2009年11月电工技术学报Vol.24 No. 11 第24卷第11期TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Nov. 2009 一种开关磁阻风力发电机最大风能跟踪方法
熊立新1徐丙垠2高厚磊1Lie Xu3
(1. 山东大学电气工程学院济南 250061
2. 山东理工大学电气技术研究所淄博 255049
3. University of Strathclyde Glasgow G1 1XW)
摘要对开关磁阻风力发电机的运行原理和风轮机的功率输出特性进行了介绍,提出了一种不依赖风轮机运行参数即可实现最大风能自动跟踪的变步长控制方法。使用Matlab/Simulink构建了整个系统的模型,进行了仿真,使用直流电动机模拟风力机对提出的最大风能跟踪控制方法进行了测试,系统仿真和试验结果证明该方法是可行的。
关键词:开关磁阻发电机风力发电最大风能跟踪可变步长
中图分类号:TM352
A New Control Method of Switched Reluctance Generator for
Maximum Power Point Tracking in Wind Turbine Application
Xiong Lixin1 Xu Bingyin2 Gao Houlei1Lie Xu3
(1. Shandong University Jinan 250061 China
2. Shandong University of Technology Zibo 255049 China
3. University of Strathclyde Glasgow G1 1XW UK)
Abstract This paper presents a variable step maximum power point tracking (MPPT) algorithm for switched reluctance generator (SRG) based on wind generation system (WGS). The fundamental principle of the MPPT algorithm is based on monitoring the SRG's output power and speed to adjust the excitation phase current of SRG. The advantages of the proposed algorithm are that no knowledge of the wind turbine characteristics or measurement of the wind speed is required. The MPPT algorithm is simulated using Matlab/Simulink software, an experimental test system is developed in lab; the results of simulation and experimental test are used to prove its feasibility.
Keywords:Switched reluctance generator,wind power generation, maximum power point tracking, variable step
1引言
随着能源和环境问题的日益突出,风力发电技术成为研究的一个热点[1]。目前在现场使用的风力发电装置中,发电机一般是采用普通异步感应发电机、双馈发电机和永磁同步发电机。普通异步感应发电机的发电转速近似于恒定值,当风速变化时转速不变使得风能利用效率不能保持最优值。双馈发电机虽然能随着风速的变化改变转速,但电机结构复杂,在风轮机和发电机间需要安装增速齿轮箱,由此带来了额外的功率损失,而且增速齿轮箱的维护保养工作量大。使用永磁同步机可以省去增速齿轮箱,实现变速直驱运行;但永磁材料易退磁,影响发电效率。
开关磁阻发电机的变速运行范围宽,低速运行性能好,电机结构简单,可靠性高,电机的损耗小,运行效率高,输出为直流电,易于并网,同时可将齿轮箱省掉,提高了对风能的利用效率[2-3]。这些特点使得开关磁阻发电机非常适合用到变速直驱风力
国家自然科学基金资助项目(50807034)。收稿日期 2009-04-08 改稿日期 2009-08-06
2
电 工 技 术 学 报 2009年11月
发电系统中。自20世纪90年代以来各国学者对开关磁阻风力发电系统展开了研究,但研究仅停留在理论探讨阶段,一些工程应用的关键技术问题还没有得到很好的解决。
目前国内外针对开关磁阻风力发电系统的研究大都集中在SRG 本身的控制上,对于如何进行SRG 与风轮机的联合控制以实现系统的最大风能跟踪尚未有深入研究。现有文献中关于开关磁阻风力发电系统MPPT 的控制方法有两种,分别是风速跟踪控制法和转速反馈控制法,风速跟踪控制法是通过测量风速并查找相应风速下风轮机的功率曲线来输出最大功率,该方法需要安装风速测量装置。转速反馈控制法详见文献[1],其原理是通过对风轮机的最佳叶尖速比等参数进行计算,预先算出各转速对应的最佳功率,然后调整电机运行以跟踪最大功率。虽然该方法不需要安装风速测量装置,但仍需使用风轮机的机械参数。在实际应用中由于风轮机参数在长期运行下会有所改变,也使得计算结果越来越不准确,影响风能的利用率[1,4]。
本文针对SRG 控制灵活的特点,提出了一种利用功率扰动来对开关磁阻风力发电机进行控制以实现最大风能输出的跟踪方法。它无需安装风速测量装置,也无需知道风轮机的特征参数,具有易于实现、工作稳定的优点。
2 开关磁阻风力发电系统的构成
2.1 开关磁阻发电机的工作原理
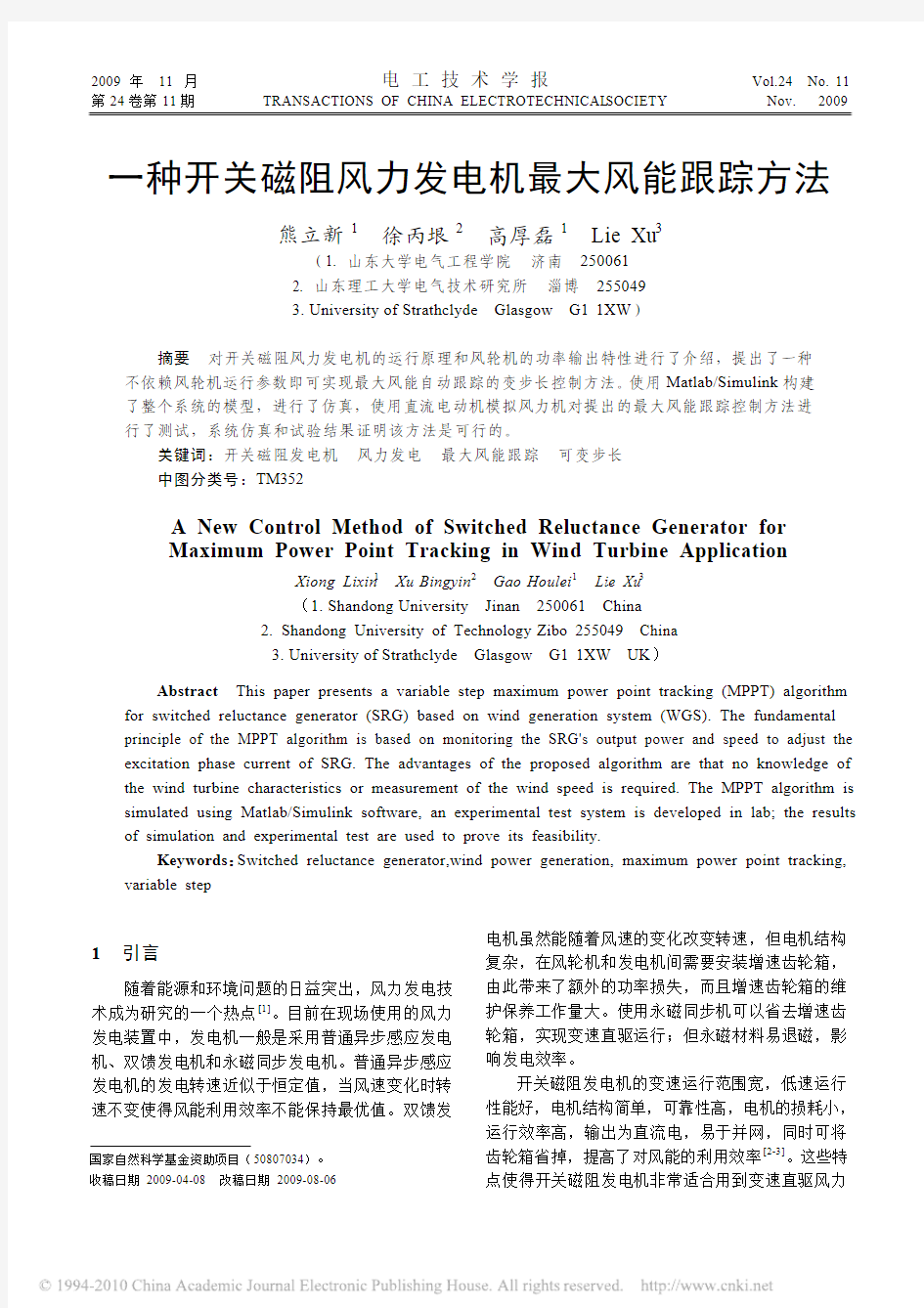
开关磁阻电机为双凸极结构,定子上设有集中绕组,转子上既无绕组也无永磁体。在线性模型下开关磁阻电机的相绕组电感随转子位置角变化的规律如图
1所示[2]。
图1 电感与转子位置角的关系 Fig.1 Phase inductance profile
据此可推导出开关磁阻电机每一相绕组产生的电磁转矩T e 和输出功率P e 为[2]
2
e e 12L
P T i ωωθ
?==? (1) 式中 i ——相绕组电流值;
L ——绕组电感值;
θ ——电机转子位置角; ω ——电机转速。
从式(1)可知电机的电磁转矩方向与绕组电流方向无关,在电感上升区即/L θ??>0时通入绕组电流则电机做电动机运行;电感下降区即/L θ??<0以前或电感刚开始下降的时候先在绕组中通入少量电流励磁,使绕组电流的续流区域大部分在电感下降区内,则电磁转矩方向与电机转动方向相反,电机做发电机运行。开关磁阻电机做发电运行时,可以通过调节励磁阶段的相绕组电流大小、绕组通断时间等来控制发电输出功率的大小[2,5]。
根据SRG 励磁电源的提供方式不同,SRG 可以有两种工作模式,即自励模式和他励模式。自励模式是指SRG 电压建立的初始瞬间,由外电源提供初始励磁,当电压达到控制所需的稳定值后,切断外电源,此后由SRG 本身发出的电压提供励磁。他励模式是指励磁回路与发电回路彼此独立,两者可以独立调节,但控制线路复杂。本文所说的SRG 均工作在自励状态。
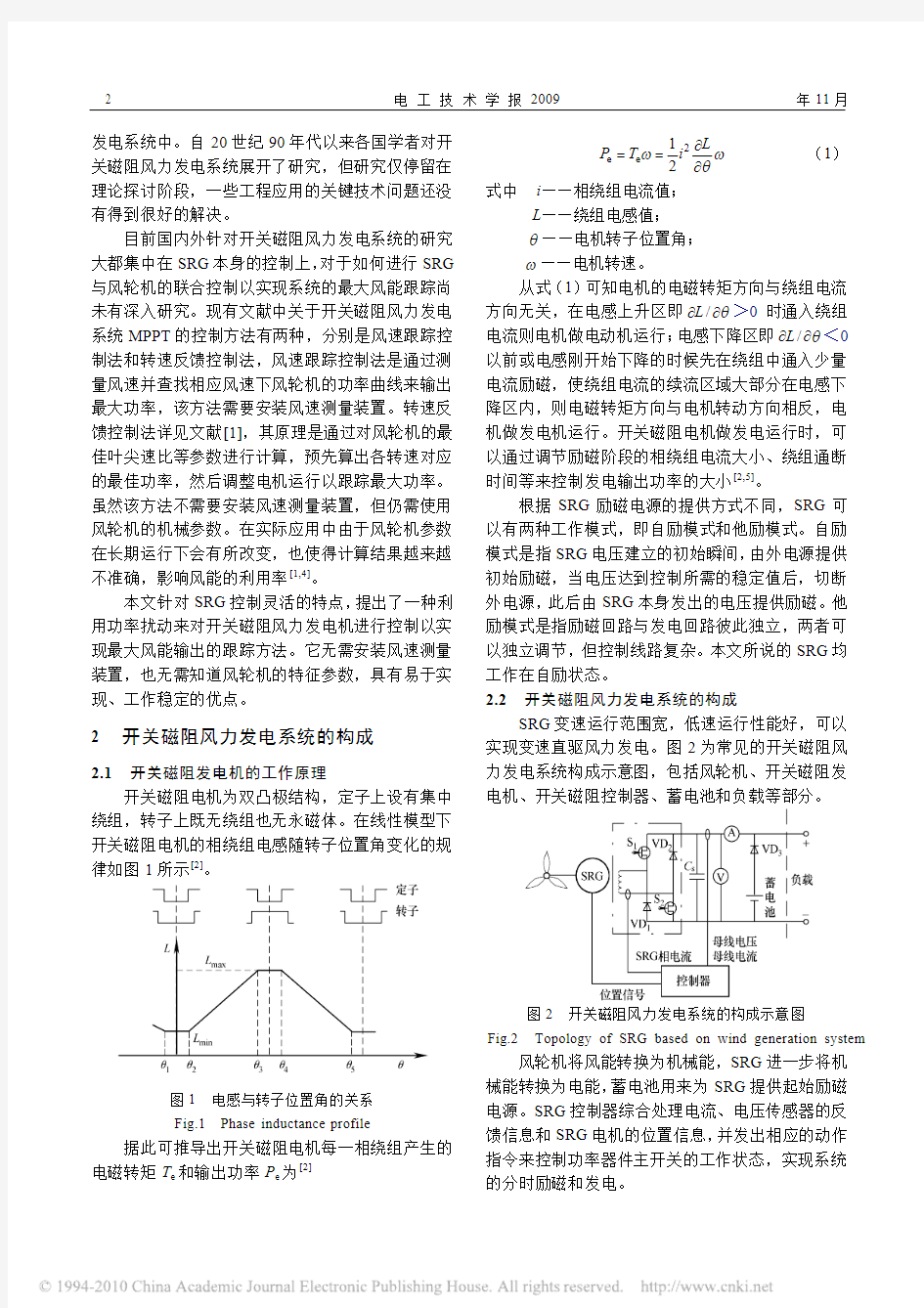
2.2 开关磁阻风力发电系统的构成
SRG 变速运行范围宽,低速运行性能好,可以实现变速直驱风力发电。图
