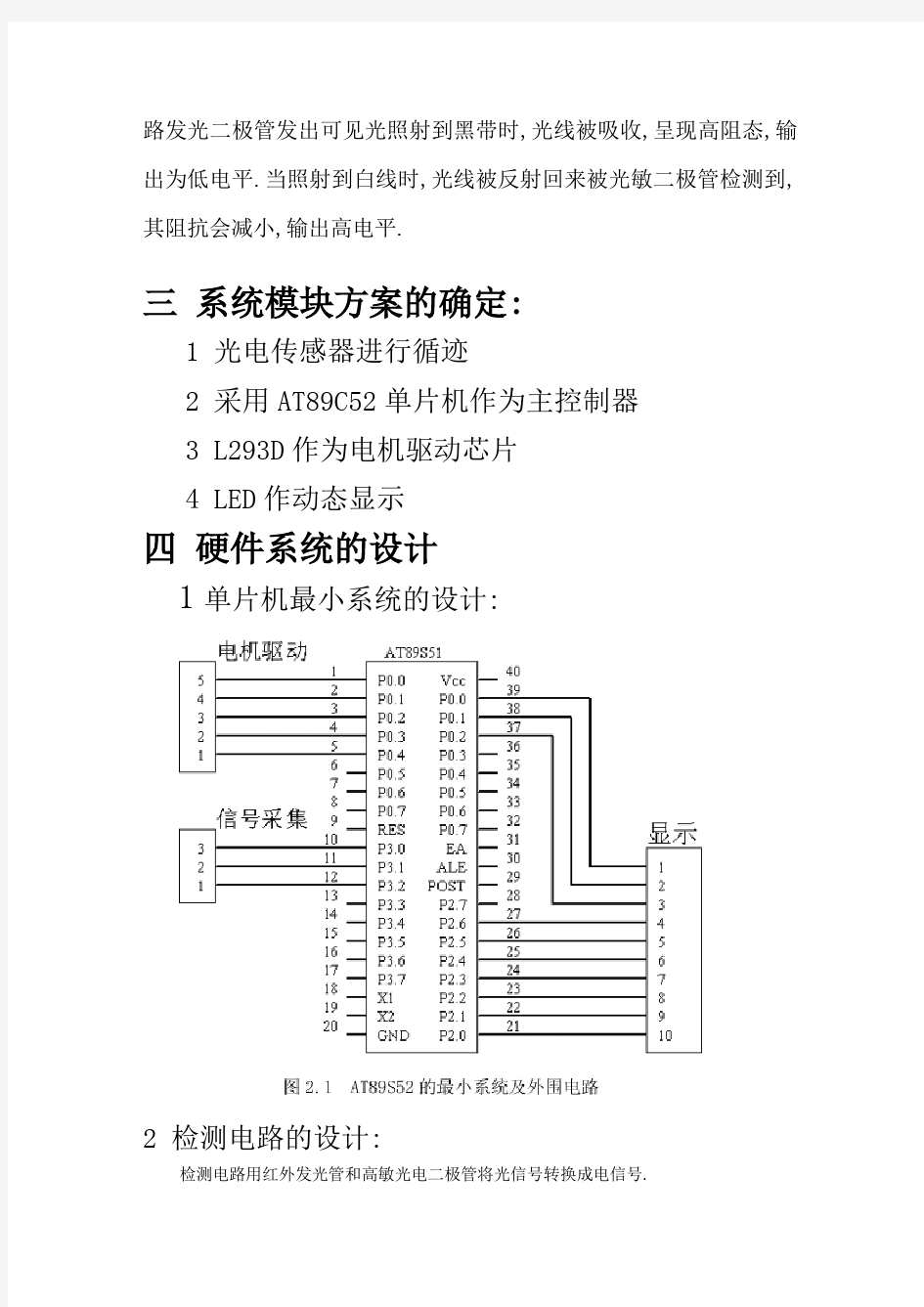
1单片机最小系统的设计:
2 检测电路的设计:
检测电路用红外发光管和高敏光电二极管将光信号转换成电信号.
3 LED显示电路的设计:
LED显示电路
4 电机驱动电路的设计:
采用L293D芯片, L293D通过内部逻辑生成使能信号,H桥电路的输入量可以用来设置马达的转向,使能信号可以用于脉宽的调整(pwm)
电机驱动电路
5 电源模块的设计:
LM7805开关电压调节器是降压型电源管理单片机集成电路,能够输出3A的驱动电流同时具有良好的线性和负载调节特性.
