史上最实用较深刻的峰值检测电路实例与分析
一、前言
峰值检测电路(PKD,Peak Detector)的作用是对输入信号的峰值进行提取,产生输出V o = Vpeak,为了实现这样的目标,电路输出值会一直保持,直到一个新的更大的峰值出现或电路复位。
峰值检测电路在AGC(自动增益控制)电路和传感器最值求取电路中广泛应用,自己平时一般作为程控增益放大器倍数选择的判断依据。有的同学喜欢用AD637等有效值芯片作为程控增益放大器的判据,主要是因为集成的方便,但个人认为是不合理的,因为有效值和信号的正负峰值并没有必然联系;其次,实际应用中这类芯片太贵了。当然,像电子设计竞赛是可以的,因为测试信号总是正弦波,方波等。(本文参加了TI公司的博文比赛,觉得还行的话,希望大家帮顶一下、回复一个,谢谢大家,我会更努力的:-)
二、峰值检测电路原理
顾名思义,峰值检测器(PKD,Peak Detector)(本文默认以正峰值检测为例)就是要对信号的峰值进行采集并保持。其效果如下如(MS画图工具绘制):
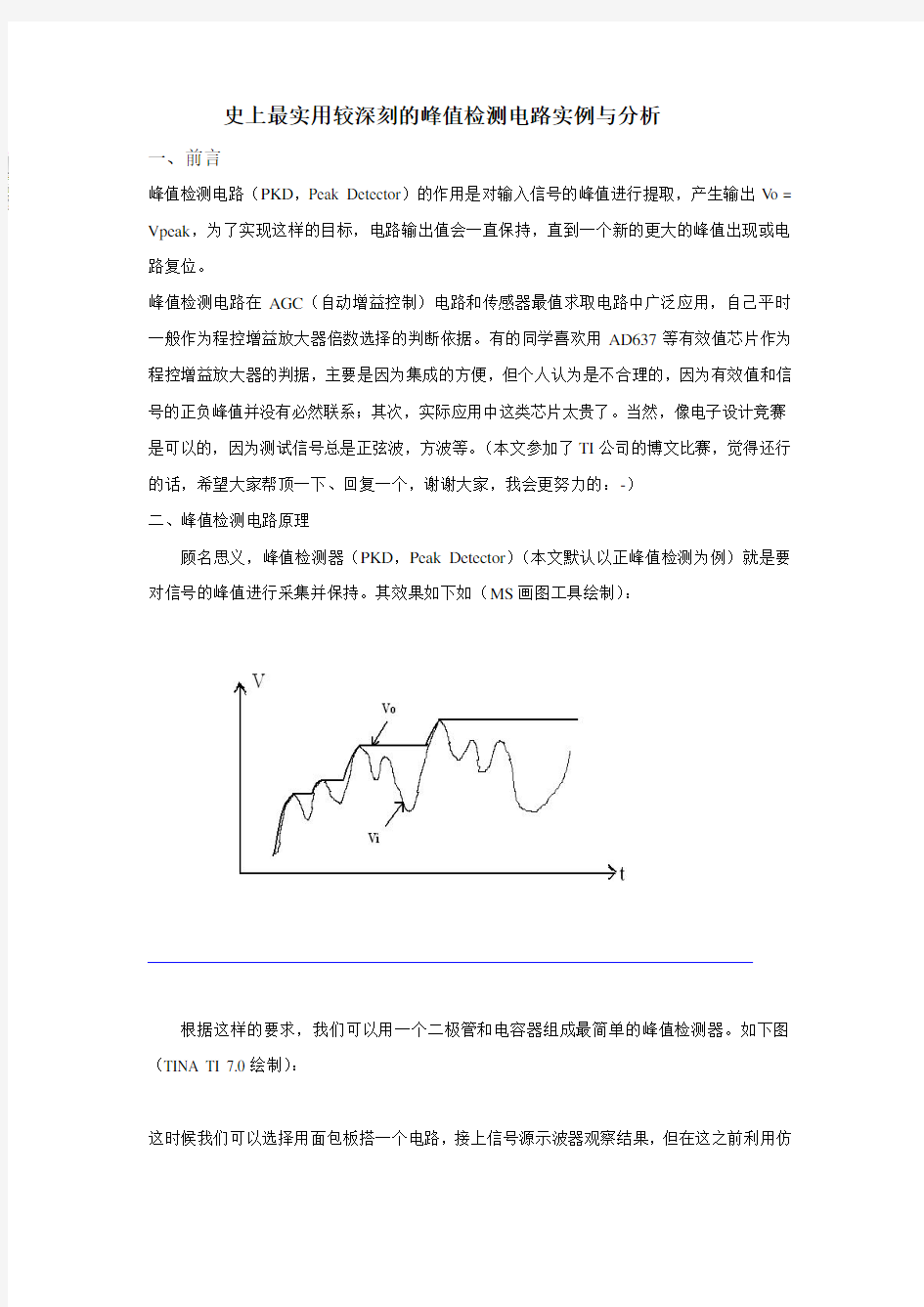
根据这样的要求,我们可以用一个二极管和电容器组成最简单的峰值检测器。如下图(TINA TI 7.0绘制):
这时候我们可以选择用面包板搭一个电路,接上信号源示波器观察结果,但在这之前利用仿
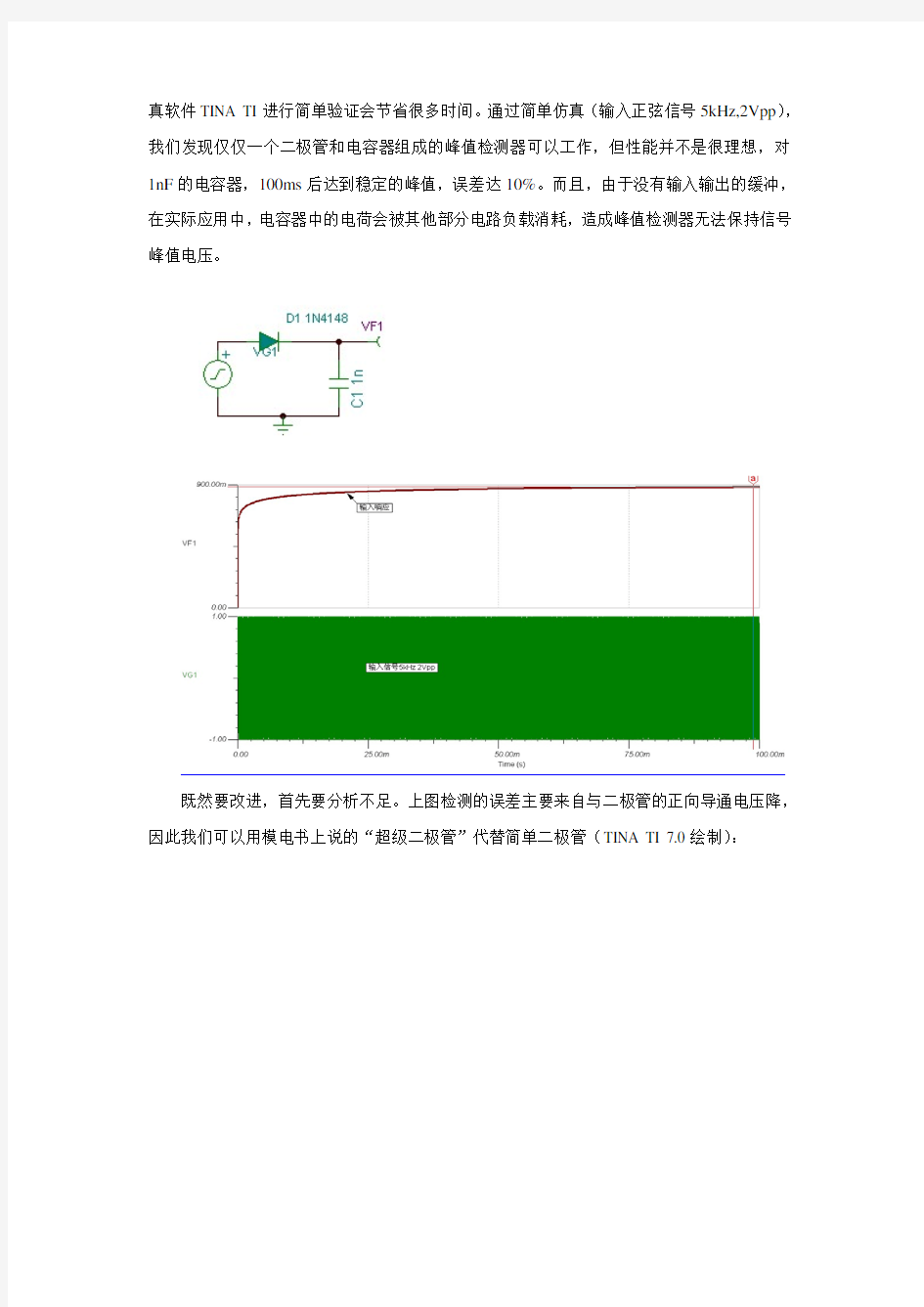
真软件TINA TI进行简单验证会节省很多时间。通过简单仿真(输入正弦信号5kHz,2Vpp),我们发现仅仅一个二极管和电容器组成的峰值检测器可以工作,但性能并不是很理想,对1nF的电容器,100ms后达到稳定的峰值,误差达10%。而且,由于没有输入输出的缓冲,在实际应用中,电容器中的电荷会被其他部分电路负载消耗,造成峰值检测器无法保持信号峰值电压。
既然要改进,首先要分析不足。上图检测的误差主要来自与二极管的正向导通电压降,因此我们可以用模电书上说的“超级二极管”代替简单二极管(TINA TI 7.0绘制):
从仿真结果来看,同等测试条件下,检测误差大大减小。但我们知道,超级二极管有一个缺点,就是Vi从负电压变成正电压的过程中,为了闭合有二极管的负反馈回路,运放要结束负饱和状态,输出电压要从负饱和电压值一直到(Vi+V二极管)。这个过程需要花费时间,如果在这个过程,输入发生变化,输出就会出现失真。
因此,我们需要在电路中加入防止负饱和的措施,也就是说,我们输入部分的处理环节要能够尽量跟随输入信号的电压,并提供一个尽可能理想的二极管,同时能够提供有效的输入缓冲。一个经典的电路是通过在输入和输出间增加一个二极管,这有点类似于电压钳位(TINA TI 7.0绘制):
经过以上的简单描述,其实我们已经可以将峰值检测器分成几个模块:(1)模拟峰值存储器,即电容器;(2)单向电流开关,即二极管;(3)输入输出缓冲隔离,即运算放大器;(4)电容放电复位开关(这部分非必须,如:如果电容值选取合适,两次采样时间间隔较
大)。
三、几种峰值检测电路
采用二极管和电容器组成的峰值检测电路有多种实现方式和电路形式,在TI等公司的一下文献中,我们可以查到不少。就自己个人实验的结果而言,二极管、电容、放大器组成的峰值检测器有效工作频率范围在500kHz一下,对100m
Vpp以上的输入信号检测误差可达到3%以内,后文中3.2的曲线图能较有代表性地反映这类峰值检测器的性能。
3.1 分立二极管电容型
TI公司的Difet 静电计级运算放大器OPA128的DATASHEET里提供了一个很好用的峰值检测器:
TI的仿真结果如下:
TINA
值得一提的是,该图有几个用心之处:(1)采用FET运放提高直流特性,减小偏置电流OPA128的偏置电流低至75fA!;(2)将场效应管当二极管用,可以有效减小反向电流同时增加第一个运放的输出驱动力;(3)小电容应该是防止自激的。实际应用中可以用TL082
双运放和1N4148来代替场效应管,性能价格比较高,详见https://www.doczj.com/doc/6316864532.html,/billyevans/193257/message.aspx。
3.2无二极管型
无二极管型是利用比较器输出的开集BJT或者开漏MOSFET代替二极管,进一步提高性价比,TI公司的LM311的DATASHEET提供了一个非常简单的峰值检测器电路:
该图作者使用TINA TI 7.0和Multisim10.1均未仿真成功,但电路应该是没有问题的,只是性能得看实验。
重点一提的是EDN英文版上有篇文章(见参考文献)提供了一种非常棒的PKD:
性能如下:
该图作者用TINA未能仿真成功,Mutisim10.1仿真成功:
性能如下:
3.3集成峰值检测电路
ADI公司有一款集成的PKD——PKD01,本质也是二极管加电容的结构,性能不详。
四、其他结构峰值检测电路
在高速的环境下,二极管和电容结构的电路就无法适应了,作者见过FPGA+DAC+高速比较器组成的峰值检测器,原理很简单,就是将DAC输出和输入信号作比较,FPGA负责DAC电压输出控制和比较器输出检测。
