SVPWM Generator (2-Level)
- 格式:pdf
- 大小:694.77 KB
- 文档页数:4
SVPWM的原理和法则推导和控制算法详细讲解SVPWM(Space Vector Pulse Width Modulation)是一种三相不对称多电平PWM调制技术。
其原理是将三相电压转换为空间矢量信号,通过调制的方式控制逆变器输出电压,以实现对三相电机的控制。
下面将详细介绍SVPWM的原理、法则推导以及控制算法。
一、原理:SVPWM的原理在于将三相电压分解为两相,即垂直于矢量且相互垂直的两个分量,直流坐标分量和交流坐标分量。
其中,直流坐标分量用于产生直流电压,交流坐标分量用于产生交流电压。
通过对直流和交流坐标的调制,可以生成所需的输出电压。
二、法则推导:1.将三相电压写成直流坐标系下的矢量形式:V_dc = V_d - 0.5 * V_a - 0.5 * V_bV_ac = sqrt(3) * (0.5 * V_a - 0.5 * V_b)2. 空间矢量信号通过电源电压和载波进行调制来生成输出电压。
其中,电源电压表示为空间矢量V。
根据配比原则,V_dc和V_ac分别表示空间矢量V沿直流和交流坐标的分量。
V = V_dc + V_ac3.根据法则推导,导出SVPWM的输出电压:V_u = 1/3 * (2 * V_dc + V_ac)V_v = 1/3 * (-V_dc + V_ac)V_w = 1/3 * (-V_dc - V_ac)三、控制算法:1. 设定目标矢量Vs,将其转换为直流坐标系分量V_dc和交流坐标系分量V_ac。
2.计算空间矢量的模长:V_m = sqrt(V_dc^2 + V_ac^2)3.计算空间矢量与各相电压矢量之间的夹角θ:θ = arctan(V_ac / V_dc)4.计算换向周期T和换相周期T1:T=(2*π*N)/ω_eT1=T/6其中,N为极对数,ω_e为电机的角速度。
5.根据目标矢量和夹角θ,确定目标矢量对应的扇区。
6.根据目标矢量和目标矢量对应的扇区,计算SVPWM的换相角度β和占空比:β=(2*π*N*θ)/3D_u = (V_m * cos(β) / V_dc) + 0.5D_v = (V_m * cos(β - (2 * π / 3)) / V_dc) + 0.5D_w=1-D_u-D_v以上步骤即为SVPWM的控制算法。
1. 空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U(t)就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= 可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c )上的投影就是对称的三相正弦量。
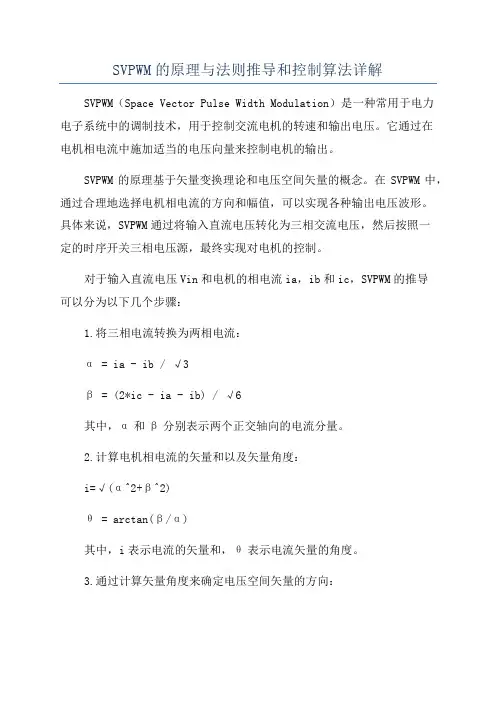
SVPWM的原理与法则推导和控制算法详解SVPWM(Space Vector Pulse Width Modulation)是一种常用于电力电子系统中的调制技术,用于控制交流电机的转速和输出电压。
它通过在电机相电流中施加适当的电压向量来控制电机的输出。
SVPWM的原理基于矢量变换理论和电压空间矢量的概念。
在SVPWM中,通过合理地选择电机相电流的方向和幅值,可以实现各种输出电压波形。
具体来说,SVPWM通过将输入直流电压转化为三相交流电压,然后按照一定的时序开关三相电压源,最终实现对电机的控制。
对于输入直流电压Vin和电机的相电流ia,ib和ic,SVPWM的推导可以分为以下几个步骤:1.将三相电流转换为两相电流:α = ia - ib / √3β = (2*ic - ia - ib) / √6其中,α和β分别表示两个正交轴向的电流分量。