四软件系统的设计:
1 系统程序流程图:
图3.1系统程序流程图2 光电检测子程序:
图3.2检测子程序流程图 3 驱动电机子程序:
4 LED显示子程序:
六系统程序清单:
ORG 0H
ENY EQU P1.3
ENZ EQU P1.6
YQ EQU P1.7
ZH EQU P1.5
ZQ EQU P1.4
YH EQU P1.2
SL EQU 30H
SH EQU 31H
ML EQU 32H
KEY EQU 33H
SED EQU P2.7
AJMP MAIN
ORG 03H
AJMP INTT0
ORG 0BH
AJMP TT0
ORG 13H
AJMP INTT1
MAIN:MOV SP,#67H JNB P0.4,DD1 AJMP YAO
DD1:AJMP DD
YAO:MOV KEY,00H MOV P1,00H
SETB ENZ
SETB ENY
MOV P0,00H
CLR P2.0
INT:JB SED,$
LCALL DELAY
JB SED,INT
MOV R5,#05H
TT3:DJNZ R5,TT5
AJMP EXIT1
TT5:MOV DPL,#00H
MOV DPH,#00H
JNB SED,$
TT6:NOP
NOP
NOP
NOP
INC DPTR
JB SED,TT6
MOV A,DPH
CLR C
SUBB A,KEY
CLR C
RRC A
MOV KEY,A
AJMP TT3
TT7:MOV A,KEY
SETB C
RRC A
MOV KEY,A
AJMP TT3
EXIT1: MOV A,KEY
SWAP A
ANL A,#0FH
CJNE A,#02H,DD2 SETB ZQ
LACALL DELAY
CLRZQ
AJMP INT
DD4: CJNE A,#04H,INT SETB ZH
SETB YH
LACALL DELAY
CLR ZH
CLR YH
AJMP INT DELAY:MOV R7,#70
LL:MOV R6,#50
DJNZ R6,$
DJNZ R7,LL
RET
DD: CLR A
MOV SL,A
MOV SH,A
MOV ML,A
MOV P1,#00H
MOV TMOD,#01H MOV TL0,#0AFH MOV TH0,#03CH MOV R7,#20
SETB ET0
SETB EX0
CLR EX1
SETB IT0
SETB IT1
SETB EA
SETB ENZ
SETB ENY
SETB ZQ
SETB YQ
SETB TR0
PP:LCALL DIS
AJMP PP
INTT0:PUSH ACC
PUSH PSW
JNB P3.1,LL1 JNB P3.0,LL2 AJMP EXIT
LL1:CLR ZQ
KK1:JNB P3.0,HOU
JNB P3.0,LL2 AJMP EXIT
LL2:CLR YQ
JNB P3.1,HOU KK2:JNB P3.0,KK2
SETB YQ
AJMP EXIT
HOU:MOV P1,#00H
SETB ZH
SETB YH
CLR EX0
SETB EX1
AJMP EXIT INTT1:PUSH ACC
PUSH PSW
JNB P3.4,LL8 JNB P3.5,LL9 AJMP EXIT
LL8:CLR ZH
KK3:JNB P3.4,$
SETB ZH
AJMP EXIT
LL9:CLR YH
KK4:JNB,P3.5,$
SETB YH
AJMP EXIT EXIT:POP PSW
POP ACC
RETI
DEL:MOV R2,#5
LL5:MOV R3,#80
DJNZ R3,$
DJNZ R2,LL5
RET
DEL1:MOV R4,#10 KK:MOV R5,#100
LCALL DEL
DJNZ R5,$
DJNZ R4,KK
RET
TT0:PUSH ACC
PUSH PSW
DJNZ R7,EXT
MOV R7,#20
INC SL
MOV A,SL
CJNE A,#10,EXT MOV SL,#00H
INC SH
MOV A,SH
CJNE A,#6,EXT MOV SH,#00H
INC SH
MOV A,SH
CJNE A,#6,EXT MOV SH,#00H
INC ML
MOV A,ML
CJNE A,#10,EXT MOV ML,#00H EXT:MOV TL0,#0AFH
MOV TH0,#3CH
POP PSW
POP ACC
RETI
DIS:MOV DPTR,#TAB
MOV A,SL
MOVC A,@A+DPTR MOV P2,A
CLR P0.2
MOV A,SH
MOVC A,@A+DPTR MOV P2,A
CLR P0.1
LCALL DEL
SETB P0.1
MOV A,ML
MOVC A,@A+DPTR
MOV P2,A
CLR P0.0
LCALL DEL
SETB P0.0
RET
TAB: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H
END
五参考文献:
1 郭文川.MCS-51单片机原理.接口及应用.电子工业出版社,2012年
2 宋文年.自动检测技术.北京:高等教育出版社,2004年
3 杨素行.模拟电子技术简明教程.北京:高等教育出版社,2003年
4 余孟尝.数字电子技术基础简明教程.北京:高等叫出版社
5 211TC中国电子网
6 万方数据资源统一服务系统
