
《基于UG的运动仿真及高级仿真》
项目一:机构运动仿真
项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化。
任务一:熟悉掌握运动仿真基础知识
运动分析模块(Scenario for motion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律。通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)。设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中。
一、运动方案创建步骤
1.创建连杆(Links);
2.创建两个连杆间的运动副(Joints)
3.定义运动驱动(Motion Driver)
◆无运动驱动(none):构件只受重力作用
◆运动函数:用数学函数定义运动方式
◆恒定驱动:恒定的速度和加速度
◆简谐运动驱动:振幅、频率和相位角
◆关节运动驱动:步长和步数
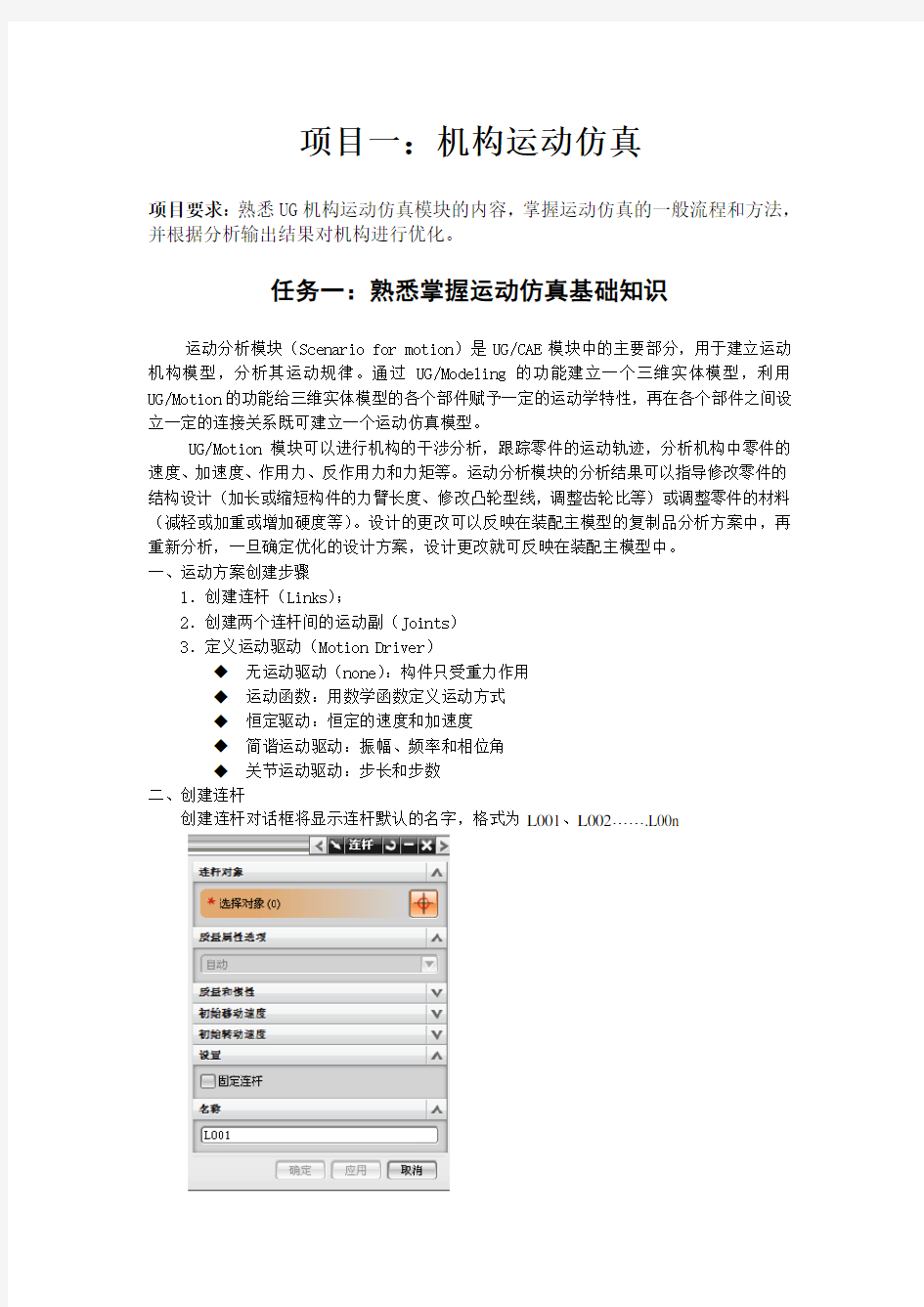
二、创建连杆
创建连杆对话框将显示连杆默认的名字,格式为L001、L002 (00)
质量属性选项:
质量特性可以用来计算结构中的反作用力。当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析。根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果。但在某些特殊情况下,用户必须人工输入这些质量特性。
固定连杆:
人工输入质量属性,需要指定质量、惯性矩、初始移动速度和初始转动速度。注:必须选择好质心并且输入质量的数值,才能定义质量属性。
三、创建运动副
运动副就是将机构中的连杆连接在一起,从而使连杆一起运动。在运动副创建前,机构中的连杆是在空间浮动的,没有任何约束,具有6个自由度。运动副创建后,会约束一个或几个自由度,运动副具有双重作用:允许所需的运动和限制不要的运动。
运动副的创建步骤:
1)创建运动副要约束的第一个连杆
2)创建运动副第一个连杆的原点和方向
3)创建运动副要约束的第二个连杆
4)创建运动副第二个连杆的原点和方向
连杆选择技术:
UG运动分析模块用首选选中的对象判断要创建运动副的原点和方向。
如果选中的对象是圆弧或圆,则运动副的原点设在圆弧或圆的圆心,运动副的Z轴垂直于圆的平面。
如果首先选中的对象是直线,则运动副的原点设定在直线最近的控制点上,且运动副的Z轴方向平行于直线。
如果选中的对象不能够确定运动副的原点和方向,则需手工定义运动副的原点和方向。
运动副方向决定其自由运动的方向。转动副(旋转副和柱面副)按右手螺旋法则绕运动副的坐标系的Z轴运动。线性运动副(滑动副)沿Z轴移动。
咬合连杆:设计位置和装配位置不一致。
运动驱动:用来定义运动副上的运动驱动。
常见运动副类型如下:
1.旋转副
它有两种形式:一种是两个连杆绕同一轴作相对的转动,另一种是一个连杆绕固定在机架上的一根轴进行旋转
⑥旋转副有一个绕Z轴转动的自由度,旋转副不允许两个连杆之间有任何移动。
⑥旋转副可以定义一个运动输入,旋转的正向由右手法则确定。
⑥一个旋转副去掉5个自由度。
⑥相连的两杆不在装配位置(装配位置和设计位置不一致),选择复选框Snap Links
