
20083702机电工程技术!""#年第$%卷第"!期高频信号注入法进行永磁同步电机转子位置
检测的信号采集系统
陈立权,齐
昕,王长松,王辉(1.上海交通大学机械与动力工程学院,上海200240;2.日照职业技术学院机电工程学院,山东日照276826)收稿日期:2007-09-21摘要:本设计实现了高频信号注入法进行转子位置检测的信号采集系统。用F2812在产生PWM波同时产生注入电机的高频脉动信号。采用Max274的带通滤波器和用OPA2132设计的低通滤波器进行滤波,然后通过ADS8364进行模数转换来采集信号,以中断的方式传送到F2812。实践表明,该系统满足实际数据采集的要求。
关键词:ADS8364;Max274;有源滤波;TMS320F2812;高频信号注入;信号采集
中图分类号:TP274文献标识码:A文章编号:1009-9492(2008)02-0055-03
1引言
永磁同步电机(Permenent-MagnetSynchronousMotor)
以其高效率、结构紧凑、易维护和调速性能好等一系列
优点得到越来越广泛的应用。但传统的永磁同步电机需
要位置传感器来实现电机的换相,如霍尔器件、光学编
码器和旋转变压器等,这些传感器会增加电机转子轴上
的转动惯量,加大电机空间尺寸和体积,有的分辨率低
或运行特性不好,有的对环境条件很敏感,潮湿和温度
变化都会使性能下降,使得整个传动系统的可靠性难以
得到保证。因此,无位置传感器控制成为一个重要研究
课题。目前应用比较广泛的无传感器转子位置检测方法
是反电势法(BackElectroMotiveForce,简称为BEMF)。
但是反电势法也存在固有的局限性,首先这种方法需要
利用基波电压和电流信号来计算转子的位置和速度,因
此对电机参数变化很敏感,鲁棒性差,其次在零速或者
低速检测时会因反电势过小或根本无法检测而失败,所
以只适用于高转速运行。为了在低速和零速下获得转子
位置的精确信息,一些学者提出了转子凸极追踪法,这
种方法要求电机具有一定程度的凸极性,而且需要注入
持续高频激励。转子凸极追踪法的基本原理是:在电机
定子绕组上注入高频电流或电压信号,然后检测定子绕
组中对应的电压或电流信号,再通过一系列的坐标变换
来提取转子的位置信息[1]。高频信号注入分为旋转高频信号注入和脉动高频信号注入,对于永磁同步电机来说,
脉动高频信号注入法原理清晰,结构简单,鲁棒性能好,
因此本文采用脉动高频信号
[2]。
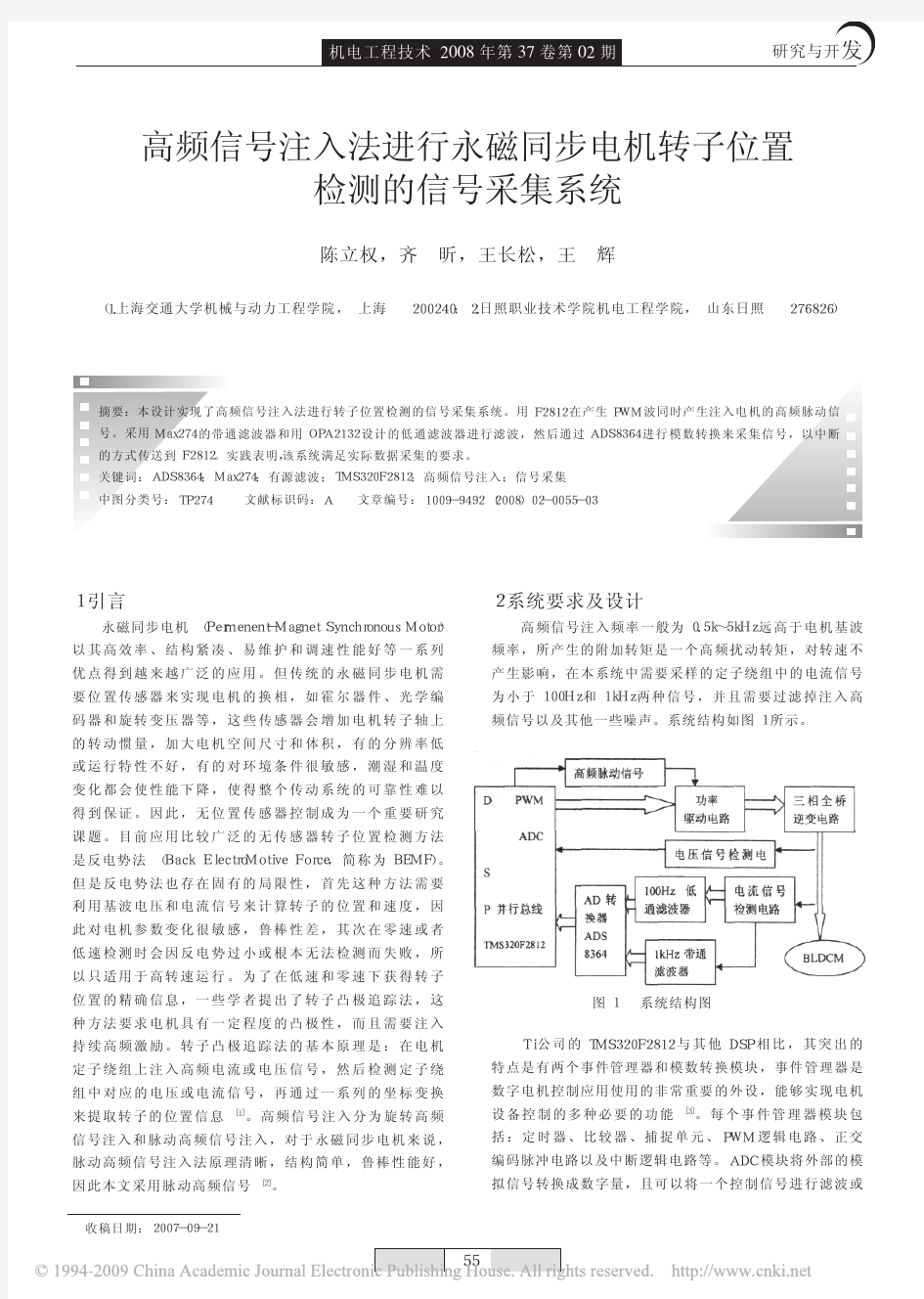
2系统要求及设计高频信号注入频率一般为0.5k~5kHz远高于电机基波频率,所产生的附加转矩是一个高频扰动转矩,对转速不产生影响,在本系统中需要采样的定子绕组中的电流信号为小于100Hz和1kHz两种信号,并且需要过滤掉注入高频信号以及其他一些噪声。系统结构如图1所示。Ti公司的TMS320F2812与其他DSP相比,其突出的特点是有两个事件管理器和模数转换模块,事件管理器是数字电机控制应用使用的非常重要的外设,能够实现电机设备控制的多种必要的功能[3]。每个事件管理器模块包括:定时器、比较器、捕捉单元、PWM逻辑电路、正交编码脉冲电路以及中断逻辑电路等。ADC模块将外部的模
拟信号转换成数字量,且可以将一个控制信号进行滤波或图1系统结构图研究与开发
20083702机电工程技术!""#年第$%卷第"!期
图4二阶滤波单元的原理图
图2ADS8364接口电路图图3AD工作流程图者实现运动系统的闭环控制,因此在电机控制系统当中,
多采用ADC模块来采集电机的电流或电压实现电流环的
闭环控制。3ADS8364及其采集功能的实现
ADS8364是高速、低功耗、六通道同时采样和转换的
十六位模数转换器。采用+5V工作电压,80dB共模抑制的
全差分输入通道,还包括六个4μs连续近似的模数转换
器,六个差分采样放大器,带REFIN和REFOUT引脚的
内部+2.5V参考电压,以及高速并行接口。六个模拟输入
分为三组(A,B和C)每个输入端有一个ADCs和保持信
号用来保证几个通道能同时进行采样和转换,采样频率可
以达到250kSPS。差分输入范围可从-VREF到+VREF之间
变化[4]。触发ADS8364的RST引脚可以确保读指针指向
每个通道的第一个转换的数据。ADS8364的HOLDx低电
平有效,如果同时将3个HOLD置低,6个通道将同时采
样。图2为ADS8364与TMS320F2812的接口电路,系统
采用F2812的ADCLK经过倍频产生占空比为50%的4.4MHz的时钟,为ADC提供时钟。使用XZCS2作为ADS8364的片选信号。由于F2812使用XZCS2作为其
XINTF区域2(0x0008~
0000至0x0010~0000)
的片选。因此ADS8364
与F2812通过XINTF区
域2实现无缝连接而不
需要额外的解码。图2
中的PTOUT为模拟信号
的输入,经过差分电路
输入到ADS8364的模拟
输入通道A0。ADS8364
的ADD和BYTE引脚接
地,因此选择16位数据输出方式,并且对每个通道转换结果的读取通过地址线A0、A1、A2来选择。
ADS8364的EOC与F2812的中断引脚XINT13相连当转换结束时EOC会产生一个脉冲信号,从而触发F2812进入中断处理程序,将RD和CS引脚置低读取数据。ADS8364的工作流程图如图3所示。4滤波器的设计4.1带通滤波器的设计由于带通的采样频率为1kHz±200Hz,加上带宽比较窄而且对截至频率要求比较高。因此我们选择了美国MAXIM公司开发的8阶连续时间有源滤器芯片MAX274将4个二阶节合而为一,最高中心设计频率可达150kHz
