
异步电动机的数学模型和电压空间矢量
异步电动机的数学模型
异步电动机的数学模型是一个高阶、非线性、强耦合的多变量系统。在建立其数学模型时作如下假定。
(1)电动机定、转子三相绕组完全对称,所产生的磁势在气隙空间中呈正弦分布。
(2)忽略铁芯涡流、饱和及磁滞损耗的影响,各绕组的自感和互感都是线性的。
(3)暂不考虑频率和温度变化对电机参数的影响。
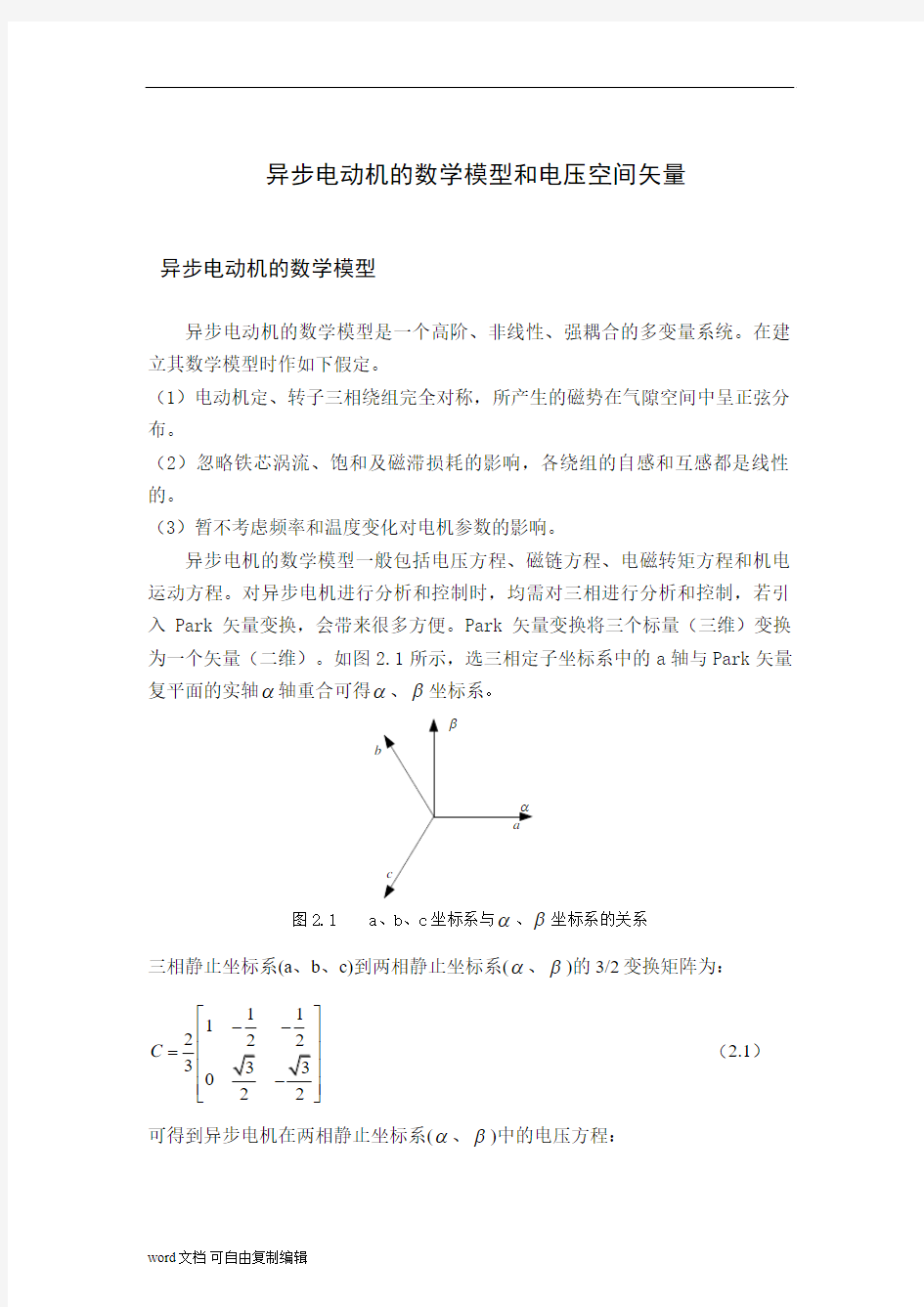
异步电机的数学模型一般包括电压方程、磁链方程、电磁转矩方程和机电运动方程。对异步电机进行分析和控制时,均需对三相进行分析和控制,若引入Park 矢量变换,会带来很多方便。Park 矢量变换将三个标量(三维)变换为一个矢量(二维)。如图2.1所示,选三相定子坐标系中的a 轴与Park 矢量复平面的实轴α轴重合可得α、β坐标系。
图2.1 a 、b 、c 坐标系与α、β坐标系的关系
三相静止坐标系(a 、b 、c)到两相静止坐标系(α、β)的3/2变换矩阵为:
1112223022C ??
--
??
?
=?-??? (2.1) 可得到异步电机在两相静止坐标系(α、β)中的电压方程:
00
00s s s s m s s s s m r r m r m
r r r r r r r m
m r r
r r U i R L p L p U i R L p
L p U i L p L R L p L U i L L p
L R L p ααββααββωωωω+????
??????
?
?+?
?????=????
??+????
??--+?????????? (2.2) 式中:
s R 、r R ――分别为定子电阻和转子电阻;
s L 、r L 、m L ――分别为定子自感、转子自感和定、转子互感;
r ω――电机转子角速度(电角速度);
s U α、s U β――分别为定子电压的α、β分量;
r U α、r U β――分别为转子电压的α、β分量,在鼠笼机中r U α=r U β=0; s i α、s i β――分别为定子电流的α、β分量; r i α、r i β――分别为转子电流的α、β分量;
p ――微分算子,d
p dt
=
。 电机的磁链方程为:
0000000
s s s m s s s m r r m r r r m
r i L L i L L i L L i L L ααββααββψψψψ????
??????????????=??????????????????????
