基于SOCKETt和PLC的远程控制系统
- 格式:doc
- 大小:233.00 KB
- 文档页数:17
基于PLC的远程监控与控制系统设计引言现代工业领域中,远程监控与控制系统的设计与实施举足轻重。
随着技术的不断进步,工业自动化程度逐渐提高,企业对于能够远程监控与控制生产过程的系统需求也越来越迫切。
基于可编程逻辑控制器(PLC)的远程监控与控制系统成为工业界的主流选择之一。
本文旨在探讨基于PLC的远程监控与控制系统的设计原理、特点以及实现方法。
PLC的基本原理与特点PLC是一种特定用途的数字计算机,其核心是CPU、存储器、输入/输出(I/O)模块以及通信模块等。
PLC的工作原理为:根据预先设定的控制程序,通过输入模块采集外部信号,经过CPU处理后,再通过输出模块控制外部设备。
PLC具有以下特点:1. 高可靠性:PLC采用可靠的硬件结构和操作系统,能够适应各种恶劣工业环境,并且具备故障自诊断和容错能力。
2. 可扩展性:用户可以根据需要,通过添加不同类型的I/O模块或者通信模块,灵活扩展PLC的功能。
3. 强大的运算能力:PLC的处理速度快,具备多通道输入输出功能,能够处理复杂的控制逻辑。
远程监控与控制系统设计的目标与要求在工业生产中,远程监控与控制系统的设计目标是提高生产效率、减少人为错误、降低成本并确保安全。
因此,设计远程监控与控制系统需要满足以下要求:1. 实时性:远程监控与控制系统需要能够及时响应远程操作指令,并且将实时数据反馈给控制中心。
2. 稳定性:远程监控与控制系统需要稳定运行,不易受到外界干扰,保证生产过程的连续性和稳定性。
3. 安全性:远程监控与控制系统需要具备安全保护措施,防止非法访问、数据泄露以及黑客攻击。
PLC与远程监控与控制系统的结合基于PLC的远程监控与控制系统的设计是将传统的PLC系统与现代网络技术相结合,实现远程操作与监控。
其基本架构如下图所示:[插入一张图,展示基于PLC的远程监控与控制系统的基本架构]远程监控与控制系统的设计步骤设计基于PLC的远程监控与控制系统一般包括以下步骤:1. 系统需求分析:根据企业实际需求,确定远程监控与控制系统的功能和性能要求。
基于PLC的远程控制系统设计程明星【摘要】本文基于HM S公司工业远程网关Flexy205和西门子公司PLC S7-1500T,设计了伺服电机的远程控制系统,并对整个控制系统的结构、软件的设计以及组态过程进行了介绍.远程网关Flexy205通过与云端服务器通讯,完成现场PLC S7-1500T与远程控制终端互联,从而实现伺服电机远程控制的目的.【期刊名称】《科技视界》【年(卷),期】2019(000)008【总页数】2页(P107-108)【关键词】电机控制;远程控制;PLC;组态软件【作者】程明星【作者单位】凯迈〈洛阳〉机电有限公司,河南洛阳 471000【正文语种】中文【中图分类】TU855;TP391.44;TN929.50 引言随着科学技术的不断发展,远程控制技术日益受到人们的重视,逐渐被应用于各行各业中[1-3]。
特别是在工业自动化控制领域,随着本地通信控制技术的局限性日益突出,采用有线或者无线网络进行远程通信控制的方式逐渐进入人们的视野 [4-5]。
该技术使得工程师可以通过网络随时随地访问现场自动化设备,实现对远端设备运行数据的实时监控和报警管理 [6],从而达到对现场运行设备的性能远程监控和预见性维护的目的[7]。
同时,该技术还可以对设备运行的数据进行记录和存储,用于对设备历史数据的统计与分析,为设备制造商对设备性能的持续优化改进提供可靠的数据支持;同时还可对现场设备进行远程应用调试、操作,实现工程师不必到达设备现场,即可对设备进行远程调试、排除故障,大大地减少设备维护成本,并优化设备正常运行时间,从而提高设备的生产效率和公司的经济效益。
本文采用工业远程网关Flexy205与PLC S7-1500T相结合,设计了一种伺服电机的远程控制系统。
同时对该系统的远程程序下载、设备监控以及故障报警提醒等功能进行了实验验证。
1 远程控制技术的原理远程控制系统通常可以划分为远程控制终端系统、远程数据传输系统以及现场设备控制系统三部分[8]。