五、参考文献
[1] 瞿安连.应用电子技术.科学技术出版社,2006
[2] 华成英,童诗白.模拟电子技术基础(第四版).北京:高等教育出版社,2006
[3] 德州仪器公司(中国)官方网站学习资源
[4] Inexpensive peak detector requires few components.Anthony H Smith
[5] Design with Operational Amplifiers and Analog Integrated Circuits.Franco, Sergio
讨论使用D触发器设计一个11001序列检测器,讨论序列可交迭(Overlap)检测和不可交迭检测在设计上的区别,讨论分别采用Mealy机设计和采用Moore机设计的区别,讨论未用状态的处理问题。 【要求】给出电路原理图或HDL代码,要求进行仿真,并给出仿真结果。 1.原件介绍 D触发器(74LS74)、“与”门(74LS08)、“或”门(74LS32)、“非”门(74LS04),集成电路引脚
2.设计思路 根据要求,设计的序列检测器有一个外部输入x和一个外部输出Z。输入和输出的逻辑关系为:当外部输入x第一个为"1",外部输出Z为"0";当外部输入x 第二个为"1",外部输出Z为"0";当外部输入第三个x为"0",外部输出Z为"0",当外部输入第四个x为“0”,外部输出Z为0,当外部输入第五个x为“1”,外部输出Z为“1”。假定有一个外部输入x序列以及外部输出Z为: 输入X 0 1 1 1 0 0 1 0 1 输出Y 0 0 0 0 0 0 1 0 0 要判别序列检测器是否连续接收了"11001",电路必须用不同的状态记载外部输入x的值。假设电路的初始状态为A,x 输入第一个"1",检测器状态由A装换到B,用状态B记载检测器接受了"11001"序列的第一个"1",这时外部输出Z=0;x输入第二个"1",检测器状态由B装换到C,用状态C 记载检测器接了“11001”序列的第二个"1",外部输出Z=0;x输入第三个"0",检测器状态由C装换到D,外部输出Z=0;x输入第四个为“0”,检测器状态由D装换到E,外部输出Z=0;x输入第五个为“1”,检测器状态由E装换到F,外部输出Z=1。然后再根据外部输入及其他情况时的状态转移,写出相应的输出。以上分析了序列检测器工作,由此可画出原始状态图。根据原始状态图可列出原始状态表。 状态转换表 A B D C E F 1\0 1\0 0\0 0\0 1\1 0\0 0\0 1\0 1\0 0\0 0\0
信号隔离安全栅与信号隔离器的区别 一、定义 1、信号隔离器(isolator ):一般指弱电系统中的信号隔离器,既保护下级信号系统不受上级系统影响和干扰。 2、信号隔离安全栅(safety barrier):接在本质安全电路和非本质安全电路之 间。将供给本质安全电路的电压或电流限制在一定安全范围内的装置。安全栅是一种统称,分为齐纳式安全栅和隔离式安全栅,隔离式安全栅简称隔离栅。 金湖英普瑞电子设备有限公司主营产品有:隔离安全栅,信号隔离器,信号隔离配电器,直流信号隔离器,开关量信号安全栅,电流变送器。同时代理日本横河EJA变送器,横河AXF 电磁流量计,横河DY涡街流量计,罗斯蒙特3051系列变送器,罗斯蒙特248系列温度变送器,罗斯蒙特475手操器。 二、工作原理 1、信号隔离器工作原理:首先将变送器或仪表的信号,通过半导体器件调制变换,然后通过光感或磁感器件进行隔离转换,然后再进行解调变换回隔离前原信号,同时对隔离后信号的供电电源进行隔离处理。保证变换后的信号、电源、地之间绝对独立。 2、齐纳式安全栅的工作原理 安全栅的主要功能就是限制安全场所的危险能量进入危险场所,及限制送往危险场所的电压和电流。 齐纳管Z用于限制电压。当回路电压接近安全限压值时,齐纳管导通,使齐纳管两端的电压始终保持在安全限压值以下。 电阻R用于限制电流。当电压被限制后,适当选择电阻值,可将回路电流限制在安全限流值以下。 保险丝F的作用是防止因齐纳管被长时间流过的大电流烧断而导致回路限压失效。当超过安全限压值的电压加在回路上时,齐纳管导通,如果没有保险丝,流经齐纳管的电流将无限上升,最终烧断齐纳管,使回路失去限压。 为确保回路限压安全,保险丝的熔断速度要比齐纳管可能被烧断的速度快十倍。 采用图一所示的三冗余齐纳管的安全栅基本限能电路结构,能够确保安全栅在正常工作、一个故障点和两个故障点时均能将安全栅的输出能量限制在安全参数规定的范围之内,从而满足ia级本质安全电路的要求。 3、隔离式信号隔离安全栅的工作原理 与齐纳安全栅相比,隔离式安全栅除具有限压与限流的作用之外,还带有电流隔离的功能。隔离栅通常由回路限能单元、电流隔离单元和信号处理单元三部分组成,基本功能电路如图二所示。回路限能单元为安全栅的核心