(2.3) 式中:
s αψ、s βψ――分别为定子磁链的α、β分量;
r αψ、r βψ――分别为转子磁链的α、β分量。
电机的电磁转矩方程为:
()3
2e n m r s s r T P L i i i i αβαβ=- (2.4)
或利用式(2.3)改写成:
()3
2e n s s s s T P i i αββαψψ=- (2.5)
式中:
e T ――电机的电磁转矩; n P ――电机的极对数。 电机的机电运动方程为:
r
e L n d J T T P dt
ω-=
(2.6)
式中:
L T ――负载转矩;
J ――电机及拖动系统的转动惯量。
式(2.6)即构成了异步电机在α、β坐标系下完整的动态数学模型。为了便于综合分析,上述电机方程有时采用矢量方程的形式。以α轴为实轴,β轴为虚轴,可以得到矢量形式的异步电动机数学模型[12]、[27]。
s s s s r r r r r
d U R I dt
d
U R I j dt ψψωψ=+
=+- (2.7)
s s s m r r m s r r
L I L I L I L I ψψ=+=+ (2.8)
()()33
22
e n m r s n s s T P L I I P I ψ=
?=? (2.9) r
e L d J T T ω-=
(2.10)
两点式逆变器各开关元件的通断可以组成8个开关状态,见表 2.1。Sa=1时,表示逆变器的a 桥臂的上开关闭合,下开关断开;Sa=0时,情况相反,另外两个桥臂与此同。如图 2.3所示以定子绕组轴线为空间坐标系,建立静止三相坐标系a 、b 、c ,同时建立正交两相坐标系α、β,这样8个开关状态对应8个电压空间矢量U0~U7,其中U0和U7为零电压空间矢量。电压空间矢量如图2.3所示。
表2.1 逆变器的8种开关组合状态
(001)
(101)
12u 3u β
图2.3 电压空间矢量
根据逆变器的开关状态,其输出的三相相电压由下式得到:
2111213112a a d b b c c u S U u S u S --??
????
??????=--????????????--??
????
(2.11) 若用s u 代表定子三相电压的合成作用在定子坐标系中的位置,则称s u 为定子电压的空间矢量。设a u 与α轴重合,则其Park 变换式为:
24332
()3
j j s a b c u u u e u e ππ=++ (2.12)
并用0u ,1u ,2u …7u 表示八种开关组合状态下的电压矢量。
例如011abc S =时,得: 23d a U u =-,3
d b c U
u u ==。
可知:
24331222211()()((3333333223222222
33333
j j d d d d d d j d d d d U U U U U U u e e j j U U U U e ππ
π??
=-++=-+-++--??
??
??????=-+-=-= ? ?????????
上式说明,开关组合(011)状态下电压矢量1u 的幅值等于2/3d U ,与α轴夹角为180?,用相同的方法可以导出其他矢量的幅值和位置,如图 2.3所示。六个电压矢量分别为:()()()()()()123456011,001,101,100,110,010u u u u u u ,称之为有效电压矢量,其幅值均为2/3E ,它们在坐标系中的位置相差60?。开关组合(000)和(111)状态下电动机电压均等于0,所以称之为零电压矢量,用
0u 代表组合(000),用7u 代表组合(111)。
同步电机数学模型的建立和仿真 :包邻淋 专业:控制工程 学号:1402094
摘要 (3) 1同步电机数学模型的建立 (4) 1.1模型的导出思路 (4) 1.2变量置换用的表达式 (5) 1.4电机实用模型 (6) 1.5电机实用模型的状态空间表达式 (8) 1.6电机模型参数的确定 (10) 2 同步电机数学模型的仿真 (13) 2.1同步发电机仿真模型 (13) 2.2不同阶次模型的仿真分析 (14) 参考文献 (17)
摘要 一般发电机存在临诸多问题,建立精确地描述同步发电机的数学模型是十分必要的[1]。电力系统数字仿真因具有不受原型系统规模和结构复杂性限制,能保证被研究系统的安全性,且具有良好的经济性、方便性等优点。 常用的同步发电机数学模型由同步发电机电路方程及转子运动方程两部分组成。同步发电机电路方程又分为基本方程和导出模型两类[4]。对于不同的假设条件,同步发电机模型可作不同程度的简化,因此同步发电机的导出模型也有不同的形式。同一假设条件下,不同的同步发电机数学模型,其主要区别在于电机的转子绕组数,有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,则称之为转子7阶模型[5]。如果转子绕组数减少,则发电机方程组的阶数也相应减少。 本文通过MATLAB/simulink进行仿真计算,比较采用不同的同步发电机模型时,对系统的稳定性分析的影响。在此基础上提出在不同情况下进行电力系统仿真计算选取同步发电机数学模型的方法。
1同步电机数学模型的建立 1.1模型的导出思路 由于定转子间的相对运动,基于空间静止不动的三相坐标系所建立的原始方程,磁链方程式中会出现变系数,这对方程组的求解和模型的建立造成了很大的困难。现在通用的方法是对原始方程做d q变换(又称为派克变换),将原方程从a b c三相静止不动坐标系变为与转子相对静止的d q坐标系。 基本方程中有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,若设,则原方程为5阶,若转子运动方程为,;所含变量为,。。在化为实用模型时 和保留,用取代,再用5个磁链方程消去3个转子电流,以及2个定子磁链,而 则用实用变量代替。 经过上述思路导出的实用模型,除了以及引入的等效实用变量之外方程中系数都是同步电机技术参数中的电抗和时间
