机器人测控技术 大作业课程设计 课程设计名称:基于STM32的机械臂运动控制分析设计专业班级:自动1302 学生姓名:张鹏涛 学号:201323020219 指导教师:曹毅 课程设计时间:2016-4-28~2016-5-16 指导教师意见: 成绩: 签名:年月日 目录 摘要.............................................................................................................................. I V 第一章运动模型建立................................................................................................. V
1.1引言............................................................................................................. V 1.2机器人运动学模型的建立........................................................................... V 1.2.1运动学正解................................................................................... VII 第二章机械臂控制系统的总体方案设计............................................................. VIII 2.1机械臂的机械结构设计........................................................................... VIII 2.1.1臂部结构设计原则...................................................................... VIII 2.1.2机械臂自由度的确定..................................................................... I X 2.2机械臂关节控制的总体方案...................................................................... I X 2.2.1机械臂控制器类型的确定............................................................. I X 2.2.2机械臂控制系统结构...................................................................... X 2.2.3关节控制系统的控制策略.............................................................. X 第三章机械臂控制系统硬件设计............................................................................ X I 3.1机械臂控制系统概述.................................................................................. X I 3.2微处理器选型............................................................................................ XII 3.3主控制模块设计........................................................................................ XII 3.3.1电源电路....................................................................................... XII 3.3.2复位电路...................................................................................... XIII 3.3.3时钟电路...................................................................................... XIII 3.3.4 JTAG调试电路 ........................................................................... X IV 3.4驱动模块设计........................................................................................... X IV 