液压建模与系统仿真结课作业
直动式溢流阀的动态特性仿真
姓名郑文婧
学号132085206011
学院能源与动力工程
专业动力工程
2014年7月10日
直动式溢流阀的动态特性仿真
溢流阀一种压力控制阀,在液压设备中主要起定压溢流作用,稳压作用,系统卸荷作用和安全保护作用。定压溢流作用:在定量泵节流调节系统中,定量泵提供的是恒定流量,当系统压力增大时,会使流量需求减小,此时溢流阀开启,使多余流量溢回油箱,保证溢流阀进口压力,即泵出口压力恒定(阀口常随压力波动开启)。稳压作用:溢流阀串联在回油路上,溢流阀产生背压运动部件平稳性增加。系统卸荷作用:在溢流阀的遥控口串接溢小流量的电磁阀,当电磁铁通电时,溢流阀的遥控口通油箱,此时液压泵卸荷,溢流阀此时作为卸荷阀使用。安全保护作用:系统正常工作时,阀门关闭,只有负载超过规定的极限(系统压力超过调定压力)时开启溢流,进行过载保护,使系统压力不再增加(通常使溢流阀的调定压力比系统最高工作压力高10%~20%)。
1、基于Matlab 的直动式溢流阀的仿真
1.1、液压系统及动态过程
任何一个液压元件总是在某一定的液压系统中工作的。在绘制功率键合图,进行动态分析时,总是针对某一具体动态过程进行研究的。
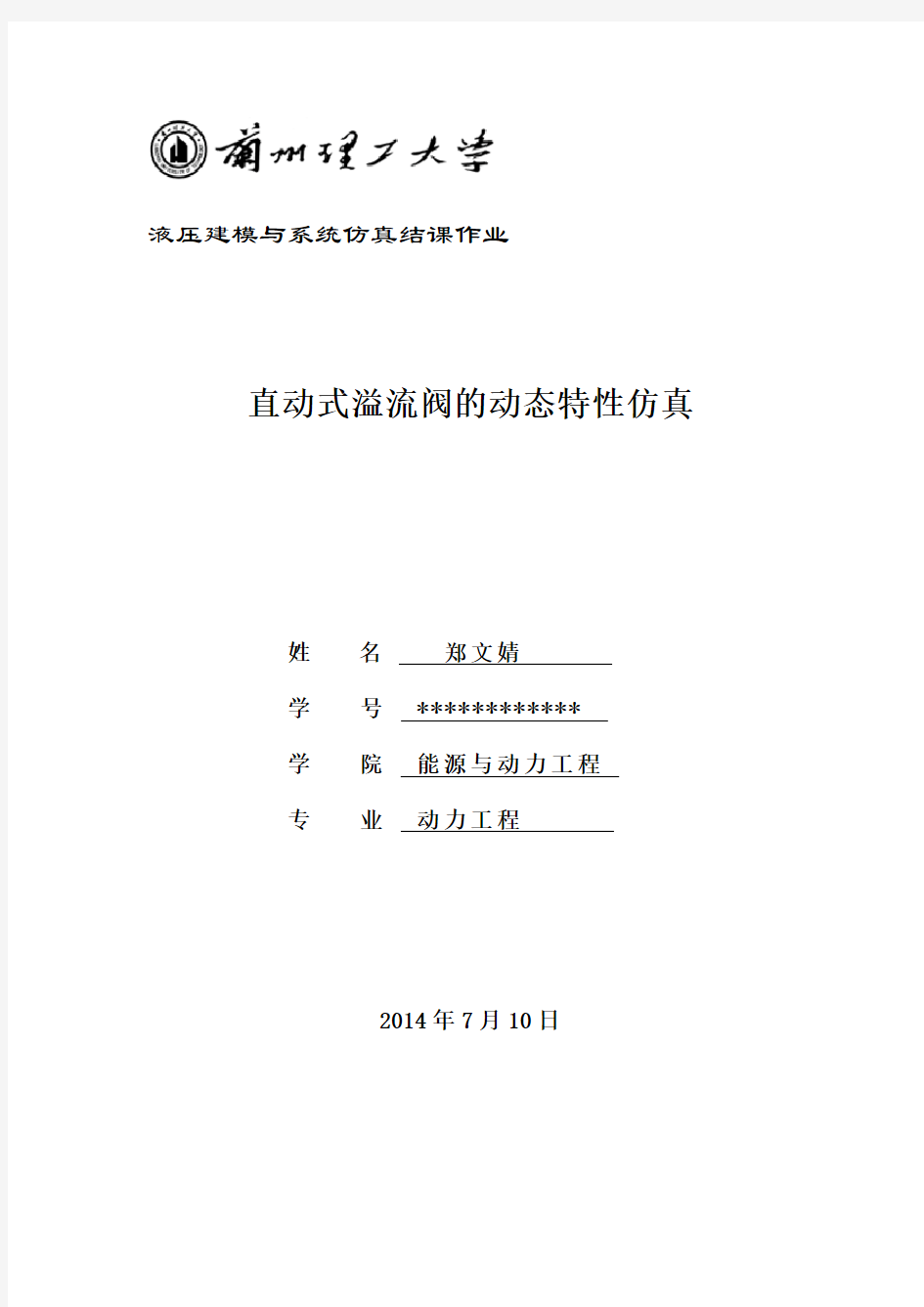
本研究的直动式溢流阀调压系统的液压原理图如图1-1所示。在图中所示情况下,液压泵的供油经电磁阀流回油箱,当电磁阀突然通电关闭时,直动式溢流阀由原来的关闭状态到打开溢流,直到系统达到新的静平衡状态的瞬态响应过程。
图1.1-1 直动式溢流阀调压系统的液压原理图
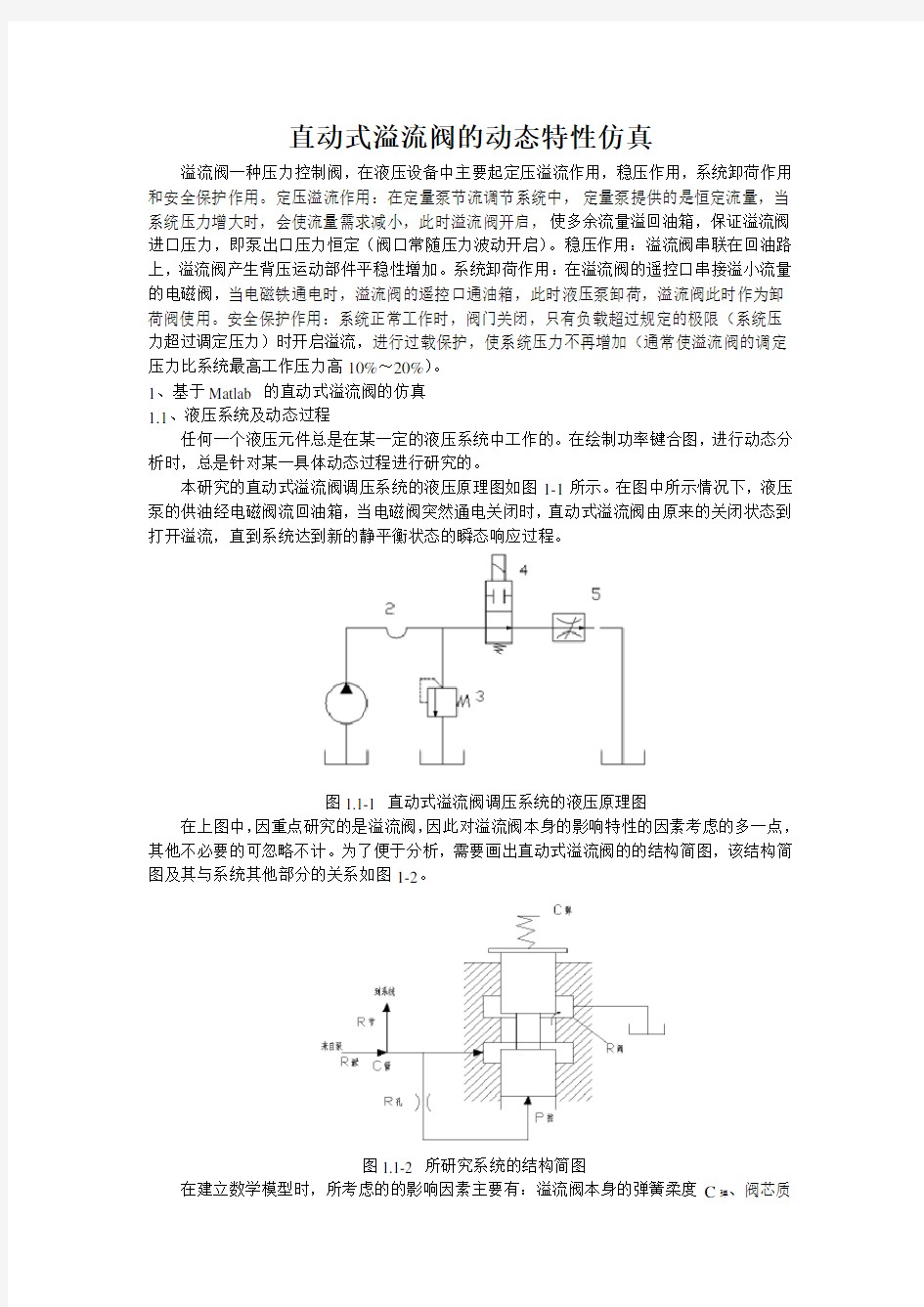
在上图中,因重点研究的是溢流阀,因此对溢流阀本身的影响特性的因素考虑的多一点,其他不必要的可忽略不计。为了便于分析,需要画出直动式溢流阀的的结构简图,该结构简图及其与系统其他部分的关系如图1-2。
图1.1-2 所研究系统的结构简图
量I 阀、阀口液阻R 阀、阻尼孔液阻R 孔,及阀芯底部控制油压力p 控。此外,系统其他部分考虑的因素有:泵的泄露液阻R 泄、管道(主要是软管)液容C 管及模拟负载的节流阀液阻R 节。
1.2、功率键合图
按照键合图理论,描述一个系统主要使用容性元件C 、阻性元件R 、惯性元件I 、流源S f 、力源Se 、转换器TF 。将这些基本元件按照功率流程连接起来,构成系统的键合图。如图2-1。
图1.2-1 功率键合图
图中带箭头的直线表示功率键,箭头表示功率流向。每一根功率键上有表示构成功率的两个变量,一般用力变量e 和流变量f 表示,但在传递不同类型能量的系统中,力变量和流变量各有其不同的物理变量。每根键上的变量都有脚标,以示区别。
图中功率流程是从左向右的。第一个结点是0结点,表示定量泵供给的具有确定流量q1的流源Sf ,在同一压力下有5个分支功率从容腔流出,其中有4个是受作用元控制的,即控制泵泄漏量q3的泄露液阻R 泄、控制管道中油液压缩所补充的流量q2的液容C 管、控制供给负载流量q4的节流阀液阻R 节以及控制溢流量q5的溢流阀阀口液阻R 阀,另一个分支功率是用于控制阀芯运动的P6.q6。第二个结点是1结点,表示功率流p6.q6在同一流量下又分成两个功率流,其一是受阻尼孔液阻R 孔控制,具有压力损失p7,相应的功率损失为p7.q7,另一支液压功率流p8.q8,经变换器TF 转换成机械功率F9.v9,作用在阀芯底部来控制阀芯运动。最后一个结点为1结点,功率流F9.v9在同一运动速度下,其力变量F 经3个分支功率流,分别用于克服弹簧的预压紧力F10、弹簧继续受压产生的弹性力F11、以及用于克服惯性力F12以产生阀芯的加速度a12 。 1.3、状态方程