文献综述基于PLC的远程温度控制系统的设计与调试一、概述在现代工业生产中,许多领域都需要对温度的监控,如工厂的生产设备、医药生产、航空航天、化工领域、农作物的种植和储存、实验室等等. 有很多领域的温度可能较高或较低,人无法靠近或现场无需人力来监控, 我们可以用远程监控,坐在办公室里就可以对现场进行监控,又方便又节省人力。
随着电子技术的发展, 可编程序控制器(PLC)已经由原来简单的逻辑量控制, 逐步具有了计算机控制系统的功能,同时还能实现与PC机的交流,可以实现连续复杂的控制。
在现代工业控制中, PLC 占有了很重要的地位, 它可以和计算机一起组成控制功能完善的控制系统。
在许多行业的工业控制系统中, 温度控制都是要解决的问题之一。
如塑料挤出机大都采用简单的温控仪表和温控电路进行控制, 存在控制精度低、超调量大等缺点, 很难生产出高质量的塑料制品。
在一些热处理行业都存在类似的问题。
所以,设计一个较为通用的温度控制系统具有重要意义,具体系统参数或部分器件可根据各行业的要求不同来进行调整。
二、研究历史与现状通常由位式或时间比例式温度调节仪控制的工业加热炉温度控制系统,其主回路由接触器控制时因为不能快速反应,所以控温精度都比较低,大多在几度甚至十几度以上。
随着电力电子技术及元器件的发展,出现了以下几种解决的方案:1、主回路用无触点的可控硅和固态继电器代替接触器,配以PID或模糊逻辑控制的调节仪构成的温度控制系统[5],其控温精度大大提高,常在±2℃以内,优势是采用模糊控制与PID 控制相结合,对控制范围宽、响应快且连续可调系统有巨大的优越性。
2、采用单片机温度控制系统[16]。
用单线数字温度传感器采集温度数据,打破了传统的热电阻、热电偶再通过A/D 转换采集温度的思路。
用单片机对数字进行处理和控制,通过RS - 232 串口传到PC 机对温度进行监视与报警,设置温度的上限和下限。
其优势是结构简单,编程不需要用专用的编程器,只需点击电脑鼠标就可以把编好的程序写到单片机中,很方便且调试、修改和升级很容易。
毕业设计(论文)开题报告1 选题的背景和意义远程控制是在网络上由一台主控端计算机远距离地控制另一台被控端计算机的技术。
随着网络技术的发展,电脑的管理及技术支持的需要,远程操作及控制技术越来越引起人们的关注[1]。
采用远程控制主要是因为方便、效率和安全这三方面的因素。
1.1 选题的背景目前,大多数远程进程间通信代码是用Socket编写的。
实际应用中用Socket传输信息并不是独立的,它在多线程的处理环境中应用更为广泛[2]。
Socket通常也称作“套接”。
用于描述IP地址和端口,是一个通信链的句柄。
应用程序通常通过“套接字”向网络发出请求或者应答网络请求。
Socket有两种主要的操作方式:面向连接的和无连接的。
Socket利用客户/服务器模式解决了进程之间建立通信连接的问题[3]。
1.2 国内外研究现状及发展趋势远程控制技术由来已久,是控制领域的一项重要技术。
国内外在远程控制方面的应用十分广泛,而且进展迅速,大体来看分为几种:一是对计算机网络自身性能的监控。
这种应用可以自动跟踪目标计算机的屏幕变化、获取目标计算机登录口令及各种密码类信息、获取目标计算机系统信息、限制目标计算机系统功能、任意操作目标计算机文件及目录、远程关机、发送信息等多种监控功能。
二是对现场状况的实时监控,多用于酒店、银行或住宅等系统监视方面。
这种应用使用摄像机云台,基于无线网络的远程控制平台研究与实现实际上是一种被动的监视系统;三是对作业现场有效数据的采集监视,是种主动监控方式,多用于水文水利、电力、机械生产等方面[4]。
目前,基于因特网的远程控制国内外电都有不同程度的研究,相对来说,由于西方国家在信息技术和计算机技术的发展上的优势,他们在研究基于因特网的远程控制方面相对早一些,而且主要集中在机器人领域。
例如:美国南加州大学研制的可播种和浇水的远程控制花园Telegarden、英国Bradford大学的远程机器人望远镜系统、澳大利亚Wollogong大学拾取木块的Roboty系统等。