2为常见的开关磁阻风力发电系统构成示意图,包括风轮机、开关磁阻发电机、开关磁阻控制器、蓄电池和负载等部分。
图2 开关磁阻风力发电系统的构成示意图 Fig.2 Topology of SRG based on wind generation system
风轮机将风能转换为机械能,SRG 进一步将机械能转换为电能,蓄电池用来为SRG 提供起始励磁电源。SRG 控制器综合处理电流、电压传感器的反馈信息和SRG 电机的位置信息,并发出相应的动作指令来控制功率器件主开关的工作状态,实现系统的分时励磁和发电。
第24卷第11期
熊立新等 一种开关磁阻风力发电机最大风能跟踪方法 3
3 开关磁阻风力发电机控制方法
3.1 风轮机的功率特性
根据贝兹证明,风轮机从风能吸收的功率为
3P 1
2
P C A v ρ= (2)
式中 C P ——风轮机的功率系数,是叶尖速比和桨
叶节距角的函数; A ——风轮机扫掠面积;
ρ ——空气密度; v ——风速。
在桨叶节距角一定时,风轮机的功率-转速特性曲线如图3所示。
图3 风轮机功率-转速特性
Fig.3 Power-speed characteristics of wind turbine
从图3中可以看出当风速固定时,风轮机只有在某一转速下运行才可以输出最大功率,偏离此点风轮机输出功率都会减小。各风速对应的最佳功率点的连线P opt 即最佳功率曲线,欲使风轮机的工作点符合最佳功率曲线,必须在风速变化时及时调整风轮机的转速,保持最佳叶尖速比[6]。 3.2 开关磁阻风力发电机的控制方法
SRG 控制器通过检测母线的电压、电流可以计算出输出功率。由式(1)可知,改变SRG 的励磁电流即可改变SRG 的输出功率,本文基于此提出了一种MPPT 控制方法,其基本原则是通过检测SRG 的功率、转速在励磁电流扰动下的变化情况从而来决定下一步的励磁电流变化方向。假设在k 时刻系统运行稳定,控制器给SRG 的励磁电流增加一个扰动量,在k +1时刻控制器计算出SRG 的输出功率和转速后同k 时刻的值进行比较,如果SRG 输出功率增加,说明这个扰动量的方向是正确的,如果检测到转速增加,表明当前风轮机的机械功率大于SRG 的输出功率,这两种情况下控制器都需要在k +1时刻继续增加励磁电流,增大SRG 输出功率。如果k +1时刻检测到SRG 的输出功率和转速比k 时刻的值都有所减小,则励磁电流应该反方向变化,减小
SRG 的输出功率。下面分别按照风速固定和风速变化两种情况对MPPT 控制方法的工作过程进行阐述。
风速固定时,风力发电系统的功率-转速变化关系如图4
所示。
图4 风力发电系统中功率-转速变化关系 Fig.4 Relationship of variables in a wind
generation system
控制器在k 时刻施加扰动电流,如果在k +1时刻检测到SRG 的功率增加,转速减小,表明目前系统工作在功率转速曲线的高速区,且工作点正沿着
功率转速曲线向最大功率点移动,因此在k +1时刻应增加励磁电流,以进一步增大SRG 输出功率。如果k +1时刻检测到SRG 的功率减小,转速增加,表明目前系统工作在功率转速曲线的高速区,且工作点正沿着功率转速曲线远离最大功率点,由于此时转速在增加,说明风轮机的机械输出功率大于SRG 的输出功率,因此在k +1时刻也应增加励磁电流。
与之类似,如果k +1时刻检测到SRG 的功率增加,转速增加,表明目前系统工作在功率转速曲线的低速区,且工作点正沿着功率转速曲线向最大功率点移动,由于转速在增加,风轮机的机械输出功率大于SRG 输出功率,因此k +1时刻需要增加励磁电流。如果k +1时刻SRG 输出功率减小,转速减小,表明目前系统工作在功率转速曲线的低速区,且工作点正沿着功率转速曲线远离最大功率点,在k +1时刻应迅速减小励磁电流从而减小SRG 输出功率,以保证风轮机的机械输出功率大于SRG 的输出功率,使转速增加,工作点向最大功率点移动。如果此时SRG 输出功率减小缓慢,则由于风轮机转速减小,机械功率也减小,转速会进一步减小,进入不稳定状态。本文提出的跟踪方法为了避免这种情况,使用了“缓慢增加,快速减小”的策略来控制励磁电流的变化,即励磁电流需要增加时每次增加一个比较小的值,需要减小时则每次减小一个较大的值。
风速变化时MPPT 控制方法的工作过程可参考图5进行说明。
4
电 工 技 术 学 报 2009年11月
图5 风速变化时MPPT 控制方法工作过程 Fig.5 MPPT work route when the wind speed varied
假设初始风速为v 1,在MPPT 控制方法的作用下系统最终运行在A 点,如果k 时刻风速由v 1增加到v 3,根据图5可知风轮机在B 点运行时输出的机械能会增加,则SRG 的输出功率和转速都会增加,在k +1时刻应增加励磁电流从而增大SRG 输出功率。风轮机在风速固定为v 3后在MPPT 控制方法的作用下系统运行点由B 点逐渐稳定至C 点,实现最大功率输出。如果运行中风速减小,即k 时刻风速由v 3减小到v 2,
根据图5可知D 点的机械能小于C 点的机械能,如果此时不迅速减小SRG 的输出功率,则风轮机转速会逐渐减小,运行点会进入风速v 2的低速区即E 点左侧,有可能出现不稳定状态,因此k 时刻风速减小即发现SRG 转速和功率减小时,k +1时刻应迅速减小励磁电流从而减小SRG 输出功率,直到风轮机输出的机械功率大于SRG 的输出功率,风轮机开始加速运行为止,此后由于转速或者功率增加,可以缓慢增加SRG 输出功率,最终系统在MPPT 控制下逐渐稳定到E 点。
下表综合表示了风速固定和风速变化时MPPT 控制方法根据SRG 输出功率和转速的变化情况应该采取的策略。
表 功率和转速变化情况下SRG 的控制策略 Tab. Control strategy of SRG according to ?p and ?n
?p e (k +1) ?n (k +1) i (k +1) 增加↑ 减小↓ 缓慢增加 减小↓ 增加↑ 缓慢增加 减小↓ 减小↓ 快速减小 增加↑
增加↑
缓慢增加
e e e (1)(1)(),(1)(1)()p k p k p k n k n k n k ?+=+??+=+?分别表示系统在k +1时刻的功率、转速值与k 时刻
功率、转速值比较时的变化量,i (k +1)表示k +1时刻的励磁电流应该采取的动作。
MPPT 控制方法的使用效果与扰动时间间隔即k 时刻到k +1时刻的时间长短以及每一次扰动时使用的扰动电流?i (k )的大小有关。目前扰动时间间隔
的选择主要根据风轮机机械惯量、系统输出功率等进行选择[7-8]。
现有文献中使用的扰动电流?i (k )大小也是固定的,在实际使用中如果参数过大,则在最大功率点附近振荡厉害,如果参数过小,虽然可以减缓功率振荡的幅度,但达到最大功率点的时间变长,对于风速的变化响应慢[9-10]。由图4可见风轮
机的功率-转速特性曲线是凸函数,其斜率d p /d n 在最大功率点处为零,因此本文提出的MPPT 控制方法根据功率-转速曲线的斜率值来调整扰动电流的步长,使得系统运行点在远离最大功率点时使用较大的步长,接近最大功率点时使用较小的步长,以减小振荡幅度,提高响应速度。
综上,本文提出的开关磁阻风力发电机MPPT 控制方法可以用数学公式表达为
(1)()(1)i k i k i k +=+?+ (3) e e e (1)(1)0(1)0(1)(1)
|()|(1)0(1)0
p k K p k n k i k n k m i k p k n k ?