智能循迹小车 【摘要】 本课题是基于低功耗单片机的智能小车的设计与实现,小车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。小车系统以单片机为系统控制处器;采用红外传感获取赛道的信息,来对小车的方向和速度进行控制。此外,对整个控制软件进行设计和程序的编制以及程序的调试,并最终完成软件和硬件的融合,实现小车的预期功能。 一、实验目的 这次设计智能小车的目的是为了掌握电路设计的方法和技巧。如何将学习到的理论知识运用到实际当中去,怎样能够活学活用,深入的了解电子元器件的使用方法,了解各种元器件的基本用途和方法,能够灵活敏捷的判断电路中出现的故障,学会独立设计电路,积累更多的设计经验,加强焊接能力和技巧,完成基本的要求。并能完美的完成这次实训。 根据老师给的控制要求,和自己的发挥扩充能力,独立的,大胆的去实践,开拓创新,能够将自己的想法体现到实际电路当中去。 二、设计方案 该智能车采用红外传感器对赛道进行道路检测,单片机根据采集到的信号的不同状态判断小车当前状态,通过电机驱动芯片发出控制命令,控制电机的工作状态以实现对小车姿态的控制。 三、各芯片说明 W981216BH-6 一种髙速度同步动态随机存取存储器(SDRAM),具有1M 字(words) *4 层(banks)*16 位(bits)的存储结构组织.传输数据带宽最高达166M 字/秒(-6)。
对SDRAM是否访问是突发导向。在一个页面连续的内存位置可在一个1, 2, 4, 8或整页突发访问时长和行选择组由活动命令。列地址自动生成的SDRAM 的内部计数器在突发运作。随机栏也可以通过阅读在每个时钟周期提供其地址。该多组特性使交织在内部银行隐藏预充电时间。通过让一个可编程的模式寄存器,该系统可以改变突发长度,延时周期,交错或连续突发最大限度地发挥其性能。 W981216BH是在理想的主内存高性能应用。 特征: 1、.3V±0.3V电源 2、截至143 MHz时钟频率 3、2,097,152字×4层×16 位组织 4、自动刷新和自刷新 5、CAS 延时:2和3 6、突发长度:1, 2, 4, 8,和整页 7、突发读,写单人模式 8、自动预充电和预充电控制 9、4K刷新周期/ 64 ms TE28F160C3BD70(快闪记忆体)
沈阳航空工业学院 课程设计 (说明书) 课程名称汽车设计课程设计 专业机械设计制造及其自动化 班级 6406110 学号 200604061345 姓名刘大慧 指导教师王文竹
目录 1 汽车的总体设计- - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1 1.1汽车总体设计的特点- - - - - - - - - - - - - - - - - - - - - 1 1.2汽车总体设计的一般顺序- - - - - - - - - - - - - - - - -- - - 1 1.3布置形式- - - - - - - - - - - - - - - - -- - -- - - - - - - -3 1.4轴数的选择- - - - - - - - - - - - - - - - - - - - - - - - - - - - - -4 1.5 驱动形式的选择- - - - - - - - - - - - - - - - - - - - - - - - - -- -4 2 载货汽车主要技术参数的确定- - - - - - - - - - - - - - - - - - - - -- - -5 2.1汽车质量参数的确定- - - - - - - - - - - - - - - - - - - - - - - - 5 2.1.1汽车载荷质量的确定- - - - - - - - - - - - - - - - - - - - - - - 5 2.1.2整车整备质量的预估- - - - - - - - - - - - - - - - - - - - - - - 5 2.1.3汽车总质量的确定- - - - - - - - - - - - - - - - - - - - - - - - 5 2.1.4汽车轴数和驱动形式的确定- - - - - - - - - - - - - - - - - - - - 5 2.1.5汽车的轴荷分配- - - - - - - - - - - - - - - - - - - - - - - - - 5 2.2汽车主要尺寸的确定- - - - - - - - - - - - - - - - - - - - - - - - 6 2.2.1汽车轴距L确定- - - - - - - - - - - - - - - - - - - - - - - - - 6 2.2.2汽车的前后轮距B1和B2- - - - - - - - - - - - - - - - - - - - - 6 2.2.3汽车前悬Lf和后悬LR的确定- - - - - - - - - - - - - - - - -- - 6 2.2.4汽车的外廓尺寸- - - - - - - - - - - - - - - - - - - - - - - - - - 6 2.3汽车主要性能参数的确定- - - - - - - - - - - - - - - - - - - - - --- - 7 2.3.1汽车动力性参数的确定- - - - - - - - - - - - - - - - - - - - - 7 2.3.2汽车燃油经济性参数的确定 - - - - - - - - - - - - - - - - - - 7 2.3.3汽车通过性性参数的确定- - - - - - - - - - - - - - - - -- - 8 2.3.4汽车制动性参数的确定 - - - - - - - - - - - - - - - - - - - - 8 3载货汽车主要部件的选择和布置- - - - - - - - - - - - - - - - - - - - - - - 9 3.1发动机的选择与布置- - - - - - - - - - - - - - - - - - - - - - -- --- 9 3.1.1发动机型式的选择- - - - - - - - - - - - - - - - - - - - - -- -- 9 3.1.2发动机主要性能指标的选择- - - - - - - - - - - - - - - - - - -- 9