3.5电源模块设计........................................................................................... X VI 第四章机械臂控制系统软件设计........................................................................XVII 4.1初始化模块设计......................................................................................XVII 4.1.1系统时钟控制.............................................................................XVII 4.1.2 SysTick定时器......................................................................... XVIII 4.1.3 TIM定时器 ................................................................................. X IX 4.1.4通用输入输出接口GPIO ............................................................ XX 4.1.5超声波传感器模块....................................................................... XX 总结........................................................................................................................... X XI 参考文献..................................................................................................................XXII 附录A .................................................................................................................... XXIII 附录B .................................................................................................................... XXIV
指导教师? 学生姓名?学号?班级?班 设计期间
设计前言 本设计是基于压片机设计构思启发?利用凸轮机构的间歇运动特性设计的压面装置?由于压面机的料斗后盖可以拆卸?所以我们可以对其后盖进行更改?从而可以根据自己喜好改变面条的粗细?而当调节压杆长短和后盖模具后我们又可把此装置改为压面片装置等等。所以可以说此装置对于家庭使用既是方便快捷?又省去了很多麻烦?经久耐用。本设计由于设计简单?对于冲压机构不做过多研究?主要设计的地方为减速器设计?像CAD主要为零件图-Ⅲ轴?零件图-大齿轮?减速器的升级版还有减速器的装配图。本说明书对于校核和论证最 多处也为减速器?因为此处结够是次装置的核心?所以编者对此做了过多研究下了很大的心血。 减速器装置还有其他连杆机构大多都是使用的便准件?都是按照机械设计手册规范?有许多参考文献可能由于时间比较久远?与现在的说明设计略有差别。由于要对零件进行校核?所以编者为了方便?规定了一些标准参数?像冲压力f=6000N 和实际略有差别?但此只是 基于设计论证方便。
已知数据 (03) 设计计算 (04) 机构系统运动方案 (04) 上冲头加压机构尺度综合 (04) 上冲头加压机构运动分析 (05) 上冲头加压机构受力分析 (06) 减速器设计 (08) 圆柱斜齿轮设计校核 (08) 锥齿轮设计校核 (10) V带传动装置设计校核.......................................... (13) 高速轴、中间轴、输出轴设计计算 (14) 轴承设计与寿命计算 (22) 键连接的设计计算 (26) 体会 (26) 参考资料 (27)
中原工学院 课程设计 课程名称:机械设计(上)课程审计 课程号:DB0302028 专业:机械设计制造及其自动化 班级:机自131班 学号:201300314103 学生姓名:刘旭东 指导教师:程军红 2015年06 月26 日题目:半自动平压模切机的模切设计 设计者:刘旭东 同组成员:王超凡、李俊熙 目录 <一>:课程设计任务 (2) <二>:执行机构的功能原理 (5) <三>:执行机构运动规律及型式设计 (5) <四>:主机构的运动设计 (10) <五>:执行系统的协调设计 (11) <六>:方案评价总结 (12) <七>:课程设计总结(体会) (12)
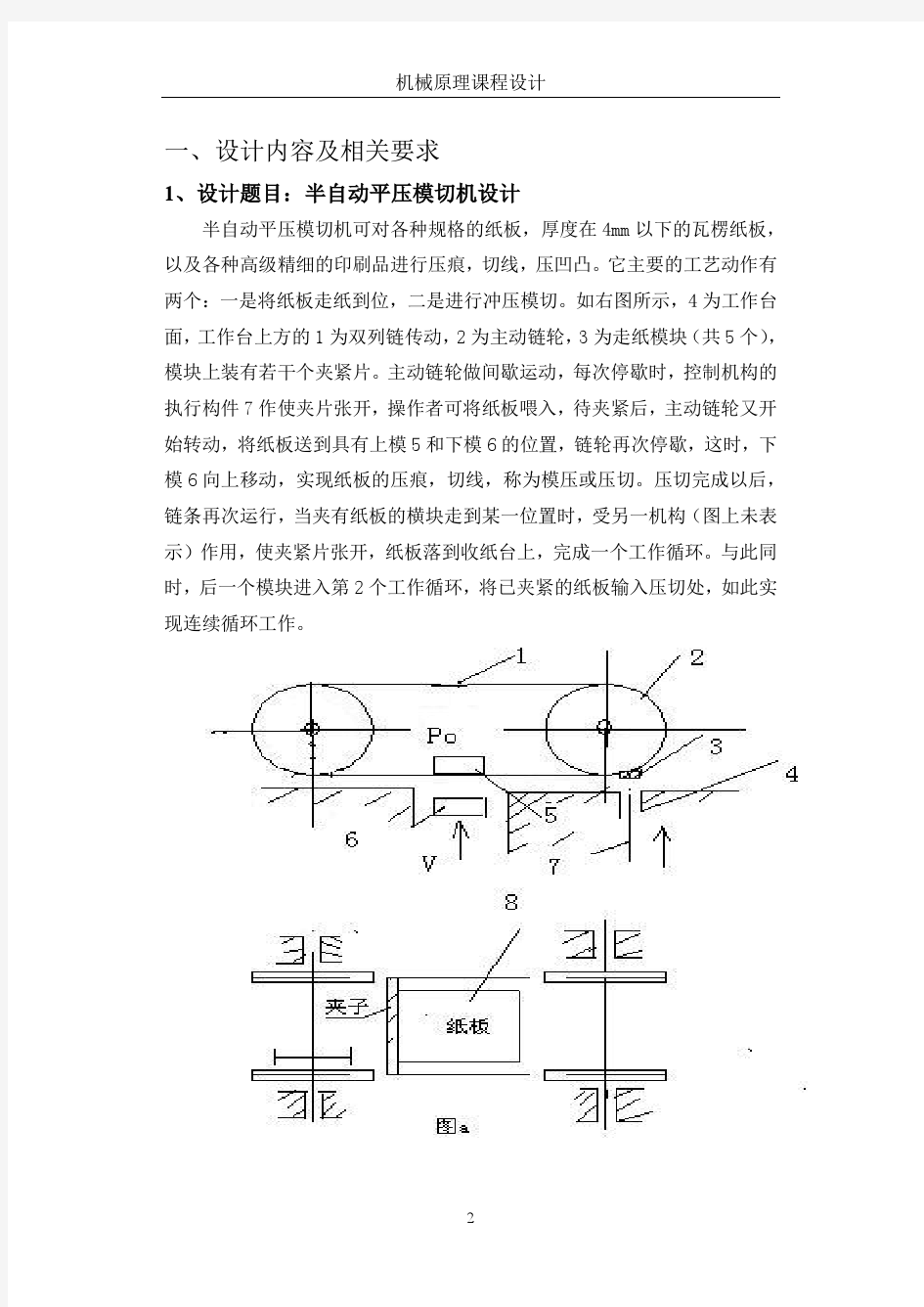