1.3.1、 确定状态变量
在推导系统动态过程的数学模型——状态方程时,首先要确定状态变量系统的状态方程是一阶微分方程组,在其变量间有导数关系;而在系统的功率键合图中,只有储能作用元,(容性元C 和感性元I )中才有导数或积分关系,所以应当从C 和I 作用元各自的变量间取一个变量作为状态变量。
对于C 作用元,其自变量为流变量,力变量与流变量间的关系有
?=
vdt C F 1或?=qdt C
p 1
?=
Fdt I v 1或?
=pdt I q 1 为了便于建立状态方程,可以取C 元和I 元功率键上自变量对时间的积分为状态变量,
即在以下各式中:
??==V qdt x vdt , 和 ??==P pdt P Fdt ,
取液体体积V 、运动件位移x 、固体或液体动量P 为状态变量,这些状态变量的一阶导数即为原来的自变量。这样原来的功率键上的变量之间的积分关系就可以转换为状态变量和原来的因变量之间的代数关系,即
v C p x C F 1,1==
和 P I
q P I v 1,1== 按照上述方法,在图2-1所示的直动式溢流阀的功率键合图中,C 管和C 弹功率键上的
自变量分别为流量q2和速度v11;I 阀功率键上的自变量为F12,取自变量对时间的积分为状态变量,即
12
121111,,2F P v x q V === 1.3.2 推导状态方程
① 先写出功率键合图中储能元功率键上原来因变量与状态变量间的关系,即
12121P I v 阀=
, 11
111x C F 弹=, 21
2V C p 管
= ② 应用键合图的规则及其变量间的逻辑关系,将各状态变量的一阶导数推导成储能元
功率键上的因变量及输入变量的代数式函数关系,如下列各式:
12
222121111111222118111091212)111(Av p R R R S q V v v x
F S v R A Ap F S Ap F F F F P f e e -++-====---=--=--==阀
节泄孔
③ 将第一步中的各关系式带入第二步中,并在所得的右端的代数式中,按所列函数的顺序写出状态变量P12、x11、V2的各项,再写出输入变量的各项。如下列各式:
???
??
???
???+++--==-+--=f
e S V C R R R P I A V P I x S V C A x C P I R A P 212212
11211
122
121)111(11管阀节泄阀阀
管弹阀孔 这就是一个三阶的状态方程,它由3个一阶微分方程组成。
1.3.3确定状态方程中的各量值
阀芯承压面积24
d A π
=
,取d=1.2cm ,得A=1.13cm 2 ;
移动件的等效质量kg m m I 2-1015.63
1
?=+
=弹阀阀; 阻尼孔液阻3/1092.34cm s Pa R ??=孔; 弹簧柔度C 弹=0.002cm/N ;
泄油液阻35/1047.1cm s Pa R ??=泄; 软管液容3/108.06-cm Pa C ?=管; 当电磁阀关闭时,∞=节R ,即
01
=节
R 。由R 节可以确定系统压力的初始值。在确定溢流阀口液阻R 阀时,当溢流阀阀芯的位移量x11未超过阀口的遮盖量x1时,无溢流,
∞=阀R ,当x11>x1时,才有溢流,此时
2
1112
11122)(2
2
)(V x x C d
C p x x d C Q R p R C V d d -=-===管
溢阀阀管ρπρπ
式中 C d ——阀口的流量系数;d ——阀芯直径;ρ——油液密度。
可以看出Q 溢是x 11和V 2的非线性函数。因此系统的模型也必须用非线性的状态方程表示,即
???
???
??????
