
Real AXiS QFXA W^nPaay
-
8 -2
基于MATLAB 的根轨迹分析
一. 实验目的:
1. 学习利用MATLAB 的语言绘制控制系统根轨迹的方法。
2. 学习利用根轨迹分析系统的稳定性及动态特性。
二. 实验内容:
1. 应用MATLAB 语句画出控制系统的根轨迹。
2. 求出系统稳定时,增益k 的范围。
3. 分析系统开环零点和极点对系统稳定性的影响。
三. 实验步骤
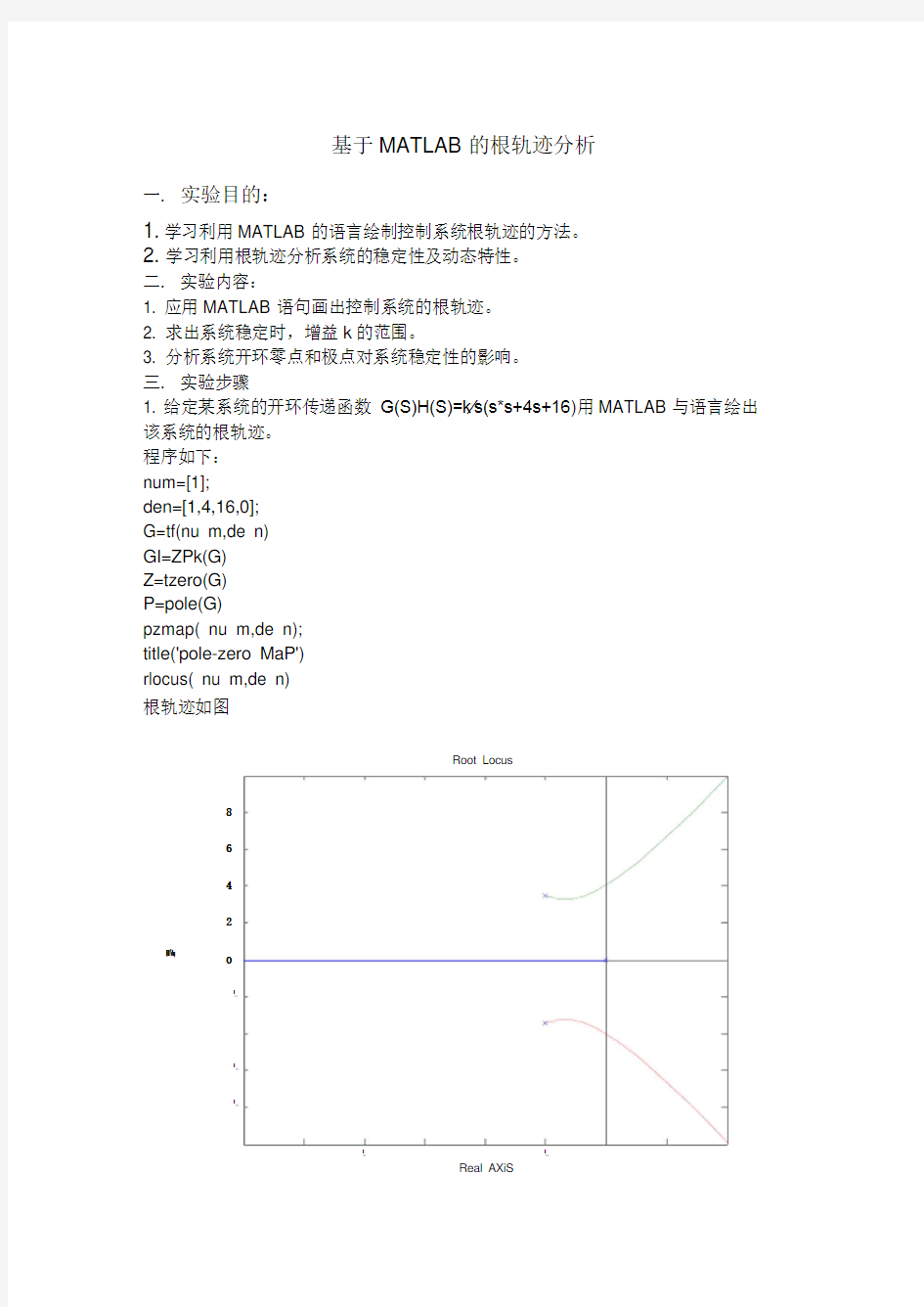
1. 给定某系统的开环传递函数 G(S)H(S)=k∕s(s*s+4s+16)用MATLAB 与语言绘出 该系统的根轨迹。
程序如下:
num=[1];
den=[1,4,16,0];
G=tf(nu m,de n)
GI=ZPk(G)
Z=tzero(G)
P=pole(G)
pzmap( nu m,de n);
title('pole-zero MaP')
rlocus( nu m,de n)
根轨迹如图
Root Locus
8
6
4
O
-
6
-
8
2
-
2
结论:由上图可知增益k的取值范围:0 2. 将系统的开环传递函数改为:G(S)H(S)=k∕s(s*s+4s+5)绘出该系统根轨迹图,观察增加了开环零点后根轨迹图的变化情况。 程序如下: num=[1,1]; den=[1,4,5,0]; G=tf(nu m,de n) GI=ZPk(G) Z=tzero(G) P=pole(G) pzmap( nu m,de n); title('pole-zero MaP') rlocus( nu m,de n) 根轨迹如图 结论:增加了开环零点后根轨迹的变化 -2.5-2 -1.5 -1 Real AXiS -0.5 0 Root Locus 4 3 2 O CFXA VyanLya P I I I I I I I I 3. 将系统的开环传递函数改为:G(S)H(S)=k∕s(s-1)(s*s+4s+5)绘出该系统的根轨迹图,观察增加了开环零点后根轨迹的变化情况。 程序如下: num=[1]; den=[1,3,5,-5,0]; G=tf(nu m,de n) G仁ZPk(G) Z=tzero(G) P=pole(G) pzmap( nu m,de n); title('pole-zero Map') rlocus( nu m,de n) 3 2 Root Locus O 2 RrXA Vy8np9a 卩 Real AXiS (三)增加开环极点对根轨迹的影响 由绘制根轨迹的法则,增加一个开环极点,対系统的根轨迹育以下影响: (1) 改变了根轨迹在实轴上的分布’ (2) 改变了根轨迹渐近线的条数、倾角和截距。 (3) 改变了根轨迹的分支数。 (4) 根轨迹曲线向右偏移,不利于改善系统的动态性能?所増 加的极点越靠近虚轴,这种影响就越大乜 1、实验前利用图解法画出系统的根轨迹(G(S)H(S) 厂上 ), S(S + 4 s +16) 算出系统稳定的增益范围,与仿真界面所得的值相比较 Real AXiS 2、利用图解法绘制根轨迹的8个规则是什么? 3. 闭环极点为实根时响应曲线的形状如何?有共轭复根时响应曲线的形状如何?
相关主题
文本预览