<八>:参考文献 (12) <九>附录 (12) <一>:课程设计任务 一、设计题目: 半自动平压模切机的模切机构 二、工作原理及工艺动作过程 半自动平压模切机是印刷、包装行业压制纸盒、纸箱等纸制品的专用设备.它可对各种规格的纸板、厚度在4mm以下的瓦愣纸板,以及各种高级精细的印刷品进行压痕、切线、压凹凸。经过压痕、切线的纸扳,用手工或机械沿切线处去掉边料后,沿着压出的压痕可折叠成各种纸盒、纸箱,或制成凹凸的商标。 压制纸板的工艺过程主要分两部分,一为将纸板走纸到位,二是对纸板冲压模切。如图一所示,4为工作台面,工作台上方的1为双列链传动,2为主动链轮,3为走纸模块,其两端分别固定在前后两根链条上,横块上装有若干个夹紧片。主动链轮由间歇机构带动,使双列链条作同步的间歇运动。每次停歇时,链上的一个走纸模块刚好运动到主动链轮下方的位置上。这时,工作台面下方的控制机构,其执行构件7作往复移动,推动横块上的夹紧装置,使夹紧片张开,操作者可将纸板8喂入,待夹紧后,主动链轮又开始转动,将纸板送到具有固定上模5和可动下模6的位置。链轮再次停歇。这时,在工作台面下部的的主传动系统中的执行构件(滑块)和下模6为一体向上移动,实现纸板的压痕、切线(称为模压或压切)、压切完成以后,
机械结构设计基础知识 1前言 1.1机械结构设计的任务 机械结构设计的任务是在总体设计的基础上,根据所确定的原理方案,确定并绘出具体的结构图,以体现所要求的功能。是将抽象的工作原理具体化为某类构件或零部件,具体内容为在确定结构件的材料、形状、尺寸、公差、热处理方式和表面状况的同时,还须考虑其加工工艺、强度、刚度、精度以及与其它零件相互之间关系等问题。所以,结构设计的直接产物虽是技术图纸,但结构设计工作不是简单的机械制图,图纸只是表达设计方案的语言,综合技术的具体化是结构设计的基本内容。 1.2机械结构设计特点 机械结构设计的主要特点有:(1)它是集思考、绘图、计算(有时进行必要的实验)于一体的设计过程,是机械设计中涉及的问题最多、最具体、工作量最大的工作阶段,在整个机械设计过程中,平均约80%的时间用于结构设计,对机械设计的成败起着举足轻重的作用。(2)机械结构设计问题的多解性,即满足同一设计要求的机械结构并不是唯一的。(3)机械结构设计阶段是一个很活跃的设计环节,常常需反复交叉的进行。为此,在进行机械结构设计时,必须了解从机器的整体出发对机械结构的基本要求 2机械结构件的结构要素和设计方法 2.1结构件的几何要素 机械结构的功能主要是靠机械零部件的几何形状及各个零部件之间的相对位置关系实现的。零部件的几何形状由它的表面所构成,一个零件通常有多个表面,在这些表面中有的与其它零部件表面直接接触,把这一部分表面称为功能表面。在功能表面之间的联结部分称为联接表面。 零件的功能表面是决定机械功能的重要因素,功能表面的设计是零部件结构设计的核心问题。描述功能表面的主要几何参数有表面的几何形状、尺寸大小、表面数量、位置、顺序等。通过对功能表面的变异设计,可以得到为实现同一技术功能的多种结构方案。 2.2结构件之间的联接 在机器或机械中,任何零件都不是孤立存在的。因此在结构设计中除了研究零件本身的功能和其它特征外,还必须研究零件之间的相互关系。 零件的相关分为直接相关和间接相关两类。凡两零件有直接装配关系的,成为直接相关。没有直接装配关系的相关成为间接相关。间接相关又分为位置相关和运动相关两类。位置相关是指两零件在相互位置上有要求,如减速器中两相邻的传动轴,其中心距必须保证一定的精度,两轴线必须平行,以保证齿轮的正常啮合。运动相关是指一零件的运动轨迹与另一零件有关,如车床刀架的运动轨迹必须平行于于主轴的中心线,这是靠床身导轨和主轴轴线相平行来保证的,所以,主轴与导轨之间位置相关;而刀架与主轴之间为运动相关。 多数零件都有两个或更多的直接相关零件,故每个零件大都具有两个或多个部位在结构上与其它零件有关。在进行结构设计时,两零件直接相关部位必须同时考虑,以便合理地选择材料的热处理方式、形状、尺寸、精度及表面质量等。同时还必须考虑满足间接相关条件,如进行尺寸链和精度计算等。一般来说,若某零件直接相关零件愈多,其结构就愈复杂;零件的间接相关零件愈多,其精度要求愈高。例如,轴毂联接见图1。 2.3结构设计据结构件的材料及热处理不同应注意的问题 机械设计中可以选择的材料众多,不同的材料具有不同的性质,不同的材料对应不同的加工工艺,结构设计中既要根据功能要求合理地选择适当的材料,又要根据材料的种类确定适当的加工工艺,并根据加工工艺的要求确定适当的结构,只有通过适当的结构设计才能使所选择的材料最充分的发挥优势。 设计者要做到正确地选择材料就必须充分地了解所选材料的力学性能、加工性能、使用成本等信息。结构设计中应根据所选材料的特性及其所对应的加工工艺而遵循不同的设计原则。
螺旋压面器设计说明书 目录 机构示意图 (1) 技术要求 (1) 主要参数 (1) 传动方案的分析和拟订 (1) 传动机构 (1) 机械传动可用来实现的功能 (1) 螺旋传动的分类 (2) 动力选择 (2) 工作原理 (2) 装置主要零件和连接的设计 (2) 压面器压盖的设计 (2) 螺杆与推板连接的设计 (3) 压面器手柄的设计 (3) 压面器出面口的设计 (3) 装置材料的选择 (4) 零件尺寸的设计计算 (4) 螺旋传动的螺杆与螺母的计算 (4) 底板平头螺钉的计算 (5) 螺旋压面器设计装配图 (5)
