论雷达技术的发展与应用及 未来展望 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
论雷达技术的发展与应用及未来展望 摘要:雷达是用无线电的方法发现目标并测定它们的空间位置的装置。雷达的发展与使用过程,正是电子技术在军事中应用的缩影,而雷达的未来,更与电子技术息息相关。本文介绍了雷达的发展与应用的历史,重点介绍了相控阵雷达与激光孔径雷达两类雷达的原理与特点,并指出雷达的弱点及未来发展方向关键词:雷达;发展;实战应用;种类;弱点;未来
雷达主要用于对远距离物体的方位、距离、高度做精确检测,可以说是现代军事电子技术的代表。随着不断的发展,雷达在战区的警戒、各种新式武器威力的发挥、协同作战的指挥中的地位愈发重要。 1雷达的发展与应用 雷达的基本工作原理是靠发射探测脉冲和接受被照射目标的回波发现目标。百年的时间里,随着新技术的发展和应用,雷达也在不断发展。 1.1雷达的发展史 下面是雷达出现前夜相关理论的一系列突破: 1842年多普勒(Christian Andreas Doppler)率先提出利用多普勒效应的多普勒式雷达。 1864年马克斯威尔(James Clerk Maxwell)推导出可计算电磁波特性的公式。 1886年赫兹(Heinerich Hertz)展开研究无线电波的一系列实验。 1888年赫兹成功利用仪器产生无线电波。 1897年汤普森(JJ Thompson)展开对真空管内阴极射线的研究。 这些与电磁波相关的科技是雷达的最基本理论。1904年克里斯蒂安?豪斯梅耶(Christian Hulsmeyer)宣称他的“电动镜”可以传输音频,并能够接受到运动物体的回应。可以说,就是这位德国人奠定了这项技术。然而,在一战期间,德国军官们所注意的是无线电通讯。 接下来雷达的出现就显得顺理成章了。1933年,鲁道夫?昆德(Rudolf Kunhold)提出毫米波长可能可以探测出水面船只及飞船的位置。两年后,威廉?龙格(Wilhelm Runge)已经能够根据飞机自身所发出的信号计算出50公里以外的飞机位置所在,即使是在夜晚或者有雾的时候。 第二次世界大战中的不列颠战役成为雷达正式登场的舞台。法国的迅速陷落,使希特勒有理由相信只需通过空袭便能征服英国。在这一大规模的空战中,纳粹德国空军拥有的飞机数量远远超过了英国皇家空军——2670架对1475架。而英国在雷达方面有优势。1936年1月英国W.瓦特在索夫克海岸架起了英国第一个雷达站。1938年,为保卫英格兰,用七部雷达组成"Chain Home"雷达网,雷达频率30兆赫。雷达网使德国轰炸机还没到达英吉利海峡即被发现,英国也因此取得了英伦空战的胜利。这场胜利也是第二次世界大战中较大的转折点之一。 之后四十年人们更加意识到雷达的重要作用,雷达也因此得到了不断发展,也分出了不同种类。本节余下部分将有选择地概括各个年代的重大进展。 1.1.1四十年代 四十年代初期(在二次大战期间),由于英国发明了谐振腔式磁控管,从而在先驱的VHF雷达发展的同时,产生了微波雷达发展的可能性。它开拓了发展L波段(23q厘米波长)和S波段(10厘米波长)大型地面对空搜索雷达和X波段(3厘米波长)小型机载雷达的美好前景。1941年苏联最早在飞机上装备预警雷达。两年后美国麻省理工学院研制出机载雷达平面位置指示器,预警雷达。时至今日,雷达已成为各式飞机不可缺少的组成部分,是实施精确打击和自身防护的必要手段。 1.1.2五十年代
点光源跟踪系统 目录 1.【摘要】 (1) 2.系统整体方案确立 (2) 3.方案设计论证与比较 (2) 3.1方案设计 (2) 3.2方案论证与比较 (2) 3.2.1控制核心的选择与比较 (2) 3.2.2恒流源的选择与比较 (3) 3.2.3光敏器件的选择与比较 (3) 4.系统的建立 (4) 4.1系统构建框图 (4) 4.2硬件电路的制作 (4) 4.2.1可调恒流源电路 (4) 4.2.2光源检测电路 (5) 4.2.3 msp430最小系统 (6) 4.2.4 JS-8580-V6C驱动步进电机模 (6) 4.3程序设计 (7) 4.3.1程序系统框图 (7) 4.3.2程序代码 (8) 5.系统调试 (9) 5.1调试仪器 (9) 5.2调试结果 (9) 5.2.1 恒流源数据测试 (9) 5.2.2系统测试 (10)
点光源跟踪系统 1.【摘要】 本系统设计是由MSP430F149单片机为控制核心,由恒流源控制1w的大功率LED做点动光源。以光敏电阻作为光源检测传感器,用步进电机来自由转动带动激光笔跟踪点光源的自动跟踪系统. 该系统由430单片机最小系统、点光源检测、步进电机驱动等电路组成,利用三个光敏电阻实现点光源强度和移动方向的检测,通过信号放大和处理,送入单片机内部电路,单片机将采样结果进行分析和处理,控制步进电机运转的步距和方向,从而达到点光源的精确跟踪。 关键词:MSP430;恒流源;步进电机;光敏电阻。
