MATLAB模型预测控制工具箱函数 8.2 系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2 模型建立与转换函数 8.2.1 模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型; ⑤MPC传递函数模型。
在上述5种模型格式中,前两种模型格式是MATLAB通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC状态空间模型和MPC传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC状态空间模型之间的转换 MPC状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod()和mod2ss()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC状态空间模型函数ss2mod() 该函数的调用格式为 pmod= ss2mod(A,B,C,D) pmod= ss2mod(A,B,C,D,minfo) pmod= ss2mod(A,B,C,D,minfo,x0,u0,y0,f0) 式中,A, B, C, D为通用状态空间矩阵; minfo为构成MPC状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆minfo(1)=dt,系统采样周期,默认值为1; ◆minfo(2)=n,系统阶次,默认值为系统矩阵A的阶次; ◆minfo(3)=nu,受控输入的个数,默认值为系统输入的维数; ◆minfo(4)=nd,测量扰的数目,默认值为0; ◆minfo(5)=nw,未测量扰动的数目,默认值为0; ◆minfo(6)=nym,测量输出的数目,默认值系统输出的维数; ◆minfo(7)=nyu,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o,则取默认值。 x0, u0, y0, f0为线性化条件,默认值均为0; pmod为系统的MPC状态空间模型格式。 例8-5将如下以传递函数表示的系统模型转换为MPC状态空间模型。 解:MATLAB命令如下:
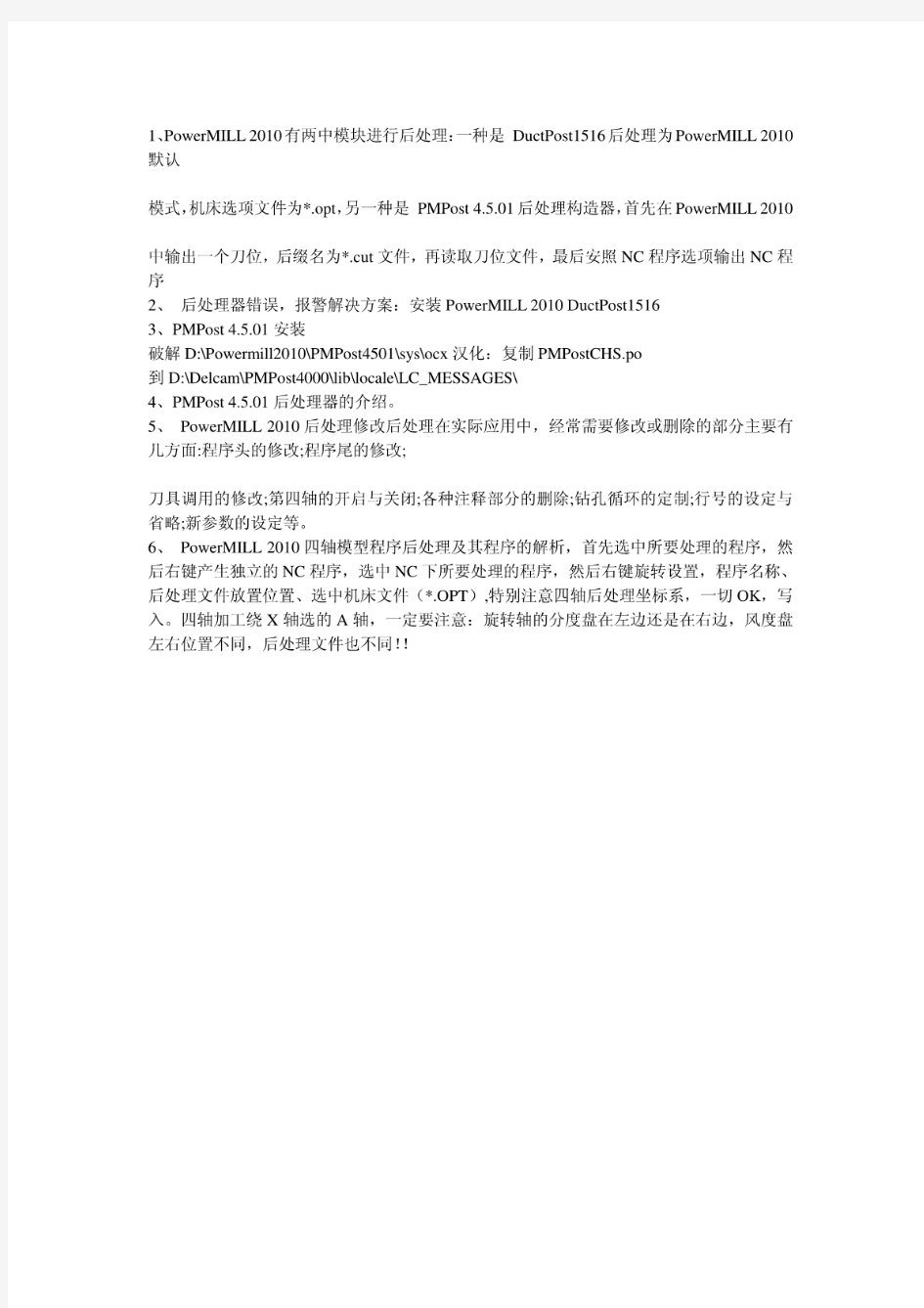
HIV职业暴露后处理流程图
1.用肥皂液和流动水清洗污染的皮肤,用生理盐水洗粘膜。 2.轻轻挤压伤口旁端,尽可能挤出损伤处的血液,再用肥皂液和流动水进行冲洗;禁止进行伤口的局部挤压。 3.受伤部位冲洗后,用75%乙醇或%碘伏进行消毒,包扎伤口;被暴露的粘膜,反复用生理盐水冲洗干净。 报告医院领导,填写报告卡,到疾控中心就诊咨询由本单位专人和/或当地疾控预防控制机构完成:暴露的级别:一级、二级、三级暴露源类型:轻度、重度和暴露源不明 在充分了解利弊的基础上,在暴露后尽快由被暴露者自愿选择按基本用药程序或强化用药程序使用预防性药物。 医疗机构应在暴露发生后抽血留底,在自愿的基础上进行HIV 本底检测,并于第4周、第8周、第12周及6个月时对艾滋病病毒抗体进行检测,对服用药物的毒性进行监控和处理,观察和记录艾滋病病毒感染的早期症状等;做好相关人员的咨询和心理支持。 机构对暴露情况进行登记按要求汇总上报 登记与上报随访与咨询预防性用药评估与分级马上报告专人负责严格保密报告医院领导,填写报告卡,到疾控中心就诊咨询由本单位专人和/或当地疾控预防控制机构完成:暴露的级别:一级、二级、三级暴露源类型:轻度、重度和暴露源不明机构对暴露情况进行登记按要求汇总上报医疗机构应在暴露发生后抽血留底,在自愿的基础上进行HIV本底检测,并于第4周、
第8周、第12周及6个月时对艾滋病病毒抗体进行检测,对服用药物的毒性进行监控和处理,观察和记录艾滋病病毒感染的早期症状等;做好相关人员的咨询和心理支持。在充分了解利弊的基础上,在暴露后尽快由被暴露者自愿选择按基本用药程序或强化用药程序使用预防性药物。