???+?+?+??+=?+?????+?+?
(4)
min I ≤(1)i k ?+≤max I (5)
式(4)表明在k +1时刻如果励磁电流需要增加,则增加的值为k +1时刻与k 时刻比较得出的功率-转速曲线斜率值的倍数,如果励磁电流需要减小,则减小的值为k 时刻励磁电流变化值的m 倍,m ≥3以确保励磁电流能快速减小。式(5)是为了避免电流变化太大而增加的限制条件,I min 和I max 分别是励磁电流变化的最小值和最大值。
应用中为了避免出现风电系统在风速稳定时长时间进行小步长扰动搜索的情况,可以通过检测d p /(d n )的符号变化和d p /(d n )值的大小来进行判断,以停止扰动搜索。如果d p /(d n )长时间在正、负号间来回波动且一直满足|d p /(d n )|≤ε,说明目前的工作点在最大功率点附近波动,可以停止电流扰动,将功率稳定在某一值上,直到功率或者转速有变化时则开始重新扰动搜索,跟踪风能变化。
4 系统模型和仿真
4.1 开关磁阻风力发电系统的建模
在Simulink 中建立开关磁阻风力发电系统模型,模型中的MPPT 模块是根据本文提出的MPPT 控制方法设计的,用来实现对SRG 励磁电流的控制。SRG 模块是基于Simulink 软件自带的开关磁阻电机模型,使用时设置SRG 为3相6/4极结构,开通角和关断角固定为1°和40°。仿真时使用24V
≥≥<<
第24卷第11期熊立新等一种开关磁阻风力发电机最大风能跟踪方法 5
电源串联二极管对SRG进行初始励磁,母线电容值为6800μF。
使用Simulink库中的Wind Turbine模块模拟风轮机,桨叶节距角固定为0°,设置基础风速为10m/s,额定输出功率为60kW,设置完毕后风轮机的功率-转速特性如图6所示。
图6 风轮机输出特性示意图
Fig.6 Wind turbine characteristics
4.2 仿真结果
Simulink仿真环境设置为T s=1e? 6,整个仿真时间为16s。MPPT的扰动间隔为0.1s,m值为3。风速从8m/s到11m/s变化,仿真波形如图7所示,图中的理想曲线均为Simulink中风轮机模块在相应风速下输出最大功率时的理论运行值。
(a)风速变化曲线
(b)风轮机机械能输出理想曲线及实际输出曲线
(c)风轮机机械能理想曲线与SRG实际输出功率曲线
(d)风轮机与SRG理想转速及实际转速曲线
图7 最大风能跟踪控制方法仿真结果示意图
Fig.7 Simulation results of MPPT algorithm
仿真开始时,风速为8m/s,SRG在转速超过200r/min后开始发电,经MPPT跟踪达到最大功率点的时间约为2s。风速在4s、8s和12s时分别进行了变化,仿真表明在风速稳定后1s内系统可以实现最大风能跟踪,输出最大功率。
5试验结果
在实验室中使用直流电动机、SRG等模拟开关磁阻风力发电系统,以进一步对提出的MPPT控制方法进行验证。实验系统框图如图8所示。
图8 开关磁阻风力发电实验系统框图Fig.8 Block diagram of experimental test system
所用直流电动机为37kW/(3000r/min),SRG 为7.5kW/(1500r/min),3相12/8结构,负载固定为28?。在PC机上输入欲模拟的风力曲线后,PC 机读取测功机的转速、转矩值再通过控制器来调整直流电动机的运行,使其运行特性符合风轮机曲线。本次试验模拟了v1、v2两种风速的运行情况,v1<v2。图9为风速v1时的转矩、功率曲线,风速v2的曲线特性与此类似,不再列出。
图9 风速v1时的转矩、功率曲线示意图Fig.9 Torque-speed and power-speed curves of wind
turbine when the wind speed is v1
6 电工技术学报 2009年11月
风速固定为v1时,使用MPPT控制方法对风力发电系统进行控制,图10分别为实验时的转速变化曲线、SRG输出功率变化曲线和风轮机输出功率变化曲线,图中的理想值曲线为所模拟的风轮机在风速v1时输出最大功率的运行曲线。
(a)SRG理想转速及实际转速曲线
(b)SRG输出功率变化曲线
(c)风轮机输出功率理想曲线及实际曲线
图10 风速v1时MPPT跟踪实验结果示意图Fig.10 Experimental results of proposed MPPT algorithm
when the wind speed fixed
图11为风速变化时模拟系统使用本文提出的MPPT控制方法进行功率跟踪时的参数变化曲线,图中的理想值曲线为所模拟的风轮机在相应风速下输出最大功率时的运行曲线。实验起始时刻风速为v1,并且SRG已实现最大功率跟踪控制,在10s时风速升至v2,30s后风速又降至v1。
实验结果表明在风速上升、下降、稳定时开关磁阻风力发电机使用本文提出的MPPT控制方法都可以实现最大风能跟踪,输出最大功率。
由于实验条件限制,在使用直流电动机模拟风轮机时未能充分考虑风轮机的转动惯量及模拟系统的转动惯量,使得风轮机模拟系统的动态响应远高于实际风力系统,造成MPPT跟踪过程中系统转速振荡偏大。本实验主要是为了验证MPPT跟踪策略是否正确,从整个模拟系统的实验结果来看,这种误差是可以接受的。
(a)SRG理想转速及实际转速曲线
(b)SRG输出功率变化曲线
(c)风轮机输出理想曲线及实际曲线
图11 风速变化时MPPT跟踪实验结果示意图
Fig.11 Experimental results of proposed MPPT algorithm
when the wind speed changed
6 结论
本文针对开关磁阻风力发电系统的特点,提出
了一种功率扰动的控制方法来实现最大风能跟踪。
该方法通过检测SRG的输出功率和转速的变化对
励磁电流进行调整以实现风能跟踪,无需安装风速
测量装置,也无需知道风轮机的功率特性曲线,易
于现场应用。
参考文献
[1] 胡海燕, 潘再平. 开关磁阻风电系统最大风能追踪
控制[J]. 太阳能学报, 2005, 26(6): 787-791.
Hu Haiyan, Pan Zaiping. The maximal wind-energy
tracing control of switched reluctance generator
wind-power generation system[J]. Acta Energiae
Solaris Sinica, 2005, 26(6): 787-791.
[2] David A Torrey. Switched reluctance generators and
their control[J]. IEEE Trans. on Ind. Electron., 2002,
49(1): 3-14.
[3] Mueller M A. Design of low speed switched
reluctance machines for wind energy converters[C].
Ninth International Conference on Electrical
第24卷第11期熊立新等一种开关磁阻风力发电机最大风能跟踪方法 7
Machines and Drives, 1999: 60-64.
[4] Roberto C, Ruben P, Marcelo P. Control of a switched
reluctance generator for variable-speed wind energy
applications[J]. IEEE Trans. on Energy Convers.,
2005, 20(4): 781-791.
[5] 张慧, 潘再平. 开关磁阻发电机励磁模式的理论研
究与仿真[J]. 太阳能学报, 2004, 25(2):162-170.
