伺服马达原理与控制,
模拟舵机和数字舵机的区别,
以及常见问题解决
伺服马达原理与控制
1、伺服马达内部结构
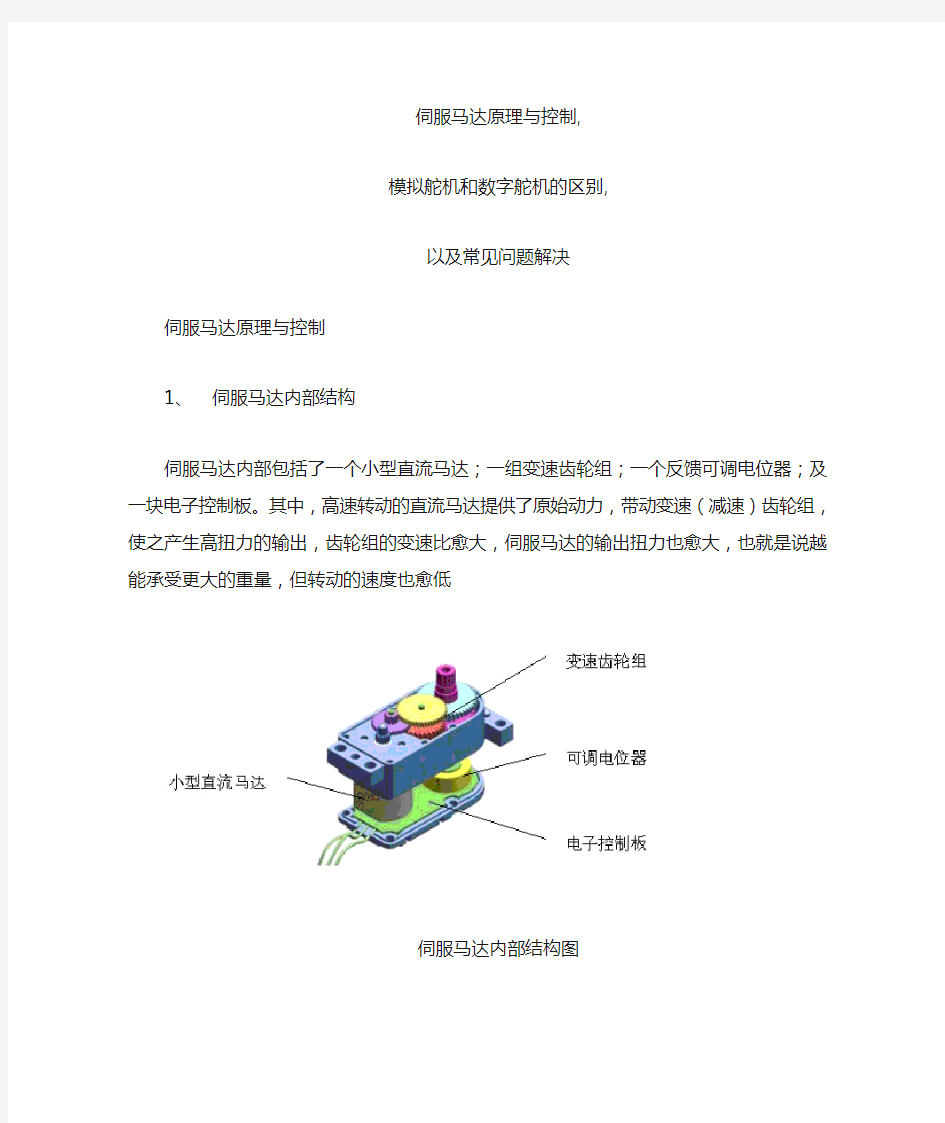
伺服马达内部包括了一个小型直流马达;一组变速齿轮组;一个反馈可调电位器;及一块电子控制板。其中,高速转动的直流马达提供了原始动力,带动变速(减速)齿轮组,使之产生高扭力的输出,齿轮组的变速比愈大,伺服马达的输出扭力也愈大,也就是说越能承受更大的重量,但转动的速度也愈低
伺服马达内部结构图
2、伺服马达的工作原理
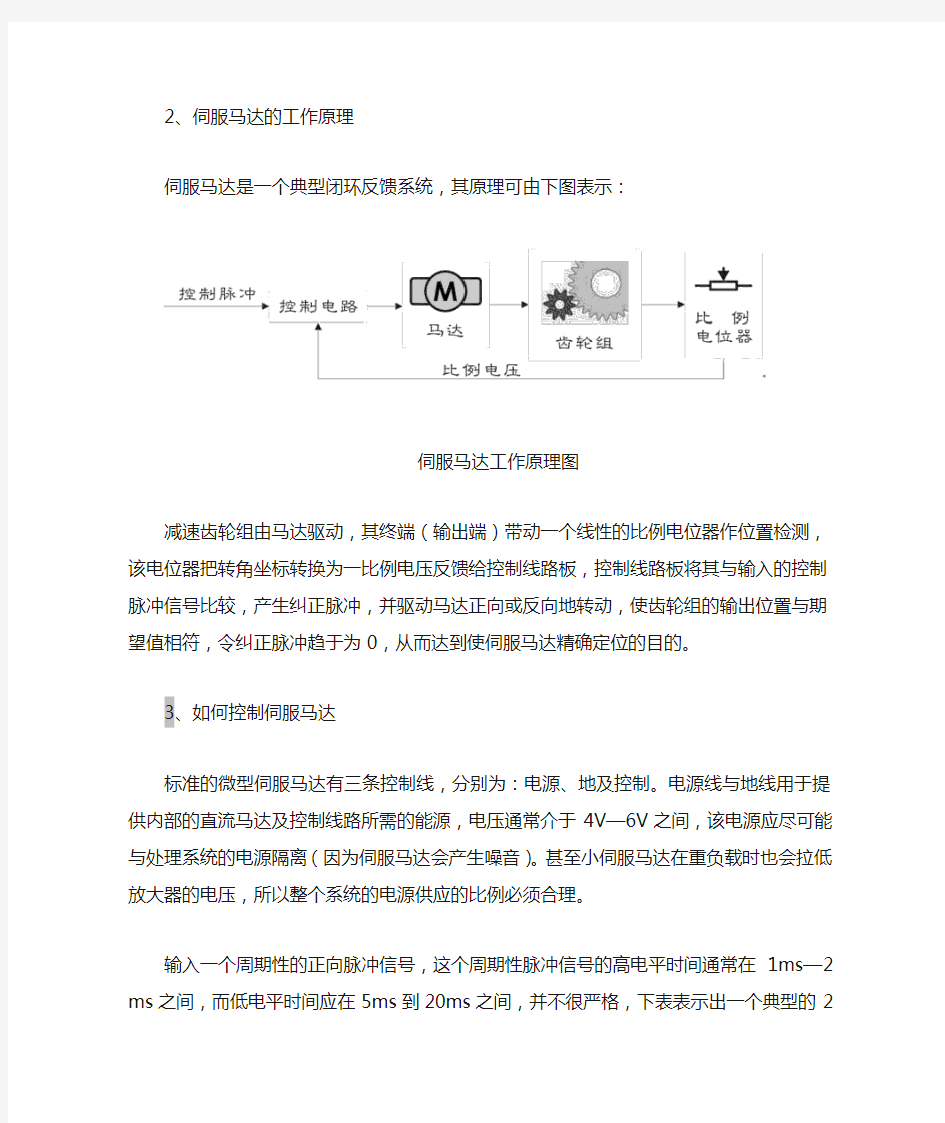
伺服马达是一个典型闭环反馈系统,其原理可由下图表示:
伺服马达工作原理图
减速齿轮组由马达驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动马达正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服马达精确定位的目的。
3、如何控制伺服马达
标准的微型伺服马达有三条控制线,分别为:电源、地及控制。电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V—6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)。甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理。
输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在1ms—2ms 之间,而低电平时间应在5ms到20ms之间,并不很严格,下表表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂位置的关系:
4、伺服马达的电源引线
电源引线有三条,如图中所示。伺服马达三条线中红色的线是控制线,接到控制芯片上。中间的是SERVO工作电源线,一般工作电源是5V。第三条是地线
5、伺服马达的运动速度
伺服马达的瞬时运动速度是由其内部的直流马达和变速齿轮组的配合决定的,在恒定的电压驱动下,其数值唯一。但其平均运动速度可通过分段停顿的控制方式来改变,例如,我们可把动作幅度为90o的转动细分为128个停顿点,通过控制每个停顿点的时间长短来实现0o—90o变化的平均速度。对于多数伺服马达来说,速度的单位由“度数/秒”来决定。
6、使用伺服马达的注意事项
除非你使用的是数码式的伺服马达,否则以上的伺服马达输出臂位置只是一个不准确的大约数。
普通的模拟微型伺服马达不是一个精确的定位器件,即使是使用同一品牌型号的微型伺服马达产品,他们之间的差别也是非常大的,在同一脉冲驱动时,不同的伺服马达存在±10o 的偏差也是正常的。
正因上述的原因,不推荐使用小于1ms及大于2ms的脉冲作为驱动信号,实际上,伺服马达的最初设计表也只是在±45o的范围。而且,超出此范围时,脉冲宽度转动角度之间
的线性关系也会变差。
要特别注意,绝不可加载让伺服马达输出位置超过±90o的脉冲信号,否则会损坏伺服马达的输出限位机构或齿轮组等机械部件。
模拟舵机和数字舵机的区别
传统模拟舵机和数字比例舵机(或称之为标准舵机)的电子电路中为AA51883的鸿海微电子的系列模拟舵机专用芯片,一般都称之为模拟舵机。模拟舵机由功率运算放大器等接成惠斯登电桥,根据接收到模拟电压控制指令和机械连动位置传感器(电位器)反馈电压之间比较产生的差分电压,驱动有刷直流电机伺服电机正/反运转到指定位置。数字比例舵机是模拟舵机最好的类型,由直流伺服电机、直流伺服电机控制器集成电路(IC),减速齿轮组和反馈电位器组成,它由直流伺服电机控制芯片直接接收PWM(脉冲方波,一般周期为20ms,脉宽1~2 ms,脉宽1 ms为上限位置,1.5ms为中位,2ms为下限位置)形式的控制驱动信号,迅速驱动电机执行位置输出,直至直流伺服电机控制芯片检测到位置输出连动电位器送来的反馈电压与PWM控制驱动信号的平均有效电压相等,停止电机,完成位置输出。
数码舵机电子电路中带MCU微控制器故俗称为数码舵机,数码舵机凭借比之模拟舵机具有反应速度更快,无反应区范围小,定位精度高,抗干扰能力强等优势已逐渐取代模拟舵机在机器人、航模中得到广泛应用。
在过去的几年,舵机的技术发展是非常迅速的,更小的体积,更高的速度,更大的扭力,这些都是舵机发展的方向。近年出现的"数码舵机",是舵机的一大进步。下面我们介绍一下数码舵机的一些知识,数码舵机在工作方式上的优点:
数码舵机比传统的模拟舵机,即使是使用无线圈马达的模拟舵机,在工作方式上也有很多优点。但是这些优点也同时带来了一些缺点。在这里,我们尝试将为大家分析数码舵机的好的方面和不好的方面,也为大家解除一些疑问。
首先,数码舵机和模拟舵机,在微处理器以外并没有什么分别(微处理器用于分析从接收机的输入信号,并控制马达转动)。但是,我们必须认识到数码舵机和模拟舵机的差别其实是非常大的,虽然它们有着相同的马达、齿轮和外壳、同样的反馈电位器,看起来极其相似。数码舵机最大的差别是在于它处理接收机的输入信号的方式。然后控制舵机马达初始电流的方式,减少无反应区(对小量信号无反应的控制区域),增加分辨率以及产生更大的固定力量。
传统的舵机在空载的时候,没有动力被传到舵机马达。当有信号输入使舵机移动,或者舵机的摇臂受到外力的时候,舵机会作出反应,向舵机马达传动动力(电压)。这种动力实际上每秒五十周期的,被调制成开/关脉冲的最大电压,并产生小段小段的动力。当加大每一个脉冲的宽度的时候,如电子变速器的效能就会出现,直到最大的动力/电压被传送到马达,马达转动使舵机摇臂指到一个新的位置。然后,当舵机电位器告诉电子部分它已经到达指定的位置,那么动力脉冲就会减小脉冲宽度,并使马达减速。直到没有任何动力输入,马达完全停止。
以下的三个图表各显示了两个周期的开/关脉冲。图1是空载的情况;图2是脉冲宽度较窄,比较小的动力信号被输入马达;图3是更宽,持续时间更长的脉冲,更多的输入动力。您可以想象,一个短促的动力脉冲,紧接着很长的停顿,并不能给马达施加多少激励,使其转动。这意味着如果有一个比较小的控制动作,舵机就会发送很小的初始脉冲到马达,这是非常低效率的。这也是为什么模拟舵机有“无反应区”的存在。比如说,舵机对于发射机的细小动作,反应非常迟钝,或者根本就没有反应。
数码舵机截然不同的优点和特性
第一,因为微处理器的关系,数码舵机可以在将动力脉冲发送到舵机马达之前,对输入的信号,根据设定的参数进行处理。这意味着动力脉冲的宽度,就是说激励马达的动力,可以根据微处理器的程序运算而调整,以适应不同的功能要求,并优化舵机的性能。
第二,数码舵机以高得多的频率向马达发送动力脉冲。就是说,相对与传统的50脉冲/秒,现在是300脉冲/秒。虽然,以为频率高的关系,每个动力脉冲的宽度被减小了,但马达在同一时间里收到更多的激励信号,并转动得更快。这也意味着不仅仅舵机马达以更高的频率响应发射机的信号,而且“无反应区”变小;反应变得更快;加速和减速时也更迅速、更柔和;数码舵机提供更高的精度和更好的固定力量。
如果您需要您的舵机具有以下特性:
更高的精度,更少的无反应区,更准确的定位;更快的控制反应,更强的加速;在舵机的整行程中更平均的扭力;舵机在一个位置上更强的固定力量。
那么,数码舵机是唯一的解决方案!
常见问题解决
一、舵机电机调速原理及如何加快电机速度
常见舵机电机一般都为永磁直流电动机,如直流有刷空心杯电机。直流电动机有线形的转速-转矩特性和转矩-电流特性,可控性好,驱动和控制电路简单,驱动控制有电流控制模式和电压控制两种模式。舵机电机控制实行的是电压控制模式,即转速与所施加电压成正比,驱
动是由四个功率开关组成H桥电路的双极性驱动方式,运用脉冲宽度调制(PWM)技术调节供给直流电动机的电压大小和极性,实现对电动机的速度和旋转方向(正/反转)的控制。电机的速度取决于施加到在电机平均电压大小,即取决于PWM驱动波形占空比(占空比为脉宽/周期的百分比)的大小,加大占空比,电机加速,减少占空比电机减速。
所以要加快电机速度:1、加大电机工作电压;2、降低电机主回路阻值,加大电流;二者在舵机设计中要实现,均涉及在满足负载转矩要求情况下重新选择舵机电机。
二、数码舵机的反应速度为何比模拟舵机快
很多模友错误以为:“数码舵机的PWM驱动频率300Hz比模拟舵机的50Hz高6倍,则舵机电机转速快6倍,所以数码舵机的反应速度就比模拟舵机快6倍”
。这里请大家注意占空比的概念,脉宽为每周期有效电平时间,占空比为脉宽/周期的百分比,所以大小与频率无关。占空比决定施加在电机上的电压,在负载转矩不变时,就决定电机转速,与PWM的频率无关。
模拟舵机是直流伺服电机控制器芯片一般只能接收50Hz频率(周期20ms)~300Hz左右的PWM外部控制信号,太高的频率就无法正常工作了。若PWM外部控制信号为50Hz,则直流伺服电机控制器芯片获得位置信息的分辨时间就是20ms,比较PWM控制信号正比的电压与反馈电位器电压得出差值,该差值经脉宽扩展(占空比改变,改变大小正比于差值)后驱动电机动作,也就是说由于受PWM外部控制信号频率限制,最快20ms才能对舵机摇臂位置做新的调整。
数码舵机通过MCU可以接收比50Hz频率(周期20ms)快得多的PWM外部控制信号,就可在更短的时间分辨出PWM外部控制信号的位置信息,计算出PWM信号占空比正比的电压与反馈电位器电压的差值,去驱动电机动作,做舵机摇臂位置最新调整。