第40卷第5期 2006年5月 上海交通大学学报 J OU RNAL OF SHAN GHA I J IAO TON G UNIV ERSIT Y Vol.40No.5 May 2006 收稿日期:2005206208 作者简介:周平方(19762),男,湖南常宁人,博士生,主要从事实时系统、计算机控制系统等研究,E 2mail :zhoupf @https://www.doczj.com/doc/624887343.html,. 谢剑英(联系人),男,教授,博士生导师,电话(Tel.):021*********. 文章编号:100622467(2006)0520838205 实时控制系统一种基于模型预测控制的反馈调度 周平方, 谢剑英 (上海交通大学自动化系,上海200030) 摘 要:提出一种基于模型预测控制(M PC )的反馈调度算法(FS 2M PC ),可以在有限计算资源的 情况下改进实时控制系统的性能.将被控的实时调度过程模型化为受约束的任务集密度控制问题.在FS 2MPC 算法中,约束条件保证任务集在最早截止时限优先(EDF )算法下是可调度的;同时,M PC 的优化目标通过减小控制任务的截止时限使整个任务集的密度尽可能接近100%,从而提高控制任务的优先级,降低输出抖动.仿真结果表明,在有限计算资源的情况下,FS 2M PC 显著地降低了由调度过程引起的控制性能损失. 关键词:实时控制系统;反馈调度;模型预测控制;最早截止时限优先中图分类号:TP 273 文献标识码:A A Model Predictive Control 2Based Feedback Scheduling for Real 2T ime Control Systems Z HOU Pi ng 2f ang , X I E J i an 2y i ng (Dept.of Automation ,Shanghai Jiaotong Univ.,Shanghai 200030,China ) Abstract :A feedback scheduling based on model p redictive control (FS 2M PC )was presented to improve t he cont rol performance of real 2time control system subject to limited comp utational resource.The controlled real 2time scheduling is modelled as a const rained density cont rol p roblem of t he total task set.In t he FS 2M PC ,t he const raint s guarantee t hat t he task set is schedulable by EDF (earliest deadline first )algorit hm.At t he same time ,t he optimization goal of M PC (model p redictive cont rol )makes t he density of t he total task set as clo se to 1as po ssible t hrough shortening cont rol tasks ’deadlines.As a result ,t he cont rol tasks obtain higher p riorities and t he outp ut jitter is reduced.The simulation result s illust rate t hat t he schedu 2ling induced control performance lo ss is reduced greatly by t he FS 2M PC subject to limited comp utational resource. Key words :real 2time cont rol system ;feedback scheduling (FS );model p redictive control (M PC );earliest deadline first (EDF ) 现代实时控制系统(R TCS )通常是基于一个实时内核,多个闭环控制任务在内核的基础上竞争性地使用共享的处理器时间.因此,处理器的时间被当作是一种最重要的资源,需要一定的调度算法来将其分配给各个任务.这样就可能引起控制任务的抖动,尤其是当周期很短、处理器利用率很高的时候.