Zhang Hui, Pan Zaiping. Theoretic analysis of
excitation strategy and simulation of switched
reluctance generators[J]. Acta Energiae Solaris Sinica,
2004, 25(2):162-170.
[6] Esmaili R, Xu L, Nichols D. A new control method of
permanent magnet generator for maximum power
tracking in wind turbine application[C]. IEEE
PESGM’05, 2005(3): 2090-2095.
[7] Cardenas R, Ray W. Power limitation in variable
speed wind turbines with fixed pitch angle[C].
International Conference on Electric Power
Generation, 1996: 44-48.
[8] Iordanis K, Christos M. Optimal efficiency control of
switched reluctance generators[J]. IEEE Trans. on
Power Electron., 2006, 21(4):1062-1072.
[9] Jia Y, Yang Z, Cao B. A new maximum power point
tracking control scheme for wind generation[C].
Proceedings of International Conference on Power
System Technology, 2002:144-148.
[10] Eftichios K, Kostas K. Design of a maximum power
tracking system for wind-energy-conversion applications[J]. IEEE Trans. on Ind. Electron., 2006,
53(2): 486-494.
作者简介
熊立新男, 1976年生, 博士研究生, 研究方向为分布式发电的运
行控制。
徐丙垠男, 1961年生, 教授, 博士生导师, 主要从事电力线路故
障监测、配电网自动化及开关磁阻电机等的研究。
更 正 启 事
《电工技术学报》2009年第10期第71页文章作者单位有变动,现更正如下。
原来为:
温春雪1,2李建林1朱晓光1许洪华1
(1. 中国科学院电工研究所北京 100190
2. 中国科学院研究生院北京 100049)
Wen Chunxue1,2 Li Jianlin1 Zhu Xiaoguang1 Xu Honghua1
(1. Institute of Electrical Engineering Chinese Academy Sciences Beijing 100190 China
2. Graduate Unversity of Chinese Academy of Sciences Beijing 100049 China)
现更正为:
温春雪1李建林2朱晓光2许洪华2
(1. 北方工业大学机电工程学院北京 100144
2. 中国科学院电工研究所北京 100190)
Wen Chunxue1 Li Jianlin2 Zhu Xiaoguang2 Xu Honghua2
(1. North China University of Technology Beijing 100144 China
2. Institute of Electrical Engineering Chinese Academy of Sciences Beijing 100190 China)
开关磁阻电机驱动系统的运行原理及应用(二) (低轴阻发电机参考资料) 1 引言 开关磁阻电机驱动系统(SDR)具有一些很有特色的优点:电机结构简单、坚固、维护方便甚至免维护,启动及低速时转矩大、电流小;高速恒功率区范围宽、性能好,在宽广转速和功率访问内都具有高输出和高效率而且有很好的容错能力。这使得SR电机系统在家用电器、通用工业、伺服与调速系统、牵引电机、高转速电机、航空航天等领域得到广泛应用。 SR电机是一种机电能量转换装置。根据可逆原理,SR电机和传统电机一样,它既可将电能转换为机械能—电动运行,在这方面的理论趋于成熟;也可将机械能转换为电能—发电运行,其内部的能量转换关系不能简单看成是SR电动机的逆过程。本文将从SR电机电动和发电运行这两个角度阐述SR电机的运行原理。 2 电动运行原理 2.1 转矩产生原理 控制器根据位置检测器检测到的定转子间相对位置信息,结合给定的运行命令(正转或反转),导通相应的定子相绕组的主开关元件。对应相绕组中有电流流过,产生磁场;磁场总是趋于“磁阻最小”而产生的磁阻性电磁转矩使转子转向“极对极”位置。当转子转到被吸引的转子磁极与定子激磁相相重合(平衡位置)时,电磁转矩消失。此时控制器根据新的位置信息,在定转子即将达到平衡位置时,向功率变换器发出命令,关断当
前相的主开关元件,而导通下一相,则转子又会向下一个平衡位置转动;这样,控制器根据相应的位置信息按一定的控制逻辑连续地导通和关断相应的相绕组的主开关,就可产生连续的同转向的电磁转矩,使转子在一定的转速下连续运行;再根据一定的控制策略控制各相绕组的通、断时刻以及绕组电流的大小,就可使系统在最隹状态下运行。 图1 三相sr电动机剖面图 从上面的分析可见,电流的方向对转矩没有任何影响,电动机的转向与电流方向无关,而仅取决于相绕组的通电顺序。若通电顺序改变,则电机的转向也发生改变。为保证电机能连续地旋转,位置检测器要能及时给出定转子极间相对位置,使控制器能及时和准确地控制定子各相绕组的通断,使srm能产生所要求的转矩和转速,达到预计的性能要求。 2.2 电路分析
开关磁阻发电系统工作原理和控制方案 开关磁阻发电系统由双凸极磁阻电机、双向功率变换器、转子位置检测器(或非直接位置检测器)和控制器组成。发电控制系统根据电机的位置检测器产 生的转子位置信号控制功率开关电路中开关管的通断,改变相电流的生成位置,使电磁转矩为负,使机械能转化为电能。电机为12/8结构,转子上无绕组,定子每个齿极上设有一个集中线圈,径向相对的两个线圈形成一对磁极,称为一相。这样共组成6相,可满足双通道开关磁阻发电系统的需要。本研究以单通道为例,简要阐述其工作原理和控制方法。 开关磁阻发电机工作状态电流波形如图1所示。图1中,θ角定义为该相转子齿槽轴线与定子齿极轴线之间的夹角。当转子槽轴线重合时,该相电感最小(定义为θ=0°),当转子齿极轴线与相应定子齿极轴线重合(定义θ=θm)时,该相电感最大。根据电磁场基本理论,伴随磁场的存在,电机转子的电磁转矩同时存在,可以表示为: 若在电感下降区形成电流,产生负转矩,即电机吸收机械能,并可能把它转换成电能输出,故此时开关磁阻电机为发电机工作。 开关磁阻电机控制参数较多,控制灵活,这也是开关磁阻电机的优点之一。对于开关磁阻发电系统有3种常用的控制方案:脉宽调制控制、角度位置控制和电流斩波控制。本研究设计的控制系统运用的是角度位置控制方案。根据图 1中相电流波形可知,θ1和θ2分别为开通角和关断角,即主开关管开通和关断时对应的转子位置角度,对其进行调节可影响发电的励磁过程及相电流。通常开通角θ1在θm之前即在电感上升区,关断角θ2 在θm之后即在电感下降区,开通角提前、关断角推后都可以增加励磁时间、增大励磁电流ic,从而加大励磁强度。角度控制的优点是电机转矩调节范
最大风能捕获原理:最大风能捕获有3 种控制算法:最佳叶尖速比法、功率反馈法和爬山法。 最佳叶尖速比控制要求实时测量风速和发电机转速,通过计算使风力机工作于最佳尖速比;然而,由于风速的多变性,增加了测量成本和控制复杂度。 功率反馈法是利用矢量变换原理,通过对双馈电机转子励磁的幅值和频率进行调节,改变电机转速,实现最大风能追踪。该方法虽可避免对风速的测量,但操作之前必须根据实际情况设定风力机最佳叶尖速比,且其控制精度取决于系统快速性和定子有功功率的计算。 爬山法是通过实时检测风力机转速和输出功率,利用数学模型使电机工作于最大功率点,该方法的局限性在于:捕获最大功率点需要几百s 的时间,出现这一延迟严重影响了控制精度。 当风机运行在额定风速以下时其功率输出完全取决于桨叶的气动性能。采用转速控制方式,根据风速的大小,用风速变化稳定的低频分量,配合变频器对发电机进行控制,使风机运行在最佳尖速比情况下。当风速达到或超过额定风速后,风力发电机组进入额定功率状态。在传统的变桨矩控制方式中,这时将转速控制切换到功率控制,变桨矩系统开始根据发电机的功率信号进行控制。控制信号的给定值是恒定的,即额定功率。功率反馈信号与给定值进行比较,当功率超过额定功率时,桨叶节矩就向面积减小的方向转动一个角度,反之则向迎风面积增大的方向转动一个角度。
风力机将捕获的风能以机械能的形式驱动永磁发电机,而永磁发电机的转速随着风速的变化而变化,因而发出的电能是电压和频率都变化的电能,为得到恒压恒频的电能就必须进行交直交变流,再通过滤波器滤波将逆变器输出变换成正弦波输出。永磁同步风力发电系统不需要励磁装置,具有重量轻、效率高、可靠性好的优点。风轮机可以和永磁发电机直接耦合,省去了其他风力发电系统中的增速箱,减少发电机的维护工作而且降低噪声。PWM整流器可提供几乎为正弦的电流,因而减少了发电机侧的谐波电流。直流环节并有大电容,可维持电压恒定。电网侧串联电感可用于滤波。通过控制系统的控制,将永磁电机发出的变频 变幅值电压转化为可用的恒频电压,并达到俘获最大风能的目的。