[5]。该滤波器不需要外置电
容,每个单元二阶节的中心
频率F0、Q值、放大倍数均
可由其外接电阻R1~R4的设
计来确定。集成化后的二阶
节较之由运放和R、C电路组
成的二阶节,其外接元件少、
参数调节方便、不受运放频
响影响,对电路杂散电容也
有更好的抗干扰性。MAX274
内部有数个2阶状态可变滤
波器单元,可实现巴特沃斯
型、贝塞尔型及切比雪夫全
通型滤波器。采用MAX274~
275芯片设计高阶的带通滤波
器,对于相
同
设
计指标,切
比雪夫和椭圆函数型滤波器所需二阶节数少于巴特沃斯、
贝塞尔型。由于MAX274不支持椭圆函数型带通滤波器结研究与开发
20083702机电工程技术!""#年第$%卷第"!期图5六阶低通滤波器原理图
图6频率响应特性和建立时间响应特性
构,所以,我们选择设计了高阶切比雪夫带通滤波器结构。图4是二阶滤波单元的原理图。其中BPO、LPO分别为带通和低通输出,后一个运放输入端的5k电阻将积分电容与外管脚的寄生电阻隔离,大大提高了滤波器极点的精度。BPI为带通输入,Fc为工作方式及频率选择。不用外接电容,只需外接电
阻,就可实现工作频率从100Hz到150kHz的低通、带
通滤波器,其中心频率、转折频率、Q值、放大倍数等
均可由外接电阻加以确定,参数调整十分方便,且由于
是单片结构,高频工作时基本不受杂散电容的影响。另
外,电源电压(V+/V-)为±2.37V~±5.50V,电源电流
不超过30mA,R1~R4阻值大小均由Maxim公司专用软
件设计得到。
4.2低通滤波器的设计
低频率波的波形大约在50Hz左右,因为MAX274的
工作频率>100Hz所以无法达到要求,因此采用了BB公司
的OPA2132运算放大器设计了6阶有源滤波器。OPA132
系列是FET输入,高SR并有卓越直流性能的运放,它具
有高SR、宽带、建立时间短的特点,有单、双、四运放
性能一致,可稳定用于单位增益状态。该芯片具有超宽电
源范围(±2.5V~±18V)、高积增益带宽(8MHz)、高转换
速度(20V/μs)、低噪声(8nV/Hzat1kHz)、超低失真
(THD+N:0.00008%)、共模抑止比(100dB)、开环增益
(130dB)等特点。其原理图如图5所示。
图6为低通滤波器的频率响应曲线和建立时间响应曲
线图,由图中曲线可以看出,低通滤波器有良好的截至频
率,并且建立时间比较短。
5系统延迟分析
本系统中有源滤波器、AD转换器都会产生相位滞后。
为了实现高精度的转子位置检测,将系统的延迟即相位滞
后进行总体分析然后进行角度补偿必不可少。
图7和图8分别为低通滤波器和带通滤波器的延迟。
由图7和图8中可以看出滤波器的延迟在不同频率有
不同的值,因此需要建立一个延迟时间与频率之间的关
系。低通滤波器的延迟在频率<50Hz时可以看作线性的,
即Y=a×X(Y为延迟时间、X为频率、a为常数)。带通滤
波器在800~1050Hz范围内可近似为Y=a(X-b)2+c(Y为
延迟时间、X为频率、a、b、c均为常数)因此,滤波器
的延迟可以确定。ADS8364的时钟信号由外部提供,转
换时间为20个时钟周期,最高频率为5MHz,在5MHz
的时钟频率下ADS8364转换时间为3.2μs,相应的数据
采集时间为0.8μs,每个通道的总的转换时间为4μs。由
此可以确定延迟只与采集信号频率即电机转速有关,从
(下转第84页)研究与开发
20083702机电工程技术!""#年第$%卷第"!期
图8带通滤波器的群延迟
图7低通滤波器的群延迟而可以采取自适应的补偿方法,即根据估算速度调节延
迟的补偿。6结论
对该信号采集系统的试验结果表明。该系统能够在有
用信号衰减很小的情况下将采样信号中的噪音滤除,实现
了窄带宽和低频率的滤波。并且能够将滤波后的信号由高
精度的模数转换器进行实时采样,对延迟的估计也与测试
结果接近,达到了高频信号注入法对信号采集的要求,效
果良好。
参考文献:
[1]秦峰,贺益康,刘毅,等.两种高频信号注入法的无传感器
运行研究[J].中国电机工程学报,2005,25(3):116-121.
[2]钟黎萍,巩宪锋,王长松,等.零速和低速下永磁同步电机转子位置估测方法[J].电机与控制应用,2006,33(5):33-37.[3]苏奎峰,吕强,耿庆锋,等.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.[4]ADS8364DataSheet[Z],U.S.ATexasInstruments,JUNE2002.[5]MAXIM.MAX274/275Datasheet[Z],MAXIMIntegeratedProducts2000.第一作者简介:陈立权,男,1982年生,河北衡水人,硕士研究生。研究领域:电机运动控制。(编辑:向飞)4结束语
本文应用MATLAB神经网络工具箱和BP神经网络理论,建立电厂水位控制系统的预测模型,通过优化仿真,
得出最优参数,取得满意的结果。研究结果证明了MAT-
LAB神经网络工具箱和BP神经网络对解决复杂的非线性
控制系统的设计问题有很好的效果。
参考文献:
[1]ThehelpofMATLAB(version6)[Z].TheMathworks.inc,
2000.
[2]丛爽.面向MATLAB工具箱的神经网络理论与应用[M].