结论:不管是模拟还是数码舵机,在负载转矩不变时,电机转速取决于驱动信号占空比大小而与频率无关。数码舵机可接收更高频率的PWM外部控制信号,可在更短的周期时间后获得位置信息,对舵机摇臂位置做最新调整。所以说数码舵机的反应速度比模拟舵机快,而不是驱动电机转速比模拟舵机快。
三、数码舵机的无反应区范围为何比模拟舵机小
根据上述对模拟舵机的分析可知模拟舵机约20ms才能做一次新调整。而数码舵机以更高频率的PWM驱动电机。PWM频率的加快使电机的启动/停止,加/减速更柔和,更平滑,更有效的为电机提供启动所需的转矩。就象是汽车获得了更小的油门控制区间,则启动/停止,加/减速性能更好。所以数码舵机的无反应区比模拟舵机小。
四、模拟舵机加装数码舵机驱动板并未提升反应速度
根据以上分析可知,模拟舵机加装数码舵机驱动板,要提升反应速度,PMW外部控制信号(如陀螺仪送来的尾舵机信号)的频率必须加快,如果还是50Hz,那舵机反应速度当然就没提升了。
五、如何选择舵机电机
舵机电机按直流伺服电机的标准选用,根据电机种类、负载力矩、转速、工作电压等要求。舵机一般都用空心杯电动机,有用有刷的,也有用无刷无感的。
空心杯电动机属于直流永磁、伺服微特电机,与普通电机的主要区别采用是无铁芯转子,也叫空心杯型转子。具有以下优势:
1、最大的能量转换效率(衡量其节能特性的指标):其效率一般在70%以上,部分产品可达到90%以上(普通铁芯电机在15-50%);
2、激活、制动迅速,响应极快:机械时间常数小于28毫秒,部分产品可以达到10毫秒以内,在推荐运行区域内的高速运转状态下,转速调节灵敏;
3、可靠的运行稳定性:自适应能力强,自身转速波动能控制在2%以内;
4、电磁干扰少:采用高品质的电刷、换向器结构,换向火花小,可以免去附加的抗干扰装置;
5、能量密度大:与同等功率的铁芯电机相比,其重量、体积减轻1/3-1/2;转速-电压、转速-转矩、转矩-电流等对应参数都呈现标准的线性关系。
六、如何选择舵机反馈电位器
舵机反馈电位器按种类、精度,耐用性的标准选用,导电塑料电位器的精度和耐磨程度大大优于其他如线绕电位器类型。
七、舵机控制死区、滞环、定位精度、输入信号分辨率、回中性能的认识
每一个闭环控制系统由于信号的振荡等原因,输入信号和反馈信号不可能完全相等,这就涉及到控制死区和滞环的问题,系统无法辨别输入信号和反馈信号的差异范围就是控制死区范围。舵机自动控制系统由于信号震荡、机械精度等原因造成控制系统在控制死区范围外的小范围老是做调整,为使舵机在小范围内不对震荡做调整,这就需要引入滞环的作用了。滞环比控制死区大,一般控制死区范围为±0.4%,滞环可设置为±2%,输入信号和反馈信号的差值在滞环内电机不动作,输入信号和反馈信号的差值进入滞环,电机开始制动-停止。定位精度取决于舵机系统的整体精度:如控制死区、机械精度、反馈电位器精度、输入信号分辨率。输入信号分辨率指舵机系统对输入信号最小分辨范围,数码舵机输入信号分辨率大大优于模拟舵机。回中性能取决于滞环和定位精度。
八、舵机为何会老发出吱吱的响声
舵机老发出吱吱的来回定位调整响声,是由于有的舵机无滞环调节功能,控制死区范围调得小,只要输入信号和反馈信号老是波动,它们的差值超出控制死区,舵机就发出信号驱动电机。另没有滞环调节功能,如果舵机齿轮组机械精度差,齿虚位大,带动反馈电位器的旋转步,步范围就已超出控制死区范围,那舵机必将调整不停,吱吱不停。
九、为何有的舵机炸机易烧电路板
有的舵机选用的功率器件电流大同时系统中设计有或芯片自带有过流保护功能,能检测出堵转过流及短路状态迅速停止电机驱动信号。还有可在电机回路接压敏电阻防止瞬间过压及在功率器件前端设计有吸收电容。此类舵机炸机堵转不容易烧电路板和电机。与舵机是金属齿还是塑料齿并无绝对关系。
十、舵机为何抖舵
控制死区敏感,输入信号和反馈信号因各种原因波动,差值超出范围,舵臂动,所以抖舵。
北京科宇通博科技有限公司
2009-06-12
目录 一.舵机PWM信号介绍 (1) 1.PWM信号的定义 (1) 2.PWM信号控制精度制定 (2) 二.单舵机拖动及调速算法 (3) 1.舵机为随动机构 (3) (1)HG14-M舵机的位置控制方法 (3) (2)HG14-M舵机的运动协议 (4) 2.目标规划系统的特征 (5) (1)舵机的追随特性 (5) (2)舵机ω值测定 (6) (3)舵机ω值计算 (6) (4)采用双摆试验验证 (6) 3.DA V的定义 (7) 4.DIV的定义 (7) 5.单舵机调速算法 (8) (1)舵机转动时的极限下降沿PWM脉宽 (8) 三.8舵机联动单周期PWM指令算法 (10) 1.控制要求 (10) 2.注意事项 (10) 3.8路PWM信号发生算法解析 (11) 4.N排序子程序RAM的制定 (12) 5.N差子程序解析 (13) 6.关于扫尾问题 (14) (1)提出扫尾的概念 (14) (2)扫尾值的计算 (14)