课程设计任务书 学生姓名:专业班级: 指导教师:工作单位: 题目:12 峰值检测电路 初始条件: 具备数字电子电路的理论知识;具备数字电路基本电路的设计能力;具备数字电路的基本调试手段;自选相关电子器件;可以使用实验室仪器调试。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) 1、4位LED显示; 2、设计峰值检测电路,模数转换,锁存电路; 3、清零设置功能;每次检测到的最大值被保存和显示; 4、安装调试并完成符合学校要求的设计说明书; 5、设计电源; 6、焊接:采用实验板完成,不得使用面包板。 时间安排: 第十九周一周,其中3天硬件设计,2天硬件调试 指导教师签名: 2012年 5 月 30日 系主任(或责任教师)签名:年月日
1 绪论 1.1软件介绍 Protues软件是英国Labcenter electronics公司出版的EDA工具软件。它不仅具有其它EDA工具软件的仿真功能,还能仿真单片机及外围器件。它是目前最好的仿真单片机及外围器件的工具。虽然目前国内推广刚起步,但已受到单片机爱好者、从事单片机教学的教师、致力于单片机开发应用的科技工作者的青睐。Proteus是世界上著名的EDA工具(仿真软件),从原理图布图、代码调试到单片机与外围电路协同仿真,一键切换到PCB设计,真正实现了从概念到产品的完整设计。是目前世界上唯一将电路仿真软件、PCB设计软件和虚拟模型仿真软件三合一的设计平台,其处理器模型支持8051、HC11、PIC10/12/16/18/24/30/DsPIC33、AVR、ARM、8086和MSP430等,2010年增加Cortex和DSP系列处理器,并持续增加其他系列处理器模型。在编译方面,它也支持IAR、Keil和MPLAB等多种编译,功能十分强大。 1.2 A/D转换芯片介绍 ICI-7135是421位双积分A/D转换芯片,可以转换输出±20000个数字量,有STB选通控制的BCD码输出,与微机接口十分方便。ICL7135具有精度高(相当于14位A/D转换),价格低的优点。其转换速度与时钟频率相关,每个转换周期均有:自校准(调零)、正向积分(被测模拟电压积分)、反向积分(基准电压积分)和过零检测四个阶段组成,其中自校准时间为10001个脉冲,正向积分时间为10000个脉冲,反向积分直至电压到零为止(最大不超过20001个脉冲)。故设计者可以采用从正向积分开始计数脉冲个数,到反向积分为零时停止计数。将计数的脉冲个数减10000,即得到对应的模拟量。图1给出了ICL7135时序,由图可见,当BUSY变高时开始正向积分,反向积分到零时BUSY变低,所以BUSY可以用于控制计数器的启动/停止。 ICL7135为DIP28封装,芯片引脚排列如图2所示,引脚的功能及含义如下: (1)与供电及电源相关的引脚(共7脚) .-V:ICL7135负电源引入端,典型值-5V,极限值-9V;
二、设计一个1010的序列检测器,检测到1010时输出为“1”否则为“0”,用D触发器实现。 第一步:根据要求进行逻辑抽象,得出电路的原始状态转换图和状态转换表。 取输入数据变量为X,检测的输出变量为Z, 该同步时序逻辑电路的功能是检测输入序列是否为1010,一旦输入序列出现一个1就记下来,因为这个1可能是1010序列的第一个1,;接着看输入是否为0,因为10是序列1010的前两位;其次再看输入是否为1,因为101是1010序列的前三位;最后再输入一个0,输出则为1,因为出现了一个1010序列,泽电路必须记住1,10,101,1010四种输入情况,每一种输入情况应与电路的一个状态相对应。 根据题意,设电路随机的输入和输出序列为: X:0 1 0 1 0 0 0 1 0 1 0 1 0…… Z: 0 0 0 0 1 0 0 0 0 0 1 0 0…… 该电路仅有一个输入端,每个现态有两个可能转移方向,设电路初态为S0,当X=0时,电路仍处在状态S0,当输入一个1以后的状态为S1,输入10以后的状态为S2,输入101以后的状态为S3,输入1010以后的状态为S4。以S n表示电路的现态,S n+1表示电路的次态。 由此得出原始状态转换图和原始状态转换表:
第二步:状态化简: 依据状态等效条件判断得出S0和S4在相同的输入条件下,它们转换到相同的次态去,且有相同的输出,故S0和S4等效,经分析比较,找出最大等效类:{S1},{S2},{S3},{S0,S4}。 由此得出化简的状态转换图和最简状态表: 第三步:状态编码: 最贱状态表共有四种状态,可用两位二进制代码来表示,设状态变量为Q1,Q2,依据状态编码原则,确定S0=00,S1=01,S2=11,S3=10四种状态,其编码后的状态转换图和状态转换表:
一、绪论 PID 参数的整定就是合理的选取PID 三个参数。从系统的稳定性、响应速度、超调量和稳态误差等方面考虑问题,三参数作用如下: 比例调节作用:成比例地反映系统的偏差信号,系统一旦出现了偏差,比例调节立即产生与其成比例的调节作用,以减小偏差。随着P K 增大,系统的响应速度加快,系统的稳态误差减小,调节应精度越高,但是系统容易产生超调,并且加大P K 只能减小稳态误差,却不能消除稳态误差。比例调节的显著特点是有差调节。 积分调节作用:消除系统的稳态误差,提高系统的误差度。积分作用的强弱取决于积分时间常数i T ,i T 越小,积分速度越快,积分作用就越强,系统震荡次数较多。当然i T 也不能过小。积分调节的特点是误差调节。 微分调节作用:微分作用参数d T 的作用是改善系统的动态性能,在d T 选择合适情况下,可以减小超调,减小调节时间,允许加大比例控制,使稳态误差减小,提高控制精度。因此,可以改善系统的动态性能,得到比较满意的过渡过程。微分作用特点是不能单独使用,通常与另外两种调节规律相结合组成PD 或PID 控制器。 二、设计内容 1. 设计P 控制器 控制器为P 控制器时,改变比例系数p K 大小。 P 控制器的传递函数为:()P P K s G =,改变比例系数p K 大小,得到系统的阶跃响应曲线