点光源跟踪系统 2.系统整体方案确立 作品以1w白光LED作为光源,固定在一支架上,且LED的电流可调范围为150mA到350mA,在一定的角度,范围内移动支架,确保跟踪系统中的指向激光笔可以尽快的指向光源。 3.方案设计论证与比较 3.1方案设计 由于要以1w的白光LED作为光源,且电流调节范围有限制,所以需要选择一个好的恒流源达到要求,其次在感光系统中,要做到精准的跟踪和定位光源,因此光电传感器的选择也很重要。在这两者的设计中,有以下几种方案。 3.2方案论证与比较 3.2.1控制核心的选择与比较 方案一:采用MSP430 MSP430是TI公司生产的16位超低功耗的混合信号处理器。集模拟电路、数字电路和微处理器于一体,具有方便高速的运算能力和丰富的功能模块,低电源电压范围为1.8-3.6V,还具有灵活的时钟适用范围。 方案二:采用89c51 89C51单片机是由ATMEL高密度非易失存储器制造技术制造的一种带4K字节闪烁可编程可擦除只读存储器的低电压,高性能CMOS8位微处理器,8位CPU 和闪烁存储器组合在单个芯片中,是一种高效微控制器。 方案三:采用AVR AVR单片机是由ATMEL公司研发出的增强型内置Flash的RISC精简指令集高速8位单片机。具有运算速度快,性价比高,工作电压范围宽(2.7-6V),和抗干扰能力强等优点。 比较以上三种方案,由于对MSP430比较熟悉,因此选择方案一。
光伏并网控制系统的最大功率点跟踪(MPPT)方法 2011年12月29日作者:周建华李冰郭玲田苗苗陈增禄来源:《中国电源博览》总第128期编辑:孙伟 摘要:最大功率点跟踪(MPPT)是光伏并网逆变器控制策略中的核心技术之一。本文首先介绍了光伏组件的输出特性,然后具体分析了3种典型的MPPT控制方法,并总结3种方法各自的特点和不足。 1 引言 日本福岛核电站事故之后,多国陆续宣布暂停核电建设,而太阳能是永不枯竭的清洁能源,并且更加稳定、安全。据国家权威数据,在“十二五”期间,中国光伏发电装机容量达到2000万千瓦。但由于光伏组件本身特性的非线性,受环境温度、日照强度、负载等因素的影响,均会使其输出最大功率点发生变化,导致光伏组件转换效率很低。而所有光伏发电系统均希望光伏组件在相同日照、温度条件下输出尽可大的功率,这就提出了对光伏组件最大功率点跟踪(Maximum Power Point Tracking,MPPT)的问题。本文首先讨论了光伏组件本身的P-V,I-V特性,以及温度、光照的影响;然后具体分析了几种常用的MPPT控制方法,并对3种MPPT控制方法作简单的比较。 2 光伏组件的特性 A. 物理数学模型 根据半导体物理学理论,太阳能组件的等效物理模型如图1所示。 其中: IPH 与日照强度成正比的光生电流; I0 光伏组件反向饱和电流,通常其数量级为10-4A;
n 二极管因子; q 电子电荷,; K 玻尔兹曼常数, J/K; T绝对温度(K); RS光伏组件等效串联电阻; RP光伏组件等效并联电阻; 式(1)中参数IPH、Io、Rs、RP、n与太阳辐射强度和组件温度有关,而且确定这些参数也十分困难。 B. 温度、光照对输出特性的影响 受外界因素(温度、光照强度等)影响,光伏组件输出具有明显的非线性,图2、图3分别给出其I-V特性曲线和P-V特性曲线。 由以上两图可知,光伏组件的输出短路电流(Isc)、最大功率点电流(Im)随光照强度的增强而增大。光照强度的变化对组件开路电压影响不大,最大功率点电压(Um)变化也不大,如图3-A所示。温度对光伏组件的输出电流影响不大,短路电流(Isc)随温度升高而略微增加。但开路电压(Uoc)受温度影响较大,开路电压随温度升高近似线性地下降,因此温度对光伏组件最大输出功率有明显影响,从图2-B曲线的峰值变化可以看出。
摘要:本设计以TI的LM3S1138处理器为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统,当LED光源在圆弧或直线上运动时,检测模块检测信号后经过放大滤波送入LM3S1138进行处理,用电机驱动模块控制检测模块在水平和竖直方向上的旋转使激光笔指示光源位置,即实现点光源跟踪。系统主要由四个模块构成:LED驱动模块、检测及其转换模块、LM3S1138处理模块和电机控制模块。其中用TPS61087驱动LED,光敏三极管检测光照强度,由两个步进电机分别控制激光笔水平和竖直方向上的旋转。 关键字:LM3S1138 TPS61087 光敏三极管步进电机激光笔点光源跟踪 一系统方案 根据题目的要求,设计任务是通过使用光敏器件检测光照强度来判断光源的位置并用激光笔指示光源的位置。为了完成上述功能,将整个系统设计为两个模块,点光源模块和指示光源模块。整个系统的总体框图如图1-1所示:
图1-1 系统总体框图 1.1 LED驱动模块方案选择与论证 方案一:采用LM317做LED驱动模块。LM317是三端可调正稳压器集成电路,它的输出电压X围是1.2V至37V,负载电流最大为1.5A。由LM317构成的驱动电路简单,但功耗较大,而且要注意散热问题。 方案二:采用TPS61087做LED驱动模块。TPS61087是具有强制PWM模式的650kHz/1.2MHz升压DC-DC转换器,输入电压X围为2.5~6V,输出电压可高达18.5V。采用TPS61087的驱动电路的输出电流可达500mA以上,足够用来驱动150~350mAX围的白光LED。因此本设计采用方案二。 1.2 光敏传感器的选择与论证 方案一:采用光敏电阻检测光照强度。它在强光照射下光电转换线性较差,频率响应很低。 方案二:采用光敏二极管检测光照强度。当反向电流增大时,但容易受温度变化的影响。