简单电子系统设计报告 ---------智能循迹小车 学号201009130102 年级10 学院理学院 专业电子信息科学与技术姓名马洪岳 指导教师刘怀强
摘要 本实验完成采用红外反射式传感器的自寻迹小车的设计与实现。采用与白色地面色差很大的黑色路线引导小车按照既定路线前进,在意外偏离引导线的情况下自动回位。 本设计采用单片机STC89C51作为小车检测、控制、时间显示核心,以实验室给定的车架为车体,两直流机为主驱动,附加相应的电源电路下载电路,显示电路构成整体电路。自动寻迹的功能采用红外传感器,通过检测高低电平将信号送给单片机,由单片机通过控制驱动芯片L298N驱动电动小车的电机,实现小车的动作。 关键词:STC89C51单片机;L298N;红外传感器;寻迹 一、设计目的 通过设计进一步掌握51单片机的应用,特别是在控制系统中的应用。进一步学习51单片机在系统中的控制功能,能够合理设计单片机的外围电路,并使之与单片机构成整个系统。 二、设计要求 该智能车采用红外传感器对赛道进行道路检测,单片机根据采集到的信号的不同状态判断小车当前状态,通过电机驱动芯片L298N发出控制命令,控制电机的工作状态以实现对小车姿态的控制,绕跑到行驶一周。 三、软硬件设计 硬件电路的设计 1、最小系统: 小车采用atmel公司的AT89C52单片机作为控制芯片,图1是其最小系统电路。主要包括:时钟电路、电源电路、复位电路。其中各个部分的功能如下: (1)、电源电路:给单片机提供5V电源。 (2)、复位电路:在电压达到正常值时给单片机一个复位信号。
图1 单片机最小系统原理图 2、电源电路设计: 模型车通过自身系统,采集赛道信息,获取自身速度信息,加以处理,由芯片给出指令控制其前进转向等动作,各部分都需要由电路支持,电源管理尤为重要。在本设计中,51单片机使用5V电源,电机及舵机使用5V电源。考虑到电源为电池组,额定电压为4.5V,实际充满电后电压则为4-4.5V,所以单片机及传感器模块采用最小系统模块稳压后的5V电源供电,舵机及电机直接由电池供电。 3、传感器电路: 光电寻线方案一般由多对红外收发管组成,通过检测接收到的反射光强,判断黑白线。原理图由红外对管和电压比较器两部分组成,红外对管输出的模拟电压通过电压比较器转换成数字电平输出到单片机。
单片机系统设计实例 红外遥控小车 专业:信息对抗技术 姓名:吴志飞 学号:1411050121 指导教师:张东阳
目录 1 绪论 (1) 2 系统分析 (2) 2.1系统框架 (2) 2.2电机驱动模块 (3) 2.3 LCD显示模块 (4) 3 系统硬件设计 (5) 3.1主控模块的电路设计 (6) 3.1.1AT89C51单片机的简介 (8) 3.1.2AT89C51管脚功能 (8) 3.2红外遥控模块的电路设计 (9) 3.2.1红外遥控的实现原理 (10) 3.2.2红外发射器 (11) 3.2.3红外接收器 (12) 3.3电机驱动模块的电路设计 (12) 3.4显示模块的电路设计 (13) 4 系统软件设计 (14) 4.1程序代码 (14) 4.2软件流程图 (17) 5 调试与仿真 (18) 5.1在keil中进行调试 (18) 5.2在Proteus中进行仿真 (19) 6 总结 (21) 参考文献 (22) I
沈阳理工大学课程设计说明书 1 绪论 随着计算机、微电子、信息技术的快速进步,智能化技术的开发速度越来越快,,智能化程度越来越高,应用范围也越来越广,包括海洋开发、宇宙探测、工农业生产、军事、社会服务、娱乐等各个领域。智能电动小车系统以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科。主要由路径识别、角度控制及车速控制等功能模块组成。同时,当今机器人技术发展的如火如荼,其在国防等众多领域的应用广泛开展。神五、神六升天、无人飞船等等无不得益于机器人技术的迅速发展。一些发达国家已把机器人制作比赛作为创新教育的战略性手段,参加者多数为学生,目的在于通过大赛全面培养学生的动手能力、创造能力、合作能力和进取精神,同时也普及智能机器人的知识。从某种意义上来说,机器人技术反映了一个国家综合技术实力的高低,而智能电动小车是机器人的雏形,它的控制系统的研制将有助于推动智能机器人控制系统的发展,同时为智能机器人的研制提供更有利的手段。 本次课设设计的红外遥控智能小车可以分为四大组成部分:红外遥控部分、显示部分、执行部分、控制部分。智能小车可以实现按遥控指示前行,后退,左转和右转。该设计主要通过对系统硬件电路的设计,软件设计和程序的编写,然后通过后期软硬件调试达到设计初衷。 1
课程报告 课程名称:嵌入式系统与应用项目名称:自动循迹小车院系:理学院 专业:自动化1401 学号:xxxxxxxxxxxxxxxxxxxxx 姓名:xxxxxxxx 指导导师:xxxxxxxx 2017年05月23日 西京学院理学院制
摘要 本次课程设计主要完成基于STM32F103微处理器的智能小车控制系统的系统设计。此智能小车系统的组成主要包括STM32F103控制器、电机驱动电路、红外探测电路。本次试验采用STM32F103微处理器为核心芯片,利用PWM技术对速度进行控制,循迹模块进行黑白检测,其他外围扩展电路实现系统整体功能。实现了智能小车能够自动跟踪地面上的黑色轨迹的任务。 关键字:STM32;红外探测;PWM;电机控制