Abstract An intelligent bus dispatching system can better meet people's travel needs.The optimized algorithm takes advantage of advanced technology and equipments.However,in recent years the development of Chinese intelligent bus dispatching systems is not satisfactory with an.excessive attention to advanced technology but less to practicality.Dynamic scheduling has yet to be fully exploited.In this paper,intelligent transportation scheduling systems and scheduling characteristics are analyzed. The information about dynamic transportation and vehicle locations is acquired and merged.An optimization model for intelligent dispatching of buses is proposed on basis of real data.This model is under the support of GPS positioning,communications,computers and other technologies,where intelligent algorithms are used in bus operation and dispatching and both passengers satisfaction and company profit are considered.The method of collecting data automatically and the algorithm of this model are presented.This model is shown to be able to significantly improve the rate of bus full loading,shorten the waiting time of passengers,and reduce the total vehicle trips,with an evident effect of optimized dispatching. Keywords intelligent transportation;optional model;dynamic dispatching;intelligent bus;Matlab software 0引言 伴随经济社会的发展,中国城市交通问题日益突出。交 通问题的出现,严重影响了城市的生产生活,而且从长远来看,影响了城市功能的发挥,制约了城市的健康发展。国际上城市交通发展的经验证明,解决城市交通问题,关键是要树立城市公共交通在城市交通体系中的主导地位,大力优先发展公共交通,建立先进的公共交通系统APTS (Advanced Public Traffic System )[1],实现公交调度智能化,提高道路通行 能力和公交运营管理水平。 近年来,由于科学技术的进步和政府对公交投入力度的加大,中国智能公共交通调度系统初现端倪,已经有杭州、上海、北京等地安装了电子站牌,车载GPS 定位设备,实现了车辆的实时跟踪、定位,公交车与调度室的双向通讯,以及电子站牌上实时显示下班车位置信息等功能。青岛、贵阳、石家庄等城市在实现公交系统智能化管理方面,已经有了一系列有益的探索[2]。但是,这些系统普遍存在先进的系统与静态、原始的调度方法共存现象,未能充分利用智能系统提供的动态 智能公交动态调度优化模型 摘要 利用先进的技术和设备实现公交的优化调度,充分满足人们的出行需要,是智能公交系统发展的目标。然而近年来中国智 能公交发展在一定程度上出现过于追求先进性、忽略实用性、运营效果不理想、动态调度尚待充分开发等问题。结合中国智能公交系统现状,通过对智能公交调度系统和调度特点深入分析,在GPS 定位、通信、计算机等技术的支持下,将动态交通状态信息与车辆定位信息有效融合,将智能化算法引入到公交运营调度中,建立了基于实时动态数据,兼顾乘客满意度和企业效益的动态调度优化模型。并且阐述了模型数据的自动采集方法、模型Matlab 程式化的解法。结果表明,该模型可以显著提高公交车辆满载率、缩短乘客等车时间和减少车辆总班次,优化调度效果明显。 关键词智能交通;优化模型;动态调度;智能公交;Matlab 软件 中图分类号U494.22,TP29文献标识码A 文章编号1000-7857(2009)17-0069-04 李志强,周建立,张毅 河南科技大学车辆和动力工程学院,河南洛阳471003 An Optimization Model for Dynamic Intelligent Dispatching of Buses 收稿日期:2009-05-11 基金项目:河南教育厅自然科学基金项目(200510464028);河南科技大学科研基金项目(2004ZY030,2006ZY027)作者简介:李志强,经济师,研究方向为智能交通,电子信箱:liqiangsqjt@https://www.doczj.com/doc/624887343.html, LI Zhiqiang,ZHOU Jianli,ZHANG Yi Vehicle &Motive Power Engineering College,Henan University of Science and Technology,Luoyang 471003,Henan Province,China
