集成光电隔离驱动模块设计及应用
王庆义,罗 慧,刘 杰,万淑芸
(华中科技大学,湖北武汉 430074)
摘要:根据IG B T门极驱动电路的特点,分析了光电隔离驱动模块HCPL316J的工作原理和特性;给出与微处理器接口的电路和试验。结果表明,该电路灵活、可靠。
关键词:绝缘栅双极晶体管;驱动;模块/光电隔离
中图分类号:TN344 文献标识码:A 文章编号:1000-100X(2003)06-0047-03
Design and Application of an Integrated Optocouple Drive Modul
WAN G Qing2yi,L UO Hui,L IU Jie,WAN Shu2yun
(Huaz hong U niversity of Science and Technology,W uhan430074,China) Abstract:According to the characters of gate drive circuits for IG B T,the operation principle and features of the opto2 couple HCPL316J are analyzed.The interface circuits with microprocessor and experimental results are given.It is shown that the circuits are flexible and credible.
K ey w ords:IG B T;drive;modul/optocouple
1 引 言
近年来,绝缘栅双极晶体管(IG B T)因其自身的优点,已成为目前发展最迅速的新一代电力电子器件,广泛用于各种U PS电源、高性能变频器及交流调速系统中。设计IG B T的驱动电路和保护电路是应用的关键。如何保证系统稳定且可靠工作,又使系统的开发周期短,性价比高,是一个需要综合考虑的问题。目前实际产品应用中有各种典型的驱动电路,但都存在一定的不足。光电耦合器驱动模块因其体积小、结构简单、带宽高、应用方便等特点,在基于微处理器的数字控制中有很好的应用前景。
IG B T工作时对驱动电路和供电电源都有的一定要求。理想的驱动电路应满足:①较强的动态电流驱动能力;②适当的正向栅压和足够的反向栅压;
③足够的电信号隔离能力;④短路过流时能实现有效软关断;⑤有故障信号供控制电路或微处理器进行实时处理。对驱动电源也有一定要求。鉴于对电源和驱动的要求,结合实际应用选择了A GIL EN T 公司的光电耦合驱动器件HCPL316J设计电路及与控制器的接口。下面给出具体设计及其应用。
2 器件功能分析
HCPL316J是一种简单的智能型驱动器芯片。用户可根据需要灵活设置高电平输入、高电平输出和低电平输入、高电平输出的输入方式,自动复位或
定稿日期:2003-05-29
作者简介:王庆义(1974-),男,湖北武汉人,硕士研究
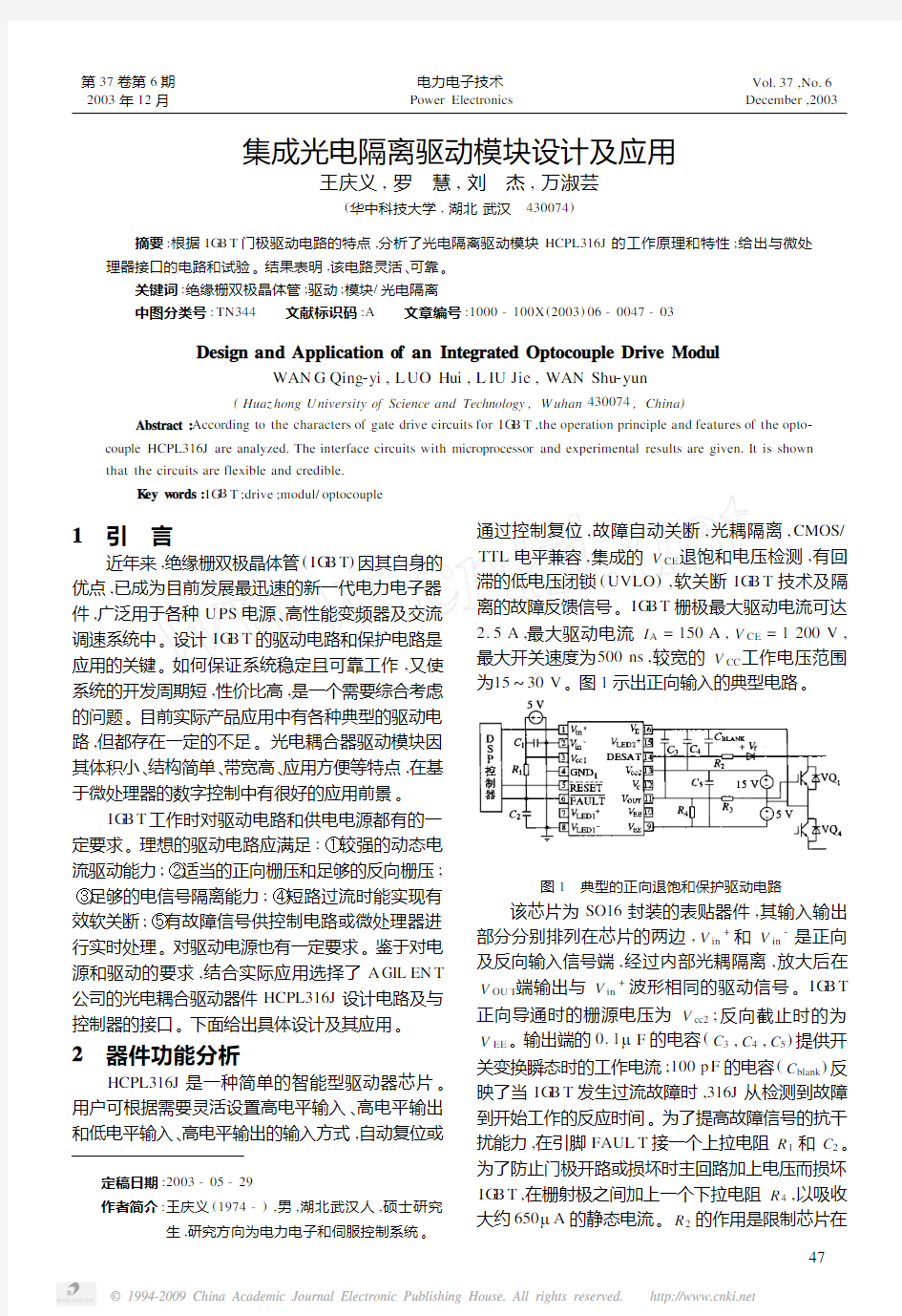
生,研究方向为电力电子和伺服控制系统。通过控制复位,故障自动关断,光耦隔离,CMOS/ TTL电平兼容,集成的V CE退饱和电压检测,有回滞的低电压闭锁UVLO),软关断IG B T技术及隔离的故障反馈信号。IG B T栅极最大驱动电流可达2.5A,最大驱动电流I A=150A,V CE=1200V,最大开关速度为500ns,较宽的V CC工作电压范围为15~30V。图1示出正向输入的典型电路
。
图1 典型的正向退饱和保护驱动电路
该芯片为SO16封装的表贴器件,其输入输出部分分别排列在芯片的两边,V in+和V in-是正向及反向输入信号端,经过内部光耦隔离,放大后在V OU T端输出与V in+波形相同的驱动信号。IG B T 正向导通时的栅源电压为V cc2;反向截止时的为V EE。输出端的0.1μF的电容(C3,C4,C5)提供开关变换瞬态时的工作电流;100p F的电容(C blank)反映了当IG B T发生过流故障时,316J从检测到故障到开始工作的反应时间。为了提高故障信号的抗干扰能力,在引脚FAUL T接一个上拉电阻R1和C2。为了防止门极开路或损坏时主回路加上电压而损坏IG B T,在栅射极之间加上一个下拉电阻R4,以吸收大约650μA的静态电流。R2的作用是限制芯片在