合肥:中国科技大学出版社,2003.
[3]兰雪梅.BP网络的MATLAB实现[M].北京:微电脑应用,
2003,(1):6-8.
第一作者简介:蔡立,男,1980年生
,江苏镇江人
,
硕士研究
生。研究领域:测试仪表和测试技术。(编辑:王智圣)图4误差曲线
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
(上接第57页)
应用技术
信号检测综合训练 说明书 题目:振动信号检测系统设计 学院:电气工程与信息工程学院 班级:电子(2)班 姓名: 钱鹏鹏 学号:11260224 指导老师:缑新科 2014.12.07
摘要 机械在运动时,由于旋转体的不平衡、负载的不均匀、结构刚度的各向异性、间隙、润滑不良、支撑松动等因素,总是伴随着各种振动。机械振动在大多情况下是有害的,振动往往会降低机器性能,破坏其正常工作,缩短使用寿命,甚至导致事故。机械振动还伴随着同频率的噪声,恶化环境,危害健康。另一方面,振动也被利用来完成有用工作,如运输、夯实、清洗、粉碎、脱水等。这时必须正确选择振动参数,充分发挥振动机械的性能。在现代企业管理制度中,除了对各种机械设备提出低振动和低噪声要求外,还需随时对机器的运行状况进行监测、分析、诊断,对工作环境进行控制。为了提高机械结构的抗振性能,有必要进行机械机构振动分析和振动设计,这些都离不开振动测试。 本文在此基础上设计了一种专用的振动信号检测系统,具有功耗低、体积小、精度高等优点。 信号检测的内容要求: 通过MCS-51系列单片机设计振动信号检测系统。要求如下: 1 振动信号的特点,选择合适的传感器,并设计相应的检测电路; 2 将设计完成的检测电路,通过软件防真验证; 3 主要设计指标:可测最大加速度:-5m/s~+5m/s;可测最大速度:-0.16m/s~+0.16m/s;可测最大位移:-5mm~+5mm;通频带:0.05Hz~35Hz;转换精度:8bit;采样频率:128Hz 4 利用LCD显示振动信号,有必要的键盘控制。
总体设计方案介绍: 本系统由发射电路和接收电路组成。发射电路主要由加速度传感器构成。接收电路由单片机最小系统和外部串口以及显示部分模块三部分组成。。 硬件电路设计: (1)使用MMA8452加速度传感器和STC89C52单片机来实现。 一.设计目的:了解加速度传感器的工作机理,以及单片机的各种性能; 二.设计器材:电源、proteus7.7软件、89C52,MMA8452加速度传感器,导线若干。 三.设计方案介:该系统目的是便于对一些物理量进行监视、控制。本设计以加速度传感器显示出加速度信号即振动信号,再通过单片机将信号从串口接入电脑显示出来,即完成振动信号的检测功能。 (2)振动传感器的分类 1、相对式电动传感器 电动式传感器基于电磁感应原理,即当运动的导体在固定的磁场里切割磁力线时,导体两端就感生出电动势,因此利用这一原理而生产的传感器称为电动式传感器。 相对式电动传感器从机械接收原理来说,是一个位移传感器,由于在机电变换原理中应用的是电磁感应电律,其产生的电动势同被测振动速度成正比,所以它实际上是一个速度传感器。 2、电涡流式传感器 电涡流传感器是一种相对式非接触式传感器,它是通过传感器端部与被测物体之间的距离变化来测量物体的振动位移或幅值的。电涡流传感器具有频率范围宽(0~10 kHZ),线性工作范围大、灵敏度高以及非接触式测量等优点,主要应用于静位移的测量、振动位移的测量、旋转机械中监测转轴的振动测量。 3、电感式传感器 依据传感器的相对式机械接收原理,电感式传感器能把被测的机械振动参数的变化转换成为电参量信号的变化。因此,电感传感器有二种形式,一是可变间隙,二是可变导磁面积。 4、电容式传感器 电容式传感器一般分为两种类型。即可变间隙式和可变公共面积式。可变间隙式可以测量直线振动的位移。可变面积式可以测量扭转振动的角位移。 5、惯性式电动传感器 惯性式电动传感器由固定部分、可动部分以及支承弹簧部分所组成。为了使传感器工作在位移传感器状态,其可动部分的质量应该足够的大,而支承弹簧的刚度应该足够的小,也就是让传感器具有足够低的固有频率。根据电磁感应定律,感应电动势为:u=Blx&r 。式中B为磁通密度,l为线圈在磁场内的有效长度,r x&为线圈在磁场中的相对速度。 从传感器的结构上来说,惯性式电动传感器是一个位移传感器。然而由于其输出的电信号是由电磁感应产生,根据电磁感应电律,当线圈在磁场中作相对运动
光电编码器选型及同步电机转速和 转子位置测量3 于庆广 刘葵 王冲 袁炜嘉 钱炜慷 张程 清华大学 摘要:光电轴角编码器,又称光电角位置传感器,是电气传动系统中用来测量电动机转速和转子位置的核心部件。对绝对式、增量式和混合式光电轴编码器的工作原理进行了综述,介绍了光电轴编码器的选型原则、转子速度的测量和转子位置的测量方法。最后,给出了同步电动机变频调速系统中转速和转子位置测量系统的实现。 关键词:光电轴编码器 混合式轴编码器 同步电机转子位置 Choice of Optical2encoder and Measure of Speed and R otor Place of Synchronous Motor Yu Qingguang Liu Kui Wang Chong Yuan Weijia Qian Weikang Zhang Cheng Abstract:Optical2encoder,which is also called photoelectric angei2position sensor,is the core device in measurement of motor speed and rotor position in drive system.There summarize the operating principle of ab2 solute、incremental and hybrid encoder,introduce the choice principle of optical2encoder model and the measur2 ing method of rotor speed and rotor position.The implementation of measuring method of rotor speed and ro2 tor position in variable frequency speed2regulated system of synchronous motor is also given. K eyw ords:optical2encoder hybrid2encoder rotor place of synchronous motor 1 引言 光电轴角编码器,又称轴编码器或光电角位置传感器。光电轴编码器以高精度计量圆光栅为检测元件,通过光电转换,将输入的角位置信息转换成相应的数字代码,并与计算机等控制器及显示装置相连接,实现数字测量、数字控制与数字显示[1]。光电轴编码器具有较高的性能价格比,已普遍应用在雷达、光电经纬仪、地面指挥仪、机器人、数控机床和高精度闭环调速系统等诸多领域,是电动机等自动化设备理想的角度和速度传感器。轴编码器主要分为增量式、绝对式与混合式3种,其中增量式轴编码器主要用于测量转子速度,绝对式轴编码器主要用于测量转子的空间位置,混合式轴编码器是增量式轴编码器与绝对式轴编码器的组合。后端加入处理芯片之后,3种轴编码器都具有测量转子速度与空间位置的功能。本文综述了光电轴编码器的种类和选型原则,介绍了转速和转子位置的测量方法;最后,给出了同步电动机变频调速系统中转速和转子位置测量系统的实现。 2 光电轴编码器 2.1 增量式轴编码器 典型的光电轴角编码器结构原理如图1 所示。 图1 光电轴编码器结构图 71 3清华大学大学生SR T项目(031T0144)
