
VOR导航零基础教程
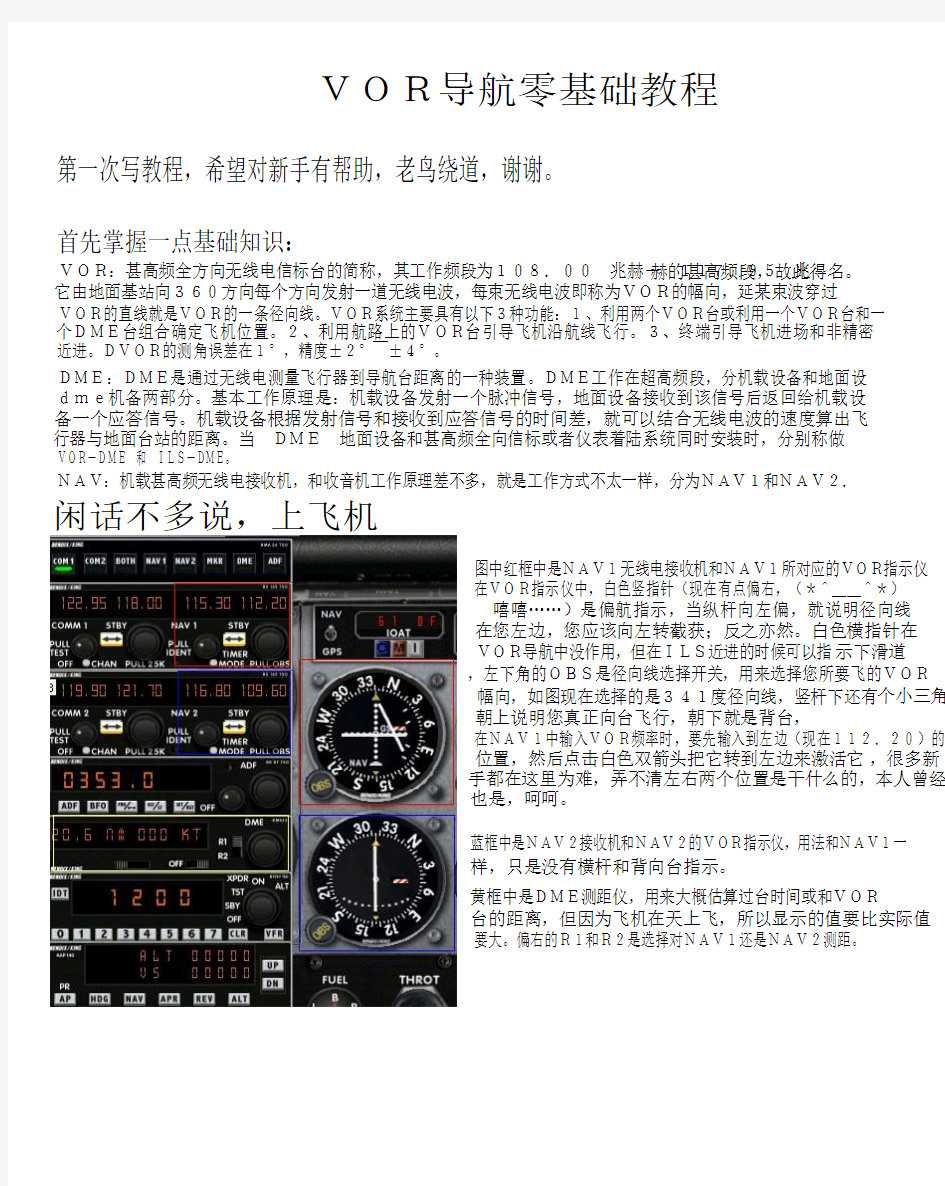
个小三角,
示下滑道
在您左边,您应该向左转截获;反之亦然。白色横指针在
在VOR指示仪中,白色竖指针(现在有点偏右,(*^__^*)
图中红框中是NAV1无线电接收机和NAV1所对应的VOR指示仪
NAV:机载甚高频无线电接收机,和收音机工作原理差不多,就是工作方式不太一样,分为NAV1和NAV2.
个DME台组合确定飞机位置。2、利用航路上的VOR台引导飞机沿航线飞行。3、终端引导飞机进场和非精密VOR的直线就是VOR的一条径向线。VOR系统主要具有以下3种功能:1、利用两个VOR台或利用一个VOR台和一它由地面基站向360方向每个方向发射一道无线电波,每束无线电波即称为VOR的幅向,延某束波穿过
第一次写教程,希望对新手有帮助,老鸟绕道,谢谢。
赫的甚高频段,故此得名。
VOR:甚高频全方向无线电信标台的简称,其工作频段为108.00 兆赫- 117.95 兆首先掌握一点基础知识:
近进。DVOR的测角误差在1°,精度±2° ̄±4°。
DME:DME是通过无线电测量飞行器到导航台距离的一种装置。DME工作在超高频段,分机载设备和地面设dme机备两部分。基本工作原理是:机载设备发射一个脉冲信号,地面设备接收到该信号后返回给机载设备一个应答信号。机载设备根据发射信号和接收到应答信号的时间差,就可以结合无线电波的速度算出飞行器与地面台站的距离。当 DME 地面设备和甚高频全向信标或者仪表着陆系统同时安装时,分别称做
VOR-DME 和 ILS-DME。
闲话不多说,上飞机
嘻嘻……)是偏航指示,当纵杆向左偏,就说明径向线
VOR导航中没作用,但在ILS近进的时候可以指,左下角的OBS是径向线选择开关,用来选择您所要飞的VOR
幅向,如图现在选择的是341度径向线,竖杆下还有朝上说明您真正向台飞行,朝下就是背台,
在NAV1中输入VOR频率时,要先输入到左边(现在112.20)的
位置,然后点击白色双箭头把它转到左边来激活它,很多新
手都在这里为难,弄不清左右两个位置是干什么的,本人曾经
也是,呵呵。
蓝框中是NAV2接收机和NAV2的VOR指示仪,用法和NAV1一
样,只是没有横杆和背向台指示。
黄框中是DME测距仪,用来大概估算过台时间或和VOR
台的距离,但因为飞机在天上飞,所以显示的值要比实际值
要大。偏右的R1和R2是选择对NAV1还是NAV2测距。
说明我们在SZX台341度径向线的左侧。
我们准备从VHHH直飞VOR台SZX115.3,从VHHH的25R跑道
起飞后我们将NAV1调到115.3,别忘了转到左边。先不要
旋转OBS,让它保持在341度,这时白色竖指针偏右.
(A)
(B)
如图B红线表示我们应该使用的航线,蓝线表示341度径
向线所在的位置,蓝箭头表示径向线的朝向,因为我们在
径向线左侧,所以白色竖杆右偏,如果我们现在向45度
航向飞去,我们就可以截获它,在完全截获时竖杆应该是
近乎垂直的,但我现在不希望这样,因为我们要直飞,
现在转动OBS(上边那个),使竖杆和后边的虚线重合使其竖直此时,我们会发现,竖杆上方
的黄色箭头不再指着341度,而是349度,那就说明现在VOR台在我们的349度方位,现在,我
们只用向349度航向飞就可以飞到VOR台上了,但要注意的是,必须要让竖杆下的小三角朝上,
如果朝下的话就继续转OBS,具体为什么我稍后解释(ps:您在使竖杆和后边的虚线重合时黄
色箭头不一定是349度,因为您和我此时的位置有可能不一样,但按您测得的航向飞也会飞到
VOR台,不用担心迷路)
正确
错误
点亮AP和NAV让飞机自动飞到VOR台,如果想省力的话,
就点亮ALT高达保持吧!
这时竖杆如图可能会左右偏动,但飞机会自动修正
如果小三角朝下了,那么恭喜您,您已经飞过了VOR台
不会飞到VOR台,而会背向的远离VOR台,这就是背
左图和A对应,表示VOR台的169度径向线,此时飞机
,截图时飞机的飞行状态完全相同,而且竖杆都垂直,可两个三角形一上一下,
(A)谈谈背台飞行
很多新手都认为,背台飞行就是背着VOR台飞,其实不是这样,背台飞行和所选的VOR幅向即径向线有关,
如下面两图所示(B)
因为A图幅向为169度,B图幅向为349度
来两张直观点的图,
箭头表示径向线,黑点表示飞机位置在径向线上,所以竖杆会垂直,要是此时点亮NAV,
飞机会沿着径向线向航向169度飞去,所以这样就
台飞行。所以说在确定VOR台的方位时一定要使小三角
朝上。如果手动的话也可以飞到VOR台上,但我个
人认为,这不能说是真正的向台飞行。左图和B对应,箭头表示349度径向线,和上图一样,
因为选择的是349度径向线,所以点亮NAV后飞机会自
动飞到VOR台。如果此时向169度,即反方向飞,小
三角依然会向上。
此时您是向台飞行,但飞过VOR台后,您就是背台飞行了。
我花了一天时间写了这个教程,希望可以对大家有帮助,而其中大部分都是我依靠自己的实际操作经验写下来的,所以肯定会有错误或者不规范的地方,请告诉我。谢谢大家。
SINO-CDG-1686
QQ:1531864061
先说一下GPS卫星导航定位的原理,如果用学术上的语言来说,是一个相当复杂的过程。但通俗的来说,也相当简单。 一个是地面发射器,一个是卫星接收器。比方说发射器叫"A",GPS卫星接收器叫"B",这样不间断的发射与接收(A-B,B-A),就形成了一个环路,类似主动雷达(也叫一次雷达),这样就可以将发射信号琐定。 至于导航方法,其实就更简单了,在发射与接收的环路过程中增加了软件系统,比方说发射与接收信号的地面与卫星的高度,路线,距离等等,这样通过软件系统来达到计算后就产生了数据,这些数据就是GPS使用者所需要的!例如地图导航,通过计算后的数据再转换成地图比例就可以准确的定位了! 另外不得不提的是GPS卫星定位车载终端设备。 车载终端设备是GPS车辆监控管理系统的前端设备,安装在被监控的车辆上。车载终端还可以隐秘地安装在各种车辆内,同时与车辆本身的油路、电路、门磁及车上的防盗器相连,可对车辆进行全方位的掌控。 车载终端设备主要由GPS接收机,GSM/GPRS收发模块,主控制模块及汽车防盗器、外接探头等各种外接设备组成。 GPS模块接收卫星的定位信号运算出自身的位置(经度、纬度、高度)、时间和运动状态(速度、航向),每秒1次送给单片机并存储,以便随时提供定位信息。MCU单片机控制整个车载台的协调工作。GSM/GPRS模块负责无线的收发传输。FSK部分负责对数据的调制解调,接收中心的指令数据和发射车载台的报警等信息。 话音控制部分用于控制免提话筒耳机,监听MIC,FSK调制解调信号的缓冲,放大,匹配,转换等功能。数字逻辑控制部分用于各种输入,输出的电平,脉冲信号的缓冲与驱动。电源及省电控制部分用于对汽车电平与后备电平的自动切换,稳压滤波并通过车匙及报警器的触发控制睡眠与苏醒。汽车防盗器部分负责对各探头的采集分析完成盗车报警的所有功能。双控熄火/断油路控制器受控于监控中心及汽车报警器。
便携式导航仪地图升级 图文教程 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT
便携式导航仪地图升级图文教程 (一)升级流程图 2、解压后,命名为PAPAGO或KLD; 3、把导航里的PAPAGO或KLD文件拷到电脑中,把原来的文件夹删除; 4、把新下载的文件夹拷进导航里; 5、设置路径,完成升级; (二)详细操作步骤说明 (以凯立德地图升级为例,其它地图升级方法一样,只是重命名的文件名称不一样,E路航命名为 PAPAGO) 1、查看地图相应版本是否最新; 凯立德版本查看方法:(最新版本信息为C1668-C7406-2342J07) 凯立德C系列查看版本号:点导航—进入导航---选择凯立德---选功能---帮助—版本信息 a)、进入凯立德导航地图界面 b)、点击“功能”按钮 c)、点击“帮助”按钮 d)、点击“版本信息”按钮
或进入凯立德导航地图后,点查找,输入“#666#”即可看到版本号; 注:如版本信息与以上版本不一样,则不是最新版本,建议升级使用; 2、下载相对应版本地图; 用迅雷下载工具,下载最新地图版本进行更新; 2011年1月份最新凯立德版本下载地址如下: 高清版本:(适用于5寸高清屏及5寸以上高清屏) 适用机型: 5寸:LH980N升级版、LH980N标准版、LH980N至尊版、E-V5定制版、E100、E-V2、E-V3、 Gphone1、T950N升级版、E500定制版、E500T、E300、E300S、 E-V5电视版 6寸; E800升级版、E-V7、T600、E800标准版、E600、E800TV升级版、 E800TV版 7寸: E700S、E700精装版、E700 普清版本:(适用于寸普清屏) 适用机型:X8升级版、LH900S升级版、LH900N升级版、E-V1升级版;E-V6 3、备份原导航中的地图文件并删除整个地图文件夹; 用数据线连接电脑后,打开导航盘符,把对应的地图文件夹拷到电脑中进行备份,以避免升级失败时还原旧地图用; 步骤: A)、用数据线与电脑相连后,打开我的电脑,找到新出现的盘符
xxxx导航系统定位原理及其应用 北斗卫星定位系统是由中国建立的区域导航定位系统。该系统由四颗(两颗工作卫星、2颗备用卫星)北斗定位卫星(北斗一号)、地面控制中心为主的地面部份、北斗用户终端三部分组成。北斗定位系统可向用户提供全天候、二十四小时的即时定位服务,授时精度可达数十纳秒(ns)的同步精度,北斗导航系统三维定位精度约几十米,授时精度约100ns。美国的GPS三维定位精度P码目前己由16m提高到6m,C/A码目前己由25-100m提高到12m,授时精度日前约20ns。。 北斗一号导航定位卫星由中国空间技术研究院研究制造。四颗导航定位卫星的发射时间分别为: 2000年10月31日; 2000年12月21日; 2003年5月25日, 2007年4月14日,第三、四颗是备用卫星。2008年北京奥运会期间,它将在交通、场馆安全的定位监控方面,和已有的GPS卫星定位系统一起,发挥?双保险?作用。北斗一号卫星定位系统的英文简称为BD,在ITU(国际电信联合会)登记的无线电频段为L波段(发射)和S波段(接收)。北斗二代卫星定位系统的英文为Compass(即指南针),在ITU登记的无线电频段为L波段。北斗一号系统的基本功能包括: 定位、通信(短消息)和授时。北斗二代系统的功能与GPS相同,即定位与授时。 其工作原理如下: ?北斗一号?卫星定位系出用户到第一颗卫星的距离,以及用户到两颗卫星距离之和,从而知道用户处于一个以第一颗卫星为球心的一个球面,和以两颗卫星为焦点的椭球面之间的交线上。另外中心控制系统从存储在计算机内的数字化地形图查寻到用户高程值,又可知道用户出于某一与地球基准椭球面平行的椭球面上。从而中心控制系统可最终计算出用户所在点的三维坐标,这个坐标
菜鸟、小白请不要自己随便胡乱升级,出现问题,本帖不负责!建议去4儿子升级! 最近车友在升级导航的时候遇到了很多问题,现在在此总结下并且提醒要升级导航的车友几个注意事项: 1,准备好一张8G或者16G的SD卡(TF卡带卡套也可以),必须格式化为FAT16或FAT32,并且卡边上的保护开关要检查下,不要写保护了,否则无法升级,导致文件错误; 2,在激活码没有弄到手之前千万不要去升级导航,否则导航变砖无法使用,只能用来听歌啊啥的了,这个一定要注意,可以先下载导航地图升级包,等激活码弄到收再去升级! 3,获取激活码的2个必要条件是提供机器码和车辆识别码后8位,有些车友不知道这2个码在哪里看!机器码在打开导航界面后--点菜单--设置--关于里面查看,如图 车辆识别码的话在你的行驶证上面查看,这个码只要提供后面8位就可以了! 4,在拿到上面2个码以后就可以去车载导航软件注册激活网站()注册获取激活码!保存好激活码,这样可以等有空的时候慢慢去升级! 5,现在激活码只针对本群车友提供!!!这下各位车友明白了没有菜鸟都应该会了吧赖人安装步骤啊!!! 升级操作说明: 一、制作导航升级卡:
1. 准备一张SD 卡(最大可以支持16GB的SD卡),格式化为FAT16或FAT32后待用;因每年地图数据都在增加,建议使用8GB容量的卡,如后续8GB卡无法装下地图数据时请自行更换到16GB的卡。 2. 将下载的最新版本导航软件解压缩后拷贝到SD 卡根目录内,根目录文件如图1。 注意:如果SD卡根目录文件与图1不一致,则无法升级。 1.导航处于关机状态,将制作好的升级卡插入需要升级的导航SD卡插座内; 然后在不踩脚刹的情况下按2下一键启动,把ACC电源打开 注意:须按照卡槽处的图示,按正确的方向插入SD卡。 2.开启导航,在完成长安铃木LOGO读取后,系统会自动进入到软件升级界面。 3.如果该车除地图软件以外还有其他软件需要升级,则会自动进入相关升级界面,如图2。 在图2中,可以看到“主控升级”和“Eboot升级”,根据升级软件的自动检测结果,有可能主控和Eboot均需升级或只需升级其中的一项;如相应项已经是最新版本则对应的升级按钮将是灰色的,点击它无反应,此时无需升级该项。 4.在图2中,根据检测的结果,依次点击对应的升级按钮,并在弹出的确认菜单中点击“是”后开始升级,如图3。
总体设计: 该系统由以陀螺仪导航系统、视觉系统、AGV子系统、电源管理系统、传感器系统和装置机械结构五部分组成。导航采用陀螺仪导航为主,视觉导航为辅,最大化融合和利用各导航的优势,提高系统的可靠性和导航精度。 其运行原理如下:AGV在接收到工作中心的指令后,由导航系统将其指引至货物装载处,装载完毕后,按照预设指令,其分析起点-终点路径后,规划出最佳行走路径,行走至指定位置。该过程中不断利用导航系统识别周围特征标志信息,以实时利用AGV子系统计算分析其所处位置,之后利用无线通信方式发送至工作中心电脑,以管理和规划工业现场的总体物流运行进度,避免相互干涉,提高运输效率。 项目技术归纳为以下几点: (1)陀螺仪导航与视觉联合导航:本系统采用陀螺仪导航系统专用模块,主要实现技术为差分定位,并结合工业现场的地图,利用车载控制系统实时分析系统地图坐标数据,之后与地图信息对比以获取定位信息。项目采用图QR码扫描自适应阈值算法的视觉技术识别运动过程中的关键标志物,辅以航位推算系统以达到路径自动辨识和规划,从而最终达到对AGV导航的目的。通过视觉定位QR码技术导航的图像获取、摄像机标定、特征提取和深度恢复等过程,以达到对物体的位置精确定位。 QR码(二维码) (2)路径规划:AGV运行路径规划分为全局规划和局部规划。全局规划中采用切线图法,即将路径中关键点作为特征点,将该特征点的切线表示弧,这样可以获取AGV起始点和目标点的最短路径,提高AGV路径进行规划的速度;局部规划中采用人工势场法,其设计思想是将AGV在工业现场作业视为一种抽象人造受力场中的运动,通过建立人工势场的负梯度方向指向系统的运动控制方向,目标点对AGV产生引力,障碍物对AGV产生斥力,其驱动结果使其在势场合力作用下控制AGV运动方向并计算AGV位置,为防止工业现场AGV在到达目标位置前陷入局部小点而无法达到预设位置,系统利用模拟退火算法使势函数跳出局部极小点,以使AGV顺利到达目标位置。 (3)多任务分解及协调:为解决多个AGV间任务分配、路径规划和相互协调,系统采用模糊动态数学模型的方法,该方法基于专家辨识系统的设计思路,将任务分配分解为“最重要、重要、一般、次要”四个等级,并将路径规划为“最近、较近、合理、备选”四个等级,之后利用模糊动态数学模型进行建模和分析,输出最佳的任务分解和路径规划。具体应用中,利用工业现场工作中心对多个AGV提前预置任务和目标路径,提供给系统的初始输入和输出,由系统自动完成对任务和路径的分析,并将指令传送至各AGV车载控制系统,以达到AGV间的任务协调和路径选取。需要指出的是,为了解决实际应用过程中由于任务的不断更
奥迪导航升级教程 升级地图可以不需要发动车辆,开车也可以升级,不需要刷隐藏的工程糢式,不用删除地图。 升级过程需要60到70分钟左右,不要长时间离开车,比如一夜或者超过三四个小时,要不然屏幕会耗电,导致电瓶馈电,不能正常着车 固件为0395或者以上的车升级请联系店主,由于固件加密了,需要先破解了在升级导航,固件0395之前可以直接升级导航,购买时咨询过店主的车可直接升级。 有些个别车在升级途中出错,是单个文件数据量比较大的原因,注意拷贝数据时取卡别急,还有就是如果PCTVGA出错,点重试就可以了,如果是INDEX出现错误,点重试无效的话,就取消退出升级,换到SD2卡槽插入接着再来重新升级如果依旧出错就把卡格式化把数据重新复制然后重新升级 适用车型A4L、A5、A6L、A8L、Q5、S5等原厂硬盘版(3GMMI系统)奥迪导航升级系列 3G奥迪车型导航仪外观如下图显示
将更新用的SD卡放入到SD1中 首先按下RADIO按键,调成收音机模式 然后同时按住SETUP+RETURN 两个按键同时按住大概6秒左右(此步骤很重要SETUP+RETURN一定要同时同步安稳,SETUP 按键稍微提前一点点,否则进入的是导航设置) 新款的车按住BACK+CAR 两个按键同时按住大概6秒,CAR按键稍微提前一点点。
进入到奥迪工程模式,选择软件下载
选择SD卡槽 根据提示进行下一步的操作,选择标准 下一步转动大圆扭
因为其他的部件不在这个地图数据中,所以不需要更新,显示都为不适用,有更新的会提示为:是 调到最后一个选项:开始下载 选择:开始
毕业论文(设计)题目:浅谈车载导航的原理 系别: 建筑工程系 专业: 建筑工程技术 学生姓名: 成绩: 指导教师: 2012年4月
商丘工学院毕业论文 摘要 本文介绍了车载导航的来源,及其在当今社会中给人们带来的便利,另外主要介绍了车载导航的基本原理和功能,下面我就为大家根据自己的见解来简单地阐述一下车载导航的历史古今和它的的一些基本原理分析,并根据自己的观点来提出现如今车载导航的应用弊端及未来发展方向。希望大家能共同交流和学习。 关键词:车载导航的原理应用用途发展方向
浅谈车载导航的原理 目录 摘要··························································································· II 绪论 (1) 1 车载导航的概念及构成 (1) 1.1 车载导航的概念 (1) 1.2 车载导航的来源 (2) 1.3 车载导航的主要构成部分 (2) 2车载导航的基本原理及应用 (3) 2.1 卫星如何采像及原理 (3) 2.2 地面信息接收及计算机处理系统的功能及重要性 (4) 2.3 各系统之间关联及密切作用 (4) 2.4 车载导航在现实生活中的应用 (5) 3 车载导航的弊端及误差来源 (5) 3.1 车载导航的弊端 (6) 3.2 精确程度及误差来源 (6) 3.3 发展前景和改进趋向 (7) 4 车载导航技术的运用及和人类的关系 (7) 4.1 车载导航的功能 (8) 4.2 市场如何挑选车载导航产品 (8) 结论 (9) 参考文献 (10)
商丘工学院毕业论文 绪论 “车载导航”现在对人们来说已经不是一个新鲜的名词,它的运用解决了很多人因在陌生地区找不到路的苦恼,减少了因看不清路标而造成的不必要的后果。他可以让您在驾驶汽车时随时随地知晓自己的确切位置。车载导航其具有的自动语音导航、最佳路径搜索等功能让您一路捷径、畅行无阻,集成的办公、娱乐功能让您轻松行驶、高效出行!车载导航的使用是人类科学发展史上智慧的结晶。它的出现一方面给人们带来了巨大的交通便利,另一方面也存在着很多的弊端问题。还有更为深层的一方面问题,美国无偿为世界提供24颗卫星用来发展车载导航,这也不得不给人以深思。我国在利用此项高端技术的同时也不得不加紧军事机密的防范。未来的车载导航必然会迈向一个更智能更人性化的而一面发展,这就需要21世纪的新力军了,你准备好了吗!
便携式导航仪地图升级图 文教程 Prepared on 22 November 2020
便携式导航仪地图升级图文教程 (一)升级流程图 2、解压后,命名为PAPAGO或KLD; 3、把导航里的PAPAGO或KLD文件拷到电脑中,把原来的文件夹删除; 4、把新下载的文件夹拷进导航里; 5、设置路径,完成升级; (二)详细操作步骤说明 (以凯立德地图升级为例,其它地图升级方法一样,只是重命名的文件名称不一样,E路航命名为 PAPAGO) 1、查看地图相应版本是否最新; 凯立德版本查看方法:(最新版本信息为C1668-C7406-2342J07) 凯立德C系列查看版本号:点导航—进入导航---选择凯立德---选功能---帮助—版本信息 a)、进入凯立德导航地图界面 b)、点击“功能”按钮 c)、点击“帮助”按钮 d)、点击“版本信息”按钮
或进入凯立德导航地图后,点查找,输入“#666#”即可看到版本号; 注:如版本信息与以上版本不一样,则不是最新版本,建议升级使用; 2、下载相对应版本地图; 用迅雷下载工具,下载最新地图版本进行更新; 2011年1月份最新凯立德版本下载地址如下: 高清版本:(适用于5寸高清屏及5寸以上高清屏) 适用机型: 5寸:LH980N升级版、LH980N标准版、LH980N至尊版、E-V5定制版、E100、E-V2、E-V3、 Gphone1、T950N升级版、E500定制版、E500T、E300、E300S、 E-V5电视版 6寸; E800升级版、E-V7、T600、E800标准版、E600、E800TV升级版、 E800TV版 7寸: E700S、E700精装版、E700 普清版本:(适用于寸普清屏) 适用机型:X8升级版、LH900S升级版、LH900N升级版、E-V1升级版;E-V6 3、备份原导航中的地图文件并删除整个地图文件夹; 用数据线连接电脑后,打开导航盘符,把对应的地图文件夹拷到电脑中进行备份,以避免升级失败时还原旧地图用; 步骤: A)、用数据线与电脑相连后,打开我的电脑,找到新出现的盘符
位置服务已经成为越来越热的一门技术,也将成为以后所有移动设备(智能手机、掌上电脑等)的标配。而定位导航技术中,目前精度最高、应用最广泛的,自然非GPS莫属了。网络上介绍GPS原理的专业资料很多,而本文试图从编程人员的角度出发,以一种程序员易于理解的方式来简单介绍一下GPS定位的基本原理,希望对做GPS开发的朋友有所启发。当然,本文并没有涉及具体的开发方面的技术。 之所以先介绍数学模型,是因为我认为这个数学模型可能是程序员比较关心的问题。当然事先声明,这个模型只是我根据一些GPS资料总专为程序员总结出来的一个简化模型,细节方面可能并不符合实际,想了解具体细节请参考专业的GPS讲解资料。 GPS定位,实际上就是通过四颗已知位置的卫星来确定GPS接收器的位置。 如上图所示,图中的GPS接收器为当前要确定位置的设备,卫星1、2、3、4为本次定位要用到的四颗卫星: 那么定位的过程,简单来讲就是通过一个函数GetLocation(),从已知的[Position1,d1]、[Position2,d2]、[Position3,d3]、[Position4,d4]四对数据中求出Location的值。用程序员熟悉的函数调用来表示就是: 一看到这个函数调用,程序员们就该来劲了:这些参数从哪里来?这个函数又是如何执行?由谁来执行的呢?立体几何还没有忘干净的可能还要问:为什么必须要4对参数呢?那下面我们就来一起探究一下。
实际上,运行于宇宙空间的GPS卫星,每一个都在时刻不停地通过卫星信号向全世界广播自己的当前位置坐标信息。任何一个GPS接收器都可以通过天线很轻松地接收到这些信息,并且能够读懂这些信息(这其实也是每一个GPS芯片的核心功能之一)。这就是这些位置信息的来源。 我们已经知道每一个GPS卫星都在不辞辛劳地广播自己的位置,那么在发送位置信息的同时,也会附加上该数据包发出时的时间戳。GPS接收器收到数据包后,用当前时间(当前时间当然只能由GPS接收器自己来确定了)减去时间戳上的时间,就是数据包在空中传输所用的时间了。 知道了数据包在空中的传输时间,那么乘上他的传输速度,就是数据包在空中传输的距离,也就是该卫星到GPS接收器的距离了。数据包是通过无线电波传送的,那么理想速度就是光速c,把传播时间记为Ti的话,用公式表示就是: 这就是di(i=1,2,3,4)的来源了。 这个函数是我为了说明问题而虚构的,事实上未必存在,但是一定存在这样类似的运算逻辑。这些运算逻辑可以由软件来实现,但是事实上可能大都是由硬件芯片来完成的(这可能也是每一个GPS芯片的核心功能之一)。 根据立体几何知识,三维空间中,三对[Positioni,di]这样的数据就可以确定一个点了(实际上可能是两个,但我们可以通过逻辑判断舍去一个),为什么这里需要四对呢?理想情况下,的确三对就够了,也就是说理想情况下只需要三颗卫星就可以实现GPS定位。但是事实上,必须要四颗。 因为根据上面的公式,di是通过c*Ti计算出来的,而我们知道c值是很大的(理想速度即光速),那么对于时间Ti而言,一个极小的误差都会被放大很多倍从而导致整个结果无效。也就是说,在GPS定位中,对时间的精度要求是极高的。GPS卫星上是用銫原子钟来计时的,但是我们不可能为每一个GPS接收器也配一个銫原子钟,因为一个銫原子钟的价格可能已经超过了这个GPS设备再加上使用GPS的这辆名贵汽车的价格。 同时,由于速度c也会受到空中电离层的影响,因此也会有误差;再者,GPS卫星广播的自己的位置也可能会有误差。其他等等一些因素也会影响数据的精确度。 总之,数据是存在误差的。这些误差可能导致定位精确度降低,也可能直接导致定位无效。GetLocation(函数)中多用了一组数据,正是为了来校正误差。至于具体的细节,我们就不用关心了,我们只要知道,多用一组数据,就可以通过一些巧妙的算法,消除或减小误差,
北斗导航系统系统构成与工作原理 作者:admin 来源:未知日期:2011-4-6 9:52:55 人气:61 标签: 导航系统 导读:北斗导航系统系统构成与工作原理【车载GPS导航网】北斗卫星定位系统由两颗地球静止卫星(800E和1400E)、一颗在轨备份卫星(110.50E)、中心控制系统、标校系统和各类… 北斗导航系统系统构成与工作原理 【车载GPS导航网】北斗卫星定位系统由两颗地球静止卫星(800E和1400E)、一颗在轨备份卫星(110.50E)、中心控制系统、标校系统和各类用户机等部分组成。系统的工作过程是:首先由中心控制系统向卫星Ⅰ和卫星Ⅱ同时发送询问信号,径卫星转发器项服务区内的用户广播。用户响应其中一颗卫星的询问信号,并同时向两颗卫星发送响应信号,径卫星转发回中心控制系统。中心控制系统接收并解调用户发来的信号,然后根据用的申请服务内容进行相应的数据处理。对定位申请,中心控制系统测出两个时间延迟:即从中心控制系统发出询问信号,经某一颗卫星转发到达用户,用户发出定位响应信号,经同一颗卫星转发回中心控制系统的延迟;和从中心控制发出询问信号,经上述同一卫星到达用户,用户发出响应信号,经另一颗卫星转发回中心控制系统的延迟。由于中心控制系统和两颗卫星的位置均是已知的,因此由上面两个延迟量可以算出用户到第一颗卫星的距离,以及用户到两颗卫星距离之和,从而知道用户处于一个以第一颗卫星
为球心的一个球面,和以两颗卫星为焦点的椭球面之间的交线上。另外中心控制系统从存储在计算机内的数字化地形图查寻到用户高程值,又可知道用户出于某一与地球基准椭球面平行的椭球面上。从而中心控制系统可最终计算出用户所在点的三维坐标,这个坐标经加密由出站信号发送给用户。 北斗卫星定位系统覆盖范围是北纬5°~55°,东经70°~140°之间的心脏地区,上大下小,最宽处在北纬35°左右。其定位精度为水平精度100m(1 σ),设立标校站之后为20 m(类似差分状态)。工作频率:2 491.75 MHz。系统能容纳的用户数为每小时540 000户。 由于在定位时需要用户终端向定位卫星发送定位信号,由信号到达定位卫星时间的差值计算用户位置,所以被称为“有源定位”。 北斗系统三大功能 快速定位:北斗系统可为服务区域内用户提供全天候、高精度、快速实时定位服务,定位精度20—100m; 短报文通信:北斗系统用户终端具有双向报文通信功能,用户可以一次传送40-60个汉字的短报文信息; 精密授时:北斗系统具有精密授时功能,可向用户提供 20ns-100ns时间同步精度
便携式导航仪地图升级图文教程 (一)升级流程图 步骤如下: 1、下载对应的地图(高清下载高清版本,普清下载普清版本); 2、解压后,命名为PAPAGO或KLD; 3、把导航里的PAPAGO或KLD文件拷到电脑中,把原来的文件夹删除; 4、把新下载的文件夹拷进导航里; 5、设置路径,完成升级; (二)详细操作步骤说明 (以凯立德地图升级为例,其它地图升级方法一样,只是重命名的文件名称不一样,E路航命名为PAPAGO) 1、查看地图相应版本是否最新; 凯立德版本查看方法:(最新版本信息为C1668-C7406-2342J07) 凯立德C系列查看版本号:点导航—进入导航---选择凯立德---选功能---帮助—版本信息 a)、进入凯立德导航地图界面 b)、点击“功能”按钮 c)、点击“帮助”按钮 d)、点击“版本信息”按钮 或进入凯立德导航地图后,点查找,输入“#666#”即可看到版本号;
注:如版本信息与以上版本不一样,则不是最新版本,建议升级使用; 2、下载相对应版本地图; 用迅雷下载工具,下载最新地图版本进行更新; 2011年1月份最新凯立德版本下载地址如下: 高清版本:(适用于5寸高清屏及5寸以上高清屏) https://www.doczj.com/doc/557286909.html,/rodey/ditu/2011-01/KLD(20110110_800x480).rar 适用机型: 5寸:LH980N升级版、LH980N标准版、LH980N至尊版、E-V5定制版、E100、E-V2、E-V3、 Gphone1、T950N升级版、E500定制版、E500T、E300、E300S、 E-V5电视版6寸; E800升级版、E-V7、T600、E800标准版、E600、E800TV升级版、E800TV版7寸: E700S、E700精装版、E700 普清版本:(适用于4.3寸普清屏) https://www.doczj.com/doc/557286909.html,/rodey/ditu/2011-01/KLD(20110110_480x272).rar 适用机型:X8升级版、LH900S升级版、LH900N升级版、E-V1升级版;E-V6
GPS导航定位原理以及定位解算算法 全球定位系统(GPS)是英文Global POSitiOning SyStem 的字头缩写词的简称。它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。 GPS用户部分的核心是GPS接收机。其主要由基带信号处理和导航解算两部分组成。其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导 航数据解码等工作。导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算, 并将其从伪距中消除;根据上述结果进行接收机PVT (位置、速度、时间)的解算;对各精 度因子(DoP)进行实时计算和监测以确定定位解的精度。 本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。 1 地球坐标系简述 要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相 对于地球而言的。因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动 的坐标系、即地球坐标系作为参照系。 地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ构成右手坐标系(即指向东经90 度方向)。 地球大地坐标系的定义是:地球椭球的中心与地球质心重合,椭球的短轴与地球自转 轴重合。地球表面任意一点的大地纬度为过该点之椭球法线与椭球赤道面的夹角φ经度 为该点所在之椭球子午面与格林威治大地子午面之间的夹角λ,该点的高度h为该点沿椭 球法线至椭球面的距离。设地球表面任意一点P在地球直角坐标系内表达为P( X,y,Z ),在地球大地坐标系内表达为P (φλ,h)。则两者互换关系为:大地坐标系变为直角坐标 系: (1)
惯性导航系统基本工作原理 惯性导航系统是十分复杂的高精度机电综合系统,只有当科学技术发展到一定高度时工程上才能实现这种系统,但其基本工作原理却以经典的牛顿力学为基础。 设质量m受弹簧的约束,悬挂弹簧的壳体固定在载体上,载体以加速度a 作水平运动,则m处于平衡后,所受到的水平约束力F与a的关系满足牛顿第二 定律: F a m =。测量水平约束力F,求的a,对a积分一次,即得水平速度,再 积分一次即得水平位移。以上所述是简单化了的理性情况。由于运载体不可能只作水平运动,当有姿态变化时,必须测得沿固定坐标系的加速度,所以加速度计必须安装在惯性平台上,平台靠陀螺维持要求的空间角位置,导航计算和对平台的控制由计算机完成。 陀螺仪组件测取沿运载体坐标系3个轴的角速度信号,并被送入导航计算机,经误差补偿计算后进行姿态矩阵计算。加速度计组件测取沿运载体坐标系3个轴的加速度信号,并被送入导航计算机,经误差补偿计算后,进行由运载体坐标系至“平台坐标系”的坐标变换计算。他们沿机体坐标系三轴安装,并且与机体固连,它们所测得的都是机体坐标系下的物理量。 参与控制和测量的陀螺和加速度计称为惯性器件,这是因为陀螺和加速度计都是相对惯性空间测量的,也就是说加速度计输出的是运载体的绝对加速度,陀螺输出的是运载体相对惯性空间的角速度或角增量。而加速度和角速度或角增量包含了运载体全部的信息,所以惯导系统仅靠系统本身的惯性器件就能获得导航用的全部信息,它既不向外辐射任何信息,也不需要任何其他系统提供外来信息,就能在全天候条件下,在全球范围内和所有介质环境里自主、隐蔽的进行三维导航,也可用于外层空间的三维导航。 惯导系统的比力方程 惯导系统根据与系统类型相应的数学方程(称之为力学编排)对惯性器件的输出作处理,从而获得导航数据。尽管各种类型的系统相应的力学编排各不相同,但他们都源自同一个方程:比力方程。比力方程描述了加速度计输出量与运载体速度之间的解析关系: 式中: eT v为运载体的地速向量;f为比力向量,是作用在加速度计质量块 单位质量上的非引力外力,由加速度计测量;g为重力加速度; ie ω为地球自转
赛格GPS导航系统原理、定位原理 GPS导航系统的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。要达到这一目的,卫星的位置可以根据星载时钟所记录的时间在卫星星历中查出。而用户到卫星的距离则通过纪录卫星信号传播到用户所经历的时间,再将其乘以光速得到(由于大气层电离层的干扰,这一距离并不是用户与卫星之间的真实距离,而是伪距(PR):当GPS卫星正常工作时,会不断地用1和0二进制码元组成的伪随机码(简称伪码)发射导航电文。GPS系统使用的伪码一共有两种,分别是民用的C/A码和军用的P(Y)码。C/A码频率1.023MHz,重复周期一毫秒,码间距1微秒,相当于300m;P码频率10.23MHz,重复周期266.4天,码间距0.1微秒,相当于30m。而Y码是在P码的基础上形成的,保密性能更佳。导航电文包括卫星星历、工作状况、时钟改正、电离层时延修正、大气折射修正等信息。它是从卫星信号中解调制出来,以50b/s调制在载频上发射的。导航电文每个主帧中包含5个子帧每帧长6s。前三帧各10个字码;每三十秒重复一次,每小时更新一次。后两帧共15000b。导航电文中的内容主要有遥测码、转换码、第1、2、3数据块,其中最重要的则为星历数据。当用户接受到导航电文时,提取出卫星时间并将其与自己的时钟做对比便可得知卫星与用户的距离,再利用导航电文中的卫星星历数据推算出卫星发射电文时所处位置,用户在WGS-84大地坐标系中的位置速度等信息便可得知。 可见GPS导航系统卫星部分的作用就是不断地发射导航电文。然而,由于用户接受机使用的时钟与卫星星载时钟不可能总是同步,所以除了用户的三维坐标x、y、z外,还要引进一个Δt即卫星与接收机之间的时间差作为未知数,然后用4个方程将这4个未知数解出来。所以如果想知道接收机所处的位置,至少要能接收到4个卫星的信号。 GPS接收机可接收到可用于授时的准确至纳秒级的时间信息;用于预报未来几个月内卫星所处概略位置的预报星历;用于计算定位时所需卫星坐标的广播星历,精度为几米至几十米(各个卫星不同,随时变化);以及GPS系统信息,如卫星状况等。 GPS接收机对码的量测就可得到卫星到接收机的距离,由于含有接收机卫星钟的误差及大气传播误差,故称为伪距。对0A码测得的伪距称为UA码伪距,精度约为20米左右,对P码测得的伪距称为P码伪距,精度约为2米左右。 GPS接收机对收到的卫星信号,进行解码或采用其它技术,将调制在载波上的信息去掉后,就可以恢复载波。严格而言,载波相位应被称为载波拍频相位,它是收到的受多普勒频移影响的卫星信号载波相位与接收机本机振荡产生信号相位之差。一般在接收机钟确定的历元时刻量测,保持对卫星信号的跟踪,就可记录下相位的变化值,但开始观测时的接收机和卫星振荡器的相位初值是不知道的,起始历元的相位整数也是不知道的,即整周模糊度,只能在数据处理中作为参数解算。相位观测值的精度高至毫米,但前提是解出整周模糊度,因此只有在相对定位、并有一段连续观测值时才能使用相位观测值,而要达到优于米级的定位精度也只能采用相位观测值。 按定位方式,GPS定位分为单点定位和相对定位(差分定位)。单点定位就是根据一台接收机的观测数据来确定接收机位置的方式,它只能采用伪距观测量,可用于车船等的概略导航定位。相对定位(差分定位)是根据两台以上接收机的观测数据来确定观测点之间的相对位置的方法,它既可采用伪距观测量也可采用相位观测量,大地测量或工程测量均应采用相位观测值进行相对定位。 在GPS观测量中包含了卫星和接收机的钟差、大气传播延迟、多路径效应等误差,在定位计算时还要受到卫星广播星历误差的影响,在进行相对定位时大部分公共误差被抵消或
1试说明GPS全球定位系统的组成以及各个部分的作用。 (1) 空间星座 GPS卫星星座由24颗(3颗备用)卫星组成,分布在6个轨道内,每个轨道4颗。 基本功能:接收和存储由地面监控站发出的导航信息,接收并执行监控站的控制指令;利用卫星的微处理机,对部分必要的数据进行处理;通过星载原子钟提供精密时间标准;向用户发送定位信息;在地面监控站的指令下,通过推进器调整卫星姿态和启用备用卫星。 (2) 地面监控 地面监控部分由分布在全球的5个地面站组成,包括5个监测站,1个主控站,3个信息注入站。 监测站:对GPS卫星进行连续观测,进行数据自动采集并监测卫星的工作状况。 主控站:协调和管理地面监控系统,主要任务:根据本站和其它监测站的观测资料,推算编制各卫星星历、卫星钟差和大气修正参数,并将数据传送到注入站;提供全球定位系统时间基准;各监测站和GPS卫星原子钟,均应与主控站原子钟同步,测出其间的钟差,将钟差信息编入导航电文,送入注入站;调整偏离轨道的卫星,使之沿预定轨道运行;启用备用卫星代替失效工作卫星。 注入站:在主控站控制下,将主控站推算和编制的卫星星历、钟差、导航电文和其它控制指令等,注入到相应卫星的存储系统,并监测注入信息的正确性。 (3) 用户设备 由GPS接收机硬件和数据处理软件以及微处理机和终端设备组成。 GPS接收机硬件主要接收GPS卫星发射的信号,以获得必要的导航和定位信息及观测量,并经简单数据处理而实现实时导航和定位。GPS软件主要对观测数据进行精加工,以便获得精密定位结果。 2试说明我国北斗导航卫星系统与GPS的区别 一是使用范围不同。“北斗一号”是区域卫星导航系统,只能用于中国及其周边地区,而GPS是全球导航定位系统,在全球的任何一点只要卫星信号未被遮蔽或干扰,都能接收到三维坐标数据。二是卫星的数量和轨道是不同的。“北斗一号”有3颗,位于高度近3.6万千米的地球同步轨道。三是定位原理不同。“北斗一号”是用户首先发射要求服务的信号,通过卫星转发至地面控制中心,地面控制中心计算出用户机的位置后再通过卫星答复用户,而GPS只需要4个卫星的位置信息,由用户接收机解算出三维坐标,由于“北斗一号”本身是二维导航系统,仅靠2颗星的观测信号尚不能定位,观测信号的获得需要具有转发或收发信号功能,而通信功能是GPS不具备的。 3 GPS相较其他导航定位系统的特点 1.功能多,用途广.可以用于导航,测时,测速,测量及授时. 2.定位精度高. 3.实时定位. 天球:以地球质心为中心,半径r为任意长的一个假想的球体。 大地经纬度:大地经度是指通过参考椭球面上某一点的大地子午面与本初子午面之间的二面角,大地纬度是指过参考椭球面上某一点的法线与赤道面的夹角 天文经纬度:天文经度是指本初子午面与过观测点的子午面所夹的二面角,天文纬度是指过某点的铅垂线与赤道平面之间的夹角。 黄道:地球公转的轨道面与天球相交的大圆即地球绕太阳公转时,地球上观测者所见到太阳在天球上运动的轨迹春分点:当太阳在黄道上从天球南半球向北半球运行时,黄道与天球赤道的交点 赤经:从春分点沿着天赤道向东到天体时圈与天赤道的交点所夹的角度 赤纬:从天赤道沿着天体的时圈至天体的角度
凯立德2015年最新版升级攻略(附详细图文教程和程序) 今日闲来无事,便对车载导航凯立德地图进行了升级。现将升级步骤和文件分享一下,需要升级的朋友可以按照图示说明,自己完全可以搞定,不必去4S店花上个一百多大洋了。当然,网上也有很多破解版升级方法和文件,大家也可以参考一下。 注意:此方法和程序只适用于机车版。内存卡至少要8G 第一步:下载主程序和地图包 1、凯立德导航地图2015年1月9日最新 C2056-C7K02-3321J0L 高清800x480 高清主程序下载地址(百度及迅雷二选一): 百度网盘https://www.doczj.com/doc/557286909.html,/s/1pJLVY5P 迅雷下载 https://www.doczj.com/doc/557286909.html,/d/daQlAQKsIgB7Qa9U337 2、凯立德2014秋季版(3321J0L)地图包官方BT种子下载地址2014年12月3日更新 BT种子下载地址(百度+迅雷二选一) 百度网盘https://www.doczj.com/doc/557286909.html,/s/1pJAzCxX 迅雷下载 https://www.doczj.com/doc/557286909.html,/d/daQlAQIpFwBP5X1U92e3、将下载的GPS之家-C2056-C7K02-3321J0L.rar 解压后得到的
NaviOne文件夹,然后将地图包下载得到的8个地图数据文件复制到NaviOne中,再将整个NaviOne文件夹复制到卡中,然后运行主程序NaviOne.exe即可。第二步:更改端口和波特率 端口COM2 波特率4800 不同导航仪端口请修改NaviResFile 文件夹中的NaviConfig.dll 端口修改工具下载(不要修改取码方式默认40 改了这项激活码会不对) 百度网盘https://www.doczj.com/doc/557286909.html,/s/1i3GcQ1J 如果机器本身的端口和波特率一样,可省去本步第三步:升级更新包 安装正常使用后,可以升级到官方发布的SP2精选包 凯立德2014秋季版SP2官方数据下载(百度+迅雷二选一)百度网盘https://www.doczj.com/doc/557286909.html,/s/1jfN9W 迅雷下载 https://www.doczj.com/doc/557286909.html,/d/daQlAQLZLgAwe4BUf09 安装方法:将下载的4个文件复制到凯立德NaviOne文件夹下即可下面,附上详细的安装图朗逸2011款,将导航放到车前边的储物盒里,刚好,用时可以打开,不用时可以扣上,既美观又不影响视线。插入卡后,开机,导航启动第一次运行,要求输入激活码这是激活码输入正确后会显示一个勾按
14 全球定位系统(GPS)定位原理简介 一、填空题: 1、GPS接收机基本观测值有伪距观测值、载波相位观测值。 2、GPS接收机按用途分,可分为导航型接收机、测地型接收机、授时型接收机和姿态测量型接收机。其中测地型接收机,按载波频率又可分为单频接收机、双频接收机。 3、GPS接收机主要由GPS接收机天线、GPS接收机主机和电源三部分组成。 4、GPS定位是利用空间测距交会定点原理。 5、全球定位系统(GPS)主要由空间卫星部分、地面监控部分和用户设备三部分组成。 6、GPS卫星星座由 24颗卫星组成。其中21颗工作卫星, 3 颗备用卫星。工作卫星分布在 6 个近圆形的轨道面内,每个轨道上有 4 颗卫星。GPS工作卫星距离地面的平均高度是20200km。 7、地面监控部分按功能可分为监测站、主控站和注入站三种。 8、GPS接收机接收的卫星信号有:伪距观测值和载波相位观测值及卫星广播星历。 9、根据测距原理,GPS卫星定位方法有伪距定位法、载波相位测量定位和 G PS 差分定位。对于待定点位,根据接收机运动状态可分为静态定位和动态定位。根据获取定位结果的时间可分为实时定位和非实时定位。 10、在两个测站上分别安置接收机,同步观测相同的卫星,以确定两点间相对位置的定位方法称为相对定位。 11、载波相位相对定位普遍采用将相位观测值进行线性组合的方法。具体方法有三种,即单差法、双差法和三差法。 12、GPS差分定位系统由基准站、流动站和无线电通信链三部分组成。 13、GPS测量实施过程与常规测量一样包括方案设计、外业测量和内业数据处理三部分。 二、名词解释: 1、伪距单点定位----利用GPS接收机在某一时刻测定的四颗以上GPS卫星伪距及从卫星导航电文中获得的卫星位置,采用距离交会法求定天线所在的三维坐标. 2、载波相位相对定位----用两台GPS接收机,分别安置在测线两端(该测线称为基线),固定不动,同步接收GPS卫星信号。利用相同卫星的相位观测值进行解算,求定基线端点在WGS一84坐标系中的相对位置或基线向量。当其中一个端点坐标已知,则可推算另一个待定点的坐标。 3、整周跳变----当GPS接收机在跟踪卫星进行载波相位测量过程中,若因某种原因引起对卫星跟踪短暂失锁,如卫星和接收机天线之间视线方向有阻挡物或接收机受到外界电磁干扰等,将造成载波相位整周观测值的意外丢失现象。这种现象称为整周跳变。 4、静态定位---进行GPS定位时,接收机的天线始终处于静止状态,用GPS测定相对于地球不运动的点位。GPS接收机安置在该点上,接收数分钟乃至更长时间,以确定其三维坐标,又称为绝对定位。 5、动态定位----进行GPS定位时,接收机的天线始终处于运动过程中,动态定位
华阳CE6AC8一体机凯立德导航自主升级教程 1.首先要下载目前最新的基于Win CE操作系统的“凯立德”地图包及主程序 2.我们进入国内做导航软件做的最大的“我爱GPS”论坛https://www.doczj.com/doc/557286909.html,/,进行下载。不过首先要注册一个账号,并登陆,注册是免费的。 3.注册并登陆后进入“GPS导航地图区(WinCE系统导航仪专用地图升级区)”板块中的“凯立德GPS地图”分板块 4.进入分板块后点击“800*480”分辨率按钮
5.一般我们按回帖率找一个最新版本的,适合自己导航仪的版本先下载下来我这里随机找了一个帖子
6.对下载后的4个分卷压缩包进行解压,解压密码为https://www.doczj.com/doc/557286909.html, 7.进入该文件夹内,找到“NaviOne”文件夹,一般我们找到这个文件夹把他拷贝到闪存卡(T-Flash卡、SD卡)的根目录后,用上面帖子中的端口修改器下载地址, 下载后把修改器拷贝到“NaviOne”文件夹下“NaviResFile”文件夹中修改该文件夹下“NaviConfig.dll”文件中对应的“端口”和“速率”为端口“COM6”、速率“9600”即可。(端口、和速率每台不同型号的导航都不相同,如不是“华阳CE6AC8”请事先获取原闪存卡“NaviOne”文件夹下 “NaviResFile”文件夹中“NaviConfig.dll”的“端口”和“速率”,把拷贝到原卡的这个目录后运行,弹出界面后默认的“端口”和“速率”即你导航仪的那个对应值,如“端口”和“速率”设置错误导致的后果就是能打开导航软件而不发搜到卫星,无法定位当前位置)
8.下面我们来对比下原闪存卡和下载的文件有何区别: 1).原闪存卡的名称叫“MXNAVI”,保险起见如需换卡也可以把新卡的名字重命名为“MXNAVI” 2).原闪存卡根目录只有两个文件夹(LBSInfo和MobileNavigator),并未见到“NaviOne”文件夹 但进入上图中的“MobileNavigator”文件夹后发现其中的文件和下载的“NaviOne”文件夹中的文件大同小异,下面我们来看对比图: 经过对比我们可以发现图中的凯立德Logo主程序的名称在下载包和原卡中的名字是不同的,这也就解释了本人之前为什么在修改“端口”和“速率”后放到“华阳CE6AC8”一体机中始终无法运行凯立德软