ovation常用算法
- 格式:doc
- 大小:235.50 KB
- 文档页数:12
Ovation系统单点温度保护算法分析及验证摘要:本文对Ovation DCS(Distributed Control System,集散控制系统)中的温度保护算法TEMPHIGH的内部逻辑进行了理论分析,发现在温度保护设定值低于环境温度时,保护信号无法触发,算法功能失效。
文章依据现场实际控制要求,通过逻辑组态仿真试验验证了理论分析和仿真结果的一致性,提出了在准确使用该算法时应注意的问题。
关键词:Ovation;温度保护算法;组态;仿真试验1引言工业控制过程中,低温测量传感器主要采用热电阻,逻辑保护一般通过冗余测点的“与”或者“2/3逻辑”判断从而提高连锁保护的可靠性。
实际工程中由于各种原因,无法对同一个参数安装多个测点,只能通过单点进行保护,如某燃煤机组其风扇磨配套液力耦合器,支撑和推力轴承温度共9点,均是单点启动跳闸。
12Ovation中带速率限制的温度保护算法TEMPHIGH2.1算法的内部逻辑该算法是一个“宏”,即DCS厂家根据最基本的功能块搭建出来的一个“程序段”,组态时当作一个标准功能块来使用。
其内部逻辑如图1所示。
1图1 TEMPHIGH算法内部逻辑12.2算法说明2.2.1温度保护回路:当温度点品质不坏,且变化率在允许范围内时(上升速率不超过限值,一般为3~5℃/S,下降无速率限制),温度保护算法正常工作。
此时温度超过保护限值经延时后保护动作,输出为1。
信号流程:IN→高限监视HIGHMON→延时TDON→第一个AND→OUT为1。
2.2.2静态闭锁及报警回路:当温度测点品质坏时,温度保护输出自动禁止,并通过ALM发出报警信号(注:需要时可接至光字牌报警),直至测点品质恢复后重新进行逻辑判断。
闭锁流程:IN→品质判断QUAL(此时因BAD置1)→或门OR→RS触发器置位→取反NOT→第一个AND→OUT为0。
本算法品质判断检查的项目是:BAD、FAIR、NOT GOOD、GOOD,当传感器故障(备注:可能超上、下限量程)时BAD置位。
OV ATION系统中的一些常用命令和用法1.在线查询命令:man xxx2.修改文件或目录的读、写、执行的权限,chmod [-R] mode name……mode:r(4),w(2),x(1)用su进入超级用户:chmod 许可权数值文件名/目录名(如chmod 777 filename1,chmod 666 filename2)改变文件或目录群组拥有权:chgrp [-R] groupname name(name可为文件名或目录名) 如:chgrp level4 文件名(level4为组名)chown username name(username为用户级别,name可为文件名或目录名)3.压缩文件:compress filename、compressdir directory-nameuncompress、uncomoressdir4.重定向:cat file1>file2-将file 1的内容送到file 25.文件连接:in [-s]oldname newname(hard link) in [-s]oldname newname(Symblick link)6.移动或更改文件、目录名称mv file1 file2……将file1更改名为file2的文件mv file1 dir1……将file1移到目录dir1下7.文件字符串寻找:grep string file8.密码的修改:passwd user4(user1…)9.查看各站的IP地址:cd /etc,more hosts10.查看目录所占磁盘容量:du [-s]directory11.查看文件内容:cat ,morecat filename or more filename12.输出控制:command>file……将command执行的结果送到file中,如:ls –l > list 将“ls –l ”执行的结果,写入list文件中。
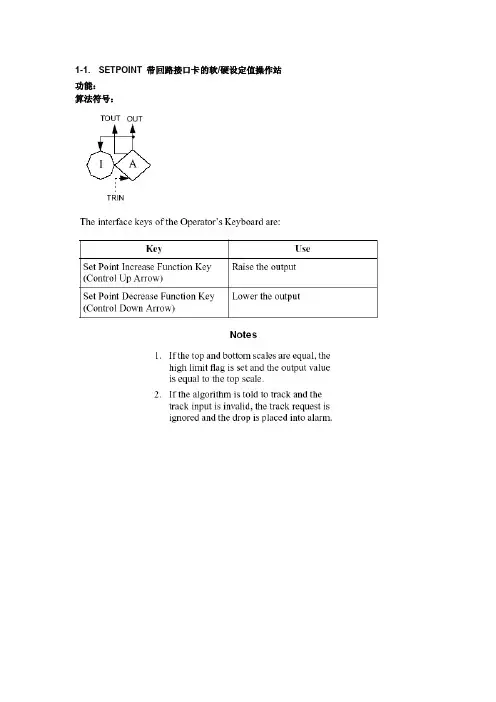
1-1. SETPOINT 带回路接口卡的软/硬设定值操作站功能:算法符号:1-2. MASTA TION (手动/自动操作站)功能:将一个基于CRT的软手动/自动操作站与一个可选的带有OV A TION回路接口模块卡结合到一起。
⏹算法符号:⏹工作方式:自动、手动、就地(Auto,Manual,Local)1-2-1.连接类型:⏹SOFT(软手操站),RLI 与回路接口卡相连带SLIM手操器(复位或上电时,读LI卡的值作为输出OUT),RVP与阀定位模块相连。
⏹自动模式:AUTOOUT = (IN1 x IN1 GAIN) + IN1 BIAS + BIAS BAR,当算法处在跟踪方式时,输出=跟踪输入,跟踪消失时,从跟踪输入回到OUT计算。