2.1同步发电机数学模型及运行特性 本节主要阐述同步发电机稳态数学模型及运行特性:包括向量图、等值电路与功率方程以及功角特性。 2.1.1 同步发电机稳态数学模型 理想电机假设: 1)电机铁心部分的导磁系数为常数; 2)电机定子三相绕组完全对称,在空间上互差120度,转子在结构上对本身的直轴和交轴完全对称; 3)定子电流在空气隙中产生正弦分布的磁势,转子绕组和定子绕组间的互感磁通也在空气隙中按正弦规率分布; 4)定子及转子的槽和通风沟不影响定子及转子的电感,即认为电机的定子及转子具有光滑的表面。 同步电动机是一种交流电机,主要做发电机用,也可做电动机用,一般用于功率较大,转速不要求调节的生产机械,例如大型水泵,空压机和矿井通风机等。近年由于永磁材料和电子技术的发展,微型同步电机得到越来越广泛的应用。同步电动机的特点之一是稳定运行时的转速n与定子电流的频率f1之间有严格不变的关系,即同步电动机的转速n与旋转磁场的转速n0相同。“同步”之名由此而来。 同步发电机是电力系统中的电源,它的稳态特性与暂态行为在电力系统中具有支配地位。虽然在电机学中已经学过同步电机,但那时侧重于基本电磁关系,而现在则从系统运行的角度审视发电机组。 1.同步发电机的相量图 设发电机以滞后功率因数运行,三相同步发电机正常运行时,定子某一相空载电势Eq,输出电压或端电压U和输出电流I间的相位关系如图2-1所示。δ是Eq领先U的角度,称为功角,是功率因数角,即U与I的相位差, Eq与q轴(横轴或交轴)重合,d为纵轴或直轴。U和I的d、q分量为: 图 2-1电势电压相量图 电机学课程中已经讨论过,端电压和电流的分量与Eq间的关系为: (2-3)
数控机床与数控技术综述报告 【摘要】数控机床——是数字控制机床的简称,是一种装有程序控制系统的自动化机床。数控机床与普通机床的主要区别在于:数控机床带有数控系统(程序控制系统),可以通过编制程序来实现自动化加工。而普通机床没有该特性。本文在介绍数控机床特点的基础之上,根据我国数控技术的现状,分析了国家在数控技术领域的研究工作以及国内外机床的发展趋势 【关键词】数控机床数控研究发展趋势 引言 数控机床及由数控机床组成的制造系统是改造传统产业、构建数字化企业的重要基础装备,它的发展一直备受人们关注。数控机床以其卓越的柔性自动化的性能、优异而稳定的精度、灵捷而多样化的功能引起世人瞩目,它开创了机械产品向机电一体化发展的先河,因此数控技术成为先进制造技术中的一项核心技术。另一方面,通过持续的研究,信息技术的深化应用促进了数控机床的进一步提升,进入21世纪,我国机床制造业既面临着提升机械制造业水平的需求而引发的制造装备发展的良机,也遭遇到加入WTO后激烈的市场竞争的压力。从技术层面上来讲,加速推进数控技术将是解决机床制造业持续发展的一个关键。 1.数控机床概述 1.1 数控机床的特点: 数控机床对零件的加工过程,是严格按照加工程序所规定的参数及动作执行的。它是一种高效能自动或半自动机床,与普通机床相比,具有以下明显特点:(1)适合于复杂异形零件的加工数控机床可以完成普通机床难以完成或根本不能加工的复杂零件的加工,因此在宇航、造船、模具等加工业中得到广泛应用。(2)加工精度高 (3)加工稳定可靠实现计算机控制,排除人为误差,零件的加工一致性好,质量稳定可靠。 (4)高柔性加工对象改变时,一般只需要更改数控程序,体现出很好的适应性,可大大节省生产准备时间。在数控机床的基础上,可以组成具有更高柔性的自动化制造系统—FMS。
电机数学模型 以二相导通星形三相六状态为例,分析BLDC的数学模型及电磁转矩等特性。为了便于分析,假定: a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。 则三相绕组的电压平衡方程可表示为: 错误!未找到引用源。(1) 式中:错误!未找到引用源。为定子相绕组电压(V);错误!未找到引用源。为定子相绕组电流(A);错误!未找到引用源。为定子相绕组电动势(V);L为每相绕组的自感(H);M为每相绕组间的互感(H);p为微分算子p=d/dt。 三相绕组为星形连接,且没有中线,则有 错误!未找到引用源。(2) 错误!未找到引用源。(3) 得到最终电压方程: 错误!未找到引用源。(4) e c c 图.无刷直流电机的等效电路 无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比 错误!未找到引用源。(5) 所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°
电角度,两者应严格同步。由于在任何时刻,定子只有两相导通,则:电磁功率可表示为: 错误!未找到引用源。(6) 电磁转矩又可表示为: 错误!未找到引用源。(7) 无刷直流电机的运动方程为: 错误!未找到引用源。(8) 其中错误!未找到引用源。为电磁转矩;错误!未找到引用源。为负载转矩;B为阻尼系数;错误!未找到引用源。为电机机械转速;J为电机的转动惯量。 传递函数: 无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示: 图2.无刷直流电机动态结构图 由无刷直流电机动态结构图可求得其传递函数为: 式中: K1为电动势传递系数,错误!未找到引用源。,Ce 为电动势系数; K2为转矩传递函数,错误!未找到引用源。,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,错误!未找到引用源。,G 为转子重量,D 为转子直径。基于MATLAB的BLDC系统模型的建立 在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,
现代数控技术及数控机床 一.填空题(每题2分) 1.数控机床是由控制介质、数控装置、伺服驱动装置、辅助控制装置、反馈装置、适应控制装置和机床等部分组成。 2.数控机床加工过程的加工路线是指刀具中心的运动轨迹和方向。 3.三相步进电机的转子上有40个齿,若采用三相六拍通电方式,则步进电机的步距角为 1.50。 4.数控机床的最小设定单位是数控机床能实现的最小位移量,标制着数控机床精度的分辨率,其值一般为0.0001~0.01mm,在编程时,所有的编程单位都应转换成与最小设定单位相应的数据。 5.通常把数控车床的床身导轨倾斜布置,可改善其排屑条件和受力状态。 提高机床的静刚度。 6.数控机床的工作台和刀架等部件的移动,是由交流或直流伺服电机驱动,经过滚珠丝杠传动,可减少进给系统所需要的驱动扭矩,提高定位精度、运动平稳性。 7.对步进电机施加一个电脉冲信号时,步进电机就回转一个固定的角度,叫做步距角,电机的总回转角和输入脉冲数成正比,而电机的转速则正比于输入脉冲的频率。 8.位置检测装置是数控机床的重要组成部分,在闭环系统中,它的主要作用是检测位移量,并发出反馈信号与数控装置发出的指令信号进行比较,如有偏差,经放大后控制执行部件,使其向着消除偏差方向运动,直至偏差等于零为止。