基于SOCKET技术的计算机远程控制实现陈世军【期刊名称】《计算机光盘软件与应用》【年(卷),期】2012(000)002【摘要】Today, the computer network has become an integral part of human social life,which the computer's remote control system is to play a role in promoting the advancement of society as a whole.In addition to in addition to the production of industrial automation,computer remote control system is also widely used in office,technical support and other aspects.In this paper, design a simple SOCKET technology based on computer remote control system.%时至今日,计算机网络已经成为了人类社会生活中必不可少的组成部分,其中计算机的远程控制系统更是为整个社会的进步起到推动作用。
除了在工业自动化生产之外,计算机远程控制系统还广泛的应用于办公、技术支持等方面。
在本文中,将设计一种简单的基于的SOCKET技术的计算机远程控制系统。
【总页数】2页(P124-124,126)【作者】陈世军【作者单位】湖北电信业务技术支撑中心,武汉430015【正文语种】中文【中图分类】TP273.5【相关文献】1.浅论关于SOCKET技术的计算机远程控制实现 [J], 陆讷2.基于Socket技术的计算机远程控制实现 [J], 朱量;应捷3.关于SOCKET技术的计算机远程控制实现 [J], 刘昆扬4.基于Socket技术的计算机远程控制实现 [J], 魏玉清;5.基于Socket技术的计算机远程控制实现 [J], 朱量; 应捷因版权原因,仅展示原文概要,查看原文内容请购买。
基于Socket的实验室教师机远程控制系统的设计与研究的开题报告1. 研究背景和意义现代教育越来越强调实验教学的重要性,实验课程已成为高等教育教学中不可或缺的组成部分。
教师机(也称为实验室控制主机)在实验室教学中起着重要的作用,它能够控制实验室中的各种设备,包括测量仪器、电路、器件等,使得教师可以对实验课程进行更好的管理和控制,同时也增加了实验教学的趣味性和实用性。
然而,传统的教师机只能在实验室内进行控制,无法实现对实验室的远程控制,这在某种程度上限制了教学的灵活性和效果。
随着计算机网络技术的不断发展和普及,基于Socket技术的远程控制系统成为实现教师机远程控制的重要手段。
Socket技术是一种应用层协议,通过Socket技术,可以实现在网络上两个进程的相互通信。
在此基础上,可以开发出客户端/服务器端的应用程序,同时实现远程控制和数据传输等功能。
因此,本课题的研究意义在于设计和开发一种基于Socket的实验室教师机远程控制系统,使得教师可以在任何地方通过网络对实验室中的设备进行控制和管理,从而提高实验教学的效率和质量。
2. 研究内容(1)系统架构设计。
本研究将开发一个基于Socket的远程控制系统,包括客户端和服务器端两部分。
客户端提供用户界面,可通过网络连接到服务器端。
服务器端通过与实验室中的设备进行通信,实现命令的下达和数据的传输。
(2)通信协议设计。
在实现客户端和服务器端之间的通信时,需要制定一种通信协议。
本研究将设计一种基于Socket的通信协议,定义消息格式、数据传输方式等内容,从而保证通信的稳定和正确。
(3)界面设计。
客户端需要提供易于使用的用户界面,使得教师可以方便地将命令发送到服务器端并获得反馈信息。
本研究将设计一个符合人机交互原理的用户界面,实现可视化操作和信息反馈。
(4)数据传输和控制算法设计。
在实验室教学中,实验设备的控制和数据的传输是系统的核心功能。
本研究将研究和设计一套高效可靠的数据传输和控制算法,保证实验数据的准确和实验操作的稳定。