?>--+++--=≤+++--==-+--=)()(21)111(1)111(1111121112122
1
11212212
11211
12212x x V x x C d C S V C R R R P I A V x x S V C R R R P I A V P I x S V C A x C P I R A P d f f e 管管阀节泄阀管阀节泄阀阀
管
弹阀孔)(ρπ
阀芯的遮盖量取x1=0.14cm ,弹调C x x A p Se /)21(+-?=,s m S f /106.434
-?=。
在仿真过程中需对模型加3个约束。①011≥x ,;②02≥P ,否则为0;③011=x 时,
F 12<0,令F 12=0。
1.4、Matlab 仿真
将以下直动式溢流阀动态仿真程序清单用Matlab 仿真,得到阀芯的运动速度v11、油压P2和阀芯位移x11的仿真曲线,如图4-1。
%define the sequence of the program
function syms
[A,B,U,Y,M]=defination_matrix();
[H,D,I,R1,C2,C1,R2,P,Cd,RO,Q0,X1,P0,G]=input_parameters();
[X2,C,A1] = calculation_parameters(Q0,Cd,P,R2,D,RO,G);
[M]=calculation_matrix(M,A,B,U,Y,I,R1,C2,C1,R2,P0,P,X1,X2,A1,Q0,H,C); graph_plot(M);
function [A, B ,U, Y, M] = defination_matrix()
%A_state_matrix
A=zeros(3,3);
%B_input_matix
B=zeros(3,2);
%U_input_vector
U=zeros(2,1);
%Y=_state_vector
Y=zeros(3,1);
%output_matrix
M=zeros(1000,4)
function [H,D,I,R1,C2,C1,R2,P,Cd,RO,Q0,X1,P0,G] = input_parameters() %步长H(s),阀芯直径D(cm),惯性质量I(kg),阀孔阻尼R1(bar_s/cm3),弹簧柔度C2(cm/kg),
%管道液容C1(cm3/bar),泄油系数Cd,油液密度RO(kg/cm3),泵理论流量Q0(cm3/s),
%阀口遮盖量X1(cm),重力加速度G(cm/s2)
H=6e-5;D=1.2;I=6.3e-5;R1=0.4;R2=1.5;C2=0.02;C1=0.08;P=30;Cd=0.7;RO=0. 0009;
Q0=460;X1=0.14;P0=6;G=981;
function[X2,C,A1]=calculation_parameters(Q0,Cd,P,R2,D,RO,G)
PI=3.1415926;
X2=(Q0-P/R2)/(Cd*PI*D*sqrt(2*G*P/RO));
C=-Cd*PI*D*sqrt(2*G*P/RO);
A1=PI*D*D/4;
function[M]=calculation_matrix(M,A,B,U,Y,I,R1,C2,C1,R2,P0,P,X1,X2,A1, Q0,H,C)
T=0;
A(1,1)=-A1*A1*R1/I; A(1,2)=-1/C2; A(1,3)=A1/C1;
A(2,1)=1/I; A(3,1)=-A1/I; A(3,3)=-1/(R2*C1);
B(1,1)=-1; B(3,2)=1;
U(1)=P*A1-(X1+X2)/C2; U(2)=Q0;
Y(1)=0; Y(2)=0; Y(3)=P0*C1;
M(1,1)=0; M(1,2)=Y(1)/I; M(1,3)= Y(2);M(1,4)=P0;
for j=1:5000
[Y,T]=R_T(A,B,U,Y,H,X1,C,C1,T);
M(j+1,1)=T; M(j+1,2)=Y(1)/I; M(j+1,3)=Y(2); M(j+1,4)=Y(3)/C1;
function[Y,T]=R_T(A,B,U,Y,H,X1,C,C1,T)
%constrain
if Y(2)<0
Y(2)=0;
end
if Y(2)==0&&Y(1)<0
Y(1)=0;
end
%nonlinear_situation
if Y(2)>X1
A(3,3)=A(3,3)+C*(Y(2)-X1)*sqrt(Y(3)/C1); end
W=1/3*[0.5,1,1,0.5];
Q=[0.5,0.5,1,0];
TW=T; BB=Y; YW=Y;%初始化
for i=1:4
Dy=A*Y+B*U;
T=TW+W(i)*H;
Y=YW+H*Q(i).*Dy;
BB=BB+H*W(i).*Dy;
end
Y=BB;
if Y(2)<0
Y(2)=0;
else
if Y(2)==0&&Y(1)<0
Y(1)=0;
end
end
function graph_plot(M)
%%plot_graph
figure(1);
plot(M(:,1),M(:,2))
figure(2);
plot(M(:,1),M(:,3))
figure(3);
plot(M(:,1),M(:,4));
(a )溢流阀压力曲线图
(b )阀芯位移曲线图
1.4-1 直动式溢流阀动态仿真曲线
从仿真结果看出,直动式溢流阀在以上参数下,经历0.01s 后,基本趋于稳定,在阀芯位移为0.15cm 时,溢流阀的压力稳定在30bar 左右不变。
压力超调量%30%7330
3052>=-=?=
p p η 2、基于AMESim 的直动式溢流阀的仿真
2.1、直动式溢流阀的AMESim 模型
对于大多数元件而言,AMESim 没有直接给出虚拟的元件模型,需要通过该软件中的HCD(Hydraulic Component Design)库来自行建立。现通过该库对直动式溢流阀建立仿真模型,如图2.1-1。
图2.1-1 直动式溢流阀的AMESim 模型
2.2、仿真及其结果分析
首先根据Matlab 仿真模型所设定的参数,设定AMESim 模型中各元件的参数,如下表1所示:
表1 直动式溢流阀的AMESim 模型参数
Submodel Title Value
Flowsource[QS00] flow rate at start of stage 1 27.6 Flowcontrol101-1 [OR0000] equivalent orifice diameter 0.3 Flowcontrol101 [OR0000] equivalent orifice diameter 2 General hydraulic chamber [HC00] volume of chamber
1 Bap
2 [BAP12]
piston diameter 12 Mass friction endstops [MAS005] mass
6.3 Bap1 [BAP12] piston diameter
12
Bao1[BA0011] underlap corresponding to zero displacement -1.4
spool diameter 12 Final time 0.05 Print interval
6e-5
对直动式溢流阀的AMESim 模型进行仿真,得到其压力曲线图以及阀芯位移曲线图,如图2.2-1(a )和(b )。
从仿真结果看出,用AMESim 对直动式溢流阀在以上参数下仿真后,经历0.02s 后,溢流阀基本趋于稳定,在阀芯位移为1.6mm 时,溢流阀的压力稳定在31.8bar 不变。
压力超调量%30%638
.318.3152>=-=?=
p p η
(a)溢流阀压力曲线图
(b) 溢流阀阀芯位移曲线图
图2.2-1 直动式溢流阀的AMESim 仿真结果
3、两种仿真方法的对比分析
当溢流阀的溢流量由零阶跃变化至额定流量时,其进口压力迅速升高并超过其调节压力值,然后逐步减到最终的稳定压力,这一过程就是溢流阀的动态响应过程。其动态性能指标有压力超调量、响应时间、过度时间、升压时间、泄压时间。
将Matlab仿真结果与AMESim仿真结果进行比较分析,动态响应比较如下表2
表2 动态响应比较
建模方法压力超调量稳定压力阀芯位移响应时间稳定时间
Matlab程序73% 30bar 1.4mm 0.001 0.01s
AMEsim 63% 31.8bar 1.6mm 0.005 0.02s
表3 原因分析