第31卷 第4期 2008年8月 电子器件 Chinese J ournal Of Elect ron Devices Vol.31 No.4Aug.2008 Study T echnology of Maximum Pow er Point T racker on the Solar Cell 3 YA N G Fan 3 ,P EN G Hong 2w ei ,H U W ei 2bi n g ,L I Guo 2pi ng ,J I A N G Yan (College of Elect ronic and I nf ormation Engineering ,W uhan I nstit ute of Technology ,W uhan 430073,Chi na ) Abstract :Outp ut characteristic of t he solar battery in p hotovoltaic power 2generation system and t he princi 2ple of Maximum Power Point Tracker are int roduced.Bot h t he merit s and flaws of several t racing met hods in common usage are analysed.The emp hasis of t he st udy is Maximum Power Point Tracker based on quadratic interpolation.A system is designed to ascertain t he maximum power outp ut (M PO ),which is based on regular empirical approach and t he quadratic interpolation.The result of t he test indicates t hat t he M PO of solar battery can be ascertained very soon in t he quadratic interpolation.K ey w ords :solar cell ;quadratic interpolation ;Maximum Power Point Tracker EEACC :8250 太阳能电池最大功率点跟踪技术探讨 3 杨 帆3,彭宏伟,胡为兵,李国平,姜 燕 (武汉工程大学电气信息学院,武汉430074) 收稿日期:2007208220 基金项目:湖北省教育厅基金资助(20060271)作者简介:杨 帆(19662),女,硕士,硕士生导师,教授,主要研究方向为智能仪器与测控技术,yangfan188@https://www.doczj.com/doc/5b13142761.html,. 摘 要:介绍了光伏发电系统太阳能电池的输出特性及最大功率点跟踪技术的基本原理。分析了多种常用的跟踪方法的优 缺点。重点研究了二次插值法的最大功率点跟踪技术。并设计了一个系统,应用常规实验方法及二次插值法寻找太阳能电池的最大输出功率,试验结果表明二次插值法能快速寻找太阳能电池的最大输出功率。 关键词:太阳能电池;二次插值;最大功率点跟踪 中图分类号:TP331 文献标识码:A 文章编号:100529490(2008)0421081204 太阳能作为绿色能源,具有无污染,无噪音,取之不尽,用之不竭等优点,越来越受到人们的关注。由于光伏系统目前的主要问题是电池的转换效率低且价格昂贵,因此,如何进一步提高太阳能电池的转换效率,如何充分利用光伏阵列转换的能量,一直是光伏发电系统研究的重要方向。太阳能光伏发电系统的最大功率点跟踪控制M PP T (Maximum Power Point Tracker )就是其中一个重要的研究课题。 最大功率点跟踪是太阳能并网发电中的一项重要的关键技术,它是指,为充分利用太阳能,控制改变太阳能电池阵列的输出电压或电流的方法,使阵列始终工作在最大功率点上,根据太阳能电池的特性,目前实现的跟踪方法主要有以下三种:太阳追踪、最大功率点跟踪或两种方法综合使用。出于经 济方面的考虑,在小规模的系统中经常使用最大功率点跟踪的方法[1]。M PP T 能使太阳能电池阵列的输出功率增加约15%~36%。 1 太阳能电池的伏安特性分析 太阳能电池的伏安(p 2u )特性如图1所示,图1(a )为温度变化时的p 2u 特性曲线,图1(b )是日照强度变化时的p 2u 特性曲线。从图可以看出太阳能电池具有明显的非线性。太阳能电池的输出受日照强度、电池结温等因素的影响。当结温增加时,太阳能电池的开路电压下降,短路电流稍有增加,最大输出功率减小;当日照强度增加时,太阳能电池的开路电压变化不大,短路电流增加,最大输出功率增加。在一定的温度和日照强度下,太阳能电池具有唯一
光伏电池及其最大功率点跟踪 1光伏电池 1.1 光伏电池简介 太阳能电池是一种由于光生伏特效应而将太阳光能即时转化为电能的器件。当太阳光照在半导体p-n结上,由于吸收了光子的能量,会形成电子--空穴对,在p-n结电场的作用下,空穴由n区流向p区,电子由p区流向n区,这使得相应区域的主载流子的浓度在靠近p-n结部分增加,而这种局部浓度的增加必然使得主载流子朝着外部接触面的方向扩散,导致外部端子上产生电压,接通电路后就形成电流。单体的单晶硅光伏电池的输出电压在标准照度下只有0.5V左右,常见的单体电池输出功率一般在1W左右,一般不能直接作为电源使用。单体电池除了容量小以外,其机械强度也较差。因此在实际应用中,将若干光伏电池单体串并联并封装起来成为有比较大的输出功率(几瓦到几百瓦不等)的太阳能电池组件。光伏电池组件再经过串并联就形成了光伏电池阵列,可以作为大型光伏并网逆变器的功率输入。
图2.1 太阳能电池单体、组件、方阵示意图 1.2 光伏电池数学模型 光伏电池的数学模型[12]可以由图2.2所示的单二极管等效电路[13]来描述。 图中L R 为光伏电池的外接负载,负载电压为L U ,负载电流为L I 。s R 和sh R 为光伏电池内阻。s R 为串联电阻,通常阻值较小,取决于体电阻、接触电阻、扩散电阻以及电极电阻等;sh R 为旁路电阻,一般阻值较大,取决于电池表面污染和半导体晶体缺陷引起的边缘漏电以及耗尽层内的复合电流等。VD I 为通过p-n 结的总扩散电流。sc I 代表光子在光伏电池中激发的电流,取决于辐照度、电池面积和本体温度T 。
L I L 图2.2 光伏电池的单二极管等效电路 )1(0-=AKT qE D VD e I I (2.1) 式中0D I 为光伏电池在无光照时的饱和电流。 旁路电阻两端电压s L L sh R I U U +=,流过旁路电阻的电流为 ()sh s L L sh R R I U I /+=。 由以上各式可得负载电流为: sh s L L AKT R I U q D sc L R R I U e I I I s L L +-???? ??--=+1) (0 (2.2) 一般s R 很小,sh R 很大,可以忽略不计。可得理想光伏电池特性: )1(0--=AKT qU D sc L L e I I I (2.3) 由式2.3可得 ??? ? ??+-=1ln 0D L sc L I I I q AKT U (2.4)
如何利用分布式最大功率点跟踪系统提高光伏系统效率 太阳能是市场上最有前景的可再生能源之一。由于政府推出激励政策和传统电力成本不断攀升的影响,越来越多的家庭开始转向太阳能,并在屋顶安装光伏(PV)系统。按照目前的光伏系统价格计算,用户通常在 7-8 年后才能获得投资回报。政府激励政策和光伏系统的使用寿命必须能持续 20 年或更久。太阳能光伏系统的投资回报取决于该系统每年的发电量,因此用户需要的光伏系统必须具备高效、可靠和易于维护等特性,从而可以获得最大限度的发电量。 如今,很多安装太阳能光伏系统的用户已经意识到部分或间歇性的遮蔽会影响到系统的发电量。 部分阴影遮蔽对太阳能光伏系统的影响: 当树木、烟囱或其他物体投射的阴影遮挡住光伏系统时,就会导致系统造成“失配”问题。即使光伏系统只受到一点点阴影的遮挡都会导致发电量的大幅下跌。部分遮蔽导致的系统失配对发电量的实际影响很难通过简单的计算公式获得。因为影响系统发电量的因素很多,包括内部电池模块间互连、模块定向、光伏电池组间的串并联问题以及逆变器的配置等。光伏模块通过多个电池串相互连接而成,每个电池串被称为一个“组列”。每个组列由一个旁路二极管来保护,以免一个或多个电池被遮蔽或损坏时导致整个电池串因为过热而受到损坏。这些串联或并联的电池组列能够使电池板产生相对较高的电压或电流。本文来自环球光伏网 光伏阵列由串联在一起的光伏模块通过并联构成。每串光伏模块的的最大电压必须低于逆变器的最大输入电压额定值。 当光伏系统部分被遮蔽时,未被遮蔽的电池中的电流流经被遮蔽部分的旁路二极管。 当光伏阵列受到遮蔽而出现上述情况时,会产生一条具有多个峰值的 V-P 电气曲线。图 1 显示了具有集中式最大功率点跟踪系统( MPPT) 功能的标准并网配置,其中一个组列的两个电池板被遮蔽。集中式 MPPT无法设置直流电压,因此无法令两个组列的输出功率都达到最大。在高直流电压点 (M1),MPPT 使未遮蔽组列的输出功率达到最大。在低直流电压点 (M2),MPPT 将使遮蔽组列的输出功率达到最大:旁路二极管绕过遮蔽电池板,此组列的未遮蔽电池板将提供全量电流。阵列的多个 MPP 可能导致集中最大功率点跟踪(MPPT)配