9.刀具半径补偿功能的作用就是要求数控系统根据工件轮廓程序和刀具中心偏移量,自动计算出刀具中心轨迹。 10.伺服系统的输入是插补器发出的指令脉冲,输出是直线或转角位移。11.数控机床工作台和刀架等部件的移动,由交流或直流伺服电机驱动,经过滚珠丝杠传动,减少了进给系统所需要的驱动扭矩,提高了定位精度和运动平稳性。 12.光栅依不同制造方法有透射光栅和反射光栅两种。数控机床中常用透射光栅做位置传感器。 二.选择题(每题2分) 1.闭环伺服系统使用的执行元件是(1,2) (1)支流伺服电机(2)交流伺服电机(3)步进电机(4)电液脉冲马达 2.步进电机的角位移与(4)成正比。 (1)步距角(2)通电频率(3)脉冲当量(4)脉冲数量 3.数控机床CNC系统是(3) (1)轮廓控制系统(2)动作顺序控制系统(3)位置控制系统(4)速度控制 系统 4.采用DDA法加工第一象限的斜线,若偏差函数值大于零,规定刀具向(1)方向移动。 (1)+X (2)-X (3)+Y (4)-Y 5.数控机床有不同的运动形式,需要考虑关键与刀具相对运动关系和坐标系方向,编写程序时,采用(4)的原则。
《数控技术与编程》(一) 一、名词解释 1. 基准:在测量工作中用作起始尺度的标准,用来确定生产对象上几何关 系所依据的点,线或面。 2. CAPP:CAPP(Computer Aided Process Planning)是指借助于计算机软硬 件技术和支撑环境,利用计算机进行数值计算、逻辑判断和推理等的功能来制定零件机械加工工艺过程 3. 加工余量:机械加工过程中,将工件上待加工表面的多余金属通过机械 加工的方法去除掉,获得设计要求的加工表面,零件表面预留的(需切除掉的)金属层的厚度称为加工余量。 二、简答题 1. 工序集中的特点。 2. 什么是插补运算,及其常用的插补运算方法。 3. 开环控制系统与半闭环控制系统区别。 4. 如何在数控铣床加工中设置刀具补偿。 参考答案: 1、工序集中的特点。 采用高效专用设备及工艺装备,生产率高。工件装夹次数减少,易于保证表面间位置精度,减少工序间运输量,缩短生产周期工序数目,减少机床数量、操作工人数和生产面积,还可以简化生产计划和生产组织工作。若采用结构复杂的专用设备及工艺设备,投资增大,调整和维修复杂,生产准备工作量大,转换新产品比较费时。 2、什么是插补运算,及其常用的插补运算方法。 插补:即在规定饿加工轮廓起点和终点之间计算出多个中间点的坐标值,以此控制机床各坐标轴的运动。常用的插补算法主要有脉冲增量插补法和数据采样插补法。 3、开环系统与半闭环系统的区别。 开环控制系统中,机床没有检测和反馈装置,数控装置发出的信号是单向的。同时它不纠正伺服系统的误差,所以这类机床的加工精度不高。但这类结构简单、调试方便、工作可靠、稳定性好、价格低廉。而闭环控制系统增加了比较电路和反馈装置,可以消除伺服机构中出现的误差,从而提高了机构精度。因此它在数控机床,特别是在精度要求高的大型和精密机床上应用十分广泛。 4、如何在数控铣床加工中设置刀具补偿。 刀具半径补偿如下。(1)刀补的建立。刀具中心从与编程轨迹重合过渡到与编程轨迹偏离一个偏置量的过程。(2)刀补的进行。执行G41,G42指令的程
安徽工业大学工商学院课程设计(论文)同步电机模型的MATLAB仿真 学生姓名:李春笋 学号:111842161 专业班级:气1142 指导教师:范国伟 2013年12月20日
摘要 采用电力电子变频装置实现电压频率协调控制,改变了同步电机历来的恒速运行不能调速的面貌,使它和异步电机一样成为调速电机大家庭的一员。本文针对同步电机中具有代表性的凸极机,在忽略了一部分对误差影响较小而使算法复杂度大大增加的因素(如谐波磁势等),对其内部电流、电压、磁通、磁链及转矩的相互关系进行了一系列定量分析,建立了简化的基于abc三相变量上的数学模型,并将其进行派克变换,转换成易于计算机控制的d/q坐标下的模型。再使用MATLAB中用于仿真模拟系统的SIMULINK 对系统的各个部分进行封装及连接,系统总体分为电源、abc/dq转换器、电机内部模拟、控制反馈四个主要部分,并为其设计了专用的模块,同时对其中的一系列参数进行了配置。系统启动仿真后,在经历了一开始的振荡后,各输出相对于输出时间的响应较稳定。关键词:同步电机 d/q模型 MATLAB SIMULINK 仿真。 The Simulation Platform of Synchronous Machine by MATLAB Abstract: The utilization of transducer realizes the control of voltage’s frequency. It changes the situation that Synchronous Machine is always running with constant speed. Just like Asynchronous Machine, Synchronous machine can also be viewed as a member of the timing machine. This thesis intends to aim at the typical salient pole machine in Synchronous Machine. Some quantitative analysis are made on relations of salient pole machine among current, voltage, flux, flux linkage and torque, under the condition that some factors such as harmonic electric potential are ignored. These factors have less influence on error but greatly increase complexity of arithmetic. Thus, simplified mathematic model is established on the basis of a, b, c three phase variables. By the Park transformation, this model is transformed to d, q model which, is easy to be controlled by computer. Simulink is used to masking and linking all the parts of the system. The system can be divided into four main parts, namely power system, abc/dq transformation, simulation model of the machine and feedback control. Special blocks are designed for the four parts and a series of parameters in these parts are configured. The results of simulation show that each output has a satisfactory response when there is disturbance. Key Words: Synchronous Machine Simulation d/q Model MATLAB SIMULINK