建模方法原因分析
Matlab程序仿真质量较小,故响应时间短
AMEsim 阻尼较matlab程序大,响应时间较长,考虑液容、泄露影响,超调较小
平衡阀调试手册欧文托普阀门系统(北京)有限公司
欧文托普静态平衡阀介绍 静态平衡阀亦称手动平衡阀,数字锁定平衡阀,它的作用对象是系统的阻力,能够将新的水量按照设计计算的比例平衡分配,各支路同时按比例增减,仍然满足当前气候需要下的部分负荷的流量需求,起到平衡输配的作用。 手动平衡阀的作用对象是系统的阻力,基本功能:消除环路剩余压头限定环路 水流量。 手动平衡阀与普通截止阀区别在于,调节对象,手动平衡阀调节对象是系统的阻力,而普通截止阀主要调节阀前、阀后起关断作用的,它们阀门特性曲线,如下图所示,平衡阀理论流量特性为等百分比(近似)特性,当阀权度30-50%,实际为 线性流量特性。 1、手动截止阀特性曲线; 2、线性特性[阀实际工作曲线、阀权度0.2] 3、线性特性曲线; 4、等百分比特曲线; 手动平衡阀与普通截止阀不同之外还在于有开度指示、开度锁定装置及阀体上有两个测压口。在管网平衡调试时,用软管将被调试的平衡阀测压口与专用欧文托普的流量测量计算机或压差测量仪连接,仪表能显示出流经阀门流量值或压降值,进而可计算出阀 门的实际流量。
平衡阀测量流量原理:从流体力学观点看,平衡阀相当于一个局部阻力可以改变的节流元件,以压缩液体为例,由流量方程式可得: Q=K v·△P?(1-1) Q—流经平衡阀的流量(m3/h) K v—阀门系数 △P?—阀前、阀后压差(kg./cm2)平衡阀每一个开度值都对应于一个K v值,即阀门系数K v由开度而定。通过试验台实测可以获得不同开度下对应的阀门系数。于是,只需在现场测出压差,根据公式(1-1),就可以计算出流量Q,平衡阀便可以作为定量调节流量的节流部件了。 平衡阀特性: ①流量特性线性好。这一特性对方便准确地调整系统平衡具有重要意义。 ②有清晰、准确的阀门开度指示。开度指示在阀柄侧部,更人性的设计,使检 测、调试更方便。 ③平衡调试后,阀门锁定功能使开度值不能随便地被变更。无关人员不能随便开大阀门开度。如果管网环路需要检修,仍可以关闭平衡阀,待修复后开启阀门原 设定位置为止。 ④平衡阀阀体上有两个测压口,在管网平衡调试时,用软管与欧文托普的专用流量测量计算机或压差测量仪连接,能由计算机显示出流量值及计算出该阀门的实 际流量。
(一)结构简图 为了建立直动式溢流阀的数学模型,需要首先画出它的结构简图。结构简图并不代表所研究对象的具体结构,但是要能反映出该研究对象的物理特征,以能正确的写出数学模型。 直动式溢流阀的结构简图见图1-1。系统中的工作油液在压力p下,以流量q进入溢流阀,其中一部分流量q经阀口排人油箱,另一部分流量流经阻尼空进入阀芯地部,以控制阀芯发开口量x。因为阻尼孔有液阻R,油液流经阻尼孔时有压力消耗,所以阀芯地部的油压Pa 可能与系统中的压力p不一样。阀芯上部受弹簧力作用,弹簧刚度为K弹,阀芯的下部有控制油压的作用力,承压面积为A,阀口处液流使阀芯受有液动力,其中稳态液动力的作用可以看成是弹簧的附加刚度K动,阀芯等运动件质量为m,在运动中有关心。有关变量和 量都注在图1-1中 直动溢流阀的结构简图 (二)在动态分析中所考虑的因素 在一个研究对象中,影响动态性能的因素是比较多的。在分析时,这些因素不可能都考虑,也没有必要都考虑,但是影响动态性能的主要因素必须考虑。有些因素对动态性能虽有影响,但影响不大,为了使分析研究简化起见,这些因素就可以忽略掉。 在本例中,考虑的因素有:阀芯等运动件的质量,弹簧的刚度,阻尼孔处的液阻,阀口处的流量特征以及阀口液流产生的稳态液动力等。同时对一些因素予以忽略。因一般阀口处的排油直接回油箱,且回油管道较短,所以排油管道中的液阻忽略不计,同时忽略了与排油腔相通的阀芯顶部容腔油液的作用。如果回油管较长,或排油管路中还有其他元件,则要考虑它们的影响。油液的可压缩性对动态性能是有影响的,但在本例中,如阀芯底部的容腔等,容积都很小,其中液体的可压缩性影响不大,所以可以忽略不计。溢流阀中液流通道很短,
比例溢流阀使用问题说明 至上海海斯模设备有限公司大连办事处: 您好,我司于2011年1月28日于贵公司购买了比例电磁溢流阀,合同编号是:HEBTY-L-110128HSM-X 现已到货的比例电磁溢流阀型号数量如下: AGMZO-TERS-PS-20/315/I 比例电磁溢流啊1件 AGMZO-TERS-PS-32/315/I 比例电磁溢流啊3件现在这批到货的阀已于2011年11月20日开始调试使用。在加载运行过程中贵公司的32通径比例电磁溢流阀出现如下问题:比例电磁溢流阀加载情况是从0~16MPa ,设备做长时间加载试验,但并不是始终在16MPa,属于分阶段反复加载试验,在设备运行了大概4个小时的时候,比例阀出现了加载到10MPa或者稍高一点就有(1~ 2)MPa的压力跳动。而且还伴随压力上不去的情况。然后我司更换了备用(同批次同等型号)的比例电磁溢流阀。同样是经过了大概相同的时间后出现了同样的情况。其间我现场工作人员也有对阀进行了简单的清洗,安装后也是出现了大概相同的情况。后来我司工作人员从其他设备拆卸下来已使用过的没有问题的比例溢流阀(2010年我司制造的XX-4设备,此溢流阀也是阿托斯的相同型号比例溢流阀,但是订货批次不同)更换上后,运行过程中一切正常。已经超过10个小时。 综上所述设备运行过程中出现的非正常压力跳动是由于比例溢流阀造成的,我们的设备现在正处于试验的紧要关头,并且很快要进 1
行为期300小时的不停机加载试验。所以恳请贵司尽快安排相关技术人员到我处把问题解决。况且我公司明年还有xx-15、xx-20即将投产。如果此事解决不好的话肯定对贵公司的信用造成非常不好的影响,同时也会影响到我司明年的订货问题。 哈尔滨一麟液压机械制造有限公司 2011.12.25
液压建模与系统仿真结课作业 直动式溢流阀的动态特性仿真 姓名郑文婧 学号132085206011 学院能源与动力工程 专业动力工程 2014年7月10日
直动式溢流阀的动态特性仿真 溢流阀一种压力控制阀,在液压设备中主要起定压溢流作用,稳压作用,系统卸荷作用和安全保护作用。定压溢流作用:在定量泵节流调节系统中,定量泵提供的是恒定流量,当系统压力增大时,会使流量需求减小,此时溢流阀开启,使多余流量溢回油箱,保证溢流阀进口压力,即泵出口压力恒定(阀口常随压力波动开启)。稳压作用:溢流阀串联在回油路上,溢流阀产生背压运动部件平稳性增加。系统卸荷作用:在溢流阀的遥控口串接溢小流量的电磁阀,当电磁铁通电时,溢流阀的遥控口通油箱,此时液压泵卸荷,溢流阀此时作为卸荷阀使用。安全保护作用:系统正常工作时,阀门关闭,只有负载超过规定的极限(系统压力超过调定压力)时开启溢流,进行过载保护,使系统压力不再增加(通常使溢流阀的调定压力比系统最高工作压力高10%~20%)。 1、基于Matlab 的直动式溢流阀的仿真 1.1、液压系统及动态过程 任何一个液压元件总是在某一定的液压系统中工作的。在绘制功率键合图,进行动态分析时,总是针对某一具体动态过程进行研究的。 本研究的直动式溢流阀调压系统的液压原理图如图1-1所示。在图中所示情况下,液压泵的供油经电磁阀流回油箱,当电磁阀突然通电关闭时,直动式溢流阀由原来的关闭状态到打开溢流,直到系统达到新的静平衡状态的瞬态响应过程。 图1.1-1 直动式溢流阀调压系统的液压原理图 在上图中,因重点研究的是溢流阀,因此对溢流阀本身的影响特性的因素考虑的多一点,其他不必要的可忽略不计。为了便于分析,需要画出直动式溢流阀的的结构简图,该结构简图及其与系统其他部分的关系如图1-2。 图1.1-2 所研究系统的结构简图
83 200/103 ED
MD1E
直动式比例方向阀
开环控制 MD1E 反馈控制 MD1ER 序列 51 序列 50
板式 CETOP 03 P max 350 bar Q max (见 技术参 数表 )
安装面尺寸
CETOP 4.2-4-03-350
ISO/CD 4401-03
工作原理
—
MD1E 阀是一种直动式比例方向阀,其油口尺寸和位置完 全符合 CETOP 和 ISO 标准。 该阀用于液压执行机构的运动方向和速度控制。 该阀的开度及流量可连续调节,并与输入到电磁铁的电流 成正比。 — 该阀可直接采用电流控制单元控制,也可采用 相配套的电子控制单元控制,以充分发挥它的 性能(见 10 节)。 — 该阀可采用开环控制方式,或者阀芯位移反馈的 闭环控制方式,以使系统具有最优的控制精度和 重复性。
— —
技术参数 (采用配套的电气控制单元,在油液粘度为 36 cSt,温度 为 50°C 下测得)