(咬合连杆)
⑥可以规定旋转副的运动极限:
2.滑动副
可以实现一个部件相对与另一部件的直线运动,它有两种形式:一种是滑块为一个自由滑块,在另一部件上产生相对滑动;一种为滑块连接在机架上,在静止表面上滑动
④滑动副连接两个连杆,有一个自由度,连杆之间不允许有转动。
④滑动副可以定义一个运动驱动,移动的正方向是正Z轴方向。
④一个滑动副去掉5个自由度。
④一般来说,滑动副的原点可以位于Z轴的任何位置,滑动副都会产生相同的运动。
④较好的方法是将运动副的原点放在滑动副模型的中间。
④可以规定滑动副的运动极限
3.柱面副
实现了一个部件绕另一个部件(或机架)的相对转动。柱铰连接也有两种形式:一种是两个部件相连,另一种是一个部件连接在机架上。
④柱面副连接两个连杆,有2个自由度,1个移动自由度和1个转动自由度。
④不可以定义运动驱动
④一个柱面副可以由一个旋转副和一个滑动副替代。
④一个柱面去掉4个自由度。
4.万向节
万向接头实现了两个部件之间可以绕互相垂直的两根轴作相对的转动,它只有一种形式必需是两个连杆相连。
④万向节可以连接2个成一定角度转动连杆,万向节有2个转动自由度。
④万向节不能加驱动,不可规定万向节的运动极限。
④万向节的原点必须位于ZY的交点,要避免产生折叠(小于90度的)万向节,或在
期望的运动范围内会折叠的万向节。
④如果连杆的装配位置与设计位置不一致,则不能采用此运动副。
④确定X1轴的方向是确定万向节方向最简单的方法。用这种方法为系统设定万向节
的旋转纵轴,可不必关心Y轴和Z轴的初始方向,因为Y轴和Z轴在旋转方向上可自由移动,故明确确定Y轴和Z轴的初始方向是不可能的。
④第一个连杆的Z轴方向控制第二个连杆的Z轴方向,它们会相互成90度。
5.球面副
实现了一个部件绕另一个部件(或机架)作相对的各个自由度的运动,它只有一种形式必需是两个连杆相连。
④球面副连接两个连杆,有三个旋转自由度
④球面副不能加驱动,不能规定其运动极限。
④球面副的原点位于球和铰套的公共中心点。球面副没有方向,当创建球面副时,只
需指定连杆和球面副的原点。
6.平面副
平面连接可以实现两个部件之间以平面相接触,互相约束
④平面副连接两个连杆,有3个自由度---2个移动自由度和1个转动自由度。两个连
杆在相互接触的平面上自由滑动,并可绕平面内的法线自由转动。
④平面副不能定义运动驱动
④一个平面副去掉3个自由度
7.螺旋副
④螺旋副本身不能对两个连杆进行约束。柱面副代表螺纹的一对螺栓和螺母,当柱面
副和螺旋副结合后,柱面副提供约束,将连杆定位于圆柱/螺旋副的轴线上。
④螺旋副提供螺纹,因此螺旋副和柱面副结合起来即可模拟螺母在螺杆上的运动。
④不能给螺旋副添加驱动或极限。
8.线缆副
④线缆副定义滑动副之间的相互关系。当一个滑动副移动时,相应的另一个滑动副也
跟着移动,其运动关系可以是1:1的等速,同方向的运动关系,也可以定义其他的运动关系------一个快、一个慢及两个滑动副运动方向相反。
④该运动副可以用来模拟电缆、滑轮等。
④线缆副不能定义驱动,但可以对其中的一个滑动副加驱动。
④不能定义线缆副的运动范围。
比率:第一个滑动副和第二个滑动副的运动速度之比。
比率为正,第二个滑动副的运动方向和第一个滑动副的运动方向相同,反之相反。
比率小于1,则第二个滑动副的运动速度大于第一个滑动副的运动速度。
线缆副去掉2个自由度。
9.齿轮齿条副