当升高禁止或降低禁止信号存在时,它会阻止输出跟踪跟踪输入值。
偏置BAR是在自动方式时有效加入MASTA TION的输出值,在手动方式时可修改但无效。
如果连接LI卡,则输出值写入LI卡。
⏹手动模式:ManualOUT=操作员在CRT上的手动改变输出,升/降禁止优先于手动键盘输出,而跟踪信号会使算法的输出=跟踪输入而不受升/降禁止信号的影响。
如果连接LI卡,则输出值写入LI卡,在本地模式下可通过SLIM改变输出值。
⏹本地模式:Local仅对选择LI卡和SLIM时有效。
在该模式下,由SLIM直接控制LI卡的输出。
MASTA TION读LI卡值且跟踪。
在这种跟踪方式下,控制器的所有定向命令(如……),对该算法均无效。
1-2-2.模式切换:MAMODE的数字抑制信号将拒绝将该算法从自动方式进入手动方式或者拒绝该算法从自动进入本地模式。
(当手动禁止性能打开时,MRE=1)通过CRT键切换(不在Local 方式下)在SLIM上切换。
如果连接LI卡,且硬件有错,算法会拒绝进入本地模式。
如果LI卡在本地模式时有一个SLIM通信错就会拒绝LI卡进入手动方式,而MASTA TION算法仍可进入手动方式。
仿真试验成为数字化仪控系统真正投入运行前原理样机、工程样机研制过程中非常重要的手段之一。
Ovatio n系统简介在核电站数字化仪控系统开发仿真试验中.采用的是西屋公司Ovation的最小配置系统。
这是一个可以扩展的快速以太网系统.其中的SUN Blade150工作站既作为工程师站,又作为操作员站,所有的控制组态都在SUN工作站上进行。
从而建立的最小配置核电站数字化仪控系统组成包括:I /O卡件、控制器、高速数据通信网络、系统服务器、操纵员控制台、工程师站、显示器、键盘、微机等。
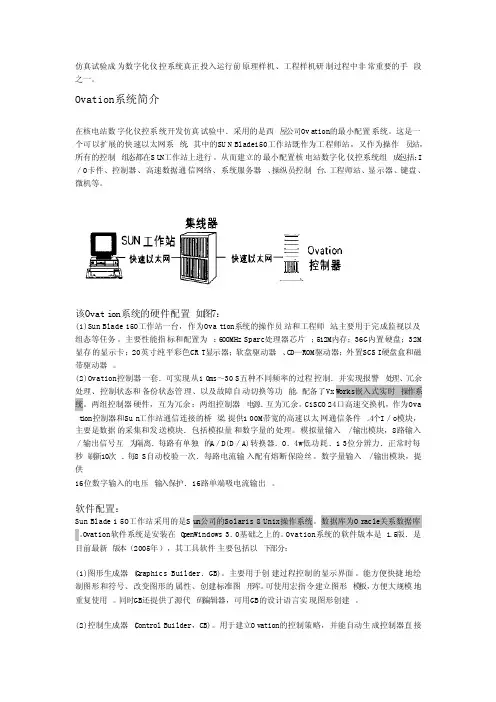
该Ovati on系统的硬件配置如图7:(1)Sun Blade15O工作站一台,作为Ovation系统的操作员站和工程师站,主要用于完成监视以及组态等任务。
主要性能指标和配置为:600MHz Sparc处理器芯片;512M内存;36G内置硬盘;32M 显存的显示卡;20英寸纯平彩色CRT显示器;软盘驱动器、CD—ROM驱动器;外置SCSI硬盘盒和磁带驱动器。
(2)Ovatio n控制器一套.可实现从10ms~30 S五种不同频率的过程控制.并实现报警处理、冗余处理、控制状态和备份状态管理、以及故障自动切换等功能。
配备了VxWorks嵌入式实时操作系统。
两组控制器硬件,互为冗余:两组控制器电源.互为冗余。
CiSCO24口高速交换机,作为Ova t ion控制器和Sun工作站通信连接的桥梁.提供1 00M带宽的高速以太网通信条件。
4个I/o模块,主要是数据的采集和发送模块.包括模拟量和数字量的处理。
模拟量输入/输出模块,8路输入/输出信号互为隔离.每路有单独的A/D(D/A)转换器.O.4w低功耗.1 3位分辨力.正常时每秒刷新10次.每8 S自动校验一次.每路电流输入配有熔断保险丝。

Ovation时序控制探讨摘要:介绍时序控制的应用及Ovation中时序设置的原则,通过现场除氧器液位控制试验中出现的问题,分析时序控制对逻辑功能的影响,提出解决时序问题的方案,并使用时序图对方案进行微观分析,现场测试解决方案并通过,得出正确的时序逻辑,以维持控制系统稳定。
关键词:时序;执行周期;脉冲带宽;逻辑组态前言某电厂一期工程共建设2台单机容量为1250MW的AP1000机组,电站主控制系统采用Emerson Ovation平台搭建,是全数字化仪控系统,这不同于传统的模拟系统,逻辑中存在的潜在错误或缺陷在特定触发条件下会引起错误的指令输出,造成系统功能失效,从而对核电站的安全稳定运行造成潜在严重影响。
对Ovation控制系统而言,时序控制的错误正属于这种潜在的错误,很难去发现,因此,有必要对Ovation控制系统中的时序控制作深入研究。
1.时序控制应用1.1时序控制介绍时序可理解为在DCS的一个执行周期内,完成一个控制循环,各个环节执行的顺序[1]。
执行周期由组态工程师配置,执行周期确定后,控制系统输入输出数据将在每个周期内更新一次,输入输出数据由每个逻辑块运算产生,而每个逻辑块之间按照特定的顺序依次执行,最终完成控制运算和信号输出。
可以认为DCS 中控制器的控制过程是串行完成的,即在固定的执行周期内,它将顺序地完成输入数据采集、控制逻辑运算和控制信号输出等过程。
在下一个执行周期内,仍然按照同样的执行顺序依次执行。
由于每个逻辑块的执行顺序是固定不变的,因此工程师在进行软件组态时,必须在保证逻辑功能正确的同时,要保证逻辑块执行顺序的正确性,确保控制逻辑正确执行。
