竞赛任务书
选手须知:
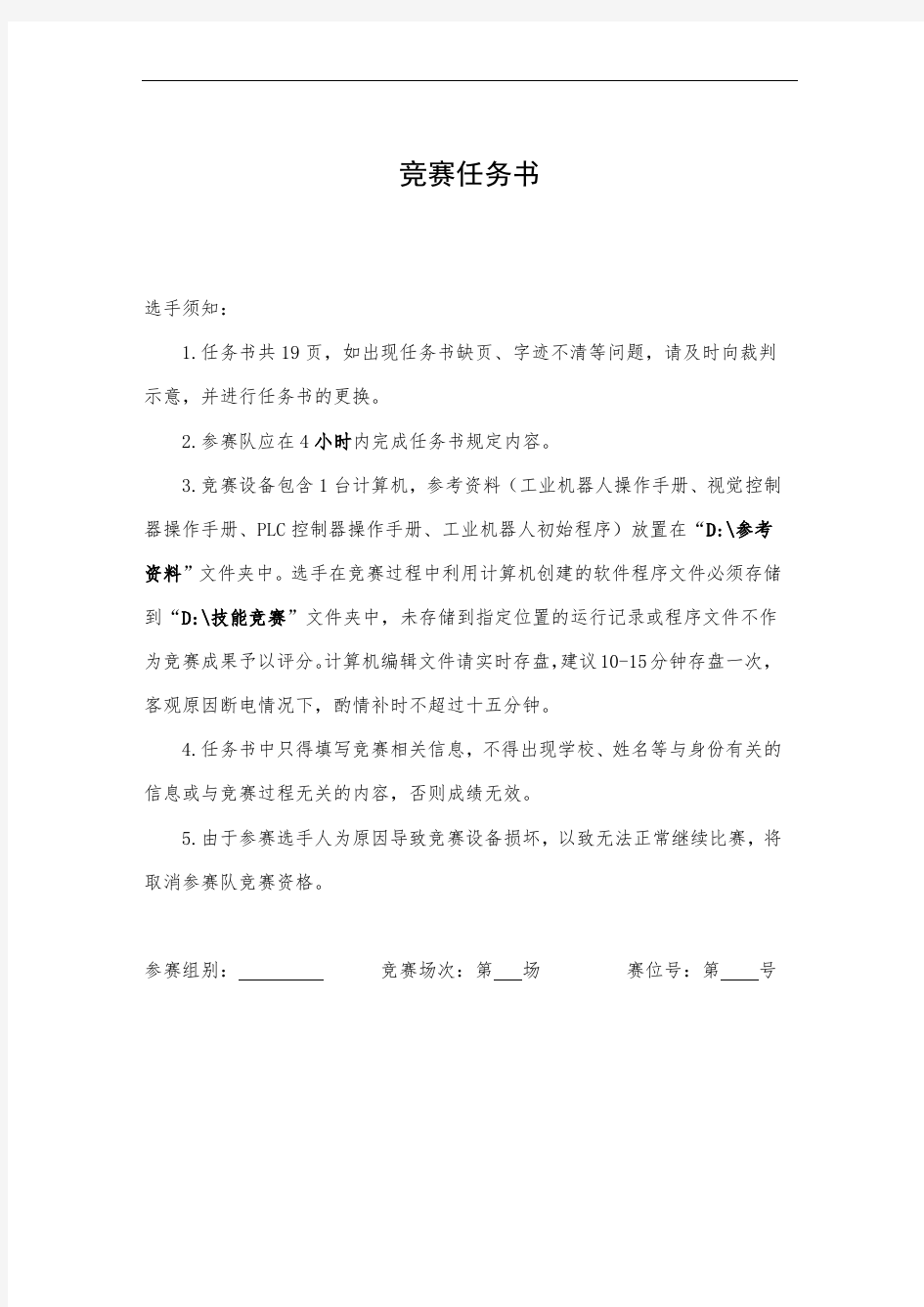
1.任务书共19页,如出现任务书缺页、字迹不清等问题,请及时向裁判示意,并进行任务书的更换。
2.参赛队应在4小时内完成任务书规定内容。
3.竞赛设备包含1台计算机,参考资料(工业机器人操作手册、视觉控制器操作手册、PLC控制器操作手册、工业机器人初始程序)放置在“D:\参考资料”文件夹中。选手在竞赛过程中利用计算机创建的软件程序文件必须存储到“D:\技能竞赛”文件夹中,未存储到指定位置的运行记录或程序文件不作为竞赛成果予以评分。计算机编辑文件请实时存盘,建议10-15分钟存盘一次,客观原因断电情况下,酌情补时不超过十五分钟。
4.任务书中只得填写竞赛相关信息,不得出现学校、姓名等与身份有关的信息或与竞赛过程无关的内容,否则成绩无效。
5.由于参赛选手人为原因导致竞赛设备损坏,以致无法正常继续比赛,将取消参赛队竞赛资格。
参赛组别:竞赛场次:第场赛位号:第号
竞赛平台简介
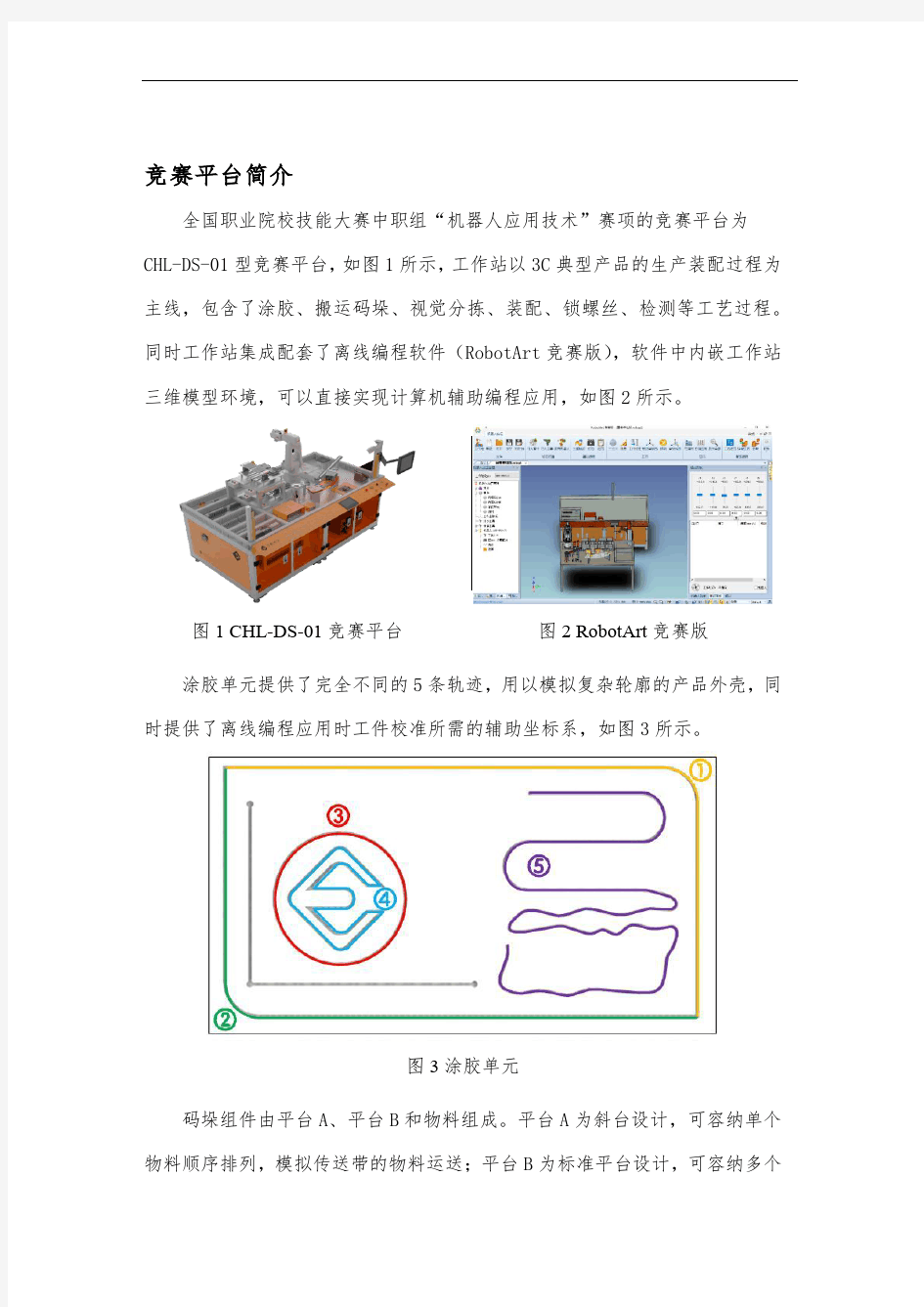
全国职业院校技能大赛中职组“机器人应用技术”赛项的竞赛平台为CHL-DS-01型竞赛平台,如图1所示,工作站以3C 典型产品的生产装配过程为主线,包含了涂胶、搬运码垛、视觉分拣、装配、锁螺丝、检测等工艺过程。同时工作站集成配套了离线编程软件(RobotArt 竞赛版),软件中内嵌工作站三维模型环境,可以直接实现计算机辅助编程应用,如图2所示。
图1 CHL-DS-01竞赛平台
图2 RobotArt 竞赛版
涂胶单元提供了完全不同的5条轨迹,用以模拟复杂轮廓的产品外壳,同时提供了离线编程应用时工件校准所需的辅助坐标系,如图3所示。
图3涂胶单元
码垛组件由平台A 、平台B 和物料组成。平台A 为斜台设计,可容纳单个物料顺序排列,模拟传送带的物料运送;平台B
为标准平台设计,可容纳多个
物料多种形态多层码放。在平台B的物料码放方式要求如图4所示。
平台B
图4 码垛组件及码垛姿态要求(四个竖着,两个横着摆放)竞赛平台提供了1个整体料架,包括芯片原料料盘、盖板原料位、产品成品位和芯片回收料盘,如图5所示,其中芯片原料料盘和芯片回收料盘对于不同类型的芯片的位置序号如图6所示。
图5 整体料架
图6芯片料盘芯片摆放位置编号
竞赛平台提供了4种模拟芯片,每种芯片分别用不同颜色(分为A类和B 类)加以区分,如图7所示。竞赛评分时,根据任务书的初始状态要求摆放,颜色排列顺序由评分裁判演示前指定。
A类:
B类:
图7芯片种类及颜色
竞赛平台提供了4种电子产品底板用以表示不同产品型号和规格,每种型号各1个,每种产品所要求的芯片种类、数量、颜色及位置均有所区别,如图8所示。每种产品都可以安装统一尺寸的盖板并利用螺丝锁紧,产品编号A03、A04、A05和A06。
图8 电子产品
竞赛平台提供了4工位的装配检测单元,如图9所示,可用于固定产品底板,在完成安装后,由PLC控制气缸和指示灯动作,实现产品的模拟检测工序。电子产品底板安装在每个工位的安装台上,由工业机器人侧向检测工位看去,底板上标识的型号文字正向为正确摆放姿态。
图9 安装检测工位
其中1号装配检测工位的装配爆炸如图10所示,所有紧固用螺丝和升降气缸的传感器并未在图中表示,1号工位与2号工位的安装方式为镜像对称,1号工位与3号工位安装方式完全相同,2号工位与4号工位安装方式完全相同。
图10装配检测工位机械装配爆炸图
竞赛平台在计算机“D:\参考资料”文件夹中提供工业机器人的初始程序,同时竞赛平台的工业机器人系统已按照初始程序完成恢复操作,内置信号如表1、表2所示。
平台在计算机“D:\参考资料”文件夹中提供了PLC的初始程序,同时竞赛平台的PLC已按照初始程序完成恢复操作,内置信号如表3、表4所示。
注意:工作站处于运行模式时,工作站正面的安全光栅启动,触发会引起报警,导致工作站运行暂停,属于危险动作。
任务一机械及电气安装调试
安装工艺要求:
1.电缆与气管分开绑扎,第一根绑扎带距离接头处60±5mm,其余两个绑扎带之间的距离不超过50±5mm,绑扎带切割不能留余太长,必须小于1mm,美观安全。气路捆扎不影响工业机器人正常动作,不会与周边设备发生刮擦勾连。
2.电缆和气管分开走线槽,气管在型材支架上可用线夹子绑扎带固定,两个线夹子之间的距离不超过 120mm。走线槽的气管长度应合适,不能折弯缠绕和绑扎变形,不允许出现漏气。
3.机械安装需选择合适工具,按提供模块零件完成单元装配,安装完毕后机械单元部分没有晃动和松动。执行元器件气缸动作平缓,无强烈碰撞。
(一)工业机器人工具快换系统的安装及接线
1.将现场实际提供的工具快换系统的法兰端快换模块安装到工业机器人
的第六轴法兰盘上,销钉孔对齐;
2.完成法兰端快换模块气路接线,包括锁定气路和工具控制气路。要求正压气路用蓝色气管,负压气路用透明气管。
3.通过工作站侧面气路调压阀,将气路压力调整到0.4-0.6MPa,并打开过滤器末端开关,测试气路连接的正确性。
(二)检测单元机械装配、传感器电路接线和气路连接
1.根据功能要求,使用手动工具完成装配检测单元的1号和2号装配检测工位;
2.根据功能要求,将1号和2号检测工位的推动气缸和升降气缸位置传感器、检测LED灯、检测指示灯的信号线全部连接到端子排上,要求连接可靠,不允许出现短路和断路问题。
3.完成1号和2号检测工位各气缸到阀岛的气路连接,阀岛部分的所有气管均要按工艺要求绑扎。设备原3号和4号检测单元的电气线路和气路不需要选手重新绑扎。
(三)PLC控制系统的IO接线
1.根据表3和表4提供的PLC控制系统IO信号表,完成控制面板上的PLC 控制线路接线,按工艺要求把线缆进行捆扎;
2.利用操作面板上的触摸屏的手动界面,对接线进行测试,确认功能正确;
(四)工业机器人的初始状态调整
通过示教器手动操纵工业机器人,使其姿态处于安全工作初始姿态,即工作原点,如错误!未找到引用源。所示,并将此点命名为Home,具体要求如下:
1.第1轴关节角度为0°;
2.第2轴关节角度为-15°;
3.第3轴关节角度为+15°;
4.第4轴关节角度为0°;
5.第5轴关节角度为+90°;
6.第6轴关节角度为0°;
根据表1、表2补齐工业机器人所缺IO信号,以满足后续任务功能要求。
(五)离线编程三维环境搭建
1.利用现场提供的测量工具,完成对工作站台面上所有设备组件的布局尺寸测量;
2.利用竞赛现场提供的电脑,打开“RobotArt竞赛版”软件,根据实际测量结果,对三维环境中的设备组件进行位置调整,满足后续离线编程应用要求;
3.工作站原型文件可通过工具栏“工作站”按钮打开使用,通过工具栏“另存为”按钮保存到“D:\技能竞赛”文件夹中,文件重命名为“三维环境”,请
勿擅自更改文件后缀。软件操作过程中注意随时保存比赛成果。
4.完成三维环境搭建并完成另存为操作后,将“三维环境”工程文件,再次通过工具栏“另存为”按钮,保存到“D:\技能竞赛”文件夹中,文件分别重命名为“涂胶编程”、“码垛编程”,请勿擅自更改文件后缀。
任务二工业机器人基础操作
(一)工具TCP标定
1.按照规范手动在工业机器人末端法兰处安装标定工具(夹爪工具);
2.依照操作规范,利用工作台上提供的标定辅助点,采用4点法完成对标定工具的TCP标定操作;创建名称为“tTCP”的工具;
3.通过工作站提供的TCP标定尖点,利用定义该工具的TCP参数,要求:(1)TCP坐标系X轴方向与工业机器人基坐标系的X轴平行,方向相反;(2)TCP坐标系Y轴方向与工业机器人基坐标系的Y轴平行,方向相同;(3)TCP坐标系Z轴方向与工业机器人基坐标系的Z轴平行,方向相反;
4.通过机器人自动测算出工具实际MASS值;