74
DESA T脚上的外抽电流。
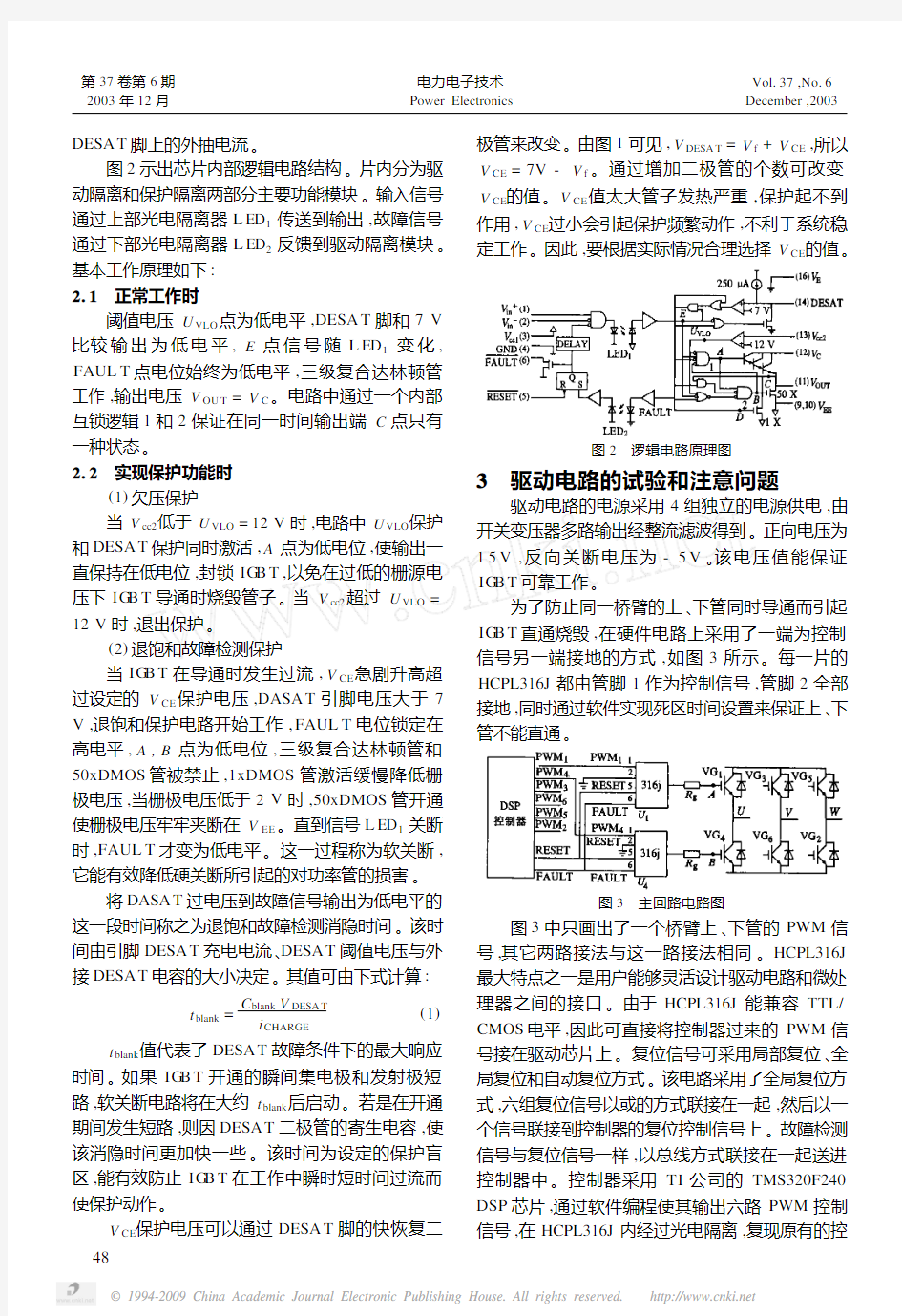
图2示出芯片内部逻辑电路结构。片内分为驱动隔离和保护隔离两部分主要功能模块。输入信号通过上部光电隔离器L ED1传送到输出,故障信号通过下部光电隔离器L ED2反馈到驱动隔离模块。基本工作原理如下:
2.1 正常工作时
阈值电压U VLO点为低电平,DESA T脚和7V 比较输出为低电平,E点信号随L ED1变化, FAUL T点电位始终为低电平,三级复合达林顿管工作,输出电压V OU T=V C。电路中通过一个内部互锁逻辑1和2保证在同一时间输出端C点只有一种状态。
2.2 实现保护功能时
(1)欠压保护
当V cc2低于U VLO=12V时,电路中U VLO保护和DESA T保护同时激活,A点为低电位,使输出一直保持在低电位,封锁IG B T,以免在过低的栅源电压下IG B T导通时烧毁管子。当V cc2超过U VLO= 12V时,退出保护。
(2)退饱和故障检测保护
当IG B T在导通时发生过流,V CE急剧升高超过设定的V CE保护电压,DASA T引脚电压大于7 V,退饱和保护电路开始工作,FAUL T电位锁定在高电平,A,B点为低电位,三级复合达林顿管和50xDMOS管被禁止,1xDMOS管激活缓慢降低栅极电压,当栅极电压低于2V时,50xDMOS管开通使栅极电压牢牢夹断在V EE。直到信号L ED1关断时,FAUL T才变为低电平。这一过程称为软关断,它能有效降低硬关断所引起的对功率管的损害。
将DASA T过电压到故障信号输出为低电平的这一段时间称之为退饱和故障检测消隐时间。该时间由引脚DESA T充电电流、DESA T阈值电压与外接DESA T电容的大小决定。其值可由下式计算:
t blank=C blank V DESA T
i CHARGE
(1)
t blank值代表了DESA T故障条件下的最大响应时间。如果IG B T开通的瞬间集电极和发射极短路,软关断电路将在大约t blank后启动。若是在开通期间发生短路,则因DESA T二极管的寄生电容,使该消隐时间更加快一些。该时间为设定的保护盲区,能有效防止IG B T在工作中瞬时短时间过流而使保护动作。
V CE保护电压可以通过DESA T脚的快恢复二极管来改变。由图1可见,V DESA T=V f+V CE,所以V CE=7V-V f。通过增加二极管的个数可改变V CE的值。V CE值太大管子发热严重,保护起不到作用,V CE过小会引起保护频繁动作,不利于系统稳定工作。因此,要根据实际情况合理选择V CE的值
。
图2 逻辑电路原理图
3 驱动电路的试验和注意问题
驱动电路的电源采用4组独立的电源供电,由开关变压器多路输出经整流滤波得到。正向电压为15V,反向关断电压为-5V。该电压值能保证IG B T可靠工作。
为了防止同一桥臂的上、下管同时导通而引起IG B T直通烧毁,在硬件电路上采用了一端为控制信号另一端接地的方式,如图3所示。每一片的HCPL316J都由管脚1作为控制信号,管脚2全部接地,同时通过软件实现死区时间设置来保证上、下管不能直通
。
图3 主回路电路图
图3中只画出了一个桥臂上、下管的PWM信号,其它两路接法与这一路接法相同。HCPL316J 最大特点之一是用户能够灵活设计驱动电路和微处理器之间的接口。由于HCPL316J能兼容TTL/ CMOS电平,因此可直接将控制器过来的PWM信号接在驱动芯片上。复位信号可采用局部复位、全局复位和自动复位方式。该电路采用了全局复位方式,六组复位信号以或的方式联接在一起,然后以一个信号联接到控制器的复位控制信号上。故障检测信号与复位信号一样,以总线方式联接在一起送进控制器中。控制器采用TI公司的TMS320F240 DSP芯片,通过软件编程使其输出六路PWM控制信号,在HCPL316J内经过光电隔离,复现原有的控
84
制信号去控制IG B T 。DSP 检测FAUL T 信号,如果有故障,则封锁PWM 输出。要使系统重新工作必须先发出一个RESET 信号,然后送出PWM 信号才能正常运行。图4示出与PWM 1,PWM 4和U 1,U 2驱动芯片输出点A ,B 相应的PWM 的波形
。图4 相应PWM 波形图