模拟量控制中时序的错误,将会影响控制系统的精度,开关量控制中时序的错误,可能会造成错误的指令输出,例如设备误动或拒动。
1.2时序控制在Ovation中的应用在Ovation控制系统中,其控制器中的算法逻辑是顺序计算的,算法模块的执行有先后次序,这种有次序的执行方式即为Ovation中的时序控制。
OVATION 逻辑组态1、组态概述2、ovation组态及下装基本操作3、在线调试存在的逻辑4、建立宏算法;使用宏算法;实时回路中宏参数整定5、回路的备份及导入、导出1、组态概述控制器的特点– 5个任务区, 3-5号任务区可根据要求设置运算速度(10 ms - 30S);1号为100mS,2号为1000mS– Serial & Parallel I/O通讯方式可选;–冗余切换条件:控制处理器故障;网络通讯故障;I/O 接口故障;控制器电源断;控制处理器复位;控制器的负荷:每对控制器最多32000 个点;•每对控制器最多128 块I/O 模件(16 条支线);•每对控制器最多可接受4778 个I/O 点;•每对控制器最多1024 个SOE 点;•每对控制器最多2048X4 个第三方点;点的分* 点根据收集信息的对象不同分为十一大类:DU - 站点RN - 节点点RM - 模件点LA - 模拟量点DA - 豪华模拟量点LD - 数字量点DD - 豪华数字量点LP - 打包点(16个开关量)DP - 豪华打包点LC - 算法点PD - 打包数字量点(32位开关量或2个16位模拟量) (用于数据传送)加一个数字量选择完成填写表格中数据练习:建立数字量点1. 建立一个马达反馈信号点:(DI1-XXX)(LD类型的点;XXX为学习组的组号)Point:Description:点的描述(可写中文;如:马达反馈信号XXX);Characteristics:点的特征符;如:A-------OPP Rate:点的报警等状态的处理速度;一般与点的更新速度(Frequency)一致;Config:Status checking type:设置点的报警状态:Alarm on Zero)(当选择No Status Checking时,点为无报警);Security:设置点的操作权限范围:至少选择一个区名,否则,点将不能在操作站上操作。
1.Ovation 控制系统常用控制算法1-1. 模拟量控制常用算法1. 三选中MEDDIANSEL2. 二选一2XSELECT3. 加法器SUM4. 函数发生器 FUNCTION5. PID 调节器6. 软手操器 MASTATION7. 控制方式切换器MAMODE8. 控制输出平衡器BALANCER9. 切换器TRANSFER10. 常数发生器AVALGEN11. 高、低监视器HIGHLOWMON12. 低监视器LOWMON13. 高监视器HIGHMON1-2. 逻辑控制常用算法1. TD ON 延时闭合2. NOT 非门3. ONESHOT 上升沿脉冲发生器4. OR 或门5. AND 与门6. ASSINGN7. KEYBOARD 操作键盘接口2.控制算法基本概念2-1. 算法符号定义1. 实线实箭头模拟量点(必须输入或输出)2. 虚线空箭头数字量点(必须输入或输出)3. 虚线实箭头模拟量(任意)4. 虚线空箭头数字量(任意)2-2. 算法参数Variable(变量)=(输入/输出点)Tuning Constant(调整参数)=保持常量的固定参数(可在操作员站或通过Control Builder修改)Data Initialization (数据初始化参数)=固定常量(不可由OPR改变,可由CB 改变)Selectable(可选择的)=调整参数即可以是一个算法记录域的可调整常数也可以是一个点记录域。
2-3. 算法的品质检查和品质传递当一个无效数输入到算法时(如负数的平方根),一般输出也为无效,并且用Bad品质作标记。
无效数有三种:未定义的,不正常的,NAN。
一个未定义数是从没有合理结果的数学运算中产生的,一个NAN(非数值)无效字是一个不可识别的实数格式,且不该出现,当算数运算结果太小,以致无法用实数格式显示时,不正常数就产生了,此时站点进入报警状态,其故障码为66,错误标识ID=3。
算法输出点的品质选择输入点最差的品质。