④齿轮齿条副模拟齿轮和齿条之间的啮合运动,选择现有的旋转副和现有的滑动副,
即可创建齿轮齿条副并定义传动比。
④不能定义齿轮齿条副的驱动和极限,但可以给滑动副和螺旋副定义驱动。
④Z轴平行于齿条的滑动方向,原点是齿轮齿条牙齿的接触点。
④滑动副和移动副须预先创建
比率参数等效于齿轮的节圆半径,单位为部件文件的单位,它定义了第二个连杆相对于第一个连杆沿运动副Z轴方向的移动比率。
10.齿轮副
齿轮副模拟一对齿轮,选择连个现有的螺旋副即可创建齿轮副,并定义齿轮的传动比。
不能定义齿轮副的驱动和极限,但可以给螺旋副定义驱动
齿轮的啮合点即为齿轮副的原点。
比率参数即为齿轮传动比,无量纲。
旋转轴可以不平行,既可以创建锥齿轮。
四、创建力
作用力使物体产生运动,作用力具有大小和方向,根据其方向的不同性质,在仿真模块中分为标量力和矢量力。
标量力是具有一定大小,方向随运动连杆不断变化的力。
矢量力是具有一定的大小,其方向保持不变的力。
五、创建弹簧和阻尼
弹簧是一个弹性元件,可给物体施加力,施加力的大小由胡克定律确定:
F
kX
F为弹簧力,k为弹簧刚度,x为弹簧产生的位移。
弹簧创建步骤为:
④选择弹簧的第一个连杆
④选择弹簧的初始点
④选择弹簧的第二个连杆或单击“确定”按钮,弹簧固定到地
④选择弹簧的终点
④输入弹簧的刚度,默认值是1
④输入弹簧的自由长度,默认值是0
阻尼对物体的运动起反作用,消耗能量,逐渐降低运动响应,常和弹簧一起使用,控制弹簧的反作用力,使弹簧的运动比较缓和。
阻尼力是物体运动速度的函数,其作用方向与物体的运动方向相反,表示为: cV F =
其中F 为阻尼力,c 为阻尼系数,V 为物体运动速度
阻尼创建过程为: ④ 选择阻尼的第一个连杆 ④ 选择第一个连杆的阻尼附着点
④ 选择阻尼的第二个连杆,或单击“确定”按钮,阻尼附着到地。 ④ 选择第二个连杆的阻尼附着点 ④ 输入阻尼系数,默认值是1 六、3D 接触与碰撞
3D 接触可以用来建立实体之间的碰撞模型,当两个实体建立接触关系后,系统在每一步分析中检查两者之间的距离关系,一旦判断出有接触发生,求解器就计算出接触力和接触运动响应。接触力计算公式为: e
kx F =
其中,F 为接触力,k 为刚度,x 为穿透深度,e 为力指数。
七、图表与电子表格
运动仿真模块提供图表与Excel 电子表格功能,运动仿真结果可以在UG 环境下绘制曲线图形或进行表格形式的显示。
图表功能生成电子表格数据库并绘出下列仿真结果:位移、速度、加速度和力。图标功能是从运动分析中提取这些信息的唯一方法。
请求:位移、速度、加速度、力、电动机驱动
组件:
幅值(总值):只考虑线性运动。该选项给出一个合值或总值而不考虑沿各个特定方向的分量。以位移为例,该选项会给出从A点到B点的最小距离,而不考虑沿X、Y、Z轴方向的分量。
X、Y、Z:分别绘出沿X、Y、Z轴的线型运动值。这些选项允许将每个轴隔离开来单独研究。
角度幅值:只考虑旋转运动,给出一个总值或合值,而不考虑绕各个轴的角度分量。
欧拉角:用来描述刚体的定点转动,用动坐标系相对于固定坐标系的三个角度来表达,动坐标系固连于刚体,并且随刚体一起绕定点转动,开始时两坐标系重合。
欧拉角度1:动坐标系绕固定坐标系Z轴转动的角度。
欧拉角度2:动坐标系转到新位置后,绕其X1轴转动的角度。
欧拉角度3:动坐标系转到新位置后,绕其Z1轴转动的角度。
相对和绝对
绝对:图标显示的数值是按绝对坐标系测量获得的。