Abstract This course design mainly completes the system design of intelligent car control system based on STM32F103 microprocessor. The composition of this intelligent car system mainly includes STM32F103 controller, motor drive circuit, infrared detection circuit. This test uses STM32F103 microprocessor as the core chip, the use of PWM technology to control the speed, tracking module for black and white detection, other peripheral expansion circuit to achieve the overall function of the system. To achieve the smart car can automatically track the black track on the ground task. Keywords:STM32;infrared detection;PWM;motor control
XX大学 汽车设计课程设计说明书设计题目:轿车转向系设计 学院:X X 学号:XXXXXXXX 姓名:XXX 指导老师:XXX 日期:201X年XX月XX日
汽车设计课程设计任务书 题目:轿车转向系设计 内容: 1.零件图1张 2.课程设计说明书1份 原始资料: 1.整车性能参数 驱动形式4 2前轮 轴距2471mm 轮距前/后1429/1422mm 整备质量1060kg 空载时前轴分配负荷60% 最高车速180km/h 最大爬坡度35% 制动距离(初速30km/h) 5.6m 最小转向直径11m 最大功率/转速74/5800kW/rpm 最大转矩/转速150/4000N·m/rpm 2.对转向系的基本要求 1)汽车转弯行驶时,全部车轮应绕顺时转向中心旋转; 2)操纵轻便,作用于转向盘上的转向力小于200N; 3)转向系的角传动比在15~20之间,正效率在60%以上,逆效率在50%以上;4)转向灵敏; 5)转向器和转向传动机构中应有间隙调整机构; 6)转向系应有能使驾驶员免遭或减轻伤害的防伤装置。
目录 序言 (4) 第一节转向系方案的选择 (4) 一、转向盘 (4) 二、转向轴 (5) 三、转向器 (6) 四、转向梯形 (6) 第二节齿轮齿条转向器的基本设计 (7) 一、齿轮齿条转向器的结构选择 (7) 二、齿轮齿条转向器的布置形式 (9) 三、设计目标参数及对应转向轮偏角计算 (9) 四、转向器参数选取与计算 (10) 五、齿轮轴结构设计 (12) 六、转向器材料 (13) 第三节齿轮齿条转向器数据校核 (13) 一、齿条强度校核 (13) 二、小齿轮强度校核 (15) 三、齿轮轴的强度校核 (18) 第四节转向梯形机构的设计 (21) 一、转向梯形机构尺寸的初步确定 (21) 二、断开式转向梯形机构横拉杆上断开点的确定 (24) 三、转向传动机构结构元件 (24) 第五节参考文献 (25)
南京工程学院 工程基础实验与训练中心 本科课程设计说明书(论文)题目:自动循迹小车 专业: 班级: 学号: 学生姓名: 指导教师: 起迄日期:2012.6.11~2012.7.6 设计地点:工程中心B208
目录 摘要: (4) Abstract (5) 一、系统方案 (6) 1、课设要求: (6) 1.1、完成基本设计功能: (6) 1.2、发挥部分 (6) 2、总体设计 (6) 3、模块方案比较与论证 (7) 3.1、电源模块: (7) 3.2、电机驱动模块: (7) 3.3、传感器模块: (9) 3.4、显示模块: (10) 3.5、测速模块 (12) 二、循迹小车硬件设计 (13) 1、机械设计 (13) 2、小车各模块分布 (13) 3、小车传感器位置排布 (13) 三、循迹小车软件设计 (14) 1、循迹小车主函数流程图 (14) 2、计算路程模块流程图 (14) 3、循迹模块流程图 (16)
四、程序 (18) 五、开发总结与心得 (18) 1、总体方案论证和确立 (18) 2、各分立模块的制作调试 (18) 3、总车的装配调试 (19) 4、总结与展望 (19) 六、参考文献 (19)
课程设计说明书(论文)中文摘要 摘要: 硬件设计:自动循迹小车控制器采用STC89C52单片机,采用LCD1602液晶显示屏显示当前小车速度和里程等数据;电机正反转采用L298N集成电路模块来驱动,也可以直接采用三极管组成桥式驱动电路来控制。里程检测传感器采用霍尔传感器或光电发射接收对管。跑道标志线采用光电发射接收对管检测并使用软件整形消抖措施,电源采用4节7号充电电池供电(在条件允许情况下单片机与电机可使用独立稳压电源供电)。 软件设计:主程序主要任务一方面扫描光电发射接收对管检测到的信号,然后判断小车转向;另一方面主程序还需要完成速度里程显示任务。采用外部中断0来实现小车速度检测,通过光电接收对管或霍尔传感器检测小车转速,小车每转动一周将会使传感器发出一中断申请信号;采用外部中断1来实现金属块检测,传感器选用接近开关,检测到金属后,接近开关将申请中断。 关键词:单片机液晶显示桥式驱动电路主程序
综合电子设计与实践 课程实验报告 课题名称:循迹小车的制作 班级:XXXXXX 实验者:XXXXXX 实验时间:XXXXX