上海西屋OV ATION培训总结目录概述 (6)第一周OV010及OV100综合 (7)一、OV ATION 系统概述 (7)1、工作站 (7)1.1服务器(Software Server) (7)1.2 工程师站(Engineering Working Station) (7)1.3 操作员站(OPR) (7)1.4 历史站(HSR) (7)1.5 OPC站 (7)2、控制器(冗余配置) (8)3、网络 (8)4、站的一般命名规则 (8)4.1 服务器:DROP 200 (8)4.2 工程师站:DROP 201 (8)4.3 操作员站 (8)4.4 历史站 (8)4.5 OPC站 (8)4.6 控制器 (8)二、OV ATION 系统网络介绍 (9)1、交换机的选型 (9)1.1 ROOT交换机G02、G03 (10)1.2 Fan-Out 交换机G04、G05 (10)1.3 Root 交换机G06、G07 (11)1.4 Root 交换机G08、G09 (11)1.5 Root 交换机G12、G13 (11)1.6 Core 交换机 (11)2、IP地址分配原则及通讯的实现原理 (12)2.1 OVATION网络IP地址分配原则 (12)2.2 OVATION系统不同类型设备通讯原理 (12)三、控制器、IOIC卡件介绍 (13)1、CPU模块5X00241G01 (13)1.1 控制器 (13)1.2 控制器的负荷 (14)1.3 控制器的指示灯 (14)1.4 控制器串行与并行通讯优缺点: (14)2、IOIC I/O接口卡:5X00226G01/G02 (15)3、I/O B ASE (15)4、终端模块 (15)5、I/O卡件 (16)四、I/O子系统 (16)1、I/O卡件安装原则 (16)2、I/O卡件的地址表示 (17)2.1 本地分支I/O卡件地址格式 (17)2.2 远程节点控制器 (17)2.2.1远程节电控制器通讯介质 (17)2.2.2 远程节点控制器地址的设置 (17)2.2.3 远程I/O节点控制柜卡件的地址格式 (17)3、信号线的连接 (18)4、电源分配单元:PDM (18)5、接地规则 (19)五、OV ATION DEVELOPER STUDIO (19)1、CPU(控制器)初始化及更换 (19)1.1 闪存格式化 (19)1.2 闪存卡插入CPU卡件,安装OCR400,连接网线 (20)1.3 查看CPU硬件地址 (20)打开Developer Studio,找到相应的控制器,右键Open (20)1.5 配置地址后通讯检查 (21)1.6 对控制器进行Download下装 (21)1.7 下装完成后状态检查 (21)1.8 清除控制器中旧文件 (21)1.9 对控制器做Load (22)2、点的概念 (22)3、卡件的定义 (22)3.1 卡件的创建 (22)3.1.1 模拟量输入卡AI卡创建(4—20mA) (22)3.1.2 模拟量输出卡AO创建(4—20mA) (24)3.1.3 热电阻输入卡件RTD创建 (24)3.1.4 热电偶输入卡TC创建 (25)3.1.5 数字量输入卡DI创建 (25)3.1.6 Relay Output 继电器输出卡 (25)3.2 卡件的删除 (25)3.3 卡件定义正确性检查 (26)4、点的创建 (28)4.1 AI点的创建 (28)4.1.1 新建 (28)4.1.2 定义点名:例 (28)4.1.3 定义点各个属性选项 (28)4.2 AO点的创建 (38)4.2.1 新建 (38)4.2.2 命名点名例如:TANKXXXFILLDMD-1 (38)4.3 热电偶TC点创建 (38)4.3.1 创建冷端温度补偿点(AI点) (38)4.3.2 创建TC温度点 (39)4.4 RTD热电阻点创建 (41)4.4.1 新建 (41)4.4.2 各个属性选项 (41)4.5 DI点创建 (43)4.5.1 新建 (43)4.5.2 命名 (43)4.5.3 各个属性选项 (43)4.6 DO点创建(同DI点相似) (44)4.7 LP打包点创建 (44)4.7.1 新建 (44)4.7.2 命名 (44)4.7.3 各个属性选项 (44)4.8 SOE点创建 (45)4.8.1 控制器配置 (45)4.8.2 SOE卡配置 (45)4.8.3 SOE点 (45)六、OV ATION APPLICATIONS (46)1、报警A LARM (46)1.1 状态指示 (46)1.2 报警复位原则:点值已恢复,报警已确认。
OVATION-艾默生过程控制公用事业部(PWS)网络Ovation网络在今天的过程控制领域,对于任何技术的投资必须考虑它与未来科技的发展的兼容性。
因此,控制系统需要一个开放的结构。
Ovation 采用适用于实时过程控制的通讯网络,具有最快的速度和最大的容量。
采用全冗余容错技术的Ovation Control Network 严格遵循IEEE的标准。
Ovation网络与通讯介质无关,既可采用光纤,也可采用UTP。
其采用的硬件极易在市场上购得,而且取消了对特殊网关和接口的要求,能够与企业内部 LAN,WAN 和 Intranet 的完全连通。
Ovation 的网络不使用常见的过程控制系统中数据高速公路与厂区内 LAN 连接所需的复杂网桥。