有源相控阵雷达的发展 机载有源相控阵雷达的发展水平以美国最为先进。在20世纪60年代末即研制出有604个单元的X波段有源阵列天线。在1988年到1991年完成了配装F22战斗机的AN/APG-77雷达的飞行试验,该雷达有2000个T/R组件,对雷达反射面积为1平方米的目标,探测距离设计要求为120—220KM。综合了探测、敌我识别、电子侦察和电子干扰等多种功能于一体,具有低截获概率(也就是说不易被对方雷达告警器发现)。可以说美国在机载有源相控阵火控雷达技术上已经比较成熟。除了APG-77雷达以外,美国还在原有的PD雷达上进行改进,换装相控阵天线,例如计划给F18E战斗机换装APG79雷达和给F15换装的APG63(V)3雷达等除此之外,英、法、德三国联合研制机载固态多功能有源相控阵雷达,2001年已经完成具有1200个T/R组件的全尺寸样机的试验工作,但是离实用化还有一定的距离。 前苏联在八十年代初即研制出无源相控阵雷达,装备于米格31战斗机上,搜索距离200千米,对战斗机的跟踪距离达到90千米以上,可以同时跟踪10个目标并攻击其中的4个,这在当时已经是比较先进的了。目前俄罗斯正在努力发展有源相控阵雷达,但离实用化也有很大的距离。 目前世界上另一种装机实用化的有源相控阵雷达为日本F-2战斗机所采用的火控雷达,这反映了日本在电子工业上的技术实力。该雷达包含800个T/R 组件,公开的探测距离为80KM(中等战斗机目标)。如果这个数据属实的话,则说明日本虽然在半导体生产技术上比较先进,但是在雷达系统设计上的能力仍嫌不足。 我国从六十年代开始即开展相控阵技术的研究,并于七十年代研制成功7010大型远程相控阵雷达,曾出色的完成了观测美国天空试验室和苏联核动力卫星殒落任务,引起世界重视(相关资料可查阅中国科学技术协会网站文章)。在九十年代又研制出YLC-2全固态相控阵远程警戒雷达(第二届中国国际国防电子展览会上展出)。这些成果都反映了我国在相控阵雷达研制上的进步。不过,相对于一些陆基和舰载的大型雷达来说,机载相控阵雷达的技术难度要大得多,主要难度又集中在小体积T/R组件的研制上。据介绍,607所和电子部14所在机载相控阵雷达的研制上处于国内领先地位,目前,相控阵雷达的数据处理部分已经比较成熟,但是在T/R组件的生产,尤其是成本控制上仍然有相当大的差距。据顾诵芬院士在前不久的介绍,国内目前单个T/R组件的生产成本要达到数万人民币,这样,光雷达天线的造价就已经是天价了,而美国目前已经将T/R组件的生产成本控制在四五百美元以下,因此我们的差距还是相当大的。对比美国的发展历程,我们要研制出AN/APG-77级别的雷达,可能要到2010年以后。相对来说,无源相控阵雷达的技术难度要小得多,因此在研制出实用的有源相控阵雷达之前,完全有可能采用无源相控阵雷达作为过渡产品。而且,即使有源相控阵雷达研制成功以后,无源相控阵雷达作为一种低端产品,仍然具有很大的使用价值。 我国在航空电子产品上起步晚,发展慢,一度和西方先进国家的差距拉得
点光源跟踪系 组员:陈红芳韩思宇代金龙马文鹏徐伟杰陈国陆 摘要:本文设计的是一个点光源跟踪系统,主要由光敏电阻检测,运放分析处理,执行机构运行,这几个部分构成。整个系统是以LM358P 为控制核心,通过4个光敏电阻来检测光照,依据光照强度的变化、大小来判断出点光源的位置与运动趋势,并将点光源运动分解为水平和竖直方向的二维运动,借以来控制水平电机与竖直电机的旋转角度,以达到跟踪光源的效果。 关键词:点光源定位,二维运动分析,LM3S1138 一、系统方案设计与论证 1.主控芯片 根据本题的要求,整个系统中必须要有一个主控芯片来处理数据和控制操作,主要考虑以下两种方案: 方案一:MSP430系列单片机。16位低功耗单片机,性能良好。 方案二:Cortex-M3系列。具有32位处理器内核的高性能处理器,具有强大的控制、处理能力,丰富的外围模块,稳定的系统,提供方便高效的开发环境。 本系统选取Cortex-M3系列的LM3S1138作为控制器,LM3S1138支持低功耗模式,性能稳定,内置嵌套向量中断控制器,在控制、处理数据速度上有优势,并含有丰富的外围模块,所以选择方案二。 2.传感器的选择 本系统的传感器主要是检测光照度,可考虑的传感器如下列方案: 方案一:光敏电阻。从光照特性来看,随着光照强度的增加,光敏电阻的阻值开始迅速下降,可以反映光照的变化,但该特性大多数情况为非线性,部分光照区间内,特性变化不灵敏。 方案二:硅光电池。硅光电池是一种直接把光能转换为电能的半导体器件,根据硅光电池光照强度曲线特性可知,硅光电池的开路电压或短路电流与光强成很好的线性关系。 方案三:光敏二极管。光敏二极管具有单向导电性,无光照时,有很小的暗电流,当受到光照时,光电流随射光强度的变化而变化。 方案四:光敏三极管。原理与光敏二极管相同,但是与光敏二极管相比,它具有很大的光电流放大作用,即很高的灵敏度,因此传感器选择方案四。 3.电机的选择 电机的主要作用是调整激光笔的位置,指向点光源,可选取的类型如下方案:
课程设计报告 课程 题目 学院 年级专业 班级学号 学生姓名 指导教师 设计时间
目录 一、摘要 (3) 二、绪论 (3) 三、内容 (3) 2.1光伏电池的特性 (3) 2.2 MPPT基本原理 (4) 2.3 MPPT控制的实现 (5) 2.3.1控制算法 (5) 2.3.2硬件实现 (6) 2.3.3 软件实现 (7) 2.4实验结果分析 (7) 四、结论 (8) 五、参考文献 (8)