第20卷第8期长春大学学报Vol.20No.82010年8月JOURNAL OF CHANGCHUN UNIVERSITY Aug.2010收稿日期:2010-06-21作者简介:刘玉宝(1975-),男,吉林榆树人,讲师,博士研究生,主要从事嵌入式系统,智能控制,软件工程等方面的研究。
基于SOCKET 技术的几种远程控制功能的实现刘玉宝1,祝海英2,张良和1(1.长春大学软件学院,吉林长春130022;2.长春职业技术学院信息技术分院,吉林长春130033)摘要:远程控制可以作为远程维护,远程办公等应用领域的支持工具。
本系统采用VC ++进行设计和制作,控制端与服务端连接后实现被控端的服务控制功能、进程管理功能、屏幕截取及控制功能,以便进行计算机远程管理和维护。
关键词:远程控制;主控端;被控端;C /S 模式中图分类号:TP311.1文献标志码:A 文章编号:1009-39072010)08-0084-040引言远程控制的原理很简单:本地机直接启动运行的主控端程序,并拥有与被控端主机使用者相同的权限。
因此,如果能够启动服务器端的被控端程序,就可以使用相应的客户端程序直接控制主机。
也就是说,客户端就相当于一个超级用户,可以直接控制远程服务端计算机。
1远程控制原理简单远程控制系统由主控端和被控端两部分组成。
主控端用于实施各种对连网计算机的监控操作,被控端对于接收到的数据进行分析,解释并执行[1],在Windows 环境下即可实现。
本系统采用面向连接的服务实现控制信息的传输。
面向连接服务器处理的请求往往比较复杂,不是一来一去的请求应答所能解决的,而且往往是并发服务器。
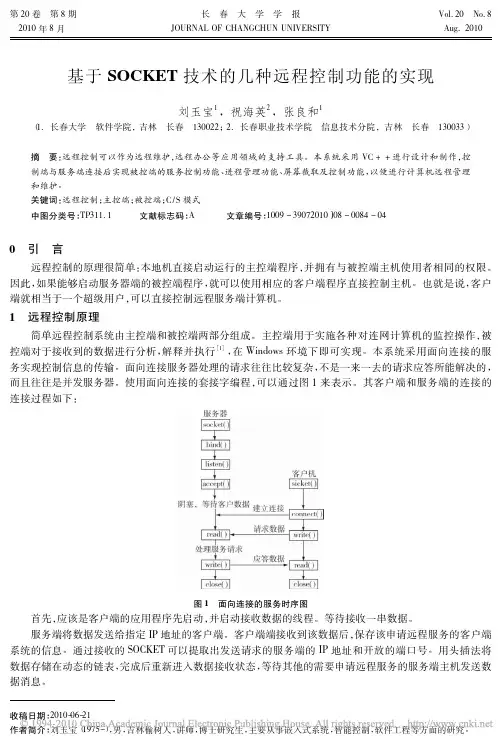
使用面向连接的套接字编程,可以通过图1来表示。
其客户端和服务端的连接的连接过程如下:图1面向连接的服务时序图首先,应该是客户端的应用程序先启动,并启动接收数据的线程。
等待接收一串数据。
服务端将数据发送给指定IP 地址的客户端。
客户端端接收到该数据后,保存该申请远程服务的客户端系统的信息。
plc设备远程控制系统采用工业互联网与大数据分析技术,实时监控异地设备运行状态,为设备提供定制化的响应式服务,包括设备的智能分析诊断、预测性维护、节能管理、空中升级和远程作业指导等,减少因设备意外停车引起的生产停滞,提高设备利用率,为设备健康与安全高效生产保驾护航。
实时监控设备状态,预测感知设备健康情况变化,提前预警。
大数据分析设备运转情况、能耗情况与报警信息,建立设备的对标管理,为提高设备利用率与节能提供策略与解决方案。
PLC控制系统帮您实现设备远程监控目前来说,对PLC实现远程控制已经不是难事情,PLC厂家也已经具备对应的成套系统软件可以对联网的plc集成进行上下载操作,功能比较单一,仅能够对PLC程序的上下载。
对于目前大环境来说,对设备的远程运行数据的监控是十分重要的。
通过采集PLC的运行数据既可以得到设备的状态并远程控制机器的启停和故障报修等综合应用。
设备怎么实现远程控制?通过现场设备及PLC通过以太网或RS485/RS232/RS422串口方式接入HINET工业智能网关中(或者其他品牌网关),HINET智能网关依靠自身协议解析以及数据传输功能将解析好的数据通过4G或者有线网络传输至互联网,进而传输到服务器中。
最后通过服务器中部署的数据平台系统,将设备监控数据、业务数据以及其他数据发布到监控大屏及各个监控端。
通过PLC云组态平台可实现对设备的远程监控和控制。
华辰智通科技有限公司自主研发的基于云平台的设备云远程综合管理系统(Hignton Device Cloudy Remote Supervisory Solution 英文简称HDRS)是专门针对PLC等工业设备远程综合管理系统。
系统以云为基础构建了一套计算与服务体系,可以为客户提供海量的设备接入及客户访问机制。
设备云远程综合管理系统基于虚拟专用网络(英文简称“VPN”)技术构建了一条设备与用户之间的专用安全通道,让设备厂商像在现场一样可以随时随地对设备进行编程,监控等所有操作。