2.计算电机相电流的矢量和以及矢量角度:i=√(α^2+β^2)θ = arctan(β/α)其中,i表示电流的矢量和,θ表示电流矢量的角度。
3.通过计算矢量角度来确定电压空间矢量的方向:根据电流矢量角度的范围,将电流矢量所在的区域划分为6个扇区(S1-S6),每个扇区对应一个电压空间矢量的方向。
4.计算电压空间矢量的幅值:根据电流矢量的大小,计算得出在相应扇区内的电压空间矢量的幅值。
5.根据电压空间矢量的方向和幅值,计算各相电压的占空比:根据电压空间矢量的方向和幅值,可以得出控制电机的各相电压的占空比。
1.读取电机的输入参数,包括电流、速度和位置信号。
2.根据输入参数计算出电机相电流的矢量和和矢量角度。
3.根据矢量角度确定电压空间矢量的方向。
4.根据矢量角度和矢量幅值计算电压空间矢量的幅值。
5.根据电压空间矢量的方向和幅值,计算出各相电压的占空比。
6.将占空比参考信号与电机的PWM生成模块相结合,通过逆变器将控制信号转化为交流电压,并驱动电机运行。
7.循环执行以上步骤,并实时调整占空比,以实现对电机速度和输出电压的精确控制。
svpwm工作原理一、引言随着电力电子技术的不断发展,交流电机控制技术也得到了广泛应用。
其中,空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)技术是一种常用的交流电机控制方法。
本文将详细介绍SVPWM的工作原理及其在交流电机控制中的应用。
二、SVPWM原理2.1 基本原理SVPWM是一种通过控制电压的矢量合成,实现对交流电机输出电压和频率的调节的方法。
它通过将三相交流电压分解为两个正交轴上的分量,实现对电机的精确控制。
SVPWM的基本原理可以概括为以下几个步骤:1.将三相交流电压转换为αβ坐标系下的矢量;2.根据所需输出电压的大小和相位,计算出指定的矢量;3.将指定的矢量转换为三相交流电压;4.通过调节矢量的大小和相位,控制电机输出电压和频率。
2.2 SVPWM的工作过程SVPWM的工作过程可以分为两个阶段:矢量选择和矢量合成。
2.2.1 矢量选择在矢量选择阶段,根据所需输出电压的大小和相位,选择合适的矢量。
一般情况下,矢量选择可分为以下几个步骤:1.根据所需输出电压的大小,确定电压矢量的幅值;2.根据所需输出电压的相位,确定电压矢量的角度;3.根据电压矢量的幅值和角度,计算出对应的αβ坐标系下的矢量。
2.2.2 矢量合成在矢量合成阶段,将选择好的矢量转换为三相交流电压输出。
矢量合成的具体步骤如下:1.将选择好的矢量转换为三相交流电压;2.根据矢量的大小和相位,计算出对应的PWM波形;3.将PWM波形与三相交流电压进行合成;4.输出合成后的三相交流电压。
三、SVPWM在交流电机控制中的应用SVPWM作为一种高效可靠的交流电机控制技术,广泛应用于各种类型的交流电机控制系统中。
以下是SVPWM在交流电机控制中的几个应用:3.1 速度控制SVPWM可以通过控制输出电压的大小和频率,实现对交流电机的速度控制。
通过调节矢量的幅值和相位,可以实现电机的平稳启动、加速、减速和停止等功能。
SVPWM的原理及法则推导和控制算法详解Space Vector Pulse Width Modulation(SVPWM)是一种用于交流电机驱动的调制技术。
它的原理是将固定电压向量分解为两个可控向量,通过改变这两个向量的占空比来控制交流电机的输出。
SVPWM利用矢量图法将三相交流电源的空间矢量变换为两相旋转矢量,从而实现对交流电机驱动电压的控制。
1.假设存在一个以0为中心的静止坐标系,其中电源相电压为Va,Vb,Vc。
我们可以将这三个电压写成以时间为函数的形式,即Va(t),Vb(t),Vc(t)。
2.将Va,Vb,Vc投影到α-β坐标系,得到α轴上的电压Vaα(t),Vbα(t),Vcα(t)和β轴上的电压Vaβ(t),Vbβ(t),Vcβ(t)。
