第35卷,增刊红外与激光工程2006年10月V ol.35 Supplement Infrared and Laser Engineering Oct.2006
红外、雷达协同探测跟踪模型
贺有
(炮兵学院南京分院,江苏南京 211132)
摘要:雷达一直是战场进行目标跟踪识别的重要传感器,但是由于雷达在工作时要向空中辐射大功率电磁波,因而易遭受“电子对抗、反辐射导弹、隐身飞机和超低空突防”这“四大威胁”的攻击。和雷达不同,红外探测系统通过接收目标辐射源的电磁辐射进行探测和定位,因而不易被侦察或定位,具有强的抗干扰能力;此外,红外系统还可以获得目标的图像特征可进行目标识别。红外、雷达配合使用可成为相互独立又彼此补充的探测跟踪手段,本文中给出了红外探测系统与雷达协同探测的目标跟踪仿真模型。
关键词:雷达;目标跟踪;红外图像;仿真模型
中图分类号:TN219 文献标识码:A 文章编号:1007-2276(2006)增D-0306-06 Simulation model for combinatorial detecting and tracking
process of IR and radar
HE You
(Nanjing Artillery Academy, Nanjing 211132, China)
Abstract: IR sensors detecting in coordination with radar is a new trend in early-warning detecting systems. Radar and IR sensor are limited in respective aspects, however, the combination utilization of radar and IR sensor can make significant difference in the detecting capability. Moreover, a better precision and improved survivability could be derived for such a combination. The simulation model for the detecting and tracking process of such a combination is given.
Key words: Radar; Target tracking; Infrared image; Simulation model
0引言
有源雷达一直是战场进行目标跟踪识别的重要传感器,但是由于雷达在工作时要向空中辐射大功率电磁波,因而易遭受“电子对抗、反辐射导弹、隐身飞机和超低空突防”这“四大威胁”的攻击。和雷达不同,红外探测通过接收目标辐射源的电磁辐射进行探测和定位,因而不易被侦察或定位,具有强的抗干扰能力;此外,红外系统还可以获得目标的图像特征可进行目标识别。红外已成为重要的被动探测手段。但是,红外也有其缺点,而红外、雷达配合使用可成为相互独立又彼此补充的探测跟踪手段。红外传感器的正确使用,
收稿日期:2006-08-14
作者简介:贺有(1965-),男,山西运城人,副教授,主要从事情报侦察指挥方面的研究。
增刊贺有等:红外、雷达协同探测跟踪模型 307
可有效提高系统对目标的探测精度,并减少雷达的电磁辐射时间,从而使系统降低对敌方干扰的脆弱性,提高系统可靠性和正确性。具体体现在[1,2]:(1)雷达对远距离目标进行搜索,一旦发现目标,可为红外传感器提供目标的方位,红外传感器根据雷达的指示,当目标进入探测区域后,对目标进行识别跟踪;(2)红外传感器对近距离内的目标进行搜索,并对发现的目标进行识别,确定需要跟踪的目标,一旦确定了目标之后,就引导或指示雷达网中的合适雷达迅速跟踪目标;(3)当雷达保持无线电静寂或受到敌方干扰而不能工作时,红外传感器可独立地进行搜索、探测和跟踪。
1红外探测系统对雷达进行引导
红外探测系统对雷达的引导的时间一般有两种:
(1)正常引导,红外探测系统在解算得到目标位置之后,迅速解算出被引导的雷达视域中心的方位,由于雷达本身具有一定的视域范围,其引导精度预计比较理想。红外探测系统对雷达网进行引导的方式有静态引导和动态引导两种方式。正常引导方式比较简单,因此系统的反应能力也较高。
(2)异常引导,是当红外系统异常的情况下(干扰、通信故障等),将红外探测系统已经检测到且跟踪的目标转交给雷达处理,因此在一般情况下简单的静态引导不能提供满意的成功引导概率,尤其是当红外系统的定位误差较大时,成功引导概率将会更低,因此雷达需要对红外系统的整个视域进行搜索,即红外对雷达网进行动态的引导,以获得一个满意的成功引导概率。
P贡献最大的原则出发,指示雷达网红外探测系统对雷达动态引导的基本过程是:按照对成功引导概率
cue
中最优雷达进行跟踪;在红外的引导下,雷达的视域中心应首先对准?θ,并在该方位对应的俯仰方向进行搜索,然后再依次向左右方向搜索。
2 红外、雷达多传感器跟踪模式
共有三种跟踪模式:
模式 1 主要适用于目标相对于雷达背向飞行的情况。当目标相对于雷达背向飞行时,该目标的威胁等级比较低,因此可以放宽对该目标的跟踪要求,只要指派一部雷达对其进行跟踪,并且进行跟踪的雷达只需分配有限的几次雷达辐射给该目标就可以了。
模式 2 主要适用于目标相对于雷达相向飞行且处于较远距离时的情况。当目标相向飞行时其威胁等级较高,但由于处于较远距离上,跟踪要求不高时,也可以只指派一部雷达进行跟踪,被指派雷达采用等间隔辐射这种较简单的辐射控制方式。
模式 3 主要适用于目标相向飞行且处于较近距离上时的情况。在这种情况下,目标的威胁等级最高,因此需要根据情况指派多部雷达对其进行跟踪,并且被指派雷达的辐射应该根据跟踪的要求进行实时的控制。
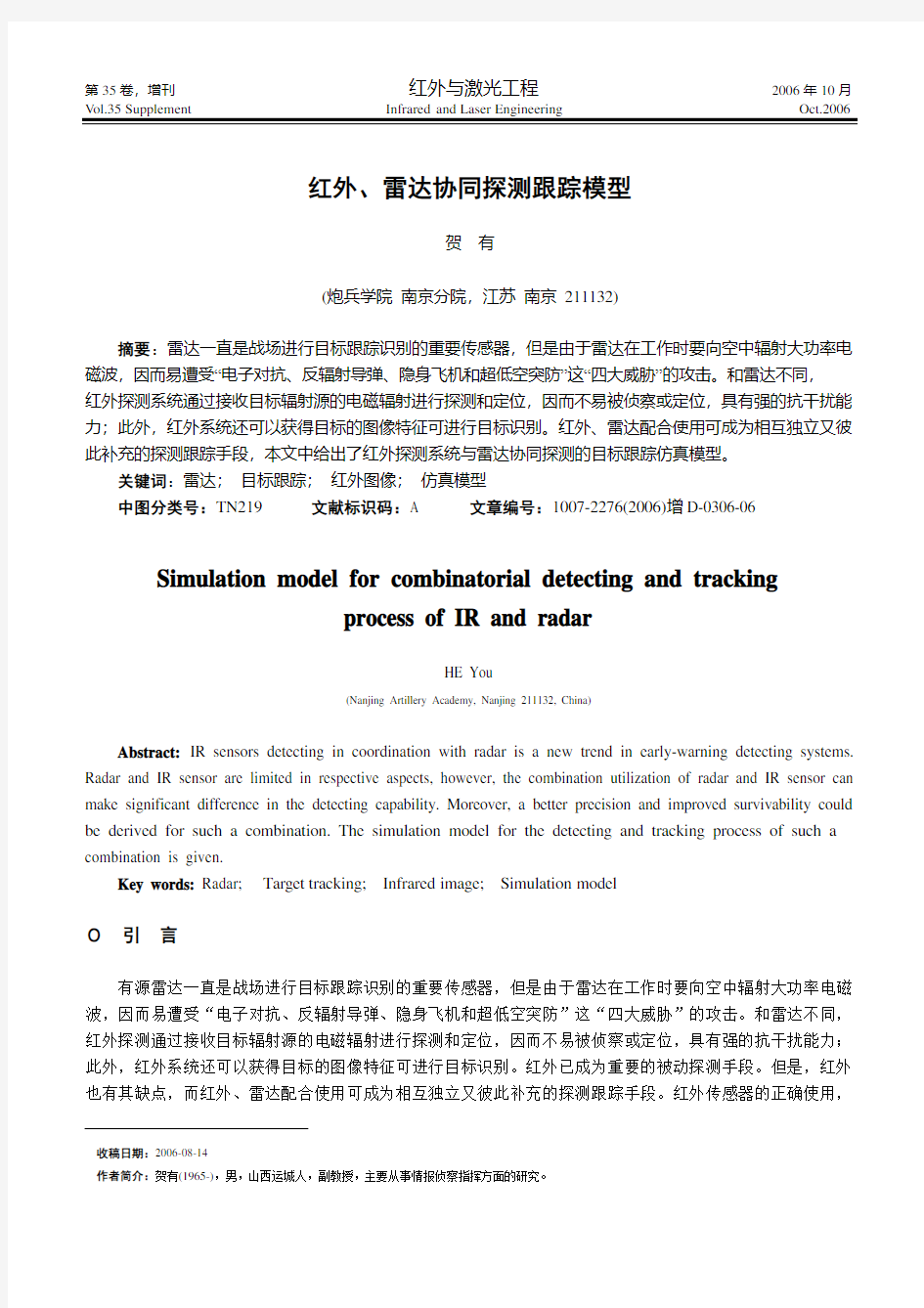
图1所示为雷达和红外综合工作的基本过程。在红外探测系统探测到敌方红外辐射源并测得目标的方位信息以后,就计算出雷达网中合适的雷达进行跟踪,并对该雷达进行引导,雷达开机并在被动传感器指向视域内进行搜索,当截获目标以后,对目标航迹进行起始;为了尽可能地降低我雷达辐射被敌方电子侦察设备截获的概率,在对目标航迹快速起始以后,雷达马上关机,由红外探测系统对目标继续进行跟踪。但是红外探测系统在对目标进行跟踪滤波时要解决滤波发散和航迹断续(无辐射信号)的问题,因此经过一段时间以后,雷达按照一定的要求(或者规则)再进行一次(或者多次)辐射,以对目标跟踪进行修正,当目标跟踪效果到达要求时雷达再次关机,如此反复,其基本要求是在满足一定的跟踪效果要求的前提下尽可能地压缩雷达的工作时间,从优化理论的角度来讲就是要满足以下的式子:
308 红外与激光工程:光电信息处理技术 第35卷
min .. T s t M η??≤?