物联网环境下基于PLC的远程控制系统设计发表时间:2018-08-20T17:22:00.973Z 来源:《电力设备》2018年第15期作者:付林[导读] 摘要:在实际生产过程中,PLC系统总是随着工业设备放置在工业现场,甚至跟随产品出售到全国各地。
(冰轮环境技术股份有限公司山东烟台 264000) 摘要:在实际生产过程中,PLC系统总是随着工业设备放置在工业现场,甚至跟随产品出售到全国各地。
一旦设备运行出现问题或程序需要修改或调试,就需要技术人员到现场进行作业,这大大增加了企业的时间成本和人力成本。
随着网络技术和工业控制的快速发展,远程通过工业物联网对设备系统的控制单元PLC进行程序修改、运行监控的技术也得以发展。
为此,在接下来的文章中,将围绕物联网环境下基于PLC的远程控制系统设计方面展开详细分析。
关键词:物联网;远程控制;PLC;系统设计引言:在物联网环境下构建远程控制系统,将在智能家居控制、远程探测、模式识别等领域具有重要的应用价值。
文章主要对物联网环境下基于PLC的远程控制系统设计进行了分析,希望能够给相关人士提供重要的参考价值。
一、远程控制系统的原理与优势(一)远程控制系统的原理 PLC远程控制系统以云服务器为基础,将PLC、工控触摸屏、远程控制模块等设备通过交换机组建在一个局域网里面,将远程控制模块接入互联网或4G网络,进而接入云平台中。
只要用户接入互联网,通过专用地址通道访问到设备所在的网络中,就可以像在现场一样随时随地对PLC进行编程、程序监控,对触摸屏组态界面进行修改和运行监控等操作。
在PLC远程监控系统中,云平台会对数据传输的信息加密,并对连入网络的终端进行安全认证和数据访问过滤,防止网络被破解和防止外界接入链接,保证数据的安全性[1]。
(二)远程控制系统的优势于工业物联网技术的PLC远程控制系统结合现代信息处理技术和无线网络技术进行模块化平台的远程控制,支持PLC和HMI屏幕远程监控、远程调试、远程下载。
第 22卷第 1期佛山科学技术学院学报 (自然科学版 V o l . 22N o . 1 2004年 3月 Jou rnal of Fo shan U n iversity (N atu ral Science Editi on M ar . 2004文章编号 :100820171(2004 0120037204基于 Socket 的局域网管理系统的设计与实现朱玉玺 1, 刘亚姝 2(1. 佛山科学技术学院工学院 , 广东佛山 528000; 2. , 北京 100044摘要 :基于 Socket 技术 , 采用流式套接字及 TCP , 。
具体实现了“局域网的管理” , 在局域网上对。
关键词 :Socket ;中图分类号 :T P 393. 文献标识码 :A随着 In ternet 的快速发展 , 局域网作为一个行政区、企业、部门的内部信息传递网络 , 越来越受到重视。
但局域网内的机器数量的增加 , 对其设备的的管理则需要配备相当的人力资源 , 为了探讨“资源配备” 和“管理的效果” , 采用了Socket 设计技术、开发了一个局域网管理系统。
Socket (套接字是一种网络编程接口 , 它是对通信端点的一种抽象 , 提供了一种发送和接收数据的机制 [1]。
W in sock 技术就是微软公司对套接字编程结构的具体实现。
W in sock 支持两种套接字 , 他们是数据报套接字 (D atagram Socket 和流式套接字 (Stream Socket , 这两种套接字所传送的数据类型是不同的 , 因而其使用方法和相应的程序设计模型也是不同的。
本系统中采用的是流式套接字。
流式套接字可以将数据按顺序无重复的发送到目的地 , 采用的是 TCP 传输控制协议 [2]。
W in sock 网络编程有两种实现方法。
一种是直接采用 W in 32A P I 的一组套接字函数。
这种方法具有控制灵活的特点 , 但是不易于编程。
基于组态王与PLC的远程控制系统作者:赵鹏来源:《环球市场》2019年第23期摘要:近年来我国信息化行业的发展步伐不断加快,无论是影响规模还是应用范围都在迅速扩大。