MD1E 最大工作压力: - P-A-B口 - T口 bar bar l/min MD1ER 350 140 2.5 - 4 - 8 - 16 - 24 见8节 % of Q max % of Q max < 6% < ±2% < 1% < ±0.5%
最大流量(P-T压差Δp =10 bar) 阶跃响应 滞环 重复性 电气性能 环境温度 油液温度范围 油液粘度范围 推荐油液粘度 油液清洁度 质量 MD1E - S* MD1E - TA/TC
液压符号 (典型)
见7节 °C °C cSt cSt –10~+50 –20~+80 10~ 400 25
NAS 1638 7 – 9 级 kg 1.6 1.2 1.9 –
83 200/103 ED
1/8
动画演示溢流阀的作用 080202232 曹宇08机电一体行政2班 摘要: ◆溢流阀的结构原理 ◆DBD型直动式溢流阀结构原理。 ◆动画演示。 ◆溢流阀的应用。 ◆用动画演示溢流阀。 关键词: ?液压系统, ?溢流阀 ●机电一体化。 1)结构原理 1)DBD型直动式溢流阀图1是DBD型直动式溢流阀的结构原理图。进油口的压力油通过阻尼活塞作用在其底部,形成了一个与弹簧力相抗衡的液压力。当此液压力小于调压弹簧的弹簧力时,锥阀关闭,此阀不起调压作用。随着进油口压力的不断提高。当液压力大于弹簧力时,锥阀开启,多余的油液溢回油箱,使进油口压力稳定在调定值上。 DBD型直动式溢流阀结构原理图 a)至40MPa阀的结构;b)至63MPa阀的结构 1—调节螺杆;2—阀体;3—调压弹簧;4—偏流盘;5—锥阀;6—阻尼活塞阻尼活塞的作用:一是在锥阀开启或闭合时起阻尼作用,用来提高阀的调压稳定性;二是对锥阀起导向作用,以提高阀的密封性能。 偏流盘的作用:偏流盘上开有环形槽,用以改变锥阀出油口的液流方向。于是偏流盘受到了一个液动力,此液动力与弹簧力的作用方向相反,并随溢流量的增加而加大。当溢流 量增加时,由于、阀锥开口增大,引起弹簧力增加。但由于液动力也同时增加,结构抵消了弹簧力的增量。因此这种阀的进口压力不受流量变化的影响,其p-Q
特性曲线比较理想,启闭特性好,有利于提高阀的额定流量。 (2)应用 1)起安全阀作用(防止液压系统过载)溢流阀起安全阀作用时,是为了限制液压系统的最高压力,以保证系统的安全。在系统正常工作情况下,阀关闭不溢流,系统的工作压力决定于外载荷。当系统压力达到阀的调定压力时,阀开启溢流,此时系统压力就决定于溢流阀的调定压力。 2)起溢流阀作用(维持液压系统压力恒定)在节流调速系统中,溢流阀在正常工作时为常开,通过溢流将多余油液排回油箱而维持液压系统压力基本恒定。 3)使液压系统卸荷先导式溢流阀的远程控制口通油箱,就可以利用溢流阀使系统卸荷。DBW型先导式电磁溢流阀利用本身的电磁换向阀就可实现系统卸荷,而其他的先导式溢流阀要实现系统卸荷,就要在远程控制口上添加换向阀。 4)远程调压在先导式溢流阀的远程控制口上接远程调压阀,能实现远程调压。 此外,溢流阀还可做背压阀使用,能使系统工作平稳;溢流阀与换向阀配合,可实现系统的多级压力控制;在制动回路中,用溢流阀可实现制动作用;在液压试验台系统中,溢流阀可用作加载阀等。
溢流阀原理及故障处理 主编:龙游
目录 一、DB/DBW型先导溢流阀 (1) 二、DR型先导式减压阀…………………………………………………… 三、DZ型先导顺序阀……………………………………………………… 四、DA/DAW型先导控制式卸荷阀………………………………………… 五、压力继电器……………………………………………………………… 六、压力表开关……………………………………………………………… 七、单向阀、液控单向阀…………………………………………………… 八、电磁换向阀和电液换向阀……………………………………………… 九、Z2FS型叠加式单向节流阀……………………………………………… 十、行程节流阀……………………………………………………………… 十一、2FRM型调速阀………………………………………………………… 十二、分流—集流阀………………………………………………………………
一、DB/DBW 型先导溢流阀 1.结构和工作原理 DB 型阀是先导控制式的溢流阀;DBW 型阀是先导控制式的电磁溢阀。DB 型阀是用来控制液压系统的压力;DBW 型阀也可以控制液压系统的压力,并且能在任意时刻使系统卸荷。 DB 型阀主要是由先导阀和主阀组成。DBW 型阀是由电磁换向阀、先导阀和主阀组成。 DB 型溢流阀: A 腔的压力油作用在主阀芯(1)下端的同时,通过阻尼器(2)、(3)和通道(12)、(4)、(5)作用在主阀芯上端和先导阀(7)的锥阀(6)上。当系统压力超过弹簧(8)的调定值时,锥阀(6)被打开。同时主阀芯上端的压力油通过阻尼器(3)、通道(5)、弹簧腔(9)及通道(10)流回B 腔(控制油内排型)或通过外排口(11) 流回油箱(控制油外排型)。这样,当压力油通过阻尼器(2)、(3)时在主阀芯(1)上产生了一个压力差,主阀芯在这个压差的作用下打开,这样在调定的工作压力下压力油从A 腔流到B 腔(即卸荷)。 DBW 型电磁溢流阀: 此阀工作原理与DB 型阀相同,只是可通过安装在先导阀上的电磁换向阀 (14)使系统在任意时刻卸荷。 DB/DBW 型阀均设有控制油内部供油道(12)、(4)和内部排油道(10);控制油外供口X 和外排口Y 。这样就可根据控制油供给和排出的不同形式的组合内供内排、外供内排、内供外排和外供外排4种型式。 2.溢流阀常见故障及排除 溢流阀在使用中,常见的故障有噪声、振动、阀芯径向卡紧和调压失灵等。 (一)噪声和振动 液压装置中容易产生噪声的元件一般认为是泵和阀,阀中又以溢流阀和电磁换向阀等为主。产生噪声的因素很多。溢流阀的噪声有流速声和机械声二种。流速声中主要由油液振动、空穴以及液压冲击等原因产生的噪声。机械声中主要由阀中零件的撞击和磨擦等原因产生的噪声。 (1)压力不均匀引起的噪声 先导型溢流阀的导阀部分是一个易振部位如图3所示。在高压情况下溢流时,导阀的轴向开口很小,仅0.003~0.006厘米。过流面积很小,流速很高,可达200米/秒,易引起压力分布不均匀,使锥阀径向力不平衡而产生振动。另外锥阀和锥阀座加工时产生的椭圆度、导阀口的脏物粘住及调压弹簧变形等,也会引起锥阀的振动。所以一般认为导阀是发生噪声的振源部位。 由于有弹性元件(弹簧)和运动质量(锥阀)的存在,构成了一个产生振荡的条件,而导阀前腔又起了一个共振腔的作用,所以锥阀发生振动后易引起整个阀的共振而发出噪声,发生噪声时一般多伴随有剧烈的压力跳动。 (2)空穴产生的噪声 图1 DB 型溢流阀
溢流阀知识大全 一、DB/DBW型先导溢流阀 1.结构和工作原理 DB型阀是先导控制式的溢流阀;DBW型阀是先导控制式的电磁溢阀。DB 型阀是用来控制液压系统的压力;DBW型阀也可以控制液压系统的压力,并且能在任意时刻使系统卸荷。 DB型阀主要是由先导阀和主阀组成。DBW型阀是由电磁换向阀、先导阀和主阀组成。 DB型溢流阀: A腔的压力油作用在主阀芯(1)下端的同时,通过阻尼器(2)、(3)和通道(12)、(4)、(5)作用在主阀芯上端和先导阀(7)的锥阀(6)上。当系统压力超过弹簧(8)的调定值时,锥阀(6)被打开。同时主阀芯上端的压力油通过阻尼器(3)、通道(5)、弹簧腔(9)及通道(10)流回B腔(控制油内排型)或通过外排口(11)流回油箱(控制油外排型)。这样,当压力油通过阻尼器(2)、(3)时在主阀芯(1)上产生了一个压力差,主阀芯在这个压差的作用下打开,这样在调定的工作压力下压力油从A腔流到B腔(即卸荷)。 DBW型电磁溢流阀: 此阀工作原理与DB型阀相同,只是可通过安装在先导阀上的电磁换向阀(14)使系统在任意时刻卸荷。 DB/DBW型阀均设有控制油内部供油道(12)、(4)和内部排油道(10);控制油外供口X和外排口Y。这样就可根据控制油供给和排出的不同形式的组合内供内排、外供内排、内供外排和外供外排4种型式。 2.溢流阀常见故障及排除 溢流阀在使用中,常见的故障有噪声、振动、阀芯径向卡紧和调压失灵等。 (一)噪声和振动 液压装置中容易产生噪声的元件一般认为是泵和阀,阀中又以溢流阀和电磁换向阀等为主。产生噪声的因素很多。溢流阀的噪声有流速声和机械声二种。流速声中主要由油液振动、空穴以及液压冲击等原因产生的噪声。机械声中主要由阀中零件的撞击和磨擦等原因产生的噪声。 (1)压力不均匀引起的噪声 先导型溢流阀的导阀部分是一个易振部位如图3所示。在高压情况下溢流时,导阀的轴向开口很小,仅0.003~0.006厘米。过流面积很小,流速很高,可达200米/秒,易引起压力分布不均匀,使锥阀径向力不平衡而产生振动。另外锥阀和锥阀座加工时产生的椭圆度、导阀口的脏物粘住及调压弹簧变形等,也会引起锥阀的振动。所以一般认为导阀是发生噪声的振源部位。 由于有弹性元件(弹簧)和运动质量(锥阀)的存在,构成了一个产生振荡的条件,而导阀前腔又起了一个共振腔的作用,所以锥阀发生振动后易引起整个阀的共振而发出噪声,发生噪声时一般多伴随有剧烈的压力跳动。(2)空穴产生的噪声 当由于各种原因,空气被吸入油液中,或者在油液压力低于大气压时,溶解在油液中的部分空气就会析出形成