注意:比赛开始1个小时后不再接受该任务的评分申请。
5.完成标定后,手动取下夹爪工具并恢复原状,放回工作台的工具支架上。
任务三外壳涂胶及产品码垛
(一)外壳涂胶
利用竞赛现场提供的电脑,使用“RobotArt竞赛版”软件,打开任务一中保存的“涂胶编程”工程文件,完成基于工作站的外壳涂胶工艺离线编程操作。软件操作过程中注意随时通过工具栏中的“保存”按钮对工程文件进行保存。软件离线编程结果和工作站实际运行结果均作为评分要求。
涂胶工艺过程具体要求:
1.工艺过程的起始点为工作原点;
2.工业机器人自动完成涂胶工具的抓取动作;
3.要求涂胶工具的尖点依次沿涂胶单元(图3)上的编号为④、②、⑤的轨迹完成涂胶连续动作,涂胶完每条轨迹后,机器人在该轨迹结束点等待2S 再进行下一条轨迹涂胶;
4. 涂胶过程中,要求涂胶工具的尖点始终位于涂胶单元轨迹线槽的中心
线,偏离涂胶单元平面上方5mm距离;
5.完成所有涂胶轨迹后,工业机器人自动完成涂胶工具的放回动作;
6.工艺过程的结束点为工作原点;
7.涂胶过程中工具不可掉落,不得发生碰撞干涉;
8.涂胶过程中,除了工具取放和入刀退刀路径之外,其它路径运行速度设置为0.25m/s;
9.涂胶过程中,闯光栅后,机器人停止当前路径,安全返回HOME位暂停1S后,从停止点开始继续运行涂胶轨迹。
(二)产品码垛
利用竞赛现场提供的电脑,使用“RobotArt竞赛版”软件,打开任务一中保存的“码垛编程”工程文件,完成基于工作站的产品码垛工艺离线编程操作。
软件操作过程中注意随时通过工具栏中的“保存”按钮对工程文件进行保存。软件离线编程结果和工作站实际运行结果均作为评分要求。
码垛工艺过程具体要求:
1.工艺过程的起始点为工作原点;
2.工业机器人自动完成夹爪工具的抓取动作;
3.工业机器人利用夹爪工具,将所有物料从平台A依次抓取按照指定姿态摆放到平台B,在平台B的物料码放方式要求如图4所示;
4.工业机器人由平台A拾取物料时,需从底部拾取,不得从顶部拾取;
5.工业机器人在平台B码垛物料时,可自由选择摆放顺序,但最终物料摆放姿态需与要求相同;
6.工业机器人自动完成夹爪工具的放回动作;
7.工艺过程的结束点为工作原点;
8.码垛过程中工具、物料不可掉落,不得发生碰撞干涉。
9.机器人程序能对整个码垛工艺过程进行节拍测试,并将整个工艺环节的真实时间显示在机器人示教器上,维持3-5s时间;
任务四异形芯片分拣和安装
根据任务书要求,对视觉检测组件进行设置实现对异形芯片的颜色、形状等特征参数的识别和输出,对PLC和工业机器人进行编程实现电子产品装配及质量检测任务。最后系统进行联调操作,在规定时间内流畅自动完成所有工艺过程。评分时采用工作站运行模式,工业机器人可手动模式或自动模式连续运行程序完成整个过程的演示(自动模式酌情加分),仅一次机会。
分拣、装配过程中注意事项:
1.芯片原料区初始状态下未摆放任何芯片的位置,称为空位。只可使用吸盘工具对芯片空位进行探测,在探测出空位后不得再出现吸盘上无物料空吸现
象;拾取异形芯片的顺序可自行决定,在拾取和安装芯片过程中,不得掉落;吸盘工具安装芯片时,工具不能出现抖动现象;
2.异形芯片的颜色和形状检测通过视觉检测组件完成,每个芯片只允许利用视觉检测一次,芯片原料区排序后每个位置只能拾取一次,回收区芯片不得再拾取;
3. 所编写的工业机器人程序,要尽可能的满足高效率的生产要求,整个任务过程中,机器人速度和路径要设置合理,运行安全,不允许出现撞机现象;
4.完成所有工业机器人和PLC的程序编制后,将工作站切换到运行模式,完成对系统的联调;
5.锁螺丝工序中,锁紧顺序可自行决定,螺丝处于锁死状态,螺丝锁紧过程中要求螺丝不得掉落,不得出现工业机器人运行错误或力矩报警;
6.芯片料盘芯片摆放位置编号参考竞赛平台简介中图6,产品和料盘的初始状态如表6,原料区初始化芯片数目统计如表7,产品目标安装状态如表8。
工作站产品分拣、装配流程及要求如下:
1.将A03产品安装到1号检测工位,将A04产品安装到2号检测工位,将A05产品安装到3号检测工位,将A06产品安装到4号检测工位,初始状态为所有产品摆满芯片、盖板安装完毕(不锁螺丝),芯片原料区有芯片,如表6所示;
2.工业机器人工艺过程的起始点和结束点均为home点;
3.将工作站切换到运行模式,按下启动和自动启动按钮后,启动指示灯和自动启动指示灯均亮,所有工位处于初始位置;
4.第一次检测,对A03、A04、A05和A06产品同时进行检测,检测结果均为OK,绿灯亮2s后熄灭;再次对A03、A04、A05和A06产品同时进行检测,检测结果均为NG,红灯亮2s后熄灭;
5.不经视觉检测设备,使用吸盘工具,探测出芯片原料区的空位置;
6.利用当前芯片原料区的空位将原料区所有剩余的异形芯片按颜色进行分类:三极管,从14位置红色芯片与黄色芯片交替放置;电容,A类芯片从21号位置开始依次往后摆放,B类芯片从26号位置开始依次往前摆放;集成电路,A类芯片从5号位置开始依次往后摆放,B类芯片从12号位置开始依次往前摆放;
8.拆除A06产品盖板,拆除A06产品中的芯片,通过视觉检测放置到芯片回收区,CPU放置在4号位置,集成电路放置在11、12号位置,三极管放置在14号位置,电容放置在25号位置;
9.拆除A03、A04和A05产品盖板,放置于盖板原料区,利用A06产品作为过渡,利用视觉设备检测A03、A04产品中所有芯片,并比较相应位置的芯片颜色,颜色相同的芯片则放回原位,颜色不同的芯片则互换;
10.第二次检测对A03和A04产品同时进行检测,A03检测结果为NG,红灯亮,3秒后熄灭,A04检测结果为OK,绿灯亮,3秒后熄灭;
11.利用视觉设备检测A05产品中芯片,将A03、A04、A05产品中芯片与表8中颜色进行对比并调整。颜色相反的芯片放回原位,颜色相同的芯片中优先选中与表8中A06产品相应位置一致的芯片放置于A06产品中,其余放入回收区;
12.从原料区拾取与表8对应位置颜色相反的芯片补充到A03、A04和A05产品中,拾取芯片将A06产品补满,颜色与表8一致。
13.第三次检测利用吸盘工具拾取并依次安装A03、A04、A05和A06产品的盖板,依次对A06、A05、A04和A03产品进行检测(A06产品检测完成后,再检测A05产品,以此类推),A03、A04、A05和A06产品检测结果均为OK,绿灯同时亮3秒后,全部熄灭;
14.完成A03、A04、A05和A06产品的四角螺丝锁紧动作;
15.第四次检测,对A03、A04、A05和A06产品进行最后检测,A04和A06产品检测结果为OK(绿灯长亮),放置到成品区;A03和A05产品检测结果为NG(红灯长亮),放置到废品区,所有产品放置完毕后指示灯才同时熄灭。
https://www.doczj.com/doc/52436653.html,D场景组的设置,三极管的检测在2号场景组,该场景组不能有其他产品检测,设置完成后将系统设定和场景组设定文件保存在“D:\技能竞赛”中。
注意:工作站处于运行模式时,工作站正面的安全光栅启动,触发会报警。
任务五PLC编程、触摸屏编程及系统联调
根据给定PLC的I/O地址表、任务三分拣及安装动作流程、安全光栅报警
要求,编写PLC全部功能程序。PLC程序保存路径为“D:\技能竞赛”,文件名保存为PLC+场次+工位号(如第三场的04工位,文件名即为PLC304)。评分时需检验设备联机调试下的PLC程序、视觉场景设置、触摸屏以及工业机器人的功能,具体实现功能如下:
(一)PLC编程
(1)工业机器人与PLC的I/O通讯;
(2).在编程模式下,启动指示灯及自动启动指示灯熄灭;利用已给触摸屏界面的按钮,能够控制相应气缸点动运动,点亮或熄灭检测灯;该种模式下按下启动及自动启动按钮均无效。
(3).在运行模式下,按下启动按钮,启动指示灯点亮;按下自动启动按钮,自动启动指示灯点亮,所有工位处于初始位置(即推动气缸处于伸出位、升降气缸处于上升位、检测灯及检测结果灯均熄灭);按下停止按钮,所有工位处于停止状态(启动指示灯及自动启动指示灯均熄灭,各工位升降气缸处于上升位、推动气缸处于缩回位)。
(4)产品检测功能,要求检测时推动气缸缩回,推动气缸缩回后升降气缸下降,检测LED灯闪烁(周期1秒)3秒。检测结束后升降气缸升起、推动气缸伸出。检测结束后,检测结果用指示灯表示,红色指示灯亮表示产品为废品,即NG,绿色指示灯亮表示产品为成品,即OK;
(5)在编程模式下,利用已给触摸屏界面的按钮,能够控制相应气缸点动运动。确定工作站的初始化状态,即装配检测单元1-4号工位全部处于安装位置,检测器处于升起位置,检测器指示灯熄灭。
(6)工作站运行模式,工作站正面的安全光栅触发时,机器人停止,蜂鸣器报警3秒,同时八盏指示灯依次点亮(间隔0.5秒),全部点亮后八盏指示灯依次熄灭(间隔0.5秒),点亮和熄灭没有顺序要求,自行决定。
(二)视觉功能应用及系统联调
1.对欧姆龙视觉系统进行场景设置,使其可以检测并提取各类芯片的颜色、形状等信息,并将信息传输到工业机器人控制器中;
2.机器人与视觉控制系统之间通讯方式采用以太网通讯方式,如采用IO
通讯方式,将扣除相应调试分数。
(三)联调运行
2.程序编制完成后,将工作站切换到运行模式,进行系统联调。评分时工作站处于运行模式,工业机器人处于手动或自动模式,程序运行过程中不得自行停止,只有一次演示机会。
注意:工作站处于运行模式时,工作站正面的安全光栅启动,触发会报警。
任务六职业素养
在竞赛过程中,从设备操作的规范性、装配耗材使用的合理性、专用工具的操作及安全生产的认识程度等方面对参赛选手进行综合评价。
机器人大赛策划书 为了展现我校科技创新水平,提高我校学生科技创新能力,为全校同学提供一个参与科技活动、进行科技创新的平台,机器人大赛作为我部科技节特色活动正式展开。为了能够使本届机器人大赛顺利举行,能够办出自己的特色,体现自己的水平,取得预期效果,现特作本届大赛策划书如下: 第一阶段:宣传动员阶段:__月__日——__月__日为了使更多的同学了解认识机器人大会的基本情况,使更多的同学参与到本次大赛中来,我部在宣传动员方面具体做如下安排: 1、成立机器人大赛机器人研发团队,本次大赛分两组,简单组和困难组,研发团队主要负责各项技术难点进行集体攻关。 2、在例会上,将举行机器人大赛的通知和有关注意事项告知各干事,要求各干事动员班级成员,届时将派分成员到场答疑。 3、我部将于__月__日在______举行大赛动员大会,届时将邀请__ __ __作动员报告,届时将对机器人大赛参赛内容和具体流程作简单介绍。 4、科技部将以横幅、宣传板和广播稿等形式进行宣传。 5、本届机器人面向全校进行组队报名,截止时间为__月__日预期将不再接纳队伍 第二阶段:组织培训阶段:__月__——__月__
为了提高机器人大赛的技术含量,提高同学们的动手能力,我部将邀请研发团队成员和相关专业老师进行集体培训,具体时间初步安排在__ __。届时将根据实际情况进行调整。同时收齐个团队报名表,根据研发模型成本预算收缴个团队材料费用,并组织具体人员集体进料。 第三阶段:机器人调试阶段__月__日—__月__日 在____期间将安排专人为同学们调试提供调试场所和工具。我部决定将于__月__对各队机器人进行验收 第四阶段:机器人大赛:__月__日 本届机器人大赛决赛定于我部决定将于__月__月末于 ____楼举行,届时将邀请____________出席开幕式,最后根据成绩评出各组奖项。 本届机器人大赛奖项设置如下:各组将评出一等奖1名,二等奖2名,三等奖3名,优胜奖若干名,另设最佳组织奖,最佳外形奖,最佳创意奖,技术突破奖如干名,并由到场嘉宾为获奖团队进行颁奖。 机器人大赛作为我院得特色活动,对激发同学们的创新热情,提高同学们的创新意识和创新能力具有重大意义。希望同学们积极参加。在分团委各部门的密切合作下,共同办好本届机器人大赛。
2016年深圳市中小学电脑机器人活动方案 根据《广东省教育厅关于举办第十七届广东省中小学电脑制作活动的通知》(粤教信息函〔2016〕5号)精神,为进一步推进我市中小学信息技术教育,普及智能机器人教育,提高学生的信息素养和科技创新意识,制定本方案。 一、组织机构 活动由市教育局主办,成立活动组织委员会,下设活动组委会办公室,全市各中小学自愿参加活动。 (一)主办单位: 深圳市教育局。 (二)承办单位:深圳市教育信息技术中心。 (三)协办单位:深圳市育新学校。 (四)支持单位:各区教育局、各新区公共事业局,市局直属各学校。 (五)“2016年深圳市中小学电脑机器人活动”组委会组成人员: 主任:吴筠(深圳市教育局副局长) 执行主任:杨焕亮(深圳市教育信息技术中心主任) 执行副主任:殷刚(深圳市育新学校校长) 委员:黄泽武(深圳市教育信息技术中心) 汪涛(深圳市育新学校) 王奕奕(深圳市教育信息技术中心)
麦志彪(深圳中学) 各区电教站(教育信息中心)、各新区教科研中 心和市局直属学校电脑机器人活动有关负责人 二、活动目的 进一步推进我市中小学信息科技教育,为青少年提供一个机器人活动交流与学习的平台,推动机器人科学技术的普及;激发创新精神,培养实践能力,鼓励更多的青少年机器人爱好者在电子、信息、自动控制等高新科技领域进行学习、探索和实践。 三、参与对象 全日制普通高中、初中、小学在校学生。 四、比赛项目及组别 (一)实体机器人竞赛项目 1.小学组:机器人创意设计比赛、现场制作挑战赛、机器人灭火、一对一机器人足球、“撬动地球”竞赛、“九宫建设”竞赛、“资源再生”竞赛、超级轨迹赛、创意闯关竞赛、狂飙投篮赛、能源争夺战、智能垃圾分类收集机器人比赛、“校园足球”训练营测试赛。 2.初中组:机器人创意设计比赛、现场制作挑战赛、机器人灭火、二对二机器人足球、二对二机器人篮球、人型机器人全能挑战赛、“撬动地球”竞赛、“火星救援任务”竞赛、“九宫建设”竞赛、“资源再生”竞赛、超级轨迹赛、创意闯关竞赛、狂飙投篮赛、能源争夺战、智能垃圾分类收集机器人比赛、创意机器人趣味运动
北京某机器人公司创业计划书(doc 28页) 封面 Fashion creative company name
作者: 日期: 邮箱:2
北京杜克机器人有限公司Beijing Duke Robot Company 创业计划书BUSINESS PLAN 姓名:李子宁 学院:化学工程学院
专业:化学工程与工艺082班学号:080034 2010年11月
第一章总论 1.1 创业背景 1.1.1 什么是教育机器人 随着社会的发展,特别是在大力提倡素质教育的今天,如何引导学生学会观察、学会表达、学会思考、学会创新, 成为了当今教育界的重大课题。而机器人教育活动对培养学生的动手能力和创造能力等方面均有积极的作用,所以越来越多的学校将机器人教育引入了自己的课堂。 教育机器人,顾名思义,就是就是应用于教育行业的机器人。是由生产厂商专门开发的以激发学生学习兴趣、培养学生综合能力为目标的机器人成品、套装或散件。教育机器人一般具备以下几个特点: (1)符合教学使用的相关需求; (2)具有良好的性价比, 特定的教学用户群决定了其价位不能过高; (3)具开放性和可扩展性, 可以根据需要方便地增、减功能模块, 进行自主创新; (4)具有友好的人机交互界面。 1.1.2 教育机器人的作用 通过教育机器人这个平台,学生能够比较全面综合地了解现代工业设计、机械、电子、传感器、计算机软件、硬件、人机交互、人工智能等诸多领域的先进技术,并亲身接触和体验现代高新技术,在学生获得科技知识和实践能力的同时,激发了他们的创新意识和创造发明的潜能,从而加快国家培养具有创新精神和创新能力的高素质复合型人才的步伐。 1.2 公司简介 1.2.1公司名称 北京杜克机器人有限公司
机器人比赛的策划书 活动主题:利用各种材料,如油画、水彩、手绘或者废品制作模型、电脑模型、电脑制作等,设计你心中的人形机器人。(设计的机器人形式不限) 活动时间:20XX年11月初——11月中旬(具体另定) 活动地点: 11幢209 活动对象:社团全体社员及全校有兴趣的同学均可参加活动目的培养社员兴趣,加强社员之间的合作能力,锻炼动手能力,同时也将社团原有的机器人知识运用到其他领域,打破社员对机器人社团原有的枯燥感觉,重新树立一个多方面、多色彩有专业支持的社团形象。也为之后将举行的学院和学校机器人比赛做好准备,打下基础。 活动过程: 一、前期准备 1、宣传部马上制作并张贴关于此次活动简介的海报、宣传单及横幅。 2、秘书长鼓励社员和有兴趣的同学积极参加此次活动。 3、组织部部门查阅资料,与指导老师交流,准备此次活动的技术指导并熟悉整个活动的流程,负责活动地点和人员安排。 4、财务部印刷证书。 5、秘书长、宣传部做好各环节活动的总结工作。 6、社长联系评委。 7、社长、财务部规划整个活动,协调好各部门的工作。 二、具体流程
1、前期工作准备好后,组织部将印刷好的宣传单发于各个学院,每个学院10份。 2、要求参赛者设计他们自己的机器人(可以组队设计和制作)。 参赛要求: 1、要求设计人形机器人的外观(机器人的功能不用考虑) 2、要有创意,要新颖。 3、参赛者将参赛作品在11月21号晚6:30于11-209参赛。 三、活动安排 1、组织部在活动场合管理纪律 2、所有参加此次活动的社团干部提前半小时到场,熟悉活动流程。 3、所有社团干部打扫整理现场 四、后期总结 1、此次活动设立一等奖一名,二等奖两名,三等奖三名,创意奖一名,并颁发证书。 2、宣传部制作海报公布本次活动的结果 3、秘书长做一份本次活动的调研工作,评定本次活动成功与否 经费预算 海报:2元 宣传单:5元 奖品:(由赞助商提供) 横幅:50元 证书:30元 总计:87元
如对您有帮助,请购买打赏,谢谢您! 机器人大赛活动策划 一. 活动背景 随着社会的发展,机器人的发展可谓是日新月异,如今不论是在生活还是生产上,它的应用都越来越广泛。我国的机器人事业虽然起步晚,但如今也有了一定的发展,现在的大学生接过了这把火炬,就一定会让它传得更远。 我校的许多学生对机器人都有很高的热情,希望通过一定途径能有机会设计并制作机器人,并且相当一部分人都有一定的技术基础,而机器人大赛正是给他们提供了一个平台,供他们去学习、去展现。 二. 活动目的 以此来提高同学们在机械等方面的相关知识,增强同学们的动手能力,让大家在实际的设计和制作中体验实际动手操作的重要性,并以此激发同学们的创新精神,巩固并进一步加深同学们对理论知识的理解,也为我校培养机器人工业后备人才打下坚实的兴趣和知识基础。 三.活动对象全校本科生 四.活动时间*年*月 五.活动地点 六.活动内容 本次比赛分为三组,初级组、中级组(遥控组)、自动组。三组的比赛规则和难易也各不相同(具体规则见附表),参赛队可根据自身水平选择进入何组,然后在规定时间内,按照所进组的要求自行制作出相应的机器人(品种不限),最后再进行比赛。 七.活动安排 1.*年*月*号至*月*号 协会内部进行各项准备,包括海报、展板、横幅、宣传单等内容和版式的设计,宣传场地的租借,活动详细流程的规划,比赛规则以及评分标准的完善。 2.*年*月*号至*月*日 宣传 通过海报、展板、横幅、宣传单以及校广播进行宣传并在网上发布比赛规则,比赛流程,评分标准。同时开通网上电子邮件报名方式。 具体如下:1、在学校各处张贴海报,公告板、桥上、路上、宿舍楼等 为防止海报被撕,用喷雪在公告板上喷涂。 2、主要在一食堂和四食堂放大展板,并在中午和下午进行 现场报名,连续三天,并且配专人进行讲解。 3、在各个食堂门口发放传单
2009山东大学科技创新大赛获奖统计表 获奖等级项目名称 学院 团队成员资料编号 一等奖基于LED光敏特性演示系统物理徐博翔谢袆唐璇张兴成付运旭205-28 一等奖梦幻时钟摇摇棒控制刘纬纬艾顺义杨强强朱晓勇修展205-14 一等奖无子棋物理高原高众韩恩道205-07 一等奖密码防盗键盘物理宋飞滕渊徐思遥谢祎205-09 一等奖三自由度机械臂信息软件控制靳宗明李江涛蒲莲蓉卢繁205-10 一等奖无线门铃报警器信息胡斌周庆亮陈强王枭邵俊尧207-00 一等奖汽车紧急制动系统电气李阳阳苏振中李端松任玲玉207-04 一等奖新型热敏电阻特性曲线测定系统物理邹灵秀、姜浩、尤晓鹏、卢禹昆、吕晓萌207-22 一等奖基于超声波测距和3D音效定位技术的 避障导盲系统 物理卢凯唐璇沈婷婷李琳程子涵207-23 一等奖开放实验室门禁管理系统软件信息控制李绍林商振秦秀文李天平魏颖赵阳207-24 一等奖基于ARM7的智能叉车设计信息控制陶思聪武振国钟浩然李丹207-14 一等奖晴雨天自动晾衣架物理孙伟杰李少鹏郎需林208-13 一等奖智能报警系统信息章元智蒋思尧208-16 一等奖智能家居控制系统信息高群福许光于晖刘磊于姣208-19 一等奖手机来电提示物理窦伟208-23 一等奖快速多重旋转碾压金属表面超细晶结构设备材料王晓欣炊鹏飞王楠王佳308-09 一等奖多功能全自动智能晾衣架电气张新刘川高继辉陈冲冲308-05 -------------
一等奖高靶向缓释治疗膀胱癌模拟实验装置材料刘文靓张阿妮郭兴梅姚翔308-10 一等奖双足机器人转向结构信息控制张水王绵王晨司陈宋宏嘉308-14 一等奖智能跟踪助力行李架控制王风武李洪祥邵剑王兆兵308-26 二等奖智能感知机械花物理陈仲乾曹乘榕董晨胡腾205-12 二等奖简易电池内阻测试仪控制纪成丁凡利鄢镕易205-17 二等奖智能交通灯控制系统信息荆小兵奚斌党飞205-23 二等奖WALKER ROBOT智能两足机器人信息王静轩郝计军李辰陈德馨205-09 二等奖基于LED结电容特性的打地鼠游戏物理李雷李成籍晨露李洋205-22 二等奖低成本无线传感器控制张琦张辉蒋刚强鄢镕易205-15 二等奖基于凌阳61的智能小车设计信息殷超徐先栋王斐207-01 二等奖基于SPCE061A单片机的智能窗系统控制鄢镕易杨中旭207-07 二等奖激光导航机器人物理软件计算机能动赵振国巴清心葛亮孙虎范莹韩国栋207-21 二等奖基于远程遥控和语音识别的智能管家控制陈安生杜超超王培庆李宏敏巩宏丽207-15 二等奖晶体管特性图示仪的改进制作信息郝计军李大伟吕众赵海明207-27 二等奖基于射频识别的双认证门禁终端信息耿树理马高龙208-4 二等奖基于CCD的智能车控制器控制肖保臣程宇路宁208-10 二等奖基于Atmega16的温控饮水机设计电气张岩田昊208-15 二等奖向日葵式自动跟踪系统信息季靓海沈传魁208-20 二等奖SD卡读写音效俄罗斯USB键盘信息张恒田帅李忠才李德振208-28 二等奖短信远程报警系统控制于洪良李姗姗孔令帅郭云凤308-02 二等奖简易智能小车控制徐升继、刘超、李见银、齐威308-15 二等奖基于USB通信的虚拟数字示波器信息郝计军陈昊208-30 二等奖基于脑氧特性的新型疲劳报警装置机械材料软件信息周浩张家志陈海祥苏黎明308-12 三等奖基于WEB的以太网供电设备监控交换机电气信息尚健吴康宁孙东磊杨光宇205-05 三等奖成像水帘物理于新洋于安山郁万成秦暘205-19 -------------
机器人兴趣小组活动方案 一、目的:机器人兴趣小组的活动目的很明确,就是参加朝阳区的比赛。现在我们参赛的优势在于朝阳区能够参加这项比赛的学校并不多,劣势在于我们起步比较晚,其它学校都已经有了二至三年的比赛经验。另外教师的教学经验不足,也没有系统的教材。所以今后的两年可以作为我校机器人活动的起步阶段。要完成的任务有:培养学生对于机器人结构以及程序设计方面的兴趣,锻炼教师积累教学经验和比赛经验,努力形成一套适合自己的,能够培养学生动手能力和创新精神的教学内容。 二、人员:通过一学期的探索,我发现此项活动的人数不宜过多,而且受到器材、计算机和场地等的限制,以现有的环境来看14至16人最为合适。学生的年龄主要以五、六年级为主,力争今后能够形成六年级8人、五年级8人这样的人员配置。五年级以教学基础知识、培养学生兴趣为主。六年级以解决比赛中实际问题为主,培养学生创新能力。 三、时间:经过一学期的实验,我觉得机器人兴趣小组活动的时间不能够按照一般的兴趣小组时间去安排,应增加每次活动的时间。本续期后面的几次课经和吴主任的协商将活动时间改为周三下午3点至4点半,这样1个半小时的活动时间基本能够满足学生完成一个简单任务的模型搭建或编程调试的活动。经实践证明这样的安排还是取得了比较好的效果。,下学期应延续这样的时间安排。主要存在的问题是和班主任做好沟通,以保证学生正常参加活动的时间。 四、内容:机器人知识的特点决定它不适用于一般讲授的教学形式,应主要采取任务驱动的形式完成知识的教学。所以教学内容主要采用一个个和知识相关的循序渐进的小任务,在任务的设计上,五年级应注重任务和知识之间的联系,使学生通过遇到问题去学习知识。六年级应注重任务的挑战性和综合性,使学生能够应用所学知识去完成任务。 具体安排: 五年级学生主要以基本搭建技巧和导航者级别编程、发明家级别编程为主要的知识上的内容,活动中以历年比赛内容为活动范本参考乐高组建和robolab软件在工程学中的应用这本书制定出如下小的任务,如:走指定距离、穿越隧道、沿线行走、碰碰车、竞速机器人、轨迹机器人、机器人搬运工、音乐盒、步行竞赛机器人等等。这一部分的内容可以逐渐形成自己的文字材料进行积累,力争每学期能够形成几个比较成熟的任务设计。 六年级学生以乐高FLL竞赛和科协的常规赛的任务为内容开展活动进行训练。由于这两项竞赛内容每年都会有变化,所以应根据具体情况而定。主要以学生根据竞赛内容自主设计机器人、设计调试程序去完成任务为主要形式。可以让学生采用记日记的形式,将学生对任务的分析、遇到的困难、解决问题的方法,每次课完成的进度,获得的收获等等记录成一本本的技术档案。这样即培养了学生良好的科学研究的方法又为今后学习的同学留下了宝贵的经验。 五、成果:机器人教学的成果主要是通过比赛的形式进行检验,所以我们应在立足于每年朝阳区组织的机器人竞赛的基础上,尽可能多的参加一些其他的比赛,使学生在比赛中的到锻炼。另外为配合每年科技节等活动,可以安排一些小型的校内机器人竞赛。通过兴趣小组学
机器人比赛的计划方案书 活动主习题:利用各种材料,如油画、水彩、手绘或者废品制作模型、电脑模型、电脑制作等,设计你心中的人形机器人。(设计的机器人形式不限) 活动时间:20XX年11月初——11月中旬(详细另定) 活动地点: 11幢209 活动对象:社团全体社员及全校有兴趣的同学均可参加活动目的培养社员兴趣,加强社员之间的合作能力,锻炼动手能力,同时也将社团原有的机器人知识运用到其他领域,打破社员对机器人社团原有的枯燥感觉,重新树立一个多方面、多色彩有专业支持的社团形象。也为之后将举行的学院和学校机器人比赛做好准备,打下基础。 活动过程: 一、前期准备 ⑴宣传部马上制作并张贴关于此次活动简介的海报、宣传单及横幅。 ⑵秘书长鼓励社员和有兴趣的同学积极参加此次活动。 ⑶组织部部门查阅资料,与指导教师交流,准备此次活动的技术指导并熟悉整个活动的流程规范,负责活动地点和人员安排。 ⑷财务部印刷证书。 ⑸秘书长、宣传部做好各环节活动的总结归纳工作。
⑹社长联络评委。 ⑺社长、财务部规划整个活动,协调好各部门的工作。 二、详细流程规范 ⑴前期工作准备好后,组织部将印刷好的宣传单发于各个学院,每个学院10份。 ⑵要求参赛者设计他们自己的机器人(可以组队设计和制作)。 参赛要求: ⑴要求设计人形机器人的外观(机器人的功能不用考虑) ⑵要有创意,要新颖。 ⑶参赛者将参赛作品在11月21号晚6:30于11⑵09参赛。 三、活动安排 ⑴组织部在活动场合管理纪律 ⑵所有参加此次活动的社团干部提前半小时到场,熟悉活动流程规范。 ⑶所有社团干部打扫整理现场 四、后期总结归纳 ⑴此次活动设立一等奖一名,二等奖两名,三等奖三名,创意奖一名,并颁发证书。 ⑵宣传部制作海报公布本次活动的结果 ⑶秘书长做一份本次活动的调研工作,评定本次活动成功与否 经费预算 海报:2元
第十二届中国青少年机器人竞赛 机器人综合技能比赛主题与规则 1 机器人综合技能比赛简介 机器人综合技能比赛是中国青少年机器人竞赛项目之一。其活动对象为中小学生,要求参加比赛的代表队在现场自行拼装机器人、编制机器人运行程序、调试和操作机器人。参赛的机器人是程序控制的,可以在赛前公布的竞赛场地上,按照本规则进行比赛活动。 在中国青少年机器人竞赛中设置机器人综合技能比赛的目的是检验青少年对机器人技术的理解和掌握程度,激发我国青少年对机器人技术的兴趣,培养动手、动脑的能力。 2 竞赛任务 本届机器人综合技能比赛的主题为“机器人嘉年华”。 比赛中,参赛队要在三个有不同任务的场地上运行自己的机器人,机器人从待命区出发,在尽可能短的时间内展示自己的各种技能,完成那些任务,获取尽可能高的得分。 经过比赛,学生们不仅完成自己的比赛机器人,也提升了对科技和利用科技来积极影响周围世界的认识。 3 比赛场地与环境 3.1 场地 图1是比赛场地的示意图,待命区的位置只是示意。 图1 比赛场地示意图
3.2 赛场规格与要求 3.2.1 机器人比赛场地的内部尺寸为长3000mm、宽2000mm。用厚15~20mm、长500mm、宽500mm的木工板制成的拼装块拼接而成。场地四周装有白色木质围栏,栏高150mm,厚15~20mm。场地中央有放置8块可换拼装块的位置。可换拼装块的数量和具体位置在赛前公布。如果可换拼装块不足8块,由带黑色十字引导线的固定拼装块补足。第4节中所述的机器人要完成的任务一般分布在场地周围的16块带黑色十字引导线的固定拼装块中。 3.2.2 两种拼装块刷白色亚光漆,用黑 色亚光漆画出宽度为20~25mm的引 导线(或用黑色胶纸粘贴)。以下凡是 涉及黑线的尺寸,均指其中心线。固定 拼装块上的引导线是连接对边中点的 直线。可换拼装块的图形在赛前公布。 3.2.3 场上有一块长500mm、宽 500mm的锥台,是机器人的待命区, 如图2所示。机器人要从待命区启动, 完成任务后还要回到待命区。图2 锥台尺寸(mm) 3.2.4 在黑色引导线的十字或丁字交叉处,可能会出现50mm×50mm的深蓝色转弯标志。机器人在遇到转弯标志时的正确动作方式如图3所示。 图3 转弯标志及允许的出路口行驶方向 3.2.5 往届机器人竞赛中所用的部分可换拼装块的图形可能沿用,但也会有一些新的图形。有些可换拼装块上可能有6mm高的突起、坡度约12°的坡道、宽320mm高320mm的涵洞。 3.2.6 比赛场地尺寸的允许误差是±3mm,拼装块尺寸的允许误差是–2mm,对此,参赛队设计机器人时必须充分考虑。 3.2.7 拼装的场地尽可能平整,但接缝处可能有2mm的高低差和2mm的间隙。3.2.8 待命区、转弯标志的位置、非十字引导线拼装块的图形以及位置和方向,等等,在赛前准备时公布。场地一经公布,在该组别的整个比赛过程中不再变化。
附件6 IER智能挑战赛——“九宫智运”竞赛规则 一、任务简述 参赛的选手通过现场搭建、修改调试程序,在单个“九宫”场地中使用2台机器人,完成一系列模拟智能运输场景中的任务。参与竞赛的过程中,选手不仅学会机器人的搭建方法、调试过程及控制原理,同时也使机器人成为他们共同成长的伙伴。这既是本届智能挑战赛的任务,也是国际教育机器人联盟(IER)倡导的基本理念。 二、场地说明 2.1 场地规格 由9块45*45cm 的单元格拼接而成的“九宫”场地,如图2-1所示,图中不同颜色的单元格,代表不同的任务,具体任务由裁判现场公布。
2.2单元格 45*45cm单元格,内有若干个Φ5 RGB全彩灯。场地由9个单元格组成,每个单元格都有相应的任务,现场经裁判使用“九宫竞赛管理”计算机选择规定任务图拼接而成。 2.3场地编号标准 场地单元格上的箭头标识朝一个方向,以场地箭头方向开始,按从左往右,从上往下的顺序对单元格进行编号依次为1-9,如图2-2示。编号顺序和机器人完成任务的先后顺序无关。 2.4引导线 引导线所组成的图案即机器人寻迹的路线,使用Φ5 RGB全彩灯形成,采用RGB三种颜色任意组合,选手在现场根据实际情况对机器人进行调试,以完成所要求的任务。引导线两侧可能有装饰图案,但不会影响到机器人识别引导线。 2.5环境条件 比赛场地尽可能为冷光源,低照度,低磁场干扰,场地尽可能保持平整。由于单元格拼接时存在误差,可能会有一定偏差和间隙,参赛选手应考虑比赛现场存在各种实际情况的可能性,具备适应比赛现场的能力。 三、机器人与系统环境 3.1机器人尺寸与规格
机器人最大尺寸:静止状态下垂直投影不超过直径为30CM的圆(起始区)内,机器人重量(含电池)不超过1.5千克。 3.2机器人(单台)设计要求 3.2.1.限定使用1个可编程处理器,驱动电机(减速电机、舵机)不超过5个(5V电压下,转速不超过250转/分钟)。 3.2.2.机器人不限传感器个数及种类,机器人配置无线蓝牙功能,以便与九宫竞赛管理计算机进行通讯。 3.2.3.根据机器人电源连接方式不同(串联或并联),机器人使用的所有电压不得超过5V。 3.2. 4.结构:机器人必须使用塑料或航空铝材质的成型件搭建。 3.2.5. 每支参赛队可以携带2-3台机器人部件(最多不能超出3台)用于本届竞赛。在比赛时,每支参赛队可以搭建2台机器人(最多不能超出2台),两名选手各使用一台符合规则要求的机器人参赛,可相互协助。中途不能更换机器人,可允许携带部件对机器人进行现场维护。 3.2.6.在不影响正常竞赛和公平竞争的基础上,各参赛队的机器人可进行个性化装饰,以增强其表现力和辨识性。 3.3系统环境 采用《九宫竞赛管理软件V1.0》,用于竞赛的自动计时及评分。由九宫竞赛管理软件发出开始指令,自动计时,机器人结束后应发送结束指令。裁判根据选手完成任务的实际情况,在竞赛管理计算机上或纸质表格中记录选手成绩,并显示参赛队伍的最终成绩。
常见机器人竞赛简介 机器人足球: 机器人足球由于观赏性和竞技性较强,近几年在机器人比赛项目中一直受关注度较高。 将两队由规则允许的机器人球队放置于一块模拟的足球场中,双方机器人尽自己所能将球攻向对方球门。终场后进球数多的一方为胜。这便是机器人足球比赛的基本规则了。 现在机器人足球比赛已成为一种在国际上十分流行的运动,很多国家都有了自己的机器人足球比赛。在世界上比较有影响的赛事主要有两个:一个是由国际机器人足球联合会(FIRA)组织的微机器人世界杯Mirosot,另一个则是由国际人工智能协会组织的机器人世界杯RoboCup。 国际机器人足球联合会(FIRA)成立于1997年,总部设在韩国的大田,每年组织一次机器人足球世界杯,相伴而行的还要举行这一领域的学术研讨。1996年在韩国举行了首届机器人足球世界杯,来自7个国家的23支代表队参加了比赛。1997年6月来自9个国家的22支代表队参加了2个项目的角逐。第三届比赛在巴黎与第16届足球世界杯同期举行,有13个国家的39个代表队参加了4个项目决赛阶段的比赛。由于参赛队增加,1999年第四届分4个赛区进行了预选赛,角逐决赛阶段4个项目的32个名额,比赛已达到相当规模和水平。2000年第五届机器人足球世界杯在悉尼与奥运会相伴而行。FIRA比赛主要项目有超微机器人足球赛、单微机器人足球赛、微型机器人足球赛、小型机器人足球赛、自主式机器人足球赛、拟人式机器人足球赛和仿真机器人。
ROBOCUP的原意为ROBOT WORLD CUP。1997年正式成立,总部设在东京,正式注册在瑞士伯尔尼。ROBOCUP自1997年起每年举办一次机器人足球世界杯赛(The Robot World Cup)。而在1999年的世界杯赛上,SONY公司推出了四条腿的机器狗足球赛,引起了很大的轰动,从此便增加了SONY有腿机器人足球赛。第一届RoboCup机器人足球世界杯赛于1997年8月25日在日本名古屋举行。来自美、欧、日、澳的40多支球队参赛,观众达5000余人。第二届杯赛于1998年7月4日至8日在法国巴黎与第16届世界杯足球赛同时举行,参赛队上升到60多支。1999年7月28日至8月4日,第三届RoboCup世界杯赛及学术大会在瑞典斯德哥尔摩与IJCAI-99联合举行,参赛队多达90余支。2000年8月25日至9月3日,第四届杯赛及学术大学在澳大利亚墨尔本举行,正式参赛队首次突破100大关,达104支。一些著名的大学(如美国CMU和Cornell等,德国Humboldt)、国立研究院(如美国NASA)和大公司(如日本SONY)均参与了相关的活动。RoboCup的主要项目有电脑仿真比赛、小型足球机器人比赛、中型自主足球机器人比赛和SONY有腿机器人足球比赛。 当然,有的的朋友要说如此复杂的东西,根本不适合几个人搞嘛!别急,FIRA和RoboCup 都推出了自己的仿真比赛平台,你只要拥有一台电脑,懂一些编程,就完全可以参与到这项运动中来。仿真足球的最大好处就是你不必去研究图像处理或是通信方面的技术,可以完全把心思用在足球策略上来,这对那些又喜欢编程又喜欢足球的朋友来说是非常有吸引力的。FIRA和RoboCup的仿真平台均可以在它们的官方网站上免费下载。 机器人灭火:
机器人趣味竞赛活动策划方案 Planning scheme of robot fun competition 汇报人:JinTai College
机器人趣味竞赛活动策划方案 前言:公务文书是法定机关与组织在公务活动中,按照特定的体式、经过一定的处理程序形成和使用的书面材料,又称公务文件。本文档根据公文写作内容要求和特点展开说明,具有实践指导意义,便于学习和使用,本文档下载后内容可按需编辑修改及打印。 活动目的: 随着智能技术突飞猛进的发展、教育理念的不断更新,作为综合了信息技术、电子工程、机械工程、控制理论、传感技术以及人工智能等前沿科技的'机器人技术也在为教育改革贡献自己的力量。通过举办机器人比赛,可以激发同学们从事科研的兴趣,培养同学们刻苦钻研、实事求是、探索创新的精神, 活动对象: 高二全体学生(每班派三名代表参赛) 活动时间: 红五月科普艺术节5月24、25日 活动过程: (1)张贴海报;
时间:5月4日; 地点:放飞路近高二楼; 备注:当天中午12点40在8号楼104召开班长会议,通知各班开展报名及相关事宜; (2)接受报名; 自海报张贴起接受报名; 报名处为各班班长,经过各班自我筛选,班长需在5月7日前把名单(每班3人组成小队)交至本项目负责人; (3)赛前辅导; 5月10日下午第八、第九节课机器人实验室进行赛前辅导,参赛选手务必准时参加; (4)正式比赛; 24日:下午第八、第九节课在机器人实验室进行比赛拼装、测试阶段,各班在结束后将机器人留在实验室,待明天做任务; 25日:按照班级顺序依次进行比赛,由工作人员计时和打分;
(5)赛后总结,获奖同学交流比赛心得。 评比方式:设一等奖(1个),二等奖(2个),三等奖(3个), 负责人: 联络员: 比赛方式及规则: 1、机器人各项比赛,均使用乐高标准套装(即上课时使用的),各班之间不得私自将本班备件进行交换,否则视为违规,取消该项目比赛资格。 2、比赛过程中,机器人必须完成所有任务,在最短的时间内完成任务者为胜。 3、出发时,机器人的任何部分必须在起跑区域内。 4、比赛过程中,只有在机器人全部进入起跑区选手才能触碰机器人,其余情况一律不得干预机器人,如有必要,可向裁判示意干预,但要在总时间加上10秒。 5、比赛期间出现的临时问题,由裁判委员会协商处理。 -------- Designed By JinTai College ---------
城西区青少年机器人竞赛创意比赛活动方案 城西区青少年机器人竞赛创意比赛活动方案为提高我区中小学生实践能力和创新精神,由城西区教委科委科协主办的年城西区青少年机器人竞赛创意比赛活动,将于今年城西区学生科技节期间举行。 现将比赛的具体事项和竞赛规则通知如下:一主办单位城西区教育委员会城西区科协城西区科委二承办单位城西区青少年科技馆三参赛对象:城西区各中小学在校学生(含职业高中)。 四竞赛主题参考月底在天津市发布的全国青少年机器人竞赛(创意项目)信息。 五竞赛时间地点时间:年月日(周六)全天地点:待定六评奖方式及奖项设置比赛采取专家评定方式确定成绩及奖项学生奖项:根据竞赛成绩评选一等奖二等奖三等奖若干名并颁发获奖证书。 教师奖项:根据教师组织参赛和指导学生的获奖情况,评出优秀辅导教师奖若干名并颁发证书。 七报名时间地点办法由学校统一申报,不接受个人报名(详见领队会时间)。 机器人作品展示()展位:每个项目一个展位,每个展位提供一张桌子一把椅子。 桌子上标有各自的作品名称,布展时请选手确认自己的展位。 ()展板:组委会已为每个项目准备了一个展板架,要求各校制作一块(宽高)展板,放在作品后方,以供评委和观众了解作品。
布展所需的材料及电源板由各校自备。 ()布展:选手可根据项目展示的内容和形式,充分发挥想象和创意,自行设计现场动手制作项目展板。 展板上应注明学校名称作者姓名等基本情况,辅导教师姓名不得列出。 评审标准()学生动手程度:整个机器人模型及自控部分应由学生亲自设计和整体装配。 以自行设计制作的作品为佳。 ()创新性和实用性:指作品是否具有使用价值,解决方法是否可行,较以前的解决方案相比,是否具有较好地改进等。 ()学生现场表现:指学生现场操作作品演示的成功率及答辩的临场发挥水平。 展板内容和口头表达是否清晰有条理,有吸引力;学生是完全靠记忆表达还是反映出对原理的深入理解等。 ()团队合作精神:是否明确说明了每个组员在项目研究中的任务和所做出的贡献;是否每个组员都充分参与到项目的研究过程中并对项目各方面熟悉;项目的成果是否是全体成员协作共同完成。 ()作品特征:要符合机器人作品要求:传感器控制器自主动作表示。 八竞赛报名联系人:联系电话:通讯地址:城西区北街号邮编:九注意事项领队会时间:各校参赛队辅导教师在月日(周五)下午:
第十三届中国青少年机器人竞赛 机器人创意比赛主题与规则 1 关于机器人创意比赛 机器人创意比赛是基于每年一度的中国青少年机器人竞赛的主题与规则,组织在校中小学生机器人爱好者,花费6个月左右的时间,在课题导师或教练员的指导下,在学校、家庭、校外机器人工作室或科技实验室里,以个人或小组的方式,进行智能机器人的创意、设计、编程与制作,最后以具体的机器人创意作品的形式参加中国青少年机器人竞赛组委会举办的机器人创意比赛活动。 机器人创意比赛对于培养学生学习与综合运用机器人技术、电子信息技术、工程技术,激发创新思维潜能,提高综合设计和制作的能力极为有益。 2 主题——“社区志愿者” 2.1主题简介 “社区志愿者”是一个拟人化的题目。从社会的角色看,题目的主人公是志愿者;从科学的属性看,它们应该归入机器人,更具体些,归入服务机器人的范畴。追溯近代机器人的足迹,从上世纪五十年代算起,大约也有半个多世纪了。起初,机器人主要活跃在产业领域,例如人们熟知的汽车、家电、工程机械、物流、农林业、石化等,称之为产业机器人,是第一大板块。到了世纪之交,服务机器人异军突起,它们深入社会社区生活的各个方面,如清洁、清洗、保安、消防、救援、医疗、监护、康复、益智、娱乐、幼教,智能家居等等,正在为人类描绘新生活的绚丽图景,从而成为机器人产业的后起之秀,第二大板块。 服务机器人属于一种半自主或全自主作业的机器人,完成为人类群体或个体服务的诸多功能,但是一般不参与和国民经济产业部门有关的各种生产活动。在2007年第一期《科学美国人》上,比尔?盖茨发表了一篇题为“家家都有机器人”的文章。他向世界预言:机器人是继个人计算机之后的下一个热门领域。机器人即将重复个人计算机是崛起之路,成为人们
松阳县实验小学集团学校 机器人社团活动方案 一、社团名称 松阳县实验小学集团学校机器人社团 二、社团宗旨 国家未来的发展,取决于今天人才的培养。而有创新精神和实践能力的高素质人才的培养,需要教育观念、制度、模式、内容和教学方式的与时俱进。在青少年学生中开展科技活动是为了贯彻中共中央“科教兴国”战略,培养青少年学生具有科学思想、科技知识、科学工作方法,达到全面推进素质教育的目的。 机器人活动是近几年在中小学中开展的新型的活动项目。该活动以讲授、辅导、组装、编程为主,活动主要使用厂家生产的机器人活动套件。同学们将学习掌握机械、电子、结构和信息科学的相关知识。社团将以“大胆创新,挑战自我,服务未来”为宗旨,以“提高学生创新精神和实践能力,培养学生的科学思想、科技知识、科学工作方法等适应未来发展需求的基本素质”为目标,通过组织和指导学生学习机器人相关软硬件知识,了解未来机器人领域的发展趋势,倡导“科技创新,不畏艰难,勇于攀登,团结合作”的探究学习精神,努力成为未来机器人科技领域的开拓者和引领者。 三、社团活动目标 (1)知识目标: 让学生了解“机器人”零件的搭建原理,掌握基本的机械原理,学会编写程序控制传感器和马达的运转,学会基本的图纸设计方法和撰写作品设计书,了解“微程序控制器”的工作原理,了解常见传感器的工作原理。 (2)能力目标: ①让学生根据自己的“梦想”设计作品、动手搭建,锻炼学生的创造意识和动手能力。 ②学生通过学习编写程序,锻炼学生的逻辑思维和控制能力。 ③通过演示现场让学生作演讲或答辩,锻炼学生在公共场合的表现能力。 (3)情感目标:让学生体会自主学习、合作学习与探究式学习的乐趣,锻炼交往能力,形成实事求是的科学态度和精益求精的科学精神,让学生充满社会责任感,激发学生的创造能力。 四、社团活动常规设想 每学期开学之初完成新社员的招募后,每周将以年级来分组正常开展活动,按照事先的学习计划完成相关基础知识和技能的学习,然后以小组为单位分别提出自己小组的创意设计方案,通过后小组成员全力以赴的完成作品,学年结束之前通过评判小组的评判得出每个小组的最终成绩。优秀的小组成员将有机会组织代表队代表学校参加学校之外的各种比赛。 五、社员招募人数及要求 每学年开始从三至六年级招收新社员,每年招收20名左右。申请加入本社的社员,必须具备的条件:1、本校在册学生;2、自愿加入本社团;3、履行入社登记手续;4、热爱机器人科技相关专业方面的内容;5、有较强的探究学习能力,动手能力强,善于与人合作;6、学习刻苦,积极要求上进,有一定的经济基础。 六、社团活动时间和地点 活动时间:每周一至周五下午2:30—17:30(3小时);活动地点安排在学校1号机房。 七、活动内容
机器人社团活动方案 Document number:PBGCG-0857-BTDO-0089-PTT1998
松阳县实验小学集团学校 机器人社团活动方案 一、社团名称 松阳县实验小学集团学校机器人社团 二、社团宗旨 国家未来的发展,取决于今天人才的培养。而有创新精神和实践能力的高素质人才的培养,需要教育观念、制度、模式、内容和教学方式的与时俱进。在青少年学生中开展科技活动是为了贯彻中共中央“科教兴国”战略,培养青少年学生具有科学思想、科技知识、科学工作方法,达到全面推进素质教育的目的。机器人活动是近几年在中小学中开展的新型的活动项目。该活动以讲授、辅导、组装、编程为主,活动主要使用厂家生产的机器人活动套件。同学们将学习掌握机械、电子、结构和信息科学的相关知识。社团将以“大胆创新,挑战自我,服务未来”为宗旨,以“提高学生创新精神和实践能力,培养学生的科学思想、科技知识、科学工作方法等适应未来发展需求的基本素质”为目标,通过组织和指导学生学习机器人相关软硬件知识,了解未来机器人领域的发展趋势,倡导“科技创新,不畏艰难,勇于攀登,团结合作”的探究学习精神,努力成为未来机器人科技领域的开拓者和引领者。 三、社团活动目标 (1)知识目标: 让学生了解“机器人”零件的搭建原理,掌握基本的机械原理,学会编写程序控制传感器和马达的运转,学会基本的图纸设计方法和撰写作品设计书,了解“微程序控制器”的工作原理,了解常见传感器的工作原理。
(2)能力目标: ①让学生根据自己的“梦想”设计作品、动手搭建,锻炼学生的创造意识和 动手能力。②学生通过学习编写程序,锻炼学生的逻辑思维和控制能力。 ③通过演示现场让学生作演讲或答辩,锻炼学生在公共场合的表现能力。(3)情感目标:让学生体会自主学习、合作学习与探究式学习的乐趣,锻炼交往能力,形成实事求是的科学态度和精益求精的科学精神,让学生充满社会责任感,激发学生的创造能力。 四、社团活动常规设想 每学期开学之初完成新社员的招募后,每周将以年级来分组正常开展活动,按照事先的学习计划完成相关基础知识和技能的学习,然后以小组为单位分别提出自己小组的创意设计方案,通过后小组成员全力以赴的完成作品,学年结束之前通过评判小组的评判得出每个小组的最终成绩。优秀的小组成员将有机会组织代表队代表学校参加学校之外的各种比赛。 五、社员招募人数及要求 每学年开始从三至六年级招收新社员,每年招收20名左右。申请加入本社的社员,必须具备的条件:1、本校在册学生;2、自愿加入本社团;3、履行入社登记手续;4、热爱机器人科技相关专业方面的内容;5、有较强的探究学习能力,动手能力强,善于与人合作;6、学习刻苦,积极要求上进,有一定的经济基础。 六、社团活动时间和地点 活动时间:每周一至周五下午2:30—17:30(3小时);活动地点安排在学校1号机房。
近期,科学组的老师们,组织机器人校本课程和机器人兴趣班的学生,在实验室进行了八小科普展暨首届机器人竞赛,展出了同学们制作的科技作品和参加自治区青少年机器人竞赛的成果,其中包括VEX工程挑战赛和WER育机器人巡线赛,IQ机器人搭建赛。 王明老师正在给参观的同学和老师讲 解WER的竞赛规则和历年来我校取得的成 绩。我校在近几年的各类机器人比赛中取得 了优异的成绩,特别是在VEX项目和WER 项目上成绩喜人。 看这是刘俊哲同学给大家演 示的是VEX竞赛,他正在为同学们 讲解VEX机器人的操作方法,VEX 机器人是全世界一项非常广泛的 机器人赛事。其对学生各方面能 力的锻炼非常全面。也具有非常 高的观赏性,是我校传统竞赛项 目之一。
五年级学生搭建的机器 人模型,这是本次活动的 一个项目——IQ机器人 搭建赛。这是我校第一次 组织这类竞赛,目的是锻 炼学生的机械搭建能力、 绘图能力和语言表达能 力。 低年级的同学们正在研究WER机器人的竞赛场地和模型规则。
参加搭建赛的同学向低年级同学们介绍自己搭建 的机器人作品,本次参加IQ机器人搭建赛的是我校 四、五年级校本课程的同学。他们用了一周时间搭 建和创意自己的作品。有些同学还为自己的作品专 门制作了作品说明和小报,方便同学们了解自己的 作品。本次还采取了学生投票的方式进行评奖。 通过本次活动,同学们锻炼了自己的动 手操作能力,提高了学生的创新能力和制 作水平,更重要的是提高了同学们的合作 和分享的意识,让同学们能够更好的理解 机器人和人工智能技术对生活的影响。 本次活动的开展让同学们 了解了科学技术对人类产生的 巨大影响,认识到学习科学知 识的重要性,让同学们从小树 立起了学科学、爱科学的思想 意识。
第二十届中国青少年机器人竞赛 机器人综合技能比赛主题与规则 1机器人综合技能比赛简介 机器人综合技能比赛是中国青少年机器人竞赛项目之一。其活动对象为中小学生,要求参加比赛的代表队在现场自行拼装机器人、编制机器人运行程序、调试和操作机器人。参赛的机器人是程序控制的,可以在赛前公布的比赛场地上,按照本规则进行比赛活动。 在中国青少年机器人竞赛中设置机器人综合技能比赛的目的是检验青少年对机器人技术的理解和掌握程度,激发我国青少年对机器人技术的兴趣,培养动手、动脑的能力。 2比赛主题 本届机器人综合技能比赛的主题为“垃圾分类助力环保”。 实行垃圾分类,关系广大人民群众生活环境,关系节约使用资源,也是社会文明水平的一个重要体现。将生活垃圾分为四类:可回收物、有害垃圾、厨余垃圾、其他垃圾,对应的垃圾桶以蓝、红、绿、灰四种颜色表示。我们应以生活垃圾分类为载体,培养一代人良好的文明习惯、公共意识和公民意识;开展青年志愿活动,鼓励和引导青少年积极参与生活垃圾分类;动员家庭积极参与,大力传播生态文明思想和理念,引导家庭成员从自身做起,自觉成为生活垃圾分类的参与者、践行者、推动者。 本届比赛通过用机器人模拟垃圾分类,加深青少年对生活垃圾分类的了解,培养青少年的创新科技探索能力,为改善生活环境作努力,为绿色发展、可持续发展作贡献。 3比赛场地与环境 3.1场地 图1是比赛场地的示意图,待命区的位置将在赛前发的赛题中确定。 图1 比赛场地示意
3.2赛场规格与要求 3.2.1 机器人比赛场内部是拼装块拼接而成。场地四周装有白色木质围栏,栏高200mm,厚15~20mm。为提高参赛队应变能力,正式比赛的场地会有变化,场地长度为3000~6000mm,宽度2000~4000mm;基础拼装块为用厚15~20mm、长500mm、宽500mm的木工板,有可能进行100%-200%的等比例放大,场地道具尺寸不变,淡蓝色的8块拼装块可换。第4节中所述的机器人要完成的任务一般分布在场地周围的固定拼装块上。 3.2.2 两种拼装块刷白色亚光漆,用黑色亚光漆画出(或用黑色胶纸粘贴)宽度为20~25mm的引导线;以下凡是涉及黑线的尺寸,均指其中心线。固定拼装块上的引导线是连接对边中点的直线。可换拼装块的图形在赛前公布。 3.2.3 每个固定拼装块被黑色引导线分为东北、东南、西南、西北四个分区。 3.2.4 场上有一块长500mm、宽500mm刷白色亚光漆的锥台,是机器人的待命区,如图2所示。机器人要从待命区启动,完成任务后还要回到待命区。锥台上虽画有黑色引导线,但机器人可以从任何一边上下。 图2 锥台尺寸(mm) 3.2.5 在黑色引导线的十字或丁字交叉处,可能会出现50mm×50mm的深蓝色转弯标志。机器人在遇到转弯标志时的正确动作方式如图3所示。 图3 转弯标志及允许的出路口行驶方向 3.2.6 往届机器人竞赛中所用的部分可换拼装块的图形可能沿用,但也会有一些新的图形。有些可换拼装块上可能有6mm高的突起、坡度约12°的坡道、宽320mm高320mm的涵洞,也可能会出现没有引导线的空白或者有彩色图案的拼装块,等等。 3.2.7 比赛场地尺寸的允许误差是±5mm,拼装块尺寸的允许误差是–3mm,对此,参赛队设计机器人时必须充分考虑。 3.2.8 拼装的场地尽可能平整,但接缝处可能有2mm的高低差和2mm的间隙。 3.2.9 待命区、转弯标志的位置、非十字引导线拼装块的图形以及位置和方向,等等,在赛前