模糊控制规则表生成程序 %偏差E的赋值表 E=[1.0 0.8 0.7 0.4 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.7 1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.3 0.7 1.0 0.7 0.2 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.6 1.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0 0.6 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.7 1.0 0.7 0.3 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.7 1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.4 0.7 0.8 1.0]; %偏差变换率EC的赋值表 Ec=[1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 1.0]; %输出U的赋值表 u=[1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 1.0 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 1.0 0.7 0.3 0.0 0.0
MATLAB工具箱介绍 软件Matlab由美国MathWorks, Inc.公司出品,它的前身是C1eveMoler教授(现为美国工程院院士,Mathworks公司首席科学家)为著名的数学软件包LINPACK和EISPACK所写的一个接口程序。经过近20年的发展,目前Matlab已经发展成一个系列产品,包括它的内核及多个可供选择的工具箱。Matlab的工具箱数目不断增加,功能不断改善,这里简要介绍其中的几个。MATLAB 的M文件、工具箱索引和网上资源,可以从https://www.doczj.com/doc/624887343.html,处查找。 (1)通讯工具箱 (Communication ToolboX) ★提供100多个函数及150多个SIMULINK模块,用于系统的仿真和分析 ★可由结构图直接生成可应用的C语言源代码 (2)控制系统工具箱 (Control System Too1box) ★连续系统设计和离散系统设计 ★状态空间和传递函数 ★模型转换 ★频域响应:Bode图、Nyquist图、Nichols图 ★时域响应:冲击响应、阶跃响应、斜波响应等 ★根轨迹、极点配置、LQG (3)金融工具箱 (Financial Loo1boX) ★成本、利润分析,市场灵敏度分析 ★业务量分析及优化 ★偏差分析 ★资金流量估算 ★财务报表
(4)频率域系统辨识工具箱 (Frequency Domain System Identification Toolbox) ★辨识具有未知延迟的连续和离散系统 ★计算幅值/相位、零点/极点的置信区间 ★设计周期激励信号、最小峰值、最优能量谱等 (5)模糊逻辑工具箱 (Fuzzy Logic Too1box) ★友好的交互设计界面 ★自适应神经—模糊学习、聚类以及Sugeno推理 ★支持SIMULINK动态仿真 ★可生成C语言源代码用于实时应用 (6)高阶谱分析工具箱 (Higher—Order Spectral Analysis Toolbox) ★高阶谱估计 ★信号中非线性特征的检测和刻划 ★延时估计 ★幅值和相位重构 ★阵列信号处理 ★谐波重构 (7)图像处理工具箱 (Image Processing Toolbox) ★二维滤波器设计和滤波 ★图像恢复增强 ★色彩、集合及形态操作