设计小结 (5) 参考文献 (5) 螺旋压面器设计说明书 随着人们生活水平的提高,越来越多的创新设计应用到了人们的衣食住行,极大的方便了我们的生活,螺旋压面器便是其中的一例,通过使用螺旋压面器,可以很方便的压出面条,不但节省了时间和体力,而且压出的面条也不错,不过,现有的螺旋压面器还是存在一些缺点,如压出的面只有圆形而且粗细不可以改变,压盖螺母需要旋拧比较费事,握柄不能折叠比较占地方,不便于存放等等,所以我准备对现有的螺旋压面器进行改进,使之能够更加方便我们的生活。 机构示意图 技术要求:出面尺寸和形状可变,压盖螺母可快速联结,握柄可折叠。 主要参数:旋转手柄扭矩T=10 Nm 最大行程hmax=160 mm 传动方案的分析和拟定 传动机构 传动机构是把原动机的动力和运动传送到执行机构的传动装置。以传递动力为主的传动又称为动力传动。以传递运动为主的运动传动。机械传动是最常见的一种传动形式。 在机械传动系统中,原动机的动力和运动传递给执行机构,使之实现预定动作(包括运动和动力)的装置。它由各种传动元件或装置,轴及轴系部件,离合,制动,换向和蓄能(如飞轮)等元件组成。 机械传动可用来实现的功能:
《机械设计基础》作业答案 第一章 平面机构的自由度和速度分析 1-1 1-2 1-3 1-4 1-5 自由度为: 或: 1-6 自由度为 或: 1-10 自由度为: 或: 1-11 1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。 1-14:求出题1-14图正切机构的全部瞬心。设s rad /101=ω,求构件3的速度3v 。 1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。 构件1、2的瞬心为P 12 P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心
1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=, s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。 在三角形ABC 中, BCA AB BC ∠= sin 45sin 0 ,52sin = ∠BCA ,5 23cos =∠BCA , 0 45 sin sin BC ABC AC =∠,mm AC 7.310≈ 1-17:题1-17图所示平底摆动从动件凸轮1为半径20=r 的圆盘,圆盘中心C 与凸轮回转中心的距离mm l AC 15=,mm l AB 90=,s rad /101=ω,求00=θ和0180=θ时,从动件角速度2ω的数值和方向。 00=θ时 方向如图中所示 当0180=θ时 方向如图中所示
第二章 平面连杆机构 2-1 试根据题2-1图所注明的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。 (1)双曲柄机构 (2)曲柄摇杆机构 (3)双摇杆机构 (4)双摇杆机构 2-3 画出题2-3图所示各机构的传动角和压力角。图中标注箭头的构件为原动件。 2-4 已知某曲柄摇杆机构的曲柄匀速转动,极位夹角θ为300,摇杆工作行程需时7s 。试问:(1)摇杆空回程需时几秒?(2)曲柄每分钟转数是多少? 解:(1)根据题已知条件可得: 工作行程曲柄的转角01210=? 则空回程曲柄的转角02150=? 摇杆工作行程用时7s ,则可得到空回程需时: (2)由前计算可知,曲柄每转一周需时12s ,则曲柄每分钟的转数为 2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆100,且mm l mm l AD CD 1000,500==。(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)'计算此机构的最小传动角。 解: 以踏板为主动件,所以最小传动角为0度。 2-6 设计一曲柄摇杆机构。已知摇杆长度mm l 1003=,摆角030=ψ,摇杆的行程速比变化系数2.1=K 。(1)用图解法确定其余三杆的尺寸;(2)用式(2-6)和式(2-6)'
目录 摘要 (1) 关键词 (1) 1 前言 (1) 2 总体结构 (2) 3 压辊的设计 (4) 3.1 压辊的结构和规格 (4) 3.2 压辊的轴承 (4) 3.3 压辊与轴系零件的连接 (4) 3.4 压辊的表面技术参数 (5) 3.4.1 齿数 (5) 3.4.2 压齿的斜度 (5) 3.4.3 齿形 (5) 3.4.4 压辊的表面参 (5) 3.4.5 在选择辊速时考虑的因素 (6) 3.4.6 横压力 (6) 3.4.7 压辊的清理及冷却 (6) 4 进料机构 (6) 4.1 进料板 (7) 5 切面棍 (7) 6 计算部分 (7) 6.1 传动设计、选配电机 (7) 6.1.1 传动方案的拟定 (7) 6.1.2 电机的选择 (7)
6.1.3 V带的设计 ··························································错误!未定义书签。 6.1.4 双面圆弧同步带的设计·····································错误!未定义书签。 6.2 压延辊齿轮传动设计计算···········································错误!未定义书签。 6.2.1 选用齿轮类型、精度等级、材料及齿数·········错误!未定义书签。 6.2.2 按齿面接触强度设计K1T1································错误!未定义书签。 6.2.3 按齿根弯曲强度设计·········································错误!未定义书签。 6.2.4 几何尺寸计算·····················································错误!未定义书签。 6.3 压辊和切面棍受力分析···············································错误!未定义书签。 6.3.1 结构设计·····························································错误!未定义书签。 6.3.2 压辊受力分析及校核·········································错误!未定义书签。 6.4压辊轴承的选择计算 (8) 6.4.1 压辊轴承的选择 (8) 6.4.2 轴承校核设计 (8) 7 结论 (9) 参考文献 (9) 致谢 (18)
半自动平压模切机设计说明书 一、 设计目的 通过本课程设计将学过的基础理论知识进行综合应用,着手设计“半自动平压模切机”。通过对机构的选型、设计;对机械传动方案、机械运动方案的选择和评价而培养结构设计,计算能力。熟悉一般的机械装置设计过程。 二、 工作原理及工艺动作过程 半自动平压模切机是印刷,包装行业压制纸盒、纸箱制品的专用设备。它可以对各种规格的纸板、厚度在4mm 一下的瓦楞纸板,以及各种高级精细的印刷品进行压痕、切线、压凹凸。经过压痕、切线的纸板,用手工或机械沿切线除去掉边料后,沿压出的压痕可折叠成各种纸盒、纸箱,或制成凹凸的商标。 它的工艺动作主要有两个:一是将纸板走纸到位,二是进行冲压模切。其具体工作动作顺序如下: 半自动平压模切机工艺动作顺序 三、 运动循环图 印 刷 纸 板 夹紧纸板 输入走纸 模切冲压 输出走纸 松开走纸 纸盒余 料
(一)机构运动要求 从机器的工艺动作可以看出,可以把整个机构运动的运动分成两个部分,一是辅助运动,它可以用于完成纸板的夹紧,走纸,松开等动作。对实现该运动的传动机构要求做间歇运动;二是主运动,完成对纸板的压切动作,要求装有模板的滑块做直线往复运动。其特点是行程短,受载大。本机构要求行程是50毫米,最大载荷是错误!未找到引用源。,工作速度是每小时压制3000张。另外,主运动和辅运动要相互协调。 (二)运动示意图 由上述机构运动要求,绘制如下运动示意草图: 模切机构主轴夹紧装置 夹紧装置 走纸机构
(三)各部件运动分析 1、主轴的选择和转角运算 为了计算和设计方便,选择变速箱的输出轴为运动分析主轴,如上图所示。由原始数据和设计要求知,平面六杆机构的行程速比系数K=1.3,则极位夹角错误!未找到引用源。°并知该运动周期分为两部分,以156.5°(156.5°=180°-23.5°)为界分为0°---156.5°和156.5°--360°两个过程。 2、模切机构的分析 当主轴转角为0°---156.5°,下模从行程最低点开始,在平面六杆机构的带动下向上移动至预定模切位置,进行冲压模切;当主轴转角为156.5°--360°,下模完成模切动作,快速急回运动至行程最低点即下一周期起点。 3、走纸机构的分析 当主轴转角为0°---156.5°,特殊齿轮组(用于完成间歇运动)没有啮合运动,链轮链条处于静止状态;当主轴转角为156.5°--360°,特殊齿轮组轮齿参与啮合,带动链轮链条运动,进行走纸运动。 4、夹紧装置的分析 当主轴转角为0°---156.5°,带动夹子的凸轮走过推程,远休止和回程使刚性弹簧夹完成夹纸动作;当主轴转角为156.5°--360°,凸轮处于近休止状态使刚性弹簧夹处于夹紧状态。 (四)综上所述运动循环图如下: 主轴转角0°156.5°(图示位置) 360°走纸机构停止运动
螺旋压面器设计说明书 目录 姚都 (中北大学机械工程与自动化学院04021404班28号,山西太原 030051) 机构示意图 (1) 技术要求 (1) 主要参数 (1) 传动方案的分析和拟订 (1) 传动机构 (1) 机械传动可用来实现的功能 (1) 螺旋传动的分类 (2) 动力选择 (2) 工作原理 (2) 装置主要零件和连接的设计 (2) 压面器压盖的设计 (2) 螺杆与推板连接的设计 (3) 压面器手柄的设计 (3) 压面器出面口的设计 (3) 装置材料的选择 (4) 零件尺寸的设计计算 (4) 螺旋传动的螺杆与螺母的计算 (4) 底板平头螺钉的计算 (5) 螺旋压面器设计装配图 (5) 设计小结 (5) 参考文献 (5)