溢流阀的基本结构及其工作原理在液压传动系统中,控制油液压力高低的液压阀称之为压力控制阀,简称压力阀。这类阀的共同点是利用作用在阀芯上的液压力和弹簧力相平衡的原理工作的。 一、溢流阀的基本结构及其工作原理 溢流阀的主要作用是对液压系统定压或进行安全保护。 (一)溢流阀的作用和性能要求 1.溢流阀的作用 在液压系统中用来维持定压是溢流阀的主要用途。它常用于节流调速系统中,和流量控制阀配合使用,调节进入系统的流量,并保持系统的压力基本恒定。用于过载保护的溢流阀一般称为安全阀。 2.液压系统对溢流阀的性能要求 (1)定压精度高 (2)灵敏度要高 (3)工作要平稳且无振动和噪声
(4)当阀关闭时密封要好,泄漏要小。 (二)溢流阀的结构和工作原理 常用的溢流阀按其结构形式和基本动作方式可归结为直动式和先导式两种。 1.直动式溢流阀 直动式溢流阀是依靠系统中的压力油直接作用在阀芯上与弹簧力等相平衡,以控制阀芯的启闭动作,溢流阀是利用被控压力作为信号来改变弹簧的压缩量,从而改变阀口的通流面积和系统的溢流量来达到定压目的的。当系统压力升高时,阀芯上升,阀口通流面积增加,溢流量增大,进而使系统压力下降。溢流阀内部通过阀芯的平衡和运动构成的这种负反馈作用是其定压作用的基本原理,也是所有定压阀的基本工作原理。
? 2.先导式溢流阀 图-19所示为先导式溢流阀的结构示意图,由于先导阀芯一般为锥阀,受压面积较小,所以用一个刚度不太大的弹簧即可调整较高的开启压力,用螺钉调节导阀弹簧的预紧力,就可调节溢流阀的溢流阀压力。 先导式溢流阀有一个远程控制口K,如果将K口用油管接到另一个远程调压阀(远程调压阀的结构和溢流阀的先导控制部分一样),调节远程调压阀的弹簧力,即可调节溢流阀主阀芯上端的液压力,从而对溢流阀的溢流压力实现远程调压。但是,远程调压阀所能调节的最高压力不得超过溢流阀本身导阀的调整压力。当远程控制口K通过二位二通阀接通油箱时,主阀芯上端的压力接近于零,主阀芯上移到最高位置.阀口开得很大。由于主阀弹簧较软,这时溢流阀p口处压力很低,系统的油在低压下通过溢流阀流回油箱,实现卸荷。 (三)溢流阀的性能 溢流阀的性能包括溢流阀的静态性能和动态性能。 1.静态性能
目录 摘要 (1) 一、前言 (1) 二、比例阀测试、调试技术的背景介绍 (1) 三、比例阀测试、调试系统介绍 (2) 四、比例方向阀试验 (3) 五、结束语 (5) 致谢 (5) 参考文献 (6)
先进的液压比例阀测试、调试方法 【摘要】文章首先对REXROTH公司最新技术生产的液压综合试验台中最具代表意义的液压比例阀的测试方法进行了综合介绍,然后以自编的比例方向阀试验程序为实例对DASYLAB软件的编程方式进行了说明。最后附以比例阀试验的试验结果。 【关键词】液压比例阀;计算机辅助测试 一、前言 上海大众工厂服务科由于液压设备维修的需要,经过一年多时间的规划,于1998年10月从德国引进了1台液压元件综合试验台(Universal Test Rig)。这台试验台由德国REXROTH公司生产。它具有对比例阀、比例泵等液压比例元件进行调试、测试等功能。 试验台比例阀试验的最大技术特点在于:对于每一项比例阀试验,虽然系统没有提供现成的试验程序,但用户可以方便地用DASYLAB软件,根据自己的试验要求设计试验程序。因此,试验台功能可以得到最大限度的发挥。 二、比例阀测试、调试技术的背景介绍 在液压元件试验技术中,比例阀的试验难度较大,试验手段发展也较快。 在常规元件的试验中,试验工况的变化一般是通过手调实现,工况点是有限的、离散的。试验结果的记录也是通过读表手抄到试验表格中的。 比例阀的试验与常规元件试验不同,它的工况的变化是连续的,试验结果也是连续的,一般通过特性曲线反映试验结果。 常规的比例阀调试、测试过程如下:用信号发生器根据试验要求产生斜波、三角波等控制信号并将其接入比例阀,比例阀发生工况移动。受控的压力、流量等工况参量通过相应传感器记录到X-Y记录仪上。这样就可以得到受控参量(压力,流量等)与控制信号(电流等)之间的反映比例阀性能的特性曲线。 20世纪80年代后期随着计算机技术的发展,比例阀计算机辅助调试、测试系统开始出现,如由北京理工大学用C++语言开发的宝钢综合液压试验台比例阀测试系统和浙江大学用Turbo C语言开发的杭州液压件厂比例阀测试系统。在这些系统中,都采用“微机+AD/DA采集卡”及相应传感、变换电路组成信号发生和采集的硬件系统,结合编制的
直动式比例溢流阀 直动式比例溢流阀的工作原理及结构见图3-2,。这是一种带位置电反馈的双弹簧结构的直动式溢流阀。它于手调式直动溢流阀的功能完全一样。其主要区别是用比例电磁铁取代了手动弹簧力调节组件。 如图3-2a所示,它主要包括阀体6,带位置传感器1、比例电磁铁2、阀座7、阀芯5及调压弹簧4等主要零件。当电信号输入时,电磁铁产生相应的电磁力,通过弹簧座3加在调压弹簧4和阀芯上,并对弹簧预压缩。此预压缩量决定了溢流压力。而压缩量正比输入电信号,所以溢流压力也正比于输入电信号,实现对压力的比例控制。 弹簧座德实际位置由差动变压器式位移传感器1检测,实际值被反馈到输入端与输入值进行比较,当出现误差就由电控制器产生信号加以纠正。由图3-2b所示的结构框图可见,利用这种原理,可排除电磁铁摩擦的影响,从而较少迟滞和提高重复精度等因素会影响调压精度。显然这是一种属于间接检测的反馈方式。 a
b 图3-2 带位置电反馈的直动式溢流阀 a)工作原理及结构b)结构框图 1—位移传感器2—比例电磁铁3—弹簧座4—调压弹簧 5—阀芯6—阀体7—阀座8—调零螺钉 普通溢流阀可以靠不同刚度的调压弹簧来改变压力等级,而比例溢流阀却不能。由于比例电磁铁的推力是一定的,所以不同的等级要靠改变阀座的孔径来获得。这就使得不同压力等级时,其允许的最大溢流量也不相同。根据压力等级不同,最大过流量为2~10L/min。阀的最大设定压力就是阀的额定工作压力,而设定最低压力与溢流量有关。这种直动式的溢流阀除在小流量场合下单独作用,作为调节元件外,更多的是作为先导式溢流阀或减压阀的先导阀用。另外,位于阀底部德调节螺钉8,可在一定范围内,调节溢流阀的工作零位。先导式比例溢流阀 1.结构及工作原理 图3-3所示为一种先导式比例溢流阀的结构图。它的上部位先导级6,是一个直动式比例溢流阀。下部为主阀级11,中部带有一个手调限压阀10,用于防止系统过载。 当比例电磁铁9通有输入信号电流时,它施加一个直接作用在先导阀芯8上。先导压力油从内部先导油口(取下螺堵13)或从外部先导油口X处进入,经流道口和节流3后分成两股,一股经节流孔5
全数字双闭环 比例换向阀控制器 使用说明书 外部 4-2OmA 双闭环控制原理 双闭环控制
概述 电路采用32bit高速CPU设计,具有结构简单可靠,参数长时间不会漂移,看门狗设计。具有模拟量和数字量外部接口设计。一块控制板可以方便控制比例换向阀,大大简化了常规设计。 二、功能特点 1、集成双闭环设计,比例换向阀阀芯位置闭环控制外部给定反馈闭环控制 2、放大器和控制器合二为一,精简设备,减少维护量降低故障率 3、具有使用模拟量接口4-20mA (或者0-20mA)反馈、4-20mA (或者0-20mA)(给定与 主电路隔离) 4、具有数字量接口设计,MODEBUSRS485RTU CANBUS接口 5、可以多个设备进行组网控制,适合多点集中控制 6、外部给定反馈闭环控制PID参数调节通过3个电位器调整 7、两路阀芯电磁铁控制具有输出过流保护 8、看门狗设计,能够及时复位异常工况 三、参数 1、供电:DC15~30VDC @ 2A 2、尺寸123(mm)X160(mm) 3、调节精度土1% 4、适用范围:华德比例换向阀6通径或10通径带阀芯位置反馈装置进行液压缸、液压缸伸 缩位置定位控制,马达行走机构定位控制,液压升降机构定位控制,液压紧紧力装置控 制、液压马达行走速度控制等 5、工作温度:-30~60摄氏度 6、湿度: 7、震动: 四、典型应用 外部 眾闭环拎制療理 执行机构可以是液压缸,液压马达等执行部件,可以对控制对象进行精准控制