当 K=1时, P 当 K=10时, P K=50时,当 P
当P K =100时, p K 超调量σ% 峰值时间p T 上升时间r T 稳定时间s T 稳态误差ss e 1 49.8044 0.5582 0.2702 3.7870 0.9615 10 56.5638 0.5809 0.1229 3.6983 0.7143 50 66.4205 0.3317 0.1689 3.6652 0.3333 100 70.7148 0.2506 0.0744 3.6410 0.2002 仿真结果表明:随着P K 值的增大,系统响应超调量加大,动作灵敏,系统的响应速度加快。P K 偏大,则振荡次数加多,调节时间加长。随着P K 增大,系统的稳态误差减小,调节应精度越高,但是系统容易产生超调,并且加大P K 只能减小稳态误差,却不能消除稳态误差。 2. 设计PI 控制器 控制器为PI 控制器时,改变积分时间常数i T 大小(50=P K 为定值) PI 控制器的传递函数为: 11 ()PI P I G s K T s =+? ,改变积分时间常数i T 大小,得到系统的阶跃响应曲线
综合设计性实验报告 题目: 学生姓名: 学号: 班级: 指导教师: 学期:2010——2011第2学期
目录 一基本知识点 (1) 二实验器件 (1) 三设计思路 (1) 四设计过程 (2) (一)三位二进制减法计数器(无效状态000,001) (二)5 五引脚功能 (9) 六逻辑电路图: (11) 七实验结果波形图 (12) 八设计心得体会 (12)
一基本知识点 1、掌握时序电路的设计方法和步骤 2、掌握触发器的设计与应用 3、掌握移位寄存器的原理与应用 4 熟悉集成电路的引脚排列; 5 掌握芯片的逻辑功能及使用方法; 6 了解序列产生及检测器的组成及工作原理 7 会在EWB软件上进行仿真; 二实验器件 1、移位寄存器74LS194 1片 2、负边沿JK触发器74LS112 1片 3四输入与非门74LS20 1片 4、六输入非门74LS05 1片 5 电源一个 6 地线一个 7 与门,或门,非门若干个 8 时钟脉冲一个 三设计思路 1作原始状态表。根据给定的电路设计条件构成原始状态表和状
态转化图 2状态表的简化。原始状态表通常不是最小化状态表,它往往包括多余的状态,因此必须首先对它进行简化。 3状态分配。即对简化后的状态给以编码。这就要根据状态数确定触发器的数量并对每个状态指定一个二进制数构成的编码。 4根据给定的电路设计条件选择触发器根据 5 作激励函数和输出函数。根据选用的触发器激励表和电路的状态表,综合出电路中各触发器的激励函数和电路的输出函数。 ⑸6画逻辑图,并检查自启动功能 四设计过程 (一)101101001信号发生器的设计 设计一个信号序列发生器,在产生的信号序列中,含有“1011”信号码,要求用一片移位寄存器,生成信号序列“10110100”,其中含有1011码,其设计按以下步骤进行:、、 1本实验所用仪器为移位寄存器74LS194,确定移存器的位数n。因M=9,故n≥4,用74LS194 的四位。 2确定移存器的九个独立状态。将序列码101101001按照每四位一组,划分为九个状态,其迁移关系如下所示: 3作出状态转换表及状态转换图如下:
信号隔离器的工作原理及功能是什么? 1.工作原理: 首先将变送器或仪表的信号,通过半导体器件调制变换,然后通过光感或磁感器件进行隔离转换,然后再进行解调变换回隔离前原信号,同时对隔离后信号的供电电源进行隔离处理。保证变换后的信号、电源、地之间绝对独立。 2.功能: 一:保护下级的控制回路。 二:消弱环境噪声对测试电路的影响。 三:抑制公共接地、变频器、电磁阀及不明脉冲对设备的干扰;同时对下级设备具有限压、额流的功能是变送器、仪表、变频器、电磁阀PLC/DCS输入输出及通讯接口的忠实防护。 DIN系列导轨结构,易于安装,可有效的隔离:输入、输出和电源及大地之间的电位。能够克服变频器噪声及各种高低频脉动干扰。 信号隔离器的主要类型有哪些? 1.隔离器: 工业生产中为增加仪表负载能力并保证连接同一信号的仪表之间互不干扰,提高电气安全性能。需要将输入的电压、电流或频率、电阻等信号进行采集、放大、运算、和进行抗干扰处理后,再输出隔离的电流和电压信号,安全的送给二次仪表或plc\dcs使用。 2.配电器: 工业现场一般需要采用两线制传输方式,既要为变送器等一次仪表提供24V配电电源,同时又要对输入的电流信号进行采集、放大、运算、和进行抗干扰处理后,再输出隔离的电流和电压信号,供后面的二次仪表或其它仪表使用。 3.安全栅:
一些特殊的工业现场(如燃气公司和化工厂)不但需要两线制传输,既提供配电电源又有信号隔离功能,同时还需要具有安全火花防爆的性能,可靠地遏制电源功率、防止电源、信号及地之间的点火,限流、降压双重限制信号及电源回路,把进入危险场所的能量限制在安全定额范围内。 信号隔离器安装维护应注意哪些事项? 由于生产厂家不同,对隔离器的生产工艺、接线定义也不都相同,但使用场合基本相同,所以对产品的防护要求及维护基本相同。 1. 使用前应详细阅读说明书。 2. 作为信号隔离使用时,应将输入端串入环路电路中,输出端接取样回路。 3. 作为隔离配电使用时,应将输入端串入电源电路中,输出端接变送器。 4. 若不正常工作应先检查接线是否正确,注意电源有无及极性反正。 为什么有时PLC接收到的现场信号误差大且稳定性差? 造成这种现象的原因很多,不同仪表信号参考点之间的电位差是重要因素。由于这个“电位差”造成仪表信号之间产生干扰电流,致使PLC误差大且稳定性差。所以不同设备、仪表的信号有一个共同的参考点是最佳状况。隔离器使输入/输出电气上完全隔离,在PLC模拟接口板形成共同的参考点,达到理想状况问题就解决了。 设计隔离端子的原则是什么? 需要为每台隔离器都配电源吗?设计要遵循两个原则。第一:外部设备与中央处理系统(例如PLC、DCS)之间要进行电气隔离。第二:外部设备信号(无论是向中央处理系统发送信号的外部设备到还是接收信号的外部设备)之间要实现相互电气隔离。例如要把PLC输出的一路
第8卷第6期石家庄学院学报Vol.8,No.62006年11月JournalofShijiazhuangUniversityNov.2006序列检测器的一种简化实现算法 李俊红,解建军 (河北师范大学数学与信息科学学院,石家庄050016) 摘要:分析了序列检测器的内部原理,给出它的一种新硬件实现.利用它无需对状态图进行状态化简,极大地简化了时序线路的设计.最后结合具体实例说明了该设计思想的详细步骤和具体实现方法. 关键词:子串;主串;序列检测器 中图分类号:TP16文献标识码:A文章编号:1673-1972(2006)06-0063-03 1序列检测器原理 序列检测是指将一个指定的序列从数字流中识别出来,或在主串中查询相应子串,一般可以通过软件方法或时序电路即硬件方法实现.有关软件实现方法的研究可参见文献[1],本文主要针对时序电路进行讨论.用硬件方法实现序列检测器时,检测器中存储模式串,主串可以通过输入端流入检测器[2,3].在主串的输入过程中,检测器可以动态检测子串.检测器利用时序线路记忆已检测出的有效序列,并与自身所含的模式串进行比对,若检测成功,输出端自动输出成功标记[4].设计一个“11100”序列检测器,当识别到一组序列时,输入一个高电平.由于采用时序线路,主串的内容应每给一个上升沿或下降沿输入一位,具体应视所选触发器类型而定. 我们提出一种新硬件实现方法,在该方法中对每一个状态都根据实际意义给予特殊的含义,具体含义在后面的实例中再加以说明,由于不存在重复状态,故最终的状态图不用化简. 序列检测器的初态是指被检序列的第一位出现前的特定状态,此状态后如果输入的代码对检测有效(即被测序列的第一位),则相应次态为新的状态(第2个状态,它记住了被测序列的第一位),否则相应次态仍为初态.第2个状态是指被检序列的第一位出现后的特定状态,此状态后如果输入的代码对检测有效,(即被测序列的第2位)则相应次态为新的状态(第2个状态,它记住了被测序列的前2位),否则判断最近输入的代码是否是被检序列的第一位,是则相应次态仍为第2个状态,否则相应次态为初态.以次类推,第i个状态记住了被检序列的前i-1位,相应次态确定方法如下: 假设序列长度为n,当i<n时,如果第i个状态后输入的一位代码是被检序列的第i位,则次态为新的状态(记住了被检序列的前i位),否则次态按如下规则选择:从初态开始输入的i位代码中如果其中的后i-j位为被检序列的前i-j位,则次态为第i-j+1个状态(j=1,2,...,i-1,找到次态即停止),否则次态为初态.此时所有的外输出均为‘0’. 当i=n时,第n个状态已经记住了被检序列的前n-1位,此状态后输入的一位代码如果是被检序列的第n位,则外输出为‘1’,否则外输出为‘0’,其次态按如下规则选择:从初态开始输入的n位代码中如果其中的后n-j位为被检序列的前n-j位,则次态为第i-j+1个状态(j=1,2,...,n-1,找到次态即停止),当j=n时,次态为初态. 按上述方法构造的原始状态转移图中恰好含n个状态,且每个状态都有确定的含义,避免了其设计过程中,构造原始状态转移图繁杂,化简原始状态转移图麻烦的弊端,设计时既逻辑清晰,又不用化简,从而极大地简化了该类线路的设计. 收稿日期:2005-12-09 基金项目:河北省石家庄市科学研究与发展计划项目(05213570);河北师范大学青年基金资助(L2005Q02) 作者简介:李俊红(1971-),女,山西运城人,河北师范大学数学与信息科学学院讲师,硕士,研究方向:并行逻辑模拟,计算机系统结构.
