基于空间矢量PWM算法的全数字化调速系统
A Fully Digitalized AC Speed Regulation System
Based on Space Vector PWM Control Algorithem
华中理工大学 詹长江 陈 坚 康 勇 段善旭 (武汉 430074)
摘要:提出一种基于空间矢量PWM算法的全数字化交流调速系统。该系统采用双80C196K C单片机控制结构,双机之间数据并行通讯由双口RAM来完成。此外,还提出了一种新颖的定子电流检测方法,该方法基于空间矢量P WM算法,在逆变器零开关矢量作用时间内进行电流采样,采样值波动性小。实验结果表明该系统具有优良的性能。
Abstract:A fully dig italized A C speed regulation system based on space vector PWM control algorit hm is descr ibed in detail.T he control structure composed by double80C196K C chips is adopted.T he par allel commu-nicatio n can be fulfilled with the dua-l po rt-RAM.F uthermore,a new method for testing the stator current based on space vector PWM algor ithm i s proposed.T he good performance of the system is verified by ex per-i mental r esults.
叙词:调速系统 脉宽调制 数字化/空间矢量
Keywords:speed regulation system;PWM;digitalization/space vector
1 引 言
近年来,采用PWM技术的交流变频调速系统逐渐应用于工业领域中[1]。就PWM而言,本质在于优化开关函数,使得逆变器按一定规律输出电压或电流。德国学者H.W.Vander Broek等提出的基于电压空间矢量控制,不仅使得电机转矩脉动降低、电流波形畸变减小,而且与常规SPWM技术相比直流电压利用率亦有很大提高[3]。
由于交流电机本身具有非线性和强耦合性,故其控制方式复杂,用常规的模拟和数字电路难以完成复杂的控制功能,而且系统实时性的要求往往使得用一个单片机很难达到较好的控制效果[5]。而采用双单片机控制结构,既兼顾了成本方面的要求,又得以实现如矢量控制一类复杂的控制方式[6、7、8]。
交流调速系统数字化控制的另一个关键是定子电流的有效、快速、可靠的检测。通常的采样办法的最大缺点在于易受逆变器开关噪声的影响,这样采样值易受干扰而偏离原值,且波动性很大。
本文提出的基于电压空间矢量PWM算法的双80C196KC单片机控制的交流调速系统,双机之间的通讯由双口RAM芯片IDT7130硬件实现,既加快了数据传送率,又提高了系统的可靠性。另外,文中介绍的基于电压空间矢量PWM算法的定子电流检测方式可在逆变器零开关矢量作用时间内完成定子电流的检测和采样,理论上避免了开关器件开通和关断引起的开关噪声,这样采样值波动性小,增加了系统动态响应性能。
2 电压空间矢量PWM算法
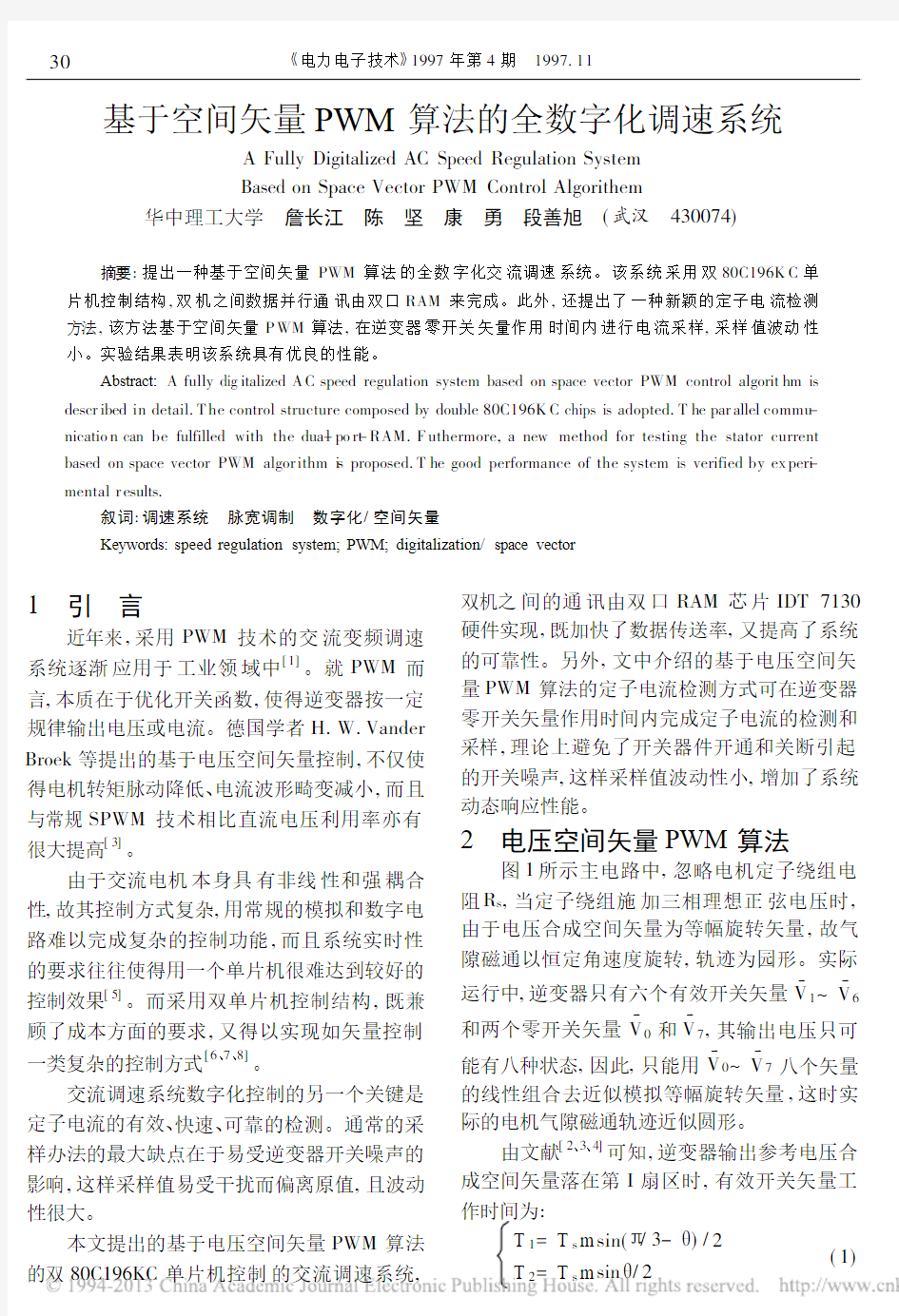
图1所示主电路中,忽略电机定子绕组电阻R s,当定子绕组施加三相理想正弦电压时,由于电压合成空间矢量为等幅旋转矢量,故气隙磁通以恒定角速度旋转,轨迹为园形。实际运行中,逆变器只有六个有效开关矢量V 1~V 6和两个零开关矢量V
和V
7
,其输出电压只可能有八种状态,因此,只能用V
0~V
7八个矢量的线性组合去近似模拟等幅旋转矢量,这时实际的电机气隙磁通轨迹近似圆形。
由文献[2、3、4]可知,逆变器输出参考电压合成空间矢量落在第I扇区时,有效开关矢量工
/3- )/2
sin /2
(1)
式中 m 调制系数
[0, /3]
可以证明,零矢量的作用时间处理方式不同会造成逆变器输出电压的三相相电压瞬时值有所不同。而对合成矢量相同的三相电压,其相电压瞬时值虽可能有所不同,但其输出的线电压瞬时值却必定相同。
t0=t7=(T s/2-t1-t2)/2(2)时,直流利用率可大大提高[4]。
由式(1)、(2)计算出t0、t1、t2和t7,就可利用80C196KC的H SO通道发出PWM脉冲。
图1 电压空间矢量PWM算法
(a)主电路原理 (b)电压空间矢量合成
(c)在开关周期T s内的PW M脉冲波形
3 控制系统硬件
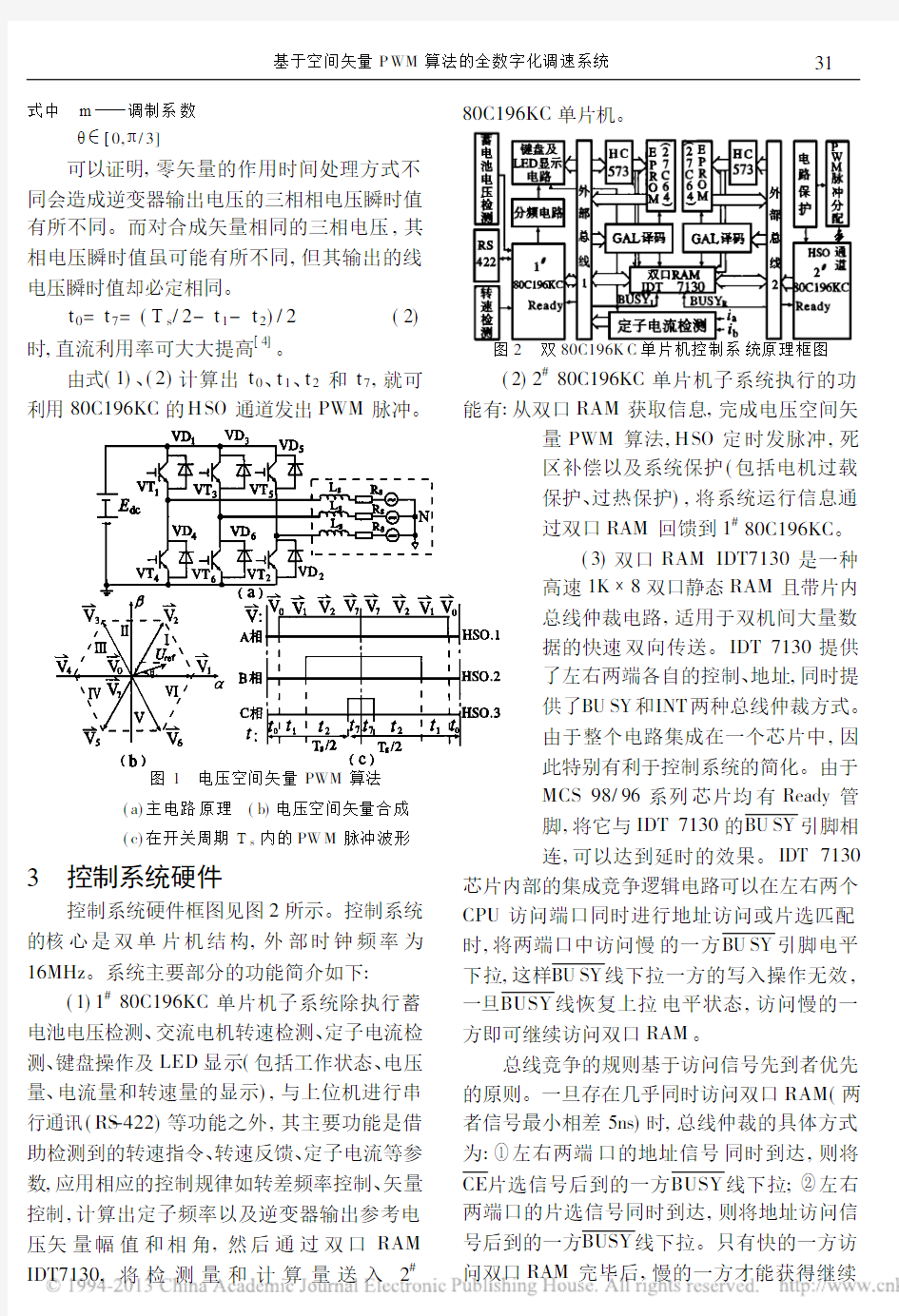
控制系统硬件框图见图2所示。控制系统的核心是双单片机结构,外部时钟频率为16MHz。系统主要部分的功能简介如下:
(1)1#80C196KC单片机子系统除执行蓄电池电压检测、交流电机转速检测、定子电流检测、键盘操作及LED显示(包括工作状态、电压量、电流量和转速量的显示),与上位机进行串行通讯(RS-422)等功能之外,其主要功能是借助检测到的转速指令、转速反馈、定子电流等参数,应用相应的控制规律如转差频率控制、矢量控制,计算出定子频率以及逆变器输出参考电压矢量幅值和相角,然后通过双口RAM IDT7130,将检测量和计算量送入2#80C196KC单片机。
图2 双80C196K C单片机控制系统原理框图
(2)2#80C196KC单片机子系统执行的功能有:从双口RAM获取信息,完成电压空间矢量PWM算法,H SO定时发脉冲,死
区补偿以及系统保护(包括电机过载
保护、过热保护),将系统运行信息通
过双口RAM回馈到1#80C196KC。
(3)双口RAM IDT7130是一种
高速1K 8双口静态RAM且带片内
总线仲裁电路,适用于双机间大量数
据的快速双向传送。IDT7130提供
了左右两端各自的控制、地址,同时提
供了BU SY和INT两种总线仲裁方式。
由于整个电路集成在一个芯片中,因
此特别有利于控制系统的简化。由于
MCS98/96系列芯片均有Ready管
脚,将它与IDT7130的BU SY引脚相
连,可以达到延时的效果。IDT7130芯片内部的集成竞争逻辑电路可以在左右两个CPU访问端口同时进行地址访问或片选匹配时,将两端口中访问慢的一方BU SY引脚电平下拉,这样BU SY线下拉一方的写入操作无效,一旦BUSY线恢复上拉电平状态,访问慢的一方即可继续访问双口RAM。
总线竞争的规则基于访问信号先到者优先的原则。一旦存在几乎同时访问双口RAM(两者信号最小相差5ns)时,总线仲裁的具体方式为: 左右两端口的地址信号同时到达,则将CE片选信号后到的一方BUSY线下拉; 左右两端口的片选信号同时到达,则将地址访问信号后到的一方BUSY线下拉。只有快的一方访问双口RAM完毕后,慢的一方才能获得继续
访问的权利。
4 定子电流检测
由前面分析可知:零矢量作用时,气隙磁通停留在原地不动;当有效矢量作用时,气隙磁通沿着逼近圆的轨迹前进。因此,在零开关矢量作用时间内进行定子电流采样检测有以下三个优点:
(1)电压空间矢量PWM 算法中脉冲发出的起终时刻均是零矢量作用时刻,故其具有信号同步功能。在稳态情况下,若电机定子电压与电流之间的相位关系基本不变,则在零开关矢量作用时刻采样定子电流波形亦是同步的。
(2)在零开关矢量作用时间内,逆变器无开关作用,因而开关噪声对电流采样的影响大大减小了。
(3)如果在零开关矢量作用时间的中间点进行检测,原理上可以认为该点就是该相实际电流值。
利用2#80C196KC 的H SO 通道发出的脉冲得到零开关矢量作用信号,将它送入1#
80C196KC 的EXTINT 触发外中断,进入外中断的服务子程序。该子程序的功能是采样定子
电流并进行预处理。
图3 定子电流检测电路框图
在图3所示的定子电流检测电路中,电流霍尔检测到的电机定子电流信号i a 、i b 经放大
后分别送入A/D 转换电路中,A/D 转换芯片采用带跟踪/保持电路、具有串行输出功能的M AX176。MAX176在启动信号START 和时钟信号CLK 的作用下,将i a 、i b 采样变换成12位数字输出代码脉冲,经光电耦合器隔离后送入串/并转换电路中,变换成并行数据,然后送入1#80C196KC 的外部总线上。1#80C196KC 输出内部时钟信号(8Hz),经过时钟分频电路得到A/D 转换所需的启动信号START 和时
钟信号CLK 。当1#80C196KC 的EXT INT 外
中断触发后进入中断服务子程序,就可将总线上的数据采进CPU 中。
5 实验结果
本文研制的全数字化交流调速系统采用80C 196KC 控制,逆变器功率开关器件采用IGBT (400A/600V ),直流侧电源为船用蓄电池(175V ~250V )。电机参数为:电机型号JPT -13-4-H 、P e =15kW 、U e =110V 、I e =140V 、f e =50Hz 、n e =1450r/min 。实验结果如图4、5所示。
图4 定子频率f =2.5Hz,载波比为96时的实验波形
(a)定子电流i a 的波形
(b)上:A 相上管PWM 脉冲驱动波形
下:零开关矢量作用信号脉冲波形
图5 定子频率f =50Hz,载波比为48时的实验波形
(a)定子电流i a 的波形
(b)上:A 相上管PWM 脉冲驱动波形
下:零开关矢量作用信号脉冲波形
6 结 论
由以上分析和实验结果表明:
(1)用两个80C196KC 单片机加上双口RAM IDT 7130构成的控制系统适用于交流电机的全数字化控制,同时亦可作为多种调速方案的试验平台,为通用变频器的实用化打下了基础。
(2)双口RAM IDT 7130的使用基本上解决了双机间数据的大量快速双向传送,且可靠性高,占用PCB 板面积小,具有很好的性能价
格比。
(3)基于电压空间矢量PWM算法控制的变频调速逆变器具有较高的直流电压利用率,且适合于数字实现。
(4)基于电压空间矢量PWM算法的定子电流检测方法适用于全数字化交流调速系统,采样数据波动性小,增强了系统动态响应性能。
参 考 文 献
1 陈 坚.交流电机数学模型及调速系统.北京:国防工业出版社,1989.
2 Yoshihiro Hur oi,Y uzuru T zunchiro.感应电动机传动用逆变器的PWM改进方式.国际电力电子学会会议论文集,北京:机械工业出版社,1987:311~321
3 H.W.Vander Broeck,H.C.Skudely and G.V.Stranke.Analysis and Realization o f a Pulsew idth M odula-tor Based on Voltag e Space V ectors.IEEE T rans.on IA, 1988,24(1):142~150
4 康 勇.高频大功率SPWM逆变电源的研究[博士论文].华中理工大学,武汉,1994.
5 张 宇等.利用空间矢量法实现交流电机的数字化变频调速系统.CAV D 95,1995:189~195
6 冯江华.通用变频器的双单片机的控制系统. CA VD 95,1995:315~322
7 钟彦儒等.一种双微机矢量控制系统的实现. CA VD 95,1995:216~221
8 刘立志等.80C196-8098双单片机控制的全数字化矢量控制交流调速系统.CAV D 95,1995:243~ 249
收稿日期:1996-09-18
作者简介
詹长江:男,1970年10月生,博士生。研究方向为电力电子技术及电气传动自动化。
陈 坚:男,1935年8月生,教授,博士生导师。研究方向为电力电子技术及电气传动自动化。
康 勇:男,1965年10月生,博士,副教授。研究方向为电力电子技术及电气传动自动化。
段善旭:男,1970年生,博士生。现从事电力电子技术方面的教学与科研。
(上接第29页)
4.2 结 论
通过小功率晶闸管PWM变频调速系统的试验表明,采用公共换流方式的SCR逆变器输出电流接近正弦波,谐波很小。它与由GTR组成的逆变器的变频调速系统相比,成本差距不大。但随着功率的提高,由SCR组成的变频调速系统的成本相对降低了。尤其当前国内生产大功率可关断器件的能力还很低,而功率元件立足于国内,这对发展晶闸管的SPWM变频调速系统具有一定意义。
参 考 文 献
1 大西德生等.公共换流方式SCR电力变换装置.日本1995年电气学会产业应用部门全国大会论文集:101~102
收到初稿日期:1996-10-07
收到定稿日期:1996-12-25
作者简介
张 淼:男,1968年8月生,讲师。主要从事交流变频调速方面的研究。
冯垛生:男,1938年5月生,教授。主要从事交流变频调速理论及应用方面的研究。谢俊杰:男,1945年1月生,副教授。主要从事电力电子应用方面的研究。
中国计量学院 课程设计设计报告书 题目:PWM控制的直流电 动机调速系统设计 二级学院现代科技学院 专业电气工程及自动化 班级电气062 姓名***** 学号********** 同组同学姓名****** ******* 同组同学学*********** ********* 2009年12月23日
设计题目:PWM控制的直流电动机调速系统设计 1、前言 近年来,随着科技的进步,电力电子技术得到了迅速的发展,直流电机得到了越来越广泛的应用。直流它具有优良的调速特性,调速平滑、方便,调速范围广; 过载能力大,能承受频繁的冲击负载,可实现频繁的无级快速起动、制动和反转;需要能满足生产过程自动化系统各种不同的特殊运行要求,从而对直流电机的调速提出了较高的要求,改变电枢回路电阻调速,改变电枢电压调速等技术已远远不能满足要求,这时通过PWM方式控制直流电机调速的方法应运而生。 采用传统的调速系统主要有以下缺陷:模拟电路容易随时间漂移,会产生一些不必要的热损耗,以及对噪声敏感等。而在用了PWM技术后,避免了以上的缺陷,实现了用数字方式来控制模拟信号,可以大幅度降低成本和功耗。另外,由于PWM调速系统的开关频率较高,仅靠电枢电感的滤波作用就可获得平稳的直流电流,低速特性好;同样,由于开关频率高,快速响应特性好,动态抗干扰能力强可以获得很宽的频带;开关器件只工作在开关状态,主电路损耗小,装置效率高。PWM具有很强的抗噪性,且有节约空间、比较经济等特点。 2、设计要求及组内分工 2.1设计要求 (1)根据电机与拖动实验室提供的直流电动机,设计基于PWM的电动机 调速方案。 (2)选用合适的功率器件,设计电动机的驱动电路。 (3)设计PWM波形发生电路,使能通过按键对电机转速进行调节,要求至少有两个速度控制按键,其中一个为加速键(每按一次,使电机转速增 加);另一个为减速键,功能与加速键相反。 (4)撰写课程设计报告。 2.2组内分工 (1)负责直流电动机调速控制硬件设计及电路焊接:主要由胡佳春和叶秋 平完成
电压空间矢量
电气空间矢量PWM 自动1202 熊立波 20121799 什么是电气空间矢量PWM ,以及怎样用于变频器V/F 控制? 空间矢量的定义:交流电动机绕组的电压、电流、磁链等物理量都是随时间变化的,分析时常用时间向量来表示,但如果考虑到他们所在的空间位置,也可以定义为空间矢量。 在图中,A ,B ,C 分别表示在空间静止的电动机定子三相绕组的轴线,它们在空间互差 120,三相定子正弦波相电压0A U 、0B U 、 C U 分别加在三相绕组上。可以定义三个定子 电压空间矢量0A u 、0B u 、0C u ,使它们的方向始终处于各相绕组的轴线上,而大小则随时 间按正弦规律波动,时间相位互相错开的角度也是0 120。 0s A B C u u u u =++ 当定子相电压为三相平衡正弦电压时,三相合成矢量 0s A B C u u u u =++ 1 1 2111224[cos()cos()cos()]333 23 j j m m m j t j t m s t t t U U e U e U e U e γγππωωωωω= +-+-== 合成空间矢量表示的定子电压方程式 s s s s d dt u i R ψ =+ 忽略定子电阻压降,定子合成电压与合成磁链空间矢量的近似关系为
s d dt ψ 或 s s dt u ψ ≈? 三相逆变电路每相上下桥臂开关动作相反,将上桥臂导通而下桥臂关断的状态记为1,反之记为0,则三相逆变电路共对应8种输出电压状态。 PWM 逆变器共有8种工作状态 当 (A S B S C S )=(1 0 0) (A u B u C u )=(2d U 2d U - 2d U -) 242331 22(1)(1) 32 32j j j j d d U U u e e e e ππ γγ = --=-- 224242 [(1cos cos )(sin sin )]323333 3d d j U U ππππ = ---+= 当 (A S B S C S )=(1 1 0) (A u B u C u )=(2d U 2d U 2d U - ) 2423 322(1)(1) 322j j j j d d U U u e e e e ππ γγ=+-=+- 22424[(1cos cos )(sin sin )]323333d j U ππππ = +-+- 322(13)323j d d j U U e π= += 依次类推,可得8个基本空间矢量。 6个有效工作矢量 1 u ~6 u
摘要:提出一个基于PWM控制的直流电机控制系统,从硬件电路和软件设计两方面进行系统设计,介绍了调速系统的整体设计思路、硬件电路和控制算法。下位机采用MPC82G516实现硬件PWM的输出,从而控制电机的电枢电压,并显示电机调速结果。上位机采用LABVIEW软件,实现实时跟踪与显示。最后对控制系统进行实验,并对数据进行分析,结果表明该系统调速时间短,稳定性能好,具有较好的控制效果。 随着计算机控制技术的发展,微处理器已经广泛使用于直流传动系统,实现了全数字化控制。电机采用微处理器控制的电压、电流、转矩、转速、转角等,实现全数字直流调速,控制精度、可靠性、稳定性、电机的性能得到提高。目前,PWM 调速成为电机调速的新方式,并凭借开关频率高、低速运行稳定、动态 [1-6][5-6]性能优良、效率高等优点,在电机调速中被普遍运用。但很多文献提到的 PWM 信号,多采用软件 PWM调速,即通过单片机的中断实现,缺点是占系统资源,易受系统中断影响和干扰,造成系统不稳定。本文将针对这一点,设计一种基于硬件 PWM 控制,调速时间更短的电机调速系统,并具有较好的稳定性能。 一、电机控制系统的整体设计 1.1 系统整体设计原理图 系统整体设计如图1所示,主要原理框图包括:LCD显示、按盘输入、测速模块、PWM调速模块四部分。电路原理图如图2所示: 图 1
图2 1.2 PWM信号 PWM信号的产生采用硬件PWM信号,即不采用中断实现PWM信号,而是利用单片机MPC82G516的PCA模式,PCA设置成PWM模式直接产生PWM信号。频率取决于PCA定时器的时钟源,占空比取决于模块捕获寄存器CCAPNL与扩展的第9位ECAPNL的值。由于使用9位比较,输出占空比可以真正实现0%到100%可调,占空比计算公式为: 占空比=1-{ ECAPnH,[CCAPnH]}/256 在电源电压 Ud 不变的情况下,电枢端电压的平均值取决于占空比η 的大小。通过改变η 的值可以改变电枢端电压的平均值,从而达到调速的目的。 1.3 测速模块 测速模块采用自带霍尔传感器并具有整形功能的直流电机调速板 J1,该模块能实现电机正反转、测速、调速功能,并自带整形芯片,调试效果较好。通过霍尔传感器把测速脉冲信号送单片机 P3.2,由单片机 P1.0送到测速模块第 5 脚,控制电机正反转。PWM 信号由 P1.2 送到测速模块第 3 脚,实现电机的调速。 1.4 I/O接口电路 输入模块采用 4 个按键 S1、S2、S3、S4,接在单片机 P1.4、P1.5、P1.6、P1.7,分别实现启动、加速、扩展功能、减速功能。电机正反转控制由 P1.0 送到测速模块第 1 脚。输出显示模块采用 LCD1602,是一种内置 8192 个 16*16
新型无扇区空间矢量脉宽调制算法的研究 李丹 周波 黄佳佳 方斯琛 (南京航空航天大学航空电源航空科技重点实验室, 南京, 210016) 摘要:传统的空间矢量脉宽调制(SVPWM )算法需要进行扇区判断,编程实现复杂。本文提出了一种基于新坐标系下的电压空间矢量脉宽调制的新算法。该算法无需扇区判断即可直接求解三相桥臂开关的占空比;实现了对开关信号的直接求解。与传统调制方法相比,大大简化了数字实现,提高了实时性。仿真及实验结果表明了该方法的正确性和可行性。 关键词:空间矢量脉宽调制;三相逆变器;坐标系;新型调制算法; 1 引 言 在控制电机的三相逆变器中,空间矢量脉宽调制(SVPWM )和正弦脉宽调制(SPWM )为两种常用调制方式。与SPWM 近似正弦的输出电压不同,SVPWM 的调制方法将逆变器和电机视为一个整体,着眼于使电机实现幅值恒定的旋转磁场。与SPWM 相比,功率器件的开关次数可以减少1/3,直流电压利用率可提高15%,能获得较好的谐波抑制效果,具有快速的响应等特点;并且,SVPWM 调制方式更适合数字实现。 SVPWM 的一系列优点使其得到了广泛应用,但缺点是数字控制复杂,因此许多文献致力于寻找SVPWM 的简化算法[1]~[3]。文献[1] 改变了扇区划分方式,减少了一定的运算步骤;文献[2]使用新的扇区标号判别方法减少了三角运算,提高了运算速度。 以上这些改进一定程度上简化了SVPWM 的数字实现,但由于简化都是针对传统调制算法的具体运算步骤进行的,因此改进有限。本文通过对SVPWM 的本质分析,提出了一种无扇区的全新实现方法。该方法改变了SVPWM 调制算法的实现思想,将整个向量空间视为整体,省略扇区的概念来达到算法的简化,与传统调制方法相比减小了编程难度,提高了运算实时性,有利于数字实现。 2 传统电压空间矢量脉宽调制方法 三相全桥逆变器共八种开关模式,分别对应八个基本电压空间矢量U 0~U 7,如图1所示。两个零矢量U 0、U 7幅值为0,位于原点。其余六个非零矢量幅值相同,相邻矢量间隔60o 。根据非零矢量所在位置将空间划分为六个扇区。空间矢量脉宽调制就是利用U 0~U 7的不同组合,组成幅值相同、相位不同的参考电压矢量U ref ,从而使矢量轨迹尽可能逼进基准圆, U 456Ⅴ T 1/T pwm *U 1 U 1O
变频器电压空间矢量脉宽调制(SVPWM)控制时间:2011-10-07 来源:未知编辑:电气自动化技术网点击:1071次字体设置: 大中小 经典的正弦脉宽调制(spwm)控制着眼于使变压变频器的输出电压尽量接近正弦波,并未顾及输出电流的波形如何,更未考虑电动机中产生的旋转磁场。然而交流电动机需要输入三相正弦波的最终目的是在电动机气隙形成圆形的旋转磁场,从而产生恒定的电磁转矩。如果对准这一目标,把逆变器和交流电动机视为一体,按照跟踪圆形旋转磁场来控制逆变器的工作,其效果应该更好。这种控制方法称作“磁链跟踪控制”,下面的讨论将表明,磁链轨迹是交替使用不同的电压空间矢量得到的,所以又称“电压空间矢量pwm(space vector pwm,简称svpwm)控制”。 4.1 电压空间矢量 随时间按正弦规律变化的物理量可在复平面上用时间相量表示,而在空间呈正弦分布的物理量也可在复平面上表示为一个空间矢量。图4-1a)绘出了异步电动机定子三相绕组接线图,图中箭头所指为相应物理量的给定正方向。在空间呈正弦分布的三相定子绕组磁动势可用空间矢量f a、f b、f c表示,见图4-1b),它们分别座落在代表三相定子绕组轴线空间位置的a、b、c轴上,而三相绕组合成磁动势的空间矢量为图中的f s。 f s=f a+f b+f c(4-1) 式中,f a、f b、f c的模均在各自的绕组轴线上按正弦规律作脉动变化,时间相位分别差2π/3。它们的合成磁动势空间矢量f s则绕定子参考坐标系的原点o以同步角频率旋转。当三相定子绕组电流为对称的三相正弦电流时,fs的幅值为常数,是各相磁动势幅值的3/2倍,矢量顶端的运动轨迹是一个圆,即通称的圆形旋转磁场。
电气空间矢量PWM 自动1202 熊立波 20121799 什么是电气空间矢量PWM ,以及怎样用于变频器V/F 控制? 空间矢量的定义:交流电动机绕组的电压、电流、磁链等物理量都是随时间变化的,分析时常用时间向量来表示,但如果考虑到他们所在的空间位置,也可以定义为空间矢量。 在图中,A ,B ,C 分别表示在空间静止的电动机定子三 相绕组的轴线,它们在空间互差0 120 ,三相定子正弦 波相电压0A U 、0B U 、0C U 分别加在三相绕组上。可以定义三个定子电压空间矢量 A u 、 B u 、 0C u ,使 它们的方向始终处于各相绕组的轴线上,而大小则随时间按正弦规律波动,时间相位互相错开的角度也是 120。 0s A B C u u u u =++ 当定子相电压为三相平衡正弦电压时,三相合成矢量 0s A B C u u u u =++ 112111224[cos()cos()cos()]33323 j j m m m j t j t m s t t t U U e U e U e U e γγππωωωωω=+-+-= = 合成空间矢量表示的定子电压方程式 s s s s d dt u i R ψ =+ 忽略定子电阻压降,定子合成电压与合成磁链空间矢量的近似关系为 s d dt ψ 或 s s dt u ψ ≈? 三相逆变电路每相上下桥臂开关动作相反,将上桥臂导通而下桥臂关断的状态记为1,反之 记为0,则三相逆变电路共对应8种输出电压状态。 PWM 逆变器共有8种工作状态 当 (A S B S C S )=(1 0 0) (A u B u C u )=(2d U 2d U - 2d U -)
文章编号:1005—7277(2005)01—0011—03 V ol.27,N o.12005,27(1):11~13 电气传动自动化 E L ECTRIC D RIVE AUTOMATI O N 2005年第27卷第1期第11页 空间矢量脉宽调制仿真及其谐波分析 康现伟,于克训,刘志华 (华中科技大学电气与电子工程学院,湖北武汉430074) 摘要:在深入分析空间矢量脉宽调制机理的基础上,通过SIMU LINK 给出了其仿真波形,重点对SVPWM 的仿真结果进行了谐波分析,得到了SVPWM 谐波分布的主要特点及影响其谐波分布的几个主要因素,为更有效消除SVPWM 谐波污染提供了理论基础和指导。关键词:空间矢量脉宽调制;谐波;仿真中图分类号:T M921.52 文献标识码:A Simulation and harmonic anal y sis of SVPWM K ANG Xian-wei ,Y U K e-xun ,LIU Zhi-hua (Huazhon g Univ er sit y o f Science and T echnolo gy ,Wuhan 430074,China ) Abstract :Based on the anal y sis of the characteristics of s p ace vector p ulse w idth m odulation (SVPWM ),a series of sim 2ulation w aveforms are illustrated b y the use of S imulink.T he foundational features of the harm onic distributions of SVPWM and the dom inant factors affectin g the distributions are obtained throu g h the anal y sis on the harm onics of the w aveforms ,which p rov ides us theoretical foundation to elim inate the harm onic p ollution.K e y w ords :SVPWM;harm onic ;simulation 1引言 空间矢量脉宽调制(SVPWM )具有线性调制范围宽,直流电压利用率高,易于微处理器实现等优点,它目前被广泛应用于变频器、UPS 、无功补偿器、有源滤波器、储能系统电力变换器等领域。当控制精度要求较高时,必须考虑其谐波问题。 本文首先阐述了空间矢量调制(SVPWM )的基本原理,然后给出了仿真波形,针对空间矢量调制中出现的谐波问题,文章进行了较为详细的分析和论述,得到了影响SVPWM 谐波分布的几个主要因素,从而为其在实际应用中消除谐波污染提供了可靠的理论依据。 2电压空间矢量脉宽调制(SVPWM )原理 对于理想三相正弦系统,电压空间矢量的定义为: V =2/3(V a +V b e j 2π/3+V c e j 4π/3) (1) 对于三相电压源型逆变桥的6个开关,如图1 所示。假设“1”代表上桥臂导通,“0”代表下桥臂导 通,则一共有8种开关模式,分别为V 0(000),V 1(100),V 2(110),V 3(010),V 4(011),V 5(001),V 6(101), V 7(111)。由变换式(1)可得,这8种开关模式在复 平面上分别产生8种电压矢量,其中V 1~V 66个开关模式产生输出电压,而V 0、V 72个开关模式不产生输出电压,称为零矢量。这8个电压矢量将复平 面分为6个区域,如图2所示,按照平行四边形法则,利用这8个空间矢量可以合成在六变形区域内的任何输出电压矢量 。
电压空间矢量脉宽调制技术的原理与特征分 析 收藏此信息打印该信息添加:袁登科陶生桂龚熙国来源:未知 1 引言 自从1964年德国a.schonung等学者率先提出了脉宽调制变频的思想—把通信系统的脉宽调制(pwm)技术应用于交流电气传动以来,至今已经出现了几十种不同的脉宽调制技术[1] [2]。脉宽调制技术控制的逆变器可以输出比传统方波逆变器性能好得多的电压波形,但它们各自的着眼点不同、各次谐波分量不同、引起电机的谐波损耗不同、对中间回路电压的利用率不同。其中电压空间矢量pwm技术中间直流回路电压的利用率较高、输出波形含有较少的谐波分量、引起的电流、转矩的脉动也较小,同时也非常有利于数字化实现,因此是非常有前途并且应用也非常广泛的一种pwm技术。本文对该脉宽调制技术的数学基础、原理、几何特征以及不同的调制区域进行了详细的分析,有助于加深对该技术的理解和对该技术的改进。 2 电压空间矢量的概念 电压空间矢量的定义式为: 由于公式中出现了虚数单位j,所以上式电压矢量是用复数表示的。可以求得其实部与虚部分别为:
根据其对应关系可以求出,采用电压矢量实部与虚部表示的三相电压为: 上面两式(2)与(3)也是在坐标变换中经常见到的3/2与2/3变换。当使用电压矢量来表示三相电压时,则有: 式中的re{z}表示取复数z的实部。 一般情况下,三相电压均是时间的变量。首先考虑某一时刻t=t0,那么此时电压矢量在空间内就是具有某一确定方向和长度的有向线段。在不同时刻,它就对应着不同方向或长度的有向线段。假定三相电压为正弦交流电,即 此时的电压空间矢量为: 可见此时的电压矢量的幅值是恒定的,与相电压峰值相等,而其幅角随时间线性增长,且速度为相电压电角频率。这即是说电压矢量端点的轨迹在空间内是一个圆。
PWM ft流脉宽调速系统设计 1 PWM调速系统的主要问题 1.1什么是PWM 脉冲宽度调制(PWM),是英文“ Pulse Width Modulation ”的缩写,简称脉 宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。 脉冲宽度调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管栅 极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变, 这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数 字输出来对模拟电路进行控制的一种非常有效的技术。 PWM控制技术以其控制简单,灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式,也是人们研究的热点?由于当今科学技术的发展已经没有了 学科之间的界限,结合现代控制理论思想或实现无谐振软开关技术将会成为PWM 控制技术发展的主要方向之一。 1.2 PWM的优越性 自从全控型电力电子器件问世以后,就出现了采用脉冲宽度调制的高频开关 控制方式,形成了脉宽调制变换器一直流电动机调速系统,简称直流脉宽调速系 统,或直流PWM S速系统。与V-M系统相比,PWM S统在很多方面有较大的优越性:1)主电路线路简单,需用的功率器件少。 2)开怪频率咼,电流容易连续,谐波少,电机损耗及发热都较小。 3)低速性能好,稳速精度高,调速围宽,可达 1 : 10000左右。 4)若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗扰能力强。 5)功率开关器件工作在开关状态,导通损耗小,当开关频率适当的时候,开关损耗也不大,因而装置效率较高 6)直流电源采用不控整流时,电网功率因数比相控整流器高。 由于有上述优点,直流PWM S速系统的应用日益广泛,特别是在中、小容量 的高动态性能系统中,已经完全取代了V-M系统。 1.3 PWM变换器的工作状态和电压、电流波形 脉宽调制变换器的作用是:用脉冲宽度调制的方法,把恒定的直流电源电压
采用空间矢量脉宽调制(SVPWM )的开环 VVVF 调速系统的综合实训 一、实验目的 1、理解电压空间矢量脉宽调制(SVPWM )控制的基本原理。 2、熟悉MCKV 电机控制系统的CPU 模块、IPM 模块和机组各部分硬件模块,并确认工作正常。 3、了解SVPWM 变频器运行参数和特性。 二、实验内容: 1、熟悉CCS 编程环境,并在CCS 下编译、下载、运行DSP 软件工程。 2、观察并记录定子磁链周期和频率,并分析他们之间的关系。 3、观测并记录启动时电机定子电流和电机速度波形)(t f i v =与)(t f n =; 三、实验预习要求 1、阅读并掌握三相交流异步电机VVVF 调速系统工作原理。 2、了解电压空间矢量脉宽调制(SVPWM )控制的基本原理。 3、阅读本次实验指导书和实验程序,写好实验预习报告。 4、在MATLAB/Simulinlk 环境中搭好仿真模型,结合本程序LEVEL1功能框图,完成电流速度双闭环系统交流异步电机矢量控制仿真。 四、实验原理 当用三相平衡的正弦电压向交流电动机供电时,电动机的定子磁链空间矢量幅值恒定,并以恒速旋转,磁链矢量的运动轨迹形成圆形的空间旋转矢量(磁链圆)。SVPWM 就是着眼于使形成的磁链轨迹跟踪由理想三相平衡正弦波电压源供电时所形成的基准磁链圆,使逆变电路能向交流电动机提供可变频电源,实现交流电动机的变频调速。 现在以实验系统中用的电压源型逆变器为例说明SVPWM 的工作原理。三相逆变器由直流电源和6个开关元件( MOSFET) 组成。图1是电压源型逆变器的示意图。 图1 电压源型逆变器示意图
对于每个桥臂而言,它的上下开关元件不能同时打开,否则会因短路而烧毁元器件。其中A 、B 、C 代表3 个桥臂的开关状态,当上桥臂开关元件为开而下桥臂开关元件为关时定义其状态为1 ,当下桥臂开关元件为开而上桥臂开关元件为关时定义其状态为0。这样A 、 B 、 C 有000 、001 、010 、011 、100 、101 、110 、111共 8种状态。逆变器每种开关状态对应不同的电压矢量,根据相位角不同分别命名为U 0(000)、U 1(100)、U 2(110)、U 3(010)、U 4(011)、U 5(001)、U 6(101)、U 7(111)如图2所示。 图2 基本电压空间矢量 其中U 0(000)和U 7(111)称为零矢量,位于坐标的原点,其他的称为非零矢量,它们幅值相等,相邻的矢量之间相隔60°。如果按照一定顺序选择这六个非零矢量的电压空间矢量进行输出,会形成正六边形的定子磁链,距离要求的圆形磁链还有很大差距,只有选择更多的非零矢量才会使磁链更接近圆形。 SVPWM 的关键在于用8个基本电压空间矢量的不同时间组合来逼近所给定的参考空间电压矢量。在图3中对于给定的输出电压U ,用它所在扇区的一对相邻基本电压x U 和60 x U 来等效。此外当逆变器单独输出零矢量时,电动机的定子磁链矢量是不动的。根据这个特点,可以在载波周期内插入零矢量,调整角频率,从而达到变频目的。 图3 电压空间的线性组合
啊一直以来对SVPWM原理和实现方法困惑颇多,无奈现有资料或是模糊不清,或是错误百出。经查阅众多书籍论文,长期积累总结,去伪存真,总算对其略窥门径。未敢私藏,故公之于众。其中难免有误,请大家指正,谢谢! 此文的讲解是非常清楚,但是还是存在一些错误,本人做了一些修正,为了更好的理解整个推导过程,对部分过程进行分解,并加入加入7段和5段时调制区别。 1 空间电压矢量调制SVPWM 技术 SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。空间电压矢量PWM与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。SVPWM技术与SPWM相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。下面将对该算法进行详细分析阐述。 1.1 SVPWM基本原理 SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。逆变电路如图2-8 示。设直流母线侧电压为Udc,逆变器输出的三相相电压为UA、UB、UC,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。假设Um为相电压有效值,f为电源频率,则有: (2-27) 其中,,则三相电压空间矢量相加的合成空间矢量U(t)就可以表示为:(2-28) 可见U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um为相电压峰值,且以角频率ω=2πf按逆时针方向匀速旋转的空间矢量,而空间矢量U(t)在三相坐标轴(a,b,c)上的投影就是对称的三相正弦量。 图2-8 逆变电路 由于逆变器三相桥臂共有6个开关管,为了研究各相上下桥臂不同开关组合时逆变器输出的空间电压矢量,特定义开关函数Sx ( x = a、b、c) 为: (2-30) (Sa、Sb、Sc)的全部可能组合共有八个,包括6个非零矢量Ul(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)、和两个零矢量 U0(000)、U7(111),下面以其中一种开关组合为例分析,假设Sx ( x=? a、b、c)= (100),此时 (2-30) 求解上述方程可得:Uan=2Ud /3、UbN=-U d/3、UcN=-Ud /3。同理可计算出其它各种组合下的空间电压矢量,列表如下: 表2-1 开关状态与相电压和线电压的对应关系
空间矢量PWM算法的理解 姜淑忠 上海交通大学电气工程系(上海200030) 摘要:继正弦波PWM(SPWM)开关算法之后,空间矢量(Space Vector)PWM (SVPWM)已成为三相或多相逆变器的开关算法。本文以SVPWM的基本原理为基础,计算开关时间,讨论开关向量的选择原则,并用数字信号处理器(DSP)实现SVPWM算法。最后根据电压综合向量,推导相电压有效值与交流输入电压有效值的关系。 关键词:SVPWM,开关向量,开关时间,相电压有效值 Understanding of Space Vector PWM Algorithm S.Z. Jiang Department of Electrical Engineering, Shanghai Jiao Tong University (Shanghai 200030) Abstract: Following the SPWM algorithm, SVPWM algorithm has been adopted in three-phase and multi-phase inverters. Based on the principle of SVPWM, the calculation of switch time, the selection of switch vector and the realization on DSP are presented in this paper. Finally the relation between the rms of phase voltage and the rms of ac source is derived from the complex voltage vector. Keywords: SVPWM, Switch vector, Switch time, RMS of phase voltage 1、前言 无论是一般的变频调速,还是磁场定向控制,当计算出静止直角坐标系中的电压综合向量后,都要采用SVPWM算法获得三相逆变器六个开关器件的开关信号。早期
基于PWM勺电机调速系统 实验目的: 1. 学会并掌握可keil软件的使用; 2. 学会并掌握protues软件的使用; 3. 通过实验巩固单片机相关知识和检验自身动手能力 实验要求: 掌握单片机相关知识,利用调PWm空比的方式来控制直流电机的转速,并且在led 数码管上显示转速。 实验设备和仪器: 单片机最小系统 2. 直流电机 3. 示波器 实验内容: 本次实验设计是由小组五个成员共同完成基于PWM勺电机调速系统并完成实物搭建和撰写实验报告。本次实验小组共提供了两个方案,方案一和方案二,两个方案各自具有优缺点,详细内容会在下面给出。 方案一实验步骤:
1.利用protues画电路图,电路图如图1所示: 图1:方案一电路图 2.根据电路图编写C语言'代码: 代码如下: #include <> sbit PWM=P2A7; sbit CS3=P2A3; sbit CS2=P2A2; sbit CS1=P2A1; sbit CS0=P2A0; sbit key1=P1A。; sbit key2=P1A1; sbit key3=P1A2; sbit key4=P1A3; unsigned char timer1; unsigned char tab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
void Time1Config(); void main(void) ( Time1Config(); while(1) ( if(timer1>100) 验仿真,部分仿真结果如图2图3所示: 图2:仿真结果图(1) 图3:仿真结果图(2) 4. 实物验证结果如图4所示: 图4:方案一实物验证结果 实物验证可以明显感觉到电机转速的变化,由于每个开发板不同,相比仿真程序,对实物验证程序进行了略微的修改,最终能达到要求。
第6章空间矢量脉宽调制技术 例1、CLARK变换的DSP实现 图CLARK变换实现波形图 /*---------------------------------------------------------------------------------------------------------------------------------------- CLARKE变换相关变量定义 ----------------------------------------------------------------------------------------------------------------------------------------*/ typedef struct { float32 As; // 输入:A相定子电流 float32 Bs; // 输入:B相定子电流 float32 Alpha; // 输出:静止坐标系d轴定子电流 float32 Beta; // 输出:静止坐标系q轴定子电流 void (*calc)(); // 计算函数指针 } CLARKE; typedef CLARKE *CLARKE_handle; /*---------------------------------------------------------------------------------------------------------------------------------------- 定义CLARKE变换初始化参数 ----------------------------------------------------------------------------------------------------------------------------------------*/ #define CLARKE_DEFAULTS { 0, \ 0, \ 0, \ 0, \ (void (*)(Uint32))clarke_calc } /*---------------------------------------------------------------------------------------------------------------------------------------- CLARKE变换函数原型CLARKE.C ----------------------------------------------------------------------------------------------------------------------------------------*/ void clarke_calc(CLARKE_handle); #include "dmctype.h"
近年来,电机的空间矢量理论被引入到逆变器及其控制中,形成和发展了空间矢量 PWM(SVPWM)控制思想。其原理就是利用逆变器各桥臂开关控制信号的不同组合,使逆变器输出电压空间矢量的运行轨迹尽可能接近圆形。空间矢量脉宽调制技术,不仅使电机脉动降低,电流波形畸变减小,且与常规正弦脉宽调制(SP-WM)技术相比,直流电压利用率有很大提高,并更易于数字化实现。 1 电压空间矢量调制(SVPWM)算法 SVPWM是以磁链跟踪控制为目标,使逆变器瞬时输出三相脉冲电压合成的空间电压矢量与期望输出三相正弦波电压合成的空间电压矢量相等。对于三相电压型逆变器而言,它有8种工作状态,用矢量表示这8种空间状态,如图1所示。 介绍SVPWM工作原理的相关文献很多,这里不再细述,以下给出算法步骤: (1)判断参考电压矢量Vref所在扇区 引入三个中间变量A,B,C:
则扇区号:S=A+2B+4C。 (2)计算扇区的有效电压空间矢量和零矢量的作用时间Tx,Ty和T0 引入三个中间变量X,Y和Z: 对于不同的扇区,Tx,Ty按表1取值。 饱和判断:Tyout。
计算零电压矢量作用时间:T0=TPWM-Tx-Ty。 (3)开关切换时间分配 先定义空间矢量切换点分别为: 则根据空间矢量所处的扇区不同,晶体管的切换时间Tcm1,Tcm2,Tcm3分别如表2所示。
Simulink仿真环境下可以方便地利用模块和软件编程扩展进行仿真。根据上述实现方法,构造了如图2所示的Simulink仿真模型。
在模型中使用Repeating Sequence模块作为双向定时计数器,与SVPWM调制波进行比较,其输出作为滞环比较器的输入。Matlab语言编写的S函数则作为比较值的计算与分配单元。 2 仿真与分析 仿真对象:SVPWM与永磁同步电机。通过Matlab仿真得到的波形如图3所示。
说明PWM调速系统的工作原理
说明PWM调速系统的工作原理 脉冲宽度调制脉冲宽度调制(PWM)是英文“Pulse Width Modulation”的缩写,简称脉宽调制。它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。一种模拟控制方式,根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定。 脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。 多数负载(无论是电感性负载还是电容性负载)
需要的调制频率高于10Hz,通常调制频率为1kHz到200kHz之间。 许多微控制器内部都包含有PWM控制器。例如,Microchip公司的PIC16C67内含两个PWM 控制器,每一个都可以选择接通时间和周期。占空比是接通时间与周期之比;调制频率为周期的倒数。执行PWM操作之前,这种微处理器要求在软件中完成以下工作: * 设置提供调制方波的片上定时器/计数器的周期 * 在PWM控制寄存器中设置接通时间 * 设置PWM输出的方向,这个输出是一个通用I/O管脚 * 启动定时器 * 使能PWM控制器 PWM的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换。让信号保持为数字形式可将噪声影响降到最小。噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响。对噪声抵抗能力的增强是PWM相对于模拟控制的另外一个优点,而且这也是在某些时候将
直流PWM-M可逆调速系统的设计与仿真 摘要 当今,自动化控制系统已经在各行各业得到了广泛的应用和发展,而直流调速控制作为电气传动的主流在现代化生产中起着主要作用。本文主要研究直流调速系统,它主要由三部分组成,包括控制部分、功率部分、直流电动机。长期以来,直流电动机因其具有调节转速比较灵活、方法简单、易于大范围内平滑调速、控制性能好等特点,一直在传动领域占有统治地位。 微机技术的快速发展,在控制领域得到广泛应用。本文对基于微机控制的双闭环可逆直流PWM 调速系统进行了较深入的研究,从直流调速系统原理出发,逐步建立了双闭环直流PWM调速系统的数学模型,用微机硬件和软件发展的最新成果,探讨一个将微机和电力拖动控制相结合的新的控制方法,研究工作在对控制对象全面回顾的基础上,重点对控制部分展开研究,它包括对实现控制所需要的硬件和软件的探讨,控制策略和控制算法的探讨等内容。在硬件方面充分利用微机外设接口丰富,运算速度快的特点,采取软件和硬件相结合的措施,实现对转速、电流双闭环调速系统的控制。 论文分析了系统工作原理和提高调速性能的方法,研究了IGBT模块应用中驱动、吸收、保护控制等关键技术.在微机控制方面,讨论了数字触发、数字测速、数字PWM调制器、双极式H型PWM变换电路、转速与电流控制器的原理,并给出了软、硬件实现方案。 关键词:PWM调速、直流电动机、双闭环调速
目录 前言 (1) 第1章直流PWM-M调速系统 (2) 第2章UPE环节的电路波形分析 (4) 第3章电流调节器的设计 (6) 3.1 电流环结构框图的化简 (6) 3.2 电流调节器参数计算 (7) 3.3 参数校验 (8) 3.3.1 检查对电源电压的抗扰性能: (8) 3.3.2 晶闸管整流装置传递函数的近似条件 (9) 3.3.3 忽略反电动势变化对电流环动态影响的条件 (9) 3.3.4 电流环小时间常数近似处理条件 (9) 3.4 计算调节器电阻和电容 (9) 第4章转速调节器的设计 (11) 4.1 电流环的等效闭环传递函数 (11) 4.2 转速环结构的化简和转速调节器结构的选择 (11) 4.3 转速调节器的参数的计算 (14) 4.4 参数校验 (14) 4.4.1 电流环传递函数化简条件 (15) 4.4.2 转速环小时间常数近似处理条件 (15) 4.5 计算调节器电阻和电容 (15) 4.6 调速范围静差率的计算 (16) 第5章系统仿真 (17) 5.1 仿真软件Simulink介绍 (17) 5.2 Simulink仿真步骤 (17) 5.3 双闭环仿真模型 (17) 5.4 双闭环系统仿真波形图 (18) 结论 (19) 参考文献 (20)
第三节空间矢量脉宽调制SVPWM控制法 1.3.1 电压空间矢量SVPWM技术背景 我们先来回顾一下交流异步电机的工作机理:三相平衡的交流电压在电机定子绕组上产生三相平衡的交流电流;三相平衡的交流电流在定子内腔产生一个幅值恒定的磁链,该磁链在定子内腔旋转,旋转的角速度与电源(电流)的角速度相同;旋转的轨迹形成一个圆形的空间旋转磁场;旋转磁场通过电磁力矩带动转子旋转,在电动机状态下,转子旋转的角速度低于旋转磁场的角速度:转差,转差提交流异步电机产生力矩的根本原因。 前面所讨论的SPWM技术是从电源的角度出发,来合成电机的激励源。由交流异步电机的工作机理我们想到:可不可以直接从动力源出发,来直接合成一个圆形的旋转磁场呢?如果可以,这样的控制方法显然更直接,效果应更好。 如何直接合成一个圆形的旋转磁场呢? 对于交流电机,我们注意到以下的事实: 电机定子是固定的,不旋转的; 施加在定子上的电压是三相平衡的交流电:幅度相同,相位上彼此偏差120o; 自然地,我们想到:定义异步电机的三相定子绕组上的电压为平面上的一静止坐标系的三个轴,电机的相电压在各自的轴向上依正弦规律变化。见图2-1-10。 图2-1-10:相电压空间矢量图 由图2-1-10知,三个电压轴向量不同线性组合可以合成该平面上的任一个电压矢量u,即:
ππ34332201***j j j e A e A e A ++= 当三个电压轴向量对应于三相平衡交流电时,即:t U A m ωsin 1=, )32sin(2πω+=t U A m ,)3 4sin(3πω+=t U A m ,不难得到,所合成的电压矢量为: )sin (cos 2 3t j t U m ωω+= jwt m e U 2 3= 式(2-3-1) 由式(2-3-2)知,所合成的电压空间矢量具有以下特征: 电压矢量模(幅值)恒定; 电压矢量绕中性点旋转,旋转的轨迹是一个圆; 电压矢量绕中性点匀速旋转,旋转的角速度为ω; 电压矢量旋转的角速度与交流电源(电流)的角速度相同。 我们来看看电压空间矢量与空间旋转磁链之间的关系。 根据电机学理论,空间电流矢量,空间磁通矢量,电压空间矢量之间的关系为: dt d r i u ψ+=* 其中r *是电机绕组上的阻抗压降,在电机转速不是很低的情况下,通常可以忽略。于是上式可以写成: dt d ≈ 我们知道是一个空间旋转磁场:jwt m e ψ=, 于是=ψ=ψ≈+ππωωωω21)21(***)(j t j m t j m e e dt e d 式(2-3-2) 很明显,电压空间矢量,空间磁通矢量存在一维的线性关系,电压空间矢量的幅值(模)只与电机的角速度ω(转速)有关;相位上超前 π2 1。不难理解,这是由电机的电感属性引起的。 于是空间旋转磁场的特性可以用空间电压矢量的特性来等效。