而且在此影响下,我国工业逐渐步入到4.0时代,并且随着微处理技术的发展,PLC 控制系统的发展速度也进一步加快。
从刚开始的应用于工业生产领域到目前应用于社会发展的各个生产领域中,除了技术的进步与改进,还基于现代化社会发展步伐相对较快。
基于组态王与plc的远程控制系统不仅可以更好的发挥两者的优势作用,推动工作稳定、安全的生产。
但实际中因为不确定因素的影响,也在一定程度上导致其的应用效果。
接下来,本文将结合自己多年的实践工作经验,就基于组态王与PLC的远程控制系统这一问题展开具体阐述。
仅供参考。
关键词:组态王;PLC;远程控制系统;改进措施一、基于组态王与PLC的远程控制系统应用研究现状分析基于组态王与PLC的远程控制系统应用研究现状分析主要从以下两个方面展开具体阐述。
一方面,目前基于组态王与plc的远程控制系统领用领域正不断扩大,主要包括石油、电力、钢铁、化工、机械制造以及娱乐等方面,而且随着社会的发展进步,对于plc控制系统的需求力度也进一步加强。
尤其是电力以及石油等行业的发展,远程控制系统的应用不仅可以减少使用成本的投入,还可以进一步提高工作效率。
总之,组态王与plc的远程控制系统的应用有效减少了一些意外的发生。
另一方面,因为受到一些不确定因素的影响,例如目前为止我国关于远程控制系统的研究水平相对于国外来说还存在一定的差距,而且无论是从相关的理论基础还是管理体系、制度方面出发,都存在或多或少的不足。
除此之外,技术型的工作人员欠缺也成为阻碍其发展的重要因素。
二、基于组态王与PLC的远程控制系统应用中存在的问题(一)工艺操作流程复杂基于组态王与plc的远程控制系统实际应用中主要存在以下问题。
其中,首要的问题就是工资操作流程比较复杂,所以在实际工作中,组态王相对于plc的远程控制系统来说,流程是比较简单的。
1引言随着Internet的普及和远程控制策略的完善,基于Internet的远程控制成为可能。
基于公众网络(Internet)的远程控制通过廉价的TCP/IP和Ethernet连接克服了工业网络的弊端,大大降低了网络的建设与维护成本,提高了已有设备的利用效率和联合生产能力,并广泛地延伸人类的工作空间。
目前国际上已经成功地应用于远程机器人控制,满足在空间、海洋和医学显微环境中的特殊需求[3]。
Ferrel于1965就提出了在网络控制中时变的网络时延问题。
华盛顿大学的T.J.Tarn教授与K.Brady是基于Internet机器人远程控制第一人。
Wakita等人提出“智能化监视”远程机器人控制系统,指出低带宽、需求的重要性。
Bejczy等人提出远程控制中“虚拟机器人”的概念。
Kuk-Hyun Han等人进行机器人系统在KAIST 与UC Davis之间的Internet远程控制实验,使用由Java语言编制的GUI监视机器人的状态。
Ren C. Luo等人实现了简单迷宫中多障碍存在条件下机器人自动路径寻优,该实现是远程控制与智能控制两种先进控制手段的典型结合。
Rovetta等人使用优化的通讯媒介混合进行远程外科手术。
德国空间研究项目——ROTEX系统是公认的网络远程控制成功范例。
它采用多个超前Kalman滤波器作预测,1993年装备于哥伦比亚航天飞机上。
目前在国内还没有对基于Internet的网络远程控制的系统性研究[4]。
原来的基于公用电话网的远程控制系统[6],虽然实现了双向传输,但是传送/接受速率太低。
基于无线寻呼网络为基础的远程控制系统虽然传输速率较高,但只能单项传输,不能进行反馈。
公用电话网和无线寻呼网,还由于网络覆盖情况等限制,不能应用到家庭。
本文设计的基于socket和plc的远程控制系统,克服了以上两个网络的缺陷。
本文在Winsock 的基础上采用 TCP/IP 传输控制协议来完成数据的远程通信。
由于TCP/IP协议组是为跨越局域网和广域网环境的大规模互联网设计的,因此,利用因特网为传输媒介,满足了远程控制系统应用到家庭上时,对网络覆盖范围的需求。
另外,由于控制信息在因特网上传输时具有较快的速率,因此可以实现实时监控和实时控制。
本系统在因特网上还可以实现信息反馈,使系统更加稳定、健全,实现一个完整的远程控制系统。