沈阳航空航天大学北方科技学院 课程设计说明书 课设题目基于单片机的振动信号峰值参数检测器的设计 专业测控技术与仪器 班级 学号 学生姓名 指导教师 日期 2015年1月16日
沈阳航空航天大学北方科技学院 课程设计任务书 课程设计题目基于单片机的振动信号峰值参数检测器的设计 教研室工学一部专业测控技术与仪器 班级 课程设计时间: 2014 年12 月29 日至2015 年 1 月16 日 课程设计的内容及要求: 1. 内容 采用单片机系统设计振动传感器输出波动电压强度——峰值参数检测器,利用振动传感器、单片机设计一个能用LED实时显示振动信号峰值参数的测量系统。 2. 要求 (1)制定设计方案,并绘制出系统工作框图。 (2)绘制电路原理图,设计振动传感器输出信号模拟调理电路,实现交流信号的峰值检测,设计模数转换电路、LED显示电路及单片机系统电路。 (3)绘制软件流程图,软件编程实现单片机数据采集和北被测峰值的LED 显示。 (4)用单片机实验箱进行程序设计与调试。 (5)振幅显示为X.Xmm。 (6)撰写一篇6000字到8000字的课程设计报告。 指导教师刘利秋2014 年12 月28 日
目录 0 前言 (1) 1 总体方案设计 (1) 2 硬件电路设计. (2) 2.1振动传感器 (3) 2.2 控制信号放大电路 (3) 2.3 TLC549A/D转换 (4) 2.3.1 TLC549 引脚图及各引脚功能 (4) 2.3.2 TLC549 器件工作时 (4) 2.4 单片机系统 (5) 2.5 LED显示 (5) 3 软件设计 (6) 3.1显示程序设计 (8) 3.2峰值测量........................................... 错误!未定义书签。 4 调试分析 (9) 5 结论及进一步设想 (9) 参考文献 (9) 课设体会 (11) 附录1 电路原理图 (12) 附录2 程序清单 (13)
实验五 系统 PID 控制器设计及其参数整定 一、实验目的 (1) 掌握 PID 控制规律及控制器实现。 (2) 对给定系统合理地设计 PID 控制器。 (3) 掌握对给定控制系统进行 PID 控制器参数在线实验工程整定的方法。 二、实验原理 在串联校正中,比例控制可提高系统开环增益,减小系统稳态误差,提高系统的控制 精度,但会降低系统的相对稳定性,甚至可能造成系统闭环系统不稳定;积分控制可以提 高系统的型别(无差度),有利于提高系统稳态性能,但积分控制增加了一个位于原点的 开环极点。使信号产生 90°的相位滞后,于系统的稳定不利,故不宜采用单一的积分控制 器;微分控制规律能反映输入信号的变化趋势,产生有效的早期修正信号,以增加系统的 阻尼程度,从而改善系统的稳定性,但微分控制增加了一个-1/τ 的开环零点,使系统的相 角裕度提高,因此有助于系统稳态性能的改善。 在串联校正中,PI 控制器增加了一个位于原点的开环极点,同时也增加了一个位于 s 左半平面的开环零点。位于原点的开环极点可以提高系统的型别(无差度),减小稳态误 差,有利于提高系统稳态性能;负的开环零点可以减小系统的阻尼,缓和 PI 极点对系统产 生的不利影响。只要积分时间常数 T i 足够大,PI 控制器对系统的不利影响可大为减小。PI 控制器主要用来改善控制系统的稳态性能。 在串联校正中,PID 控制器增加了一个位于原点的开环极点,和两个位于 s 左半平面 的开环零点。除了具有 PI 控制器的优点外,还多了一个负实零点,动态性能比 PI 更具有 优越性。通常应使积分发生在低频段,以提高系统的稳态性能,而使微分发生在中频段, 以改善系统的动态性能。 PID 控制器传递函数为 G e (s )=K p (1+1/T i s +T d s ),注意工程 PID 控制器仪表中比 例参数整定常用比例度 δ%,δ% =1/K p *100%. 三、实验内容 (1)Ziegler-Nichols ——反应曲线法 反应曲线法适用于对象传递函数可以近似为 e -Ls 的场合。先测出系统处于开环状态 下 的对象动态特性(即先输入阶跃信号,测得控制对象输出的阶跃响应曲线),如图 6-25 所 示,然后根据动态特性估算出对象特性参数,控制对象的增益 K 、等效滞后时间 L 和等效 时间常数 T ,然后根据表 5-4 中的经验值选取控制器参数。 图 5-1 控制对象开环动态特性 表 5-1反应曲线法 PID 控制器参数整定 控制器类型 比例度 δ% 比例系数 K p 积分时间 T i 微分时间 T d P KL/T T/KL ∞ 0 PI 1.1KL/T 0.9T/KL L/0.3 0 PID 0.85KL/T 1.2T/KL 2L 0.5L 【范例 5-1】已知控制对象的传递函数模型为: G(s)= ) 5)(3)(1(10 +++s s s
题目:设计110序列检测器,当输入信号时输 出,否则 一、设计思路 我们采用Moore机完成这个功能。对于触发器的选择,为了简便我们选用D触发器以及基本的门电路完成基本设计。 二、时钟同步状态机 1根据题目要求我们得到下面的状态图 状态表示的意义Q X=0 X=1 输出Z 等待1的出现 A A B 0 出现1 B A C 0 出现11 C D C 0 出现110 D A B 1 * Q 2 转移输出表 01 Q Q输入X 输出Z X=0 X=1 00 00 01 0 01 00 11 0 11 10 11 0
10 00 01 1 01Q Q * * 3 状态图如图: 通过卡诺图化简可得 转移方程: 00111=Q Q Q Q X Q X * * += 输出方程:01 Z Q Q ? = 我们选择D 触发器作为记忆电路部分 由D 触发器的特征方程: Q D * = 得激励方程: 00111D =Q Q Q X D X += 三、V erilog 程序如下: module shiyan2 (clk,x,z); input clk,x; output z; wire[1:0] state;
wire[1:0] excite; nextlogic u1(x,state,excite); statememory u2(clk,excite,state); outputlogic u3(state,z); endmodule module statememory (clk,d,q); input clk; input[1:0] d; output[1:0] q; reg[1:0] q; always @ (posedge clk) begin q <= d; end endmodule module nextlogic (x,q,d); input x; input[1:0] q; output[1:0] d; assign d[0]=(q[1]&q[0])|(q[1]&x); assign d[1]=x; endmodule
实验三 PID 控制器设计及其参数整定 一、实验目的 1) 通过本实验,掌握使用Simulink 仿真设计连续和离散PID 控制器的方法。 2) 掌握对给定控制系统进行PID 控制器参数在线实验工程整定的方法。 二、实验原理 PID 控制是最经典、应用最广泛的控制方法,是单回路控制系统主要的控制方法,是其他控制思想的基础。本实验针对被控对象,选定控制器的调节规律,在控制器的调节规律已经确定的情况下,控制系统的品质主要决定于控制器参数的整定。 1. 连续PID 控制器 本实验采用的PID 控制器传递函数为: 111()(1)(1)C p d d i i G s K T S T S T S T S δ=+ +=++ 或写成: ()i C p d K G s K K S S =+ + 有 ,p i d p d i K K K K T T = = 其中K p 、K i 、K d 分别为比例系数、积分系数和微分系数;T i 、T d 分别为积分时间常数和微分时间常数;δ为比例度。 控制系统的Simulink 仿真图如图1所示。连续PID 控制器如图2所示。 根据不同的参数设置,可以得到单纯的比例控制、比例积分控制、比例微分控制以及比例积分微分控制等不同的控制系统。 控制器参数的工程整定实验法,是通过对典型输入响应曲线所得到的特征量,按照动态特性参数法、衰减曲线法、临界比例度法、或经验法中的某一种方法,求得控制器的各个参数,进行工程整定,使系统的性能达到最佳。
图1 控制系统Simulink 仿真图 图2 连续PID 控制器Simulink 仿真图 2. 离散PID 控制器 将描述模拟PID 控制器的微分方程式化为差分方程,即为数字PID 控制算法。 1 ()(1) ()()()k p i d i e k e k u k K e k K T e i K T =--=++∑ 因为上式包含的数字积分项,需要存储过去全部偏差量,而且累加运算编程不太方便,计算量也较大,所以在应用中,通常都是将上式改为增量算法。 ()()(1) ()2(1)(2)[()(1)]()p I D u k u k u k e k e k e k K e k e k K Te k K T ?=----+-=--++ 即 ()(1)()u k u k u k =-+?