高考中常用函数模型.... 归纳及应用 一. 常数函数y=a 判断函数奇偶性最常用的模型,a=0时,既是奇函数,又是偶函数,a ≠0时只是偶函数。关于方程解的个数问题时常用。 例1.已知x ∈(0, π],关于方程2sin(x+ 3 π )=a 有两个不同的实数解,则实数a 的取植范围是( )A .[-2,2] B.[ 3,2] C.( 3,2] D.( 3,2) 解析;令y=2sin(x+3π ), y=a 画出函数y=2sin(x+3 π ),y=a 图象如图所示,若方程有两个不同的解,则两个函数图象有两个不同的交点, 由图象知( 3,2),选D 二. 一次函数y=kx+b (k ≠0) 函数图象是一条直线,易画易分析性质变化。常用于数形结合解决问题,及利用“变元”或“换元”化归 为一次函数问题。有定义域限制时,要考虑区间的端点值。 例2.不等式2x 2 +1≤m(x-1)对一切│m │≤2恒成立,则x 的范围是( ) A .-2≤x ≤2 B. 4 31- ≤x ≤0 C.0≤x ≤ 47 1+ D. 4 7 1-≤x ≤ 4 1 3- 解析:不等式可化为m(x-1)- 2x 2 +1≥0 设f(m)= m(x-1)- 2x 2 +1 若x=1, f(m)=-3<0 (舍) 则x ≠1则f(m)是关于m 的一次函数,要使不等式在│m │≤2条件下恒成立,只需? ? ?≥-≥0)2(0 )2(f f ,解之可得答案D 三. 二次函数y=ax 2 +bx+c (a ≠0) 二次函数是应用最广泛的的函数,是连接一元二次不等式和一元二次方程的纽带。很多问题都可以化归和转化成二次函数问题。比如有关三次函数的最值问题,因其导数是二次函数,最后的落脚点仍是二次函数问题。 例3.(1).若关于x 的方程x 2 +ax+a 2 -1=0有一个正根和一个负根,则a 的取值范围是( ) 解析:令f(x)= x 2 +ax+a 2 -1由题意得f(0)= a 2 -1 <0,即-1<a <1即可。 一元二次方程的根分布问题可借助二次函数图象解决,通常考虑二次函数的开口方向,判别式对称轴与根的位置关系,端点函数值四个方面。也可借助韦达定理。
同步电机数学模型的建立和仿真 姓名:包邻淋 专业:控制工程 学号:1402094
摘要 (3) 1同步电机数学模型的建立 (4) 1.1模型的导出思路 (4) 1.2变量置换用的表达式 (5) 1.4电机实用模型 (6) 1.5电机实用模型的状态空间表达式 (8) 1.6电机模型参数的确定 (10) 2 同步电机数学模型的仿真 (13) 2.1同步发电机仿真模型 (13) 2.2不同阶次模型的仿真分析 (14) 参考文献 (17)
摘要 一般发电机存在临诸多问题,建立精确地描述同步发电机的数学模型是十分必要的[1]。电力系统数字仿真因具有不受原型系统规模和结构复杂性限制,能保证被研究系统的安全性,且具有良好的经济性、方便性等优点。 常用的同步发电机数学模型由同步发电机电路方程及转子运动方程两部分组成。同步发电机电路方程又分为基本方程和导出模型两类[4]。对于不同的假设条件,同步发电机模型可作不同程度的简化,因此同步发电机的导出模型也有不同的形式。同一假设条件下,不同的同步发电机数学模型,其主要区别在于电机的转子绕组数,有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,则称之为转子7阶模型[5]。如果转子绕组数减少,则发电机方程组的阶数也相应减少。 本文通过MATLAB/simulink进行仿真计算,比较采用不同的同步发电机模型时,对系统的稳定性分析的影响。在此基础上提出在不同情况下进行电力系统仿真计算选取同步发电机数学模型的方法。
1同步电机数学模型的建立 1.1模型的导出思路 由于定转子间的相对运动,基于空间静止不动的三相坐标系所建立的原始方程,磁链方程式中会出现变系数,这对方程组的求解和模型的建立造成了很大的困难。现在通用的方法是对原始方程做d q变换(又称为派克变换),将原方程从a b c三相静止不动坐标系变为与转子相对静止的d q坐标系。 基本方程中有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,若设,则原方程为5阶,若转子运动方程为,;所含变量为,。。在化为实用模型时 和保留,用取代,再用5个磁链方程消去3个转子电流,以及2个定子磁链,而 则用实用变量代替。 经过上述思路导出的实用模型,除了以及引入的等效实用变量之外方程中系数都是同步电机技术参数中的电抗和时间
智慧树知到《数控技术与数控机床》章节测试答案 第一章 1、开环伺服系统的主要特征是系统内()位置检测反馈装置。 有 没有 某一部分有 可能有 答案: 没有 2、由于数控机床的辅助控制装置采用PLC进行控制,所以该部分变得十分简单。 对 错 答案: 对 3、数控机床进给驱动有机电组合进给驱动系统和直线电机直接驱动两种类型。 对 错 答案: 对 4、数控机床中PLC的类型有()。 带有分布式PLC的CNC系统 CNC系统与PLC通过系统总线相连 带有硬件集成PLC的CNC系统 带有软件集成PLC的CNC系统 答案: 带有分布式PLC的CNC系统,CNC系统与PLC通过系统总线相连,带有软件集成PLC 的CNC系统
5、CNC是一种配有专用操作系统的计算机控制系统。 对 错 答案: 对 6、数控机床运行高速化是通过()来实现的。 机床进给率高速化 主轴转速高速化 刀具交换高速化 托盘交换高速化 答案: 机床进给率高速化,主轴转速高速化,刀具交换高速化,托盘交换高速化 7、数控机床数控系统的发展经历了两个阶段,有六代产品。 对 错 答案: 对 8、多功能复合化机床可实现多种工序的加工,打破了传统的工序界限和分开加工的工艺规程。 对 错 答案: 对 9、1952年,美国PASONS公司和麻省理工学院(MIT)合作研制了第一台加工中心。 对 错