图中 T ———PWM 周期
T d ———设定的死区时间,可由软件实现
由图4可见,A 点波形完整地复现了PWM 1的
信号;B 点波形完整地复现了PWM 4的信号,有效地实现了输入到输出的电气隔离和放大,以及重现
的脉冲信号。
在接口电路设计中应注意:①要求驱动芯片的供电电压比较稳定,最大值不能超过5.5V ,否则会损坏芯片;②该芯片的控制功率电源较多,而且还有部分高压信号与其相连,因此在布线制板时一定要考虑电源之间的间距和芯片输出到IG B T 之间的距离;③为了提高系统的抗共模干扰能力,可以在控制器和驱动电路之间加光耦。
4 结 论
集成光电隔离驱动模块HCPL316J 体积小,使用简单,设计灵活,保护功能完善,在基于DSP 的PWM 控制器接口电路设计中有独特的优点,某些功能如软关断可灵活设计优于EX840。该电路已在某公司高性能变频器样机中使用,运行结果良好。参考文献:
[1]华 伟.IG B T 驱动及短路保护电路MS7959L 研究
[J ].电力电子技术,1998,32(1):88~90.
[2]
赵 莉.IG B T 模块驱动电路的分析和设计[J ].华东交通大学学报,1999,16(3):39~46.
(上接第46页)
方式2,即VQ 13,VQ 15均关断,VQ 14开通;转速达到300r/min 左右时,反电势较大,阻碍电枢电流维持
在较大起动转矩所需的值。为保证能产生足够的输出转矩,可将电机绕组切换至并联状态运行,即VQ 13,VQ 15开通,VQ 14关断。在整个起动过程中,为产生尽可能大的输出转矩,充分利用功率开关的能力,采用限流控制策略,电流大于设定的上限值,则关断功率器件,小于设定的下限值,则开通相应位置的功率器件,使绕组电流维持在一定范围内,从而保证足够的起动转矩输出。3.2 发电控制
电机发电转速范围宽,为1000~2500r/min ,电机绕组各支路的发电电势也将按相应比例变化。在低速时,绕组串联工作发电电势仍然小于42V ,利用电机绕组电感,使电路工作于Boost 升压方式,控制PWM 斩波占空比可满足发电要求(VQ 13~VQ 15均关断,VQ 4~VQ 6关断,通过VQ 1~VQ 3同时开通产生涡流、关断时续流发电,或反之。VQ 7~VQ 12的工作过程与之相同)。在中速时,绕组串联工作发电电势大于42V ,并联时则小于42V ,除VQ 14斩波外,其余均关断。开通时为串联工作,关断时为并联工作,绕组在串联时向电容充电,控制VQ 14的PWM 斩波占空比可满足发电要求;在高速
时,绕组并联工作的发电电势接近42V ,VQ 13,VQ 15
关断,VQ 14保持常通,处于并联工作,采用低速发电的Boost 升压方式发电。
4 结 论
针对770N ?m 较大起动转矩的ISG ,配合专用的稀土永磁电机和相应的基于DSP +CPLD 的数字控制器,设计了两套独立的三相功率变换器并通过另外的功率器件实现了可变结构的ISG 功率拓扑。通过控制器的状态控制,该功率变换器可将稀土永磁电机的两套绕组进行串联和并联运行,从而实现ISG 的电机起动、发电、助力、再生制动等功能。参考文献:
[1]
Rehman H ,Xu X ,Liu N ,et al .Induction Motor Drive System for the Visteon Integrated Starter 2alternator[A ].25th Industrial Electronics and Control Conference [C ].San Jose California ,1999:636~641.[2]
Miller J M ,G ale A R ,P McCleer J ,et al .Starter 2alterna 2tor for Hybrid Electric Vehicle :Comparison of Induction and Variable Reluctance Machines and Drives[A ].IEEE Industry Application S ociety Annual Meeting[C ].1998:513~523.[3]
李声晋,卢 刚,马瑞卿,等.开关磁阻组合起动机/发电机设计及试验[J ].中国电机工程学报,2000,20(2):
10~14.