一.舵机PWM 信号介绍 1.PWM 信号的定义 PWM 信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。具体的时间宽窄协议参考下列讲述。我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。 目前,北京汉库的HG14-M 舵机可能是这个过渡时期的产物,它采用传统的PWM 协议,优缺点一目了然。优点是已经产业化,成本低,旋转角度大(目前所生产的都可达到185度);缺点是控制比较复杂,毕竟采用PWM 格式。 但是它是一款数字型的舵机,其对PWM 信号的要求较低: (1) 不用随时接收指令,减少CPU 的疲劳程度; (2) 可以位置自锁、位置跟踪,这方面超越了普通的步进电机; 其PWM 格式注意的几个要点: (1 ) 上升沿最少为0.5mS ,为0.5mS---2.5mS 之间; (2) HG14-M 数字舵机下降沿时间没要求,目前采用0.5Ms 就行;也就是说PWM 波形 可以是一个周期1mS 的标准方波; (3) HG0680为塑料齿轮模拟舵机,其要求连续供给PWM 信号;它也可以输入一个周 期为1mS 的标准方波,这时表现出来的跟随性能很好、很紧密。
/**********************舵机增量式PID算法*********************** double ref = 0;//设置参数设定值 double feb = 0;//采样反馈过程值 int pwm_var = 0; //PID调整量 int PWM_out = 0; //PWM输出量 double Uo = 0; double Ek = 0; double Ei = 0; double Ed = 0; #define Kp 8 //PID调节的比例常数 #define Ti 0.05 //PID调节的积分常数 #define Td 0.02 //PID调节的微分时间常数 #define T 0.02 //采样周期 #define Kpp Kp * ( 1 + (T / Ti) + (Td / T) ) #define Ki (-Kp) * ( 1 + (2 * Td / T ) ) #define Kd Kp * Td / T //#define Kpp 4 //#define Ki 0.8 //#define Kd 20 //误差的阀值,小于这个数值的时候,不做PID调整,避免误差较小时频繁调节引起震荡 #define Emin 3 //调整值限幅,防止积分饱和 #define Umax 100 #define Umin -100 //输出值限幅 #define Pmax 15500 #define Pmin 200 /////////////////////////////////////////////////////////////////// ////// PID运算 ///////
基于AT89C2051单片机的多路舵机控制器设计 摘要舵机是机器人、机电系统和航模的重要执行机构。舵机控制器为舵机提供必要的能源和控制信号。本文提出一种以外部中断计数为基础的PWM波形实现方法。该方法具有简单方便,成本低,可实现多路独立PWM输出的优点。 关键词A T89C205l 舵机控制器外部中断PWM 舵机是一种位置伺服的驱动器。它接收一定的控制信号,输出一定的角度,适用于那些需要角度不断变化并可以保持的控制系统。在微机电系统和航模中,它是一个基本的输出执行机构。 1 舵机的工作原理 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA66881。的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送人电机驱动集成电路BA6686,以驱动电机正反转。当电机转速一定时,通过级联减速齿轮带动电位器R。,旋转,直到电压差为O,电机停止转动。舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。 2 舵机的控制方法 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。 3 舵机控制器的设计 (1)舵机控制器硬件电路设计 从上述舵机转角的控制方法可看出,舵机的控制信号实质是一个可嗣宽度的方波信号(PWM)。该方波信号可由FPGA、模拟电路或单片机来产生。采用FPGA成本较高,用模拟电路来实现则电路较复杂,不适合作多路输出。一般采用单片机作舵机的控制器。目前采用单片机做舵机控制器的方案比较多,可以利用单片机的定时器中断实现PWM。该方案将20ms的周期信号分为两次定时中断来完成:一次定时实现高电平定时Th;一次定时实现低电平定时T1。Th、T1的时间值随脉冲宽度的变换而变化,但,Th+T1=20ms。该方法的优点是,PWM信号完全由单片机内部定时器的中断来实现,不需要添加外围硬件。缺点是一个周期中的PWM信号要分两次中断来完成,两次中断的定时值计算较麻烦;为了满足20ms 的周期,单片机晶振的频率要降低;不能实现多路输出。也可以采用单片机+8253计数器的实现方案。该方案由单片机产生计数脉冲(或外部电路产生计数脉冲)提供给8253进行计数,由单片机给出8253的计数比较值来改变输出脉宽。该方案的优点是可以实现多路输出,软件设计较简单;缺点是要添加l片8253计数器,增加了硬件成本。本文在综合上述两个单片机舵机控制方案基础上,提出了一个新的设计方案,如图4所示。 该方案的舵机控制器以A T89C2051单片机为核心,555构成的振荡器作为定时基准,单片机通过对555振荡器产生的脉冲信号进行计数来产生PWM信号。该控制器中单片机可以产生8个通道的PWM信号,分别由AT89C2051的P1.0~Pl.7(12~19引脚)端口输出。输出的8路PWM信号通过光耦隔离传送到下一级电路中。因为信号通过光耦传送过程中进行了反相,因此从光耦出来的信号必须再经过反相器进行反相。方波信号经过光耦传输后,前沿和后沿会发生畸变,因此反相器采用CD40106施密特反相器对光耦传输过来的信号进行整形,产生标准的PWM方波信号。笔者在实验过程中发现,舵机在运行过程中要从电源
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3. 舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有
FH24路舵机控制器使用说明书 飞鸿科技 2012-5-24 一、产品介绍 (1) 二、功能特点 (3) 三、接口说明 (4) 四、指令说明 (6) 五、16路舵机调试软件使用说明 (7) 二、连接PC上位机 (9) 三、上位机界面编辑 (10) 四、单路舵机调试 (11) 五、动作组编辑 (12) 六、注意事项及故障解决 (13) 产品介绍 一、 一、产品介绍 设计该舵机控制板是为了方便新手学习多路舵机的控制。多路舵机控制并不很复杂,但至今网上关于多路舵机控制的资源很少,当前淘宝上的舵机控制板也都不提供程序代码。由于这些原因,大批的机器人爱好者不能掌握多路舵机控制。使得很多机器人爱好者停滞不前,在这些最基本的地方浪费大量时间,不能不精力放到更高层的机器人控制方面的研究。如果每个人
都从头做起,整体的进步必将非常的缓慢。别人做好的东西我们不妨拿来学习,这样要节省很多的时间与精力。在这个基础上继续前进,做出属于自己的更高级的机器人。 由于本人在这些基础的东西上耗费的大量的精力,导致我没有时间去做高级的控制,如自平衡,语音识别等。大学接近尾声,没能让自己的机器人进一步升级感到非常遗憾。 基于方便学习的原则,本板子的设计有一下几个特点: 1、选用大家熟悉的,容易掌握的51单片机。但不是普通51单片机,是功能强大的增强型单片机STC12C5A60S2。 有人说51控制的精度肯定不如ARM。是的,这是明显的事实。但是我用ARM的芯片来写教程,只能给少数人看,而且如果那个人ARM掌握的都很好了,也不需要看此教程了。该控制板设计的目的就是给机器人初级爱好者学习,仅仅因为这一点,选择51单片机是最恰当不过了。 我最初做的32路舵机控制板就是在arm芯片上做的,那些不适合新手学习,在51上学会了舵机控制的基本方法,等你会使用更高级单片机的时候可以很容易的移植到上面,实现更多舵机,更高精度的控制。 STC12C5A60S2单片机属于增强型51。他兼容传统的51单片机,也就是说,你原来的学习的、编写的51程序不用改动就能在这个单片机上直接使用,不会出现问题,而且速度提高8~12倍。但是它与传统51相比,在速度性能与资源方面都有了很大的提升。 (1)60K的flash程序存储器。89C52只有8K。 (2)1280字节的SRAM。你课本上学的RAM只有128字节。1280足够用了,省去外部扩展的麻烦。 (3)两个串口。 (4)独立波特率发生器。做机器人定时器往往很不够用,而传统51单片机串口通信还要占用定时器,有了独立波特率发生器就可以节省出一个定时器。 (5)PCA模块。可以硬件输出快速PWM。可以扩展出两个定时器。 (6)8路A/D转换通道。A/D转换在机器人、各种比赛中都很常用,使用这款单片机就不必再做AD转换电路。 2、程序下载接口、IO口引出。该板是单片机最小系统板+16路舵机控制板。不是单纯的舵机控制板,而是一款可以用来学习、编程、二次开发的开发板。可以直接用来参加比赛,DIY,毕业设计。 5、详细的教程,丰富的资料。该板子是淘宝中唯一提供程序代码、可以学习的舵机控制板。提供原理图、接口示意图、程序代码、上位机软件。另外购买该产品赠送本人搜集的单片机开发常用工具软件,机器人资料,单片机视频教程以及丰富的例程。
舵机及舵机的控制 1.什么是舵机: 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 还是看看具体的实物比较过瘾一点: 2.其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3.舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为 0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关 系是这样的:
0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 请看下形象描述吧: 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有关了。一些前辈喜欢用555来调舵机的驱动脉冲,如果只是控制几个点位置伺服好像是可以这么做的,可以多用几个开关引些电阻出来调占空比,这么做简单吗,应该不会啦,调试应该是非常麻烦而且运行也不一定可靠的。其实主要还是他那个年代,单片机这东西不流行呀,哪里会哟! 使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。听说AVR也有控制32个舵机的试验板,不过精度能不能达到2微秒可能还是要泰克才知道了。其实测试起来很简单,你只需要将其控制信号与示波器连接,然后让试验板输出的舵机控制信号以2微秒的宽度递增。
舵机控制板使用说明V1.2 产品特点 ●采用32位ARM 内核的处理器芯片 ●独创的在线升级机制,用户可以在线升级固件 ●自动识别波特率 ●采用USB和UART通讯接口 ●1us的控制精度(相当于舵机的0.09度) ●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时 同步控制16个舵机) ●内置512K 存储芯片,可存储上百个动作组 ●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语) ●拥有Android手机控制软件 供电 舵机控制板需要2个电源: 舵机电源和芯片电源 舵机电源(正极):VS(图中3号位置的蓝色接线端子的左端) 舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间) 舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。 芯片电源(正极):VSS(图中3号位置的蓝色接线端子的右端)
芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间) VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。 另外: 1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。 2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必 须是5V。 3. 图中1、2、3号位置都可以给芯片供电,任选其一即可。 4. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表 示芯片供电异常。 5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表 示舵机供电异常。 如果需要控制舵机,2个绿色的LED灯都亮是前提条件。
智能车的制作中,看经验来说,舵机的控制是个关键.相比驱动电机的调速,舵机的控制对于智能车的整体速度来说要重要的多. PID算法是个经典的算法,一定要将舵机的PID调好,这样来说即使不进行驱动电机的调速(匀速),也能跑出一个很好的成绩. 机械方面: 从我们的测试上来看,舵机的力矩比较大,完全足以驱动前轮的转向.因此舵机的相应速度就成了关键.怎么增加舵机的响应速度呢?更改舵机的电路?不行,组委会不允许.一个非常有效的办法是更改舵机连接件的长度.我们来看看示意图: 从上图我们能看到,当舵机转动时,左右轮子就发生偏转.很明显,连接件长度增加,就会使舵机转动更小的转角而达到同样的效果.舵机的特点是转动一定的角度需要一定的时间.不如说(只是比喻,没有数据),舵机转动10度需要2ms,那么要使轮子转动同样的角度,增长连接件后就只需要转动5度,那么时间是1ms,就能反应更快了.据经验,这个舵机的连接件还有必要修改.大约增长0.5倍~2倍. 在今年中,有人使用了两个舵机分别控制两个轮子.想法很好.但今年不允许使用了.
接下来就是软件上面的问题了. 这里的软件问题不单单是软件上的问题,因为我们要牵涉到传感器的布局问题.其实,没有人说自己的传感器布局是最好的,但是肯定有最适合你的算法的.比如说,常规的传感器布局是如下图: 这里好像说到了传感器,我们只是略微的一提.上图只是个示意图,意思就是在中心的地方传感器比较的密集,在两边的地方传感器比较的稀疏.这样做是有好处的,大家看车辆在行驶到转弯处的情况: 相信看到这里,大家应该是一目了然了,在转弯的时候,车是偏离跑道的,所以两边比较稀疏还是比较科学的,关于这个,我们将在传感器中在仔细讨论。 在说到接下来的舵机的控制问题,方法比较的多,有人是根据传感器的状态,运用查表法差出舵机应该的转角,这个做法简单,而且具有较好的滤波"效果",能够将错误的传感器状态滤掉;还有人根据计算出来的传感器的中心点(比
舵机及转向控制原理 令狐采学 1、概述 2、舵机的组成 3、舵机工作原理 4、舵机选购 5、舵机使用中应注意的事项 6、辉盛S90舵机简介 7、如何利用程序实现转向 8、51单片机舵机测试程序 1、概述 舵机也叫伺服电机,最早用于船舶上实现其转向功能,由于可以通过程序连续控制其转角,因而被广泛应用智能小车以
实现转向以及机器人各类关节运动中,如图1、图2所示。 令狐采学创作 图1舵机用于机器人 图2舵机用于智能小车中 舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制部分重要的组成部分,图3为舵机的外形图。 图3舵机外形图 2、舵机的组成 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿 轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5所示。 图4舵机的组成示意图 图5舵机组成
舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V, —令狐采学创作是6.0V,分别对应不同的转矩标准,即输出力矩不 同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。 图6舵机的输出线 3、舵机工作原理 控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。其工作流程为:控制信号一控制电路板―电机转动-齿轮组减速-舵盘转动?位置反馈电位计-控制电路板反馈。
舵机的原理,以及数码舵机VS模拟舵机 一、舵机的原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。 有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的:
收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20ms(即频率为50Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
课程设计项目说明书 舵机控制型机器人设计 学院机械工程学院 专业班级2013级机械创新班 姓名吴泽群王志波谢嘉恒袁土良指导教师王苗苗 提交日期 2016年4 月1日
华南理工大学广州学院 任务书 兹发给2013级机械创新班学生吴泽群王志波谢嘉恒袁土良 《产品设计项目》课程任务书,内容如下: 1. 题目:舵机控制型机器人设计 2.应完成的项目: 1.设计舵机机器人并实现运动 2.撰写机器人说明书 3.参考资料以及说明: [1] 孙桓.机械原理[M].北京.第六版;高等教育出版社,2001 [2] 张铁,李琳,李杞仪.创新思维与设计[M].国防工业出版社,2005 [3] 周蔼如.林伟健.C++程序设计基础[M].电子工业出版社.北京.2012.7 [4] 唐增宏.常建娥.机械设计课程设计[M].华中科技大学出版社.武汉.2006.4 [5] 李琳.李杞仪.机械原理[M].中国轻工业出版社.北京.2009.8 [6] 何庭蕙.黄小清.陆丽芳.工程力学[M].华南理工大学.广州.2007.1 4.本任务书于2016 年2 月27 日发出,应于2016 年4月2 日前完 成,然后提交给指导教师进行评定。 指导教师(导师组)签发2016年月日
评语: 总评成绩: 指导教师签字: 年月日
目录 摘要 (1) 第一章绪论 (2) 1.1机器人的定义及应用范围 (2) 1.2舵机对机器人的驱动控制 (2) 第二章舵机模块 (3) 2.1舵机 (3) 2.2舵机组成 (3) 2.3舵机工作原理 (4) 第三章总体方案设计与分析 (6) 3.1 机器人达到的目标动作 (6) 3.2 设计原则 (6) 3.3 智能机器人的体系结构 (6) 3.4 控制系统硬件设计 (6) 3.4.1中央控制模块 (7) 3.4.2舵机驱动模块 (7) 3.5机器人腿部整体结构 (8) 第四章程序设计 (9) 4.1程序流程图 (9) 4.2主要中断程序 (9) 4.3主程序 (11) 参考文献 (13) 附录 (14) 一.程序 (14) 二.硬件图 (17)
根据前面介绍的CMOS图像传感器采集处理得到的只是40行中每一行的黑线坐标。 并没有得出赛道的具体形状,到底是直道还是弯道,是大弯还是急弯,是偏向一个方向的弯道还是“S型”弯道,是“大S型”弯道还是“小S型”弯道。这就可以通过曲率的计算来得出。下面给出曲率的具体计算方法。 首先,将扫描到的40行中每9行分为一组,而且彼此交叉,也就是说,在能扫描到的情况下,划分为从第0行到第8行,从第1行到第9行,从第2行到第10行,依此类推,最后从21行到第29行,一共可以划分为22段,分别计算每一段的曲率,以第一段为例,计算的方法为:将第i行的坐标定义为coordinate[i],将CMOS图像传感器的中心坐标定义为middle,那么每一行相对于中心坐标的偏差就为 ek[i]=coordinate[i]-middle (4.1) 再乘以每一行各自的校正值emendation[i],计算公式为 ek[i]=ek[i]*emendation[i] (4.2) 就得到了各行实际偏离中心位置的距离。然后用第0行的偏差加上第8行的偏差之和除以2再减去第4行的偏差,得出一个相对偏差ek_comparatively。ek_comparatively的计算公式为 ek_comparatively=(ek[8]+ek[0])/2-ek[4] (4.3) 然后计算出该段曲线对应的直道,即将第0行的黑点与第8行的黑点直接相连的直线的长度计算出来,计算公式为 distance_beeline=sqrt((ek[8]-ek[0])*(ek[8]-ek[0])+48*48) (4.4) 最后将公式(4.3)除以公式(4.4),得到最后曲线的弯曲度为curve_degree。计算公式为 curve_degree=ek_comparatively/ distance_beeline (4.5) 就得出了曲线的弯曲程度,然后根据每一段的弯曲程度,最终得出所扫描到的全部道路的形状。 4.2.2 道路形状精确识别算法 利用4.1.3中对道路弯曲程度的计算,根据扫描到的道路每段的弯曲程度,可以对道路形状进行较为精确的识别,在进行具体的道路识别之前,先给出几个比较模糊的概念,这是描述弯道的弯曲程度的,弯曲程度非常小,比较小,比较大,非常大。这几个概念在下面对于赛道具体识别时有提及。 (1)直道的识别
舵机工作原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。
3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。
有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的: 收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能
提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用图3来表示。 可变脉宽输出试验(舵机控制) 原创:xidongs 整理:armok / 2004-12-05 / https://www.doczj.com/doc/661275678.html,
舵机的相关原理与控制原理 1. 什么是舵机: 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 还是看看具体的实物比较过瘾一点: 2.其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5m s的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
3.舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 请看下形象描述吧: 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的
利用单片机PWM信号进行舵机控制(图) 基于单片机的舵机控制方法具有简单、精度高、成本低、体积小的特点,并可根据不同的舵机数量加以灵 活应用。 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。 图1舵机的控制要求 舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。一般舵机的控制要求如图1所示。 单片机实现舵机转角控制 可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz(周期是20ms)的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用。5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到舵机的控制精度要求。 也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。 单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM周期信号,本设
MG996R舵机控制方法 红:+5v,棕:GND,黄:信号 基于单片机的舵机控制方法具有简单、精度高、成本低、体积小的特点,并可根据不同的舵机数量加以灵活应用 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。 图1 舵机的控制要求 舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。一般舵机的控制要求如图1 所示。 单片机实现舵机转角控制 可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz(周期是20ms)的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用。5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到舵机的控制精度要求。
也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。 单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比。 当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。 具体的设计过程:例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18m,s 所以开始时在控制口发送高电平,然后设置定时器在 2ms 后发生中断,中断发生后,在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM信号输出到舵机。用修改定时器中断初值的方法巧妙形成了脉冲信号,调整时间段的宽度便可使伺服机灵活运动。 为保证软件在定时中断里采集其他信号,并且使发生PWM信号的程序不影响中断程序的运行(如果这些程序所占用时间过长,有可能会发生中断程序还未结束,下次中断又到来的后果),所以需要将采集信号的函数放在长定时中断过程中执行,也就是说每经过两次中断执行一次这些程序,执行的周期还是20ms。 软件流程如图2 所示。
1.什么是舵机: 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 2.其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3.舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为 0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关 系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 请看下形象描述吧:
这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有关了。一些前辈喜欢用555来调舵机的驱动脉冲,如果只是控制几个点位置伺服好像是可以这么做的,可以多用几个开关引些电阻出来调占空比,这么做简单吗,应该不会啦,调试应该是非常麻烦而且运行也不一定可靠的。其实主要还是他那个年代,单片机这东西不流行呀,哪里会哟! 使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。听说AVR也有控制32个舵机的试验板,不过精度能不能达到2微秒可能还是要泰克才知道了。其实测试起来很简单,你只需要将其控制信号与示波器连接,然后让试验板输出的舵机控制信号以2微秒的宽度递增。 为什么FPPA就可以很方便地将脉宽的精度精确地控制在2微秒甚至2微秒一下呢。主要还是 delay memory这样的具有创造性的指令发挥了功效。该指令的延时时间为数据单元中的立即数的值加1个指令周期(数据0出外,详情请参见delay指令使用注意事项)因为是8位的数据存储单元,所以memory中的数据为(0~255),记得前面有提过,舵机的角度级数一般为1024级,所以只
舵机控制详解 Document number【AA80KGB-AA98YT-AAT8CB-2A6UT-A18GG】
本人学习了一段时间的舵机,将自己所遇到的问题与解决方案和大家分享一下,希望对初学者有所帮助!!!! 一、舵机介绍 1、舵机结构 舵机简单的说就是集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的外壳里的伺服单元。 舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文 servo。 舵机组成:舵盘、减速齿轮、位置反馈电位计、直流电机、控制电路板等。 舵盘 上壳 齿轮组 中壳 电机 控制电路 控制线 下壳 工作原理:控制信号控制电路板电机转动齿轮组减速 舵盘转动位置反馈电位器控制电路板反馈 简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动; 齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍 数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角 度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动 到目标角度或保持在目标角度。 舵机接线方法:三线接线法:(1)黑线(地线) 红线(电源线)两个标准:和6V 蓝线/黄线(信号线) (2)棕线(地线) 红线(电源线)两个标准:和6V
黄线(信号线) 二、舵机PWM信号介绍 1、PWM信号的定义 PWM信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。具体的时间宽窄协议参考下列讲述。我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。 关于舵机PWM信号的基本样式如下图 其PWM格式注意的几个要点: (1)上升沿最少为,为之间; (2)控制舵机的PWM信号周期为20ms; 2.PWM信号控制精度制定 1 DIV = 8uS ; 250DIV=2mS PWM上升沿函数: + N×DIV 0uS ≤ N×DIV ≤ 2mS ≤ +N×DIV ≤ 3、舵机位置控制方法 舵机的转角达到185度,由于采用8为CPU控制,所以控制精度最大为256份。目 8位AT89C52CPU,其数 据分辨率为256,那么经过 舵机极限参数实验,得到应 该将其划分为250份。 那么的宽度为2mS = 2000uS。 2000uS÷250=8uS 则:PWM的控制精度为8us 我们可以以8uS为单位 递增控制舵机转动与定位。 舵机可以转动185度, 那么185度÷250=度, 则:舵机的控制精度为度