计划/动态调度和路由模型 重新计划物流活动以应对地震不可预测性和毁灭性的地震影响着执行政府对灾害易发地区提供实用的应对计划以及时减少地震带来的破坏和损失。物流管理是其中一个关键问题,应考虑一个适当的规划,特别是规划所需商品的运输在响应和疏散受伤的人。在本文中,我们提供了一个动态调度模型和路由汽车以应对地震。我们关注的是两个商品的运输和受伤的人送到医院。该模型是在任何时间收到更新的信息并相有能力的改变调整计划。速度是一个关键的和一个成功的地震响应因素,模型分层次对受伤的人直到抵达医院的总时间最小化,以及总时间满足大众商品需求。我们设计的实验进行了从提高地震响应效率拓展到提高地震响应质量。 地震是最普遍的自然灾害,强大的地震影响更是毁灭性的。尽管成千上万的网络化的地震仪电台安装在世界各地不断分析和强大的电脑数据生成的这些站,我们仍无法准确预测何时何地地震将罢工。这个随机和不可预测性地震地震实施政府制定全面计划响应来减轻损害和损失。精心策划的后勤支持业务贡献显著减少地震损失和赔偿和保持一场灾难后幸存者。 在灾难发生后立即,工作主要集中在寻找和营救幸存者。这需要后勤支持通过运送受伤人们从受灾地区医院或其他紧急医疗中心。这是皮毛,具有必要分派商品(如食物和帐篷)和设备受影响的地区。这些商品可以来自指定的仓库或直接从供应商。相当大的不确定性的情况下赖斯-规划设计、调度和运输商品来自各种地方的不同规划区域可能会导致相当大的复杂性。
进一步的并发症救灾规划相关的物流数据的事实可能会改变在响应(易建联和Ozdamar 2007;Ozdamar et al . 2004年)。例子是项目需求的变化,计划供应商的订货情况在医院(包括例如能力和服务利率)或运输基础设施(道路可能被阻塞由于余震)。反应组织因此遇到一个动态的情况下,数据可能会改变突然和意外。此外,规则和程序可能需要被改变。例如,要提供更多的道路容量从海岸,在飓风疏散部分在美国公路I-16可能完全西行方向操作。这两个往东的车道I-16可以转化为西行的车道时必需的(CEMA 2011)。这些变化可能对响应计划和有很大的影响因此可以根据这些变化是有益的调整计划。一个决策支持系统提供可能性轻易调整计划基于这样的新信息可以更好地促进物流活动的计划组织参与灾难的反应。 本文旨在建立一个数学模型,使中央的身体协调和(重新)计划物流活动同时考虑现有的计划和新网络中可用的数据变化情况和需求。政府经常设置这样的灾难灾难发生后协调中心。我们也考虑两个层次目标函数关注减少运输时间货物和受伤的人。第一个目标打算最小化总等待时间的伤员灾难响应到达的时刻医院在规划周期。第二个目标是最小化总等待规划周期期间从需要的那一刻起,直到货物到达在该地区的影响。 提出了混合整数,多目标,多种商品,综合模型包含条件和约束中遇到地震的现实响应。它包含了各种车辆和车辆的能力以及多样性联合运输的模式允许商品和受伤的人。此外,我们的模型能够在任意时刻处理更新计划动态条件下的响应。我们的模型可以选择另外的车了每次需要重新规划。此外,我们的模型的区别 之间流动的商品和受伤人员的流动。 此外,值得注意的是,该模型和算法实现物流决策支持系统(LDSS),可以使用
一、速度控制算法: 欧阳歌谷(2021.02.01) 首先定义速度偏差-50 km/h≤e(k)≤50km/h,-20≤ec(i)=e(k)-e(k-1)≤20,阀值eswith=10km/h 设计思想:油门控制采用增量式PID控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。 选择规则: e(k)<0 ①e(k)>-eswith and throttlr_1≠0 选择油门控制 ②否则:先将油门控制量置0,再选择刹车控制 0 E/EC和U取相同的隶属度函数即: 说明:边界选择钟形隶属度函数,中间选用三角形隶属度函数,图像略 实际EC和E输入值若超出论域范围,则取相应的端点值。 3.模糊控制规则 由隶属度函数可以得到语言值隶属度(通过图像直接可以看出)如下表: 表1:E/EC和U语言值隶属度向量表 设置模糊规则库如下表: 表2:模糊规则表 3.模糊推理 由模糊规则表3可以知道输入E与EC和输出U的模糊关系,这里我取两个例子做模糊推理如下: if (E is NB) and (EC is NM) then (U is PB) 那么他的模糊关系子矩阵为: 职业暴露后应遵循的处理原则 1、及时局部处理 2、报告与记录 3、及时风险评估 4、预防性治疗 5、提供咨询与定期随访监测 6、资料整理上报与总结 锐器伤后处理流程图 医务人员被患血源性传播疾病患者使用过的锐器 预防用药 定期追踪 一、局部处理 清洗:及时挤压伤口周围刺激出血,在流动水下清洗伤口5分钟;皮肤粘膜的暴露以流动水或生理盐水冲洗。(眼睛受到血液喷溅,用生理盐水冲)。 消毒:用消毒液,进行伤口消毒(75%酒精、0.5% 碘酊)。 二、报告与记录 发生职业暴露 填写职业暴 露登记表 报告记录内容 1、暴露人个人资料 2、时间、地点、经过 3、暴露方式与经过 4、部位、伤口类型(深浅、大小、有无出血) 5、污染物名称(血、体液、培养液等) 6、损伤器具类型 7、患者病种(乙肝、丙肝、HIV)和含有病毒的情况、是否正接受治疗,何种药物治疗8、处理方法及处理经过,是否实施预防性用药、首次用药时间、药物毒副作用及用药的依从性情况; 三、HIV职业暴露后的风险评估 医务人员艾滋病病毒职业暴露防护 工作指导原则(试行) 医务人员发生HIV职业暴露后,风险评估的步骤: 1、暴露程度分级:根据暴露类型、损伤程度、暴露量、暴露时间、部位等分三级; 2、暴露源分级:病毒载量水平分为轻度、 重度和暴露源不明三种类型。 3、确定是否实施预防性用药方案。 四、血源性职业暴露后预防性治疗暴露后如需预防性治疗愈早愈好 2、暴露于HCV ※ 目前尚无统一预防用药标准。 ※ 有专家建议:可酌情应用干扰素+利巴韦林联合治疗。 3、暴露于梅毒 可预防性注射长效青霉素240万U/次,每周1次,连续2~3周。