摘要 本设计主要有三个模块包括信号检测模块、主控模块、电机驱动模块。信号检测模块采用红外光对管,用以对黑线进行检测。主控电路采用宏晶公司的8051核心的STC89C52单片机为控制芯片。电机驱动模块采用意法半导体的L298N专用电机驱动芯片,单片控制与传统分立元件电路相比,使整个系统有很好的稳定性。信号检测模块将采集到的路况信号传入STC89C52单片机,经单片机处理过后对L298N发出指令尽心相应的调整。小车速度由单片机输出的PWM波控制。控制电动小车的速度及转向,从而实现自动循迹的功能。 关键词:智能小车STC89C52单片机L298N 红外光对管 一.绪论 (一)智能小车的作用和意义 自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。随着科学技术的发展,机器人的感系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。视觉传感器的核心器件是摄像管或CCD,目前的CCD已能做到自动聚焦。但CCD传感器的价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉的系统中考虑使用接近觉传感器是觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。视觉的典型应用领域为自主式智能导航一种实用有效的方法。机器人要实现自动导引功能和避障功能就必须要感知导引线和障碍物,感知导引线相当给机器人一个视觉功能。避障控制系统是基于自动导引小车(A VG—auto-guide vehicle)系统,基于它的智能小车实现自动识别路线,判断并自动避开障碍,选择正确的行进路线。使用传感器感知路线和障碍并作出判断和相应的执行动作。该智能小车可以作为机器人的典型代表。它可以分为三大组成部分:传感器检测部分、CPU、执行部分。机器人要实现自动避障功能,还可以扩展循迹等功能,感知导引线和障碍物。可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。基于上述要求,传感检测部分考虑到小车一般不需要感知清晰的图像,只要求粗略感知即可,所以可以舍弃昂贵的CCD传感器而考虑使用价廉物美的红外反射式传感器来充当。智能小车的执行部分,是由直流电机来充当的,主要控制小车的行进方向和速度。单片机驱动直流电机一般有两种方案:第一,勿需占用单片机资源,直接选择有PWM功能的单片机,这样可以实现精确调速;第二,可以由软件模拟PWM输出调制,需要占用单片机资源,难以精确调速,但单片机型号的选择余地较大。考虑到实际情况,本文选择第二种方案。CPU使用STC89C52单片机,配合软件编程实现 (二)智能小车的现状 现智能小车发展很快,从智能玩具到其它各行业都有实质成果。其基本可实现循迹、避障、检测贴片、寻光入库、避崖等基本功能,这几节的电子设计大赛智能小车又在向声控系
题目: 智能小车设计 打开命令行终端的快捷方式: ctr+al+t:默认的路径在家目录 ctr+shift+n:默认的路径为上一次终端所处在的路径. linux@ubuntu:~$ linux:当前登录用户名. ubuntu:主机名 :和$之间:当前用户所处在的工作路径. windows下的工作路径如C:\Intel\Logs linux下的工作路径是:/.../..../ ~:代表的是/home/linux这个路径.(家目录). ls(list):列出当前路径下的文件名和目录名. ls -a(all):列出当前路径下的所有文件和目录名,包括了隐藏文件. .:当前路径 ..:上一级路径 ls -l:以横排的方式列出文件的详细信息 total 269464(当前这个路径总计所占空间的大小,单位是K) drwxr-xr-x 3 linux linux 4096 Dec 4 19:16 Desktop 第一个位置:代表的是文件的类型. linux系统下的文件类型有以下几种. b:块设备文件 c:字符设备文件 d:directory,目录 -:普通文件. l:连接文件. s:套接字文件. p:管道文件. rwxr-xr-x:权限 r:读权限-:没有相对应的权限 w:写权限
x:可执行权限 修改权限: chmod u-或者+r/w/x 文件名 chmod g-或者+r/w/x 文件名 chmod o-或者+r/w/x 文件名 第一组:用户权限 第二组:用户组的权限 第三组:其他用户的权限. chmod 三个数(权限) 文件名 首先根据你想要的权限生成二进制数,再根据二进制数转换成十进制的三位数 rwxr-x-wx 111101011 7 5 3 chmod 753 文件名 rwx--xr-x 第二个位置上的数字:对应目录下的子文件个数,如果是非目录,则数字是1 第三个位置:用户名(文件创造者). 第四个位置:用户组的名字(前边的用户所处在的用户组的名字). 第五个位置:对应文件所占的空间大小(单位为b) 第六~八个位置:Dec 4 19:16时间戳(最后一次修改文件的时间) 最后一个位置:文件名 操作文件: 1.创建一个普通文件:touch 文件名 2.删除一个文件:rm(remove) 文件名 3.新建一个目录:mkdir(make directory) 目录名 递归创建目录:mkdir -p 目录1/目录2/目录3 4.删除一个目录:rmdir 目录名.//仅删除一个空目录 rm -rf 目录名//删除一个非空目录 5.切换目录(change directory):cd 路径 linux下的路径分两种 相对路径:以.(当前路径)为起点. 绝对路径:以/(根目录)为起点, 用相对路径的方式进入Music:cd ./Music 用绝对路径的方式进入Desktop:cd /home/linux/Desktop 返回上一级:cd ..