说明书摘要 本发明公开一种永磁同步电机转子初始位置的判断方法,步骤是:首先利用脉振高频电压注入法得到初次估计的转子位置,然后在初次估计的交轴上注入一个正方向扰动信号,再估计转子位置,根据估计得到的转速方向判断磁极极性,得到电机转子初始位置。此种方法可解决脉振高频电压信号注入法检测转子初始位置时磁极极性的收敛问题,无需在直轴上注入正负方向的脉冲电流,可以有效地实现转子初始位置估算。
摘要附图
1、一种永磁同步电机转子初始位置的判断方法,其特征在于包括如下步骤: (1)在??d q -估计同步旋转坐标系的?d 轴上注入高频电压信号?cos()d mh h u U t ω=,给定?q 轴电压?0q u =; (2)检测电机的两相电流,并经过Clarke 和Park 坐标系变换,得到??d q -估计同步旋转坐标系的?q 轴电流?q i ,并依照以下步骤估计转子的位置和转速:首先,将检测得到的?q 轴电流?q i 乘以调制信号cos()t h u t ω=;然后,对相乘后所得的信号低通滤波,得到?q 轴电流?q i 的幅值信号()f θ?;最后,对该幅值信号()f θ?进行PI 调节,得到估计转速?ω ,对估计转速?ω积分得到估计的转子位置; (3)重复步骤(2),直至估计的转子位置收敛为一恒定值,即为初次估计 的转子位置?first θ; (4)在??d q -估计同步旋转坐标系的?d 轴上注入高频电压信号?cos()d mh h u U t ω=,在?q 轴注入一个正方向扰动信号,重复步骤(2),直至电机转过一定角度γ,0γ>; (5)根据步骤(3)估计得到的转速方向判断磁极极性,当转速为正时,收 敛的磁极极性为N 极,转子初始位置??=initial first θθ;当转速为负时,收敛的磁极极性为S 极,转子初始位置??=initial first θθπ+。 2、如权利要求1所述的一种永磁同步电机转子初始位置的判断方法,其特 征在于:所述步骤(1)中,采用转子的估计位置?θ进行Park 逆变换,获得实际两相静止坐标系下电压的给定值?u α和?u β。
2012年TI杯四川省大学生电子设计竞赛 微弱信号检测装置(A题) 【本科组】
微弱信号检测装置(A题) 【本科组】 摘要:本设计是在强噪声背景下已知频率的微弱正弦波信号的幅度值,采用TI公司提供的LaunchPad MSP430G2553作为系统的数据采集芯片,实现微弱信号的检测并显示正弦信号的幅度值的功能。电路分为加法器、纯电阻分压网络、微弱信号检测电路、以及数码管显示电路组成。当所要检测到的微弱信号在强噪音环境下,系统同时接收到函数信号发生器产生的正弦信号模拟微弱信号和PC机音频播放器模拟的强噪声,送到音频放大器INA2134,让两个信号相加。再通过由电位器与固定电阻构成的纯电阻分压网络使其衰减系数可调(100倍以上),将衰减后的微弱信号通过微弱信号检测电路,检测电路能实现高输入阻抗、放大、带通滤波以及小信号峰值检测,检测到的电压峰值模拟信号送到MSP430G2553内部的10位AD 转换处理后在数码管上显示出来。本设计的优点在于超低功耗 关键词:微弱信号MSP430G2553 INA2134 一系统方案设计、比较与论证 根据本设计的要求,要完成微弱正弦信号的检测并显示幅度值,输入阻抗达到1MΩ以上,通频带在500Hz~2KHz。为实现此功能,本设计提出的方案如下图所示。其中图1是系统设计总流程图,图2是微弱信号检测电路子流程图。 图1系统设计总流程图 图2微弱信号检测电路子流程图
1 加法器设计的选择 方案一:采用通用的同相/反相加法器。通用的加法器外接较多的电阻,运算繁琐复杂,并且不一定能达到带宽大于1MHz,所以放弃此种方案。 方案二:采用TI公司的提供的INA2134音频放大器。音频放大器内部集成有电阻,可以直接利用,非常方便,并且带宽能够达到本设计要求,因此采用此方案。 2 纯电阻分压网络的方案论证 方案一:由两个固定阻值的电阻按100:1的比例实现分压,通过仿真效果非常好,理论上可以实现,但是用于实际电路中不能达到预想的衰减系数。分析:电阻的标称值与实际值有一定的误差,因此考虑其他的方案。 方案二:由一个电位器和一个固定的电阻组成的分压网络,通过改变电位器的阻值就可以改变其衰减系数。这样就可以避免衰减系数达不到或者更换元器件的情况,因此采用此方案。 3 微弱信号检测电路的方案论证 方案一:将纯电阻分压网络输出的电压通过反相比例放大电路。放大后的信号通过中心频率为1kHz的带通滤波器滤除噪声。再经过小信号峰值电路,检测出正弦信号的峰值。将输出的电压信号送给单片机进行A/D转换。此方案的电路结构相对简单。但是,输入阻抗不能满足大于等于1MΩ的条件,并且被测信号的频率只能限定在1kHz,不能实现500Hz~2KHz 可变的被测信号的检测。故根据题目的要求不采用此方案。 方案二:检测电路可以由电压跟随器、同相比例放大器、带通滤波电路以及小信号峰值检测电路组成。电压跟随器可以提高输入阻抗,输入电阻可以达到1MΩ以上,满足设计所需;采用同相比例放大器是为了放大在分压网络所衰减的放大倍数;带通滤波器为了选择500Hz~2KHz的微弱信号;最后通过小信号峰值检测电路把正弦信号的幅度值检测出来。这种方案满足本设计的要求切实可行,故采用此方案。 4 峰值数据采集芯片的方案论证 方案一:选用宏晶公司的STC89C52单片机作为。优点在于价格便宜,但是对于本设计而言,必须外接AD才能实现,电路复杂。
微电信号检测系统 摘要:文中基于高速DSP数字采集系统,提供一种通过仪用放大器芯片ad620及滤波处理电路实现对微弱电信号的前置处理及采集的实用性方法。经实验与检测,该设计可以有效的对微弱信号进行实时采集,且滤波、去噪、放大效果较好。 关键词:微弱信号;DSP;仪用放大器;陷波电路 引言: 微电信号检测技术是一门新兴的技术学科,是利用电子学、信息论和物理学的方法,分析噪声产生的原理和规律,研究被测信号的特点与相关性,检测被噪声背景淹没的微弱信号。能在噪声背景中检测信号的微弱信号检测仪器,为现代科学技术和工农业生产提供了强有力的测试手段。应用范围遍及几乎所有的科学领域,已成为现代科技必备的常用仪器。国外很多大学和公司都在从事不同领域的微信号检测的研究和相关芯片的研发工作。且随着仿生智能学的发展,是人们日益认识到若想更加深入的了解生物体内部结构,归根到底就是对人体各种微电信号的采集和处理及分析,所以研究微电信号的采集和处理具有很深远的意义。本文设计了一种微电信号采集和处理系统,通过电路的设计实现了对微弱电信号采集。 一.系统原理介绍 如图所示的是系统的整体设计框图,整个系统由三部分组成:前置仪用放大电路[1]、中间级处理电路、信号采集识别电路。