暴露后三个月追踪TP 梅毒初筛试验(UCR ) [快速血浆反应素试验(RPR )] 梅毒确诊试验(TPPA ) 医务人员 湖南工业大学 课程设计 资料袋 学院(系、部)2011~2012 学年第 2 学期 课程名称图论及其应用指导教师职称 学生姓名ake555 专业班级学号 题目交巡警服务平台的设置与调度的优化模型 成绩起止日期2013 年6月16 日~2013 年 6 月21 日 目录清单 课程设计任务书 2012—2013学年第2学期 学院专业班级 课程名称:图论及其应用 设计题目:交警服务平台和调度设计问题 完成期限:自2013 年 6 月16 日至2013 年 6 月21 日共 1 周 指导教师(签字):年月日系(教研室)主任(签字):年月日 图论及其应用课程设计说明书 2013年6 月21 日 目录 一、问题描述 (5) 二、模型假设 (6) 三、符号说明 (6) 四、模型建立与求解 (6) 五、模型评价 (15) 六、体会心得 (16) 七、参考文献 (16) 八、附件 (16) 交巡警服务平台的设置与调度的优化模型 一问题描述 随着人们社会经济的迅猛发展,人们生活的质量的提高,安全意识以深入人心,作为社会秩序的维护者警察对社会稳定起着巨大的作用 .警察肩负着刑事执法、治安管理、交通管理、服务群众四大职能。为了更有效地贯彻实施这些职能,需要在市区的一些交通要道和重要部位设置交巡警服务平台。每个交巡警服务平台的职能和警力配备基本相同。由于警务资源是有限的,如何根据城市的实际情况与需求合理地设置交巡警服务平台、分配各平台的管辖范围、调度警务资源是警务部门面临的一个实际课题。 试就某市设置交巡警服务平台的相关情况,建立数学模型分析研究下面的问题:问题一:附件1中的附图1给出了该市中心城区A的交通网络和现有的20个交巡警服务平台的设置情况示意图,相关的数据信息见附件2。要求为各交巡警服务平台分配管辖范围,使其在所管辖的范围内出现突发事件时,尽量能在3分钟内有交巡警(警车的时速为60km/h)到达事发地。 问题二:对于重大突发事件,需要调度全区20个交巡警服务平台的警力资源,对进出该区的13条交通要道实现快速全封锁。实际中一个平台的警力最多封锁一个路口,通过求解给出该区交巡警服务平台警力合理的调度方案。 问题三:根据现有交巡警服务平台的工作量不均衡和有些地方出警时间过长的实际情况,拟在该区内再增加2至5个平台,通过分析计算需要增加平台的具体个数和位置。 问题四:针对全市(主城六区A,B,C,D,E,F)的具体情况,按照设置交巡警服务平台的原则和任务,分析研究该市现有交巡警服务平台设置方案(参见附件)的合理性。如果有明显不合理的地方,给出解决方案。 问题五:如果该市地点P(第32个节点)处发生了重大刑事案件,在案发3分钟后接到报警,犯罪嫌疑人已驾车逃跑。为了快速搜捕嫌疑犯,请给出调度全市交巡警服务平台警力资源的最佳围堵方案。 二模型假设 1.出警时道路恒畅通(无交通事故、交通堵塞等发生),警车行驶正常;2.在整个路途中,转弯处不需要花费时间; 3.假设逃犯驾车逃跑的车速与警车车速相当 三符号说明 31.“高速铁路运行控制与动态调度一体化基础理论与关键技术”重大项 目指南 作为我国综合交通运输体系的核心,高速铁路近年来发展迅速,其运营里程数、客运量等均居世界首位。然而,随着我国高速铁路里程数和客运量的快速增加,现有的控制手段和调度方法在快速、有效解决高速列车运行过程中出现的突发事件(比如电力故障、突发地震、山体滑坡、轨道突然出现障碍物等)方面尚有一定差距,使得高速列车晚点时间过长,旅客满意度下降、高铁运营效率不高。为此,本重大项目主要针对高速列车运行过程中可能出现的各类突发事件,开展高效运行控制和动态调度一体化基础理论与关键技术研究,提升高铁应急决策能力,最终实现提高旅客满意度和高铁运营效率。 一、科学目标 面向我国高速铁路未来发展的重大需求(列车运行安全、旅客满意度和运营效率),针对目前我国高速铁路应急处置突发事件(比如突发地震、山体滑坡、轨道突然出现障碍物等)能力不高的现状,本项目围绕高速铁路高效运行控制理论与动态调度方法展开研究,旨在实现以下三个方面的理论突破:高速移动环境下多层域实时智能感知理论与方法;多约束条件下组合动态优化控制方法;复杂高铁路网下列车群的协同动态调度理论。 主要理论成果在该领域国际著名刊物上发表并产生重要影响,技术成果申请系列发明专利。构建高速铁路运行控制与动态调度一体化仿真实验系统,完成室内仿真实验,部分相关理论、方法和技术成果在实际系统中进行验证。培养一批我国高速铁路运行控制与调度方面的理论和工程技术人才,为我国高速铁路事业做出贡献。 二、研究内容 (一)高速移动环境下多层域协同智能感知与数据融合。 研究满足高速铁路系统全局状态(包括山体滑坡、铁轨突然出现障碍物等高速铁路灾害状态)信息重构的传感器部署方法,揭示系统不同层级状态信息的关联规律及耦合机理,提出跨层域多传感器协同感知理论,研究轻量级高效的多源数据融合理论,建立兼顾大数据和样本数据的数据组织结构和分析方法,为建立高速铁路运行控制与调度一体化模型提供数据支撑。 (二)复杂环境下高速铁路运行控制与动态调度一体化建模。 研究突发事件条件下高速铁路调度系统状态演化机理,分析列车延误传播机理和影响;提取成网条件下高速铁路调度复杂巨系统特征参数,分析参数与系统状态的映射关系;研究状态交互影响的时空特性,耦合规律,构建其全局架构模型;针对复杂路网条件下不同的时空粒度需求,研究网络客流的实时分布及运力资源匹配模型,研究车、线、网构成的高速铁路运行控制与调度一体化模型。