答案: 错 10、直线电机作为高效驱动元件在数控机床中正被广为应用,尤其在激光切割和高速加工中。 对 错 答案: 对 第二章 1、数控加工的插补过程,实际上是用微小的直线段来逼近曲线的过程。 对 错 答案: 对 2、数控系统所规定的最小设定单位是() 数控机床运动精度 数控机床加工精度 脉冲当量 数控机床传送精度 答案: 脉冲当量 3、插补运动的实际轨迹始终不一定与理想轨迹完全相同。 对 错 答案: 对 4、已知第一象限直线OA,起点O(0,0),终点A(5,8),使用数字积分法进行插补,累加器位数为()
数控技术及数控机床试卷 学生姓名:,班级:,学号:,成绩: ?填空题(每题4分,共36 分) 1 ?数控加工中的最基本问题就是根据所输入的零件加工程序中有关几何形状和_____ 的原始数据及其指令,通过相应的插补运算。按一定的关系向各个坐标轴的驱动控制器 分配_______ ,从而使得_________ 驱动工作台相对主轴的运动轨迹,以一定的精度要求逼 近于所加工的零件的外形轮廓尺寸。 2?按加工批量和零件的复杂程度,试在下图区域内标出通用机床、专用机床和数控机床的适用位置。 作为主运动的动力源。 5?数控机床的最小设定单位是 为 ___________________ ,在编程时, 的数据。 6?通常把数控车床的床身导轨倾斜布置,可改善其 刚度。 7?数控技术是___________ 的技术;计算机数控(CNC )是指__________________ ;数控机床具有 ____________ 、____________ 、_____________ 、_____________ 、____________ 等优点。 &插补器就实现的方法而言,可用________________ 或;按其实现的功能来分类,它可分为 _________ 、_________ 、__________ 等类型。 9?刀具半径补偿是指________________________________________________________________ 。 左偏刀具半径补偿指令和右偏刀具半径补偿指令分别为和。 二?简答题(每题6分,共18分) 1 ?何谓二轴半坐标数控机床? 2?试论述数控机床的进给伺服系统是由哪几部分组成,它们分别的作用如何?伺服系统常用的驱动元件是什么? 3?简述数控车床采用钢板焊接床身的原因。 三?计算题(10分) 若加工第一象限直线0E,起点为0(0, 0),终点为E(7, 4),设累加器为3位,试按DDA法进行插补计算,并绘出插补轨迹图。 四?论述题(每题9分,共36分) 1 ?试推导下图内的脉冲当量3与步距角a的关系式,假设已知各齿轮齿数和丝杠的导程。由于脉冲当量是规定的,步进电机一经选定后,其步距角也是一定的,试回答如何满足脉冲 当量与步距角中间的关系? 批量 3.功率步进大机 统。步进电卿的 双相通电方式, 4 ?为了保证数控机 發用于普通机床的数控改造,以及对精度要求较低的场合等 。对于三相步进电机, —系 当以 杂程度 床总是能在最有利的切削速度下进行加工,或实现桓速切削的功能, 。因此,现代数控机床常采用数控机床的主轴转速通常在其调速范围内 ,标制着数控机床精度的分辨率,其值一般 所有的编程单位都应转换成与最小设定单位相应 _________ 和________ 。提高机床的静 是指 卄 涉 搂弟电机
高中物理中常用的三角 函数数学模型强烈推 荐!!! Document number【AA80KGB-AA98YT-AAT8CB-2A6UT-A18GG】
高中物理中常用的三角函数数学模型 数学作为工具学科,其思想、方法和知识始终渗透贯穿于整个物理学习和研究的过程中,为物理概念、定律的表述提供简洁、精确的数学语言,为学生进行抽象思维和逻辑推理提供有效方法.为物理学的数量分析和计算提供有力工具。 高考物理试题的解答离不开数学知识和方法的应用,借助物理知识渗透考查数学能力是高考命题的永恒主题。可以说任何物理试题的求解过程实质上是一个将物理问题转化为数学问题经过求解再次还原为物理结论的过程。高考物理考试大纲对学生应用数学工具解决物理问题的能力作出了明确要求。 一、三角函数的基本应用 在进行力的分解时,我们经常用到三角函数的运算.虽然三角函数学生初中已经学过,但笔者在多年的教学过程中发现,有相当一部分学生经常在这里出问题,还有一部分学生一直到高三都没把这部分搞清楚.为此,本人将自己的一些体会写出来,仅供大家参考. (一)三角函数的定义式 (二)探寻规律 1.涉及斜边与直角边的关系为“弦”类,涉及两直角边的关系为“切”类; 2.涉及“对边”为“正”类,涉及“邻边”为“余”类; 3.运算符:由直角边求斜边用“除以”,由斜边求直角边用“乘以”,为更具规律性,两直角边之间互求我们都用“乘以”. (三)速写 第一步:判断运算符是用“乘以”还是“除以”; 第二步:判断用“正”还是用“余”; 第三步:判断用“弦”还是用“切”. 即(边)=(边)(运算符)(正/余)(弦/切) 1、由直角边求斜边 2、由斜边求直角边 3、两直角边互求 (四)典例分析 经典例题1如图1所示,质量为m 的小球静止于斜面与竖直挡板之间,斜面倾角为θ,求小球对挡板和对斜面的压力大小分别是多少 2所示。 θtan 1?=mg F 经典例题2如图3所示,质量为m ,挡 挡板和使球压紧斜面,重力的分解如图4所示。 二、三角函数求物理极值 因正弦函数和余弦函数都有最大值(为1 的基本形式,那么我们可以通过三角函数公式整理出正弦(或余弦)函数的基本形式,然 后在确定极值。现将两种三角函数求极值的常用模型归纳如下: 1.利用二倍角公式求极值 正弦函数二倍角公式θθθcos sin 22sin = 图3 图4
6.5 异步电动机的动态数学模型和坐标变换 本节提要 异步电动机动态数学模型的性质 三相异步电动机的多变量非线性数学模型 坐标变换和变换矩阵 三相异步电动机在两相坐标系上的数学模型 三相异步电动机在两相坐标系上的状态方程 一、异步电动机动态数学模型的性质 2. 交流电机数学模型的性质 (1)异步电机变压变频调速时需要进行电压(或电流)和频率的协调控制,有电压(电流)和频率两种独立的输入变量。在输出变量中,除转速外,磁通也得算一个独立的输出变量。因为电机只有一个三相输入电源,磁通的建立和转速的变化是同时进行的,为了获得良好的动态性能,也希望对磁通施加某种控制,使它在动态过程中尽量保持恒定,才能产生较大的动态转矩。 多变量、强耦合的模型结构 由于这些原因,异步电机是一个多变量(多输入多输出)系统,而电压(电流)、频率、磁通、转速之间又互相都有影响,所以是强耦合的多变量系统,可以先用图来定性地表示。