一、摘要 太阳能光伏阵列的输出特性受外界环境的影响具有强烈的非线性,为了提高系统的整体效率,一个重要的途径就是实时调整光伏电池的工作点,进行最大功率点跟踪(MPPT),使之始终工作在最大功率点附近。本文通过对太阳能电池伏安特性的分析,采用自适应扰动观察算法,基于TMS320F2812设计了MPPT控制系统。实验结果表明,在此算法控制下,系统能够准确地跟踪最大功率点。 二、绪论 随着经济全球化进程的不断加速和工业经济的迅猛发展,能源问题已成为人类需要迫切解决的问题,大力发展新的可替代能源已成为当务之急。太阳能是一种取之不尽用之不竭的绿色能源,太阳能发电具有充分的清洁性、绝对的安全性、资源的相对广泛性和充足性、长寿性及维护性等其它常规能源所不具备的优点。光伏发电虽然具有以上的优势,但是实际应用中还存在很多的问题。光伏发电的主要缺点之一是太阳能电池阵列的光电转换效率太低。为了解决该问题,一个重要的途径就是实时调整光伏电池的工作点,进行最大功率点跟踪(MPPT),使之始终工作在最大功率点附近。目前,光伏系统的最大功率点跟踪问题已成为学术界研究的热点。 高性能的数字信号处理芯片(DSP)的出现,使得一些先进的控制策略应用于光伏发电控制系统成为可能。本论文就是在此背景下,采用TI公司生产的TMS320F2812进行控制,开展了太阳能发电系统的理论和试验研究,具有重要的现实意义。 三、内容 2.1光伏电池的特性 太阳能电池的输出特性是非线性的,它受到光照强度、环境温度等因素的影响。太阳能电池的等效电路如图1所示,图2是光伏电池在不同温度下的I-V、P-V特性,图3为光伏电池在不同日照强度下的I-V、P-V特性。[1][4][7]
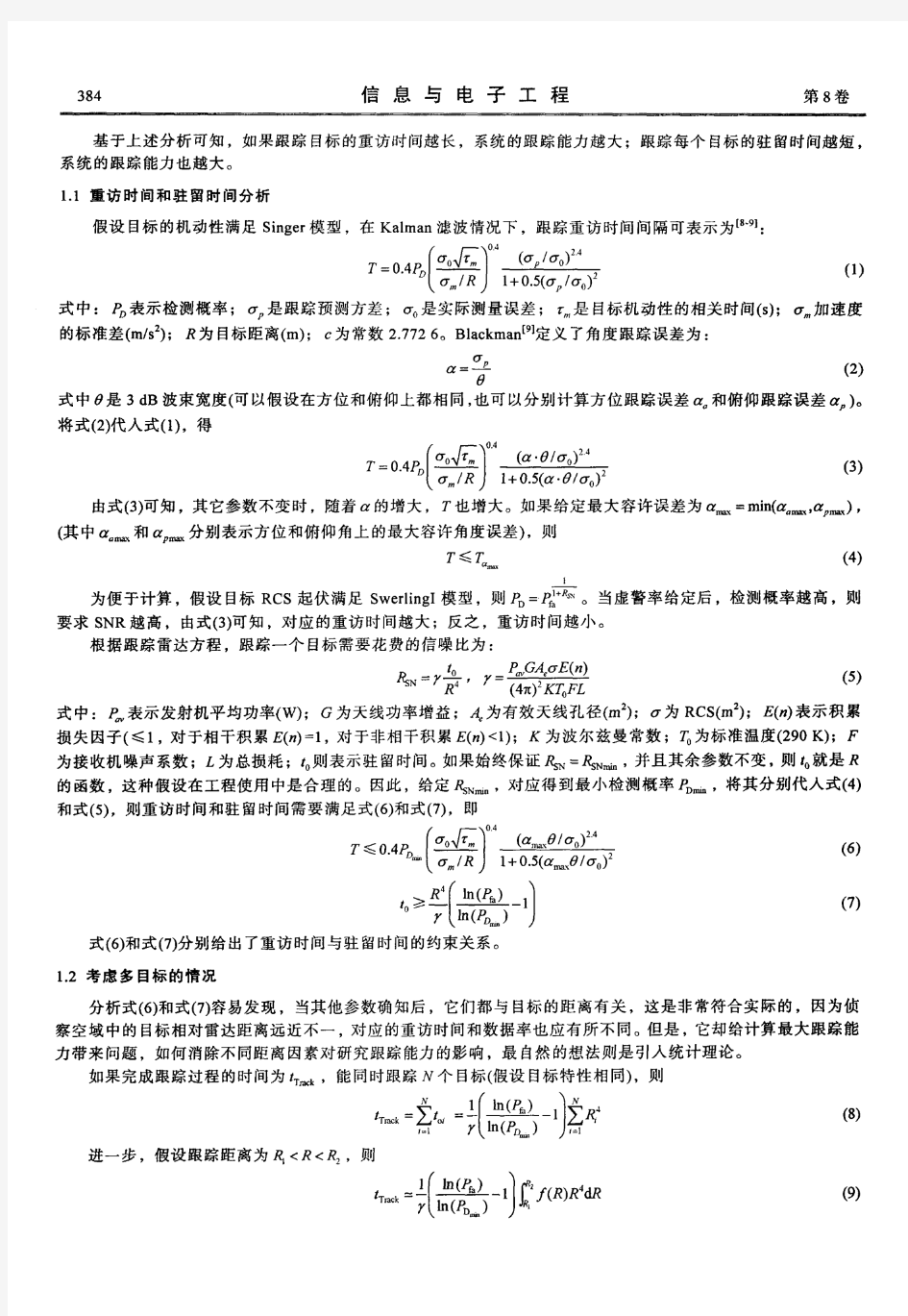
相控阵雷达之弊端 舰载多功能相控阵雷达是舰载雷达的一个主要发展方向,具有探测目标精度高、抗干扰能力强、可靠性高、隐身性能好等诸多优点。相控阵雷达采用电子稳定平台,通过自适应调度雷达时间和能量资源,改变天线表面阵列所发出波束的合成方式来改变波束扫描方向,可同时完成搜索警戒、精确跟踪、目标敌我识别、导弹制导、目标引导等多种功能。相控阵雷达使用电子扫描方式,通过改变频率或者是改变相位的方式,将合成的波束发射的方向加以变化。电子扫描扫描速率高、改变波束方向的速率快、对于目标测量精确度高于机械扫描雷达。目前,中、美、日、俄、法、意、德、英等国家都装备或正在研制相控阵雷达,其中较为著名的有中国装备于052C导弹驱逐舰和“辽宁”号航空母舰上的346相控阵雷达和装备于052D型导弹驱逐舰上的346A型相控阵雷达;美国装备于阿利?伯克级驱逐舰上的SPY-1系列相控阵雷达;日本海军装备在“日向”级“护卫舰”上的FCS-3型相控阵雷达等。多功能相控阵雷达虽然有着诸多的优点,但其与任何武器装备一样,有其利也有其弊。从造价上来说,相控阵雷达的造价普遍偏高,往往是普通雷达的数十倍乃至数百倍,这使得多功能相控阵雷达一般只能装备在一些高端主战舰艇上;从适装舰艇方面来说,由于多功能相控
阵雷达的重量一般较重而体积较大,故此,只能装备于大型舰艇上。从能耗上来说,多功能相控阵雷达的功率较大,长时间开机对舰艇上宝贵的能源资源耗费厉害。在性能上,多功能相控阵雷达也有一些不足之处,如对杂波特别是海杂波抑制能力不足、探测隐身目标能力不足、在对抗自卫式噪声干扰能力不足、探测低空及掠海目标能力不足、在强杂波背景时性能下降等。舰载多功能相控阵雷达既有预警雷达的远程警戒能力,又具有火控雷达的高精度。其警戒预警距离超过300千米,全空域搜索数据率在10至20秒。为满足舰载武器系统制导及火控的精度要求,雷达跟踪测量精度不能超过10分,而一般舰载警戒雷达的跟踪测量精度往往在几度以内。综合多方面性能上的考虑及目前的科技水平和经济性,舰载相控阵雷达雷达一般都以S频段作为工作频段。S频段与C频段和X频段相比较而言,波束宽,可用带宽窄,对海杂波的抑制能力不强。为了进行三坐标测量,该类型雷达都采用针状波束,为了提高可靠性,一般都采用工作在饱和放大模式的固态发射机。由于发射机输出功率不可调,故不能象普通对海雷达那样对发射波束进行赋形,导致在低空或掠海工作模式时海杂波更加强烈。在近岸工作时,如果蒸发波导等异常传播效应明显,会有大量远距陆地、岛屿等杂波出现,距离上的多重折叠会进一步增加杂波抑制的难度。而为了保证多任务和多目标能力,此时一般不采用MTD或
2010项目练习 设 计 作 品 作品名称:点光源跟综系统 设计组员:王国凯徐文超蔡露王奇志专业:应用电子技术 指导老师:唐炎明
摘要:本文设计的是一个点光源追踪系统,主要由光照传感器的照度检测与处理,控制器分析与处理,执行机构运行这几个部分构成。整个系统是以A T89S52为控制核心,通过四个光照传感器来检测光照,依据光照度的变化、大小来判断出点光源的位置与运动趋势,并将点光源运动分解为水平和竖直方向的二维运动,借以来控制水平电机与竖直电机的旋转角度。当水平方向上的两传感器的测量数值相对接近,同时竖直方向上的两传感器的测量数值也相对接近时,位于竖直传感器中间的激光笔将精确的指向点光源。除基本要求满足外,本系统设计了一些拓展环节:在点光源正对及电机运动幅度允许的条件下,激光笔可追踪任意方向移动的点光源,也可换速度档,达到迅速调节的目的。 关键字:点光源定位寻迹二维运动分析步进电机控制A T89S52