9
4集成光电隔离驱动模块设计及应用
MOS管驱动变压器隔离电路分析和应用 今天在研究全桥电路,资料和书上谈到的,大多数基于理想的驱动器(立即充电完成)。这里 一篇幅把MOS管驱动的来龙去脉搞搞清楚。 预计要分几个篇幅: 1.MOS管驱动基础和时间功耗计算 2.MOS管驱动直连驱动电路分析和应用 3.MOS管驱动变压器隔离电路分析和应用 4.MOS管网上搜集到的电路学习和分析 今天主要分析MOS管驱动变压器隔离电路分析和应用和MOS管驱动基础和时间功耗计算。 参考材料: 《Design And Application Guide For High Speed MOSFET Gate Drive Circuits》是一份很好的材料《MOSFET 驱动器与MOSFET 的匹配设计》也可以借鉴。 首先谈一下变压器隔离的MOS管驱动器: 如果驱动高压MOS管,我们需要采用变压器驱动的方式和集成的高边开关。 这两个解决方案都有自己的优点和缺点,适合不同的应用。 集成高边驱动器方案很方便,优点是电路板面积较小,缺点是有很大的导通和关断延迟。 变压器耦合解决方案的优点是延迟非常低,可以在很高的压差下工作。常它需要更多,缺点是需要很多的元件并且对变压器的运行有比较深入的认识。 变压器常见问题和与MOS管驱动相关的问题: 变压器有两个绕组,初级绕组和次级绕组实现了隔离,初级和次级的匝数比变化实现了电压缩放,对于我们的设计一般不太需要调整电压,隔离却是我们最注重的。 理想情况下,变压器是不储存能量的(反激“变压器”其实是耦合电感)。不过实际上变压器还是储存了少量能量在线圈和磁芯的气隙形成的磁场区域,这种能量表现为漏感和磁化电感。对于功率变压器来说,减少漏感可以减少能量损耗,以提高效率。MOS管驱动器变压器的平均功率很小,但是在开通和关闭的时候传递了很高的电流,为了减少延迟保持漏感较低仍然是必须的。 法拉第定律规定,变压器绕组的平均功率必须为零。即使是很小的直流分量可能会剩磁,最终导致磁芯饱和。这条规则对于单端信号控制的变压器耦合电路的设计有着重大影响。 磁芯饱和限制了我们绕组的伏秒数。我们设计变压器必须考虑最坏情况和瞬时的最大的伏秒数。(在运行状态下,最坏情况和瞬时的,最大占空比和最大电压输入同时发生的情况),唯一我们确定的是变压器有一个稳定的电源电压。 对于单端应用的功率变压器来说,很大一部分开关周期需要保留来保证磁芯的正确复位(正激变换器)。复位时间大小限制电路运行的占空比。不过由于采用交流耦合实现了双向磁化,即使对于单端
1.产品说明产品说明:: 本L298N 驱动模块,采用ST 公司原装全新的L298N 芯片,采用SMT 工艺稳定性高,采用高质量铝电解电容,使电路稳定工作。可以直接驱动两路3-16V 直流电机,并提供了5V 输出接口(输入最低只要6V),可以给5V 单片机电路系统供电(低纹波系数),支持3.3V MCU ARM 控制,可以方便的控制直流电机速度和方向,也可以控制2相步进电机,5线4相步进电机。是智能小车必备利器。
: 产品参数: .产品参数 1.驱动芯片:L298N双H桥直流电机驱动芯片 2.驱动部分端子供电范围Vs:+5V~+16V ; 如需要板内取电,则供电范围Vs:+6V~+16V 3.驱动部分峰值电流Io:2A 4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V) 5.逻辑部分工作电流范围:0~36mA 6.控制信号输入电压范围(IN1 IN2 IN3 IN4): 低电平:-0.3V≤Vin≤1.5V 高电平:2.3V≤Vin≤Vss 7.使能信号输入电压范围(ENA ENB): 低电平:-0.3≤Vin≤1.5V(控制信号无效) 高电平:2.3V≤Vin≤Vss(控制信号有效) 8.最大功耗:20W(温度T=75℃时) 9.存储温度:-25℃~+130℃ 10.驱动板尺寸:55mm*45mm*33mm(带固定铜柱和散热片高度) 12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
3.接口说明接口说明:: 图中蓝色端子为电机驱动输出端与驱动电源输入端,排针处为电机控制 逻辑输入端与5V 电源输出端 OUT4 OUT3 OUT2 OUT1 控制电机输出端 VDD GND 为驱动电源输入端输入电压+6-16V
(1)、驱动变压器的原边感量应该取大些,但是不能过大,过大会的导致Q值过高,从而在动态的时候会有问题。当电感量加大的时候,驱动波形中开起和关断的时候,震荡慢慢减小,最后消失 (2)、可能,高磁导率的磁芯绕制的变压器,可以获得更高的原边电感,减小激磁电流,因此可以减小所需的驱动电流。 用高磁导率的磁芯,匝比不变,电感一定,圈数可以少一点,寄生参数影响小,波形失真小 (3)、电感量越大阻抗越大,则耦合次级的波形越正常: (4)、问:电感量越高越好吗?? 答:也不是肯定有个极限 一般来说前面有个隔直电容,那么就形成一个串联谐振电路,对于这个谐振电路1)如果L取得太大,就会造成谐振周期很大,可能起机稳定之前震荡中直流偏置复位不及时磁芯饱和,所以一般应该保持在10mH以下 2)另外与开关频率有关,一定要保证LC的谐振频率离驱动频率越远越好,否则在会造成电感上的电压=Q*Vdriver,驱动电压可能会飙升到几十伏去,而电感量越大其谐振频率越小越不容易进入开关频率周围,另外L越大Q越大其选频性能越好越不容易受到影响。 所以一般来说对于一个驱动电路基本上参数都是确定的,没有什么好改变的,隔直电容100nF左右,电感量1-10mH左右,磁芯大小只跟开关频率有关,频率大些就能选小点的磁芯 (5)、那么这里面有几个参数:Tr 上升时间,时间越短,也就是我们平常说的越陡,怎么才能做到这点,方波是由正弦波叠加二成,越到脉冲的边沿频率越高,而我们的变压器的分布电容和漏感组成低通滤波器,如国变压器绕制工艺不好,分布参数大,那么更多高频成分被滤除掉,那么就出现“丢波”那么上升沿就是斜线二不是直线了! (6)、那么怎么改变分布参数呢?首先我们知道绕组越接近磁心表面漏感越小,绕组匝数越少,越容易作到这点;另外磁心的电感系数越高、磁导率越高,导磁能力越好,漏感越小。那么达到要求的电感量或者是初级阻抗的匝数越少。所以我们大多驱动变压器、网络变压器都用高导材料来做。另外在一个变压器中分布电容和漏感是两个矛盾的参数,但是通过绕制方法可以折中处理。 (7)、