用PLC作为本系统的可编程控制器,是因为PLC可以通过通信联网与服务器相连,实现分散控制,集中管理。
PLC内有成百上千个可供使用的编程元件,有很强的功能,可以实现非常复杂的控制功能,具有很高的性能价格比[2]。
本设计的结构图,如下图所示:客户端1客户端2 客户端3 服务器端PLC风扇热水器空调反馈信息图1-1控制系统结构图2 远程控制系统硬件部分及通信相关协议2.1 PLC简介PLC主要由CPU模块、输入模块、输出模块和编程器组成。
a. 中央处理单元(CPU)中央处理单元(CPU)是PLC的控制中枢。
它按照PLC系统程序赋予的功能接收并存储从编程器键入的用户程序和数据;检查电源、存储器、I/O以及警戒定时器的状态,并能诊断用户程序中的语法错误。
当PLC投入运行时,首先它以扫描的方式接收现场各输入装置的状态和数据,并分别存入I/O映象区,然后从用户程序存储器中逐条读取用户程序,经过命令解释后按指令的规定执行逻辑或算数运算的结果送入I/O映象区或数据寄存器内。
等所有的用户程序执行完毕之后,最后将I/O映象区的各输出状态或输出寄存器内的数据传送到相应的输出装置,如此循环运行,直到停止运行。
为了进一步提高PLC的可靠性,近年来对大型PLC还采用双CPU构成冗余系统,或采用三CPU的表决式系统。
这样,即使某个CPU出现故障,整个系统仍能正常运行。
b.输入(Input)模块和输出模块(Output)输入(Input)模块和输出模块(Output)简称为I/O模块,是联系外部现场设备和CPU模块的桥梁。
输入模块用来接收和采集输入信号,开关量输入模块用来从按钮、选择开关、数字拨码开关、限位开关、接近开关、压力继电器等来的开关量输入信号。
模拟量输入模块用来接收电位器,测速发动机和各种变送器提供的连续变化的模拟量电流电压信号。
开关量输出模块用来控制接触器、电磁阀、指示灯数字显示装置和报警装置等输出设备,模拟量输出模块用来控制调节阀,变频器等执行装置[5]。
c.编程器编程器用来生成用户程序,用它来进行编辑、检查、修改和监视用户程序的执行情况。
使用编程软件可以在计算机的屏幕上直接生成和编辑梯形图和指令表程序,并可以实现不同编程语言之间的互换。
程序被编译后下载到PLC,也可以将PLC中的程序上传到计算机。
2.2 RS-232C协议RS-232-C是美国电子工业协会EIA(Electronic Industry Association)制定的一种串行物理接口标准。
RS是英文“推荐标准”的缩写,232为标识号,C表示修改次数。
RS-232-C总线标准设有25条信号线,包括一个主通道和一个辅助通道。
在多数情况下主要使用主通道,对于一般双工通信,仅需几条信号线就可实现,如一条发送线、一条接收线及一条地线。
RS-232-C标准规定的数据传输速率为每秒50、75、100、150、300、600、1200、2400、4800、9600、19200波特。
RS-232-C标准规定,驱动器允许有2500pF的电容负载,通信距离将受此电容限制,例如,采用150pF/m的通信电缆时,最大通信距离为15m;若每米电缆的电容量减小,通信距离可以增加。
传输距离短的另一原因是RS-232属单端信号传送,存在共地噪声和不能抑制共模干扰等问题,因此一般用于20m以内的通信。
一般个人计算机上会有两组 RS-232 接口,分别称为 COM1 和 COM2。
2.3 TCP/IP协议TCP/IP(传输控制协议/网际协议)是互联网中的基本通信语言或协议。
在私网中,它也被用作通信协议。
当用户直接网络连接时,用户的计算机应提供一个TCP/IP 程序的副本,此时接收所发送的信息的计算机也应有一个TCP/IP程序的副本。
TCP/IP是一个两层的程序。
高层为传输控制协议,它负责聚集信息或把文件拆分成更小的包。
这些包通过网络传送到接收端的TCP层,接收端的TCP层把包还原为原始文件。
低层是网际协议,它处理每个包的地址部分,使这些包正确地到达目的地。
网络上的网关计算机根据信息的地址来进行路由选择。
即使来自同一文件的分包路由也有可能不同,但最后会在目的地汇合。