(1) 式中:T 为雷达辐射总时间(也可以是雷达辐射的次数);M 为雷达跟踪效果的指标;η为指标须满足的要求。
图1 红外探测系统和雷达综合跟踪结构示意图
Fig.1 Integrated tracking structure for IR and radar
增刊 贺 有等:红外、雷达协同探测跟踪模型 309
当雷达网中的雷达采取不同的跟踪模式时,需要对雷达辐射源进行控制。根据以上的跟踪模式,主要有三种控制方式:有限次数辐射控制、等间隔辐射控制、实时辐射控制。
有限次数辐射控制 设对目标进行跟踪的时间为T ,在此时间段内,红外探测系统进行N 次测量,而雷达由于其电磁辐射受到限制,只能进行M 次测量,假设该系统进行测量的起始参考时间为ref t ,对雷达的辐
射规划也就是要得出雷达辐射的最佳时刻1{,.....,,....,}i M τττ,使得费歇尔信息矩阵(FIM )的行列式最大,即:
11ref {,.....,,....,}
{,.....,,....,}arg max (det(()))i M i M FIM t ττττττ= (2)
FIM 的行列式的计算如下:
''''''
''''''3200det()det ((,,))det ((,))T T
FIM FIM T FIM T ττττττττττ≤≤≤≤≤≤=?=
+∑∑ (3) 'RAD 2
'22''2224440bear det ((,))()[1(())]t t T R FIM T t t tt t t R ττθ
τσσ≤≤≤=?+?++∑ (4) RAD '''''''''23226bear 1
det ((,,))[()]R FIM T T R ττττττθ
σσ=? (5) 式中:θ 为方位角的变化率;R 为在参考时间为ref
t 时刻观察者和目标之间的距离。表1所示为有限次数雷达辐射在时间上的规划。
表1 雷达辐射规划
Tab.1 Radar radiation programming
雷达辐射次数
雷达辐射规划 2
120; T ττ== 3
1230; 1;T τττ===或者1230; 1;T T τττ==?= 4
12340; 1;1;T T ττττ===?= 5 123450; 1;2;1;T T τττττ====?=或者123450; 1;2;1;T T T τττττ===?=?=
等间隔辐射控制 雷达进行等间隔辐射是最简单的辐射控制方式,其辐射间隔是离线计算的,计算所要求的辐射间隔的主要步骤如下:
(1) 在雷达对目标航迹起始以后,根据红外探测系统对目标身份的判断以及战斗要求,确定所需要对目标进行跟踪的时间T ;
(2) 假设红外探测系统测量间隔为IR τ,则在时间T 内,红外探测系统测量次数为:
IR T
n τ= (6)
(3) 假定雷达等间隔辐射的间隔长度为RAD τ,则在时间T 内,雷达辐射次数为:
310 红外与激光工程:光电信息处理技术 第35卷
RAD T
m τ=
(7)
(4) 采用圆概率跟踪误差(CEP )来作为评判跟踪效果的标准:
d = (8)
式中:x σ、y σ、z σ分别为雷达在x y z 、、方向上对目标的测量误差的均方差,假设测量误差服从高斯分布的。
(5) 在主动雷达等间隔辐射的情况下,其辐射控制的基本要求是在满足一定的跟踪效果要求的情况下使得主动雷达辐射间隔RAD τ最大化,即公式(1)可以改写为以下的形式:
RAD max .. s t d τη??≤?
(9) 式中:η为跟踪误差所要达到的一定指标。
在利用雷达等间隔辐射控制的方法进行雷达网的管理和综合时,主动雷达的辐射间隔是预先计算好的,即根据不同的目标类型、目标距离、战斗需要等各种因素,利用公式(6)~(9)的方法,计算出雷达辐射所能够达到的最大间隔RAD τ。
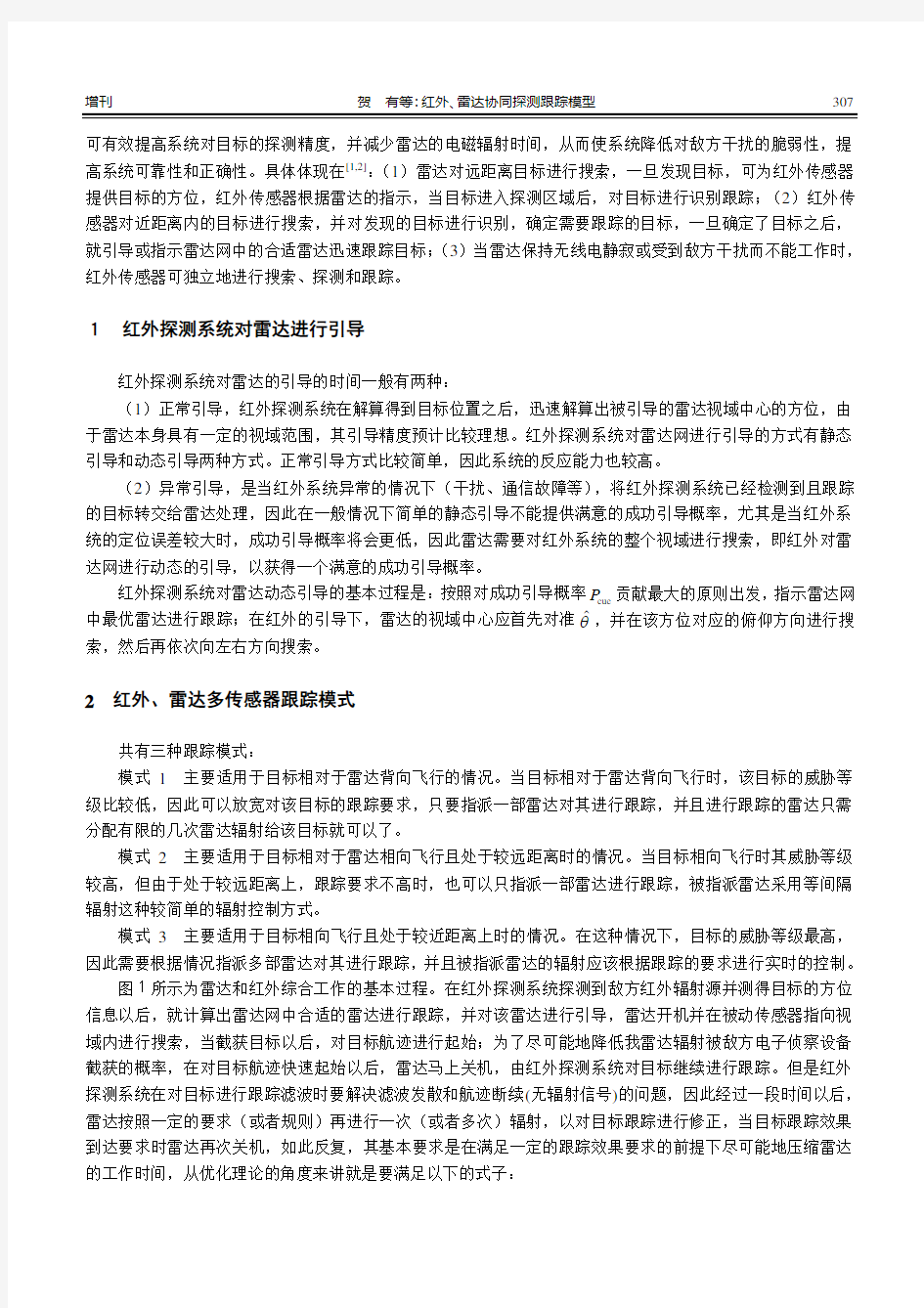
实时辐射控制 雷达是否发射电磁波主要由系统对目标跟踪的实时效果评估来决定,如图2所示。
用目标状态信息量I 来表征对目标跟踪的效果。当目标的不确定性越大时,该目标对观察者来讲其状态信息量越大,反之,状态信息量越小,因此对目标跟踪的要求就是要使得状态信息量低于某一个指标。目标状态信息量的表达式为:
||(|)||k k I t t =P
(10)
式中:(|)k k t t P 表示k t 时刻得到更新的目标误差协方差矩阵,||(|)||k k t t P 表示(|)k k t t P 的范数。
图2 雷达辐射实时控制示意图
Fig2 Real-time control flow for radar radiation
确定了对目标状态信息量的计算方法后,在对目标跟踪的过程中可以在各个k t 时刻根据公式(10)实时计算出目标状态信息量,并根据目标状态信息量的大小来决定是否需要雷达对目标进行探测。假设η为判断目标状态信息量是否符合要求的一个门限,则当I η≤时,说明此时对目标状态的估计满足要求,此时雷达可以不
增刊 贺 有等:红外、雷达协同探测跟踪模型 311 对外辐射电磁波,当I η>时,说明此时对目标状态的估计不满足要求,因此需要雷达对目标进行测量,以对其状态估计进行修正。门限η可以表示如下:
()k ηλ=R (11)
式中:()k R 为多传感器系统对目标测量的误差协方差矩阵;λ为辐射控制比例因子;λ的大小反映了对目标跟踪精度的要求。
一般来说[2],战场中典型的目标运动状态有匀速直线运动目标、机动目标以及杂波环境下的交叉目标等几种情况。对于匀速直线运动的目标,采用扩展Kalman 滤波(EKF )方法进行跟踪,对于机动目标,采用交互多模型滤波方法进行跟踪,对于杂波环境下的交叉目标,采用最近邻联合概率数据互联(NN-JPDA )的方法进行跟踪。
3 结束语
红外探测与雷达探测两种手段综合运用,可使系统具如下增益:系统具有更强的抗干扰能力及持续工作能力,系统具有更强的生存能力,系统具有更高的对低可探测性目标的探测能力,因此将来需对红外与雷达协同探测和数据融合技术进行深入的研究。
参考文献:
[1] 何友,王国宏.多传感器信息融合及应用[M].北京:电子工业出版社,2000.
[2] 何友,修建娟.雷达数据处理及应用[M].北京:电子工业出版社,2005.
地质雷达测量技术 内容提要:本文在简述地质雷达基本原理的基础上,介绍了地质雷达检测隧道衬砌质量的工作方法,通过理论分析、实际资料计算、实测效果等方面说明采用地质雷达技术检测隧道衬砌质量的必要性和可靠性。 关键词:地质雷达测量技术 1 前言 地质雷达(Geological Radar)又称探地雷达(Ground Penetrating Radar),是一项基于不破坏受检母体而获得各项检测数据的检测方法,在我国已在数百项工程中得到了应用,并取得了显著成效。同时,随着交通、水利、市政建设工程等基础设施的大力发展,以及国家对工程质量的日益重视,工程实施过程中仍急需用物理勘探的手段解决大量的地质难题,因此,地质雷达极其探测技术市场前景十分广阔。 地质雷达作为一项先进技术,具有以下四个显著特点:具有非破坏性;抗电磁干扰能力强;采用便携微机控制,图象直观;工作周期短,快速高效。它不仅用于管线探测,还可用于工程建筑,地质灾害,隧道探测,不同地层划分,材料,公路工程质量的无损检测,考古等等。 2 地质雷达技术原理 地质雷达是运用瞬态电磁波的基本原理,通过宽带时域发射天线向地下发射高频窄脉冲电磁波,波在地下传播过程中遇到不同电性介质界面时产生反射,由接收天线接收介质反射的回波信息,再由计算机将收到的数字信号进行分析计算和成像处理,即可识别不同层面反射体的空间形态和介质特性,并精确标定物体的深度(图1)。