西安交通大学 汽车设计课程设计说明书 载货汽车汽车动力总成匹配与总体设计 姓名: 班级: 学号: 专业名称: 指导老师: 日期:2104/12/1
题目: 设计一辆用于长途运输固体物料,载重质量20t 的重型货运汽车。 整车尺寸:11980mm×2465mm×3530mm 轴数:4;驱动型式:8×4;轴距:1950mm+4550mm+1350mm 额定载质量:20000kg 整备质量:11000kg 公路最高行驶速度:90km/h 最大爬坡度:大于30% 设计任务: 1) 查阅相关资料,根据题目特点,进行发动机、离合器、变速箱传动轴、 驱动桥、车轮匹配和选型; 2) 进行汽车动力性、经济性估算,实现整车的优化匹配; 3) 绘制车辆总体布置说明图; 4) 编写设计说明书。 本说明书将从整车主要目标参数的初步确定、传动系各总成的选型、整车性能计算、发动机与传动系部件的确定四部分来介绍本课程设计的设计过程。
1.整车主要目标参数的初步确定 1.1发动机的选择 1.1.1发动机的最大功率及转速的确定 汽车的动力性能在很大程度上取决于发动机的最大功率。设计要求该载货汽车的最高车速是90km/h ,那么发动机的最大功率应该大于等于以该车速行驶时的行驶阻力功率之和,即: )76140 3600( 1 3 max max max a D a a T e u A C u f g m P ?+??≥ η (1-1) 式中 max e P ——发动机最大功率,kW ; T η——传动系效率(包括变速器、传动轴万向节、主减速器的传动效率),参考传动部件传动效 率计算得:95%95%98%96%84.9%T η=???=,各传动部件的传动效率见表1-1; 表1-1传动系统各部件的传动效率 a m ——汽车总质量,a m =31 000kg (整备质量11 000kg,载重20 000kg ); g ——重力加速度,g =9.81m /s 2 ; f ——滚动阻力系数,由试验测得,在车速不大于100km/h 的情况下可认为是常数。轮胎结构、 充气压力对滚动阻力系数有较大影响,良好路面上常用轮胎滚动阻力系数见表1-2。取0.012f =。 表1-2良好路面上常用轮胎滚动阻力系数 D C ——空气阻力系数,取D C =0.9;一般中重型货车可取0.8~1.0;轻型货车或大客车0.6~0.8;
智能循迹小车设计与制作 课程设计报告 系别: 专业: 班级: 成员: 指导老师: 时间:二〇一一年6月30日
一、设计目的: 1、学会智能电子产品的功能设计与任务分析,能进行小型电子产品方案设计; 2、掌握基于51单片机、FPGA模数混合硬件系统设计和程序设计; 3、熟悉电子信息类企业项目完整的运作过程及管理规范,培养团队协作能力、沟通能力、创新能力和组织能力。 二、智能循迹小车任务分析 这是一种基于STC89C51单片机的小车寻迹系统。该系统采用两组高灵敏度的光电对管,对路面黑色(白色)轨迹进行检测,并利用单片机产生PWM波,控制小车速度。测试结果表明,该系统能够平稳跟踪给定的路径。 整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行 三、智能循迹小车循迹原理 该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。利用了简单、应用比较普遍的检测方法—发光二极管+光敏电阻。 发光二极管+光敏电阻,即利用光线在不同颜色的物理表面具有不同的反射性质的特点。在小车行驶过程中不断地向地面发射白光,当白光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
四、智能循迹小车总体方案 整个电路系统分为检测、控制、显示、驱动四个模块。首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,然后显示小车的运行状态,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。系统方案方框图如图1所示。 图1 智能小车寻迹系统框图 五、智能循迹小车各模块方案 1、循迹模块设计 方案1: 用红外发射管:接收管自己制作光电对管循迹传感器。红外发射管发出红外线,当发出的红外线照射到白色的平面后反射,若红外接收管能接收到反射回的光线则检测出白线继而输出低电平,若接收不到发射出的光线则测出黑线继而输出高电平。这样自己制作组装的寻迹传感器基本能够满足要求,但是工作不够稳定,且容易受外界光线的影响,因此我们放弃了这个方案。 方案2: 发光二极管+光敏电阻组成光敏探测器,光敏电阻的阻值可以根跟随周围 环境光线的变化而变化。当光线照射到白线上面时,光线发射强烈,光线照射
物理与电子信息系 课程设计报告 课程名称:单片机课程设计 题目:汽车尾灯的设计 学生姓名:李海标学号:11409321 学生姓名:唐凯学号:11409310 系部:物理与电子信息系 专业年级:电子信息工程专业2011级指导教师:余胜 职称:副教授 湖南人文科技学院物理与电子信息系制
目录 摘要.................................................................................................................................. - 1 - 1、设计课题任务、功能要求说明及总体方案介绍................................................................ - 2 - 1.1设计课题任务............................................................................................................... - 2 - 1.2功能要求说明............................................................................................................... - 2 - 1.3设计课题总体方案介绍及工作原理说明................................................................... - 2 - 1.3.1汽车尾灯的设计思路与频率计算................................................................... - 2 - 1.3.2AT89C51芯片介绍....................................................................................... - 3 - 2、设计课题硬件系统的设计.................................................................................................... - 6 - 2.1设计课题硬件系统各模块功能简要介绍................................................................... - 6 - 2.1.1复位电路........................................................................................................... - 6 - 2.1.2时钟振荡电路................................................................................................... - 7 - 2.1.3独立键盘电路................................................................................................... - 7 - 2.1.4 LED显示电路................................................................................................. - 8 - 2.2设计课题电路原理图、PCB 图、元器件清单.......................................................... - 9 - 2.2.1 原理图............................................................................................................ - 9 - 2.2.2 PCB图........................................................................................................... - 9 - 2.2.3 仿真图............................................................................................................ - 9 - 2.2.4 元器件清单.................................................................................................... - 9 - 3、设计课题软件系统的设计.................................................................................................... - 9 - 3.1设计课题使用单片机资源的情况............................................................................... - 