由传感器传来的微弱信号经由前置仪用放大电路放大后经由中间级处理电路的滤波、增益调节及陷波后调制成复合信号采集识别电路可采集及识别的信号,将模拟信号转变为数字信号输入到DSP数字控制电路后序处理。 图1系统原理框图 二、主要功能模块实现电路 2.1前置仪用放大电路 前置放大电路主要考虑噪声、输入阻抗和共模抑制比等的影响。电路如图2所示,包括输入缓冲、高频滤波和仪用放大电路三部分。前置放大电路的最前级直接采用了电压跟随器的设计,此种设计在理论上输入阻抗无穷大,有效的将信号输入源与电路系统隔离,去除了信号源内阻高且不稳定的影响。仪用放大器因为其经典的三运放结构而具有较高的输入阻抗和共模抑制比,并且只需外接一个电阻即可设定增益,在生物信号处理领域被广泛地应用。本文选用的AD公司的AD620。 图 2 前置放大电路 2.2中间级处理电路 中间级处理电路分为带通选频网络[2]、二级放大电路、50Hz陷波器[3]和增益调节电路[4]等。带通选频网络由RC无源网络组成,简单可靠,通带的最大范围设定为0.05kHz~10kHz(在本文设计中是对以上频率做的通带范围,若信号源信号超出此范围改变滤波电路的具体器件参数可改变通带范围)。根据不同信号的差异,可以对信号的放大倍数进行调整,以适合后续数字控制电路对数据的采集的要求。在图3-图6分别给出以上四部分的电路设计原理图。 2.3信号采集电路
基于AD549的微光信号检测系统 引言 近年来,随着微光技术及生物芯片技术的高速发展,各类的传感器、光电器件应运而生,广泛应用于工业,农业,军事等各大领域。然而技术水平的不断提高就要求研究设备对微光信号的响应程度的大幅提高。微光信号检测是发展高新技术、科学研究的重要手段,微光信号检测精度的高低往往会对产品的性能等起到决定性的作用。 在微光信号检测系统中,通常光电转换器件接收到的光信号都十分的微弱,转换后的电信号也非常的小(nA量级)。因此,放大器噪声,背景噪声,电路噪声,外界电磁干扰等都会对检测系统的精度产生极大的影响。为此,选择一个合适的低噪声高精度的前置放大器就显得至关重要了。本文的微光信号检测系统选用的前置放大器是AD549。它是具有极低输入偏置电流的单片电路静电计型运算放大器。为达到高精度的目的,输入偏置电压和输入偏置电压漂移均通过激光调节。这种极低输入电流性能由ADI公司专有的topgate工艺技术完成。这样的放大器很好的满足了系统的需要。 1.微光信号检测系统的原理框图 微光信号检测系统的原理框图如图1所示。光信号由光电阴
极转换为电信号输入到前置放大器中,经过一级放大的电压信号由二级放大器放大之后再输入到AD转换器件中转换成数字信号,之后经由单片机控制显示出来。为了防止模拟电路同数字电路间的串扰,及前置放大器屏蔽的需要,本系统将两部分的电路分离开来。光电检测电路由光电阴极和前置放大器AD549组成,数字显示电路由二级放大器OPA124PA,AD转换器件ADS7816,单片机及数字显示电路组成。 图1 微光信号检测系统的原理框图 2.光电检测电路 2.1 光电检测电路原理 图2 光电检测电路
无刷直流电机转子位置检测的新方法 作者:山东大学陈瑜黄玉王兴华 要 摘要:介绍了无刷直流电机无位置传感器转子位置检测的一种新方法。该方法利用非导通相反电势逻辑电平经逻辑处理后得到一脉冲列,采用PLL锁相技术将脉冲列倍频,通过倍频电路计数器的计数值可以精确检测转子位置。利用数字比较技术将计数值与锁存器中的预置数值比较,可以精确控制绕组电流的最佳换向时刻。通过调节锁存器中的预置值可以方便地调节换向角,非常适用于无刷直流电机的各种控制算法。同时该方法克服了外同步起动过程中易产生的振荡和失步现象。通过实验证明该方法是正确的、有效的。 关键词:无刷电机;无位置传感器;检测 1引言 无刷直流电机运行时需要采用位置传感器检测转子磁场位置信号,以控制逆变器功率管的换流,实现电机的自同步运行。传统的位置传感器是采用电子式或机电式传感器件直接测量,如霍尔效应器件(HED)、光学编码器、旋转变压器等。然而,这些传感器有以下缺点: ①分辨率低或运行特性不好,有的对环境条件很敏感,如振动、潮湿和温度变化都会使性能下降。 ②增加了电气连接数目,给抗干扰设计带来一定困难。 ③占用电机结构空间,限制了电机的小型化。 因此,无刷直流电机的无位置传感器化技术近年来日益受到人们的关注,国内外研究人员在这方面进行了积极的研究,提出了诸多方法,主要可分为反电势法、电感法、磁链法、旋转坐标系法、观测器法、卡尔曼滤波器法等[1~4]。反电势法简单、可靠,得到了广泛应用,其它方法由于计算复杂、对参数的鲁棒性差等原因应用较少。但反电势法的缺点是: ①低速时反电势小,难以得到有效转子位置信号,系统低速性能差。 ②需用低通滤波器去掉端电压中高频噪声并移相30°以满足换流要求,对滤波器要求较高,同时滤波器容易产生移相误差,而且移相误差大小与速度有关,难以补偿[5]。 ③对换相角调节困难,无法控制换相角γ(超前或滞后)的大小。 ④若采用外同步脉冲起动,当驱动信号由外同步脉冲驱动向内同步脉冲驱动切换时,由于切换点的相位误差易产生振荡甚至失步[6]。 针对以上问题,本文提出了一种新型转子位置检测的方法,以三相6拍运行的无刷直
第4章 数控检测装置 4.1数控检测装置的概述 检测元件是闭环、半闭环伺服系统的重要组成部分。在闭环数控系统中,必须利用位置检测装置把机床运动部件的实际位移量随时检测出来,与给定的控制值(指令信号)进行比较,从而控制驱动元件准确运转,使工作台(或刀具)按规定的轨迹和坐标移动。因此,位置检测装置是数控机床的关键部件之一,它的精度直接影响数控机床的定位精度和加工精度。为此,对位置检测装置提出如下要求: (1)高可靠性和高抗干扰性; (2)满足精度和速度要求; (3)使用、维护方便,适合机床的运行环境; (4)成本低,寿命长。 对于不同类型的数控机床,因工作条件和检测要求不同,可以采用不同的检测方式。 ∑==n i i Z Z 1总 4.1.1对位置检测装置的要求 在数控机床中,数控装置是依靠指令值与位置检测装置的反馈值进行比较,以此来控制工作台运动的。位置检测装置是CNC 系统的重要组成部分。在闭环系统中,它的主要作用是检测位移量,并将检测的反馈信号和数控装置发出的指令信号相比较,若有偏差,经放大后控制执行部件,使其向着消除偏差的方向运动,直到偏差为零为止。为了提高数控机床的加工精度,必须提高测量元件和测量系统的精度,不同的数控机床对测量元件和测量系统的精度要求、允许的最高移动速度各不相同。现在检测元件与系统的最高水平是:被检测部件的最高移动速度至240m/min 时,其检测位移的分辨率(能检测的最小位移量)可达1μm ,相当于24m/min 时可达0.1μm 。最高分辨率可达0.01μm 。因此,研制和选用性能优越的检测装置是很重要的。 。 ‘ 数控机床对位置检测装置的要求如下: (1)受温度、湿度的影响小,工作可靠,能长期保持精度,抗干扰能力强; (2)在机床执行部件移动范围内,能满足精度和速度的要求; (3)使用维护方便,适应机床工作环境; (4)成本低; (5)易于实现高速的动态测量。 4.1.2检测装置的分类 按工作条件和测量要求的不同,测量方式亦有不同的划分方法,位置检测装置分类如表4—1所示。 表4—l 位置检测装置分类