最大功率跟踪原理及控制方法 2.1最大功率跟踪原理 太阳能电池的输出特性如图一所示,从图中的P/V特性曲线可以看出,随着端电压的增加输出功率先增加后减小,说明存在一个端电压值,在其附近可获得最大功率,因此,在光伏发电系统中,要提高系统的整体效率,一个重要的途径就是实时调整光伏电池的工作点,使之始终工作在最大功率点附近,这一过程就称之为最大功率点跟踪-MPPT。 图一光伏电池的特性曲线 2.2 最大功率跟踪的控制方法 MPPT的控制方法:光伏系统中的最大功率点跟踪的控制方法很多,使用最多的是自寻优的方法,即系统不直接检测光照和温度,而是根据光伏电池本身的电压电流值来确定最大功率点。这种方法又叫做TMPPT(True Maximum Power Point Tracking)。在自寻优的算法中,最典型的是扰动观察法和增量电导法。本论文使用扰动观察法,扰动观察法主要根据光伏电池的P-V特性,通过扰动端电压来寻找MPPT,其原理是周期性地扰动太阳能电池的工作电压值( ),再比较其扰动前后的功率变化,若输出功率值增加,则表示扰动方向正确,可朝同一方向(+ )扰动;若输出功率值减小,则往相反(- )方向扰动。通过不断扰动使太阳能电池输出功率趋于最大,此时应有[8]。此过程是由微处理器即C8051F320控制完成的。 3、系统的总体结构 3.1系统的结构图 系统的结构图如图二所示。其中单片机要采集太阳能电池的输出电压和输出电流及蓄电池的充电电流和开路电压,通过一定的控制算法(即改变占空比),调节太阳能电池的输出电压和电流,从而实现太阳能电池在符合马斯曲线的条件下以最佳功率对蓄电池充电,系统的硬件主要由核心控制模块、采样模块、驱动模块、升压式DC/DC变换器模块组成。
直流母线电压控制实现并网与最大风能跟踪 徐 科,胡敏强,杜炎森,杨晓静 ( 东南大学电气工程学院,江苏省南京市210096) 摘要:针对永磁同步风力发电机加不控AC/DC 和可控DC/AC 结构,提出采用直流母线电压控制 同时实现并网与最大风能跟踪。分析了可控DC/AC 通过功率解耦控制直流母线电压的原理。提出采用可控DC/AC 对直流电容充电的直接并网方法,并详细讨论了充电电流和限流电阻的取值范围。分析了直流母线电压与发电机转速之间的关系,提出采用直流电压变步长扰动代替转速定步长扰动实现最大风能跟踪,进一步提出采用功率变化量平方的比例值作为扰动值。详细的仿真验证了文中提出的控制策略简单、可行,适用于并网型永磁同步风力发电机。关键词:永磁同步风力发电机;直接并网;最大风能跟踪;直流电压变步长扰动中图分类号:TM614;TM76 收稿日期:2006212219;修回日期:2007201213。 0 引言 永磁同步风力发电机(PMSW G ———permanent magnet synchronous wind generator )目前有多种并网电路,其中不控AC/DC 加可控DC/AC 的交直交结构是PMSW G 的最简单、可行的并网电路[122]。 并网与最大风能跟踪是并网型风力发电的基本问题。目前的PMSW G 通过三相逆变器连接电网,其并网过程可以采用与双馈风力发电机类似的方法。文献[324]讨论了双馈风力发电机的并网过程,双馈风力发电机需要辅助调速机构将转速稳定在某个值附近,通过电力电子变换器调整并网电压使其与电网电压同步才能并网。 基于扰动的最大风能跟踪方法无需知道风力机的固有曲线,无需测量风速和转速[527],具有比给定转速和给定功率法更好的通用性[8]。文献[5]用于离网型系统,对PMSW G 通过可控AC/DC 采用功率变化的微分量变步长扰动转速实现风能跟踪,结构和算法都较复杂。文献[6]采用中间直流环节带DC/DC 变换器和蓄电池的小型PMSW G 系统。通过DC/DC 变换器对直流电压进行定步长扰动,结构较复杂,效果不理想。文献[7]采用不控AC/DC 和可控DC/AC 对PMSW G 进行并网,定步长扰动并网DC/AC 的电流观察功率和电压变化实现风能跟踪。除电流扰动量外还需要观察功率和电压的2个参数及其微分变化,过程复杂且效果不是很理想。 PMSW G 无论是采用早期整步同步并网方式还 是现在通过电力电子变换器并网,均需要通过辅助调速机构和检测同步信号才能并网,过程较复杂。PMSW G 的风能跟踪扰动方法结构算法较复杂,多针对离网型系统、采用定步长扰动,效果不理想。而且现有的并网控制和风能跟踪方法是分开进行的,分别采用不同的参数控制,进一步增加了结构算法的复杂性。 因此,对于PMSW G 加不控AC/DC 和可控DC/AC 的并网型风力发电结构,目前还缺乏简单、统一的并网方法和风能扰动算法。鉴于上述情况,本文提出通过控制直流母线电压实现并网与风能跟踪。通过可控DC/AC 对直流母线电容充电,实现无需辅助调速机构和检测同步信号的直接并网方法。根据转速与直流母线电压的关系,提出直接变步长扰动直流母线电压实现最大风能跟踪。最后对所提出的方法进行了详细的仿真验证。 1 DC/AC 控制直流母线电压原理分析 PMSW G 由于功率无需双向流动,因此采用不控AC/DC 和可控DC/AC 是一种经济有效的并网电路,如图1所示 。 图1 PMSWG 的并网电路Fig.1 G rid 2connected circuit of PMSWG 3 5第31卷 第11期 2007年6月10日 Vol.31 No.11 J une 10,2007
电子知识 最大功率点(2)MPPT(14) MPPT控制器的全称“最大功率点跟踪”(Maximum Power Point Tracking)太阳能控制器,是传统太阳能充放电控制器的升级换代产品。所谓最大功率点跟踪,即是指控制器能够实时侦测太阳能板的发电电压,并追踪最高电压电流值(VI),使系统以最高的效率对蓄电池充电。下面我们用一种机械模拟对比的方式来向大家解释MPPT太阳能控制器的基本原理。 要想给蓄电池充电,太阳板的输出电压必须高于电池的当前电压,如果太阳能板的电压低于电池的电压,那么输出电流就会接近0。所以,为了安全起见,太阳能板在制造出厂时,太阳能板的峰值电压(Vpp)大约在17V左右,这是以环境温度为25°C时的标准设定的。这样设定的原因,(有意思的是,不同于我们普通人的主观想象,下面的结论可能会让我们吃惊)在于当天气非常热的时候,太阳能板的峰值电压Vpp会降到15V左右,但是在寒冷的天气里,太阳能的峰值电压Vpp可以达到18V! 现在,我们再回头来对比MPPT太阳能控制器和传统太阳能控制器的区别。传统的太阳能充放电控制器就有点象手动档的变速箱,当发动机的转速增高的时候,如果变速箱的档位不相应提高的话,势必会影响车速。但是对于传统控制器来说,充电参数都是在出厂之前就设定好的,这就像车的档位被固定设置在了1档。那么不管你怎样用力的踩油门,车的速度也是有限的。MPPT控制器就不同了,它是自动挡的。它会根据发动机的转速自动调节档位,始终让汽车在最合理的效率水平运行。就是说,MPPT控制器会实时跟踪太阳能板中的最大
的功率点,来发挥出太阳能板的最大功效。电压越高,通过最大功率跟踪,就可以输出更多的电量,从而提高充电效率。 理论上讲,使用MPPT控制器的太阳能发电系统会比传统的效率提高50%,但是跟据我们的实际测试,由于周围环境影响与各种能量损失,最终的效率也可以提高20%-30%。 从这个意义上讲,MPPT太阳能充放电控制器,势必会最终取代传统太阳能控制器 为什么要使用MPPT ? 太阳能电池组件的性能可以用U-I曲线来表示。电池组件的瞬时输出功率(U*I)就在这条U-I曲线上移动。电池组件的输出要受到外电路的影响。最大功率跟踪技术就是利用电力电子器件配合适当的软件,使电池组件始终输出最大功率。 如果没有最大功率跟踪技术,电池组件的输出功率就不能够在任何情况下都达到最佳(大)值,这样就降低了太阳能电池组件的利用率。 IBIS模型是一种基于V/I曲线对I/O BUFFER快速准确建模方法,是反映芯片驱动和接收电气特性一种国际标准,它提供一种标准文件格式来记录如驱动源输出阻抗、上升/下降时间及输入负载等参数,非常适合做振荡和串扰等高频效应计算与仿真。 IBIS本身只是一种文件格式,它说明在一标准IBIS文件中如何记录一个芯片驱动器和接收器不同参数,但并不说明这些被记录参数如何使用,这些参数需要由使用IBIS模型仿真工具来读取。欲使用IBIS进行实际仿真,需要先完成四件工作:获取有关芯片驱动器和接收器原始信息源;获取一种将原始数据转换为IBIS格式方法;提供用于仿真可被计算机识别布局布线信息;提供一种能够读取IBIS和布局布线格式并能够进行分析
最大功率跟踪的控制原理 最大功率跟踪(MPPT)是并网发电中的一项重要的关键技术,它是指控制改变太阳电池阵列的输出电压或电流的方法使阵列始终工作在最大功率点上,根据太阳电池的特性,目前实现的跟踪方法主要有以下三种: (1)恒电压法,因为太阳电池在不同光照条件下的最大功率点的电压相差不大,近似为恒定。这种方法的误差很大,但是容易实现,成本较低; (2)爬山法,通过周期性的不断的给太阳电池阵列的输出电压施加扰动,并观察其功率输出的改变,然后决定下一次扰动的方向。这种方法的追踪速度较慢,只适合于光强变化较小的环境; (3)导纳微分法(又称增量电导法),认为太阳电池阵列的的最大功率点处,输出功率对输出电压的一阶倒数等于零。因此在环境光强发生改变时,根据dI/dV的计算结果是否等于-I/V,决定是否继续调整输出电压,既可实现最大功率点的跟踪。该方法相对于恒电压法和爬山法有高速稳定的跟踪特性。 上述三种方法各有特点,但是都不同时具有低成本、高稳定性、快速追踪的特性。第一种方法只是粗略估计了最大功率点的位置,在光强变化到很大或较小时都会产生很大的误差。后两种方法本质上都是通过判断当前工作点是否处于最大工作点来决定是否继续调整及调整的方向,因此最终的结果是逆变器始终工作在最大功率点的左右,来回振荡,而不是真正的工作在最大功率点处,反应在太阳电池阵列的输出上就是,太阳电池阵列的输出电压或电流总是以一个直流电平为中心上下跳跃,波形很不稳定,而且在光强变化速度较快时,不能及时反应。 三、太阳能电池功率追踪访法及算法 扰动观察法是目前太阳能电池最大功率追踪技术中最为成熟以及被采用最多的方法,其系统方块图如图12所示。由图中可以很明显的看出此法的硬件需求较少,模拟/数字转换器节省得相当多,因此在制造的成本上将大为降低。扰动观察法之缺点在于最大功率追踪过程中,当大气条件迅速改变时,由于响应速度未能因应调整,会使追踪的速度变缓,造成功率的损失,不过此一缺点可以用软件技术来加以改善,赋予系统自我调整响应速度之功能,这也是本文的研究重点,亦即以软件算法来达到太阳能电池最大功率的追踪,并分析系统操作于较高频率下,其追踪的性能。 依电路理论而言,当太阳能电池的等效输出阻抗等于负载端的等效输入阻抗时,太阳能电池所送出的功率为最大,这就是最大功率转移定理。因此当太阳能电池模块串接直流-直流转换器之后如图13,若要得到太阳能电池的最大功率,则转换器的输入阻抗必须和太阳能电池的输出阻抗相等,但是太阳能电池的输出功率受到大气条件的影响,使得其等效输出阻抗并不会固定在某一定值。对转换器而言,其输入阻抗是随着工作周期的改变而有所不同,所以转换器若要维持太阳能电池于最大功率下操作,就必须随时地调整其工作周期。 图片附件: fig12.JPG (2006-3-23 23:42, 26.31 K)