图1 地质雷达检测原理图 3 雷达的使用特性 3.1无损、连续探测,不破坏原有母体,避免了后期修补工作,可节约大量的时间和费用。 3.2 操作简便,使用者经过2-3天培训就能掌握。 探测时,主机显示器实时成像,操作人员可直接从屏幕上判读探测结果,现场打印成图,为及时掌握施工质量提供资料,提高了检测速度和科学水平。并且通过数据分析,还可以了解道路的结构情况,发现道路路基的变化和隐性灾害,使日常管理和维护更加简单。 3.3 测量精度高,测试速度快。在车载工作方式下,测试速度大大提高,当车速达80Km/h时,系统仍能正常工作。 3.4 收、发天线离地面的探测高度可以针对不同的埋地目标进行调整,以达到最佳的探测能力和探测分辨率:同时还可以调节收发天线之间的距离寻找系统工作的最好效果。 3.5 测点密度不受限制,便于点测和普查。 工作方式的灵活使得用户可以连续普查某一段工程的质量,也可随时对异常区域进行重点探测 和分析。 3.6 便于维护与保养。 本系统采用了结构化设计,对于使用不当或其它原因造成的质量问题,简单地更换接插件即可保证雷达的正常工作。 3.7 可扩充配置。 通过选择相应的发射源和收发天线,再配上相应的处理软件,就可以在中、深层探测范围,如地下管线、地基空洞、钢筋分布、堤坝密实程度等方面扩大应用。 4 地质雷达在检测隧道衬砌质量中的应用 新建隧道施工中为确保隧道衬砌质量,采用传统“钻、看”的检测方法显然已不能满足“多断面、全方位”的检测要求,业主和施工单位都在探索采用无损检测技术有效监控和确保隧道衬砌质量的新方法。 隧道衬砌的质量检测包括1)隧道衬砌厚度,2)隧道衬砌背后未回填的空区,3)隧道衬砌的密实程度,4)施工时坍方位置及坍方的处理情况。5)有时还可检测围岩中地下水向隧道侵入的位置。4.1 工作方法
地表雷达检测技术 方案 贵州道兴建设工程检测有限责任公司 贵阳市轨道交通2号线兴筑西路站-水井坡站区间
地表雷达探测技术方案 方案编制: 技术审核: 方案批准: 贵州道兴建设工程建设工程检测有限责任公司 3月15日 目录 1 工程概况 ........................................................................... 错误!未定义书签。 2 探测项目和方法................................................................ 错误!未定义书签。 3 编制依据 ........................................................................... 错误!未定义书签。 4 雷达探测的基本原理........................................................ 错误!未定义书签。
5 探测流程 ........................................................................... 错误!未定义书签。 6 检测仪器和设备................................................................ 错误!未定义书签。 7 需有关单位配合的事项.................................................... 错误!未定义书签。 7 质量和安全保证措施........................................................ 错误!未定义书签。 8 预期成果 ........................................................................... 错误!未定义书签。 9 本工程项目安排................................................................ 错误!未定义书签。
此文档下载后即可编辑 随机数字信号处理期末大作业(报告) 基于卡尔曼滤波器的雷达目标跟踪 Radar target tracking based on Kalman filter 学院(系):创新实验学院 专业:信息与通信工程 学生姓名:李润顺 学号:21424011 任课教师:殷福亮 完成日期:2015年7月14日
大连理工大学Dalian University of Technology
摘要 雷达目标跟踪环节的性能直接决定雷达系统的安全效能。由于卡尔曼滤波器在状态估计与预测方面具有强大的性能,因此在目标跟踪领域有广泛应用,同时也是是现阶段雷达中最常用的跟踪算法。本文先介绍了雷达目标跟踪的应用背景以及研究现状,然后在介绍卡尔曼滤波算法和分析卡尔曼滤波器性能的基础上,将其应用于雷达目标跟踪,雷达在搜索到目标并记录目标的位置数据,对测量到的目标位置数据(称为点迹)进行处理,自动形成航迹,并对目标在下一时刻的位置进行预测。最后对在一个假设的情境给出基于卡尔曼滤波的雷达目标跟踪算法对单个目标航迹进行预测的MATLAB仿真,对实验的效果进行评估,分析预测误差。 关键词:卡尔曼滤波器;雷达目标跟踪;航迹预测;预测误差;MATLAB 仿真 - 1 -
1 引言 1.1 研究背景及意义 雷达目标跟踪是整个雷达系统中一个非常关键的环节。跟踪的任务是通过相关和滤波处理建立目标的运动轨迹。雷达系统根据在建立目标轨迹过程中对目标运动状态所作的估计和预测,评估船舶航行的安全态势和机动试操船的安全效果。因此,雷达跟踪环节工作性能的优劣直接影响到雷达系统的安全效能[1]。 鉴于目标跟踪在增进雷达效能中的重要作用,各国在军用和民用等领域中一直非常重视发展这一雷达技术。机动目标跟踪理论有了很大的发展,尤其是在跟踪算法的研究上,理论更是日趋成熟。在跟踪算法中,主要有线性自回归滤波、两点外推滤波、维纳滤波、加权最小二乘滤波、β α-滤波和卡尔曼滤波,其中卡尔曼滤波算法在目标跟踪理论中占据了主导地位。