一.系统方案设计 1.主控芯片 根据本题的要求,整个系统中必须要有一个主控芯片来处理数据和控制操作,主要考虑以下两种方案: 方案一:AT89C51系列单片机。8位低功耗单片机,性能良好。 方案二:AT89S52系列。8位处理器内核高性能处理器,具有强大的控制、处理能力,稳定的系统,提供方便高效的开发环境。 本系统选取AT89S52单片机作为控制器,AT89S52支持低功耗模式,性能稳定,在控制、处理数据速度上有优势,,所以选择方案二。 2.传感器的选择 本系统的传感器主要是检测光照度,可考虑的传感器如下列方案: 方案一:光敏电阻。从光照特性来看,随着光照强度的增加,光敏电阻的阻值开始迅速下降,可以反映光照的变化,但该特性大多数情况为非线性,部分光照区间内,特性变化不灵敏。 方案二:光敏三极管。光敏三极管具有单向导电性,无光照时,有很小的暗电流,当受到光照时,光电流随射光强度的变化而变化。 在测试光敏电阻,发现光源的距离限制了两者的应用范围。当距离比较大时,两者的灵敏度大大降低。经实践测定,光敏三级管传感器满足要求,因此传感器选择方案二。 3.电机的选择 电机的主要作用是调整激光笔的位置,指向点光源,可选取的类型如下方案:方案一:步进电机。在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。每给一次脉冲信号,电机能够转过一个步距角。 方案二:直流电机。电机的转速受负载影响,惯性大。 根据设计的要求,步进电机转速平稳,容易控制,因而选用第一种方案。 4.点电源的供电方案 根据题目要求:为产生150mA~350mA的LED驱动电流,采用比例电流源。经测试可行。 5.总方案的确定 综上,本系统最终以A T89S52作为控制器,用光敏三极管做检测元件,通过控制步进电动机来使激光笔指向点光源。
第31卷 第4期 2008年8月 电子器件 Chinese J ournal Of Elect ron Devices Vol.31 No.4Aug.2008 Study T echnology of Maximum Pow er Point T racker on the Solar Cell 3 YA N G Fan 3 ,P EN G Hong 2w ei ,H U W ei 2bi n g ,L I Guo 2pi ng ,J I A N G Yan (College of Elect ronic and I nf ormation Engineering ,W uhan I nstit ute of Technology ,W uhan 430073,Chi na ) Abstract :Outp ut characteristic of t he solar battery in p hotovoltaic power 2generation system and t he princi 2ple of Maximum Power Point Tracker are int roduced.Bot h t he merit s and flaws of several t racing met hods in common usage are analysed.The emp hasis of t he st udy is Maximum Power Point Tracker based on quadratic interpolation.A system is designed to ascertain t he maximum power outp ut (M PO ),which is based on regular empirical approach and t he quadratic interpolation.The result of t he test indicates t hat t he M PO of solar battery can be ascertained very soon in t he quadratic interpolation.K ey w ords :solar cell ;quadratic interpolation ;Maximum Power Point Tracker EEACC :8250 太阳能电池最大功率点跟踪技术探讨 3 杨 帆3,彭宏伟,胡为兵,李国平,姜 燕 (武汉工程大学电气信息学院,武汉430074) 收稿日期:2007208220 基金项目:湖北省教育厅基金资助(20060271)作者简介:杨 帆(19662),女,硕士,硕士生导师,教授,主要研究方向为智能仪器与测控技术,yangfan188@https://www.doczj.com/doc/632900641.html,. 摘 要:介绍了光伏发电系统太阳能电池的输出特性及最大功率点跟踪技术的基本原理。分析了多种常用的跟踪方法的优 缺点。重点研究了二次插值法的最大功率点跟踪技术。并设计了一个系统,应用常规实验方法及二次插值法寻找太阳能电池的最大输出功率,试验结果表明二次插值法能快速寻找太阳能电池的最大输出功率。 关键词:太阳能电池;二次插值;最大功率点跟踪 中图分类号:TP331 文献标识码:A 文章编号:100529490(2008)0421081204 太阳能作为绿色能源,具有无污染,无噪音,取之不尽,用之不竭等优点,越来越受到人们的关注。