风力发电系统最大功率点跟踪控制方法研究综述摘要:为充分利用风能,需要捕获风电系统的最大功率点。由于风速的随机性与风电系统的非线性,最大功率点捕获控制比较困难,也是风力发电的热点问题之一。介绍了多种常用的最大功率跟踪方法的原理,说明了各种方法的优、缺点,指出了最大功率点跟踪方法的发展趋势,对最大功率点跟踪方法的选择和研究有一定的参考指导价值。 关键词:风力发电系统;最大功率跟踪;最优叶尖速比法;功率信号反馈法;爬山搜索法Review on the Method of Tracking the Maximum Power Point in Wind Power Generation System Ma-yan、Wang-haiyun (Electrical Engineering Col lege,Xinjiang University,Urumqi,Xinjiang 830008) Abstract:In order to utilize the wind power sufficiently,it is necessary to capture the maximum power point in wind power generation system.Due to the randomness of the wind speed and the nonlinearity of the wind powergeneration system,capturing the maximum power point is very difficult and is also one of the hot issues in wind power generation.In this paper,the principles of several common methods to track the maximum power point were presented;the advantages and disadvantages were discussed;the development trend of the method to track the maximum power point was pointed out.All these had referential and instructive values for the selection and investigation of the maximum power point tracking method. Key words:wind power generation system;tracking the maximum power point;optimal tip speed ratiomethod;power signal feedback;climbing search method 0 引言 能源是支持经济发展的重要因素和战略资源,人类社会发展的历史与能源开发和利用水平密切相关。进入二十一世纪以来,随着现代工业的飞速发展,人类对已开发能源的利用与日剧增,以煤炭、石油、天然气为主的能源结构造成了大气污染,过度消耗生物能引起生态破坏。人类不但要面对不可再生资源日益枯竭的压力,而且也面临着生态环境的日益恶化。基于上述原因,对可再生能源的开发和利用也就成为了迫在眉睫的问题之一。在目前众多的可再生能源中,风能具有分布广、储量大、可持续利用,而且无污染的特点,可谓是真正的绿色能源,是最具大规模开发利用前景的新能源之一。近年来,对风能的开发利用发展迅速,已逐步步入世界各国的视野范围之内,且成为了世界各国关注的焦点[1]。 风能是一种具有随机性、不稳定性特征的能源,风能的获取不仅与风力发电机的机械特性有关,还与其采用的控制方法有关。在某一风机转速情况下,风速越大时风力机的输出功率越大,而对某一风速而言,总有一最大功率点存在。只有当风力发电机工作在最佳叶尖速比时,才能输出最大功率。好的控制方法可使风轮的转速迅速跟踪风速变化,使风力发电机始终保持在最佳叶尖速比上运行,从而最大限度地获得风能。要保证最大限度地将捕获到的
龙源期刊网 https://www.doczj.com/doc/5b13142761.html, 风力发电系统运行及控制方法 作者:胡飞 来源:《中国科技纵横》2016年第24期 【摘要】随着各类新型能源的开发与使用,风力发电系统作为一种新能源也逐渐应用于 人们的生活与工作中,风力发电系统的使用不仅可以减少煤炭等资源的应用,保护环境,减少污染环境的气体,也可以不断地为我国提供安全、高效率的供电质量。本文就主要针对风力发电系统的运行及控制进行相关探究。 【关键词】风力发电系统运行控制方法 在提倡无污染、高效率发展的今天,各个国家也都在相继追求与研究风能以及其他各类新能源的发展,尤其是在现在这个能源及其短缺的情况下,风力发电系统的研究更显得极为重要。依据各种各样的运行方式和控制技术,风力发电系统可以分为恒速恒频系统和变速恒频系统,都可以有效地利用风能。 1 风力发电系统的系统结构 风力发电系统的系统结构主要是由风轮、齿轮箱、发电机和变流设备等设备组成,其中风轮主要是用于捕捉风能,然后再进一步将捕捉到的风能转化为机械能,而机械能转化为人们可以进一步使用的风能主要是由发电机来完成的,最终再由变流设备将发电机发出的频率转化为一样频率的交流电,再移送至电网就可以达到发电的目的。 在风力发电机中以小型风力发电系统为例进行简单介绍,小型风力发电系统主要是由小型风力机、交流发电机、三相不控整流桥、Boost变换器、单相并网逆变器、滤波器、直流调压负载以及本地用户负载等各个部分组成,这几大部分相互调节,和谐运作,共同促进了风力发电系统的正确运行与控制。 在对风力发电系统的运行控制过程中,为了实现风力发电机的最大功率跟踪,研究人员对Boost变换器进行了一系列的相关控制研究。 2 风力发电系统的运行 风力发电系统主要包括两种运行状态,即为最大风能追踪状态与额定功率运行状态。 2.1 最大风能追踪状态 风力发电系统的最大风能追踪状态,就是指当风速比额定风速低时,但是为了达到该风力发电机的最大输出功率,要不断地让风轮的转速随着风波的变化而不断变化,从而可以最大程度的利用风能,提高最大风能利用系数。
3.5传统的最大功率点跟踪方法 3.5.1 定电压跟踪法 通过图3-10a 、3-10b 可知,当辐照度大于一定值并且温度变化不大时,光伏电池的输出P -U 曲线上最大功率点几乎分布于一条垂直直线的两侧附近。定电压跟踪法正是利用这一特性。根据实际系统设定一个恒定不变的运行电压,使系统在设定的电压下运行,从而尽可能使系统输出的功率最大。在外界环境变化不大时,可以近似认为太阳能电池始终工作在最大功率点处[24]。mpp U 表示光伏阵列的最大功率点电压,oc U 表示光伏阵列的开路电压,经研究发现,mpp U 和oc U 有着近似的线性关系: mpp OC U k U ≈ (3.14) 式(3.14)中,k 为比例系数,取决于光伏电池的特性,一般其取值为0.8左右。 该算法结构简单,容易实现,但是由于该算法只是一种近似的MPPT 控制算法,在外界环境发生变化时,很容易偏离最大功率点。因此,电压跟踪法常用在控制要求低,成本低廉的简易系统中[25]。 3.5.2 电导增量法 根据光伏阵列的P-U 输出特性曲线可知,它是一条连续可导的单峰曲线,在最大功率点处,功率对电压的导数为零,也就是说,最大功率点的跟踪实质就是搜索满足0dP dU =条件的工作点。考虑光伏电池的瞬时输出功率为: P UI = (3.15) 将上式两边对光伏电池输出电压U 求导,则 dP dI I U dU dU =+ (3.16) 当0dP dU =时,光伏电池的输出功率达到最大。则可以推导出工作点位于最大功率点时需满足以下关系: d I I d U U =- (3.17) 即当光伏电池阵列工作在最大功率点时,需满足(3.17)式。 电导增量法的优点是与太阳能电池组件特性及参数无关,因而能够适应光照强度快速变化的情况,而且该方法的电压波动小,并具有较高的控制精度;其缺点是该方法实现起来复杂,并且容易受到其他信号的干扰而出现误动作。一般情况下dI 和dU 值取的很小,那么就需要光伏阵列输出电压、输出电流等参数的采