驱动电路设计 在单片机采集完工件的温度信号后,通过算法计算出下一个工件的节拍,确定下一个工件的推出时间后,就要发出驱动信号,通过驱动电路驱动气缸。 本部分的设计思路是:单片机发出控制信号后,通过三极管驱动继电器,通过继电器的二次触点与气缸相连,驱动气缸。 3.3.1继电器的选择 气缸的额定电压220V,额定电流3A,根据气缸的电气参数,我们继电器选择汇科公司的HK4100F-DC5V-SH型号的继电器。 HK4100F-DC5V-SH的主要技术参数: 1.触点参数 触点形式:1C(SPDT)一组转换触点; 触点负载:3A 220V AC/30V DC; 阻抗:≤100mΩ; 额定电流:3A; 电气寿命:≥10万次; 机械寿命:≥1000万次; 2.线圈参数 阻值(±10%):120Ω; 线圈功耗:0.2W; 额定电压:DC 5V; 吸合电压:DC 3.75V; 释放电压:DC 0.5V; 工作温度:-25℃~+75℃; 绝缘电阻:≥100MΩ; 线圈与触点间耐压:4000V AC/1分钟; 触点与触点间耐压:750 V AC/1分钟; 转换型(Z型)这是触点组型。这种触点组共有三个触点,即中间是动触点,上下各一个静触点。线圈不通电时,动触点和其中一个静触点断开和另一个闭合,线圈通电后,动触点就移动,使原来断开的成闭合,原来闭合的成断开状态,达到转换的目的。这样的触点组称为转换触点。用“转”字的拼音字头“z”表示。 3.3.2 三极管的选择 因为AT89C52单片机的I/O口输出电流很小,极限值为15mA。所以要用三极管放大来驱动继电器。 1.功率PCM:大于5V×继电器电流(5×40mA=0.2W)的两倍;
DCDC驱动电路设计规范 2002年05月30日发布2002年05月30日实施艾默生网络能源有限公司
前言 本规范于2002.05.30首次发布。 本规范起草单位:研发业务管理部、一次电源开发部 本规范执笔人:茹永刚 本规范主要起草人:茹永刚、方旺林、吴建华、周代文、张华健、张强本规范标准化审查人:林攀 本规范批准人:方强 本规范修改记录:
更改信息登记表
目录 摘要 (5) 缩写词/关键词/解释 (5) 1.来源 (5) 2.适用范围 (5) 3.规范满足的技术指标(特征指标) (5) 4.详细电路图................... (5) 5.工作原理简介 (6) 6.设计、调试要点 (6) 7.局部PCB版图(可选项)................. .. (7) 8.元器件明细表(详见附录)................................. . (7) 9.设计实例 (7) 10.附录 (9) 附录1.元器件明细表 (9) 附录2.应用反例(可选项) (9)
摘要 本规范介绍了一种常用的MOSFET驱动线路,该电路适用于全桥、半桥等互补对称驱动电路(双正激线路同名端需更改),可以有效的消除由于MOSFET米勒效应引起的误导通。线路简单成本较低。 关键词 米勒效应、导通时间、关断时间 缩略词解释 一来源 本规范中的电路来源于H5415Z模块的实际应用,已经通过大批量运行得到验证, 二适用范围 该单元电路可用于一般的有双管驱动需求的整流模块中,如一次电源新50A整流模块、新25A整流模块、100A整流模块等等。 三规范满足的技术指标(特征指标) 驱动在新50A中的使用指标为: ——工作频率:80K ——驱动电压:12.5V ——驱动功率:1.23W(DC/DC管子采用IRFP460A) 四详细的电路图
MOSFET驱动变压器设计详解 今天在研究全桥电路,资料和书上谈到的,大多数基于理想的驱动器(立即充电完成)。这里 一篇幅把MOS管驱动的来龙去脉搞搞清楚。 预计要分几个篇幅: 1.MOS管驱动基础和时间功耗计算 2.MOS管驱动直连驱动电路分析和应用 3.MOS管驱动变压器隔离电路分析和应用 4.MOS管网上搜集到的电路学习和分析 今天主要分析MOS管驱动变压器隔离电路分析和应用和MOS管驱动基础和时间功耗计算。 参考材料: 《Design And Application Guide For High Speed MOSFET Gate Drive Circuits》是一份很好的材料《MOSFET 驱动器与MOSFET 的匹配设计》也可以借鉴。 首先谈一下变压器隔离的MOS管驱动器: 如果驱动高压MOS管,我们需要采用变压器驱动的方式和集成的高边开关。 这两个解决方案都有自己的优点和缺点,适合不同的应用。 集成高边驱动器方案很方便,优点是电路板面积较小,缺点是有很大的导通和关断延迟。 变压器耦合解决方案的优点是延迟非常低,可以在很高的压差下工作。常它需要更多,缺点是需要很多的元件并且对变压器的运行有比较深入的认识。 变压器常见问题和与MOS管驱动相关的问题: 变压器有两个绕组,初级绕组和次级绕组实现了隔离,初级和次级的匝数比变化实现了电压缩放,对于我们的设计一般不太需要调整电压,隔离却是我们最注重的。 理想情况下,变压器是不储存能量的(反激“变压器”其实是耦合电感)。不过实际上变压器还是储存了少量能量在线圈和磁芯的气隙形成的磁场区域,这种能量表现为漏感和磁化电感。对于功率变压器来说,减少漏感可以减少能量损耗,以提高效率。MOS管驱动器变压器的平均功率很小,但是在开通和关闭的时候传递了很高的电流,为了减少延迟保持漏感较低仍然是必须的。 法拉第定律规定,变压器绕组的平均功率必须为零。即使是很小的直流分量可能会剩磁,最终导致磁芯饱和。这条规则对于单端信号控制的变压器耦合电路的设计有着重大影响。 磁芯饱和限制了我们绕组的伏秒数。我们设计变压器必须考虑最坏情况和瞬时的最大的伏秒数。(在运行状态下,最坏情况和瞬时的,最大占空比和最大电压输入同时发生的情况),唯一我们确定的是变压器有一个稳定的电源电压。 对于单端应用的功率变压器来说,很大一部分开关周期需要保留来保证磁芯的正确复位(正激变换器)。复位时间大小限制电路运行的占空比。不过由于采用交流耦合实现了双向磁化,即使对于单端MOS管驱动变压器也不是问题。
直流电机驱动电路设计 一、直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 1. 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电 器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。 如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 2. 性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。 2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 二、三极管-电阻作栅极驱动