相对:图标显示的数值是按所选的运动副或标记的坐标系测量获得的,当所选的运动副或标记的方向与绝对坐标系不一致时,就应选用相对参考坐标系。
运动函数:显示结构中运动副所定义的运动驱动函数。
Y轴定义:选择了“运动对象”设置了“请求”和“组件”后,就可以将该曲线绘制出来。Y轴将显示这些曲线各自的值。
X轴定义:以时间作为X轴,默认值。也可以由用户自定义。
任务二:滑块联轴器工作模拟
滑块联轴器是一种可移动式联轴器,又称补偿式刚性联轴器,其结构特点是能够连接中心线不重合的两根轴,并使中心线不重合的两根轴具有同向且相等的角速度。本任务进行滑块联轴器的造型与仿真过程,并通过给半联轴器与滑块之间添加碰撞和滑动副两种形式,验证从动副经过滑块联轴器的速度传递可以得到和主动轴同向且相等的角速度。滑块连轴器如下图所示。
一、零件造型
1. 机架
绘制机架草图,如下图所示,然后拉伸,厚度为20mm
在拉伸体端面添加如下草图,然后拉伸,拉伸参数如下:
在拉伸体上表面绘制如下草图,拉伸切除,深度为10mm
最后结果如下:
2. 活动机架
活动机架草图如下,然后拉伸,厚度为20mm
3. 半联轴器
半联轴器尺寸如下,拉伸,厚度为40mm
在其端面插入草图,尺寸如下,然后作切除拉伸,深度为20mm
在拉伸体的另一端,然后拉伸,厚度为25mm
继续添加草图,然后拉伸,厚度为35mm
最后结果如下图所示:
4. 滑块
滑块尺寸如下图所示,然后拉伸,厚度为20mm
在其端面插入草图,尺寸如下,然后作切除拉伸,深度为20mm
再在此端面插入草图,尺寸如下图所示:
然后拉伸,参数如下:
最终得到滑块的造型,如下图所示:
二、构建装配模型
三、运动仿真
1.进行三维碰撞接触状态模拟,给出半联轴器2的转速曲线。2.生成gif动画
任务三:离心调速器工作模拟
机械运转过程中,当工作阻力或驱动力发生突变时,会使输入能量与输出能量在较长的一段时间内失去平衡,产生非周期性的速度波动,若不加以调节,会使系统的转速持续上升或下降,严重时将导致飞车或停止转动。为避免这种情况,必须对速度进行调节。
离心调速器工作原理如上图所示:立轴与系统相连,当系统的转速过高时,立轴带动调速器的分球转动,离心力使飞球张开,带动轴环旋转并向上移动,轴环带动轴套向上移动,节流阀向下,使管道开启度减小,使进入原动机的工作介质减少,立轴转速下降。反之,当转速过低时,节流阀开启增大,进入原动机的工作介质增多,使系统的转速增加,从而调节系统的转速。
一、零件造型
1.横杆、连杆、臂杆
横杆尺寸如下:
退出草图,拉伸厚度为5mm,结果如下:
臂杆尺寸如下:
拉伸长度为5mm,结果为:
连杆1、连杆2、连杆3的尺寸分别如下,拉伸厚度均为5mm
连杆4尺寸同连杆2,如下:
2、飞球
创建飞球,直径为50,圆心选择工件坐标系原点。选择【格式】/【WCS】/【原点】,在弹出的对话框中输入数值,改变工件坐标系原点位置。
创建一长方体,输入数值,布尔操作选择求和
在长方体上作切除拉伸,拉伸深度为10,草图及结果如下:
3、立轴
首先得到圆柱体,直径为30mm,高度为250mm
在圆柱体端面绘制草图如下,然后作切除拉伸,给定深度为15mm,结果如下:
4. 轴环与轴套
首先得到一圆柱体,直径为40mm,高度为30mm,然后构造另一圆柱体,直径为20mm,高度为30mm,做布尔差运算。在圆柱体轴心线的平面插入草图,尺寸如下