考虑损耗转矩的风力发电系统最大风能跟踪控制 摘要:由于系统功率存在损耗,且损耗值随着风速变化而变化,导致基于功率 反馈的传统最大风能跟踪策略实际应用时不能准确给定最大功率,从而影响系统 风能吸收效率。 关键词:发电机;风力发电系统;最大风能跟踪;损耗转矩 随着能源的匮乏及传统火力发电对环境的污染,可再生能源的发展受到越来 越多的重视,包括风能、太阳能、海洋能、生物质能等,其中风能发电发展最迅速、潜力最大。 一、最大风能捕获的基本理论 1.风力机模型。根据空气动力学,风力机的输入功率可表达为 (1) 式中:ρ———空气密度;S w———风力机叶片迎风扫掠面积;v———进入风力机扫掠面之前的空气流速。由于通过风轮旋转面的风能并非全部都能被风力机吸收, 故可定义风能利用系数C p来表征风力机捕获风能的能力: (2) (3) (4) 式中:β———桨距角(小于额定风速时为0);λ———叶尖速比;ω———风轮角速度;R———风轮半径。这样风力机的输出功率为 (5) 2.功率曲线法的最大风能捕获原理。由式(2)、式(3)可得C p与λ的关系。当 桨距角不变时,风能利用系数C p仅与叶尖速比λ有关。由式(4)可知,当风速变化时只需调节发电机转速ω,使λ保持在最佳值λopt,就可使得C p保持在最大值C pmax,使风轮捕获最大的风能。将不同风速代入式(5),可得在不同风速下风力机输 出机械功率的曲线,将输出功率的最大值连接起来,就形成一条最佳功率转速P max-ω曲线。在此条曲线上的C p为最大值。由于实际运行中风速较难准确检测, 无法直接给出与之相对应的最佳转速指令,故一般不直接采取转速闭环控制,而是 控制从风力机轴上吸收的机械功率,以此实现对转速的间接控制。这种控制方式不 以转速为直接目标,而是通过最佳功率转速P max-ω曲线功率曲线获得最佳转速和 最佳叶尖速比为最终目的。将式(4)代入式(5)得 (6) 在实际运行时,实时检测风电机组转速,根据式(6)计算此转速下的最佳功率,作 为发电机控制子系统的有功功率参考值。 二、最大风能跟踪控制策略 1.最佳电流给定MPPT控制策略。如在永磁同步电机矢量控制中,电流控制 方法主要有:i d=0控制、功率因数为1控制、恒磁链控制、最大转矩电流比控制、弱磁控制、最大输出功率控制等。不同的电流控制方法具有不同的优缺点,这根 据实际需求而定,其中i d=0控制是最为简单的一种电流控制方法,也最为常用。本文以i d=0控制为例提出基于PMSG的最佳电流给定的MPPT控制策略。当采用 i d=0电流控制方法时,由定子绕组电流计算的永磁同步发电机电磁转矩方程可简 化为 (6) 由于电机极对数和永磁磁链都认为是常量,则由式(6)可知此时电磁转矩仅取 决于发电机q轴电流分量。即当电机给定最佳电流i qs时,便能获得最佳电磁转
课程设计说明书 风力发电机组控制系统设计 —最大功率点跟踪控制 专 业 新能源科学与工程 学生姓名 喻绸绢 班级 能源121 学 号 1210604122 指导教师 薛迎成 完成日期 2015年12月14日
目录 1.控制功能设计要求 (1) 1.1任务 (1) 2.设计 (3) 2.1 介绍对象(风力发电系统的最大功率点跟踪控制技术研究)3 2.2控制系统方案 (3) 2.2.1风力机最大功率点跟踪原理 (3) 2.2.2风力机发电系统 (6) 2.2.3风速变化时的系统跟踪过程 (11) 3.硬件设计 (13) 4.软件设计 (16) 5.仿真或调试 (17) 参考文献 (19)
1.控制功能设计要求 1.1任务 能源与环境是当今人类生存和发展所要解决的紧迫问题而传统能源已被过度消耗 ,因此,可再生能源的开发利用越来越受到重视和关注,其中风能具有分布广、储量大、利用方便、无污染等优点是最具大规模开发利用前景的新能源之一。 目前,变速恒频风力发电系统已经广泛用于实际风机中,在低于额定风速的情况下根据风速变化的情况调节风机转速,使其运行于最优功率点,从而捕获最大风能;在高于额定风速时,通过对桨距角的调节,使风机以额定功率输出。常用最大功率捕获方法主要有功率反馈法、模糊控制法、混合控制法等。为了充分利用风能,提高风电机组的发电总量,本文分析风机特性及最大功率点跟踪(maximum pow er point tracking MPPT)工作原理。众多的MPPT实现方法各有千秋,对于不同的应用场所各有所长,对于多种方案,需要进行大量细致的实验工作和数据分析。 风能是一种具有随机性、不稳定性特征的能源,风能的获取不仅与风力发电机的机械特性有关,还与其采用的控制方法有关。在某一风机转速情况下,风速越大时风力机的输出功率越大,而对某一风速而言,总有一最大功率点存在。只有当风力发电机工作在最佳叶尖速比时,才能输出最大功率。好的控制方法可使风轮的转速迅速跟踪风速变化,使风力发电机始终保持在最佳叶尖速比上运行,从而最大限度地
由太阳电池的输出特性所决定,随着光照强度、温度等自然条件的改变,最大输出功率点也相应改变。为了提高光伏发电效率、降低成本,光伏发电系统必须考虑最大功率点的跟踪问题。 1太阳能电池的伏安特性 太阳能光伏阵列光照特性解析式如下[1]: I=Ig-Idexp q(V0+I0Rs" )-#$ 1-V0+I0R ssh (1)式中:I0,V分别为太阳能电池的输出电流和输出电压;Id为二极管饱和电流;Ig为光生电流;q为电子的电荷量(1×10-19C);A为二极管特性因子; K为波尔兹曼常量(1.38×10-23J/kWh);T为太阳能 电池温度;Rs,Rsh分别为太阳能电池的串联、并联 电阻。 对于太阳能电池来说,式(1)中的(V0+I0Rs)/ Rsh数值很小,可以忽略不计。I—U特性可近似表 达为 I=Is-Idexp q
(V0+I0Rs" )-#$ 1(2) 开路状态时,I=0,U=Uoc;短路状态时,I=Isc, U=0;在最大功率点,I=Im,U=Um,dP/dU=0。 根据系统在最大功率点处和开路状态下的条件,最后可以求得太阳能电池阵列的体系模型。I- U特性、 P-U特性都是温度和光强的函数,它们都随这2个因素的改变而变化,其中,温度主要影 响输出电压,光强主要影响输出电压。 2最大功率点的跟踪方法 为追踪光伏系统的最大功率点,我们在参考 国内外经验和方法的基础上,依据太阳能电池的 I-U和P-U输出特性,得出下列最大功率点的追 踪方法。 2.1恒定电压跟踪法 收稿日期:2006-11-01。作者简介:李 玲(1980-),女,硕士研究生,从事光伏技术的应用和研究。E-mail:liling13888634660@126.com 光伏系统最大功率点跟踪方法
自适应最大功率点跟踪方法的仿真研究 帅玲玲,王利平,何杲杳 (吉林市东北电力大学电气工程学院,吉林吉林132012) 摘要:针对观测扰动法的不足,通过深入分析太阳能光伏电 池的功率输出特性曲线,本文提出了一种基于观测扰动法的自适应最大功率点的跟踪控制方法。该方法响应速度快,模型简单,容易实现。通过引入一个变步长参数,可以实时依据功率变化差值来动态调整扰动步长,从而实现了最大功率点的自动跟踪。利用MA TLAB 7.2建立了系统模型并进行仿真,结果表明,该系统在日照强度大范围变化时仍然能够快速、准确地跟踪太阳能电池的最大功率点。 关键词:光伏电池;最大功率点跟踪;观测扰动法;DC/DC 0引言 随着全球经济的发展,能源问题日益尖锐,常规能源如石油、煤炭等消耗量的大规模增加,日益恶化的生态环境迫使世界各国开始积极寻找一条新的可持续发展的能源之路[1]。光伏电源具有无污染、无噪音、维护简单的优点,越来越受到关注,在未来的供电系统中将占有重要的地位。太阳能电池板的造价较高,初期投入较大,占整个光伏电源系统造价的比重很大且转化效率低。因此,如何在现有光电元件转换技术的基础上进一步提高光伏电池的转换效率,一直是光伏系统研究的重要方向。为了提高太阳能的利用率,对太阳能电池进行最大功率点跟踪(Maximum Power Point Tracking,MPPT)是有效途径之一。目前最大功率点跟踪控制的方法有观测扰动法、爬山法、功率数学模型法、短路电流测试法及模糊控制、遗传算法控制等[2,3]。 针对观测扰动法存在的一些不足,本文提出了一种自适应最大功率点跟踪方法。采用该方法既解决了定步长时因外界条件变化大而造成的追踪速度慢的缺点,又避免了外界条件变化小时定步长参数过大引起的功率振荡。利用MA TLAB 7.2建立起仿真模型,核心是通过嵌入一个.M程序编写的模块来实现最大功率点的跟踪。仿真结果验证了此方法的可行性。 1光伏电源 光伏电池工作原理的基础是半导体PN结的光生伏打效应。通过大量的测试及计算可将光伏阵列的数学模型描述如下[4]: () {exp[]1} s s ph sh q V IR V IR I I I AkT R ++ =???(1) 3 11 []exp[()] GO o or r r qE T I I T Ak T T =?(2) 1 [(298)]/1000 ph scr I I K Tλ =+?(3) (298) oc ocs T U U K T =+?(4) 表1光伏电池等效模型参数 I 输出电流 V 输出电压 I d反向饱和电流数量级为10-4A q 电子电荷 1.6×10-19 k 玻尔兹曼常数 1.38×10-23 T 绝对温度t+273 T r参考温度301.18 K λ光照强度 I scr标准条件下短路电流 I ph光照电流 GO E硅的带宽 1.13e I o T r下电池饱和电流 R s串联等效电阻 R sh并联等效电阻 A PN结理想因子 1.11 K l短路电流温度系数0.0017 A / °C 根据公式(1)~(4)可知,温度主要影响太阳能电池的输出电压,而日照强度主要影响输出电流。在不同日照强度和环境温度下,其输出特性曲线不同,且均为非线性。在一定的日照强度和环境温度下,只有使其工作在特定的电压或电流下才能使其输出最大功率。但相对于光强的变化来说,光伏电池表面温度的变化是非常缓慢的,因此,在分析过程中,假定光伏电池的表面温度保持不变。 2 DC/DC模块设计 由于太阳能光伏阵列的输出电压偏低,为得到预期的电压值通常连接一个BOOST升压变换器,其作用是通过控制电压的方法将不控的直流输入 1