3. 将α-β坐标系反转回静止坐标系,得到参考电压Va_ref(t), Vb_ref(t), Vc_ref(t)。
4.将参考电压投影到空间矢量图上,从而得到交流电机的输入矢量。
5.根据参考电压和输入矢量之间的关系,推导出控制算法。
1.基于所需输出电压的矢量长度和角度,计算矢量图中的两个矢量的占空比,分别为d1和d22.根据矢量长度和角度,计算三个相电压的占空比,分别为d_a,d_b,d_c。
3.根据SVPWM的特性,当d1,d2为0时,输出电压为0;当d1,d2相等时,输出电压处于峰值;当d1和d2不相等时,输出电压的大小和方向都有所改变。
因此,通过改变d1和d2的数值,可以改变输出电压的大小和方向。
4.根据d_a,d_b,d_c和d1,d2的数值,计算出PWM控制信号。
5.将PWM控制信号施加到交流电机驱动电路中,从而实现对输出电压的控制。
总结起来,SVPWM通过将固定电压向量分解为两个可控向量,通过改变这两个向量的占空比来控制交流电机的输出。
通过合理推导和计算,可以得到控制算法,从而实现对输出电压的精确控制。
SVPWM是一种高效且精确的交流电机驱动技术,被广泛应用于工业控制中。
SVPWM的原理讲解以及应用过程中的推导与计算SVPWM(空间矢量调制技术),是一种电机调速技术,通过在三相电流中引入一个辅助电流,将三相电流分解为一个基础正弦波电流和一个辅助电流,然后根据基础正弦波电流和辅助电流的大小和相位关系,控制电机输出的磁场方向和大小。
SVPWM可以提高电机的效率和控制精度,并减小电机的振动和噪音。
1.电机模型分析:首先,对电机进行建模和分析。
通过将电机抽象为一个旋转矢量图,分析电机的磁场分布和电流控制。
2.空间矢量图:根据电机模型分析,可以得到电机的矢量图。
矢量图用于描述电机的磁场方向和大小,有助于理解电机的运行原理。
3.矢量控制:根据矢量图,可以控制电机的磁场方向和大小。
通过控制电流矢量的大小和相位关系,可以控制电机的输出磁场。
4.空间矢量调制:SVPWM通过将电流矢量分解为一个基础正弦波电流和一个辅助电流,再根据它们的大小和相位关系,控制电机的输出磁场。
辅助电流可以用来改变电机的输出磁场方向,基础正弦波电流用来控制电机的输出磁场大小。
5.SVPWM计算:为了实现SVPWM,需要对电流进行计算和控制。
首先,根据需要的输出磁场向量,计算出对应的辅助电流和基础正弦波电流。
然后,根据电机的控制策略,计算出实际的电流指令。
在计算辅助电流和基础正弦波电流时,可以采用矢量旋转和空间矢量分解的方法。
通过将输出磁场向量进行数学运算和变换,可以得到电流矢量的大小和相位。
具体的计算过程可以按照以下步骤进行:1.确定需要的输出磁场向量的大小和相位。
2.将输出磁场向量进行矢量旋转和变换,得到一个新的矢量。
矢量旋转和变换的具体方法可以根据电机的控制策略和转子位置来确定。
3.将新的矢量分解为一个基础正弦波电流和一个辅助电流。
辅助电流用于改变输出磁场的方向,基础正弦波电流用于控制输出磁场的大小。
4.根据基础正弦波电流和辅助电流的大小和相位关系,计算出实际的电流指令。
根据电机的控制策略,可以使用速度环、电流环等控制器来计算输出的电流指令。
S V P W M的原理及法则推导和控制算法详解Last revision date: 13 December 2020.1 空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
SPWM 通过控制开关器件的关断得到正弦的输入电压;SVPWM 的控制目标在于如何获得一个圆形的旋转磁场。
之所以成为矢量控制,是因为通过SVPWM 对晶闸管导通的控制可以得到一系列大小和方向可变的空间电压矢量,通过对空间电压矢量进行控制,从而得到圆形旋转磁场。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。