由于光伏系统目前的主要问题是电池的转换效率低且价格昂贵,因此,如何进一步提高太阳能电池的转换效率,如何充分利用光伏阵列转换的能量,一直是光伏发电系统研究的重要方向。太阳能光伏发电系统的最大功率点跟踪控制M PP T (Maximum Power Point Tracker )就是其中一个重要的研究课题。 最大功率点跟踪是太阳能并网发电中的一项重要的关键技术,它是指,为充分利用太阳能,控制改变太阳能电池阵列的输出电压或电流的方法,使阵列始终工作在最大功率点上,根据太阳能电池的特性,目前实现的跟踪方法主要有以下三种:太阳追踪、最大功率点跟踪或两种方法综合使用。出于经 济方面的考虑,在小规模的系统中经常使用最大功率点跟踪的方法[1]。M PP T 能使太阳能电池阵列的输出功率增加约15%~36%。 1 太阳能电池的伏安特性分析 太阳能电池的伏安(p 2u )特性如图1所示,图1(a )为温度变化时的p 2u 特性曲线,图1(b )是日照强度变化时的p 2u 特性曲线。从图可以看出太阳能电池具有明显的非线性。太阳能电池的输出受日照强度、电池结温等因素的影响。当结温增加时,太阳能电池的开路电压下降,短路电流稍有增加,最大输出功率减小;当日照强度增加时,太阳能电池的开路电压变化不大,短路电流增加,最大输出功率增加。在一定的温度和日照强度下,太阳能电池具有唯一
最大功率跟踪控制在光伏系统中的应用3X 赵庚申33,王庆章 (南开大学光电所,天津300071) 摘要:对最大功率跟踪控制中DC2DC变换器的原理和控制方法进行了实验研究,利用DC2DC转换电路和单片机控制系统实现最大功率点跟踪,使太阳电池始终保持最大功率输出;和普通的控制器相比增加输出功率5%~15%。 关键词:光伏(PV);最大功率点跟踪(MPPT);DC2DC变换器 中图分类号:TP206 文献标识码:A 文章编号:100520086(2003)0820813204 T racing and Control of Maximum Pow er Point in a PV System ZHAO G eng2shen33,WAN G Qing2zhang (Institute of Photoelectronics,Nankai University,Tianjin300071,China) Abstract:Principle and control method of DC2DC conversion for MPPT in a solar cell system experi2 mentally discussed.MPPT was implemented with a DC2DC conversion circuit and a MCU control system,and more output power of5to15percent than common control mathod was achieved. K ey w ords:photovoltaics system(PV);maximum power point tracking(MPPT);DC2DC conversion 1 引 言 独立光伏系统一般是由储能蓄电池电压来选择太阳电池输出电压,而对蓄电池的充放电控制则是通过监控蓄电池的电压实现,控制工作电压在一定程度上可以调节太阳电池的输出。但太阳电池的最大功率点是变化的。当太阳电池的最大功率点超出所控制的范围时,就会浪费一部分能源。因此,为了有效利用太阳能,就必须跟踪控制太阳电池的最大功率点来调节太阳电池的输出;同时将蓄电充电电压限制在一定的范围,以保证蓄电池有稳定的电压。在并网发电光伏系统中,通过跟踪控制太阳电池的最大功率点来调节太阳电池的输出,可以随时将系统富裕的电能馈送到常规电网,最大限度地利用太阳能。 DC2DC变换器是通过控制电压的方法将不控的直流输入变为可控的直流输出的一种变换电路,被广泛应用于开关电源、逆变系统和用直流电动机驱动的设备中[1]。用DC2DC变换器可以实现最大功率点的跟踪(MPPT)。实际使用中用DC2DC变换器实现MPPT有不同的方法,其中谐振法是利用开关型电压逆变器的输出电压,通过电感、电容产生谐振,电感上的电压通过变压器和桥式整流向蓄电池充电。该方法可以通过改变工作频率来调节输出电压和电流,实现MPPT,但线路较复杂,需用中间变压器,本文将DC2DC变换器接入太阳电池的输入回路,并将对DC2DC变换器的输入、输出电压和电流测量结果通过单片机的分析运算,由单片机输出PWM脉冲调节DC2DC转换器内部开关管的占空比来控制太阳电池的输出电流,从而使蓄电池电压保持恒定。同时通过控制开关管的占空比也可调节太阳电池输出。由于采用了升降压式(buck2boost)DC2DC转换电路[2]来实现MPPT,所以该方法电路简单、软硬件结合、控制方法灵活。 2 MPPT原理和控制方法[3] 2.1 升降压式DC2DC变换电路 升降压式DC2DC转换电路原理如图1。在开关管Q1处于导通状态时,电源给电感L充电,L上的 光电子?激光 第14卷第8期 2003年8月 J ournal of Optoelectronics?L aser Vol.14No.8 Aug.2003 X收稿日期:2003203212 3 基金项目:“十五”国家重大科技攻关资助项目(2002BA901A44) 33E2m ail:zhaogs@https://www.doczj.com/doc/632900641.html,