图6-43 异步电机的多变量、强耦合模型结构 模型的非线性 (2)在异步电机中,电流乘磁通产生转矩,转速乘磁通得到感应电动势,由于它们都是同时变化的,在数学模型中就含有两个变量的乘积项。这样一来,即使不考虑磁饱和等因素,数学模型也是非线性的。 模型的高阶性 (3)三相异步电机定子有三个绕组,转子也可等效为三个绕组,每个绕组产生磁通时都有自己的电磁惯性,再算上运动系统的机电惯性,和转速与转角的积分关系,即使不考虑变频装置的滞后因素,也是一个八阶系统。 总起来说,异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。 二、三相异步电动机的多变量非线性数学模型 假设条件: (1)忽略空间谐波,设三相绕组对称,在空间互差120°电角度,所产生的磁动势沿气隙周围按正弦规律分布; (2)忽略磁路饱和,各绕组的自感和互感都是恒定的; (3)忽略铁心损耗; (4)不考虑频率变化和温度变化对绕组电阻的影响。
数控技术和数控装备是制造工业现代化的重要基础。这个基础是否牢固直接影响到一个国家的经济发展和综合国力,关系到一个国家的战略地位。因此,世界上各工业发达国家均采取重大措施来发展自己的数控技术及其产业。 在我国,数控技术与装备的发展亦得到了高度重视,近年来取得了相当大的进步。特别是在通用微机数控领域,以PC平台为基础的国产数控系统,已经走在了世界前列。但是,我国在数控技术研究和产业发展方面亦存在不少问题,特别是在技术创新能力、商品化进程、市场占有率等方面情况尤为突出。在新世纪到来时,如何有效解决这些问题,使我国数控领域沿着可持续发展的道路,从整体上全面迈入世界先进行列,使我们在国际竞争中有举足轻重的地位,将是数控研究开发部门和生产厂家所面临的重要任务。 为完成此任务,首先必须确立符合中国国情的发展道路。为此,本文从总体战略和技术路线两个层次及数控系统、功能部件、数控整机等几个具体方面探讨了新世纪的发展途径。 1 总体战略 制定符合中国国情的总体发展战略,对21世纪我国数控技术与产业的发展至关重要。通过对数控技术和产业发展趋势的分析和对我国数控领域存在问题的研究,我们认为以科技创新为先导,以商品化为主干,以经管和营销为重点,以技术支持和服务为后盾,坚持可持续发展道路将是一种符合我国国情的发展数控技术和产业的总体战略。 1.1 以科技创新为先导 中国数控技术和产业经过40多年的发展,从无到有,从引进消化到拥有自己独立的自主版权,取得了相当大的进步。但回顾这几十年的发展,可以看到我们在数控领域的进步主要还是按国外一些模式,按部就班地发展,真正创新的成分不多。这种局面在发展初期的起步阶段,是无可非议的。但到了世界数控强手如林的今天和知识经济即将登上舞台的新世纪,这一常规途径就很难行通了。例如,在国外模拟伺服快过时时,我们开始搞模拟伺服,还没等我们占稳市场,技术上就已经落后了;在国外将脉冲驱动的数字式伺服打入我国市场时,我们就跟着搞这类所谓的数字伺服,但至今没形成大的市场规模;近来国外将数字式伺服发展到用网络(通过光缆等)与数控装置连接时,我们又跟着发展此类系统,前途仍不乐观。这种老是跟在别人后面走,按国外已有控制和驱动模式来开发国产数控系统,在技术上难免要滞后,再加上国外公司在我国境内设立研究所和生产厂,实行就地开发、就地生产和就地销售,使我们的产品在性能价格比上已越来越无多大优势,因此要进一步扩大市场占有率,难度自然就很大了。 为改变这种现状,我们必须深刻理解和认真落实“科学技术是第一生产力”的伟大论断,大力加强数控领域的科技创新,努力研究具有中国特色的实用的先进数控技术,逐步建立自己独立的、先进的技术体系。在此基础上大力发展符合中国国
重庆名校精华中学08届高考一轮复习教案函数模型及其应用 一.课标要求: 1.利用计算工具,比较指数函数、对数函数以及幂函数增长差异;结合实例体会直线上升、指数爆炸、对数增长等不同函数类型增长的含义; 2.收集一些社会生活中普遍使用的函数模型(指数函数、对数函数、幂函数、分段函数等)的实例,了解函数模型的广泛应用。 二.命题走向 函数应用问题是高考的热点,高考对应用题的考察即考小题又考大题,而且分值呈上升的趋势。高考中重视对环境保护及数学课外的的综合性应用题等的考察。出于“立意”和创设情景的需要,函数试题设置问题的角度和方式也不断创新,重视函数思想的考察,加大函数应用题、探索题、开放题和信息题的考察力度,从而使高考考题显得新颖、生动和灵活。 预测2007年的高考,将再现其独特的考察作用,而函数类应用题,是考察的重点,因而要认真准备应用题型、探索型和综合题型,加大训练力度,重视关于函数的数学建模问题,学会用数学和方法寻求规律找出解题策略。 (1)题型多以大题出现,以实际问题为背景,通过解决数学问题的过程,解释问题; (2)题目涉及的函数多以基本初等函数为载体,通过它们的性质(单调性、极值和最值等)来解释生活现象,主要涉计经济、环保、能源、健康等社会现象。 三.要点精讲 1.解决实际问题的解题过程 (1)对实际问题进行抽象概括:研究实际问题中量与量之间的关系,确定变量之间的主、被动关系,并用x、y分别表示问题中的变量; (2)建立函数模型:将变量y表示为x的函数,在中学数学内,我们建立的函数模型一般都是函数的解析式; (3)求解函数模型:根据实际问题所需要解决的目标及函数式的结构特点正确选择函数知识求得函数模型的解,并还原为实际问题的解. 这些步骤用框图表示: 2 (1)阅读理解、整理数据的能力:通过分析、画图、列表、归类等方法,快速弄清数据之间的关系,数据的单位等等; (2)建立函数模型的能力:关键是正确选择自变量将问题的目标表示为这个变量的函数,建立函数的模型的过程主要是抓住某些量之间的相等关系列出函数式,注意不要忘记考察函数的定义域; (3)求解函数模型的能力:主要是研究函数的单调性,求函数的值域、最大(小)值,计算函数的特殊值等,注意发挥函数图象的作用。 四.典例解析