隧道衬砌质量地质雷达无损检测技术 1 前言 工艺概况 铁路隧道衬砌是隐蔽工程,用传统的目测或钻孔对其质量进行检测有较大的局限性;应用物理勘探的方法对隧道衬砌混凝土进行无损检测,可取得快速、安全、可靠的效果。 工艺原理 电磁反射波法(地质雷达)由主机、天线和配套软件等几部分组成。根据电磁波在有耗介质中的传播特性,当发射天线向被测介质发射高频脉冲电磁波时,电磁波遇到不均匀体(接口)时会反射一部分电磁波,其反射系数主要取决于被测介质的介电常数,雷达主机通过对此部分的反射波进行适时接收和处理,达到探测识别目标物体的目的(图1)。 图1 地质雷达基本原理示意图 电磁波在特定介质中的传播速度是不变的 ,因此根据地质雷达记录的电磁波传播时间ΔT ,即可据下式算出异常介质的埋藏深度H : H V T =??2 (1) 式中,V 是电磁波在介质中的传播速度,其大小由下式表示: V C =ε (2) 式中,C 是电磁波在大气中的传播速度,约为×108m/s ; ε为相对介电常数,不同的介质其介电常数亦不同。 雷达波反射信号的振幅与反射系统成正比,在以位移电流为主的低损耗介质中,反射系数可表示为: 212 1εεεε+-=r (3)
反射信号的强度主要取决于上、下层介质的电性差异,电性差越大,反射信号越强。 雷达波的穿透深度主要取决于地下介质的电性和波的频率。电导率越高,穿透深度越小;频率越高,穿透深度越小。 2 工艺特点 电磁反射波法(地质雷达)能够预测隧道施工中衬砌的各种质量问题,分辨率高,精度高,探测深度一般在~左右。利用高频电磁脉冲波的反射,中心工作频率 400MHz/900 MHz/1500 MHz; 采用宽带短脉冲和高采样率,分辨率较高; 采用可调程序高次迭加和多波处理等信号恢复技术,大大改善了信噪比和图像显示性能。 (1)操作简单,对工作环境要求不高; (2)对衬砌隐蔽工程质量问题性质判断一般精度较高,分辨率可达到2~5cm,检测的深度、结构尺寸以及里程偏差或误差小于10%,缺陷类型识别准确度达95%以上; (3)通过专业的RADAN 分析软件,专业的技术人员可以迅速的完成数据处理等。 3 适用范围 地质雷达有其适用范围和适用条件,目标体与周围介质是否存在足够的电性差异,是探测工作是否有效的前提,这种电性差异就是介电常数;应根据不同的检测对象和检测要求选用不同的天线类型;适用条件,探测的目标体与周围介质有较大的介电常数差异并具有较好的反射条件;上覆层导电性较弱;目标体具有一定的体积,引起的异常有一定的强度;具有一定的探测对比资料。 该技术适用于隧道衬砌质量施工过程控制和竣工验收的无损检测。 4 主要引用标准 《高速铁路隧道工程施工质量验收标准》(TB 10753-2010) 《铁路隧道工程施工质量验收标准》TBl0417-2003 《铁路隧道衬砌质量无损检测规程施工规范》(TB10223-2004) 《铁路工程物理勘探规程》(TB10013-2004) 《岩土工程勘察规范》(GB50021-2001)
地质雷达在隧道超前地质预报中的应用 摘要:本文简要介绍了地质雷达基本原理及其探测深度、精度,并结合实例阐述了地质雷达的工程应用。 关键词:地质雷达;隧道超前地质预报;掌子面 引言 目前,我国修建大量穿越山岭的特长隧道。由于这些隧道大都处于地下各种复杂的水文地质、工程地质岩体中。为了摸清和预知周围的水文地质和工程地质条件,隧道地质超前预报显示出越来越重要的作用。在隧道开挖掘进过程中,提前发现隧道前方的地质变化,为施工提供较为准确的地质资料,及时调整施工工艺,减少和预防工程事故的发生非常重要。一、地质雷达基本原理及探测深度、精度 地质雷达( Ground Penetrating Radar, 简称GPR, 也称探地雷达) 是利用超高频(106Hz~109Hz)电磁脉冲波的反射探测地下目的体分布形态及特征的一种地球物理勘探方法。发射天线( T) 将信号送入地下,遇到地层界面或目的体反射后回到地面再由接收天线( R) 接收电磁波的反射信号,通过对电磁波反射信号的时域特征和振幅特征进行分析来了解地层或目的体特征(见图1)
图1 地质雷达反射探测原理图 根据波动理论,电磁波的波动方程为: P = │P│e-j(αx-αr)﹒e-βr(1)(1)式中第二个指数-βr是一个与时间无关的项,它表示电磁波在空间各点的场值随着离场源的距离增大而减小,β为吸收系数。式中第一个指数幂中αr表示电磁波传播时的相位项,α为相位系数,与电磁波传播速度V的关系为: V = ω/α(2)当电磁波的频率极高时,上式可简略为: V = c/ε1/2(3)式中c为电磁波在真空中的传播速度;ε为介质的相对介电常
地下管线探测报告 编写: 检测: 审核: 批准: ****有限公司 二〇一九年七月十八日
地下管线探测报告 一、任务概况 1.1作业目的 为满足****工程施工需要,****有限公司于****有限公司年7月07日对该项目地下综合管线进行物探工作。 1.2测区概况 项目位于****市****有限公司区,物探位置参如图1.1所示。 图1.1工程场地地理位置图 二、管线探测 探测范围为以委托方指定的范围为界。 2.1管线的调查 管线的调查主要针对架空管线及明显管线点(包括接线箱、变压箱、变压器、消防栓、人孔井、阀门、窨井、仪表井等附属设施)进行。 ①明显管线点的各种数据均应直接打开井,用检验合格的钢尺量测,精
确到厘米。实际作业时按规程及甲方提供表格所列各类管线调查内容,参考各专业部门提供的资料,到实地调查核实,查清各类被调查管线的类型、管径、材质、埋深、起止、走向以及同类管线的连接关系,以便进行仪器探测。在调查量取时首先认真仔细量读,确保调查成果的准确性。其次,管线调查时应注意量取各类管线的偏距,即管道中心线至井盖中心的水平偏移距。 ②在实地调查中应邀请管线权属单位的管线管理人员、管线的规划、设计、施工人员和当地居民等熟悉管线情况的人员协助。 2.2地下管线探测原理 金属管线探测采用电磁感应原理。地下金属管线在发射机发出的电磁场的激励下产生感应电流,该感应电流又在管线的周围产生二次感应磁场,通过接收机接收该二次磁场来确定地下管线的位置与深度。 发射机现场工作有三种方式:第一种采用偶极电磁感应法,探测时将发射机的发射线圈垂直地放在地表,或水平放置于管线的正上方;第二种是采用直接感应法,探测时用夹钳夹住管线,发射机通过夹钳直接激发管线;第三种是采用充电法,直接将发射机的一极接在管线的一端,另一极接在待测管线的另一端或较远处的大地上,使发射电流直接流过被测管线。直接感应法和充电法应具备管线露头的条件,其中充电法只能用于给水、热力等管线外露且不带电的管线,多用于管线的追踪;偶极电磁感应法适用范围较广,既可应用于已知管线的追踪,也可以进行未知管线的普查。 接收机接收电磁场有两种方式:一种是采用垂直线圈接收,该接收方法在地下管线的正上方信号最大,离开管线信号逐渐减小,极大值点与半极大值点的水平距离x为管线中心线的埋深h,如图3.1所示。另一种是采用水平线圈接收,该接收方法在地下管线的正上方信号最小,在管线两侧各有一个
18.5 目标捕获和距离跟踪 距离跟踪就是连续测量从发射射频脉冲到目标回波信号返回之间的延时的过程。距离测量是雷达最精确的位置坐标测量。其典型数据是在测量几百英里距离时精密到几码以内。通常距离跟踪是从其他目标中鉴别出所需目标的主要方法,通过距离波门(即时间选通)从误差检波器输出中消除其他目标的回波(虽然也有用速度鉴别和角度鉴别的)。距离跟踪电路也可用来捕获所希望的目标。距离跟踪不仅必须测量脉冲从雷达到目标的往返行程时间,而且必须识别出反射信号是一目标而不是噪声,并且保存目标的距离随时间变化的历程。 这里的讨论适用于典型的脉冲跟踪雷达。距离测量也可以用使用调频连续波的连续波雷达来完成,这种调频连续波通常是一种线性调频波。目标距离由回波信号和发射信号之间的频率差异决定。考虑到多普勒效应的调频连续波系统的性能见参考资料1。 捕获 距离跟踪的第一个作用是捕获所需的目标。虽然这不是跟踪工作,但在典型的雷达里这是实现距离跟踪或角跟踪之前必需的第一步。对于窄波束跟踪雷达而言,为使天线波束指向目标的方向,必须具备有关目标角位置的某些信息。这个信息叫做引导数据,可以由搜索雷达或其他来源提供。引导数据可以足够精确地把窄波束指向目标或者可以要求跟踪器扫描一个较大的不确定区域。雷达距离跟踪的优点是能看到从近距离一直到雷达的最大距离上的所有目标。通常把这个距离分成小段,其中各段可以同时检验是否有目标存在。当需要波束扫描时,距离跟踪器可在短时间里(如0.1s)检验各段情况,即可作出关于目标是否存在的判断。如果没有目标存在,就让波束移向新的位置。这个过程对机械式跟踪而言是完全连续的,因为机械式跟踪移动波束相当慢,因此使得在对各段距离进行检验的短时间内目标仍然留在波束宽度之内。 与搜索雷达一样,目标捕获要考虑实现给定的检测概率和虚警概率所需的信噪比门限和积累时间[1]。然而,与搜索雷达相比,目标捕获可使用较高的虚警概率,这是因为操纵员知道目标是存在的,不存在在等待目标时由于虚警而使操纵员疲劳。最佳虚警概率的选择是以电路的性能为基础的,此电路可观察各距离间隔以判断哪一个间隔中有目标回波。 其典型的技术是使门限电压足够高,以防止大多数噪声尖峰超过门限,可是又要低得足以让弱信号通过。在各个发射脉冲之后即可观察所检验的距离间隔是否有信号超过了门限。积累时间允许雷达在判决是否有目标存在之前进行几次这种观察。噪声和目标之间的主要区别在于超过门限的噪声尖峰是随机的,但如果有目标存在,则当它超过门限时就比较有规律。一种典型的系统就可简单地计算在积累时间内超过门限的次数,并在超过的次数大于雷达发射次数的一半时,就指出是否有目标出现。若雷达脉冲重复频率是300 Hz,积累时间是0.1s,则在有一个强而稳定的目标时,雷达就能观察到30次超过门限。由于从弱目标来的回波加上噪声不一定总是超过门限,所以可以规定一个界限,如15次,在积累时间里,必须超过这一界限才判定有目标出现。对于非闪烁目标,预期的性能为:在信噪比为2.5dB时,发现概率是90%,虚警率是10-5。AN/FPS—16和AN/FPQ—6测量雷达均使用这些检测参数,每次捕获可使用10个邻接的波门,每个波门宽为1000yd。这10个波门覆盖了5n mile的距离间隔。
单脉冲雷达角度跟踪技术研究 【摘要】简单介绍了单脉冲雷达的特点及工作原理,重点分析了多部干扰机对单脉冲雷达的角度干扰问题,并对相干干扰和非相干干扰的干扰效果进行了讨论,指出两点源非相干干扰是实际工程中一种比较理想的干扰方式。 【关键词】单脉冲雷达、角度跟踪、相干干扰、非相干干扰 一、引言 对雷达进行干扰要对准雷达的四个系统:显示系统、距离跟踪系统、速度跟踪系统和角度跟踪系统。在雷达发展的早期,只要对前三个系统中的一个(或两个)系统进行有效地干扰,就可达到破坏雷达角跟踪系统正常工作的目的。现在随着新体制雷达的出现和抗干扰技术的不断提高,尤其是单脉冲雷达体制的出现,使很多干扰技术难以奏效。本文以振幅和差式单脉冲雷达为例,讨论了用多部干扰机对单脉冲雷达实施干扰的情况。 二、分析 1.单脉冲雷达 ◆定义 单脉冲雷达是指由单个回波脉冲即可获得目标空间角信息的雷达。 ◆特点 单脉冲雷达是一种精密跟踪雷达。它有较高的测角精度、分辨率和数据率,但设备比较复杂。单脉冲雷达早在60年代就已广泛应用。美国、英国、法国和日本等国军队大量装备单脉冲雷达,主要用于目标识别、靶场精密跟踪测量、弹道导弹预警和跟踪、导弹再入弹道测量、火箭和卫星跟踪、武器火力控制、炮位侦察、地形跟随、导航、地图测绘等;在民用上主要用于中交通管制。目前使用的单脉冲雷达基本上都实现了模块化、系列化和通用化,具有多目标跟踪、动目标显示、故障自检、维修方便等特点。 ◆分类 根据从回波中获取角信息的方式(测角法)不同,单脉冲雷达可分为振幅法(比幅)、相位法(比相)和综合法(振幅相位)3种。这3种测角法又可用3种角度鉴
别器(振幅式、相位式、和差式)中的任何一种来获得目标的角度信息,因此综合起来有9种形式的单脉冲雷达系统,其中以振幅和差式单脉冲雷达系统用的最多。通常分为有振幅比较单脉冲雷达和相位比较单脉冲雷达两大类。 工作原理 单脉冲雷达每发射一个脉冲,天线能同时形成若干个波束,将各波束回波信号的振幅和相位进行比较,当目标位于天线轴线上时,各波束回波信号的振幅和相位相等,信号差为零;当目标不在天线轴线上时,各波束回波信号的振幅和相位不等,产生信号差,驱动天线转向目标直至天线轴线对准目标,这样便可测出目标的高低角和方位角,从各波束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。它具有圆锥扫描雷达所没有的优点:获得角误差信息的时间短(以微秒计算);不受回波振幅起伏变化的影响;测角精度高(0.1~0.5mil);测角支路抗幅度调制干扰(如回答式倒相干扰)的能力强。振幅和差式单脉冲雷达系统的基本工作原理:将两个比幅天线方向图所得的幅度不同的信号经过和差变换器之后,再把和信号(U∑ )、差信号(U△ )加到鉴相器得出差信号。 2 雷达角跟踪技术 2.1 信号处理和测量技术 PD采用一种合适的且可以适当改变的配置方式及数据处理算法,可成功的实现跟踪低仰角目标。假定一种处理算法,地面的反射系数应有一个确定的模型(如镜面反射和几何光学原理),重要的是要估计这样的算法偏离假定的反射模型的灵敏度如何。在一个真实系统中,这样的偏差肯定会发生。即使是光滑的镜面表面(理想的镜面反射),当雷达位于几倍天线直径大的该表面时,由物理光学原理即菲涅尔区,也需要校正。关键的问题是,在反射的雷达信号中有多少是未知量,要确定这些未知量,雷达需要测量的量是多少,很明显,在多路径效应下,未知数的数量会增加。雷达必须做更多的测量才能获得反射平面的信息以鉴别目标的真实仰角。但是更多的工作是需要找到最优的算法,需要确定它们对不同反射系数模型的灵敏度。
第二讲国内外地质雷达技术发展状况(历史与现状) 探地雷达的历史最早可追溯到20世纪初,1904年,德国人Hulsmeyer首次将电磁波信号应用与地下金属体的探测。1910年Leimback和Lowy以专利形式在1910年的专利,他们用埋设在一组钻孔里的偶极子天线探测地下相对高的导电性质的区域,并正式提出了探地雷达的概念。1926年Hulsenbeck第一个提出应用脉冲技术确定地下结构的思路,指出只要介电常数发生变化就会在交界面会产生电磁波反射,而且该方法易于实现,优于地震方法[1,2]。但由于地下介质具有比空气强得多的电磁衰减特性,加之地下介质情况的多样性,电磁波在地下的传播比空气中复杂的多,使得探地雷达技术和应用受到了很多的限制,初期的探测仅限于对波吸收很弱的冰层厚度(1951,B.O.Steenson,1963,S.Evans)和岩石和煤矿的调查(J.C.Cook)等。随着电子技术的发展,直到70探地雷达技术才重新得到人们的重视,同时美国阿波罗月球表面探测实验的需要,更加速了对探地雷达技术的发展,其发展过程大体可分为三个阶段: 第一阶段,称为试验阶段,从20世纪70年代初期到70年代中期,在此期间美国,日本、加拿大等国都在大力研究,英国、德国也相继发表了论文和研究报告,首家生产和销售商用GPR的公司问世,即Rex Morey和Art Drake成立的美国地球物理测量系统公司(GSSI),日本电器设备大学也研制出小功率的基带脉冲雷达系统。此期间探地雷达的进展主要表现在,人们对地表附近偶极天线的辐射场以及电磁波与各种地质材料相互作用的关系有了深刻的认识,但这些设备的探测精度、地下杂乱回波中目标体的识别、分别率等方面依然存在许多问题。 第二阶段,也称为实用化阶段,从20世纪70年代中后其到80年代,在次期间技术不段发展,美国、日本、加拿大等国相继推出定型的探地雷达系统,在国际市场,主要有美国的地球物理探测设备公司(GSSI)的SIR系统,日本应用地质株式社会(OYO)的YL-R2地质雷达,英国的煤气公司的GP管道公司雷达,在70年代末,加拿大A-Cube公司的Annan和Davis等人于1998年创建了探头及软件公司(SSI),针对SIR系统的局限性以及野外实际探测的具体要求,在系统结构和探测方式上做了重大的改进,大胆采用了微型计算机控制、数字信号处理以及光缆传输高新技术,发展成了EKKO Ground Penetrating Radar 系列产品,简称EKKO GPR系列。瑞典地质公司(SGAB)也生产出RAMAC 钻孔雷达系统,此外,英国ERA公司、SPPSCAN公司,意大利IDS公司、瑞典及丹麦也都在生产和研制各种不同型号的雷达。80年代全数字化的GPR问世,具有划时代的意义,数字化GPR不仅提供了大量数据存储的解决方案,增强了实时和现场数据处理的能力,为数据的深层次后处理带来方便,更重要的是GPR 因此显露出更大的潜力,应用领域得以向纵身拓展。 第三阶段,从上个世纪80年代至今,可称为完善和提高阶段。在此期间,GPR技术突飞猛进,更多的国家开始关注探地雷达技术,出现了很多探地雷达的研究机构,如荷兰的应用科学研究组织和代尔夫大学,法国_德国的Saint-Louis 研究所(ISL),英国的DERA,瑞典的FOA,娜威科技大学和地质研究所,比利时的RMA,南非的开普敦大学,澳大利亚昆士兰大学,美国的林肯实验室和Lawrence Livermore国家实验室以及日本的一些研究机构等等。同时,探地雷达也得到了地球物理和电子工程界的更多关注,对天线的改进、信号的处理、地下目标的成像等方面提出了许多新的见解。GSSI公司在商业上取得了极大的成功,
雷达检测施工细则 为保证本项目部在本次雷达检测过程中能够及时准确地完成任务,我检测组特针对雷达检测施工工作做出以下细则,本细则自即日期开始实施,要求全部检测人员认真、严格执行。 一、前期准备工作 (一)雷达检测组技术负责人制定雷达检测工作进度表,下发全体技术人员,要求技术人员按此进度表制定详细工作计划,以便于雷达检测组能及时地向施工方提前发出雷达检测通知,便于施工单位提前做好雷达检测的必要准备工作,以保证施工单位调整施工进度,且利于我方及时、高效地完成雷达检测工作。(二)雷达检测组技术负责人要根据检测目的计算好仪器的参数设置,以保证能在现场采集到全面、高效的数据记录;布线方式可根据掌子面地质情况及施工条件,现场设计合理的采集测线。 (三)雷达检测组技术负责人在出发前进行仪器的全面检查,避免由人为因素造成工地采集过程中出现采集中断。 二、现场采集工作 (一)雷达采集过程中要求有至少两名专业技术人员在场,以保证仪器操作、天线布设及仪器采集过程中的维护工作,同时在采集过程中要做好仪器的保护工作,防止人为或落石等造成仪器的损坏情况发生。 (二)雷达检测数据采集现场保证至少一人为专业地质描述人员,按要求做好掌子面及周边围岩的描述。 三、雷达检测组描述人员管理 (一)雷达检测组描述人员做好现场记录,为能准确记录现场地质情况,要求描述人员带必要的工具(地质锤、罗盘、放大镜、皮尺、花杆)。 (二)描述人员要对周边围岩进行详细的描述,对于大于25cm的裂隙或节理一定要进行详细描述(包括长度、走向、宽度、数量),对其可能的延伸方向要进行三维推断描述。要求描述信息准确,有效,并在野外做出描述草图,以备后期的资料整理与存档。 (三)雷达检测描述人员要对记录进行全面记载,包括: 1、断面号,要求为简单易记,能反映断面所处隧道的准确位置。 2、里程号,要求精确到0.1m (如XX检测的位置为K66+000.3)。 3、面积,要求有整体的把握,并对其做出准备合理的描述,包括影响深度、范围、影响消失边界。 (四)雷达检测描述人员也要准确记录已支护拱顶及周边变形及渗水情况,做好野外描述,要求描述语言要严格按规范中语言对地质情况进行客观描述,对有疑义处必须进行必要的咨询,对确难定义处要求争取多人意见,最终得出结论,并做好记录。 (五)雷达检测采集人员在现场采集过程中要及时做好雷达记录与现场地质情况的对比,以便于为后期的资料处理过程中提供参考。 (六)雷达检测采集人员要做好现场的班报记录(包括检测位置、文件名、仪器
31 自动跟踪 本章介绍了跟踪检测目标的技术。使用雷达硬件和雷达信号处理实现跟踪,从而形成一个闭环系统。单目标跟踪(STT)和边跟踪边扫描(TWS)模式(在第2章中介绍)被检验。在我们考虑跟踪测量和方法之前,我们需要定义一些术语。 估计,准确性和精确度通常用于描述跟踪的不同方面。估算应用于任何参数的值,该参数的值(1)仅在与腐蚀干扰相结合时才能测量,例如热噪声(图31-1);(2)不能直接测量,例如基于一系列距离测量的距离速率。 根据该定义,雷达系统测量或计算的每个参数,无论多么精确,都是估计值。 接下来,区分两个重要参数:准确度和精度。通常,两者都指数量的测量,其在跟踪中包括目标参数,例如真实范围,速度和方位。因此,测量值表示雷达系统对目标的真实参数的估计。 准确度表示测量值与真实值的接近程度,而精度表示在同一参数的多个测量值中存在多少可变性。它们共同构成了雷达系统对真实目标参数进行估算的基础。图31-2显示了一个示例,其中准确度和精度可以看作非常不同并且(有时)彼此独立。跟踪雷达的目标是具有高准确度和高精度。
跟踪中使用的另一个术语是判别式,其量化测量函数的校准。它通常由执行测量的硬件或软件输出与跟踪误差的真实值的关系图表示(图31-3)。曲线的线性部分的斜率是判别式并且确定测量的灵敏度。通常,斜率随着信噪比的增加而增加。 判别式的一个重要特征是它们通常是归一化的,因此无量纲。因此,不一定需要精确测量电压或功率电平。此外,除了信噪比的影响之外,跟踪误差的测量值不随信号强度而变化。它们与目标的大小,范围,机动和雷达截面(RCS)波动无关。如果需要,可以通过将判别式乘以预先计算的常数来给出判别式。在整个跟踪过程中使用判别式,其目的是改进目标测量参数的估计,例如距离,多普勒,仰角和方位角。 31.1 单目标跟踪 单目标跟踪可提供有关目标位置,速度和加速度的连续且准确的当
. . . . 隧道衬砌质量地质雷达无损检测技术 1 前言 1.1工艺概况 铁路隧道衬砌是隐蔽工程,用传统的目测或钻孔对其质量进行检测有较大的局限性;应用物理勘探的方法对隧道衬砌混凝土进行无损检测,可取得快速、安全、可靠的效果。 1.2工艺原理 电磁反射波法(地质雷达)由主机、天线和配套软件等几部分组成。根据电磁波在有耗介质中的传播特性,当发射天线向被测介质发射高频脉冲电磁波时,电磁波遇到不均匀体(接口)时会反射一部分电磁波,其反射系数主要取决于被测介质的介电常数,雷达主机通过对此部分的反射波进行适时接收和处理,达到探测识别目标物体的目的(图1)。 图1 地质雷达基本原理示意图 电磁波在特定介质中的传播速度是不变的,因此根据地质雷达记录的电磁波传播时间ΔT,即可据下式算出异常介质的埋藏深度H: H V T =??2(1)
式中,V 是电磁波在介质中的传播速度,其大小由下式表示: V C =ε (2) 式中,C 是电磁波在大气中的传播速度,约为3.0×108m/s ; ε为相对介电常数,不同的介质其介电常数亦不同。 雷达波反射信号的振幅与反射系统成正比,在以位移电流为主的低损耗介质中,反射系数可表示为: 212 1εεεε+-=r (3) 反射信号的强度主要取决于上、下层介质的电性差异,电性差越大,反射信号越强。 雷达波的穿透深度主要取决于地下介质的电性和波的频率。电导率越高,穿透深度越小;频率越高,穿透深度越小。 2 工艺特点 电磁反射波法(地质雷达)能够预测隧道施工中衬砌的各种质量问题,分辨率高,精度高,探测深度一般在0.5m ~2.0m 左右。利用高频电磁脉冲波的反射,中心工作频率400MHz/900 MHz/1500 MHz ; 采用宽带短脉冲和高采样率,分辨率较高; 采用可调程序高次迭加和多波处理等信号恢复技术,大大改善了信噪比和图像显示性能。 (1)操作简单,对工作环境要求不高; (2)对衬砌隐蔽工程质量问题性质判断一般精度较高,分辨率可达到2~5cm ,检测的深度、结构尺寸以及里程偏差或误差小于10%,缺陷类型识别准确度达95%以上; (3)通过专业的RADAN 6.0分析软件,专业的技术人员可以迅速的完成数据处理等。 3 适用范围 地质雷达有其适用范围和适用条件,目标体与周围介质是否存在足够的电性
密级: 合同编号:科研(2005-7)号中铁二十四局福建铁路建设有限公司科研 项目合同 项目名称:应用地质雷达法检测混凝土结构物强度及缺陷位置 的试验研究 负责单位:福州铁建工程质量检测有限公司 课题负责人:王兴照 起止年限:2005年1月至2005年12月 中铁二十四局集团福建铁路建设有限公司 2005年9月10日
一、项目简要说明: 通过本项目研究,找出相对介电常数(ε)和电磁波的传播时间(ΔT)与混凝土强度(R)的相关关系,利用不同介质的物性差异所引起波的反射来判定被测目标情况,进行混凝土强度及缺陷位置的判定。 二、主要研究内容及技术关键: 1、找出相对介电常数(ε)和电磁波的传播时间(ΔT)与混凝土强度(R)的相关关系; 2、找出相对介电常数(ε)和电磁波的传播时间(ΔT)与混凝土缺陷位置(H)之间的相关关系,即H=f(ε,ΔT); 3、混凝土结构物缺陷的定性判识。 三、达到的目标、技术经济指标和成果形成: 1、通过本项目研究,研究在一般测试环境中,地质雷达法测评混凝土强度等级范围的方法。 2、通过本项目研究,研究在不同条件下,寻找相对介电常数ε和电磁波的传播时间ΔT 及缺陷厚度H之间的关系规律。 3、通过模拟试验,研究不同预埋物及缺陷在地质雷达图像中判识。 4、形成《地质雷达检测混凝土结构物作业指导书》一份(用于指导操作人员),编制《地质雷达检测混凝土结构物方法介绍》一份(用于科普介绍和技术交流)。 成立QC小组,组织技术攻关,形成地质雷达检测混凝土结构物的攻关QC成果一份,参加公司QC成果发布。总结形成科技论文一篇。 四、采用的研究和试验方法:
第1题 由于松散体部充填不同性状的土体排列无规律,因此松散体部在雷达图像上表现为杂乱的,随深度的增加,电磁波逐渐 A.强反射波,增大 B.强反射波,衰减 C.弱反射波,增大 D.弱反射波,衰减 答案:B 您的答案:B 题目分数:5 此题得分:5.0 批注: 第2题 空洞部会形成明显的多次反射波组,形态大致为一倒悬() A.双曲线 B.抛物线 C.折线 D.圆曲线 答案:A 您的答案:D 题目分数:5 此题得分:0.0 批注: 第3题 数据处理的一般流程为: 原始数据的编辑- > 滤波- >设定时间零点- >频谱分析- >()- >属性分析、剖面叠加等- >增益- >速度求取- >高程修正- >剖面输出 A.增益 B.滤波 C.去噪 D.时窗选取 答案:B 您的答案:B 题目分数:5 此题得分:5.0 批注: 第4题 反射系数的大小主要取决于反射界面两侧介质介电常数的差异, 差
异越大反射信号(), 反之反射信号() A.越强,越差 B.越强,越好 C.越弱,越差 D.越弱,越好 答案:A 您的答案:A 题目分数:5 此题得分:5.0 批注: 第5题 地质雷达法是一种采用()电磁波信号检测地下介质分布的方法 A.宽脉冲宽带高频 B.窄脉冲宽带高频 C.宽脉冲宽带低频 D.窄脉冲宽带低频 答案:B 您的答案:B 题目分数:5 此题得分:5.0 批注: 第6题 遇到不同的介质或介质中裂隙或孔隙发育程度不同时, 电磁波的反射系数、衰减系数、以及()是不一样的 A.传播速度 B.旅行时间 C.反射波频率 D.反射波振幅 答案:C 您的答案:D 题目分数:5 此题得分:0.0 批注: 第7题 现阶段,地质雷达探测技术可以检测道路路面以下()米围的空洞、疏松等路基缺陷,确定道路缺陷的位置、大小及埋深 A.4 B.5
18.5 目标捕获和距离跟踪 距离跟踪就是连续测量从发射射频脉冲到目标回波信号返回之间的延时的过程。距离测量是雷达最精确的位置坐标测量。其典型数据是在测量几百英里距离时精密到几码以内。通常距离跟踪是从其他目标中鉴别出所需目标的主要方法,通过距离波门(即时间选通)从误差检波器输出中消除其他目标的回波(虽然也有用速度鉴别和角度鉴别的)。距离跟踪电路也可用来捕获所希望的目标。距离跟踪不仅必须测量脉冲从雷达到目标的往返行程时间,而且必须识别出反射信号是一目标而不是噪声,并且保存目标的距离随时间变化的历程。 这里的讨论适用于典型的脉冲跟踪雷达。距离测量也可以用使用调频连续波的连续波雷达来完成,这种调频连续波通常是一种线性调频波。目标距离由回波信号和发射信号之间的频率差异决定。考虑到多普勒效应的调频连续波系统的性能见参考资料1。 捕获 距离跟踪的第一个作用是捕获所需的目标。虽然这不是跟踪工作,但在典型的雷达里这是实现距离跟踪或角跟踪之前必需的第一步。对于窄波束跟踪雷达而言,为使天线波束指向目标的方向,必须具备有关目标角位置的某些信息。这个信息叫做引导数据,可以由搜索雷达或其他来源提供。