雷达发展史 雷达的基本概念形成于20世纪初。但是直到第二次世界大战前后,雷达才得到迅速发展。早在20世纪初,欧洲和美国的一些科学家已知道电磁波被物体反射的现象。 1922年,意大利G.马可尼发表了无线电波可能检测物体的论文。美国海军实验室发现用双基地连续波雷达能发觉在其间通过的船只。1925年,美国开始研制能测距的脉冲调制雷达,并首先用它来测量电离层的高度。30年代初,欧美一些国家开始研制探测飞机的脉冲调制雷达。1936年,美国研制出作用距离达40公里、分辨力为457米的探测飞机的脉冲雷达。1938年,英国已在邻近法国的本土海岸线上布设了一条观测敌方飞机的早期报警雷达链。 第二次世界大战期间,由于作战需要,雷达技术发展极为迅速。就使用的频段而言,战前的器件和技术只能达到几十兆赫。大战初期,德国首先研制成大功率三、四极电子管,把频率提高到500兆赫以上。这不仅提高了雷达搜索和引导飞机的精度,而且也提高了高射炮控制雷达的性能,使高炮有更高的命中率。1939年,英国发明工作在3000兆赫的功率,地面和飞机上装备了采用这种磁控管的微波雷达,使盟军在空中作战和空-海作战方面获得 优势。大战后期,美国进一步把磁控管的频率提高到10吉赫,实现了机载雷达小型化并提高了测量精度。在高炮火控方面,美国研制的精密自动跟踪雷达SCR-584,使高炮命中率从战争初期的数千发炮弹击落一架飞机,提高到数十发击中一架飞机。 40年代后期出现了动目标显示技术,这有利于在地杂波和云雨等杂波背景中发现目标。高性能的动目标显示雷达必须发射相干信号,于是研制了功率、、前向波管等器件。50年代出现了高速喷气式飞机,60年代又出现了低空突防飞机和中、远程导弹以及军用卫星,促进了雷达性能的迅速提高。60~70年代,电子计算机、、和大规模数字集成电路等应用到雷达上,使雷达性能大大提高,同时减小了体积和重量,提高了可靠性。 在雷达新体制、新技术方面,50年代已较广泛地采用了动目标显示、单脉冲测角和跟踪以及脉冲压缩技术等;60年代出现了;70年代固态相控阵雷达和脉冲多普勒雷达问世。 在中国,雷达技术从50年代初才开始发展起来。中国研制的雷达已装备军队。中国已经研制成防空用的二坐标和三坐标警戒引导雷达、地-空导弹制导雷达、远程导弹初始段靶场测量雷达和再入段靶场测量与回收雷达。中国研制的大型雷达还用于观测中国和其他国家发射的人造卫星。 在民用方面,远洋轮船的导航和防撞雷达、飞机场的航行管制雷达以及气象雷达等均已生产和应用。中国研制成的机载合成孔径雷达已能获得大面积清晰的测绘地图。中国研制的新一代雷达均已采用计算机或微处理器,并应用了中、大规模集成电路的数字式信息处理技术,频率已扩展至毫米波段。① 尽管雷达在二战时发展迅速,但追根溯源,此前的科学家运用他们的智慧为此创造了必要的条件。让我们来看下面的简史: 1842年多普勒(Christian Andreas Doppler)率先提出利用多普勒效应的多普勒式雷达。 1864年马克斯威尔(James Clerk Maxwell)推导出可计算电磁波特性的公式。 1886年赫兹(Heinerich Hertz)展开研究无线电波的一系列实验。1888年赫兹成功利用仪器产生无线电波。
2010第二届“TI杯”陕西省大学生电子设计竞赛 题目B: 《点光源跟踪系统》 参赛学生:李伟龙、梁谋、张凯 指导教师:张倩 学校:西安交通大学城市学院 院系:电信系
摘要 本系统以TI公司的超低功耗 MSP430 处理器为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统.该系统能准确跟踪点光源的位置并用激光笔指示其位置。以考核系统跟踪轨迹的准确性,轨迹的跟踪以完成任务的准确度来评判设计完成指标。 硬件系统以MSP430F5438为核心,根据光敏二极管的光电特性检测光源位置,采用步进电机来完成跟踪指示的功能。软件部分采用基准光照比对的思想编写出源代码来锁定光源位置,实现光源的检测与准确定位。经过多次测量验证,结果表明所设计的点光源跟踪系统能够自动检测点光源位置并指示。 关键词:光源跟踪定位,光敏二极管, MSP430,步进电机控制
目录 摘要 (1) 1 系统方案选择与论证 (4) 1.1光源采集方案 (4) 1.2光源检测与处理方案 (4) 1. 3 方案选择 (3) 2 系统的工作原理 (5) 3 硬件系统设计 (5) 3.1 光源检测部分 (4) 3.2信号处理部分 (5) 3.3电机驱动控制部分 (5) 4 软件系统设计 (6) 5点光源的设计、电流的测量及显示部分 (7) 6 测试结果及误差分析 (8)
1 系统方案选择与论证 根据题目的基本要求,本系统主要完成对光源的跟踪与指示,通过采集并处理不同位置光照强弱的有关数据,进而控制电机转向,以实现对光源的跟踪,下面论证系统实现方案。 1.1光源采集方案 光源采集可以采用光敏电阻,光敏二极管,或者红外接收管,由于光敏电阻受检测距离和光照强度特别是普通白光的的影响较强烈,当光源距离大于三米时感应电压信号很弱,红外接收管只受红外光控制.光敏二极管检测距离较远,有二极管特性,其导通条件还和外界光线有关,在室内环境下,外界光线克服了其导通压降,提高了检测的精确度,本系统只对LED光源进行检测与跟踪。 基于上述分析,拟采用光敏二极管实现光源的采集与跟踪 1.2光源检测与处理方案 光敏二极管采集到的信号电压通过MSP430单片机的A/D模块,实现对信号的处理.通过继电器对电机进行控制。 1.3方案选择 基于以上方案的优缺点比较,本设计采用光敏二极管采集光源,通过电压跟随,将信号电压送入MSP430 对步进电机进行控制方案,实行光源的精确定位,系统电气原理图如下图1.3-1所示