用户可用 Ovation 的统一网络,在确保过程安全的前提下,把过程控制同企业信息系统结合起来。
Ovation的高速网络不同于其它DCS系统,它是一个完全确定的实时数据传输网络,即使在工况扰动的情况下也决不丢失、衰减或延迟信号。
网络标准Ovation 能够把控制机制和信息整体结合起来,是实现投资目标的有效途径。
它能允许最终用户使用最好的方法来组织他们的信息集合,而不用考虑协议、网络管理和操作系统等等。
Ovation 网络软件使用 ISO/OSI 可以在任何一个标准物理网络层中通讯,具有所有网络的特性:冗余、同步、确定和令牌传输。
当在与以太网、快速以太网、令牌环或其它拓扑结构相连时,它使用TCP/IP协议。
因为Ovation系统在控制系统网络术上的突破,最终用户为了在局域和广域范围内(LAN 和WAN)构建信息系统,可以合成多个网络系统。
所有其它分散控制系统厂商为了控制系统和厂区局域网相连接所设计的各种网关和用户接口在Ovation系统并不需要。
Ovation 系统设计原则是将从上到下的所有标准都合成一个完全开放的环境,所以Ovation 允许最终用户在系统中集成其它厂商的产品。
OVATION系统配置描述OVATION系统特点及其在电厂优化设计中的应用一、DCS发展的新阶段自从70年代年推出第一套工业DCS系统到现在已有24年了。
DCS由于集成了4C技术(puter,munication,CRT,Control)克服了传统仪表自动化系统中诸多缺点,实现了仪表自动化领域中的四个取代,即:1、用数字技术取代模拟技术,使测量精度提高了一个数量级。
2、用CRT取代了常规模拟仪表,压缩了监视面和控制室面积,使运行操作员得到的过程信息更集中、更生动和丰富多彩,操作更灵活有效。
3、用编程技术取代了原调节顺控的硬接线,极减少了施工调试工作量,使自动、顺控的投入率有很大的提高,取得了明显的效益。
4、用先进控制算法部分取代常规PID算法,使一些用PID算法不易取得实效的过程实现了自动。
提高了控制精度,这一过程目前仍在继续。
但是我们还应当看到当前在我国电力工业中使用的众多DCS系统及其应用还存在不少问题。
首先,我们当前使用的DCS绝大部分都是专利的不开放系统,由于目前大部分DCS是不开放的,所以DCS总的技术水平落后于计算机技术的发展水平。
其次,当前电力工业中应用的DCS 绝大部分未实现物理分散。
为了实现DCS ,把所有测点都引入中央控制室,其电缆费用高得惊人。
以2×300MW机组为例,其控制测量用电缆高达1400公里,与电缆有关的直接间接费用高达5000万元,大大高于DCS本身的费用。
第三,DCS使用围不宽,当前还只限于机炉本身的控制,电气控制纳入DCS 才刚开始,未能使DCS成为电厂各车间的信息中心。
工作站和以PC为基础的人机界面,以工业PC为基础的I/O控制器IEEE标准网络技术及规约组成的过程控制系统才是真正开放的计算机系统。
二、OVATION系统特点介绍OVATION系统是西屋公司在总结WDPF系统大量使用经验基础上容纳了最新技术成就,历时3年,于1997年9月正式宣布可在我国投放市场。
OVATION-西屋过程控制及信息技术之大成西屋公司OVATION系统,包括以下几部分:1.OVATION 控制网络(FDDI)。
2.OVATION控制器。
3.OVATION过程I/O4.OVATION人机界面OVATION系统概要:西屋采用商用、可靠的工具,包括:•通讯网络•操作系统•标准工作站•工业标准结构•开放式通讯协议1.OVATION控制网络:OVATION的高速FDDI网络不同于其它DCS系统,它是一个完全确定性实时数据传输网络,即使在工况扰动的情况下也决不丢失、衰减或延迟信号。
此外,按照ANSI标准,FDDI提供全冗余的反转双环,并且在双环电缆中断时,使用自动重新组态功能以屏蔽发生错误的部分。
1.1 网络标准FDDI网络可使用户采用最好的方法来获取系统信息,不用考虑协议、网络管理和操作系统等。
OVATION网络软件采用ISO/OSI标准,可以在任何一个标准物理网络层中通讯,在使用FDDI时具有所有网络的特性:冗余、同步、确定和令牌传输。
当在与以太网、快速以太网、令牌环或其它拓扑结构相连时它使用TCP/IP协议。
OVATION系统的设计原则是从上到下的所有标准都合成一个完全开放的环境,所以OVATION允许最终用户在系统中集成其它厂商的产品。
基于开放式的通讯协议,OVATION 系统已经成功的将全厂区域自动控制和信息组成了一个整体,在今后所有的版本中也会无一例外的使用所有标准组合。