为研究高速铁路运行过程突发事件情况下的控制与动态调度奠定基础。 (三)复杂环境下高速列车运行优化控制方法。 基于运行数据和实时动态感知信息及一体化模型,分析复杂快速多变且信息交互的高速铁路运行环境,研究正常状态及突发事件情况下事件驱动的列车运行实时动态优化控制理论以及人机高效协同决策机制,提出列车运行调整动态优化的评价体系,建立有效的动态调整的满意决策控制模型。 (四)复杂高速铁路路网条件下的列车群动态调度方法。 5.2.2.6 模糊控制器设计实例 1、单输入模糊控制器的设计 【例5.12】已知某汽温控制系统结构如图5.10所示,采用喷水减温进行控制。设计单输入模糊控制器,观察定值扰动和内部扰动的控制效果。 R = 图5.10 单回路模糊控制系统 按表5-2确定模糊变量E 、U 的隶属函数,按表5-3确定模糊控制规则,选择温度偏差e 、控制量u 的实际论域:[ 1.5,1.5]e u =∈-,则可得到该系统的单输入模糊控制的仿真程序如FC_SI_main.m 所示,仿真结果如图5.11所示。 设温度偏差e 、控制量u 的实际论域:[ 1.5,1.5]e u =∈-,选择e 、u 的等级量论域为 {3,2,1,0,1,2,3}E U ==---+++ 量化因子2) 5.1(5.13 2=--?= K 。 选择模糊词集为{NB,NS,ZO,PS,PB },根据人的控制经验,确定等级量E ,U 的隶属函数曲线如图5-8 所示。根据隶属函数曲线可以得到模糊变量E 、U 的赋值表如表5-3所示。 图5-8 E ,U 的隶属函数曲线 -3 -2 -1 1 2 3 依据人手动控制的一般经验,可以总结出一些控制规则,例如: 若误差E 为O ,说明温度接近希望值,喷水阀保持不动; 若误差E 为正,说明温度低于希望值,应该减少喷水; 若误差E 为负,说明温度高于希望值,应该增加喷水。 若采用数学符号描述,可总结如下模糊控制规则: 若E 负大,则U 正大; 若E 负小,则U 正小; 若E 为零,则U 为零; 若E 正小,则U 负小; 若E 正大,则U 负大。 写成模糊推理句: if E=NB then U=PB if E=NS then U=PS if E=ZO then U=ZO if E=PS then U=NS if E=PB then U=NB 由上述的控制规则可得到模糊控制规则表,如表5-4所示。 表5-4 模糊控制规则表 模糊控制规则实际上是一组多重条件语句,它可以表示从误差论域E 到控制量论域U 的模糊关系R 。 按着上述控制规则,可以得到该温度偏差与喷水阀门开度之间的模糊关系R : ()()()()() E U E U E U E U E U R E U NB PB NS PS ZO ZO PS NS PB NB - - =?=?????U U U U 计算模糊关系矩阵R 的子程序如F_Relation_1.m 所示。 %模糊关系计算子程序F_Relation_1.c function [R,mfe,mfu,ne,nu,Me]=F_Relation_1 %#############################输入模糊变量赋值表(表5-3)############################ ne=7;%等级量e 的个数 nu=7;%等级量u 的个数 Me=[0 0 0 0 0 0.5 1;0 0 0 0 1 0.5 0;0 0 0.5 1 0.5 0 0; 0 0.5 1 0 0 0 0;1 0.5 0 0 0 0 0]; Mu=Me; %##定义模糊变量及其语言值 1=PB,2=PS,3=O,4=NS,5=NB ,并输入模糊控制规则表(表5-4)## mfc=5;%模糊变量E 的语言值个数,控制规则表列数 M A T L A B模型预测控制工具箱函数 8.2系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2模型建立与转换函数 8.2.1模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型; ⑤MPC传递函数模型。 在上述5种模型格式中,前两种模型格式是MATLAB通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC状态空间模型和MPC传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC状态空间模型之间的转换 MPC状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动 和采样周期的描述信息,函数ss2mod()和mod2ss()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC状态空间模型函数ss2mod() 该函数的调用格式为 pmod=ss2mod(A,B,C,D) pmod=ss2mod(A,B,C,D,minfo) pmod=ss2mod(A,B,C,D,minfo,x0,u0,y0,f0) 式中,A,B,C,D为通用状态空间矩阵; minfo为构成MPC状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆minfo(1)=dt,系统采样周期,默认值为1; ◆minfo(2)=n,系统阶次,默认值为系统矩阵A的阶次; ◆minfo(3)=nu,受控输入的个数,默认值为系统输入的维数; ◆minfo(4)=nd,测量扰的数目,默认值为0; ◆minfo(5)=nw,未测量扰动的数目,默认值为0; ◆minfo(6)=nym,测量输出的数目,默认值系统输出的维数; ◆minfo(7)=nyu,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o,则取默认值。 