基于高频电压注入法的永磁同步电机转子初始位置检测 Initial Rotor Position Inspection of PMSM Based on Rotating High Frequency Voltage Signal Injection 北京航空航天大学自动化科学与电气工程学院蔡名飞周元钧 摘要:为了解决新型无位置传感器永磁同步电机的起动问题,提出了一种在电机静止状态下检测转子位置的新方法。 该方法在算法上改进了传统的旋转高频电压注入法,使得可以更为快速、准确的检测出转子初始(均扫位置。并且针对传统旋转高频电压注人法无法检测出转子永磁体极性问题,在dq旋转坐标系下,通过分析永磁同步卜匕机d轴磁链和定子电流之间的关系,利用d轴电流的泰勒级数展开,提出J’根据定子铁芯非线性磁化特性获得判另}J N/S极极性信息的新方一案。最后,建立了系统仿真模型。仿真结果验证了这种方法的有效性和可行性。此方法同样适用于永磁同步电机在中、低速时的转子位置检测。 关键词:永磁同步电机转子初始位置旋转高频注人非线性磁化特性N/S极极性 1引言 永磁同步电机高精态、高动态性能的速度、位置控制,都需要准确的转子位置信息。如果位置检测误差较大,会导致电机不能正常起动、运行。传统方法是通过机械式传感器来测量转子的速度和位置。但机械式传感器减低了系统的可靠性,增加了系统的成本;同时传感器对环境有着严格的要求,电磁干扰、温度、湿度、振动对它的测量精度都有影响。特别针对某些航空伺服电机,长期工作在恶劣、复杂的环境中,所以研究无位置传感器不仅可 以减少航空电机成本,而且可以减少不必要的引线,将大大提高整个系统的可靠性〔‘]。 最简单的无位置传感器控制方法是文献「2]提出的基于对检测到的电机反电动势进行积分,这种方法虽然简单,但是在零速或低速阶段因为反电动太小,难以检测而失败。后来人们又提出了高频注人法,其主要思想是用电机固有的空间凸极或凸极效应可以实现对转子位置的检测,这种方法与转速没有直接关系,有效克服了反电动势法的 缺陷。文献〔3]提出通过处理电流高频响应,采取求导取极值计算电机的初始位置,但这种方法存在震荡现象,高频电流也会因滤波器移相导致检测误差,并且也没有给出电 机N/S极极性检测方法。文献【4]提出在电机中注人幅值相同、方向不同的系列脉冲,检测并比较相应电流的大小来估计转子的位置。这种方法可行但是对注入脉冲的电压幅 值和时间控制要求比较高,操作复杂,检测时间过长。文献[[5][6]通过注人高频信号引起PMSM的d,q轴磁链饱和程度差异实现初始位置检测,这种方法高频电流信号提取复 杂,容易带来计算误差,难以做到转子位置的实时检测跟踪。文献〔7l所使用的电机经过特殊设计,不具普遍性,仅适用于理论研究。 为了解决以上方法的存在的问题,本文提出了一种基于旋转高频电压注人法的永磁同步电机转子初始位置检测的新方法。在电机静止状态下,通过向电机定子三相绕组中注入高频电压信号,利用电机凸极效应,通过处理高频电流响应,得出转子的位置信号。为此,本文进行了仿真研究,实现了转子d轴位置和N/S极极性的快速、准确检测。 2高频激励下的永磁同步电机的数学模型
第1章绪论 1.1 研究背景和意义 随着社会和科学技术的不断进步,人们对生命现象的认识也越来越深入,生物医学信号的检查是对人体健康状况评估的手段。在医院里,通过检查必要的生物医学数据,医生可以对病人健康程度做一个评估,并且根据数据诊断出病患所得的疾病以及康复状况。同时,医药保健类产品早已经不是医院的专利,以家庭为单位,几乎每个家庭都配备了必要的医疗保健类用品[1-3]。在适宜的医疗设备条件下,病人可以不依靠医生的辅助,自己采集医学生理数据,通过医学根据对此参数分析,评估健康水平或者诊断自身是否有疾病。现代的医疗仪器给人民生活带来了便捷,在智能化、便携式、可靠性、安全性等方面都有了很大的提高。仪器在实现功能的同时都有不同的特点,有的仪器便于携带,有的仪器操作简单。当然,结合众多优点的仪器无疑受到消费者的青睐。以医院为单位,因为测量出来的数据可以直接提供给医生作为诊断或评估病人身体状况的参考,所以这类医疗仪器性能高、功能强大、测量数据准确。而对于以家庭或个人来说,在保证功能的同时,方便测量生理数据、便于携带、价格低廉、智能化这些特点是此类医疗仪器发展的趋势。 作为诸多生理信号的一种,脉象信号蕴含着丰富的信息,从脉搏波中提取人体的生理病理信息作为临床诊断和治疗的依据,历来都受到中外医学界的重视。脉搏波所呈现出的形态(波形)、强度(波幅)、速率(波速)和节律(周期)等方面的综合信息,在很大程度上反映出人体心血管系统中许多 生理病理的血流特征[4]。许多中医文献分析脉象的形成和西医分析虽然表、述各有不同,但是有相同的科学原理。 人体循环系统由心脏、血管、血液所组成,负责人体氧气、二氧化碳、养分及废物的运送。血液经由心脏的左心室收缩而挤压流入主动脉,随即传递到全身动脉。当大量血液进入动脉将使动脉压力变大而使管径扩张,在体表较浅处动脉即可感受到此扩张,即所谓的脉搏[1]。 正常人的脉搏和心跳是一致的。脉搏的频率受年龄和性别的影响,婴儿每分钟
采用增量式光电编码器作为位置检测元件的PMSM伺服电机,必须要在系统刚上电时就测得电机精确的初始位置。因为在永磁伺服驱动系统中,电机转子的位置检测与初始定位是系统构成与运行的基本条件,也是矢量控制解耦的必要条件。只有永磁同步电机的转子位置能够准确知道,才可以按照矢量控制的一系列方程,将永磁同步电机等效变换成dq坐标系上的等效模型,系统才能按照类似他励直流电机的控制方法对永磁同步电机进行控制,从而可以达到他励直流电机构成的伺服传动系统的性能指标要求。使用增量式光电编码器测量电机位置的伺服系统中, 系统上电后需要先检测出电机的初始位置。电机的初始位置不仅影响伺服系统的定位精度, 而且会对电机的快速启动性能造成一定的影响。 在系统刚刚上电,电机尚未运行时,系统开始测量转子的初始位置,此过程只需要电流环工作,根据伺服系统运行要求,在寻找初始位置的过程中,只允许有很微小的抖动,并且要求很快回归原位。 假设,采用H45-8-2500-WL型光电编码器,电机转动过程中,编码器输出的信号:A(/A)、B(/B)、Z(/Z)、U(/U)、V(/V)和W(/W),如图1(b)所示。其中A(/A)、B(/B)两组信号为相差相位角的同频率信号,分辨率为2500PPR,通过判断两组脉冲的相位可以判断出电机的旋转方向,这两组信号经4倍频之后,电机空间位置的分辨率变为10000PPR。脉冲Z (/Z)是同步信号,电机每旋转一周产生一个信号,其产生的位置固定,即电机转子转到该位置时发出信号(零位信号)。 如图1所示为伺服电机混合式光电编码器的码盘结构及输出信号波形。码盘的中间码道为刻有高密度的增量式透光缝隙(2000,2500,3000PPR等),两边分布两组互成的三个缝隙,受光元件(Photo-Diode Array)接收到发光元件(LED)通过缝隙的光线而产生互差的三相信号,经过放大整形后输出矩形波信号U(/U)、V(/V)和W(/W)。利用这些信号的组合状态来分别代表磁极在空间的不同位置。U(/U)、V(/V)和W(/W)三相脉冲信号每转的脉冲个数与电机的极对数相一致。根据U(/U)、V(/V)和W (/W)三相脉冲的高低电平关系可以判断电机磁极的当前位置。其过程是:电机启动前,通过U(/U)、V(/V)和W(/W)三相脉冲的状态估算出电机磁极位置,即当前的角度,一旦电机旋转起来,光电编码器的增量式部分可以精确地检测出位置值。这里,伺服电机极对数为4对极,则每相输出信号U(/U)、V(/V)和W(/W)的周期为空间,在每个周期中可以组合成6种状态,每种状态代表空间角度范围为。