八位序列检测器设计 摘要:序列检测器多用于通信系统中对禁用码的检测,或者是对所需信号的提取,即一旦检测到所需信号就输出高电平,这在数字通信领域有广泛的应运。本文介绍了一种采用单片PGA 芯片进行脉冲序列检测器的设计方法,主要阐述如何使用新兴的EDA 器件取代传统的电子设计方法,利用FPGA 的可编程性,简洁而又多变的设计方法,缩短了研发周期,同时使设计的电路体积更小功能更强大。本次课程设计设计出能够检测序列“”的序列检测器,并以此来描述序列检测器的设计过程和基于FPGA 的软件仿真。最后通过QuartusII 的波形输出对设计方案进行检测,在硬件调试经检测输出正确设计符合要求。 关键词: VHDL 序列检测QuartusⅡFPGA Abstract:Sequence detector system used for communication on the detection code disabled, or is the extraction of the desired signal, that is, once detected, the required high output signal, which in the broad field of digital communications to be transported. This paper presents a single FPGA chip with the detector pulse sequence design method, mainly on how to us e new device to replace the traditional EDA electronic design, the use of FPGA's programmability, concise and changing the design method shortens the development cycle, while allowing smaller circuit design and more powerful. The curriculum is designed to detect sequence "" sequence detectors, and detector in order to describe the sequence of the design process and FPGA- based software simulation. Finally, the output of the waveform QuartusII design testing, debugging the hardware design has been tested and meet the requirements of the correct output. Keywords:VHDL Sequence detection QuartusⅡFPGA
DATA-8205 信号隔离模块主要用于对工业设备的RS232/RS485通信接口的隔离保护,通过模块内部电路的电气隔离,可有效避免地线回路电压、浪涌、感应雷击、静电、热插拔、电磁干扰等因素造成的设备损坏。 设备特点: ◆工业级电磁隔离,能够提供高达2500Vrms的隔离电压。 ◆完整的保护方案能使RS-232/RS-485设备安装于任何复杂的工业环境而免除静电、雷击、电磁和浪涌对设备的干扰或损坏。 ◆用户可自主设定隔离串口类型。 ◆全透明通信,无须调试、即插即用。 ◆通信波特率自适应。 ◆体积小巧,安装方便。 产品型号DATA-8205 符合标准EIA/TIA RS-232C、RS-485国际标准 工作方式自定义串口类型 波特率300bps ~ 57600bps自适应 信号隔离2500V 电源隔离非隔离 传输介质双绞线或屏蔽线 工作电源9 ~ 30VDC宽压输入 响应时间≤ 10nm 安装方式DIN导轨安装(35mm) 适用环境即插即用 工作环境-40℃到 85℃,相对湿度为5%到95% 外壳材质工程塑料 外型尺寸100x25.4x74mm
DATA-8301 信号隔离模块是工业级电流信号隔离分配器,采用磁隔离技术保证隔离器的隔离功能:输入、输出、电源之间全隔离,能够屏蔽现场各种干扰信号和有害信号,同时保证输出信号不衰减,提供高精度信号。采集现场各类一次传感器或其他仪表输出的直流信号后,经隔离、抗干扰处理后输出,使得检测和控制回路信号的安全性和抗干扰能力大大增强,提高系统可靠性。 设备特点: ◆采用高精度采集芯片,精度高。 ◆兼容性强,可接入各种4~20mA输出的变送器及仪表。 ◆具备两路电流输入、两路隔离电流输出,可为变送器和仪表提供DC 12V/24V供电电源。 ◆体积小巧,标准DIN35导轨安装,节省空间、安装简便。 产品型号DATA-8301 工作电压:10V~30V DC 负载能力:0~250Ω 消耗功率:≤2W 工作精度:±0.2% 隔离耐压:1500VDC 绝缘电阻:>100MΩ 响应时间:200μS 电磁兼容:IEC61000-4-4:1995 环境温度:-30℃~ 85℃ 环境湿度: <90% 无结露
数字PID控制器设计 设计任务: 设单位反馈系统的开环传递函数为: 设计数字PID控制器,使系统的稳态误差不大于0.1,超调量不大于20%,调节时间不大于0.5s。采用增量算法实现该PID控制器。 具体要求: 1.采用Matlab完成控制系统的建立、分析和模拟仿真,给出仿真结果。 2.设计报告内容包含数字PID控制器的设计步骤、Matlab仿真的性能曲线、采样周期T的选择、数字控制器脉冲传递函数和差分方程形式。 3.设计工作小结和心得体会。 4.列出所查阅的参考资料。
数字PID控制器设计报告 一、设计目的 1 了解数字PID控制算法的实现; 2 掌握PID控制器参数对控制系统性能的影响; 3 能够运用MATLAB/Simulink 软件对控制系统进行正确建模并对模块进行正确的参数设置; 4 加深对理论知识的理解和掌握; 5 掌握计算机控制系统分析与设计方法。 二、设计要求 1采用增量算法实现该PID控制器。 2熟练掌握PID设计方法及MATLAB设计仿真。 三、设计任务 设单位反馈系统的开环传递函数为: 设计数字PID控制器,使系统的稳态误差不大于0.1,超调量不大于20%,调节时间不大于0.5s。采用增量算法实现该PID控制器。 四、设计原理 1.数字PID原理结构框图
2. 增量式PID 控制算法 ()()()()()01P I D i u k K e k K e i K e k e k ∞ ==++--????∑ =u(k-1)+Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)] =u(k-1)+(Kp+Ki+Kd)e(k)-(Kp+2Kd)e(k-1)+Kde(k-2) 所以Δu(k)=u(k)-u(k-1) =Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)] =(Kp+Ki+Kd)e(k)-(Kp+2Kd)e(k-1)+Kde(k-2) 整理: Δu(k)= Ae(k)-Be(k-1)+Ce(k-2) A= Kp+Ki+Kd B=-(Kp+2Kd ) C=Kd 五、Matlab 仿真选择数字PID 参数 (扩充临界比例度法/扩充响应曲线法 具体整定步骤) 利用扩充临界比例带法选择数字PID 参数,扩充临界比例带法是 以模拟PID 调节器中使用的临界比例带法为基础的一种数字 PID 参数的整定方法。其整定步骤如下:;