五、接线说明
4-20JIL\反说4: - £ thn^, 3裁 U OT fe O- WvJfcJ,^ 平 e VI处口 住I五li;E:口:口? 昭Q in 国叫器 4-SOtaA V 1 =■ ‘1 「念—■ C-J5-J 桂到岀例換 向周帅冠传 接到比洌抉 向雋电宦线 團1 播到比 号轶 尙陶电磁红 團2 接理制板OUTi 不区 分正优两倾线任意 按
【溢流阀的工作原理及分析】 直动型溢流阀 直动式溢流阀的结构原理图及图形符号,它由阀芯(滑阀)及调压机构(调压螺钉和调压弹簧)等主要部分组成。阀体左、右两端开有溢流的进口P(按液压泵或被控液压油路)和出油口T(接油箱),阀体中开有阻尼孔和泄油孔。这种阀是利用进油口的液压力直接与弹簧力相平衡来进行压力控制的。液压油从油口P进入阀体孔内的同时,经阻尼孔进入阀芯底部,当作用于阀芯的向上的液压作用力较小时,阀芯在弹簧力的作用下处于下端位置,油口P与T不相通。当油压升高至使阀芯底部端向上的液压力大于弹簧预调力时,阀芯上升,直到阀口开启,油口P与T相通,液压油液经出油口T溢流回油箱,使油口P的压力稳定在溢流阀的调定值。通过调压螺钉5、调压弹簧7的预调力,即可调整溢流压力。经阀芯与阀体孔径向间隙泄漏弹簧腔的油液,直接通过油孔8与溢流阀进口压力,高压时所需调节力及弹簧尺寸较大,故多用于低压系统场合。
先导型溢流阀 先导型溢流阀的结构原理及图形符号,它由先导阀(导阀芯7及调压弹簧8)和主阀(主阀芯2及复位弹簧4)两大部分构成,先导阀负责调压,主阀负责溢流。阀体1上开有进油口P、出油口T 和一个远程控制口K,主阀内设有阻尼孔3和泄油孔12,主阀与先导阀间设有阻尼孔5。这种阀的主阀启、闭受控于先导阀,即利用主阀芯上、下两端的压力差与弹簧相平衡进行压力控制。液压油从进油口P进入,通过阻尼孔3后作用在先导阀上,并经阻尼孔5流入主阀芯上端,同时进入主阀芯底端。当进油口的压力较低,先导阀上的液压作用力不足以克服调压弹簧8的作用力时,先导阀关闭,没有油液流过阻尼孔3,所以主阀芯上、下两端的压力相等,在复位弹簧4的作用下,主阀芯2上在最下端位置,溢流阀进油口P和回油口T不通,没有溢流。当进油口压力长高到先导阀上的液压力大于调压弹簧8的预调力时,先导阀打开,液压油即通过阻尼孔3,经先导阀和泄油孔12流回油箱。由于阻尼孔3的作用,使主阀芯上端的压力小于下端,
电液比例溢流阀的原理及设计 今天为大家介绍一项国家发明授权专利——一种电液比例溢流阀。该专利由浙江工业大学申请,并于2016年11月30日获得授权公告。 内容说明本发明属于流体传动及控制领域中的液压控制元件,具体涉及一种电液比例溢流阀。 发明背景在液压系统中,溢流阀起到了非常重要的作用,溢流阀性能的好坏直接影响整个液压系统的控制性能,进而影响到高端制造设备的整体质量和技术水平。现在电液比例溢流阀广泛应用于许多重要的工程领域,如大型数控设备、工程机械等;导弹、卫星、舰船等军工、航天领域;汽车、行走机械等领域,在国民经济发展中占有相当重要的地位。 溢流阀按照控制方式可以分为手调式溢流阀和电液比例溢流阀。在航空、航天、武器装备、钢铁、电站等重要的工业领域得到大力发展的今天,普通的液压传动系统就需要更多的结合电子技术,像伺服控制系统那样在动力传输与转换过程中实现连续自动控制,以满足工业技术的发展,电液比例溢流阀就在这种背景下产生。电液比例溢流阀是在手调溢流阀的基础上增加电磁铁,利用电磁力来推动阀芯运动,电液比例溢流阀进口压力的高低与输入信号电流的大小成正比,即进口油压受输入电磁铁的电流大小控制。若输入信号电流是连续地按比例或按一定程序变化,则比例溢流阀所调节的液压系统压力也连续地按比例或按一定程序进行变化。随着液压技术的发展,电液比例溢流阀的发展趋势开始向小型化大流量方向发展,并提出了低功耗的要求,但目前国内外厂家的主流溢流阀还没有实现这一要求。 现有的直动式电液比例溢流阀采用比例电磁铁输出推力直接驱动阀芯运动,结构简单,但由于受比例电磁铁输出推力的限制,无法从根本上解决高压、大流量下液动力的影响问题,在高压(压差大)和大流量的工作状态下仍然会出现流量饱和现象;要从根本上消除液动力影响、提高液压阀的过流能力,最根本的办法是采用导控(先导控制)技术,其基本思想是采用一通径较小的导阀控制主阀敏感腔的压力变化,驱动主阀芯运动,因液压推力比油液流经阀口时所产生液动力大得多,足以消除其对主阀芯运动与控制产生的不利影响。
全数字双闭环比例换向阀控制器使用说明书 双闭环控制
一、概述 电路采用32bit高速CPU设计,具有结构简单可靠,参数长时间不会漂移,看门狗设计。具有模拟量和数字量外部接口设计。一块控制板可以方便控制比例换向阀,大大简化了常规设计。 二、功能特点 1、集成双闭环设计,比例换向阀阀芯位置闭环控制\外部给定反馈闭环控制 2、放大器和控制器合二为一,精简设备,减少维护量降低故障率 3、具有使用模拟量接口4-20mA(或者0-20mA)反馈、4-20mA(或者0-20mA)(给定 与主电路隔离) 4、具有数字量接口设计,MODEBUSRS485RTU、CANBUS接口 5、可以多个设备进行组网控制,适合多点集中控制 6、外部给定反馈闭环控制PID参数调节通过3个电位器调整 7、两路阀芯电磁铁控制具有输出过流保护 8、看门狗设计,能够及时复位异常工况 三、参数 1、供电:DC15~30VDC @ 2A 2、尺寸123(mm)X160(mm) 3、调节精度±1% 4、适用范围:华德比例换向阀6通径或10通径带阀芯位置反馈装置进行液压缸、液 压缸伸缩位置定位控制,马达行走机构定位控制,液压升降机构定位控制,液压紧紧力装置控制、液压马达行走速度控制等 5、工作温度:-30~60摄氏度 6、湿度: 7、震动: 四、典型应用 执行机构可以是液压缸,液压马达等执行部件,可以对控制对象进行精准控制 五、接线说明
六、调整方法 此步骤为出厂已经调试好,一般用户无需调整,如果参数确实差异很大,请谨慎操作 1、按照接线方法接好线,并认真检查正确后,将控制板上的保险丝去掉,控制板上电后, 用万用表的交流档测量COM与L 和COM与R的电压应相同大约在2.3VAC,如果差异大(>0.1VAC)就需要松开位置传感器上的螺丝,将位置传感器的位置通过两个限位螺丝移动,直到测量COM与L 和COM与R的电压应相同为止。这个步骤一般用户只做检查即可,已经出厂调整过。如果确实差异很大就必须进行调整。 2、第1步做好后,将保险丝恢复,上电后测量下面图中的位置,按照图中的说明进行调整 操作。
比例调节阀工作原理 一、各个部件介绍:1 反馈杆1、1 连接销钉1、2 连接卡子2、1 喷嘴, 正作用(> >)2、2 喷嘴, 反作用(< >)3 膜片连杆(档板)4 测量弹簧5测量比较膜片6、1 量程调整螺钉6、2 零调整螺丝7 正反作用调整器8 比例/增益Xp9气源压力调整针阀10 气动放大器11 输出气量调整Q12电磁阀(可选件) 13 I/P转换器 二、工作原理:输入控制电流信号的变化被I/P转换器按比例转换为气动控制信号Pe送给气动单元,作为控制给定值,来调整阀杆的行程。气动控制信号pe在测量比较膜片(5)上的作用力与范围弹簧(4)的力(阀位反馈力)相比较。如果输入控制信号引起气动控制信号pe变化或阀位引起反馈杆(1)变化,膜片连杆使杠杆/挡板(3)与喷嘴(2、1或2、2)的间隙发生变化,产生与偏差相对应的喷嘴背压。可调整气路转换块(7)决定哪个喷嘴工作即决定阀门定位器正反作用。气源供给气动放大器(10)和气源压力调整针阀(9),调整后的气源经比例/增益调整Xp(8)和气路转换块(7)到喷嘴(2、1 或2、2),控制信号或阀位反馈杆(1)变化引起挡板与喷嘴间隙变化,使喷嘴背压变化并传到气动放大器(10),经放大产生输出信号压力Pst,再经输出气量调整(11)传送到气动执行器,使阀位定位在控制信号要求值。对于直行程控制阀,阀行程是由连接销钉(1、1)传
递给反馈杆(1)的;对于角行程控制阀,是在反馈杆上加一个随动轮,并随安装在执行器传动轴上的凸轮的转动而位移。最终,反馈杆的线性运动被转换为范围弹簧(4)的作用力。若用于双作用执行器,阀门定位器则再装一个反向输出气动放大器,将输出两个相反的输出信号压力(Pst1和Pst2)。可调比例/增益Xp (8)和输出气量调整针阀Q(11)用来优化定位控制。两个调整螺钉(6、1和6、2)用来调整零点和量程。作用方向当气动控制信号(Pe)增加,输出信号压力(Pst)可选择为增加-增加(正作用>>)或增加-减小(反作用<>)。作用方向由气路转换块(7)的位置决定,并有相应标记。可在现场调整改变作用方向。