1.2 特性:2.OVATION控制器特点:•具有处理多种应用程序(包括网络)的能力•提供控制器完全无扰动切换的能力•兼容第三方用于数据通讯、控制、用户 C 语言编程和仿真的软件•支持多任务和优先任务计划•完全符合 POSIX1003.1b的开放系统标准•容易理解的命名法表示过程点(优于使用复杂的名称或硬件地址加偏移量的命名法)•RTOS所占内存低于 50KB•RTOS存储和启动使用闪存(Flash Memory-20MB) (无需电池固化的内存)•RTOS的模块式结构只执行控制算法和通讯的功能•应用软件的组态程序记录在闪存中2.1 控制器硬件的规格2.2 控制器规格:2.3 应用程序:OVATION控制器为了满足用户的需求,提供了大量的应用程序和功能:•连续(PID)控制•布尔逻辑•特殊逻辑和定时功能•数据采集•SOE处理•冷端输入补偿•过程点传感器/限位检验•过程点报警处理•过程点转换为工程单位•过程点数据库存储•就地和远程 I/O接口•过程点上标签2.4 历史事件顺序(SOE)整体的 SOE处理能力由 I/O子系统和标准软件提供。
OVATION 逻辑组态1、组态概述2、ovation组态及下装基本操作3、在线调试存在的逻辑4、建立宏算法;使用宏算法;实时回路中宏参数整定5、回路的备份及导入、导出2、用Control Builder组态工具组态新建回路步骤:1. 打开Ovation Developer Studio目录树;2. 展开控制器目录树;3. 选择任务区;4. 右键–选择菜单上的Insert New;5. 填写回路描述、回路号,及回路的描述;6. CB工具将被打开;7. 组态回路算法;8. 保存回路;9. 对控制器下装控制逻辑,在下装的同时也将SAMA图下装到了操作站;Control Builder 组态工具图标菜单加算法加算法管角 算法与算法的连接移动选中项 删除选中项 回路存盘 打开某个回路标准算法输入/输出算法全屏显示 图中算法对齐 加算法信息到图 图放大缩小 第三步:使用控制回路组态工具进行回路的组态;基本操作:增加、删除、移动算法;增加、删除、编辑信号线Property EditorMain windowObject Browser在回路窗右键功能菜单二:在回路中对图符拷贝,删除,移动等操作:选择相应对象后,在其空白地方右键 – 出现菜单。
练习图符拷贝, 删除, 移动自定义算法名:与GB 相关的算法,如MAstation ,MAmode ,setpoint ,keyboard ,2Xselect ,mediansel 等算法,建议自定义算法名; 步骤:第一步:选中算法,在左边的属性编辑窗口,Algorithm Control Record :填入自定义的算法名;第二步:Edit 菜单-Create User Points…,选择自定义的算法名,点类型为LC ,选择Create Points 按钮,创建自定义的算法名,可以在回路所在的控制器,Points -Algorithm Points 中找到新创建的自定义算法名;访问实时控制图回路图的方法方法一:使用操作站上操作应用工具中的回路调出工具:Start -> Ovation -> Ovation Applications方法二:使用含有点的有关信息的操作窗口(如:Point Information,报警窗等),使用右键菜单上的Signal Diagram菜单调出与此点有关的控制回路图。
1.Ovation 控制系统常用控制算法1-1. 模拟量控制常用算法1. 三选中MEDDIANSEL2. 二选一2XSELECT3. 加法器SUM4. 函数发生器FUNCTION5. PID 调节器6. 软手操器MASTATION7. 控制方式切换器MAMODE8. 控制输出平衡器BALANCER9. 切换器TRANSFER10. 常数发生器A V ALGEN11. 高、低监视器HIGHLOWMON12. 低监视器LOWMON13. 高监视器HIGHMON1-2. 逻辑控制常用算法1. TD ON 延时闭合2. NOT 非门3. ONESHOT 上升沿脉冲发生器4. OR 或门5. AND 与门6. ASSINGN7. KEYBOARD 操作键盘接口2.控制算法基本概念2-1. 算法符号定义1. 实线实箭头模拟量点(必须输入或输出)2. 虚线空箭头数字量点(必须输入或输出)3. 虚线实箭头模拟量(任意)4. 虚线空箭头数字量(任意)2-2. 算法参数Variable(变量)=(输入/输出点)Tuning Constant(调整参数)=保持常量的固定参数(可在操作员站或通过Control Builder修改)Data Initialization (数据初始化参数)=固定常量(不可由OPR改变,可由CB改变)Selectable(可选择的)=调整参数即可以是一个算法记录域的可调整常数也可以是一个点记录域。
2-3. 算法的品质检查和品质传递当一个无效数输入到算法时(如负数的平方根),一般输出也为无效,并且用Bad品质作标记。
无效数有三种:未定义的,不正常的,NAN。