引导数据可以足够精确地把窄波束指向目标或者可以要求跟踪器扫描一个较大的不确定区域。雷达距离跟踪的优点是能看到从近距离一直到雷达的最大距离上的所有目标。通常把这个距离分成小段,其中各段可以同时检验是否有目标存在。当需要波束扫描时,距离跟踪器可在短时间里(如0.1s)检验各段情况,即可作出关于目标是否存在的判断。如果没有目标存在,就让波束移向新的位置。这个过程对机械式跟踪而言是完全连续的,因为机械式跟踪移动波束相当慢,因此使得在对各段距离进行检验的短时间内目标仍然留在波束宽度之内。 与搜索雷达一样,目标捕获要考虑实现给定的检测概率和虚警概率所需的信噪比门限和积累时间[1]。然而,与搜索雷达相比,目标捕获可使用较高的虚警概率,这是因为操纵员知道目标是存在的,不存在在等待目标时由于虚警而使操纵员疲劳。最佳虚警概率的选择是以电路的性能为基础的,此电路可观察各距离间隔以判断哪一个间隔中有目标回波。 其典型的技术是使门限电压足够高,以防止大多数噪声尖峰超过门限,可是又要低得足以让弱信号通过。在各个发射脉冲之后即可观察所检验的距离间隔是否有信号超过了门限。积累时间允许雷达在判决是否有目标存在之前进行几次这种观察。噪声和目标之间的主要区别在于超过门限的噪声尖峰是随机的,但如果有目标存在,则当它超过门限时就比较有规律。一种典型的系统就可简单地计算在积累时间内超过门限的次数,并在超过的次数大于雷达发射次数的一半时,就指出是否有目标出现。若雷达脉冲重复频率是300 Hz,积累时间是0.1s,则在有一个强而稳定的目标时,雷达就能观察到30次超过门限。由于从弱目标来的回波加上噪声不一定总是超过门限,所以可以规定一个界限,如15次,在积累时间里,必须超过这一界限才判定有目标出现。对于非闪烁目标,预期的性能为:在信噪比为2.5dB时,发现概率是90%,虚警率是10-5。AN/FPS—16和AN/FPQ—6测量雷达均使用这些检测参数,每次捕获可使用10个邻接的波门,每个波门宽为1000yd。这10个波门覆盖了5n mile的距离间隔。
第1题 由于松散体内部充填不同性状的土体排列无规律,因此松散体内部在雷达图像上表现为杂乱的,随深度的增加,电磁波逐渐 A.强反射波,增大 B.强反射波,衰减 C.弱反射波,增大 D.弱反射波,衰减 答案:B 您的答案:B 题目分数:5 此题得分:5.0 批注: 第2题 空洞内部会形成明显的多次反射波组,形态大致为一倒悬() A.双曲线 B.抛物线 C.折线 D.圆曲线 答案:A 您的答案:A 题目分数:5 此题得分:5.0 批注: 第3题 数据处理的一般流程为: 原始数据的编辑- > 滤波- >设定时间零点- >频谱分析- >()- >属性分析、剖面叠加等- >增益- >速度求取- >高程修正- >剖面输出 A.增益 B.滤波 C.去噪 D.时窗选取 答案:B 您的答案:B 题目分数:5 此题得分:5.0 批注: 第4题 反射系数的大小主要取决于反射界面两侧介质介电常数的差异, 差
异越大反射信号(), 反之反射信号() A.越强,越差 B.越强,越好 C.越弱,越差 D.越弱,越好 答案:A 您的答案:A 题目分数:5 此题得分:5.0 批注: 第5题 地质雷达法是一种采用()电磁波信号检测地下介质分布的方法 A.宽脉冲宽带高频 B.窄脉冲宽带高频 C.宽脉冲宽带低频 D.窄脉冲宽带低频 答案:B 您的答案:B 题目分数:5 此题得分:5.0 批注: 第6题 遇到不同的介质或介质中裂隙或孔隙发育程度不同时, 电磁波的反射系数、衰减系数、以及()是不一样的 A.传播速度 B.旅行时间 C.反射波频率 D.反射波振幅 答案:C 您的答案:C 题目分数:5 此题得分:5.0 批注: 第7题 现阶段,地质雷达探测技术可以检测道路路面以下()米范围内的空洞、疏松等路基缺陷,确定道路缺陷的位置、大小及埋深 A.4 B.5
隧道衬砌质量地质雷达无损检测技术 1 前言 1.1工艺概况 铁路隧道衬砌是隐蔽工程,用传统的目测或钻孔对其质量进行检测有较大的局限性;应用物理勘探的方法对隧道衬砌混凝土进行无损检测,可取得快速、安全、可靠的效果。 1.2工艺原理 电磁反射波法(地质雷达)由主机、天线和配套软件等几部分组成。根据电磁波在有耗介质中的传播特性,当发射天线向被测介质发射高频脉冲电磁波时,电磁波遇到不均匀体(接口)时会反射一部分电磁波,其反射系数主要取决于被测介质的介电常数,雷达主机通过对此部分的反射波进行适时接收和处理,达到探测识别目标物体的目的(图 1)。 图1 地质雷达基本原理示意图 电磁波在特定介质中的传播速度是不变的 ,因此根据地质雷达记录的电磁波传播时间ΔT ,即可据下式算出异常介质的埋藏深度H : H V T =??2 (1) 式中,V 是电磁波在介质中的传播速度,其大小由下式表示: V C =ε (2) 式中,C 是电磁波在大气中的传播速度,约为3.0×108m/s ; ε为相对介电常数,不同的介质其介电常数亦不同。 雷达波反射信号的振幅与反射系统成正比,在以位移电流为主的低损耗介质中,反射系数可表示为: 212 1εεεε+-=r (3) 反射信号的强度主要取决于上、下层介质的电性差异,电性差越大,反射信号越强。 雷达波的穿透深度主要取决于地下介质的电性和波的频率。电导率越高,穿透深度
越小;频率越高,穿透深度越小。 2 工艺特点 电磁反射波法(地质雷达)能够预测隧道施工中衬砌的各种质量问题,分辨率高,精度高,探测深度一般在0.5m~2.0m左右。利用高频电磁脉冲波的反射,中心工作频率400MHz/900 MHz/1500 MHz; 采用宽带短脉冲和高采样率,分辨率较高; 采用可调程序高次迭加和多波处理等信号恢复技术,大大改善了信噪比和图像显示性能。 (1)操作简单,对工作环境要求不高; (2)对衬砌隐蔽工程质量问题性质判断一般精度较高,分辨率可达到2~5cm,检测的深度、结构尺寸以及里程偏差或误差小于10%,缺陷类型识别准确度达95%以上; (3)通过专业的RADAN 6.0分析软件,专业的技术人员可以迅速的完成数据处理等。 3 适用范围 地质雷达有其适用范围和适用条件,目标体与周围介质是否存在足够的电性差异,是探测工作是否有效的前提,这种电性差异就是介电常数;应根据不同的检测对象和检测要求选用不同的天线类型;适用条件,探测的目标体与周围介质有较大的介电常数差异并具有较好的反射条件;上覆层导电性较弱;目标体具有一定的体积,引起的异常有一定的强度;具有一定的探测对比资料。 该技术适用于隧道衬砌质量施工过程控制和竣工验收的无损检测。 4 主要引用标准 《高速铁路隧道工程施工质量验收标准》(TB 10753-2010) 《铁路隧道工程施工质量验收标准》TBl0417-2003 《铁路隧道衬砌质量无损检测规程施工规范》(TB10223-2004) 《铁路工程物理勘探规程》(TB10013-2004) 《岩土工程勘察规范》(GB50021-2001) 《云桂铁路石林隧道地质雷达无损检测实施细则》 云桂铁路石林隧道相关设计图纸以及相关施工资料。 5 施工方法 1、检测前的准备工作: 收集隧道工程地质资料、施工图、设计变更资料和施工记录;