比例调节阀控制器工作原理 一、各个部件介绍: 1 反馈杆 1.1 连接销钉 1. 2 连接卡子2.1 喷嘴, 正作用(> >)2.2 喷嘴, 反作用(< >) 3 膜片连杆(档板) 4 测量弹簧5测量比较膜片 6.1 量程调整螺钉 6.2 零调整螺丝7 正反作用调整器8 比例/增益Xp 9气源压力调整针阀10 气动放大器11 输出气量调整Q 12电磁阀(可选件) 13 I/P转换器
二、工作原理: 输入控制电流信号的变化被I/P转换器按比例转换为气动控制信号Pe送给气动单元,作为控制给定值,来调整阀杆的行程。 气动控制信号pe在测量比较膜片(5)上的作用力与范围弹簧(4)的力(阀位反馈力)相比较。如果输入控制信号引起气动控制信号pe变化或阀位引起反馈杆(1)变化,膜片连杆使杠杆/挡板(3)与喷嘴(2.1或2.2)的间隙发生变化,产生与偏差相对应的喷嘴背压。可调整气路转换块(7)决定哪个喷嘴工作即决定阀门定位器正反作用。 气源供给气动放大器(10)和气源压力调整针阀(9),调整后的气源经比例/增益调整Xp(8)和气路转换块(7)到喷嘴(2.1 或2.2),控制信号或阀位反馈杆(1)变化引起挡板与喷嘴间隙变化,使喷嘴背压变化并传到气动放大器(10),经放大产生输出信号压力Pst,再经输出气量调整(11)传送到气动执行器,使阀位定位在控制信号要求值。 对于直行程控制阀,阀行程是由连接销钉(1.1)传递给反馈杆(1)的;对于角行程控制阀,是在反馈杆上加一个随动轮,并随安装在执行器传动轴上的凸轮的转动而位移。最终,反馈杆的线性运动被转换为范围弹簧(4)的作用力。 若用于双作用执行器,阀门定位器则再装一个反向输出气动放大器,将输出两个相反的输出信号压力(Pst1和Pst2)。可调比例/增益Xp(8)和输出气量调整针阀Q (11)用来优化定位控制。两个调整螺钉(6.1和6.2)用来调整零点和量程。 作用方向 当气动控制信号(Pe)增加,输出信号压力(Pst)可选择为增加-增加(正作用>>)或增加-减小(反作用<>)。作用方向由气路转换块(7)的位置决定,并有相应标记。可在现场调整改变作用方向。
计算机仿真 直动式溢流阀仿真实验 班级:机设13-4班 学号: 2013210360 姓名:杨尚武 授课教师:翟华 日期: 2016年4月13日
一、实验目的 本实验要求学生能掌握连续系统仿真的一般过程,状态变量法的一般过程,键合图法仿真的一般过程,以四阶定步长龙格——库塔法的计算机程序的编写。二、实验要求 本实验要求学生能掌握连续系统仿真的一般过程,状态变量法的一般过程,键合图法仿真的一般过程,以及四阶定步长龙格—库塔法的计算机程序的编号要求每个学生参考上述源程序,独立编写C语言源程序或其他高级语言程序,正确计算仿真结果,并绘制压力P(t)和时间t的关系图,以及阀芯位移x(t)和时间t的关系。 三、参考C语言程序 #include "stdio.h" #include "math.h" void main() {FILE * fp; int i,j,e,g,l,s,n1,n2,b[3][2]; float d1,r1,r2,i1,c1,c2,x1,h1,a1,c,p0,pp,q1,x2,t; float a[3][3],y[3],u[2],k[3][5],h[5],p[3][5],z[3],d[3][5]; if((fp=fopen("fz1","wb"))==NULL) {printf("cannot open file\n"); } fprintf(fp,"digital simulation of hydraulic relief valve\n"); d1=0.012; r1=0.39e+11; r2=0.147e+12; i1=0.0614; c1=0.8e-12; c2=0.2e-4; x1=0.0014; p0=0.6e+6; pp=0.3e+7; q1=0.46e-3; h1=0.0003; t=0.0; n1=5; n2=55; a1=0.785*d1*d1;
超高压直动式比例溢流阀设计 在液压传动系统中,液流的压力是最基本的参数之一,执行元件的输出力或输出扭矩的大小,主要由供给的液压力所决定。为了对油液压力进行控制,并实现和提高系统的稳压、保压、减压、调压等性能或利用压力变化实现执行机构的顺序动作等,根据油液压力和控制机构弹簧力相平衡的工作原理,人们设计制造了各种压力控制阀。在液压设备中主要起定压溢流作用和安全保護作用。 标签:电液比例溢流阀工作原理结构设计 1 绪论 液压技术作为一门新兴应用学科,虽然历史较短,发展的速度却非常惊人。液压设备能传递很大的力或力矩,单位功率重量轻,结构尺寸小,在同等功率下,其重量的尺寸仅为直流电机的10%-20%左右;反应速度快、准、稳;又能在大范围内方便地实现无级变速;易实现功率放大;易进行过载保护;能自动润滑,寿命长,制造成本较低。液压阀的功用是控制液压传动系统的油流方向、压力和流量;实现执行元件的设计动作以控制、实施整个液压系统及设备的全部工作功能。 2 比例溢流阀的结构设计 溢流阀的基本功用是:当系统的压力达到或超过溢流阀的调定压力时,系统的油液通过阀口溢出一些,以维持系统压力近于恒定,防止系统压力过载,保障泵、阀和系统的安全,此时的溢流阀常称为安全阀或限压阀。①工作原理:设弹簧预紧力为Ft,活塞底部面积为A则:当PAFt时,阀口打开,P→T,稳压溢流或安全保护。②调压原理:调节比例电磁铁的输出力,便可调节溢流阀调整压力。③特点:可知这种阀的进口压力P不受流量变化的影响,被力P变化很小,定压精度高。但由于Ft直接与PA平衡,若P较高,Q较大时,电磁力就相应地较大,且Ft略有变化,p变化较大,所以一般用于低压小流量场合。 3 溢流阀主要参数设计 溢流阀工作时,随着溢流量的变化,系统压力会产生一些波动,不同的溢流阀其波动程度不同。因此一般用溢流阀稳定工作时的压力-流量特性来描述溢流阀的动、静态特性。 3.1 比例溢流阀的主要性能指标。溢流阀在不同的场合,可以有不同的用途,而比例溢流阀具有比普通溢流阀更强大的功能,这些功能包括:①构成液压系统的恒压源。比例溢流阀作为定压元件,当控制信号一定时,可获得稳定的系统压力;改变控制信号,可无级调节系统压力,且压力变化过程平稳,对系统的冲击小。②与计算机控制系统组合后很容易实现自动控制和远程控制。③比例溢流阀可方便地构成压力反馈系统,或与其他控制元件构成复合控制系统。④合理调节
浅谈比例溢流阀在磨煤机系统中应用 邢泾田 (大唐户县第二热电厂陕西省户县余下镇 710302) 摘要 本文大唐户县第二热电厂磨煤机加载油进行了介绍,分析了atos比例溢流阀结构及存在的故障,并针对故障情况提出了解决方法及调试过程。撰写本文的目的在于通过分析故障情况及原因,制订检修方法,提高磨煤机运行的可靠性、安全性,对同类设备的检修调试提出建议及借鉴。 【关键词】比例溢流阀磨煤机加载 1引言 大唐户县第二热电厂厂2×300MW机组锅炉由哈尔滨锅炉厂有限责任公司制造。 型号为:HG1025/17.5YM。磨煤机为北京电力设备总厂生产的ZGM95K型中速辊盘式磨煤机。其液压加载系统由高压油泵站、油管路、液动换向阀、加载油缸、蓄能器等部件组成。其变加载模式是由相应给煤量的4~20mA 电流信号,控制比例溢流阀压力大小,变更蓄能器和油缸的油压,从而实现加载力的变化。可以说液压加载系统是ZGM95K磨煤机具有相当技术含量和关键作用的设备组件,其安全运行意义重大。 我厂2台机组自2005年12月底投产后,因为受油质、比例溢流阀等因素影响;1 、2 号锅炉共10台磨煤机的液压加载油系统不同程度的出现加载压力不稳,严重影响磨煤机得出力,甚至要停磨检修,严重影响着锅炉运行的安全性和经济性。我厂高度重视,积极组织相关技术人员调查分析研究。 2故障分析 通过对我厂10台ZGM95K型中速辊式磨煤机液压加载油系统的分析,并结合相关的磨煤机油系统的技术资料。对影响磨煤机加载油压的因素进行了分类,认为影响磨煤机加载油压的故障点有以下几个方面,并且对各类原因进行具体分析讨论。 (1)变加载无压力,但切换到定加载后压力显示正常 (2)定加载的情况下压力也不正常(变小或者无压力) (3)加载油出现污染,带有杂质 (4)DCS传输信号以及控制电缆出现问题. 1.1变加载无压力,但切换到定加载后压力显示正常 对于我厂10台磨煤机的油站分析中看出磨煤机液压加载系统中最重要设备就是比例溢流阀,磨煤机变加载运行时:手动换向阀在左位,电磁换向阀在左位,油泵从油箱中吸油,油液经滤油器,单向阀,手