一个未定义数是从没有合理结果的数学运算中产生的,一个NAN(非数值)无效字是一个不可识别的实数格式,且不该出现,当算数运算结果太小,以致无法用实数格式显示时,不正常数就产生了,此时站点进入报警状态,其故障码为66,错误标识ID=3。
算法输出点的品质选择输入点最差的品质。
过程点或算法点的2W状态字描述的是算法生成的错误信息,3W状态字描述的是算法工作模式状态字(如:跟踪,手动,自动等)。
2-4. 算法的硬件地址当MASTAION算法与LI卡件相连接时,需要在MASTAION算法内填入LI卡件的硬件地址。
确定卡件地址的主要步骤如下:1. 通过点信息查看模块点记录2. 选择模块点记录的HARDWARE标签,在HD字段中寻找十六进制表示的硬件地址该算法需要卡件的基地址,因此将硬件地址中的“D”去掉并将其换成”0”。
3. 把该地址输入到MASTATION算法的硬件地址字段内,如:LI卡的HD=0x9D则填入MASTATION 0x90。
2-5. 跟踪原则(CB在一张图内自动设置算法跟踪)1. 若下游的跟踪有多个源,则跟踪最初建立的算法(小号算法),可以手动改变跟踪顺序。
2. Balancer算法不受限制,它可跟踪16个下游算法。
3. 通过EDIT编辑算法清除算法的TRIN域即可消除跟踪。
4. 出现下列情况,跟踪将被修改。
⏹选择带有TRIN引脚的符号⏹与TRIN引脚连接5. 若非跟踪算法被插入到跟踪算法之间,需人工建立跨越该算法的跟踪。
6. 设置算法的TPSC和BTSC域实现抗积分饱和。
7. 跨页跟踪需要人工在页连接符号填入跟踪点名和页号。
2-6. 算法跟踪策略由跟踪信号在算法之间的传递来实线算法间的跟踪,这些信号告诉上游算法是否处在跟踪状态和下游算法需要什么值来取得当前的输出值。
跟踪逻辑的插入是透明的,不需用户完成,而用户可以进行阻断跟踪逻辑,一般对于只有IN1输入的算法都有一个用于跟踪的输出点TOUT,TOUT包括:串接IN1变量的跟踪输出值,工作模式及状态输出信号。
一些算法的TOUT作为上游算法的TRIN(包括:模拟量输入及限制,模式输入信号等)当前输入变量多于1个时,TOUT就被传递给IN1输入端。
2-6-1.设置和使用数字跟踪信号跟踪:PID算法:设定值=过程值,输出值=跟踪输入值TRANSFER算法:未被选中的那一端进入跟踪状态MASTA TION算法:第一次上电时读硬件值后设置回路跟踪传递,当跟踪输入为“真”,所有算法都设置跟踪输出为“真”。
3.算法功能3-1. 三选中(MEDIANSEL)功能:监视3个模拟量输入的品质和相互之间的偏差,正常情况下算法的输出为3个输入模拟量的中间值,反之,算法确定为最好的或者尽可能正确的输入,或者输入的平均值作为输出。
3-1-1.算法符号3-1-2.算法输入信号:3个输入模拟量(通常是硬件点)XA,XB,XC3-1-3.算法输出信号:1 OUT (中间值)2 HI (选择高报警模拟量输出)3 LO (选择低报警模拟量输出)4 提供12个数字信号输出,表明算法输入的状态。
5 1个成组开关量点PBPT(表明算法输入的状态)12个开关量输出点的定义:ABDA 输入变量A和B之间偏差大――――报警输出ABDC 输入变量A和B之间控制偏差大――――报警输出ACDA 输入变量A和C之间偏差大――――报警输出ACDC 输入变量A和C之间控制偏差大――――报警输出BCDA 输入变量B和C之间偏差大――――报警输出BCDC 输入变量B和C之间控制偏差大――――报警输出XABQ A传感器品质坏―――报警输出XBBQ B传感器品质坏―――报警输出XCBQ C传感器品质坏―――报警输出XBQ 3个传感器品质坏―――报警输出XALM 传感器故障报警,包括任一信号品质坏报警,控制偏差报警,报警偏差报警等。
MRE 切手动(包括:3个输入品质报警,1个输入品质报警另2个控制偏差报警,3个点之间都存在控制偏差报警。
)PBPT成组点包括16个bit位:0-15bit分别定义MRE,传感器故障,测点品质报警,控制偏差报警,报警偏差报警等信息。
Bit 0: Manual rejectBit 1: Transmitter malfunctionBit 2: All transmitters in Quality AlarmBit 3: Quality Alarm for Transmitter ABit 4: Quality Alarm for Transmitter BBit 5: Quality Alarm for Transmitter CBit 6: Alarm deviation between Transmitters A and BBit 7: Alarm deviation between Transmitters A and CBit 8: Alarm deviation between Transmitters B and CBit 9: Control deviation between Transmitters A and BBit 10: Control deviation between Transmitters A and CBit 11: Control deviation between Transmitters B and CBit 12: Inhibit Control Deviation Check for MRE OutputBit 13: Transmitter A modeBit 14: Transmitter B modeBit 15: Transmitter C mode3-1-4.与操作键相关的功能键定义P1:请求中间模式P2:请求传感器AP3:请求传感器BP4:请求传感器CP5:禁止控制偏差报警检查,输出MRE手动抑制信号。
3-1-5.算法参数1. 控制字CNTL设定品质报警的品质类型:bit 0:MRE信号类型:0 =脉冲信号,1 =持续信号。
bit 1:高/低输出:0 =选择高值GOOD品质输出,1 =选择低值GOOD报警(与HMTR和LMTR有关)。
bit 2:品质报警类型: 0 =品质坏BAD报警,1 =品质非好NOT GOOD 报警。
2. 报警偏差死区ALDB当两个点之间的偏差大于ALDB规定的值时,输出偏差报警数字信号。
3. 控制偏差死区CNDB当两个点之间的偏差大于CNDB中规定的值时,输出控制偏差报警数字信号,ALDB 的值要比CNDB值小。
4. 高报警监视值HMTR数值,用于当一个点的品质为Bad,且剩余2个点有偏差报警时,输出点的选择值。
5. 低报警监视值LMTR数值,用于当一个点的品质为Bad,且剩余2个点有偏差报警时,输出点的选择值。
6. 高报警监视值HI(输出模拟量)7. 低报警监视值LO(输出模拟量)3-1-6.算法输出控制策略分析⏹如果3个传感器都处在品质报警状态,其输出值保持最后的Good状态值不变,品质为Bad(或者输出无效)。
⏹如果2个传感器处在品质报警状态,其输出值取不在品质报警传感器的值。
⏹如果1个传感器处在品质报警且剩余2个点品质为Good且无偏差报警时,其输出取剩余2个点的平均值。
⏹如果1个传感器处在品质报警且不在品质报警状态的两个传感器有一个控制偏差报警时,其输出值为:●如果两个值的高值大于HMTR给定值,且较低值不处于监视报警状态,则输出值为较高值。
●如果两个值的低值小于LMTR给定值且较高值不处于高监视报警值状态,则输出为较低值。
●或者根据控制字CNTL初始定义的选高/低原则确定输出参数值。
⏹如果3个点无品质报警,但相互之间都有控制偏差,则输出值为:●如果3个输入的最高值大于HMTR规定值,则选择最高值●如果3个输入的最高值低于LMTR规定值,则选择最低值●或者,按控制字CNTL初始定义的选高/低原则确定输出参数值。
⏹如果3个传感器都不在品质报警状态,或者无控制偏差报警状态,则高报警输出值HI=OUT 低报警输出值LI=OUT,否则高报警输出值HI=无品质报警的最高值,低报警输出值=无品质报警的最低值。
3-2. 2XSELECT 选择或监控两个传输信号功能:监视两个输入信号的偏差和品质,可手动或自动执行输出值的选择方案。
算法符号:1 Average2 Lower3 Higher4 Transmitter A5 Transmitter BMode Output ValueAverage Average value of the two transmitterinput valuesLower Lower value of the two transmitterinput valuesHigher Higher value of the two transmitterinput valuesTransmitter A Value of Transmitter ATransmitter B Value of Transmitter BFunction Key UseP1 Transmitter A mode requestP2 Transmitter B mode requestP3 Toggle the inhibiting of the ControlDeviation Alarm check on the manualreject (MRE) outputP4 Average mode requestP5 Lower mode requestP6 Higher mode request3-3. PID 比例加积分加微分控制器功能:PID算法提供一个比例加积分加微分的控制器函数,输出值可由用户定义范围限制,并且在内部实现抗积分饱和。