电子课程设计 ------序列检测器 学院: 专业班级: 姓名: 学号: 指导老师: 2012年12月
目录 一、设计任务与要求 (1) 二、总体框图 (1) 三、选择器件 (1) 四、功能模块 (1) 1、脉冲发生器 (1) 2、序列检测器 (2) 3、分频器 (3) 五、总体设计电路图 (5) 1、总体电路原理图 (5) 2、Q UARATU SII的仿真结果图与分析 (5) 3、管脚分配 (6) 4、E DA实验箱验证 (6)
序列检测器 一、任务与要求 设计一个序列检测器,在上升沿的作用下,输入一组二进制码,与预先设置的吗“11100101”一致时,输出A,不同时则输出B,(在检测过程中,任何一位不相等都将回到初始状态重新开始检测。) 二、总体框图 脉冲发生器:为检测器提供脉冲。 检测器:具有存储功能。 数码显示器:显示输出A或B 方案:设计手动的脉冲发生器为检测器提供脉冲,使其正常工作,然后设计检测器存储的数字为“11100101”再用译码器使其显示在数码管上,这就要求检测器必须记住前一次的正确吗及正确序列,直到在连续的检测中所收到的每一位吗与预置数的对应码相同,否则重新开始检测。 三、选择器件 芯片:EDA实验箱中EP1C12核心板;七段数码管等。 外围电路:将IO_CLK用导线连接到IO3上,将IO9,IO10用导线连接到两个LED灯上,接上电源下载完成即可验证。 四、功能模块 1.脉冲发生器 VHDL程序: LIBRARY ieee; use ieee.std_logic_1164.all; entity pulse is port(pul,M: in std_logic; nq,q: out std_logic --VGA:out std_logic_vector(3 downto 0) ); end pulse; architecture a of pulse is signal temp: std_logic; begin --VGA <= "0001";' q<=temp; nq<=not temp; process(m)
信号隔离器应用场合及使用原理 2008/3/6/09:04 1.信号隔离器的作用 (1)地环流干扰 在工业生产过程中实现监视和控制需要用到各种自动化仪表、控制系统和执行机构,他们之间的信号传输既有微弱到毫伏级、毫安级的小信号;又有几十伏,数千伏、数百安培的大信号;既有低频直流信号,也有高频脉冲信号等等,构成系统后往往发现在仪表和设备之间传输相互干扰,造成系统不稳定甚至误操作,出现这种情况除了每个仪器、设备本身的性能原因如抗电磁干扰影响,还有一个十分重要的原因就是各种仪器设备根据要求和目的都需要接地,例如为了安全,机壳需要接大地;为了使电路正常工作,系统需要有公共参考点;为了抑制干扰加屏蔽罩,屏蔽罩也需要接地,但是由于仪表和设备之间的参考点之间存在电势差(也就是各设备的共地点不同)因而形成“地环流”、“接地环流”问题是在系统处理信号过程中必须解决的问题。 (2)自然干扰 雷电是一种主要的自然干扰源,雷电产生的干扰可以传输到数千公里以外的地方。雷电干扰的时域波形是叠加在一串随机脉冲背景上的一个大尖峰脉冲。宇宙噪音是电离辐射产生的,在一天中不断变化。太阳噪音则随着太阳活动情况的剧烈变化。自然界噪声主要会对通讯产生干扰,而雷电能量尖蜂脉冲可以对很多设备造成损坏,应该加以避免或降低损坏程度,减少损失。 (3)人为干扰 电磁干扰产生的根本原因是导体中有电压或电流的变化,即较大dv/dt或di/dt.dv/dt或di/dt能够使导体产生电磁波辐射。一方面,人们可以利用这一特点实现特定功能,例如,无限通信、雷达或其他功能,另一方面,电子设备在工作时,由于导体中的dv/dt或di/dt会产生伴随电磁辐射。无论主观上出于什么目的,客观上对电磁环境造成了污染。还有工厂企业在生产过程中会经常有一些大型的设备(电机、变频器)频繁开关,他们也会造成一些容性、感性的干扰,也将影响仪器仪表正常显示或采集。凡是有电压电流突变的场合,肯定会有电磁干扰存在。数字脉冲电路就是一种典型的干扰源,随着电子技术的广泛应用,电磁污染情况会越来越严重. 2.解决各种干扰的方法 首先干扰的三要素是干扰源、敏感源和耦合路径,这三要素缺少一个,电磁兼容问题都不会存在。因此要从这三要素入手。找出最方便的解决方法,一般干扰源和敏感源是没办法解决的,通常是从耦合路径想办法,也是最常用的方法。如加屏蔽、加滤波等手段。而处理环流最常见也最为麻烦,现在以此为探讨话题。 (1)第一种方法;所有现场设备不接地,使所有过程环路只有一个接地点,不能形成回路,这种方法看似简单,但实际应用中往往很难实现,因为某些设备要求必须接地才能保证测量精度或人身安全,某些设备可能因为长期遭到腐蚀和磨损后或气候影响而形成新的接地点。
南通大学电工电子实验中心 电子系统综合设计实验报告 课题名称:峰值检测系统的设计 姓名:沈益 学号:07 指导教师:陈娟 实验时间:2011年1月3日至14日
峰值检测系统主要由传感器、放大器、采样/保持、采样/保持控制电路、A/D转换电路、数码显示、数字锁存控制电路组成。其关键任务是检测峰值并使之保持稳定,且用数字显示峰值。 一、设计目的 1、掌握峰值检测系统的原理; 2、掌握峰值检测系统的设计方法; 3、掌握峰值检测系统的性能指标和调试方法。 二、设计任务及要求 1、任务:设计一个峰值检测系统; 2、要求:(1)传感器输出0~5mV,对应承受力0~2000kg; (2)测量值要用数字显示,显示范围是0~1999; (3)测量的峰值的电压要稳定。 三、设计原理 1、设计总体方案 据分析,可确定需设计系统的电路原理框图如图1所示: 图1 峰值检测系统原理框图 2、各部分功能 传感器:将被测信号量转换成电量; 放大器:将传感器输出的小信号放大,放大器的输出结果满足模
数转换器的转换范围; 采样/保持:对放大后的被测模拟量进行采样,并保持峰值; 采样/保持控制电路:该电路通过控制信号实现对峰值采样,小于峰值时,保持原峰值,大于原峰值时保持新的峰值; A/D 转换:将模拟量转换成数字量; 译码显示:完成峰值数字量的译码显示; 数字锁存控制电路:对模数转换的峰值数字量进行锁存,小于峰值的数字量不锁存。 三、电路设计 1、传感器:本文不予考虑; 2、放大器:由于输出信号为0~5mV ,1mV 对应400kg ,因此选用电压增益为400的差动放大电路(该电路精度高),如图2所示。 u 1 u 2 u o1 图2 差动放大电路 根据公式 400R ) /R 2R (1R u u A 3 124i o1U =+-== ,分配第一级放大器放大倍数为8/R 2R 112=+,分配第二级放大器放大倍数为 508 400 R R 34==,则选取电阻值分别为 1.6K R 1=, 5.6K R 2=,2K R 3=,K 001R 4=,四只