1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。KF347的输入电压范围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压范围溢出的二极管。输入端的两个电阻一个用来限流,一个用来在输入悬空时把输入端拉到低电平。 不能用LM339或其他任何开路输出的比较器代替运放,因为开路输出的高电平状态输出阻抗在1千欧以上,压降较大,后面一级的三极管将无法截止。 2.栅极驱动部分: 后面三极管和电阻,稳压管组成的电路进一步放大信号,驱动场效应管的栅极并利用场效应管本身的栅极电容(大约 1000pF)进行延时,防止H桥上下两臂的场效应管同时导通(“共态导通”)造成电源短路。 当运放输出端为低电平(约为1V至2V,不能完全达到零)时,下面的三极管截止,场效应管导通。上面的三极管导通,场效应管截止,输出为高电平。当运放输出端为高电平(约为VCC-(1V至2V),不能完全达到VCC)时,下面的三极管导通,场效
驱动模块: 驱动模块是用来模拟被测试模块的上一级模块,相当于被测模块的主程序。它接收数据,将相关数据传送给被测模块,启用被测模块,并打印出相应的结果。传统的单元测试包括了驱动模块(driver)和桩模块(stub)。驱动模块的目的很单纯,就是为了访问类库的属性和方法,来检测类库的功能是否正确; Normal002falsefalse false EN-US KO X-NONE MicrosoftInternetExplorer4 如果被测试模块中的函数是提供给其他函数调用的,在设计测试用例时就应该设计驱动模块(Driver)。 举例来说:驱动模块(Driver)可以通过模拟一系列用户操作行为,比如选择用户界面上的某一个选项或者按下某个按钮等,自动调用被测试模块中的函数。驱动模块(Driver)设置,使对模块的测试不必与用户界面真正交互。 桩模块: 桩模块(Stub)是指模拟被测试的模块所调用的模块,而不是软件产品的组成的部分。主模块作为驱动模块,与之直接相连的模块用桩模块代替。在集成测试前要为被测模块编制一些模拟其下级模块功能的“替身”模块,以代替被测模块的接口,接受或传递被测模块的数据,这些专供测试用的“假”模块称为被测模块的桩模块。 如果被测试的单元模块需要调用其他模块中的功能或者函数(method),我们就应该设计一个和被调用模块名称相同的桩模块(Stub)来模拟被调用模块。这个桩模块本身不执行任何功能仅在被调用时返回静态值来模拟被调用模块的行为。 举例说明:如果被测试单元中需要调用另一个模块customer的函数getCustomerAddress(customerID: Integer),这个函数应该查询数据库后返回某一个客户的地址。我们设计的同名桩模块(Stub)中的同名函数并没有真正对数据库进行查询而仅模拟了这个行为,直接返回了一个静态的地址例如"123 Newton Street"。桩模块(Stub)的设置使得单元测试的进行成为一个相对独立且简单的过程。 单元测试: 单元测试(unit testing),是指对软件中的最小可测试单元进行检查和验证。对于单元测试中单元的含义,一般来说,要根据实际情况去判定其具体含义,如C语言中单元指一个函数,Java里单元指一个类,图形化的软件中可以指一个窗口或一个菜单等。总的来说,单元就是人为规定的最小的被测功能模块。单元测试是在软件开发过程中要进行的最低级别的测试活动,软件的独立单元将在与程序的其他部分相隔离的情况下进行测试。 在一种传统的结构化编程语言中,比如C,要进行测试的单元一般是函数或子过程。在像C++这样的面向对象的语言中,要进行测试[1]的基本单元是类。对Ada语言来说,开发人员可以选择是在独立的过程和函数,还是在Ada
中心议题: * 反激式开关电源变压器的设计步骤 解决方案: * 选定原边感应电压V * 确实原边电流波形的参数 * 选定变压器磁芯 * 计算变压器的原边匝数 * 确定次级绕组的参数,圈数和线径 反激式变压器是反激开关电源的核心,它决定了反激变换器一系列的重要参数,如占空比D,最大峰值电流,设计反激式变压器,就是要让反激式开关电源工作在一个合理的工作点上。这样可以让其的发热尽量小,对器件的磨损也尽量小。同样的芯片,同样的磁芯,若是变压器设计不合理,则整个开关电源的性能会有很大下降,如损耗会加大,最大输出功率也会有下降,下面我系统的说一下我算变压器的方法。 算变压器,就是要先选定一个工作点,在这个工作点上算,这个是最苛刻的一个点,这个点就是最低的交流输入电压,对应于最大的输出功率。下面我就来算了一个输入85V到265V,输出5V,2A 的电源,开关频率是100KHZ。 第一步就是选定原边感应电压VOR,这个值是由自己来设定的,这个值就决定了电源的占空比。可能朋友们不理解什么是原边感应电压,是这样的,这要从下面看起,慢慢的来, 这是一个典型的单端反激式开关电源,大家再熟悉不过了,来分析一下一个工作周期,当开关管开通的时候,原边相当于一个电感,电感两端加上电压,其电流值不会突变,而线性的上升,有公式上升了的I=Vs*ton/L,这三项分别是原边输入电压,开关开通时间,和原边电感量.在开关管关断的时候,原边电感放电,电感电流又会下降,同样要尊守上面的公式定律,此时有下降了的I=VOR*toff/L,这三项分别是原边感应电压,即放电电压,开关管关断时间,和电感量.在经过一个周期后,原边电感电流的值会回到原来,不可能会变,所以,有VS*TON/L=VOR*TOFF/L,,上升了的,等于下降了的,懂吗,好懂吧,上式中可以用D来代替TON,用1-D来代替TOOF,移项可得,D=VOR/(VOR+VS)。此即是最大占空比了。比如说我设计的这个,我选定感应电压为80V,VS为90V ,则D=80/(*80+90)=0.47
MOS管及MOS管的驱动电路设计 MOS管及MOS管的驱动电路设计 摘要:本文将对MOSFET的种类,结构,特性及应用电路作一简单介绍,并控讨了一下MOSFET驱动电路设计问题在使用MOS管设计开关电源或者马达驱动电路的时候,大部分人都会考虑MOS的导通电阻,最大电压等,最大电流等,也有很多人仅仅考虑这些因素。这样的电路也许是可以工作的,但并不是优秀的,作为正式的产品设计也是不允许的。 1、MOS管种类和结构 MOSFET管是FET的一种(另一种是JFET),可以被制造成增强型或耗尽型,P沟道或N沟道共4种类型,但实际应用的只有增强型的N沟道MOS管和增强型的P沟道MOS管,所以通常提到NMOS,或者PMOS指的就是这两种。右图是这两种MOS管的符号。 至于为什么不使用耗尽型的MOS管,不建议刨根问底。 对于这两种增强型MOS管,比较常用的是NMOS。原因是导通电阻小且容易制造。所以开关电源和马达驱动的应用中,一般都用NMOS。下面的介绍中,也多以NMOS为主。 在MOS管原理图上可以看到,漏极和源极之间有一个寄生二极管。这个叫体二极管,在驱动感性负载(如马达),这个二极管很重要。顺便说一句,体二极管只在单个的MOS管中存在,在集成电路芯片内部通常是没有的。下图是MOS管的构造图,通常的原理图中都画成右图所示的样子。(栅极保护用二极管有时不画) MOS管的三个管脚之间有寄生电容存在,如右图所示。这不是我们需要的,而是由于制造工艺限制产生的。寄生电容的存在使得在设计或选择驱动电路的时候要麻烦一些,但没有办法避免,在MOS管的驱动电路设计时再详细介绍。