TCP/IP使用客户端/服务器模式进行通信。
TCP/IP通信是点对点的,意思是通信是网络中的一台主机与另一台主机之间的。
TCP/IP与上层应用程序之间可以说是“没有国籍的”,因为每个客户请求都被看做是与上一个请求无关的。
正是它们之间的“无国籍的”释放了网络路径,才是每个人都可以连续不断的使用网络。
许多用户熟悉使用TCP/IP协议的高层应用协议。
包括万维网的超文本传输协议(HTTP),文件传输协议(FTP),远程网络访问协议(Telnet)和简单邮件传输协议(SMTP)。
这些协议通常和TCP/IP协议打包在一起。
使用模拟电话调制解调器连接网络的个人电脑通常是使用串行线路接口协议(SLIP)和点对点协议(P2P)。
这些协议压缩IP包后通过拨号电话线发送到对方的调制解调器中。
与TCP/IP协议相关的协议还包括用户数据报协议(UDP),它代替TCP/IP协议来达到特殊的目的。
其他协议是网络主机用来交换路由信息的,包括Internet控制信息协议(ICMP),内部网关协议(IGP),外部网关协议(EGP),边界网关协议(BGP)。
2.4客户端/服务器端(C/S)通信Client(客户端) Server (服务器端) PLC图2-1 控制信息流程图如图2-1 客户端和服务器端之间通过Internet进行通信,采用了业界标准的协议组(TCP/IP)。
因为(TCP/IP)协议组是为跨越局域网和广域网环境的大规模互联网络设计的,因此,在互联网中进行远程控制,需采用(TCP/IP)协议组[7]。
所有的网络在传输协议上都是分层的,层的集合通常称为栈。
应用程序跟最高层通话,最底层则跟网络通话。
图2-2显示了客户端和服务器端TCP/IP协议栈的结构[9],每一层在逻辑上与另一端相对应的层进行连接和通信;物理数据是从协议栈的上部传送到底部,通过网络传输到另一端协议栈的底部,然后再从栈的低端往上传送到对应的层。
图中右边是服务程序,左边是客户程序,可以把基于HTTP协议的WWW服务器程序认为是服务程序,把自己计算机上的浏览器程序认为是客户程序。
电视冰箱空调图2-2 TCP/IP 协议栈的结构2.5 服务器和PLC 之间通信PLC 与服务器的comm 端口进行通信,采用了RS-232C 串行通信方式,PLC 需安装FX 2N —232—BD 通信用功能扩展板,硬件接线如图2-3所示。
RXD ,TXD 和SG 分别是接收端、发送端和信号公共线。
TCP IP TCPIPHTTP 客户HTTP 客户 以太网驱动程序 以太网驱动程序应用层 传输层 网络层 链路层232-BD 计算机(comm)计算机和PLC 之间的数据流有三种形式:计算机从PLC 中读数据;计算机向PLC 写数据和PLC 向计算机写数据。
a.计算机读PLC 的数据计算机从PLC 中读取数据的过程分为三步:(1) 计算机向PLC 发送读数据命令。
(2) PLC 接收到命令以后,执行相应的操作,将计算机要读取的数据发送给它。
(3) 计算机在接收到相应的数据后,向PLC 发送确认响应,表示数据已经收到。
b.计算机向PLC 写数据计算机向PLC 写数据的过程分为两步:(1) 计算机首先向PLC 发送写数据命令。
(2) PLC 接收到写数据命令以后,执行相应的操作,执行完成后向计算机发送确认信号,表示写数据操作已完成。
c.PLC 发送请求式(on-demand )数据给计算机PLC 直接向上位机发送数据,计算机收到后进行相应的处理,不会向PLC 发送确认信息[8]。
RXD TXD SG RXD TXD SG图2-3 串口通信结构3 远程控制系统软件部分3.1 服务器端与客户端通信编程3.1.1 采用VC++下的MFC框架编程MFC框架定义了应用程序的轮廓,并提供了用户接口的标准实现方法。
所以我们要做的就是通过预定义的接口把具体应用程序特有的东西填入这个轮廓。
Microsoft Visual C++提供了相应的工具来完成这个工作:AppWizard可以用来生成初步的框架文件;资源编辑器用于帮助直观地设计用户接口;ClassWizard用来帮助添加代码到框架文件;最后进行编译[1]。