单元机组协调控制系统设计 摘要 在单元制机组的不断发展,协调控制系统作为单元制机组的控制核心,已然成为电厂自动化系统中最为关键的组成单元。随着机组类型的不同,各个机组的参数也越来越高,容量也在逐渐增进,机组的动态特征和控制难度也随机组型号的不同而改动,因此不同机组的协调控制系统也是不同的。所以在设计协调控制系统时,应该综合考虑所研究机组的动态特征和生产流程,针对不同类型机组的进行相应的方略。在火电厂现场中,单元机组协调控制系统是一个具有强耦合、大时滞、大迟延、非线性等特征的一个多变量系统。所以,这些复杂的动态特征,使得创建单元机组的非线性动态模型成为一个难点,而且使协调控制及其参数整定变得复杂起来,往往使调节品质下降,不能得到令人中意的控制品质。 本文首先阐述了单元机组协调控制系统的结构和功能,并对机组的动态特征和负荷指令管理系统进行了描述。然后以一个300MW机组为研究对象,由分析得出该机组的模型结构,再对辨识出的协调系统的对象进行静态解耦控制,用工程正定法对解耦控制器参数进行整定,并用Matlab软件做了系统仿真。仿真结果表明,解耦后的协调控制系统可以达到令人满意的控制品质和效果。 关键词:协调控制;解耦控制;Matlab仿真;PID整定;300MW机组
Design of Coordinated Control System for Unit Abstract In the continuous development of unit system, coordinated control system as a unit system control core, has become the power plant automation system, the most critical component. With the different types of units, the parameters of each unit are getting higher and higher, the capacity is gradually increasing, the dynamic characteristics of the unit and the difficulty of control are also different types of change, so different units of the coordinated control system is different. Therefore, in the design of coordinated control system, should consider the selected units of the dynamic characteristics and process, for different types of units for the corresponding design. In the field of thermal power plant, the unit control system is a multivariable system with strong coupling, time variability, large delay and non-linearity. Therefore, these complex dynamic characteristics make the nonlinear dynamic model of the unit unit become a difficult point, and make the coordination control and its parameter setting become complicated, and the adjustment quality is often reduced, and the satisfactory control effect can not be obtained. In this paper, the structure and function of the unit control system are described, and the dynamic characteristics and load command management system of the unit are described. Then, a 300MW unit is taken as the object of study, and the model structure of the unit is obtained. The decoupling control of the identified coordinate system is carried out. The parameters of the decoupling controller are set by engineering positive definite method. Software to do the system simulation. The simulation results show that the coordinated control system can achieve satisfactory control quality and effect. Keywords:Coordination control system;Decoupling control;Matlab simulation;PID tuning ;300MW unit
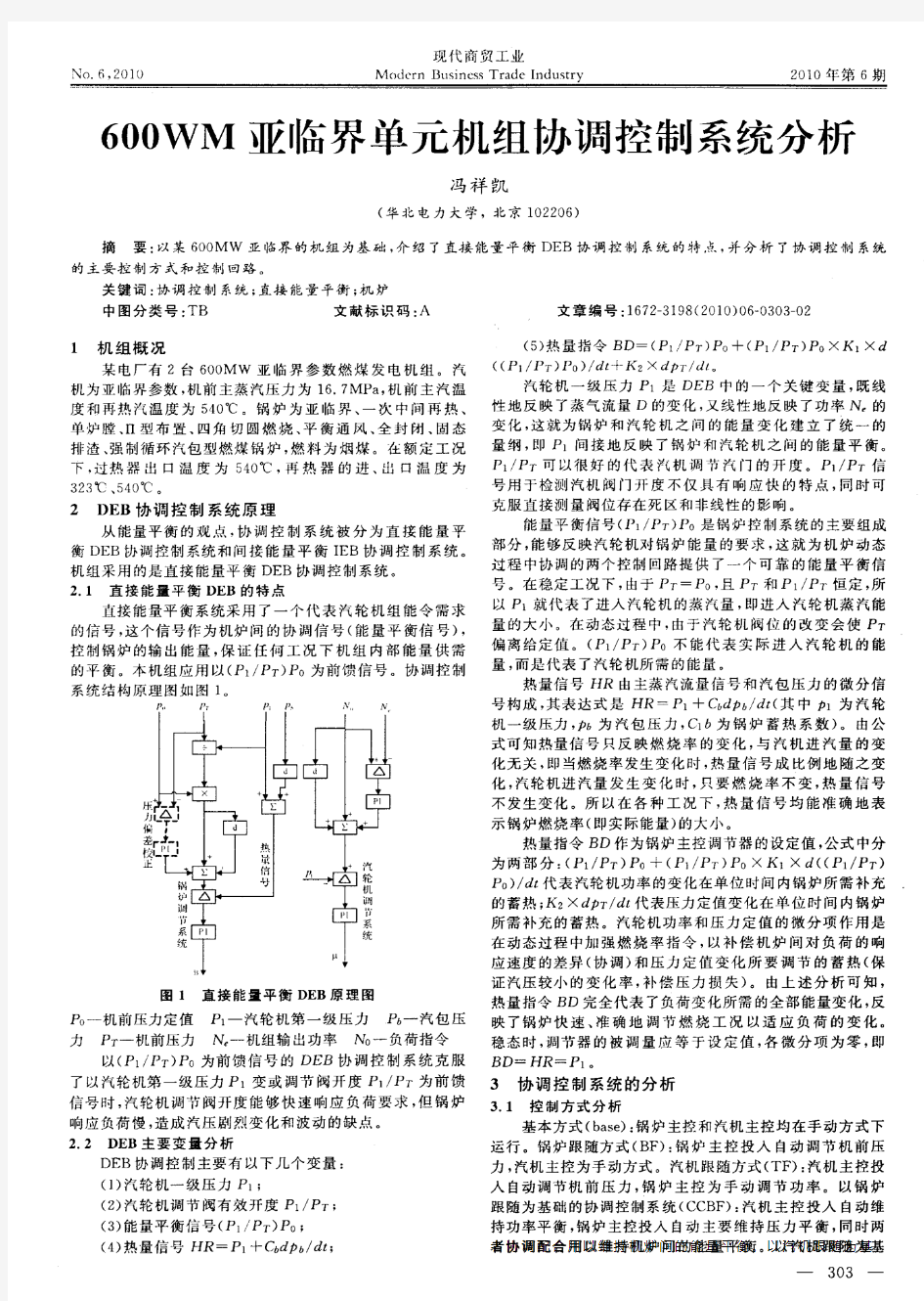