信号检测与估计考试题库 考试内容: 1.随机信号分析 平稳随机信号与非平稳随机信号,随机信号的数字特征,平稳随机过程,复随机过程,随机信号通过线性系统。 2.信号检测 信号检测的基本概念,确知信号的检测(包括匹配滤波原理、高斯白噪声中已知信号检测、简单二元检测) 3.信号估计 信号参数(包括贝叶斯估计、最大似然估计、线性均方估计和最小二乘估计),信号波形估计(主要指卡尔曼滤波)。 一、填空(1x15=15) 1.可以逐一列举的随机变量称为(离散型随机变量)随机变量;可能的取值占满一个连续区间的随机变量称为(连续型随机变量)随机变量。(P3) 2.服从正态分布的调幅噪声经过包络检波之后服从(瑞丽分布)分布。(P5) 3.(方差)就是描述随机变量的在其均值周围发散程度的度量。(P6) 4.全体观测结果构成的函数族称为(随机过程)。(P9) 5.一维分布函数只能反映随机过程在某一时刻的统计规律,随机过程在不同时刻的相互联系需要用(多位分布函数)来描述。 6.有一类随机过程的统计特征(不随时间变化),称为平稳随机过程。(P12) 7.线性时不变(LTI)系统的特性在时域用冲击响应(h(t))来描述,在频域用频率响应函数(H(W))来描述。(P15) 8.高斯分布的随机过程通过LTI系统后是(高斯过程)过程。(P16) 9.高斯过程是随机过程的概率密度函数为__________,白噪声是指具有均匀(功率谱密度恒为常数)的随机信号。(P17) 10.在信号传输和处理过程中,经常会受到各种干扰,使信号产生失真或受到污染,这些干扰信号通常称为(噪声)。(P18) 11.白噪声的均值为(零)。(P18) 12.功率谱密度恒为常数的随机信号称为(白噪声)。(P18) 13.限带白噪声的相关函数比理想白噪声的相关函数宽,(既噪声的相关时间加长)。(P20) 14.在雷达系统中要根据观测(回波信号)来判断目标是否存在。(P49) 15.为了寻找未知先验概率情况下的最佳判决准则,首先研究(风险)与先验概率之间的关系。(P58) 16.高斯白噪声是指功率谱密度为(功率谱密度为常数),服从正态分布的噪声。(P74) 17.非白噪声背景匹配滤波器的关键是(白化滤波器)的设计。(P90) 18.所谓均匀代价函数是指当误差超过某一门限值时,代价是(相同),而当误差小于该门限时,代价(为零)。(P106) 19.估计量的性质有(无偏性)、(有效性)_和(一致性)(P109) 20.加权最小二乘法利用了观测噪声的统计特性,并且主要是针对(非平稳噪声)。(P132) 二、选择(2x15=30) 1.标准正态分布的期望和方差分别为(A)(P4) A.0,1 B.1,0 C.1,1 D.0,0
基于DSP的微弱信号检测采集系统设计 通常所用的数据采集系统,其采样对象都为大信号,即有用信号幅值大于噪声信号。但在一些特殊的场合,采集的信号很微弱,其幅值只有几个μV,并且淹没在大量的随机噪声中。此种情况下,一般的采集系统和测量方法无法检测该信号。本采集系统硬件电路针对微弱小信号,优化设计前端调理电路,利用测量放大器有效抑制共模信号(包括直流信号和交流信号),保证采集数据的精度要求。针对被背景噪声覆盖的微弱小信号特性,采用简单的时域信号的取样积累平均方法,有利于减少算法实现难度。 DSP芯片因其具有哈佛结构、流水线操作、专用的硬件乘法器、特殊的DSP指令、快速的指令周期等特点,使其适合复杂的数字信号处理算法。本系统采用TI公司的TMS320C542作为处理器,通过外部中断读取ADC数据,并实现取样累加平均算法。 1. 取样积累平均理论 微弱信号检测(Weak Signal Detection)是研究从微弱信号中提取有用信息的方法。通过分析噪声产生的原因和规律,利用被测信号的特点和相干性,检测被背景噪声覆盖的有用信号。常用的微弱信号检测方法有频域信号的相干检测、时域信号的积累平均、离散信号的计数技术、并行检测方法。其中时域信号积累平均是常用的一种小信号检测方法。 取样是一种频率压缩技术,将一个高重复频率信号通过逐点取样将随时间变化的模拟量,转变成对时间变化的离散量的集合,从而可以测量低频信号的幅值、相位或波形。时域信号的取样积累方法是在信号周期内将时间分成若干间隔,在这些时间间隔内对信号进行多次测量累加。时间间隔的大小取决于要求恢复信号的精度。某一点的取样值都是信号和噪声
高灵敏度CCD光电信号检测系统的设计 0. 引言 图像传感器是目前最热门的技术之一,发展极为迅速[1-3]。采用CCD 图像传感器设计光谱仪,使得光谱仪具有测量快速、没有运动部件、体积小、重量轻、使用方便等一系列突出的优点,是光谱仪等科学仪器的发展方向[4-9]。 光谱光电检测系统对CCD输出信号处理的目的就是尽可能地消除各种噪声和干扰,又尽量减少有效信号细节的损失,保证输出幅度,提高输出信号的稳定性,使得CCD动态范围内检测到的信号强度随被测信号的变化成线性变化,同时为了便于计算机处理和大容量存储,还必须对CCD输出信号进行数字化处理[10-16]。 针对CCD的输出信号特点和光谱系统检测原则,设计了如图1所示的光电信号检测电路。整个设计分为电源设计、驱动电路设计、预处理、A/D转换以及微处理器五部分。限于篇幅,本文着重介绍CCD的输出信号预处理、A/D转换以及微处理器三部分的内容。 图1 IL-C6-2048C输出信号处理电路原理框图 1. 高性能CCD简介 本文采用的是加拿大DALSA公司生产的埋沟道型IL-C6-2048C线阵CCD。它主要的性能特点如下: (1)单输出 ,最大数据输出率可达25M;
(2)2048个有效光敏单元 ,每行另有5个隔离单元和4个遮光单元(遮光单元用于暗电流检测);在行转移时钟为750Hz时 ,25℃室温下 ,暗信号大小仅为8mV; (3)光敏单元的尺寸为13um×500um ,中心距为13um ,有效光敏阵列总长为26.6mm; (4)具有抗光晕(Anti-Blooming)和曝光控制功能; (5)高灵敏度:峰值(800nm)响应率为错误!未找到引用源。;饱和曝光量达到错误!未找到引用源。。 (6)埋沟道器件 ,动态范围宽 ,最大可达23600:1。 2. CCD输出信号的预处理 CCD的输出信号由于是负极性的离散模拟信号 ,并且混杂有幅度较大的复位脉冲干扰 ,为了获得高质量的脉动光谱信号 ,必须对CCD输出信号进行适当的预处理 ,才能通过A/D 转换 ,进行进一步的处理。CCD输出信号的预处理包括前置放大、直流箝位、相关双采样、低通滤波和放大几部分 ,下面分别来进行介绍。 2.1 CCD输出信号的前置放大电路 CCD 器件是低功耗器件 ,其输出的视频信号电流非常小 ,也就是说 ,CCD的输出信号不足以驱动后面的视频信号处理电路。因此在CCD输出级要加上一级电流放大电路 ,以提高带负载能力。这部分电路在电路布局上 ,应尽量靠近CCD芯片的输出端 ,以减少传输延迟和信号变形[3]。 本设计中IL-C6-2048C 的输出信号放大电路采用 的是射极跟随方式 ,因为 射极跟随器有高的输入电 阻和低的输出电阻 ,能隔 离前后级电路的相互影响 , 起缓冲作用 ,同时有较大 的电流放大倍数 ,所以可 用作视频信号处理的输入 级,放大器件采用 图2 IL-C6-2048C前置放大电路 MMBT3904晶体管 ,它是低 噪声的器件 ,电流放大倍数(hFE=100)线性好 ,电路实现如图2所示。