x0,u0,y0,f0为线性化条件,默认值均为0; pmod为系统的MPC状态空间模型格式。 例8-5将如下以传递函数表示的系统模型转换为MPC状态空间模型。 解:MATLAB命令如下: 龙源期刊网 https://www.doczj.com/doc/624887343.html, RGV的动态调度模型及其相关分析 作者:吴彦亭张子岩毛敏 来源:《信息技术时代·下旬刊》2018年第01期 摘要:多功能轨道式自动引导车极大地加速了產业自动化的历程,因而对于 RGV动态调度问题的研究和分析一直是业内的焦点话题。本文通过建立相关模型,对动态调度问题加以研究。 关键词:非线性目标规划;粒子群-禁忌搜索算法;鲁棒性分析 一、模型一的建立与求解:非线性目标规划模型 首先遵循顺序排队原则确立了调度方案的起始点,紧接着通过建立基于就近算法的流程模型明确其最优化调度流程步骤。继而建立了循环叠加模型,最后建立基于顺排原则和就近算法的非线性目标规划模型。关于n个物料,m台CNC()的作业车间调度问题时,具体步骤 为: (1)量化表示工作用时 (1) (2)假定统一工作流程之中,不同的需求发出点的开始加工的优先级用表示,定义其优先选择的原则为:若,则第k台CNC比第h台CNC优先实施物料加工;若,则第k台CNC 比第h台CNC实施物料加工的优先级相同;若,则则第h台CNC比第k台CNC优先实施物料加工。则通过设置优先级的约束条件,以期达到缩短重复运行距离,提高运行效率的目的。所设约束条件如下: (2) 其中,M为一个趋于无穷大的常系数。 (3)在求解优化调度模型中,通常构建目标函数[3]来确定工作情况和时间的关系。该模型中,在工作总用时既定的情况下求解最大有效工作量(由最长有效工作时间T来表示)来衡量工作效率。最终得到的目标函数为: 二、模型二的建立与求解:粒子群-禁忌搜索算法 首先,对上一种情况的非线性规划模型进行适用性的修改,建立了空间调度的规划模型。接下来,运用MATLAB软件,通过粒子群算法对数学模型进行初步的处理,发现其寻优不够 由于项目需要,需要模糊控制算法,之前此类知识为0,经过半个多月的研究,终于有的小进展。开始想从强大的互联网上搜点c代码来研究下,结果搜遍所有搜索引擎都搜不到,以下本人从修改的模糊控制代码,经过自己修改后可在,运行!输入e表示输出误差,ec表示误差变化率,经过测试具有很好的控制效果,对于非线性系统和数学模型难以建立的系统来说有更好的控制效果!现将其公开供大家学习研究! #include <> #include"" #define PMAX 100 #define PMIN -100 #define DMAX 100 #define DMIN -100 #define FMAX 100 /*语言值的满幅值*/ int PFF[4]={0,12,24,48}; /*输入量D语言值特征点*/ int DFF[4]={0,16,32,64}; /*输出量U语言值特征点*/ int UFF[7]={0,15,30,45,60,75,90}; /*采用了调整因子的规则表,大误差时偏重误差,小误差时偏重误差变化*/ /*a0=,a1=,a2=,a3= */ int rule[7][7]={ //误差变化率 -3,-2,-1, 0, 1, 2, 3 // 误差 {-6,-6,-6,-5,-5,-5,-4,}, // -3 {-5,-4,-4,-3,-2,-2,-1,}, // -2 {-4,-3,-2,-1, 0, 1, 2,}, // -1 {-4,-3,-1, 0, 1, 3, 4,}, // 0 {-2,-1, 0, 1, 2, 3, 4,}, // 1 { 1, 2, 2, 3, 4, 4, 5,}, // 2 { 4, 5, 5, 5, 6, 6, 6}}; // 3 /**********************************************************/ int Fuzzy(int P,int D) /*模糊运算引擎*/ { int U; /*偏差,偏差微分以及输出值的精确量*/ unsigned int PF[2],DF[2],UF[4]; /*偏差,偏差微分以及输出值的隶属度*/ int Pn,Dn,Un[4]; long temp1,temp2; /*隶属度的确定*/ /*根据PD的指定语言值获得有效隶属度*/职业暴露后应遵循的处理原则
交巡警服务平台的设置与调度的优化模型
31高速铁路运行控制与动态调度一体化基础理论与关键技术
模糊控制程序实例学习资料
MA AB模型预测控制工具箱函数
RGV的动态调度模型及其相关分析
模糊控制算法c程序
相关主题
文本预览