单元机组协调控制系统 第一节协调控制系统的基本概念 随着电力工业的发展,高参数、大容量的火力发电机组在电网中所占的比例越来越大。大容量机组的汽轮发电机和锅炉都是采用单元制运行方式。所谓单元制就是由一台汽轮发电机组和一台锅炉所组成的相对独立的系统。单元制运行方式与以往的母管制运行方式相比,机组的热力系统得到了简化,而且使蒸汽经过中间再热处理成为可能,从而提高了机组的热效率。 一、单元机组负荷控制的特点 随着大容量机组在电网中的比例不断增大,以及因电网用电结构变化引起的负荷峰谷差逐步加大,大容量单元机组的运行方式也逐步发生了变化,过去常常只带固定负荷的大机组,现在也需求根据电网中心调度所的负荷需求指令和电网的频率偏差参与电网的调峰、调频,甚至在机组的某些主要辅机局部故障的情况下,仍然维持机组的运行。 在单元制运行方式中,锅炉和汽轮发电机既要共同保障外部负荷要求,也要共同维持内部运行参数(主要是主蒸汽压力)稳定。单元机组输出的实际电功率与负荷要求是否一致,反映了机组与外部电网之间能量的供求平衡关系;而主蒸汽压力则反映了机组内部锅炉与汽轮发电机之间能量的供求平衡关系。然而,锅炉和汽轮发电机的动态特性存在着很大差异,即汽轮发电机对负荷请求响应快,锅炉对负荷请求的响应慢,所以单元机组内外两个能量供求平衡关系相互间受到制约,外部负荷响应性能与内部运行参数稳定性之间存在着固有的矛盾,这是单元机组负荷控制中的一个最为主要的特点。 二、协调控制系统及其任务 单元机组的协调控制系统(Coordinated Control Systen简称CCS)是根据单元机组的负荷控制特点,为解决负荷控制中的内外两个能量供求平衡关系而提出来的一种控制系统。从广义上讲,这是单元机组的负荷控制系统。它把锅炉和汽轮发电机作为一个整体进行综合控制,使其同时按照电网负荷需求指令和内部主要运行参数的偏差要求协调运行,即保证单元机组对外具有较快的功率响应和一定的调频能力,对内维持主蒸汽压力偏差在
柴油发电机组控系统工作原理 LIXISE 作者: 作者:LIXISE 柴油发电机组控制系统工作原理和算法是相当的复杂,每个电路的设计都有其特定的算法来予以实现。柴油发电机组的控制器系统犹如发电机组的心脏,智能控制系统的使用大大提高了柴油发电机组的运行,保障了柴油发电机组的稳定工作,那么控制系统是通过何种原理和算法来实现呢?柴油发电机组的控制部分,数字式励磁控制器较传统的模拟电路励磁控制器具有精度高,反应快,控制算法适应性强,对于不同特性的电机只要通过调整程序参数就能适应,甚至可以实现更高端的自适应智能控制算法等优点。 一、数字励磁控制器软件实现与算法研究 主要是对数字式励磁控制器的软件和所采用的控制算法进行论述。首先对数字励磁控制器的主程序进行设计,然后对电量参数采集算法和智能励磁控制算法进行研究,并在CPU上进行实现。为了实现精确的数字励磁控制,需要得到实时、精确的电量数据,而要获得实时、精确的电量数据,则需要采用交
流采样方法,并推导出交流采样下各个电量的计算公式,最终编写计算出电量数据的算法程序。交流采样是按一定的规律对被测信号的瞬时值进行采样,再按照一定的数学算法求出被测电量参数的测量方法。下面给出交流电压,交流电流,有功功率,无功功率,功率因素的各种算法中的离散公式。 二、数字式励磁控制器总体设计方案 工作电源:由于微处理器的工作电源要求,我们需要一个5V的稳定直流电源,信号调理电路的运算电路的供电需要一组±12V的直流电源,另外,开关量输出需要驱动继电器,所以需要一个+24V的直流电源,为此我们需要设计一个电源转化模块得到系统正常工作所需的三组DC电源。 三、交流采样锁相环电路 要进行交流采样,通常需要进行同步采样,目前交流采样方式主要有硬件同步采样、软件同步采样和异步采样三种。硬件同步由硬件同步电路向CPU提出中断实现同步。硬件同步电路有多种形式,常见的如锁相环同步电路等。硬件同步采样法是由专门的硬件电路产生同步于被测信号的采样脉冲。它能克服软件同步采样法存在截断误差等缺点,测量精度高。利用锁相频率跟踪原理实
目录 一绪论...................................................................................................................................... 二燃烧控制系统的设计 2.1燃烧过程控制任务 2.2燃烧过程调节量 2.3燃烧过程控制特点 三燃料控制系统 ........................................................................................................................ 3.1燃料调节系统...................................................................................................................... 3.2燃料调节——测量系统...................................................................................................... 3.3给煤机指令.......................................................................................................................... 四600MW火电机组DCS系统设计 4.1 电源部分 4.2 通信部分 4.3 系统接地 4.4 软件部分 五结论................................................................................................................................... 参考文献...................................................................................................................................