MATLAB在异步电机仿真中的应用 摘要:在同步旋转坐标系上(M、 T 坐标系) 推导出异步电机数学模型, 并应用 MATLAB/ SIMULINK 对其进行实际仿真,并且运用电机的参数验证了所建模型的正确性,并得出电机转速、电机稳定运行三相电流、电机转矩图。 关键词:仿真异步电机数学模型 MATLAB 一、引言 Matlab 语言是一种面向科学工程计算的高级语言,它集科学计算自动控制信号处理神经网络图像处理等功能于一体,是一种高级的数学分析与运算软件,可用作动态系统的建模和仿真。 目前,电机控制系统越来越复杂,不断有新的控制算法被采用仿真是对其进行研究的一个重要的不可缺少的手段 Matlab 的仿真研究功能成功方便地应用到各种科研过程中。 本文将结合Matlab/Simulink 的特点,介绍异步电动机在同步旋转坐标系(M 、T 坐标系)的数学建模与仿真方法在建模与仿真之后,可利用Simulink 将模型封装起来,使用时只需调用该模型并输入电机参数即可,为变频调速系统及控制方法的仿真研究提供了一种性能可靠使用方便的电机通用仿真模型。 异步电机的动态模型是高阶、非线性、强耦合的多变量系统 ,通过坐标变换的方法对其进行简化后 , 模型简单得多, 但其非线性、多变量的本质并未改变。描述电机的仍是一组高阶、变系数的微分方程,用传统的方法对其进行仿真分析并非易事。为了解决这一难题,本文利用异步电动机在同步旋转坐标系上(M、T 坐标系)的电压方程、磁链方程、转矩方程、运动方程实现了异步电动机的模型。 建立好数学模型之后。利用MATLAB/SIMULINK仿真软件成功搭建在同步旋转坐标系下的电机的数学模型。使得模型的建立更加简洁、明了,充分利用MATLAB/ SIMULINK提供的模块,建立了普通异步电动机的仿真模型,并对实际电机进行了仿真。 二、异步电机的仿真数学模型 利用MATLAB 进行电机运行状态仿真,最为关键的是建立起一个方便于仿真的电机模型。在本文的实例中,将在同步旋转两相坐标系下对一个直接接入三相电网的异步鼠笼电机建立一个可方便用于SIMULINK仿真的电机模型。 为了区分于一般的同步旋转 d、q 坐标系统,这里采用M、T坐标轴代替d、 q轴,且令M 轴与电机中转子总磁链ψ 2方向一致(转子总磁链ψ 2 等于气隙磁链 ψ g 与转了漏磁链ψ 21 之和),即把M轴定向到ψ 2 的方向。由于ψ 2 固定在M轴方 向上,所以转子磁链在T轴方向上就没有分量, 即ψ M2=ψ 2 。而转换到两相同步旋
长江三峡水电枢纽
同步汽轮发电机的转子同步水轮发电机的转子气隙 定子 同步发电机的FLASH.SWF 11
定子上3个等效绕组 a 相绕组 b 相绕组 c 相绕组 转子上3个等效绕组 同步发电机简化为:定子3个绕组、转子3个绕组、气隙、定子铁心、转子铁心组成的6绕组电磁系统励磁绕组 d 轴等效的阻尼绕组轴等效的阻尼绕组Q 15d 轴 q 轴120度 120度 120度 定子、转子铁心同轴(忽略定、转θ sin )M F =磁动势零点 θ 的,无饱和,无磁滞和涡流损耗,
19 磁链与电流、电压的参考正方向 1、设转子逆时针旋转为旋转正方向; 3、定子三相绕组端电压的极性与相电流正方向按发电机惯例来定义,即 正值电流i a 从端电压u a 的正极流出发电机,b 、c 相类似。 定子绕组的正电流产生负的磁链!! 2、定子三相绕组磁链ψa ,ψb ,ψc 的正方向与a 、b 、c 三轴正方向一致; + -21 5、d轴上的励磁绕组f、阻磁链正方向与d轴磁链正方向与q轴的正方向一致;正电流由端电压,因此绕组电阻: a 相绕组 b 相绕组 c 相绕组 +
26 励磁绕组d 轴阻尼绕组 轴阻尼绕组 绕组、 28 绕组的磁链方程-6个 定子绕组的磁链a 相绕组的磁链= a 相绕组电流产生的自磁链+ b 相绕组电流产生的互磁链+ c 相绕组电流产生的互磁链+励磁绕组电流产生的互磁链+D 绕组电流产生的互磁链 + Q 绕组电流产生的互磁链
31 转子绕组的磁链励磁绕组的磁链= a 相绕组电流产生的互磁链+ b 相绕组电流产生的互磁链+ c 相绕组电流产生的互磁链+励磁绕组电流产生的自磁链+D 绕组电流产生的互磁链+ Q 绕组电流产生的互磁链 36 a 相绕组磁路磁阻(磁导)的变化与转子d 轴与a 相绕组轴线的夹角θa (=ωt )有关 磁路的磁导λaa ,自感L aa 为θa 的周 期函数,周期为π。 θa θa =±π/2 磁路磁导最小,自感最小 a θa =0,π磁路磁导最大,自感最大 a
总分: 100分考试时间:分钟 单选题 1. 存储器包括只读存储器和随机存储器,只读存储器英语缩写_____(5分) (A) CRT (B) PIO (C) ROM (D) RAM 参考答案:C 2. 单片机是_____(5分) (A) 微型计算机 (B) 计算机系统 (C) 微机系统 (D) 微处理器 参考答案:A 3. DNC系统是指_____(5分) (A) 自使用控制 (B) 计算机数控 (C) 柔性制造系统 (D) 计算机辅助系统 参考答案:B 4. 在N0 5.G02,X+-042.Y+-042.Z+-,F04指的是_____(5分) (A) 进给速度 (B) 主轴转速 (C) 刀具代码 (D) 辅助功能字 参考答案:A 5. 存储器的容量单位中1GB=_____(5分) (A) 1000KB (B) 1024KB (C) 1000MB (D) 1024MB 参考答案:D 6. 数控机床的组成部分包括_____(5分) (A) 输入装置、光电阅读机、PLC装置、伺服系统、多级齿轮变速系统、刀库 (B) 输入装置、程序载体、CNC装置、伺服系统、位置反馈系统、机械部件 (C) 输入装置、程序载体、PLC装置、伺服系统、开环控制系统、机械部件
(D) 输入装置、CNC装置、多级齿轮变速系统、位置反馈系统、刀库 参考答案:B 7. 数控机床的组成部分包括_____(5分) (A) 输入装置、光电阅读机、PLC装置、伺服系统、多级齿轮变速系统、刀库 (B) 输入装置、程序载体、CNC装置、伺服系统、位置反馈系统、机械部件 (C) 输入装置、程序载体、PLC装置、伺服系统、开环控制系统、机械部件 (D) 输入装置、CNC装置、多级齿轮变速系统、位置反馈系统、刀库 参考答案:B 8. 在编写数控加工指令时,以下那个代码代表的是逆时针圆弧插补指令_____(5分) (A) G01 (B) G02 (C) G03 (D) G90 参考答案:C 9. 计算机数控系统的优点不包括_____(5分) (A) 利用软件灵活改变数控系统功能,柔性高 (B) 充分利用计算机技术及其外围设备增强数控系统功能 (C) 数控系统功能靠硬件实现,可靠性高 (D) 系统性能价格比高,经济性好 参考答案:C 10. 对于卧式数控车床的坐标系,一般以主轴上夹持的工件最远端面作为Z轴的基准点,则Z轴的正方向是_____(5分) (A) 从此基准点沿床身远离工件的方向 (B) 从此基准点沿床身接近工件的方向 (C) 从此基准点垂直向上的方向 (D) 从此基准点垂直向下的方向 参考答案:A 填空题 11. 能够自动改变机床切削用量,以便实时的适应机床加工状态的控制系统称为___(1)__ _ (5分) (1). 参考答案: 自适应控制系统 12. 确定数控机床坐标系时首先要确定___(2)___ ,它是沿提供切削功率的主轴轴线方向。(5分) (1). 参考答案: Z轴 (1).