光伏电池及其最大功率点跟踪 1光伏电池 1.1 光伏电池简介 太阳能电池是一种由于光生伏特效应而将太阳光能即时转化为电能的器件。当太阳光照在半导体p-n结上,由于吸收了光子的能量,会形成电子--空穴对,在p-n结电场的作用下,空穴由n区流向p区,电子由p区流向n区,这使得相应区域的主载流子的浓度在靠近p-n结部分增加,而这种局部浓度的增加必然使得主载流子朝着外部接触面的方向扩散,导致外部端子上产生电压,接通电路后就形成电流。单体的单晶硅光伏电池的输出电压在标准照度下只有0.5V左右,常见的单体电池输出功率一般在1W左右,一般不能直接作为电源使用。单体电池除了容量小以外,其机械强度也较差。因此在实际应用中,将若干光伏电池单体串并联并封装起来成为有比较大的输出功率(几瓦到几百瓦不等)的太阳能电池组件。光伏电池组件再经过串并联就形成了光伏电池阵列,可以作为大型光伏并网逆变器的功率输入。
图2.1 太阳能电池单体、组件、方阵示意图 1.2 光伏电池数学模型 光伏电池的数学模型[12]可以由图2.2所示的单二极管等效电路[13]来描述。 图中L R 为光伏电池的外接负载,负载电压为L U ,负载电流为L I 。s R 和sh R 为光伏电池内阻。s R 为串联电阻,通常阻值较小,取决于体电阻、接触电阻、扩散电阻以及电极电阻等;sh R 为旁路电阻,一般阻值较大,取决于电池表面污染和半导体晶体缺陷引起的边缘漏电以及耗尽层内的复合电流等。VD I 为通过p-n 结的总扩散电流。sc I 代表光子在光伏电池中激发的电流,取决于辐照度、电池面积和本体温度T 。
L I L 图2.2 光伏电池的单二极管等效电路 )1(0-=AKT qE D VD e I I (2.1) 式中0D I 为光伏电池在无光照时的饱和电流。 旁路电阻两端电压s L L sh R I U U +=,流过旁路电阻的电流为 ()sh s L L sh R R I U I /+=。 由以上各式可得负载电流为: sh s L L AKT R I U q D sc L R R I U e I I I s L L +-???? ??--=+1) (0 (2.2) 一般s R 很小,sh R 很大,可以忽略不计。可得理想光伏电池特性: )1(0--=AKT qU D sc L L e I I I (2.3) 由式2.3可得 ??? ? ??+-=1ln 0D L sc L I I I q AKT U (2.4)
综合设计报告 设计题目:基于单片机的光源自适应控制系统设计
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日导师签名:日期:年月日
如何利用分布式最大功率点跟踪系统提高光伏系统效率 太阳能是市场上最有前景的可再生能源之一。由于政府推出激励政策和传统电力成本不断攀升的影响,越来越多的家庭开始转向太阳能,并在屋顶安装光伏(PV)系统。按照目前的光伏系统价格计算,用户通常在 7-8 年后才能获得投资回报。政府激励政策和光伏系统的使用寿命必须能持续 20 年或更久。太阳能光伏系统的投资回报取决于该系统每年的发电量,因此用户需要的光伏系统必须具备高效、可靠和易于维护等特性,从而可以获得最大限度的发电量。 如今,很多安装太阳能光伏系统的用户已经意识到部分或间歇性的遮蔽会影响到系统的发电量。 部分阴影遮蔽对太阳能光伏系统的影响: 当树木、烟囱或其他物体投射的阴影遮挡住光伏系统时,就会导致系统造成“失配”问题。即使光伏系统只受到一点点阴影的遮挡都会导致发电量的大幅下跌。部分遮蔽导致的系统失配对发电量的实际影响很难通过简单的计算公式获得。因为影响系统发电量的因素很多,包括内部电池模块间互连、模块定向、光伏电池组间的串并联问题以及逆变器的配置等。光伏模块通过多个电池串相互连接而成,每个电池串被称为一个“组列”。每个组列由一个旁路二极管来保护,以免一个或多个电池被遮蔽或损坏时导致整个电池串因为过热而受到损坏。这些串联或并联的电池组列能够使电池板产生相对较高的电压或电流。本文来自环球光伏网 光伏阵列由串联在一起的光伏模块通过并联构成。每串光伏模块的的最大电压必须低于逆变器的最大输入电压额定值。 当光伏系统部分被遮蔽时,未被遮蔽的电池中的电流流经被遮蔽部分的旁路二极管。 当光伏阵列受到遮蔽而出现上述情况时,会产生一条具有多个峰值的 V-P 电气曲线。图 1 显示了具有集中式最大功率点跟踪系统( MPPT) 功能的标准并网配置,其中一个组列的两个电池板被遮蔽。集中式 MPPT无法设置直流电压,因此无法令两个组列的输出功率都达到最大。在高直流电压点 (M1),MPPT 使未遮蔽组列的输出功率达到最大。在低直流电压点 (M2),MPPT 将使遮蔽组列的输出功率达到最大:旁路二极管绕过遮蔽电池板,此组列的未遮蔽电池板将提供全量电流。阵列的多个 MPP 可能导致集中最大功率点跟踪(MPPT)配