1引言 单元机组协调控制的任务是快速跟踪电网负荷的需要和保持主要运行参数的稳定。当电网负荷变动时,从汽轮机侧看,只要改变汽机调速汽门的开度,就能迅速改变进汽量,从而能立即适应负荷的需要。但锅炉即使马上调整燃料量和给水量,由于锅炉固有的惯性及迟延,不可能立即使提供给汽轮机的蒸汽量发生变化。如果汽轮机调汽门开度已改变,流入汽机的蒸汽量相应发生变化,那么此时只能利用主汽压力的改变来弥补或储蓄这个蒸汽量供需差额,此时,主汽压力将产生较大的波动。因此,提高机组负荷适应能力与保持主要参数稳定存在一定的矛盾。协调控制系统设计时将锅炉、汽轮机和发电机作为一个整体来考虑,使锅炉、汽机同时响应负荷要求,协调锅炉及其辅机与汽机的运行,以迅速、准确、稳定地响应负荷要求。 协调控制系统保证机组出力适应电网的负荷变化要求、维持机组稳定运行。具体地说就是对外保证单元机组有较快的功率响应和有一定的调频能力,对内保证主蒸汽压力偏差在允许范围内。协调控制系统是协调地控制锅炉燃料量、送风量、给水量等,以及汽机调节阀门开度,使机组既能适应电网负荷指令的要求,又能保持单元机组在额定参数下安全、经济地运行。单元机组协调控制系统可认为是一种二级递阶控制系统。处于上位级的机炉协调级,也叫作单元机组主控系统,是整个系统的核心部分。处于局部控制级的子系统包括锅炉以及汽机子控制系统。
2 协调控制系统任务与作用 2.1 协调控制系统 协调控制系统作用:保证机组出力适应电网的负荷变化要求、维持机组稳定运行。具体地说就是对外保证单元机组有较快的功率响应和有一定的调频能力,对内保证主蒸汽压力偏差在允许范围内。 协调控制系统任务:是协调地控制锅炉燃料量、送风量、给水量等,以及汽机调节阀门开度,使机组既能适应电网负荷指令的要求,又能保持单元机组在额定参数下安全、经济地运行 在单元机组中,锅炉和汽轮机是两个相对独立的设备,从机组负荷控制角度来看,单元机组是一个存在相互关联的多变量控制对象,经适当假设可以看作是一个具有的两个输入和两个输出的互相关联的被控对象,其方框图如图2.1所示。 图2.1 单元机组负荷控制对象原理方框图 μT- 通汽阀开度μB- 燃烧率水平NE-实发功率PT-主蒸汽压力 单元机组协调控制系统可认为是一种二级递阶控制系统。处于上位级的机炉协调级,也叫作单元机组主控系统,是整个系统的核心部分。处于局部控制级的子系统包括锅炉以及汽机子控制系统。子控制系统作用于负荷被控对象,如图2.2所示。 图2.2 单元机组协调控制系统简图
第七章单元机组协调控制系统 第一节协调控制系统的基本概念 随着电力工业的发展,高参数、大容量的火力发电机组在电网中所占的比例越来越大。大容量机组的汽轮发电机和锅炉都是采用单元制运行方式。所谓单元制就是由一台汽轮发电机组和一台锅炉所组成的相对独立的系统。单元制运行方式和以往的母管制运行方式相比,机组的热力系统得到了简化,而且使蒸汽经过中间再热处理成为可能,从而提高了机组的热效率。 一、单元机组负荷控制的特点 随着大容量机组在电网中的比例不断增大,以及因电网用电结构变化引起的负荷峰谷差逐步加大,大容量单元机组的运行方式也逐步发生了变化,过去常常只带固定负荷的大机组,现在也需求根据电网中心调度所的负荷需求指令和电网的频率偏差参和电网的调峰、调频,甚至在机组的某些主要辅机局部故障的情况下,仍然维持机组的运行。 在单元制运行方式中,锅炉和汽轮发电机既要共同保障外部负荷要求,也要共同维持内部运行参数(主要是主蒸汽压力)稳定。单元机组输出的实际电功率和负荷要求是否一致,反映了机组和外部电网之间能量的供求平衡关系;而主蒸汽压力则反映了机组内部锅炉和汽轮发电机之间能量的供求平衡关系。然而,锅炉和汽轮发电机的动态特性存在着很大差异,即汽轮发电机对负荷请求响应快,锅炉对负荷请求的响应慢,所以单元机组内外两个能量供求平衡关系相互间受到制约,外部负荷响应性能和内部运行参数稳定性之间存在着固有的矛盾,这是单元机组负荷控制中的一个最为主要的特点。 二、协调控制系统及其任务 单元机组的协调控制系统(Coordinated Control Systen简称CCS)是根据单元机组的负荷控制特点,为解决负荷控制中的内外两个能量供求平衡关系而提出来的一种控制系统。从广义上讲,这是单元机组的负荷控制系统。它把锅炉和汽轮发电机作为一个整体进行综合控制,使其同时按照电网负荷需求指令和内部主要运行参数的偏差要求协调运行,即保证单元机组对外具有较快的功率响应和一定的调频能力,对内维持主蒸汽压力偏差在
电气控制技术 课程设计 题目: 输煤机组控制系统 院系名称:电气工程学院 专业班级:电气F1206班 学生姓名: 学号: 指导教师:
目录 1 系统描述与控制要求 (1) 1.1 系统描述 (1) 1.2 控制要求 (1) 2 方案论证 (2) 2.1 PLC控制系统设计的原则和方法 (2) 2.2 系统的动作过程 (2) 2.3 系统各节点的时序图 (3) 3 硬件设计 (3) 3.1 系统原理方框图 (3) 3.2 主电路 (3) 3.3 I/O分配 (4) 3.3.1 输入口 (4) 3.3.2 输出口 (5) 3.4 I/O接线图 (6) 3.5 元器件选型 (7) 4 软件设计 (8) 4.1 主流程 (8) 4.2 梯形图 (9) 4.3 系统指令表 (13) 5 系统调试 (18) 设计心得 (20) 参考文献 (21)
1 系统描述与控制要求 1.1 系统描述 输煤机组控制示意图如下图示。输煤机组的拖动系统由6台三相异步电动机M1~M6和一台磁选料器YA组成。 图1.1 输煤机组控制示意图 SB1和SB2为自动开车/停车按钮,SB3为事故紧急停车按钮。HA为开车/停车时讯响器,提示在输煤机组附近的工作人员物煤机准备起动请注意安全。HL1~HL6为Ml~M6电动机运行指示,HL7为手动运行指示,HL8为紧急停车指示,HL9为系统运行正常指示,HL10为系统故障指示。警报电铃PB。 1.2 控制要求 具体要求如下: 1.正常启动,当按下启动按钮SB1后,讯响器HA峰鸣5秒,提醒在输煤机组附近的工作人员物煤机准备起动请注意安全。回收电机M6启动并点亮HL6指示灯;10秒后,2号送煤机M5启动并点亮HL5指示灯;10秒后,提升机M4启动并点亮HL4指示灯;10秒后,破碎机M3启动并点亮HL3指示灯;10秒后,1号送煤机M2启动并点亮HL2指示灯;10秒后,给料器电机M1和磁选料器YA启动并点亮HL1指示灯;10秒后,系统运行正常指示灯HL9点亮。输煤机组正常运行。 2.正常停车,按下停止按钮SB2后,讯响器HA峰鸣5秒,提醒在输煤机组附近的工作人员物煤机准备停车请注意安全。给料器电机M1和磁选料器YA停车并熄灭HL1指示灯,同时系统运行正常指示灯HL9熄灭。10秒后,1号送煤机
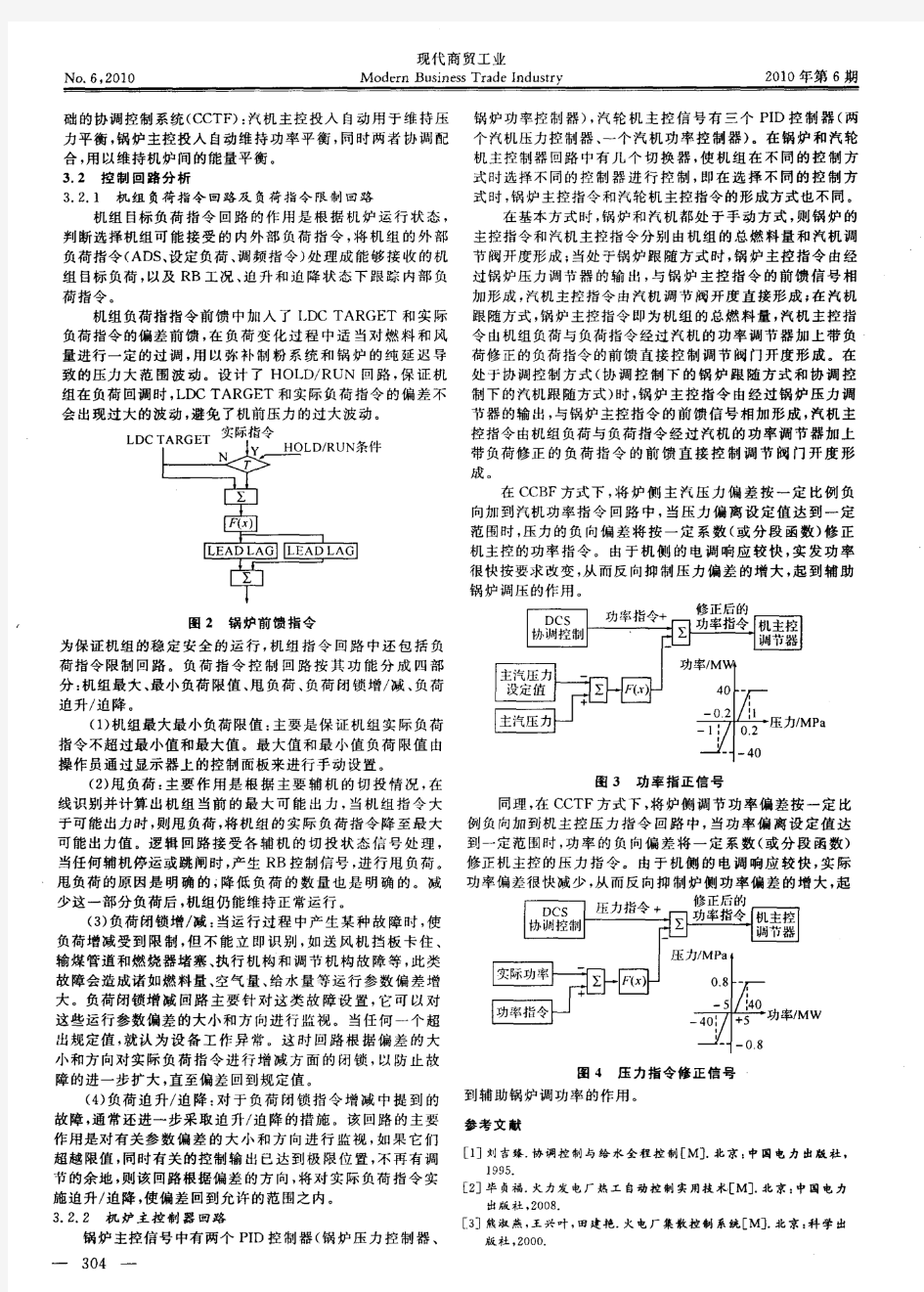
单元机组协调控制系统 概述 定义:锅炉和汽机相互配合接受外部负荷指令,共同适应电网对负荷的需求,并保 证机组本身安全运行的控制系统。 协调控制系统(CCS 是整个单元机组自动化系统的一个重要组成部分, CCS 与 FSSS DEH 等的联系如图所示:其组成如下。 手设 动 定 ADS 行政管理中心 逋 监视保护 系统 汽包水位 汽水取样 连续分析 I 示记录仪表音 亍响灯光报警 锅炉 及给水 控制 操 作 中 心 汽轮 发电机 控制 CCS PASS SSS TIS DEH MEH MARC 「级管理计算机 火焰 BTG CRT 控制室 机房
组成:主控制系统 锅炉的燃料控制系统 风量控制系统 给水控制系统和汽温控制系统汽机侧的数字功频电液控制 正常运行时,锅炉和汽机控制系统接受来自主控制系统的负荷指令。主控制系统是协调控制系统的核心部分,有时把主控制系统直接称为协调控制系统。协调控制系统的方框图如下: 主控系统 图1单元机组协调控制系统方框图 一、主控系统的组成 1、任务:(1)产生负荷控制指令 (2 )选择机组负荷控制方式 2、组成:负荷(功率)指令处理装置 机炉主控制器 二、负荷指令处理装置 (一)负荷指令运算回路 输入信号:机组值班员手动给定的负荷指令 ADS △ f 输出信号:机组负荷指令NN 负荷指令处理回路实例图 工作过程:运行人员输入T负荷率限止T上下限限止T机组负荷出力。
增减 (出力变化率限止) 图2负荷指令处理回路实例 (二) 机组最大可能出力运算回路 定义:考虑各种辅机的运行状况而计算出的机组出力。 机组最大可能出力运算回路原理图 (三) 机组的允许最大负荷运算回路 定义:考虑锅炉燃烧器等不可测故障时,使锅炉的实际出力达不到机组功率指令 N o 的要求,而设置的机组负荷运算回路,简称返航回路。 返航回路的工作过程: (1) 正常运行:N 允许=N 最大,4接通6 (2) 大于5%勺燃烧率,积分器 2的输出为机组允许最大负荷信号。运算过程示意图如 下: 运行人 员要求 负荷指 令 减 增 I I-PR-I
课程设计说明书 学生姓名:学号: 学院: 班级: 题目:300MW火电机组协调控制系统 指导老师: 2010年 12 月 23 日
1选题背景 1.1设计目的 通过本课程设计,使学生能较好的运用过程控制的基本概念、基础理论与方法,根据大型火电机组的生产实际,对火电机组的过程控制系统进行分析,设计出原理正确,功能较为全面的300MW火电机组协调控制系统。随着单元机组的发展,必须将汽轮机和锅炉作为一个整体进行控制,而机、炉的调节特性有相当大的差别,锅炉是一个热惯性大、反应很慢的调节对象,而汽轮机相对是一个惯性小、反应快的调节对象。因此要用协调控制系统,保证在满足负荷要求的同时,保持主要运行参数的稳定。 1.2设计内容和要求 (1)负荷指令管理部分 输入参数:外部负荷要求指令(就地指令,中调指令ADS,电网频率变化所要求负荷指令)。 输出参数:实际负荷指令错误!未找到引用源。,锅炉负荷指令。 负荷指令限制回路: a、最大/最小允许负荷限制回路 b、负荷返回回路(RB) 常用辅机:送风机、引风机、给水泵、发电机失磁、备用、规定返回速率 c、迫升/迫降回路(RUN UP/DOWN) d、闭锁增/减回路(BLOCK INCERASE/DECREASE) e、负荷快速切断回路(Fast Cut Back) 负荷操作: LMCC(负荷管理中心)面板:增、减负荷按钮:中、高、低速选择;速度限制(速率整定在3%-5%) (2)机炉负荷控制部分: 输入参数:第一级压力错误!未找到引用源。,机前压力错误!未找到引用源。、机前压力定值错误!未找到引用源。、锅炉负荷指令、实际负荷指令错误!未找到引用源。、频率偏差错误!未找到引用源。、实发功率错误!未找到引用源。 输出参数:锅炉指令、至DEH的负荷指令
气动控制系统设计 2007-08-23 11:43 气动控制系统设计 1、气动控制系统的组成。 在气动控制系统中,气动发生装置一般为空气压缩机,它将原动机供给的机械能转换为气体的压力能;气动执行元件则将压力能转化为机械能,完成规定动作;在这两部分之间,根据机械或设备工作循环运动的需求、按一定顺序将各种控制元件(压力控制阀、流量控制阀、方向控制阀和逻辑元件)、传感元件和气动辅件连接起来。 设计程序有关事项 2.1设计程序 2.1.1调研主机工作要求,明确设计依据。 A.了解主机结构、循环动作过程、执行元件操作力、运动速度及调整范围、运动平稳性、定位精度、传感器元件安装位置、信号转换、联锁要求、紧急停车、操作距离和自动化程度等。 B.工作环境,如温度及变化范围、湿度、振动、冲击、灰尘、腐蚀、防爆要求等。 C.是否要和电气、液压系统相配合,如需要须了解相应的安装位置等。 D.其他要求,如气控装置的重量、外形尺寸、价格要求等要求。 2.1.2气动回路设计 A.由执行元件数目、工作要求和循环动作过程,拟出执行元件的工作程序图。根据工作速度要求确定每一个气缸在一分钟内的动作次数。 B.根据元件的工作程序,参考各种气动基本回路,按程序控制回路设计方法,设计气动回路。 为了得到最合理的气动回路,设计时可做几种法案比较,如气控制,气-----电控制,射流控制方案等进行选择,绘出气动回路图,使用电磁阀的场合,同时还绘出电气回路图。 2.1.3执行元件选择和计算 气动执行元件的类型一般应与主机相协调,即直线往复运动应选择气缸,回转运动应选择气动马达,往复摆动应选择摆动缸。 2.1.4控制元件选择 根据系统或执行元件的工作压力和通过阀的最大流量,选用各生产厂制造的阀和气动元件。选择各种控制阀或逻辑元件时应考虑的特性有: 1工作压力 2额定流量 3响应速度 4使用温度范围 5最低工作压力和最低控制压力 6使用寿命 7空气泄漏量 8尺寸及联接形式 9电气特性等 选择控制阀时除了根据最大流量外,还应考虑最小稳定流量,以保证气缸稳定工作。
单元机组主控系统 Master Control System of Unit Plant 单元机组主控系统一般设置有四种运行方式:即汽轮机手动控制,锅炉手动控制的基本方式(BASE方式);以锅炉为基础的汽轮机跟随方式(TF方式);以汽轮机为基础的锅炉跟随方式(BF方式)和汽轮机一锅炉综合功率控制的协调控制方式(CCS方式)。四种运行方式之间的切换必须是平稳无扰动的。操作员可根据机组的运行情况进行选择。一般情况下,机组适宜在滑压控制方式和CCS方式下运行。事故工况时,则通常选择在TF方式和定压方式下运行。 The master control system of the unit plant generally provides four modes of operation, including the base mode of steam turbine manual control and boiler manual control; the boiler-based turbine following mode (TF mode); the steam turbine-based boiler following mode (BF mode), and the Coordinated Control System (CCS) mode of steam turbine-boiler integrated power control. Switching amongst the four modes must be smooth without disturbance. The operator may make choices based on the unit running conditions. Under normal circumstances, the unit is suitable to operate in the sliding pressure control mode and the CCS mode. In accident conditions, it will usually run in the TF mod and the constant pressure mode. 单元机组主控系统的前三种运行方式的根本区别在于对功率和主汽压力的控制处理上。在单元机组中,汽轮机进汽压力是反映机、炉能量平衡和机组运行稳定的重要指标。 The fundamental difference between the first three modes of the master control system of the unit plant lies in the control and treatment of power and main steam pressure. In the unit plant, the inlet steam pressure of the steam turbine is an important indicator to reflect energy balance of the unit and the furnace as well as the unit running stability. BF方式:汽轮机接受负荷指令,调节功率,能快速响应负荷要求;锅炉负责调节主汽压力,维持主汽压力的稳定,但由于锅炉动态响应慢,因此动态过程中主汽压波动大。特点:可以利用锅炉蓄热提高经济性,但主汽压波动大,影响机组的安全运行。 BF mode: the steam turbine accepts load demand, adjusts the power and is able to quickly respond to load requirements; the boiler is responsible for regulating the main steam pressure and maintaining the stability of the main steam pressure. However, the main steam pressure will greatly fluctuate in the dynamic process due to slow dynamic response of the boiler. Features: boiler heat storage can be taken advantage of to improve the economy, but great fluctuations of the main steam pressure will affect safe operation of the unit. TF方式:锅炉接受负荷指令,调节功率,满足负荷要求,汽轮机负责调节主汽压力,但锅炉动态响应慢,因此,负荷响应能力差。其特点:由于汽轮机负责调节主汽压力,因而主汽压力稳定,但会产生附加蓄热,机组经济性下降。 TF mode: the boiler accepts load demand, adjusts the power and meets the load requirements; the steam turbine is responsible for regulating the main steam pressure. However, the load response capacity is poor due to slow dynamic response of the boiler. Features: the main steam pressure is
1、 什么是单元机组? 锅炉直接向与其联系的汽轮机供汽,发电机与变压器直接联系,这种独立单元系统的机组称单元机组。 2、 单元机组运行的原则是什么? 在保证安全的前提下,尽可能的提高机组运行的安全性。 3、 什么是单元机组的启动和停运? 单元机组的启动是指从锅炉点火开始,经历升温升压、暖管,当锅炉出口蒸汽参数达到要求值时,对汽轮机冲转,将汽轮机转子由静止状态升速到额定转速,发电机并网并接带负荷的全部过程。停运过程要经历减负荷、降温降压、机组解列、锅炉熄火、汽轮机降速直至停转等全部过程。 4、 单元机组启动分类方式有哪些?各如何分类? ⑴按冲转时进汽方式分类①高中压缸启动②中压缸启动⑵按控制进汽量的阀门分类 ①用调节阀启动②用自动主汽阀或电动主闸阀的启动③用自动主汽阀或电动主闸阀的旁路阀启动⑶按启动前金属温度或停运时间分类 ①冷态启动②温态启动③热态启动④极热态启动⑷按蒸汽参数分类 ①额定参数启动②滑参数启动 5、 什么是额定参数启动?有何特点?机组从冲转到满负荷,自动主气门前的蒸汽参数保持不变的启动。特点:冲转参数高、热冲击大、节流损失大、对空排气。 6、 什么是滑参数启动?有何特点?滑参数启动方式有哪几种? 主气门前的蒸汽参数随机组的转速、负荷的升高而滑升。特点:工质和热量损失小、部件热冲击小、加热均匀。 ①真空法滑参数启动②压力法滑参数启动。 7、 单元机组滑参数冷态启动过程分几步完成? 启动前的准备和辅助设备及系统投运、锅炉点火升温升压和暖管、汽轮机冲转和升速、机组并网和接带负荷至负荷升至额定值。 8、 盘车预暖汽轮机有何优点? ⑴可避免转子材料的翠性断裂⑵可以缩短或取消中速暖机⑶盘车预暖汽轮机可在锅炉点火前用辅助气源进行,缩短机组启动时间,节约资源。 9、 在启动过程中如何保护锅炉水冷壁、过热器、再热器、省煤器和空气预热器? ⑴均匀、对称地投入燃烧器,各燃烧器定期轮换运行;加强水冷壁下联箱放水;下联箱采用蒸汽加热以强化循环。⑵控制过热器入口烟温;限制燃烧;调整火焰中心;喷水减温。再热器通过高
智能交通协调控制系统设计研究 发表时间:2019-06-03T10:24:09.490Z 来源:《防护工程》2019年第4期作者:顾昊沈玉杰 [导读] 缺乏信息的协同处理,且面对突发情况处理能力较弱。本文针对智能交通协调控制系统设计研究,对未来智能一体化交通控制有着一定的意义。 浙江浙大中控信息技术有限公司浙江杭州 310052 摘要:随着经济的不断发展,城市私家车日益增多,交通堵车,尤其是高峰时段的堵车已经成为社会关注的重要问题。现在衡量一个城市发展水平的重要指标就是城市的交通,能否使交通快速、安全、有序地运行是交通的头等问题。本文基于智能交通协调控制系统设计研究展开论述。 关键词:智能交通;协调控制;系统;设计 中图分类号:TP391 文献标识码:A 引言: 伴随着现代城市道路建设的发展和人均汽车拥有量的激增,道路拥堵现象越来越成为急需面对的问题。传统的交通控制方法通过使用交通信号灯、交通路况广播等形式进行交通控制,缺乏信息的协同处理,且面对突发情况处理能力较弱。本文针对智能交通协调控制系统设计研究,对未来智能一体化交通控制有着一定的意义。 1设计目标 面向大规模车流量的智能交通控制网络策略方案的设计关键是必须具有可用性、可靠性和可拓展性的特点(1)可用性:智能交通控制网络终端需要部署在各种交通路段,可以利用射频识别技术将交通信灯、视频监控系统等一系列系统进行组网。(2)可靠性:所设计的控制网络必须具有一定的突发处理的能力,可以在无人干预的情况下有效保障系统可靠的运行。系统设计应具有较强鲁棒性,来保证智能交通控制网络可以具有较长的使用寿命。(3)可扩展性:智能交通控制网络策略必须具有面向未来的拓展能力。系统必须具有较强的可移植性和功能性,可以灵活的进行配置。同时,系统还可以适应未来大规模交通流量的控制需求。 2系统设计 2.1功能设计 研究中在全面剖析了用户的直接需求后指出,本次设计主要包括路段的设置和最短路径的寻找功能。基于此,对比参照了其它道路规划系统,同时又探究总结了现实生活的实际问题,因而设计开发了系统的如下重点功能:路段的增除删改、路段连线的添加和取消、拥堵路段的查看、计算路段的距离和路径的规划。系统功能架构。 2.2数据库设计 数据库的设计原则可表述为:数据共享性、数据独立性、数据的完整性、灵活性,可在短时间内回答用户的复杂、且灵活多样的查询问题、安全性与保密性,对数据指定保护级别和安全控制。在智能交通管控平台的设计中,数据库中会进行各类信息存储,由于不同的管理系统对管理内容提出了具体要求,所以在数据库的设计过程中,需要对管理的信息内容进行考虑,数据库的设计是实现信息获取有效性的一种必要手段,通过利用数据库可以实现信息、资源的有效共享与及时更新,充分保证各项数据信息的时效性,不仅可以进一步强化交通管理,同时还可以进一步提高交通规划的决策力,从而有效缓解道路交通拥挤这一情况[3]。目前数据库设计中主要是包含了车辆基本信息表、阅读器记录表、车辆登记表、检测点交通流量表、路段交通流量信息表这些内容,而这些信息资料将就会被作为交通部门开展各项工作的重要参考依据。具体的设计内容如下:(1)车辆公司在该系统中,系统会对不同的车辆信息建设独立编号,在车辆公司进行信息填写时,系统会将该编号作为用户名,通过信息比对导出该公司的评级(level)、运营状态(status)、所属区域(area)等信息,对于评级属性,设置为枚举类型,运营状态为数据类型,可以选择为0和1,其中1代表停止运营。(2)车辆信息管理部门该系统数据库的设计可选内容为车辆牌照类型、车辆类型,需要填写的内容为车辆所有人或所属企业。(3)渣土车和混凝土罐车在该数据库的设计中,需要能够表述各类信息,由通行证申请者进行填写,根据系统中的信息进行审批结果显示。(4)校车和公交车这两种车辆的主要信息为车辆的行进路线进行管理,同时也需要涵盖车辆所有者和驾驶者信息。 2.3车辆信息管理系统设计 在车辆信息管理系统设计中,核心设计内容与上文相似,在系统中都应用以上编程语言,让系统能够正常运行,但是这些不同种类的车辆,对信息管理有不同的要求,对于渣土车和混凝土罐车来说,Controller类需要添加的功能为通行证申请的进度查询,Service类添加的功能为通行证申请。对于校车和公交车来说,由于需要严格按照规定路线行进,并要有报警功能,所以Controller类的功能为实时处理用户的报警信息,而Service类的功能为进行车辆实际轨迹与规定轨迹间的比对工作。 2.4概念设计 实体-联系图(EntityRelationshipDiagram,E-R图),提供了表示实体型、属性和联系的方法,用来描述现实世界的概念模型。E-R图是表示概念模型的一种方式,构成E-R图的基本要素是实体型、属性和联系。其中,实体型(Entity)用矩形表示,矩形框内写明实体名;属性(Attribute)用椭圆形表示,并用无向边将其与相应的实体连接起来;联系(Relationship)用菱形表示,菱形框内写明联系名,并用无向边分别与有关实体连接起来。根据交通流的概念,研究可得本系统节点表的E-R图。 3系统实现 3.1操作运行步骤 打开本系统,在用户点击载入地图后,将会进行地图的初始化。一般情况下,地图加载都是先加载界面的布局,而后则是地图和定位信息的初始化,对节点信息进行查找和添加,此后再进行图层的初始化。用户可在地图上选择出发地和目的地,当用户点击后,通过接口把程序发送到服务器或用户主机上。进行分析判断,结合拥堵状况后,返回结果。在输出设备上显示最优路径的规划结果。 3.2车辆数据分析 利用电子车牌识别法统计经过车辆数,选取近66天九路口经过车辆进行数据分析。运用数理统计学计算周围八路口对中心路口车辆数
东北大学 研究生考试试卷 评 分 考试科目:控制系统设计 课程编号:y2014607202 阅卷人:王明顺 考试日期:2015.05.21 姓名:马文彬 学号:1470739 注意事项 1.考前研究生将上述项目填写清楚 2.字迹要清楚,保持卷面清洁 3.交卷时请将本试卷和题签一起上交 东北大学研究生院
目录 摘要......................................................................................................................................................I 第1章绪论 (1) 1.1SMPT-1000系统介绍 (1) 1.1.1立体流程设备盘台 (2) 1.1.2钢制盘台 (2) 1.2上位机软件 (3) 1.2.1上位机软件SMPTLAB (3) 1.2.2实时仿真引擎软件SMPTRuntime (4) 第2章加热炉工艺流程与燃烧因素分析 (4) 2.1加热炉工艺流程 (5) 2.2燃烧控制要求 (6) 第3章炉膛燃烧控制器系统设计 (7) 3.1设计原理 (7) 3.1.1比值控制系统 (7) 3.1.2开环定比值控制系统 (8) 3.1.3单闭环定比值控制系统 (9) 3.1.4双闭环比值控制系统 (10) 3.2随动控制系统的控制器参数整定 (11) 第4章控制系统的控制器参数整定 (12) 4.1控制系统的控制器参数整定设计实验设计 (12) 4.1.1准备工作 (12) 4.1.2实验步骤 (12) 4.2控制系统的控制器参数整定实验操作 (12) 4.2.1比值控制器K值的确定 (12) 4.2.2主物料控制器PID参数的整定 (14) 4.2.1副物料控制器PID参数的整定 (15) 结论 (17) 参考文献 (18)
思考:主控制系 统、机炉调节系 统、协调控制系 统的相互关系 第十章单元机组主控制系统 The Unit Master Control System 通过本章的学习要求理解主控制系统、 机炉调节系统、协调控制系统概念及相互关系; 掌握主控系统调节对象的动态特性;掌握单元制机组负荷控制的几种基本方式;掌握前馈控 制的多种应用方案及工作原理;理解滑压运行机组的协调控制方案;能分析常见的协调控制 方案;掌握负荷指令处理部分的作用;掌握正常工况或异常工况下对负荷指令采取的处理措 施:掌握几个基本概念:负荷返回、负荷快速切段、负荷闭锁增/减、负荷迫升/迫降;看懂 一个较完整的单元机组主控制系统的实例。 本章重点:1、负荷控制的几种基本方式 2、前馈控制的多种应用方案及工作原理 3、负荷指令处理部分的作用 4、负荷返回、负荷快速切段、负荷闭锁增/减、负荷迫升/迫降的概念 本章难点:1、两种非线性环节的工作原理及作用 2、分析常见的协调控制方案 3、负荷闭锁增/减、负荷迫升/迫降两种措施的区别 第一节概述 Overview 一、 单元机组主控制系统的概念 大型机组负荷控制的首要任务:保证机组出力适应电网的负荷变化要求、维持机组 稳定运行。 具体地说就是对外保证单元机组有较快的功率响应和有一定的调频能力,对 内保证主蒸汽压力偏差在允许范围内。 主控制系统(The unit master control system )作用: 接受外部负荷要求指令,并发出使机炉调节系统协调动作的指挥信号,称其也称负 荷自动控制系统(the unit load control system )。 主控系统向机炉调节系统发出的指挥信号分别称为汽轮机主控制指令M t 和锅炉主 控制指令I 机、炉主控制指令齔M b 分别代表了汽轮机调门开度(或汽轮机功率)指 令和锅炉燃烧率(及相应的给水流量)指令。 二、主控系统与机、炉调节系统的关系 主控制系统相省于机炉调节系统的指挥机构,起上位控制作用;机炉调节系统对于 主控制系统相省于伺服机构,起下位控制的作用,是主控制系统的基础,两者构成分层 控制的结构。 协调控制系统:主控制系统和锅炉、汽轮机各自的调节系统的总称。 协调控制系统的基本结构如图10-1所示。 N 0—实际负荷指令(即功率给定值);