9 - 3.1.1 键盘设定........................................................................................................ - 9 - 3.1.2 发光二级管显示设定.................................................................................. - 10 - 3.2设计课题软件系统程序流程框图............................................................................. - 10 - 3.2.1 主程序流程图................................................................................................ - 10 - 3.2.2键扫程序流程图............................................................................................. - 10 - 3.2.3延时程序流程图............................................................................................. - 11 - 3.2.4 显示程序流程图............................................................................................ - 12 - 3.3设计课题软件系统程序清单..................................................................................... - 13 - 4、仿真结果与误差分析 ......................................................................................................... - 14 - 4.1汽车尾灯控制电路的使用说明................................................................................. - 14 - 4.2汽车尾灯控制仿真结果............................................................................................. - 14 - 4.3硬件调试 .................................................................................................................... - 15 - 4.4设计体会 .................................................................................................................... - 15 - 致谢 ....................................................................................................................................... - 16 - 参考文献 ................................................................................................................................... - 17 - 附录 ....................................................................................................................................... - 18 - 一、原理图........................................................................................................................ - 19 - 二、PCB图 ........................................................................................................................ - 19 - 三、仿真电路图................................................................................................................ - 20 - 四、设计课题元器件清单................................................................................................ - 20 - 五、程序清单.................................................................................................................... - 22 -
目录 1.第一章绪论 1.1循迹小车的发展现状 1.2 选题意义 1.3本设计的工作 1.3.1设计要求 1.3.2设计思路 2.第二章硬件部分简介 2.1 具体方案论证与设计 2.2 主控芯片的简介 2.2.1 光电反射式传感器(ST178) 2.2.2低功率低失调双比较器LM393 3.第三章光电循迹小车的原理 3.1原理 3.2 传感器电路 3.2.1红外反射式光电传感器原理 3.2.2黑线检测电路
3.3核心控制电路 3.3.1模数转换电路(比较器电路) 3.3.2数字逻辑电路 3.4驱动电路 3.5 拓展功能“防撞” 3.6PCB制板 3.7作品展示 3.8原件清单 4.第四章结论 5.参考文献 6.课程设计心得
绪论 1.1循迹小车发展现状与趋势 智能汽车作为一种智能化的交通工具,体现了车辆工程、人工智能、自动控制、计算机等多个学科领域理论技术的交叉和综合,是未来汽车发展的趋势。寻迹小车可以看作是缩小化的智能汽车,它实现的基本功能是沿着指定轨道自动寻迹行驶。就目前智能小车发展趋势而言:相比价格昂贵、体积大、数据处理复杂
的传感器CCD反射式光电传感器以其价格适中、体积小、数据处理方便等更具有发展优势。 1.2 选题意义 汽车电子迅猛发展,智能车产生和不断探索并服务于人类的趋势将不可阻挡。智能车的研究将会给汽车这个产生了一百多年的交通工具带来巨大的科技变革。人们在行驶汽车时,不再只在乎它的速度和效率,更多是注重驾驶时的安全性,舒适性,环保节能性和智能性等。各国科学家和汽车工作人员以及汽车爱好者都在致力于智能车的研究,研究的成果有很多都已应用于人们的日常生活生产之中,例如在2005年1月美国发射的“勇气”号和“机遇”号火星探测器实质上都是装备先进的智能车辆。因此,研究智能车的实际意义和取得的价值都非常重大。本课题利用传感器识别路径,将赛道信息进行识别处理,利用主控芯片控制小车的行进进而完成循迹。 1.3本设计的工作 1.3.1设计要求 要求:设计并制作一个简易光电智能循迹电动车,其行驶路线示意图如图1-1:(其中粗黑些为光电寻迹线)要求智能循迹小车从起点出发,沿粗黑色引导线到达终点后立即停车但行驶全程行驶时间不能大于90s。
汽车设计——钢板弹簧课程设计 专业:车辆工程 教师:R老师 姓名:XXXXXX 学号:200XYYYY 2012 年7 月3 日
课程设计任务书 一、课程设计的性质、目的、题目和任务 本课程设计是我们在完成基础课、技术基础课和大部分专业课学习后的一个教学环节,是培养我们应用已学到的理论知识来解决实际工程问题的一次训练,并为毕业设计奠定基础。 1、课程设计的目的是: (1)进一步熟悉汽车设计理论教学内容; (2)培养我们理论联系实际的能力; (3)训练我们综合运用知识的能力以及分析问题、解决问题的能力。 2、设计题目: 设计载货汽车的纵置钢板弹簧 (1) 纵置钢板弹簧的已知参数 序号弹簧满载载荷静挠度伸直长度U型螺栓中心距有效长度 1 19800N 9.4cm 118cm 6cm 112cm 材料选用60Si2MnA ,弹性模量取E=2.1×105MPa 3、课程设计的任务: (1)由已知参数确定汽车悬架的其他主要参数; (2)计算悬架总成中主要零件的参数; (3)绘制悬架总成装配图。 二、课程设计的内容及工作量 根据所学的机械设计、汽车构造、汽车理论、汽车设计以及金属力学性能等课程,完成下述涉及内容: 1.学习汽车悬架设计的基本内容 2.选择、确定汽车悬架的主要参数 3.确定汽车悬架的结构 4.计算悬架总成中主要零件的参数 5.撰写设计说明书 6.绘制悬架总成装配图、零部件图共计1张A0。 设计要求: 1. 设计说明书 设计说明书是存档文件,是设计的理论计算依据。说明书的格式如下: (1)统一稿纸,正规书写; (2) 竖订横写,每页右侧画一竖线,留出25mm空白,在此空白内标出该页中所计算的主要数据; (3) 附图要清晰注上必要的符号和文字说明,不得潦草; 2. 说明书的内容及计算说明项目 (1)封面;(2)目录;(3)原始数据及资料;(4)对设计课题的分析;(5)汽车纵置钢板弹簧简图;(6)设计计算;(7)设计小结(设计特点及补充说明,鉴别比较分析,个人体会等);(8)参考文献。 3. 设计图纸 1)装配总图、零件图一张(0#);