基于LabVIEW的脉搏信号检测与分析系统 作者:吉林医药学院杨风健 应用领域:自动化测量 挑战:根据人体阻抗特性,通过拾取阻抗变化测量人体脉搏信号。利用LabVIEW强大数字信号处理功能还原脉搏波形,并对波形的特征信息进行提取及存储。采集足够的数据后,主要运用该语言的数学程序库以及数值分析计算功能进行回归分析,建立相关数学模型,揭示脉搏信号与心血管类疾病的联系。 应用方案:使用NI公司的LabVIEW 8.5作为软件开发平台,结合自行设计的脉搏信号采集装置,开发了一个具有信号分析、处理、显示以及对数据进行回归分析等功能的脉搏信号测量系统。 使用的产品:LabVIEW8.5学生版 介绍 在世界范围内,心血管类疾病患者与日俱增,已成为人类健康的头号
杀手。美国心脏协会报告称,每年大约有240万美国人死于心血管疾病,其中尤以高血压患者所占比率最高,现象最为普遍。中国卫生部公布中国心血管疾病患者已超过1.5亿,心血管病是目前中国人群最主要的死因。因此预防此类疾病的产生显得尤为重要。 人体脉搏系统是心血管系统的重要组成部分,从脉搏波中提取人体的生理和病理信息作为临床诊断和治疗的依据,受到中外医学界的重视,脉搏波所呈现出的形态、强度、速率、节律等方面的综合信息,在很大程度上反映出人体心血管系统中的许多生理病理的血流特征。中医的诊脉理论认为脉搏波的传播与心血管系统的血液运动、血管壁运动规律有着密切的联系。 正文: 脉搏信号形成机理 血液在心血管组成的循环系统中按照一定的方向周而复始的流动,称为血液循环,其动力来源与心脏,心脏通过做有秩序的收缩和舒张活动,使血液源源不断地从心脏射入动脉,心脏每收缩一次,动脉内的压力就发生一次周期性的波动,这种周期性的压力变化引起动脉血管发生波动,称为脉搏。脉搏可以沿着动脉管壁向外周血管传播,这种空间上传播的波动称为脉搏波。
微弱信号检测装置 四川理工学院刘鹏飞、梁天德、曾学明
摘要: 本设计以TI的Launch Pad为核心板,采用锁相放大技术设计并制作了一套微弱信号检测装置,用以检测在强噪声背景下已知频率微弱正弦波信号的幅度值,并在液晶屏上数字显示出所测信号相应的幅度值。实验结果显示其抗干扰能力强,测量精度高。 关键词:强噪声;微弱信号;锁相放大;Launch Pad
Abstract: This design is based on the Launch Pad of TI core board, using a lock-in amplifier technique designed and produced a weak signal detection device, to measure the known frequency sine wave signal amplitude values of the weak in the high noise background, and shows the measured signal amplitude of the corresponding value in the liquid crystal screen. Test results showed that it has high accuracy and strong anti-jamming capability. Keywords: weak signal detection; lock-in-amplifier; Launch Pad
基于LabVIEW的心音信号检测系统设计 心音信号是人体最重要的生理信号之一,含有关于心脏各个部分如心房、心室、大血管、心血管及各个瓣膜功能状态的大量病理信息,是心脏及大血管机械运动状况的反映,具有非线性、非平稳的特点[1-2]。心音来自于人体内部,不容易被复制或模仿,同时还具有独特性,个体的不同,心音信号的表现形式也不相同。对其进行检测分析,可以达到对身份进行识别和验证的目的[3]。此外,通过听取心音,也可以获得用以判断心脏疾病的相关信息[4]。 本文设计、实现一套心音信号采集与分析系统,并研究利用心音进行被测试者的身份识别。因为传统的密码、口令等验证方法存在容易被忘记或破解的缺陷,而利用人体生物特征进行身份识别具有独特的优势,如指纹、虹膜、手形和面部特征等识别技术已经较为成熟,相关产品已经进入市场。但是利用人体生理信号,如心音、脉搏等,进行身份识别的研究才刚刚兴起,有着很大的研究价值和发展空间。随着计算机技术的迅速发展,基于单片机、DSP 等核心控制器采集心音信号,利用PC 机进行定量分析,已成为心音检测系统的研究趋势[5-6]。因此,本系统利用STC12C5A 单片机采集HKY-06B 型PVDF 薄膜式心音传感器输出的心音信号,并通过RS232 总线发送到上位机,实现了检测终端与上位机之间的数据通信,同时在上位机采用虚拟仪器软件LabVIEW 设计 开发了一套集数据管理、采集和分析于一体的虚拟心音检测系统。 1 系统设计 系统的硬件结构框图如图1 所示,包括以下几个部分:(1)心音传感器模块。能将心脏搏动信号转化为低阻抗音频信号;(2)信号预处理模块。负责对微弱的 心音信号进行前置放大、低通滤波、高通滤波和功率放大;(3)单片机模块。负 责将预处理后的心音信号进行A/D 采样以及通过键盘执行数据存储、液晶显示
(此文档为word格式,下载后您可任意编辑修改!) 信号检测综合训练 说明书 题目:振动信号检测系统设计 学院:电气工程与信息工程学院 班级:电子(2)班 姓名: 钱鹏鹏 指导老师:缑新科 2014.12.07
摘要 机械在运动时,由于旋转体的不平衡、负载的不均匀、结构刚度的各向异性、间隙、润滑不良、支撑松动等因素,总是伴随着各种振动。机械振动在大多情况下是有害的,振动往往会降低机器性能,破坏其正常工作,缩短使用寿命,甚至导致事故。机械振动还伴随着同频率的噪声,恶化环境,危害健康。另一方面,振动也被利用来完成有用工作,如运输、夯实、清洗、粉碎、脱水等。这时必须正确选择振动参数,充分发挥振动机械的性能。在现代企业管理制度中,除了对各种机械设备提出低振动和低噪声要求外,还需随时对机器的运行状况进行监测、分析、诊断,对工作环境进行控制。为了提高机械结构的抗振性能,有必要进行机械机构振动分析和振动设计,这些都离不开振动测试。 本文在此基础上设计了一种专用的振动信号检测系统,具有功耗低、体积小、精度高等优点。 信号检测的内容要求: 通过MCS-51系列单片机设计振动信号检测系统。要求如下: 1 振动信号的特点,选择合适的传感器,并设计相应的检测电路; 2 将设计完成的检测电路,通过软件防真验证; 3 主要设计指标:可测最大加速度:-5m/s~+5m/s;可测最大速度:-0.16m/s~+0.16m/s;可测最大位移:-5mm~+5mm;通频带:0.05Hz~35Hz;转换精度:8bit;采样频率:128Hz 4 利用LCD显示振动信号,有必要的键盘控制。 总体设计方案介绍: