第42卷 第12期2008年12月
西 安 交 通 大 学 学 报
J OU RNAL O F XI′AN J IAO TON G U N IV ERSIT Y
Vol.42 №12
Dec.2008
利用姿态约束的并联机器人运动学标定方法
任晓栋1,2,冯祖仁1,2,苏承平1,2
(1.西安交通大学系统工程研究所,710049,西安;2.西安交通大学机械制造系统工程国家重点实验室,710049,西安)
摘要:为了提高并联机器人运动精度,提出了一种利用姿态约束的运动学标定方法.借助一个双轴倾角仪,建立了机器人末端2个姿态角恒定约束,根据这种约束构造了相应的辨识模型和标定算法.标定算法得益于倾角仪重复精度和分辨率高于位置精度的特点,不受其位置精度和量程的限制,同时可避免施加机械约束给并联机器人主动关节带来特殊要求.仿真计算表明,在杆长测量精度为2μm、倾角仪重复精度为01001°的条件下,经过标定后并联机器人的位置精度可达011mm,姿态精度可达0101°.
关键词:姿态约束;运动学标定;并联机器人
中图分类号:TP24212 文献标志码:A 文章编号:02532987X(2008)1221445205
Method for Kinematic C alibration of Parallel Robots Using
Orientation Constraint
REN Xiaodong1,2,FEN G Zuren1,2,SU Chengping1,2
(1.Systems Engineering Institute,Xi′an Jiaotong University,Xi′an710049,China;2.State Key Laboratory of
Manufacturing Systems Engineering,Xi′an Jiaotong University,Xi′an710049,China)
Abstract:A new calibration met hod using orientation constraint is p resented to improve t he accu2 racy of parallel robot s.Wit h t he use of a commercial biaxial inclinometer,two attit ude angles of t he end2effecter are kept constant at different measurement configurations.The corresponding calibration algorit hm is built t hrough t he orientation constraint.Instead of positioning accuracy, repeatability and resolution of t he inclinometer are used to const ruct t he orientation const raint, and t he measurement range of t he inclinometer has no effect on t he calibration met hod.Moreo2 ver,t he act uators of t he parallel robot s do not need to operate in passive mod because t he orienta2 tion const raint is not const ructed by t he mechanical locking device.Simulation result s show t hat t he po sition accuracy and t he orientation accuracy reach0.1mm and0101°,respectively,wit h measurement p recision on leg lengt hs of2μm and repeatability on inclinometer of01001°.
K eyw ords:orientation const raint;kinematic calibration;parallel robot s
精度是评价并联机器人工作性能的一项重要指标.运动学标定通过准确辨识机器人的机构参数来修正控制器中的模型参数,能够在不增加并联机器人制造成本的条件下,有效提高运动精度.
现有的并联机器人运动学标定方法可以分为外部标定法和自标定法2大类.外部标定法需要借助外部传感器直接或者间接地检测末端位姿信息全集[1]或者子集[224].这类方法原理简单,但要获取高精度的位姿信息非常困难,通常需要借助代价昂贵的检测设备.自标定方法则无需检测末端位姿信息,通常根据机器人内部冗余传感器的输出[5]或者利用由机械装置产生的运动约束来构造相应的辨识模型[627],但缺点是内部传感器的安装无法适用于已经建造的机构,而施加机械约束通常需要机器人的主
收稿日期:2008204221. 作者简介:任晓栋(1979-),男,博士生;冯祖仁(联系人),男,教授,博士生导师. 基金项目:国家重点基础研究发展规划资助项目(2007CB311006);国家高技术研究发展计划资助项目(2006AA04Z222).
动关节能够以被动模式工作.尽管如此,自标定方法的测量简单、代价小、易于实现在线精度补偿等优点,仍吸引了众多学者在这一领域不断深入研究和拓展[829].
本文在基于运动约束的标定方法研究基础上,利用双轴倾角仪建立了并联机器人末端2个姿态角恒定约束.据此约束,构造了相应的辨识模型和标定算法,分析了测量精度对标定结果的影响,并进行了仿真验证.
1 标定方法描述
111 原理概述
利用姿态约束的并联机器人运动学标定方法,其基本思想是:在选择的各测量位形处,借助安装在机器人运动平台上的双轴倾角仪,使运动平台坐标系相对于固定平台坐标系x轴、y轴的旋转角保持不变.根据这一不变约束,利用最小二乘原理建立机构参数辨识模型,并采用非线性优化方法求解.
值得一提的是,本文方法中的双轴倾角仪,并非是用来进行精确倾角测量的,而是作为指示器来判别不同测量位形下运动平台的2个姿态角是否保持恒定.文献[3]曾提出利用2个倾角仪直接测量并联机器人运动平台相对于大地水平面的倾斜角,并根据测量值与模型计算值之间的残差来建立辨识模型.这种方法为了获得良好的标定效果,要求倾角仪在具有较高位置精度的同时还应具有较大的量程.对于一般商用倾角仪,检测精度越高,则测量范围越小,即位置精度高与量程大不可兼得.本文提出的标定方法,影响标定结果的不是倾角仪的位置精度,而是重复精度和分辨率,且标定结果不受测量范围的影响.此外,由于姿态角恒定约束并不依靠机械锁定装置来实现,因此并联机器人的末端自由度不受损失,也不要求主动关节能够以被动模式工作.
112 可辨识的机构参数
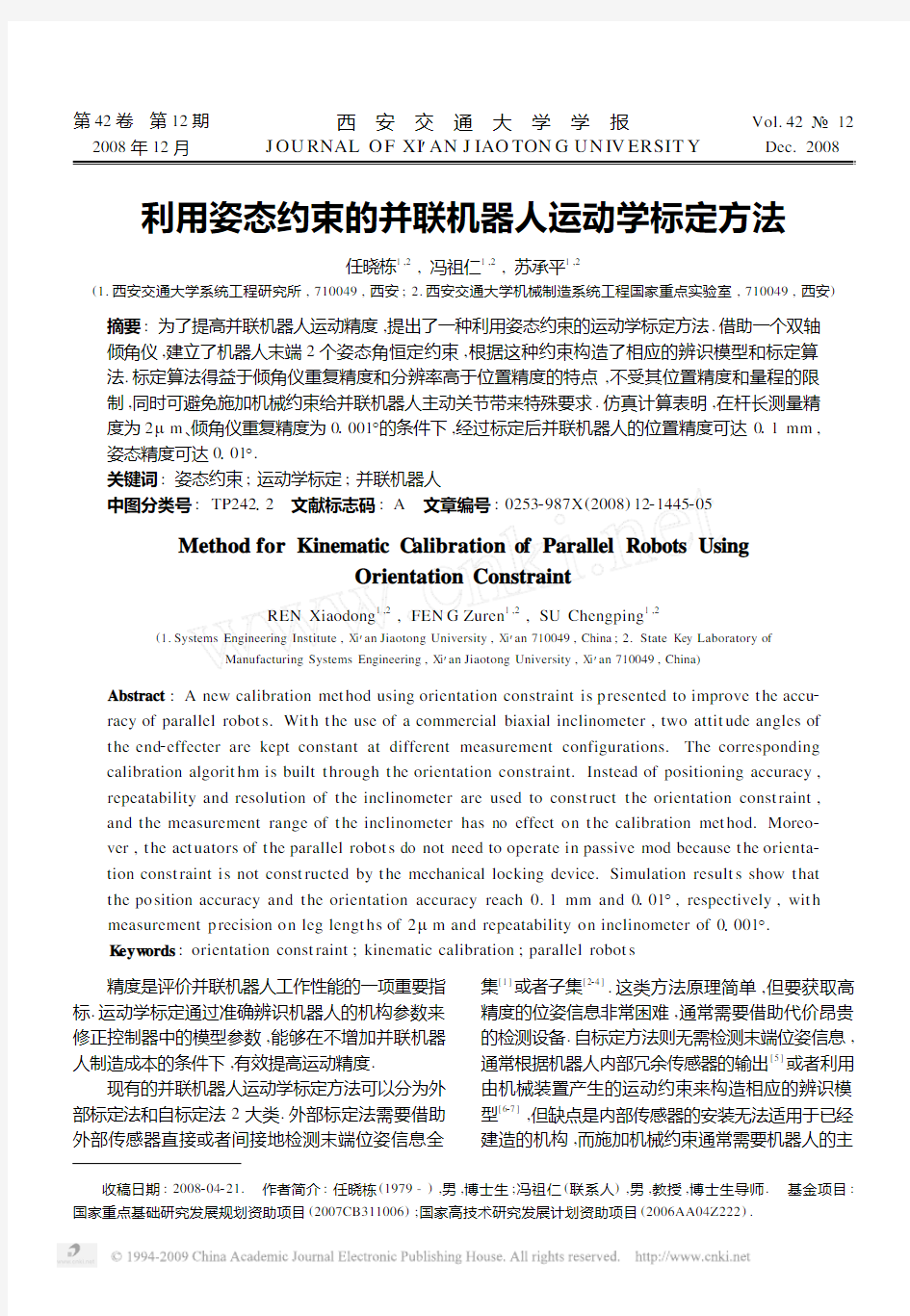
在不失一般性的情况下,本文以自行设计开发的6自由度并联机器人X J2H EXAS为例,来分析利用姿态约束的运动学标定方法.X J2H EXAS如图1所示,它采用Stewart平台结构,由6根可伸缩的驱动杆以并行方式通过虎克铰关节连接活动的上平台和固定的下平台.依据通用的简化运动学模型, Stewart平台式并联机器人的机构参数通常指的是,上平台虎克铰(或球铰)关节的中心点在运动平台坐标系下的坐标、下平台虎克铰关节中心点在固定平台坐标系下的坐标及6根伸缩杆的固定杆长偏差,共计42个参数
.
图1 并联机器人X J2H EXAS及其坐标系
由于各种标定方法建立的辨识模型有所不同,所以并非所有的机构参数都具有可辨识性.本文方法从实际物理意义出发分析了机构参数的可辨识性,即假设运动平台坐标系和固定平台坐标系发生平移和旋转变换,以新生成的运动平台坐标系相对于新的固定平台坐标系能否使2个姿态角保持恒定来确定可以辨识的机构参数并建立适当的运动平台坐标系和固定平台坐标系.本文坐标系如图1所示,构建方式描述如下.
(1)运动平台坐标系:以M1点为原点,x M轴经过M2点,x M y M平面由M1、M2、M6点确定.
(2)固定平台坐标系:以B1点为原点,x B y B平面垂直于重力方向,B2点在x B y B平面内的投影点与B1点连线构成x B轴.
根据构建的运动平台坐标系{M1}和固定平台坐标系{B1},机构参数x M
1
、y M
1
、z M
1
、y M
2
、z M
2
、z M
6
、
x B
1
、y B
1
、z B
1
、y B
2
为0,所以可辨识的机构参数为32个.
113 标定算法
令x=(x y zαβγ)T表示运动平台的位姿向量,其中x、y、z为运动平台坐标系原点在固定平台坐标系中的位置坐标,α、β、γ分别为运动平台坐标系绕固定平台坐标系x B、y B、z B轴旋转的角度.设并联机器人运动学正解的一般形式为
x=F(l,η)(1)式中:l是杆长伸缩值向量;η是机构参数向量.
将α和β作为建立不变约束的2个姿态角,则有
α=fα(l,η)
β=fβ(l,η)
(2)
将所选择的测量位形分为s组,每组t个,其中s,t∈N且s,t≥2.对于每组位形,建立如下约束
6441西 安 交 通 大 学 学 报 第42卷
αi ,j =αi ,j +1
βi ,j =βi ,j +1
(3)
式中:i =1,2,…,s;j =1,2,…,t -1.
在每个位形处通过测量可以得到杆长伸缩向量.构造残差向量
C =[C T
α1…C T
αs C T
β1…C T
βs
]T
(4)
式中
C αi
=C
1
αi
C 2αi
…
C t-1
αi
=
αi ,2-αi ,1
αi ,3-αi ,2…αi ,t -αi
,t-1C βi
=C 1βi
C 2βi
…
C t-1
βi
=
βi ,2-βi ,1βi ,3-βi ,2…βi ,t -βi ,t-1
对于真实的机构参数向量ηr ,有
‖C ‖=0
(5)
然而,由于机构参数误差的存在,式(5)通常并不成立,因此需考虑用非线性最小二乘技术求解真实的机构参数.定义代价函数
C cost =‖C ‖=
∑s
i =1∑
t
j =2
[(αi ,j
-αi ,j -1)
2
+(βi ,j -βi ,j -1)2
]
(6)
这样,可将机构参数辨识问题归结为调节η使得
C cost 最小的非线性最小二乘优化问题,再采用Lev 2
enberg 2Marquardt 算法求解.114 测量精度的影响
考虑杆长测量精度和倾角仪重复精度对标定结果的影响,姿态约束应为f α(l i ,j +ΔL i ,j ,η)+Δαi ,j =f α(l i ,j +1+ΔL i ,j +1,η)f β(l i ,j +ΔL i ,j ,η)+Δβi ,j =f β(l i ,j +1+ΔL i ,j +1,η
)(7)
式中:ΔL i ,j 、ΔL i ,j +1为杆长伸缩值的测量误差;Δαi ,j 、
Δβi ,j 表示倾角仪重复精度.
令ηn 为机构参数名义值向量,Δ
η为机构参数真实值与名义值之间的差值向量,并将f α和f β分
别在(l i ,j ,ηn )、(l i ,j +1,ηn )处做一阶近似,则有下述式(8),式中的
5f α5l 、5f α5η、5f β5l 、5f β
5η
分别为姿态角α和β对杆长向量和机构参数向量的导数,可以通过数值方法求解.
由式(8)可以看出,在同组的相邻2个测量位形之间,姿态倾角的差异由3个因素造成,即杆长伸缩
f α(l i ,j +1,ηn )-f α(l i ,j ,ηn )=
5f α(l i ,j ,ηn )5l
T
ΔL i ,j
-5f α(l i ,j +1,ηn )5l
T
ΔL i ,j +1+5f α(l i ,j ,ηn )5η
T
-5f α(l i ,j +1,ηn )5ηT
Δη+Δαi ,j
f β(l i ,j +1,ηn )-f β(l i ,j ,ηn )=
5f β(l i ,j ,ηn )5l T ΔL i ,j -5f β(l i ,j +1,ηn )5l T
ΔL i ,j +1+
5f β(l i ,j ,ηn )5ηT -5f β(l i ,j +1,ηn )5η
T
Δη+Δβi ,j
(8)
值的测量误差、倾角仪重复性误差和机构参数偏差.
可以从2个方面来考虑减小这2种测量误差的影响:提高杆长测量精度和倾角仪重复精度;优化选取测量位形,目的是减小测量误差的放大倍数.115 测量步骤
利用姿态约束标定方法无需获得并联机器人末端位姿信息,仅需检测各测量位形下的杆长变化量,其完整的测量步骤如下所述.
(1)将双轴倾角仪安装在运动平台上,移动运动平台至某一测量位形处,调节位姿,使倾角仪读数为0,再利用安装在主动关节上的传感器精确测量6个杆长的变化量.
(2)重复步骤(1),直至获得所需的同组位形.(3)在倾角仪和运动平台之间加装斜块,改变倾角仪的安装姿态.
(4)重复步骤(1)~步骤(3),直至获得满足要求的测量位形.
在上述测量步骤中,不断改变倾角仪的安装姿态是为了增加测量位形之间的差异,减小辨识雅可比矩阵的条件数,从而获得更好的标定结果.
2 仿真结果
以并联机器人X J 2H EXAS 的设计参数作为机构参数的名义值,在其上叠加随机分布于区间[-5mm ,5mm ]的误差作为机构参数的真实值,名义值和真实值如表1和表2所示.在标定前,由机构参数误差导致的并联机器人末端位置误差为9mm ,姿态误差为018°.211 不考虑噪声的标定结果
若不考虑杆长测量噪声和倾角仪重复精度的影响,选择40个测量位形,并采用本文方法进行标定,结果是:机构参数的辨识精度为10-10m ,辨识出的机构参数与真实值的偏差如表3所示.
7
441 第12期 任晓栋,等:利用姿态约束的并联机器人运动学标定方法
表1 Stewart平台机构参数名义值m
伸缩杆
编号
123456
x M
i
010000017687018255014412013275-010568
y M
i
010000010000010984017642017642010984
z M
i
010000010000010000010000010000010000
x B
i
010000011504016283015531-014027-014779
y B
i
010000010000018278019580019580018278
z B
i
010000010000010000010000010000010000
Δl
i112000112000112000112000112000112000 表2 Stewart平台机构参数真实值m 伸缩杆
编号
123456
x M
i 010000017637018295014436013233-
010587
y M
i
010000010000010993017672017612010964
z M
i
010000010000010020010050-010*********
x B
i
010000011543016233015506-014068-014761
y B
i
010000010000018256019599019549018251
z B
i
010*********-010050010030010049010040
Δl
i112037111981112050111963112026111969
仿真计算中将40个测量位形分为10组,每组
中的4个测量位形满足式(3)约束.这些测量位形的
构造如下:位置参数均匀分布在并联机器人的工作
空间内,α和β姿态角在±20°范围内等间隔分布,γ
在同样的范围内均匀分布.标定方法中用到的杆长
测量值,由机构参数真实值和各测量位形下的位姿
参数通过运动学逆解计算获得.
212 考虑噪声的标定结果
为更好地模拟真实的标定环境,需要考虑杆长
测量噪声和倾角仪重复精度对标定结果的影响.假
设杆长的测量精度εL为2μm、20μm,杆长测量噪声是以零均值、幅值为εL/2的均匀分布的随机噪声来模拟;倾角仪的重复精度εR为0101°、01001°,重复精度对标定方法的影响是以零均值、幅值为εR/2的均匀分布的随机噪声来模拟.分别选取40、60、80个测量值来研究测量位形数目变化对标定结果的影响.与211节类似,将这些位形分为10、15、20组,每组中的4个测量位形满足式(3)约束.
在并联机器人工作空间中随机选择200个位形
来测试标定结果,这些位形在标定过程中没有使用过.图2给出了经本文方法标定后机器人位置误差、姿态误差的无穷范数最大值.从图2可以看出,提高杆长测量精度和倾角仪重复精度可有效改善标定结
图2 经标定后并联机器人的位姿误差
表3 无噪声条件下Stewart平台机构参数辨识结果与真实值的偏差m 伸缩杆
编号
123456
x M
i
010000
-316×
10-11
-117×
10-10
-113×
10-10
-616×
10-11
-117×
10-10
y M
i
010*********
113×
10-10
111×
10-10
-311×
10-11
117×
10-10
z M
i
010*********
611×
10-10
312×
10-10
-214×
10-10
010000
x B
i
010000
-316×
10-11
315×
10-10
-317×
10-10
-218×
10-10
-314×
10-10
y B
i
010*********
711×
10-10
211×
10-10
-919×
10-11
-817×
10-11
z B
i
010000
-616×
10-12
-719×
10-10
110×
10-11
-213×
10-11
118×
10-10
Δl
i
-118×
10-11
-512×
10-11
-816×
10-11
-515×
10-11
-111×
10-11
-214×
10-10果.当选用80个测量位形,εR=01001°且εL=2μm 时,经过标定后并联机器人的位置误差可减小至011mm,姿态误差可减小至0101°.此外,测量位形的增加也可以在一定程度上改善标定结果,但是效果有限.
图3给出了假定倾角仪位置精度和重复精度均为01001°且杆长测量精度为20μm,本文方法与文献[3]方法的标定结果,可以看出两者较为接近.然而,考虑到实际测量中倾角仪的重复精度要高于位置精度,则本文方法的标定结果优于文献[3]方法.
8441西 安 交 通 大 学 学 报 第42卷
图3 相同条件下2种标定方法结果比较
3 结 论
为寻求一种代价小、简单有效的方式以提高并联机器人运动精度,提出了利用双轴倾角仪来建立机器人末端2个姿态角的恒定约束,并据此约束构造辨识模型的标定方法.倾角仪无需进行精确的角度测量,所以影响标定结果的是其重复精度和分辨率,标定方法也不受倾角仪测量范围的限制.由于避免了使用机械锁定装置来建立约束,因此本文方法对机器人主动关节没有特殊要求,亦即适用于各类并联机构,同时仿真计算验证了所提方法的有效性.进一步的研究将主要针对测量位形的优化选取及快速有效的伺服调节.
参考文献:
[1] RENAUD P,ANDREFF N,MARQU ET F.Vision2
based kinematic calibration of H4parallel mechanism
[C]∥Proceedings of International Conference on Ro2
botics and Automation.Piscataway,NJ,USA:
IEEE,2003:119121196.
[2] RAU F A,PERV EZ A,R YU J.Experimental results
on kinematic calibration of parallel manipulators using
a partial pose measurement device[J].IEEE Transac2
tions on Robotics,2006,22(2):3792384.[3] B ESNARD S,KHA IL W.Calibration of parallel ro2
bots using two inclinometers[C]∥Proceedings of In2 ternational Conference on Robotics and Automation.
Piscataway,NJ,USA:IEEE,1999:175821763. [4] 高猛,李铁民,唐晓强.少自由度并联机床标定试验研
究[J].机械工程学报,2003,39(9):1182122.
GAO Meng,L I Tiemin,TAN G Xiaoqiang.Calibra2 tion experiment research of parallel kinematics machine
with a few degrees[J].Chinese Journal of Mechanical
Engineering,2003,39(9):1182122.
[5] ZHUAN G Hanqi,L IU Lixin.Self2calibration of a
class of parallel manipulators[C]∥Proceedings of In2 ternational Conference on Robotics and Automation.
Piscataway,NJ,USA:IEEE,1996:9942999.
[6] KHAL IL W,B ESNARD S.Self calibration of Stew2
art2G ough parallel robots without extra sensors[J].
IEEE Transactions on Robotics and Automation,
1999,15(6):111621121.
[7] RAU F A,R YU J.Fully autonomous calibration of
parallel manipulators by imposing position constraint
[C]∥Proceedings of International Conference on Ro2
botics and Automation.Piscataway,NJ,USA:
IEEE,2001:238922394.
[8] B ESNARD S,KHAL IL W.Identifiable parameters
for parallel robots kinematic calibration[C]∥Proceed2 ings of International Conference on Robotics and Auto2 mation.Piscataway,NJ,USA:IEEE,2001:28592 2866.
[9] SOONS J A.On the geometric and thermal error of a
hexapod machine tool[C]∥Proceedings of USA2
Europe Forum on Parallel Kinematic Machines.Ber2 lin,G ermany:Springer2Verlag,1999:1512169.
(编辑 苗凌)
(上接第1444页)
[7] Varshney P K.Distributed detection and data fusion
[M].Berlin,G ermany:Springer2Verlag,1996. [8] Viswanathan R,Varshney P K.Distributed detection
with multiple sensors I:fundamentals[J].Proceedings of the IEEE,1997,85(1):54263.
(编辑 苗凌)
9441
第12期 任晓栋,等:利用姿态约束的并联机器人运动学标定方法
工业机器人运动学标定及误差分析 运动学标定是机器人离线编程技术实用化的关键技术之一,也是机器人学的重要内容,在机器人产业化的背景下有十分重要的理论和现实意义。机器人运动学标定以运动学建模为基础,几何误差参数辨识为目的,为机器人的误差补 偿提供依据。工业机器人在以示教方式工作时,以重复精度为主要指标;在以离 线编程方式工作时,主要工作指标变为绝对精度。但是,工业机器人重复精度较 高而绝对精度较低,难以满足离线编程工作时的精度,所以需要进行运动学标定 来提高其绝对精度。随着机器人离线编程系统的发展,工业机器人运动学标定日益重要。本文首先综合分析了工业机器人运动学标定的一些基本理论,为之后的运动学建模和标定提供理论基础。根据ABB IRB140机器人实际结构,本文建立 了D-H运动学模型,并讨论了机器人的正运动学问题和逆运动学问题的解;然后 指出了该模型在标定中存在的缺陷,结合一种修正后的D-H模型建立了本文用于标定的模型。并根据最终建立的运动学模型建立了机器人几何误差模型。本文 还在应用代数法求解机器人逆运动学问题的基础上,进行了应用径向基神经网络求解机器人逆解的研究。该方法结合机器人正运动学模型,以机器人正解为训练样本训练经遗传算法优化后的径向基神经网络(GA-RBF网络),实现从机器人工 作变量空间到关节变量空间的非线性映射,从而避免复杂的公式推导和计算。本文在讨论了两种构造机器人封闭运动链进行运动学标定的方法的基础上,提出了一种新的机器人运动学标定方法——虚拟封闭运动链标定法。并对该方法的原理、系统构成进行了详细的分析和说明。该方法通过一道激光束将末端位置误 差放大在观测平板上,能够获得更高精度的关节角的值,从而辨识出更为准确的 几何参数。为了验证本文提出的虚拟封闭运动链标定方法的有效性和稳定性,本文以ABB IRB140机器人为研究对象,利用有关数据进行了仿真分析,最终进行了标定试验,得出结论。 同主题文章 [1]. 王金友. 中国工业机器人还有机会吗?' [J]. 机器人技术与应用. 2005.(02) [2]. 李如松. 工业机器人的应用现状与展望' [J]. 组合机床与自动化加工技术. 1994.(04) [3]. 赖维德. 工业机器人知识讲座——第一讲什么是工业机器人' [J]. 机械工人.冷加工. 1995.(02) [4]. 世界工业机器人产业发展动向' [J]. 今日科技. 2001.(11) [5]. 人丁兴旺的机器人大家族' [J]. 网络科技时代(数字冲浪). 2002.(01)
智能机器人实验报告1 学院:化学与材料科学学院 学号: 2015100749 姓名:朱巧妤 评阅人:评阅时间:
实验1 电驱动与控制实验 (一)实验目的 熟悉和掌握机器人开发环境使用,超声传感器、碰撞传感器、温度传感器、颜色传感器等常见机器人传感器工作原理与使用方法,熟悉机器人平台使用与搭建;设计一个简单的机器人,并采用多种程序设计方法使它能动起来。 (二)仪器工具及材料 计算机、机器人实验系统、机器人软件开发平台、编程下载器等设备。 (三)内容及程序 实验内容: (1)碰撞传感器原理与应用; (2)颜色传感器原理与应用; (3)测距传感器原理与应用; (4)温度传感器原理与应用; (5)熟悉开发环境使用与操作;设计一个简单轮式移动机器人,并使用图形化编程方式实现对机器人的控制,通过该设计掌握机器人开发平台的结构设计、程序设计等基本方法。 实验步骤: 1)首先确定本次要做的机器人为货架物品颜色辨别的机器人。 2)根据模型将梁、轴、插销、螺丝等零件拼装成一个货架台 3)将货架台安装上可识别颜色的摄像头,并装在控制器上方,将两个摄像头的连接线分 别插入控制器的传感器接口,将显示器连接线插入传感器接口。 4)拼装完成后将控制器连接电脑,在电脑上运用Innobot软件对机器人进行颜色识别动 作的编程,拖动颜色传感器模块,对应选择数码管接口以及两个摄像头的接口,使机器人能将货架台上物品的颜色反应到数码管上。 5)将所编程序进行上传。测试看机器人是否能将颜色反映到显示器上完成所编动作。
(四)结果及分析 使用梁和轴以及螺钉拼装出货架台。 将拼装好的货架台装到传感器上。
FlexPendant 的操作方式 1、操作 FlexPendant 时,通常左手持设备,右手在触摸屏上操作。具体手持方法如图12所示 图12 2、手持操作器主要部件如图13所示 图 13 3、控制柜上的主要按钮和端口如图14所示 图 14 4、控制柜上钥匙开关的位置于意义如图15所示 图15 注:手动全速模式不建议使用 校准机器人零点位置的具体方法 注:需要点击操作的地方都做了浅红色标记 第一步: 选择手动操纵(参看图1,首先把钥匙开关打到手动位置) 方法: 1> 点击 ABB 2> 点击手动操纵
图 1第二步:选择动作模式(参看图2 和图3) 方法: 1> 点击动作模式 2> 点击轴1 - 3 或者轴4 - 6 3> 点击确定 第三步:选择工具坐标(参看图2 和图4) 方法: 1> 点击工具坐标 2> 点击 tGripper 3> 点击确定 图2图3第四步:选择移动速度(参看图2 和图5) 方法: 1> 点击增量 2> 点击中或者小 3> 点击确定 图 4 图 5 第五步:手动移动机器人各轴到机械零点位置(参看图2) 方法: 此时图2上操纵杆方向处显示操纵杆移动方向于轴的对应关系
注意: 如果先前选择轴1 - 3 则 1> 操纵杆上下移动为2轴动作 2> 操纵杆左右移动为1轴动作 3> 操纵杆顺/逆时针旋转为3轴动作 如果先前选择轴4 - 6 则 1> 操纵杆上下移动为5轴动作 2> 操纵杆左右移动为4轴动作 3> 操纵杆顺/逆时针旋转为6轴动作 1> 左手持示教器,四指握住示教器使能开关(在示教器下方黑色胶皮里面) 2> 右手向唯一一个方向轻轻移动操纵杆,把各轴按顺序移动到各自机械绝对零点 图 6 A(六轴机器人) 图 6B(四轴机器人) 移动顺序,依次为6轴→5轴→4轴→3轴→2轴→1轴,否则会使4,5,6轴升高以致于看不到零点位置。 机械零点位置如图6所示,当所有六个轴全部对准机械零点位置以后,机器人的姿态正如图6所示。 第六步:更新转数计数器(参看图1,此时可以示教器使能开关) 方法: 1> 点击 ABB 2> 点击校准 3> 点击 ROB_1 (参看图7)
并联机器人方案 一、并联机器人用途: 并联机器人作为一种新型的机器人形式得到了越来越多的应用,与串联机器人相比该型机器人具有结构简单、刚度大、承载能力强、误差小等特点,与串联机器人形成了良好的互补关系。可用于六自由度数控加工中心、航天器对接机构、汽车装配线、运动模拟器、岩土挖掘、光学调整、医疗机械等领域。 二、系统特点: 1、机构采用并联式结构,按工业标准要求设计,结构简单、速度快; 2、控制系统采用Windows系列操作系统,二次开发方便、快捷,适于教学实验; 3、提供教材、实验指导书等,内容涵盖机器人运动学、动力学、控制系统的设计、机器人轨迹规划等。 三、系统配置: 1、机器人本体、控制柜、电机控制卡、控制软件、理论教材及实验指导书。附属件配置有钻铣刀头、电主轴、绘图笔架、加工平台、手动夹具,另赠送一套加工所需原材料。 2、并联机器人加工装置(用电主轴本体、夹持器及钻铣刀)。 3、绘图装置(绘图笔架及绘图笔)。 4、并联机器人加工平台及工件夹持装置。 5、部分加工演示原材料(石蜡、尼龙等)。
1.并联机器人系统照片 2.并联机器人技术参数: 3.机器人型号:RBT-6T01P(全步进电机驱动) 机器人报价:175000.00元机器人型号:RBT-6S01P(全伺服电机驱动) 机器人报价:195000.00元
1.并联机器人系统照片 2.并联机器人技术参数: 3.机器人型号:RBT-6T02P(全步进电机驱动) 机器人报价:155000.00元机器人型号:RBT-6S02P(全伺服电机驱动) 机器人报价:175000.00元
六自由度桌面型并联机器人 1.并联机器人系统图片 2.并联机器人技术参数 3.机器人型号:RBT-6T03P(全步进电机驱动) 机器人报价:135000.00元机器人型号:RBT-6S03P(全伺服电机驱动) 机器人报价:155000.00元
一、机器人的定义 美国机器人协会(RIA)的定义: 机器人是一种用于移动各种材料、零件、工具或专用的装置,通过可编程序动作来执行种种任务的、并具有编程能力的多功能机械手。 日本工业机器人协会(JIRA—Japanese Industrial Robot Association):一种带有存储器件和末端执行器的通用机械,它能够通过自动化的动作替代人类劳动。(An all—purpose machine equipped with a memory device and an end—effector,and capable of rotation and of replacing human labor by automatic performance of movements.) 世界标准化组织(ISO):机器人是一种能够通过编程和自动控制来执行诸如作业或移动等任务的机器。(A robot is a machine which can be programmed to perform some tasks which involve manipulative or locomotive actions under automatic control.) 中国(原机械工业部):工业机器人是一种能自动定位控制、可重复编程、多功能多自由度的操作机,它能搬运材料、零件或夹持工具,用以完成各种作业。 二、机器人定义的本质: 首先,机器人是机器而不是人,它是人类制造的替代人类从事某种作业的工具,它能是人的某些功能的延伸。在某些方面,机器人可具有超越人类的能力,但从本质上说机器人永远不可能全面超越人类。
机器人零点标定方法 设备维修技术档案系列资料一.哪些情况需要标定零点: 零点是机器人坐标系的基准,没有零点,机器人就没有办法判断自身的位置。 机器人在如下情况下要重新标定零点: 1.进行更换电机、机械系统零部件之后。 2.超越机械极限位置,如机器人塌架。 3.与工件或环境发生碰撞。 4.没在控制器控制下,手动移动机器人关节。 5.整个硬盘系统重新安装。 6.其它可能造成零点丢失的情况。 二.零点标定: 按下面方法可以标定零点: *千分表:手工检测,输入数据的方法。 *EMT:电子仪表自动标定记录的方法。 我们这里只介绍EMT方法。 1.机器人切换到手动方式T1。 2.用左上角第一个软键切换工作方式到出现“+/-”号加手形图标为止。 3.左手扣住左侧底面使能杆,屏幕右侧将出现纵列布置的A1-A6图标。 4.按右侧对应轴的“+”或“-”软键,移动要标定的轴到零点前预停位置,使得机械臂关节两侧刻槽对准。 5.把EMT安装到对应轴指定的仪表零点触头安装底座位置。6.EMT电缆插头连接到机器人X32插口。 7.此时,如预停位置正确,则EMT右侧两个灯同时点亮。不亮时,可以用手动操作重新微调位置。 8.按软键SETUP(设定)。 9.在下级菜单中选择MASTER(管理,这里指标定零点)。10.在下级菜单中选择EMT,回车。屏幕显示出准备标定的机器人轴号:
如:Robot axis 1 Robot axis 2 Robot axis 3 Robot axis 4 Robot axis 5 Robot axis 6 11.按软键MASTER,显示信息“Start key required(需要按启动键)”。 12.扣住使能杆,按软键Program start forwards(程序正向启动,即左侧硬键盘的“+”号外套顺时针箭头)。对应轴在程序控制下移动。当EMT检测到参考点(参考刻槽),移动停止,零点位置被记录到计算机,对应轴标定显示被清除。 ***注意: 1)标定一定要从低轴号开始,否则系统将报警。 2)A1、A6轴关节的一侧刻度槽改成螺钉或突起标记,和其它轴不同,要注意。 三.反标定: 一个不可靠的零点也可以删除。步骤是: 1.按软键SETUP(设定)。 2.在下级菜单中选择MASTER(管理,这里指零点标定)。3.在下级菜单中选择EMT,回车。屏幕显示出准备删除零点的机器人轴号: 如:Robot axis 1 Robot axis 2 Robot axis 3 Robot axis 4 Robot axis 5 Robot axis 6 4.按软键UNMASTER,对应轴的零点被删除。该轴可以重新标定零点。 生产部设备工装科陈刚 2003/8/21 修改:2005/7/24
机器人机构设计中最重要的步骤之一是解决机构型综合的问题,机器人机构构型方法的研究具有十分重要的理论和实际意义,尤其是并联机器人的型综合方法一直以来都受到国内外许多研究学者的关注。在并联机器人机构的构型理论研究中,基于机构末端运动特征描述与机构需要完成的功能的简单有效的构型方法还缺乏系统的研究。 并联机器人机构构型方法研究 8 多自由度机构,其构型综合是一个非常具有挑战性的难题。目前国内外主要有 5 种并联机构的型综合研 究方法,即:基于机构的结构公式的构型方法、基于螺旋理论的综合方法、基于群论和微分几何的综合 方法、基于单开链的型综合方法以及基于集合的综合方法。 1-3-1 基于机构的结构公式的构型方法 基于机构的结构公式(即自由度计算公式)的构型方法是比较传统的一种并联机构的型综合方法。 Tsai [84] 在1999 年用基于计算自由度的Grübler-Kutzbach 公式的列举法综合了一类三自由度并联机构。 基于并联机构自由度计算的一般Grübler-Kutzbach 公式为 ( ) 1 1 = = ??+ ∑ g i i M d n g f (1.1) 式中M 为机构的自由度数; d 为机构的阶; n 为机构的杆件数(包括机架); g 为运动副数; i f 为第i 个运动副的自由度数。 当给定机构的自由度数M 后,根据(1.1)寻求机构的每个分支运动链的运动副数。并联机构属于空 间多环机构,其独立环路数l 可以由下式给出 l = g ?n +1 (1.2) 该式即为著名的欧拉环路公式。将上式带入(1.1)中,可得到 =1 ∑= + g i i
f M d l (1.3) 定义并联机构中第j 个分支总的自由度数为 j C ,则有下式成立 =1 =1 ∑=∑ mg j i j i C f (1.4) 将(1.4)代入(1.3)消去 i f 后得到 ∑= + m j j C M d l (1.5) 对于分支运动链结构相同,且分支数等于机构自由度数的对称并联机构,又有以下条件成立m = M且l = M ?1 (1.6) 把(1.6)代入(1.5)消去l 后得到 = ?+1 j d C d M (1.7) 由上式在已知d 和M 时,可以得到分支运动链的自由度数 j C ,从而给出分支运动链。例如,d =3, M =3时,由式(1.7)可得 j C =3,分支运动链可以是RRR、RPR、PRR 等。并联机器人机构构型方法研究 1 0 寻找可以生成{ } gi L 的分支运动链,此时可利用位移子群乘法运算的封闭性获得不同结构的分支。 Hervé和Angeles 等较早将李群理论引入并联机构型综合。1978 年,Hervé [113] 基于位移群的代数结 构对运动链进行了分类,证明了所有六种低副所生成的运动都是位移子群,还给出了另外六种位移子群 以及子群间交集的运算法则,奠定了位移子群以及子群间交集的运算法则和位移子群综合法的理论基
基于D-H模型的机器人运动学参数标定方法 摘要:通用机器人视觉检测站中的机器人是整个测量系统中产生误差的最主要环节,而机器人的连杆参数误差又是影响其绝对定位精度的最主要因素。借助高精度且可以实现绝对坐标测量的先进测量设备——激光跟踪仪,及其功能强大的CAM2 Measure 4.0配套软件,并利用串联六自由度机器人运动的约束条件,重新构建起D-H模型坐标系,进而对运动学参数进行修正,获得关节变量与末端法兰盘中心位置在基坐标系下的准确映射关系,以提高机器人的绝对定位精度,最后通过进一步验证,证明取得了较为理想的标定结果。 关键词:视觉检测站;工业机器人;绝对定位精度;激光跟踪仪;D-H模型; Robot kinematic parameters calibration based on D-H model Wang Yi (State key laboratory of precision measuring technology and instruments, Tianjin University, 300072,China) Abstract:Robot for universal robot visual measurement station is the most primary part causing errors in the entire system and link parameter errors of industrial robot have a great influence on accuracy. Employing laser tracker, which can offer highly accurate measurement and implement ADM (absolute distance measurement), as well as relevant software, making use of movement constrain of series-wound six-degree robot, D-H model coordinates were rebuilt. Accordingly, kinematic parameters were modified, and precise mapping from joint variables to the center of the end-effector in base coordinate was obtained and accuracy got improved. At last, result is proved acceptable by validation. Keywords: visual measurement station; industrial robot; accuracy; laser tracker; D-H model; 引言:随着立体视觉技术的不断完善与发展,利用机器人的柔性特点,发展基于立体视觉的通用测量机器人三维测试技术逐渐成为各大机器人生产厂家非常重视的市场领域。机器人的运动精度对于工业机器人在生产中的应用可靠性起着至关重要的作用。机器人各连杆的几何参数误差是造成机器人系统误差的主要环节,它主要是由于制造和安装过程中产生的连杆实际几何参数与理论参数值之间的偏差造成的。通常,机器人以示教再现的方式工作,轨迹设定好之后,只在某些固定点之间运动,这种需求使得机器人的重复性精度被设计得很高,可以达到0.1毫米以下,但是绝对定位精度很差,可以到2、3毫米,甚至更大[1]。常见的标定方法可分为三类:一、建立微分运动学模型,然后借助标定工具测量一定数目的机器人姿态,最后用反向求解的方法得到真实值与名义值之间的偏差[2]。二、使用标定工具获得一系列姿态的数据,然后对数据用线性或非线性迭代求解的方法得到机器人几何参数的修正值[3],[4]。 三、建立机器人运动学模型,用直接测量的方法修正模型参数[5],[6],[7],[8]。最近,世界著名工业机器人生厂商ABB公司运用了莱卡激光跟踪仪以保证其产品的精度。使用激光跟踪仪标定机器人不再需要其它的测量工具,从而也就省去了标定测量工具的繁琐工作;同时,这一方法是对机器人的各个运动学几何参数进行修正,结果会使机器人在整个工作空间内的位姿得到校准,而不会像用迭代求解的方法那样,只是对某些测量姿态进行优化拟合,可能会造成在非测量点处残留比较大的误差;再者,随着机器人的机械磨损,机器人的运动学参数需要重新标定,而激光跟踪仪测量系统配置起来简单,特别适合于工业现场标定。正是鉴于以
机器人技术课程实验报告 题目:机器人灭火 专业:自动化 班级: 101 姓名及学号: 2013年10 月 成都信息工程学院控制工程学院 一、设计目的: 1、通过本课程的学习和训练,了解有关机器人技术方面的基本知识,掌握机器人学所涉及的技术的基本原理和方法,得到机器人技术开发的实践技能训练。
2、巩固相关理论知识,了解机器人技术的基本概念以及有关电工电子学、单片机、传感器等技术。 3、通过使用机器人模型,编程处理机器人运动过程,分析机器人的控制原理,通过对其具体结构的了解。 4、培养自学能力和独立解决问题的能力,熟悉MT-UROBOT图形界面的编程与调试方法,熟练掌握平台的输入输出口进行控制。 二、设计任务: 使机器人能在迷宫内自主行走,能自己编写程序,让机器人完成相应的任务。 三、设计要求: 1、认真阅读教材中第1章和第2章的内容,学会工程项目的建立,应用程序的仿真与调试。 2、利用I/O口和传感器对机器人进行控制。(实验步骤和参考程序可参照使用说明中的第3章及第四章4.3节) 四、系统设计: 1、介绍所使用的硬件情况及工作原理: MT-UROBOT是一种供教学和研究的新型移动智能机器人。开关按钮控制MT-URO MT-UROBOT结构(如下:) OT 电源开关的按钮,按此按钮可以打开或关闭机器人电源。“电源”指示灯按下 MT-UROBOT 的开关后,这个灯会发绿光,这时可以与机器人进行交流了!“充电”指示灯当你给机器人充电时,“充电”指示灯发红光。“充电口”将充电器的相应端插入此口,再将另一端插到电源上即可对机器人充电。“下载口”“充电口”旁边的“下载口”用于下载程序到机器人主板上,使用时只需将串口连接线的相应端插入下载口,另一端与计算机连接好,这样机器人与计算机就连接起来了。“复位/MTOS”按钮这是个复合按钮,用于下载操作系统和复位。当串口通信线接插在下载口上时,按击此按钮,机器人系统默认为此操作为下载操作系统;如果你想使用其复位功能则需要将通信线拔下,按击此按钮,机器人系统认为此操作为系统复位。“RUN”键打开电源后,按击“RUN”键,机器人就可以运行内部已存储的程序,按照你的“指令”行动。“通信”指示灯“通信”指示灯位于机器人主板的前方,在给 MT-UROBOT 下载程序时,这个黄灯会闪烁,
校准机器人零点位置的具体方法 注:需要点击操作的地方都做了浅红色标记 第一步: 选择手动操纵(参看图1,首先把钥匙开关打到手动位置)方法: 1> 点击ABB 2> 点击手动操纵 图 1 第二步: 选择动作模式(参看图2 和图3) 方法: 1> 点击动作模式 2> 点击轴1 -3 或者轴4 -6 3> 点击确定 第三步: 选择工具坐标(参看图2 和图4) 方法: 1> 点击工具坐标 2> 点击tGripper
图 2 图 3 第四步: 选择移动速度(参看图2 和图5) 方法: 1> 点击增量 2> 点击中或者小
图 4 图 5 第五步: 手动移动机器人各轴到机械零点位置(参看图2) 方法: 此时图2上操纵杆方向处显示操纵杆移动方向于轴的对应关系注意: 如果先前选择轴1 -3 则
1> 操纵杆上下移动为2轴动作 2> 操纵杆左右移动为1轴动作 3> 操纵杆顺/逆时针旋转为3轴动作 如果先前选择轴4 -6 则 1> 操纵杆上下移动为5轴动作 2> 操纵杆左右移动为4轴动作 3> 操纵杆顺/逆时针旋转为6轴动作 1> 左手持示教器,四指握住示教器使能开关(在示教器下方黑色 胶皮里面) 2> 右手向唯一一个方向轻轻移动操纵杆,把各轴按顺序移动到各 自机械绝对零点
图 6
移动顺序,依次为6轴→5轴→4轴→3轴→2轴→1轴,否则会使4,5,6轴升高以致于看不到零点位置。 机械零点位置如图6所示,当所有六个轴全部对准机械零点位置以后,机器人的姿态正如图6所示。 第六步: 更新转数计数器(参看图1,此时可以示教器使能开关) 方法: 1> 点击ABB 2> 点击校准 3> 点击ROB_1 (参看图7) 图7 4> 点击转数计数器(参看图8) 5> 点击更新转数计数器…(会弹出一个警告界面) 6> 点击是
机电综合实验报告 两轮机器人 姓名:付文晖 班级:车辆工程二班 学号: 20110402216 同组成员:张彬 20110402203 平梦浩 20110402103 2014年12月
目录 一、实验目的.................................................. - 2 - 二、实验设备.................................................. - 2 - 三、实验内容.................................................. - 2 - 四、实验原理.................................................. - 2 - 4.1、实验平台——C51+AVR 控制板........................... - 2 - 4.2、开发平台——Keil μVision2........................... - 4 - 4.3、开发辅助工具——USBASP程序下载器软件................ - 5 - 4.4、机器人定速巡航与日字行走............................. - 6 - 4.5、机器人触须导航....................................... - 7 - 4.6、机器人红外导航....................................... - 8 - 五、实验过程及结果........................................... - 10 - 5.1、定速巡航与日字行走.................................. - 10 - 5.1.1、直线向前行走.................................. - 10 - 5.1.2、向左转1/4圈.................................. - 10 - 5.1.3、向右转1/4圈.................................. - 10 - 5.1.4、向后退........................................ - 11 - 5.1.5、日字行走...................................... - 11 - 5.2、触须导航............................................ - 12 - 5.2.1、实验准备...................................... - 12 - 5.2.2、安装胡须...................................... - 13 - 5.2.3、测试胡须...................................... - 14 - 5.2.4、触须导航程序.................................. - 14 - 5.3、红外导航............................................ - 16 - 5.3.1、搭建IR发射和探测器对......................... - 16 - 5.3.2、为何要使用三极管9013 ......................... - 17 - 5.3.3、测试红外发射探测器............................ - 17 - 5.2.4、红外导航程序.................................. - 18 - 六、实验心得................................................. - 22 -
平面2自由度并联机器人的运动学 和动力学研究 林协源1刘冠峰1 (1.广东工业大学广州) 摘要:本文面向高速高精LED电子封装设备设计了一种高速高精2自由度平面并联机构(2-PPa并联机器人)。该机构由一个动平台和两个对称分布的完全相同的支链组成,每个支链中都有一个移动副(驱动关节)和一个由平面平行四边形组成的特殊转动动副。首先推导出该机器人的运动学模型包括正反解;其次结合焊线机实际工艺要求提出多项机构性能指标对该机构的几何参数进行多目标优化;然后基于Euler-Lagrange 方程建立该机器人的动力学方程,最后通过算例分析两个移动副在动平台按照一定轨迹运动时其速度、加速度和驱动力的变化规律。这些为接下来研究该机器人的动态性能和系统解耦控制等都具有重要意义。 关键词:2自由度平面并联机器人运动学动力学 Kinematic and Dynamic Analysis of a Planar Two-degree-freedom Parallel Manipulator LIN Xieyuan1LIU Guanfeng1 (1.Guangdong University of Technology Guangzhou ) Abstract:In this paper,a type of planar 2-DOF parallel manipulator is proposed for uses in design of high- speed and high-accuracy LED packaging machines. The manipulator consists of a moving platform and two identical subchains. Each subchain is made of a prismatic joint (actuator) and a parallelogram with four passive revolute joints. We first derive the kinematic model of the manipulator. Then, we determine the optimal geometric parameters of the manipulator by solving a multi-goal optimization problem based on performance indices. We compute the dynamic equation use Euler-Lagrange formulation and use it to analyze the relationship between velocity, acceleration and driving torque of joints. This analysis is important for further study of the dynamic performance and the decoupling control methods for the manipulator. Key words:2-DOF Planar parallel manipulator Kinematics Dynamics 0 前言 在电子、包装和食品等轻工业场合中,机器人只需要3到4个自由度即可满足使用要求。串联机器人由于自身具有较大的质量和惯性,很难应用到需要高速高负载能力的场合。并联机器人很好的弥补了串联机器人这方面的不足。所以,近年来少自由度并联机器人的研究相当热门。其中3自由度并联机器人的研究已是相当深入[1-4]。在Z方向只需要较小的操作位移时,末端搭载一个1或2自由度的串联机构的2自由度并联机器人相对应3或4自由度的并联机器人会显得更加经济适用。 清华大学曽提出过两种平面2-DOF并联机器人:一种是PRRRP(P表示移动副,R 表示转动副)并联机器人,其中两移动副运动方向平行,且机器人的末端姿态是可变的[5];一种是2-PPa(Pa表示平行四边形机构)并联机器人,同样,该机器人的移动副运动方向也平行,不过其末端姿态不可变[6]。文章[6]中的并联机器人最后应用在了立式机床上。同样的2-PPa并联机器人,上海交通大学将其应用在高速高精度的场合
EPSON机械手脉冲零点校正 一、工具: 钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。 二、应用场合: 1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用, 需要重新校准机械手的位置(重新校准机械手脉冲零位)。 2.更换马达等其他问题。 三、机械手脉冲零点位置校正: 具体调节步骤如下: 1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示: .点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释 放机械手4个伺服马达刹车;具体如图: 2.点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释 放机械手4个伺服马达刹车;具体如图:
— 3.手动将机械手调整到脉冲零点位置;如下图所示: +Z方向 +X方向 +Y方向 具体细节: 1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示: 2)同理,手动移动丝杆使3、4轴如图所示:( U轴0位,丝杆端面对应外套上的指针;丝
—杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。) 3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手 伺服马达刹车;接着点击“motor off”按钮,即关闭机械手;具体如图: 4. 保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在 软件中打开命令窗口(ctrl+M)中输入: Encreset 1 按回车 Encreset 2按回车 Encreset 3按回车 Encreset 3,4按回车 如图: 5. 保持机械手目前手动零点位置不动,重启控制器,具体操作如图:
第42卷 第12期2008年12月 西 安 交 通 大 学 学 报 J OU RNAL O F XI′AN J IAO TON G U N IV ERSIT Y Vol.42 №12 Dec.2008 利用姿态约束的并联机器人运动学标定方法 任晓栋1,2,冯祖仁1,2,苏承平1,2 (1.西安交通大学系统工程研究所,710049,西安;2.西安交通大学机械制造系统工程国家重点实验室,710049,西安) 摘要:为了提高并联机器人运动精度,提出了一种利用姿态约束的运动学标定方法.借助一个双轴倾角仪,建立了机器人末端2个姿态角恒定约束,根据这种约束构造了相应的辨识模型和标定算法.标定算法得益于倾角仪重复精度和分辨率高于位置精度的特点,不受其位置精度和量程的限制,同时可避免施加机械约束给并联机器人主动关节带来特殊要求.仿真计算表明,在杆长测量精度为2μm、倾角仪重复精度为01001°的条件下,经过标定后并联机器人的位置精度可达011mm,姿态精度可达0101°. 关键词:姿态约束;运动学标定;并联机器人 中图分类号:TP24212 文献标志码:A 文章编号:02532987X(2008)1221445205 Method for Kinematic C alibration of Parallel Robots Using Orientation Constraint REN Xiaodong1,2,FEN G Zuren1,2,SU Chengping1,2 (1.Systems Engineering Institute,Xi′an Jiaotong University,Xi′an710049,China;2.State Key Laboratory of Manufacturing Systems Engineering,Xi′an Jiaotong University,Xi′an710049,China) Abstract:A new calibration met hod using orientation constraint is p resented to improve t he accu2 racy of parallel robot s.Wit h t he use of a commercial biaxial inclinometer,two attit ude angles of t he end2effecter are kept constant at different measurement configurations.The corresponding calibration algorit hm is built t hrough t he orientation constraint.Instead of positioning accuracy, repeatability and resolution of t he inclinometer are used to const ruct t he orientation const raint, and t he measurement range of t he inclinometer has no effect on t he calibration met hod.Moreo2 ver,t he act uators of t he parallel robot s do not need to operate in passive mod because t he orienta2 tion const raint is not const ructed by t he mechanical locking device.Simulation result s show t hat t he po sition accuracy and t he orientation accuracy reach0.1mm and0101°,respectively,wit h measurement p recision on leg lengt hs of2μm and repeatability on inclinometer of01001°. K eyw ords:orientation const raint;kinematic calibration;parallel robot s 精度是评价并联机器人工作性能的一项重要指标.运动学标定通过准确辨识机器人的机构参数来修正控制器中的模型参数,能够在不增加并联机器人制造成本的条件下,有效提高运动精度. 现有的并联机器人运动学标定方法可以分为外部标定法和自标定法2大类.外部标定法需要借助外部传感器直接或者间接地检测末端位姿信息全集[1]或者子集[224].这类方法原理简单,但要获取高精度的位姿信息非常困难,通常需要借助代价昂贵的检测设备.自标定方法则无需检测末端位姿信息,通常根据机器人内部冗余传感器的输出[5]或者利用由机械装置产生的运动约束来构造相应的辨识模型[627],但缺点是内部传感器的安装无法适用于已经建造的机构,而施加机械约束通常需要机器人的主 收稿日期:2008204221. 作者简介:任晓栋(1979-),男,博士生;冯祖仁(联系人),男,教授,博士生导师. 基金项目:国家重点基础研究发展规划资助项目(2007CB311006);国家高技术研究发展计划资助项目(2006AA04Z222).
爱普生机器人原点校准 方法 Coca-cola standardization office【ZZ5AB-ZZSYT-ZZ2C-ZZ682T-ZZT18】
E P S O N机械手脉冲零点校正 一、工具: 钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。 二、应用场合: 1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位)。 2.更换马达等其他问题。 三、机械手脉冲零点位置校正: 具体调节步骤如下: 1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示: .点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图: 2.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图: 3.手动将机械手调整到脉冲零点位置;如下图所示:
+Z方向 +X方向 +Y方向 具体细节: 1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示: 2)同理,手动移动丝杆使3、4轴如图所示:(U轴0位,丝杆端面对应外套上的指针;丝杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。) 3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motoroff”按钮,即关闭机械手;具体如图: 4.保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在软件中打开命令窗口(ctrl+M)中输入: Encreset1按回车 Encreset2按回车
并联机器人设计论文 摘要:并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。文中从运动副分析入手,对一种运动解耦的三自由度并联机构进行了构型研究,该机构由三个正交分布的支链组成,且机构的运动副均为转动副,构成了机构动平台x、y、z三个方向的平动解耦;在机构构型研究的基础上,对其进行了运动学分析,推导出了该并联机构的运动学正反解,分析了机构输入/输出的速度和加速度等,验证了该机构运动解耦的特性。这对该机构的动力学分析、控制策略、机构设计和轨迹规划等方面的研究,具有一定的理论意义。 关键词:三自由度并联机构;并联机器人;设计;
1.课题国外现状及研究的主要成果 少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值,更具有较好的应用前景,因此少自由度的并联机器人的设计理论的研究和应用领域的拓展成为并联机器人的研究热点之一。研究少自由度并联机构最早的学者应属澳大利亚著名机构学教授Hunt ,在1983年,他就列举了平面并联机构、空间三自由度3-rps并联机构,但对四,五自由度并联机构未作详细阐述。在Hunt之后,不断有学者提出新的少自由度并联机构机型。在少自由度并联机构机型的研究中,三维平移并联机构得到广泛的重视。clavel提出了一种可实现纯平运动三自由度Delta 并联机器人,在Delta机构的支链中采用平行四边形机构约束动平台的3个转动自由度。Tsai提出的Delta机构完全采用回转副,并通过转轴的偏移扩大了Delta机构的工作空间。在Tricept并联机床上采用的构型是由Neumann发明的一种具有3个可控位置自由度的并联机构,该机构的突出特点是带有导向装置,采用3个副驱动支链并由导向装置约束动平台。Tsai通过自由度分析提取支链的运动学特征,系统研究了并联机构的综合问题,特别研究了一类实现三自由度平动的并联机构。Rasim Alizade于2004年提出基于平台类型和联接平台的形式和类型进行分类的一种并联机构的结构综合和分类的新方法和公式,并综合出具有单平台和多平台的纯并联和串并联复联机构.我国燕山大学的黄真教授及其团队除了研制出解耦微型6维力传感器和微动机械,设计出一种新的