螺旋压面器设计说明书 姚都 (中北大学机械工程与自动化学院04021404班28号,山西太原 030051) 随着人们生活水平的提高,越来越多的创新设计应用到了人们的衣食住行,极大的方便了我们的生活,螺旋压面器便是其中的一例,通过使用螺旋压面器,可以很方便的压出面条,不但节省了时间和体力,而且压出的面条也不错,不过,现有的螺旋压面器还是存在一些缺点,如压出的面只有圆形而且粗细不可以改变,压盖螺母需要旋拧比较费事,握柄不能折叠比较占地方,不便于存放等等,所以我准备对现有的螺旋压面器进行改进,使之能够更加方便我们的生活。 机构示意图 技术要求:出面尺寸和形状可变,压盖螺母可快速联结,握柄可折叠。 主要参数:旋转手柄扭矩T=10 Nm 最大行程h max=160 mm 传动方案的分析和拟定 传动机构 传动机构是把原动机的动力和运动传送到执行机构的传动装置。以传递动力为主的传动又称为动力传动。以传递运动为主的运动传动。机械传动是最常见的一种传动形式。 在机械传动系统中,原动机的动力和运动传递给执行机构,使之实现预定动作(包括运动和动力)的装置。它由各种传动元件或装置,轴及轴系部件,离合,制动,换向和蓄能(如飞轮)等元件组成。 机械传动可用来实现的功能: 降低或增高原动机输出的速度,以适合执行机构的需要; 采用变速传动来满足执行机构的经常变速要求; 将原动机输出的转距,变换为执行机构的所需要的转距或力; 将原动机输出的等速旋转运动转变为执行机构所要求的,其速度按某种规律变化的旋转或非旋转运动;
工业机器人球坐标机械臂结构设计 摘要 在装配机器人中,球坐标型装配机器人(极坐标型)是应用非常广泛的一种装配机器人。本文设计的工业机器人既可以用于实际生产,又可以用于教学实验和科学研究。用于实际生产,它能够满足装配作业内容改变频繁的要求,用于教学实验,它能够使人更直观地了解机器人机构组成、动作原理等,所以开发球坐标型机器人具有广泛的实际和应用前景,本课题的研究工作正是在这样的背景下提出来的。 本文设计的工业机器人球坐标型机械臂具有下列特点:通用性好、重复定位精度高、体积小、重量轻、外形美观、适于观察、成本低,对其本体的可行方案进行了充分的论证后,设计成具有三自由度的结构,由机身、大臂及小臂组成,行星齿轮减速器、同步齿型带、丝杠螺母等组成了工业机器人球坐标型机械臂简单可靠的传动方案,该机器人的三个关节均选用直流伺服电机驱动。 关键词工业机器人;极坐标型机械臂;球坐标型机械臂/结构设计
Industrial Robot Spherical Coordinates Robotic Arm Structure Design ABSTRCT In assembly robots, ball coordinates type assembly robot (namely polar type) is a kind of very extensive assembly robot. The paper presents the desion of industrial robot can be used either for practical production,and can be used in experiment teaching and scientific research.Applied to practical production.It can satisfy the assembly work content change frequent requirements,used in teaching experiments.It can make a person more intuitively understand robot mechanism composition,action principle,etc.Therefore, the development goals coordinates type of robot has extensive practical and application prospects of this topic research work,and it is in this context brought out. The paper presents the design of industrial robot ball coordinates type has the following characteristics: the mechanical arm high universality,repositioning high precision,small volume,light weight,good appearance,suitable for observation,low cost and feasible scheme for its ontology adequate argument,designed to have three degrees of freedom,the fuselage,big structure composed,planets and forearm arm,and synchronizing gear reducer cog-type belt,screw nuts etc the industrial robot mechanical arm ball coordinates type a simple and reliable transmission scheme,the robot are chosen for the three joint dc servo motor driver. KEY WORDS Industrial robot/polar type mechanical arm/ball coordinates type mechanical arm/structure design
半自动平压模切机机构设计 一、设计题目 设计半自动平压模切机的模切机构。半自动平压模切机是印刷、包装行业压制纸盒、纸箱等纸制品的专用设备,该机可对各种规格的白纸板、厚度在4mm以下的瓦愣纸板,以及各种高级精细的印刷品进行压痕、切线。压凹凸。经过压痕、切线的纸扳,用手工或机械沿切线处去掉边料后,沿着压出的压痕可折叠成各种纸盒、纸箱,或制成凹凸的商标。 压制纸板的工艺过程分为“走纸”和“模切”两部分。如图3-1所示,4为工作台面,工作台上方的1为双列链传动,2为主动链轮,3为走纸模块(共五个)其两端分别固定在前后两根链条上,横块上装有若干个夹紧片。主动链轮由间歇机构带动,使双列链条作同步的间歇运动。每次停歇时,链上的一个走纸模块刚好运动到主动链轮下方的位置上。这时,工作台面下方的控制机构,其执行构件7作往复移动,推动横块上的夹紧装置,使夹紧片张开,操作者可将纸板8喂入,待夹紧后,主动链轮又开始转动,将纸板送到具有上模5(装调以后是固定不动的)和下模6的位置。链轮再次停歇。这时,在工作台面下部的的主传动系统中的执行构件—滑块6和下模为一体向上移动,实现纸板的压痕、切线,称为模压或压切。压切完成以后,链条再次运行,当夹有纸板的模块走到某一位置时,受另一机构(图上未表示)作用,使夹紧片张开,纸板落到收纸台上,完成一个工作循环。与此同时,后一个横块进人第二个工作循环。将已夹紧的纸板输入压切处,如此实现连续循环工作。 本题要求按照压制纸板的工艺过程设计下列几个机构:使下压模运动的执行机构,起减速作用的传动机构;控制横块上夹紧装置(夹紧纸板)的控制机构。 图 3-1 图 3-2 二、原始数据和设计要求 1、每小时压制纸板3000张。 2、传动机构所用电动机转速n=1450r/min,滑块推动下模向上运动时所受生产阻力如图3-2所示,图中p c=2×106N,回程时不受力,回程的平均速度为工作行程平均速度的1.3倍,下模移动的行程长度H=50±0.5mm。下模和滑块的质量约120kg。 3、工作台离地面的距离约1200mm。 4、所设计机构的性能要良好,结构简单紧凑,节省动力,寿命长,便于制造。 三、设计方案及讨论 根据半自动平压模切机的工作原理,把机器完成加工要求的动作分解成若干种基本运动。进行机械运动方案设计时,最主要的是要弄清设计要求和条件,掌握现有机构的基本性能,应用现有机构或有创造性地构思新的机构,以保证机器有完善的功能和尽可低的成本。
题目 压面机结构设计 系别: 专业: 班级: 学号: 学生姓名: 起讫日期: 指导教师:职称:系主任: 审核日期:
摘要 随着人们生活水平的提高,越来越多的创新设计应用到了人们的衣食住行,极大的方便了我们的生活。伴随着经济社会的迅猛发展过程中,由于人类过分追求发展所带来的满足和发展的速度而忽视或淡薄了其所带来的负面效应,即使在极大满足自身物欲的同时,也给自身未来的发展埋下了诸多隐患,这些问题随着时间的推移暴露越来越明显,直至威胁到人类自身的生存,如温室效应的出现、水污染等问题。在某种程度上,这些问题都归于人们对发展的片面理解,认为只要经济发展了,一切问题都可以迎忍而解,忽视了环境保护。事实上,只有科学的发展才能不断解决人类所面对的问题。面机便是其中的一例,通过使用压面机,可以很方便的压出面条,不但节省了时间和体力,而且压出的面条也不错。 我根据我大学所学的知识,对一种手压式压面机进行深入的介绍和分析,设计了一款全新的压面机。利用我们在学所学的UG和CAD软件对压面机进行结构设计,并用CAD对压面机进行工程出图。压面机,采用手动作为动力源,具有结构简单,质量可靠,方便维修等特点,量生产可获得比较高的经济效益。 关键词:压面机、设计、UG软件
Abstract With the rapid economic and social development process, due to the excessive pursuit of human development brings speed to meet and develop their neglect or weak the adverse effects, even in the great meet their material desires, but also to their own future development laid a lot of problems, these problems over time exposed more and more obvious, until the threat to the survival of human beings, such as the emergence of the greenhouse effect, pollution and other issues. To some extent, these problems are attributed to the development of a one-sided understanding of the people, as long as the economy develops, all problems can tolerate and welcome solution, ignoring environmental protection. In fact, only the development of science in order to continue to solve the problems facing humanity. According to the knowledge I have learned my university, for a hands-pressure pressing machine in-depth description and analysis, designed a new pressing machine. In school we learned the use of CAD software UG and pressing machine for structural design and use CAD for pressing machine works out the map. Pressing machine, using the manual as a power source, has a simple structure, reliable, easy maintenance, high volume production and availability of money. Keywords: pressing machine, design, UG Software
机械设计的结构要素 一、机械结构件的结构要素与设计方法 1、1 结构件的几何要素 机械结构的功能主要就是靠机械零部件的几何形状及各个零部件之间的相对位置关系实现的。零部件的几何形状由它的表面所构成,一个零件通常有多个表面,在这些表面中有的与其它零部件表面直接接触,把这一部分表面称为功能表面。在功能表面之间的联结部分称为联接表面。 零件的功能表面就是决定机械功能的重要因素,功能表面的设计就是零部件结构设计的核心问题。描述功能表面的主要几何参数有表面的几何形状、尺寸大小、表面数量、位置、顺序等。通过对功能表面的变异设计,可以得到为实现同一技术功能的多种结构方案。 1、2 结构件之间的联接 在机器或机械中,任何零件都不就是孤立存在的。因此在结构设计中除了研究零件本身的功能与其它特征外,还必须研究零件之间的相互关系。 零件的相关分为直接相关与间接相关两类。凡两零件有直接装配关系的,成为直接相关。没有直接装配关系的相关成为间接相关。间接相关又分为位置相关与运动相关两类。位置相关就是指两零件在相互位置上有要求,如减速器中两相邻的传动轴,其中心距必须保证一定的精度,两轴线必须平行,以保证齿轮的正常啮合。运动相关就是指一零件的运动轨迹与另一零件有关,如车床刀架的运动轨迹必须平行于于主轴的中心线,这就是靠床身导轨与主轴轴线相平行来保证的,所以,主轴与导轨之间位置相关;而刀架与主轴之间为运动相关。 多数零件都有两个或更多的直接相关零件,故每个零件大都具有两个或多个部位在结构上与其它 零件有关。在进行结构设计时,两零件直接相关部位必须同时考虑,以便合理地选择材料的热处理方式、形状、尺寸、精度及表面质量等。同时还必须考虑满足间接相关条件,如进行尺寸链与精度计算等。一般来说,若某零件直接相关零件愈多,其结构就愈复杂;零件的间接相关零件愈多,其精度要求愈高。 1、3 结构设计据结构件的材料 机械设计中可以选择的材料众多,不同的材料具有不同的性质,不同的材料对应不同的加工工艺, 结构设计中既要根据功能要求合理地选择适当的材料,又要根据材料的种类确定适当的加工工艺,并根据加工工艺的要求确定适当的结构,只有通过适当的结构设计才能使所选择的材料最充分的发挥优势。 设计者要做到正确地选择材料就必须充分地了解所选材料的力学性能、加工性能、使用成本等信息。结构设计中应根据所选材料的特性及其所对应的加工工艺而遵循不同的设计原则。
课程设计任务 书 半自动平压模切机是印刷、包装行业压制纸盒、纸箱等纸制品的专用设备。该 机可对各种规格的白纸板、厚度在4mm以下的瓦楞纸板,以及各种高级精细的印刷 品进行压痕、切线,沿切线去掉边料后,可以沿着压出的压痕折叠成各种纸盒、纸 箱,或压制成凸凹的商标和印刷品。 压制纸板的工艺过程分为“走纸”和“模切”两部分,如图(a)所示,4为工 作台面,工作台上方的1为双排链传动,2 为主动链轮,3为走纸横模块(共五个), 其两端分别固定在两根链条上,模块上装有若干个夹紧片。主动链轮由间歇机构带 动,使双排链条作同步的间歇运动。每次停歇时,链上的一个走纸横模块刚好运行 到主动链轮下方的位置上。这时,工作台面下方的执行构件7 作往复移动,推动模块上的夹紧装置,使夹紧片张开,操作者可将纸板8 喂入,待夹紧后,主动链轮又 开始转动,将纸板送到上模5(装调以后是固定不动的)和下模6 的位置,链轮再次 停歇。这时,在工作台而下方的主传动系统中的执行构件——滑块和下模为一体向 上移动,实现纸板的压痕、切线,这一过程称为模压或压切。压切完成以后,链条再 次运行,当夹有纸板的模块走到某一位置时,受另一机构(图上未表示)作用,使 夹 紧片张开,纸板落到收纸台上,完成一个工作循环。图(b)为阻力线图。 2.设计数据 (1)每小时压制纸板3000 张。 (2)传动机构所用电动机转速n = 1450r/min;滑块推动下模向上运动时所受生 产阻力如图(b)所示,工作阻力Fr = 2000kN,回程时不受力;行程速比系数K=; 下模移动的行程H= 50 土0.5mm下模和滑块的质量约120kg。