2、MOS管导通特性 导通的意思是作为开关,相当于开关闭合。 NMOS的特性,Vgs大于一定的值就会导通,适合用于源极接地时的情况(低端驱动),只要栅极电压达到4V 或10V就可以了。 PMOS的特性,Vgs小于一定的值就会导通,使用与源极接VCC时的情况(高端驱动)。但是,虽然PMOS可以很方便地用作高端驱动,但由于导通电阻大,价格贵,替换种类少等原因,在高端驱动中,通常还是使用NMOS。 右图是瑞萨2SK3418的Vgs电压和Vds电压的关系图。可以看出小电流时,Vgs达到4V,DS间压降已经很小,可以认为导通。 3、MOS开关管损失 不管是NMOS还是PMOS,导通后都有导通电阻存在,因而在DS间流过电流的同时,两端还会有电压(如 2SK3418特性图所示),这样电流就会在这个电阻上消耗能量,这部分消耗的能量叫做导通损耗。选择导通电阻小的MOS管会减小导通损耗。现在的小功率MOS管导通电阻一般在几十毫欧左右,几毫欧的也有。 MOS在导通和截止的时候,一定不是在瞬间完成的。MOS两端的电压有一个下降的过程,流过的电流有一个上升的过程,在这段时间内,MOS管的损失是电压和电流的乘积,叫做开关损失。通常开关损失比导通损失大得多,而且开关频率越快,损失也越大。
开关电源隔离驱动变压器设计 因为电子设备的电路变得更为复杂,故要求成熟的电气工程设 计参数具有更加临界的数值。在设计电路的每一个阶段,精确的工程计算是基本的要求。同时,在其零部件设计时,这一点也是同样重要的。所以,必须精心地设计开关电源(SMPS中门脉冲驱动变压器的每一个零部件。 门脉冲驱动变压器在开关电源中被要求用来控制电路之间的 同步动作。这些器件用来为开头电源半导件元器件如高压功率MOSFET或IGBTs提供电脉冲。这种变压器也用作电压隔离和阻抗匹配。门脉冲驱动变压器是用来驱动电子开关器件门电路的基本脉冲变压器。设计这类变压器时,是假定其脉冲的上升、下降和上冲时间都是最佳的值。使用中要辨别它们是门脉冲驱动变压器还是其它变压 在基础门脉冲驱动变压器设计中,存在一系列设计变数,其中 的每个变数由其专项应用决定。它们的一些通用简图及其相应的转换关系见图1所示
1^:2 1 :1 1 : 2 3 1-------- ---------- 3 11-14OT ??? ? 2OT - 2OT2OL 40120T . wuw* a I'ttngon. com -4 2— 4 6 ■4OT (a) (b) (c} Ifll 代&门!ft 11咏冲驳戍变!L器的嗎电Jfi细态 典型的门脉冲驱动变压器是用铁氧体磁心设计制造的,这样可以降低成本。常用磁心的外形大多数是EE EER ETD型。它们都是 由“E”型磁心和相应的骨架组成。这些骨架可以采用表面安装法或通 孔安装法装配。在有些情况下,也采用环形磁心设计制作门脉冲驱动变压器。典型的脉冲变压器设计所要求的参数列于表1。
三种常用LED驱动电源详解 时间:2014-5-30 LED电源有很多种类,各类电源的质量、价格差异非常大,这也是影响产品质量及价格的重要因素之一。LED驱动电源通常可以分为三大类,一是开关恒流源,二是线性IC电源,三是阻容降压电源。 1、开关恒流源 采用变压器将高压变为低压,并进行整流滤波,以便输出稳定的低压直流电。开关恒流源又分隔离式电源和非隔离式电源,隔离是指输出高低电压隔离,安全性非常高,所以对外壳绝缘性要求不高。非隔离安全性稍差,但成本也相对低,传统节能灯就是采用非隔离电源,采用绝缘塑料外壳防护。开关电源的安全性相对较高(一般是输出低压),性能稳定,缺点是电路复杂、价格较高。开关电源技术成熟,性能稳定,是目前LED照明的主流电源。 图1:开关恒流隔离式日光灯管电源
图2:开关恒流隔离式电源原理图 图3:开关恒流非隔离式球泡灯电源 图4:开关恒流非隔离式电源原理图 2、线性IC电源 采用一个IC或多个IC来分配电压,电子元器件种类少,功率因数、电源效率非常高,不需要电解电容,寿命长,成本低。缺点是输出高压非隔离,有频闪,要求外壳做好防触电隔离保护。市面上宣称无(去)电解电容,超长寿命的,均是采用线性IC电源。IC驱电源具有高可靠性,高效率低成本优势,是未来理想的LED驱动电源。
图5:线性IC电源 图6:线性IC电源原理图 3、阻容降压电源 采用一个电容通过其充放电来提供驱动电流,电路简单,成本低,但性能差,稳定性差,在电网电压波动时及容易烧坏LED,同时输出高压非隔离,要求绝缘防护外壳。功率因数低,寿命短,一般只适于经济型小功率产品(5W以内)。功率高的产品,输出电流大,电容不能提供大电流,否则容易烧坏,另外国家对高功率灯具的功率因数有要求,即7W以上的功率因数要求大于0.7,但是阻容降压电源远远达不到(一般在0.2-0.3之间),所以高功率产品不宜采用阻容降压电源。市场上,要求不高的低端型的产品,几乎全部是采用阻容降压电源,另外,一些高功率的便宜的低端产品,也是采用阻容降压电源。 图7:阻容降压电源
万方科技学院 模拟电子技术课程设计——基于L298N电机驱动模块的设计与实现 系部电气工程与自动化工程 专业名称电气自动化 班级电气(9)班 姓名乔梁 学号 1116202064 指导教师王允建
基于L298N电机驱动模块设计与实现 目录 一、摘要 (2) 二、步进驱动模块方案 1、方案一 (2) 2、方案二 (2) 三、硬件电路设计 3.1 L298N驱动模块 (2) 3.2 电机控制过程 (4) 3.3 步进电机模块 (6) 3.4 PCB设计 (7) 3.5 转速控制设计 (7) 3.6 基于L298N电机驱动模块的设计实物 (8) 四、实验仿真及调试 4.1 实验仿真结果 (8) 4.2 系统联调 (9) 五、总结 (9) 六、仪器清单 (10) 七、参考文献 (11)
基于L298N电机驱动模块的设计与实现 一、摘要 该设计实现了步进电机正传、反转、加速快转、减速慢转的功能,启动系统后,通过控制脉冲来控制系统,经过L298N驱动电路对脉冲进行处理,输出能直接控制步进电机的脉冲信号,在此基础上,重新分配I/O资源,同时可增加驱动芯片L298N的个数,在负载能力范围允许内,还能实现多台步进电机独立正传、反转、加速快转、减速慢转的控制。 二、步进驱动模块方案 1、方案一: A3972驱动模块是自动收发卡机的设计,是基于双工位(工作通道)的,所 以本驱动模块内部自带电机切换电路,可以驱动分时工作的两路电机,价格昂贵。 2、方案二: L298N是ST公司生产的芯片。主要特点是:工作电压高,最高工作电压可达46V,并且可以驱动两个二相电机,可以直接通过电源来调节输出电压;可以直接用单片机的I/O口提供信号,而且电路简单,使用比较方便。 经实验比较,L298N驱动模块运行可靠,取得效果较好,而且电路的电气性能和散热性能较好,此设计选用L298N驱动模块。 三、硬件电路设计 3.1 L298N驱动模块 L298N(实物图如图一)是ST公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈
步进电机驱动模块设计 内容: 1步进电机及其控制原理 2步进电机驱动电路设计(经Proteus测试) 3 步进电机驱动程序设计 附录步进电机驱动程序 1 步进电机及其控制原理 步进电机是一种将电脉冲转化为角位移的数字控制执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度逐步运行的【19】。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率来控制电机转动速度和加速度,从而达到调速的目的。步进电机由于没有误差累积的特点而广泛应用于各种开环控制。 目前比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等【20】。反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5°,但噪声和振动都很大。永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5°或15°。混合式步进电机是混合了永磁式和反应式的优点。它又分为两相和五相,两相步进角一般为1.8°而五相步进角一般为0.72°。这种步进电机的应用最为广泛。 步进电机必须使用步进电机驱动器才能工作。驱动器针对每一个步进脉冲,按一定的规律向电机各相绕组通电(励磁),以产生必要的转矩,驱动转子运动。步进电机系统的性能除与电机自身的性能有关外,还与驱动器的性能有很大关系【21】。步进电机、驱动器和控制器构成了步进电机控制系统不可分割的三大部分,典型的步进电机控制系统如图4-1所示。
图4-1 步进电机控制系统 微控制器产生控制信号和脉冲信号,脉冲分配器将微控制器产生的信号脉冲转换成有一定逻辑关系的环形脉冲,功率放大器将脉冲分配器输出的环形脉冲放大,用于控制步进电机的转动。 步进电机的控制方案常用的有以下三种【22】: (1)分立控制方案 所谓分立控制就是用电阻、电容、电感等一些元件的组合实现一定的控制功能。传统的控制方法采用电阻、电容等这些分立元件与单片机的直接相连接,而这样就有如下弊端: a.整个开关系统的可靠性得不到保证,不利于长期反复使用。 b.由分立元件设计的开关触点容易发生氧化,缩短了开关的使用寿命。 c.过多使用分立元件,浪费大量的单片机I/O资源,降低了CPU的利用率。 d.大量的使用分立元件,将影响整个系统的读取速度,不利于实时控制。 (2)单个集成芯片控制方案 随着制作工艺的发展,驱动电路部分已经做了很大的改进,开始由集成芯片代替分立元件的控制方案,较分立元件控制方案而言单个集成芯片的可靠性、读取速度、CPU的利用率都有了很大的提高,但是对于程序编写并没有太大方便性可言。 (3)联合集成芯片控制方案 使用联合集成电路芯片不仅可以避免分立元件控制方案的弊端,又可以大大减化程序。 经过以上的比较,本轮椅床的步进电机控制方案选择联合集成芯片控制。2步进电机驱动电路设计 由1节步进电机驱动选择联合集成芯片控制方案,其抗干扰性强,非常适合作为小功率步进电机的专用驱动芯片。在本设计中,选用了L297和L298集成电路作为步进电机的驱动芯片。 L297和L298可以方便的组成步进电机驱动控制器,其中L297是步进电机控制
基于STM32F103x的LCD触摸屏驱动的设计 姓名:______徐进东_______ 学号:______10030227_____ 班级:______10 计卓______
目录 1 概述 (3) 2 LCD液晶显示屏 (3) 2.1 LCD液晶显示屏原理 (3) 2.2 LCD液晶显示屏分类 (3) 3 触摸屏驱动原理概述 (4) 3.1 电阻触摸屏工作原理 (4) 3.2 触摸屏控制实现 (4) 4 设计目标 (4) 5 系统硬件设计 (5) 5.1 STM32微处理器FSMC接口 (5) 5.2 LCD液晶显示屏介绍 (7) 5.3 触摸屏控制板 (8) 6 系统软件设计 (10) 6.1 系统软件结构 (10) 6.2 头文件设计 (11) 6.2 硬件初始化程序 (11) 6.3 3寸LCD模块驱动程序 (14) 6.4 触摸坐标获取程序 (19) 6.5 LCD控制器控制程序 (22) 7 总结 (24)
1 概述 LCD液晶显示屏与触摸屏在嵌入式系统中的应用越来越普及。他们是非常简单、方便、自然的人机交互方式,目前广泛应用于便携式仪器、智能家电、掌上设备等领域。触摸屏与LCD液晶显示技术的紧密结合,成了主流配置。 LCD液晶显示屏(LCD Module , LCM)是一种将液晶显示器件、连接件、集成电路、PCB线路板、背光源以及结构件装配在仪器的组件。 触摸屏技术在我国的应用时间不是太长,但它已经成长为人们最为接受的输入方式。利用这种技术人们只需触碰屏幕就可以对主机进行操作,是人机交互更为方便,直截了当。 本文档是对LCD液晶显示屏和触摸屏驱动的设计做深入介绍。 2 LCD液晶显示屏 2.1 LCD液晶显示屏原理 液晶(Liquid Crystal):是一种介于固态和液态之间的具有规则性分子排列,及晶体的光学各向异性的有机化合物,液晶在受热到一定温度的时候会呈现透明状的液体状态,而冷却则会出现结晶颗粒的混浊固体状态,因为物理上具有液体与晶体的特性,故称之为“液晶”。 液晶显示器LCD(Liquid Crystal Display):是新型平板显示器件。显示器中的液晶体并不发光,而是控制外部光的通过量。当外部光线通过液晶分子时,液晶分子的排列扭曲状态不同,使光线通过的多少就不同,实现了亮暗变化,可重现图像。液晶分子扭曲的大小由加在液晶分子两边的电压差的大小决定。因而可以实现电到光的转换。即用电压的高低控制光的通过量,从而把电信号转换成光像。 2.2 LCD液晶显示屏分类 1.位段型液晶显示模块 位段型液晶显示模块是一种由位段型液晶显示器件与专用的集成电路组装成一体的功能部件。 2.字符型液晶显示模块 字符型液晶显示模块是由字符液晶显示器件与专用的行、列驱动器、控制器、必要的连接件以及结构件装配而成,可以显示数字和西文字符。 3.图形点阵型液晶显示模块 图形点阵型显示模块就是可以动态地显示字符和图片的LCD。图形点阵液晶模块的点阵像素连续排列,行和列在拍布中均没有空隔,不仅可以显示字符,还可以显示连续完整的图像。图形点阵型液晶显示模块有三种类型可供选择:行列驱动型,行列驱动控制型及行列控制型。
相位超前的RC移相式振荡电路图 简单实用的开关电源电路 12v开关电源电路图 12v开关电源电路图 +12V、0.5A单片开关稳压电源的电路如图所示。其输出功率为6W。当输入交流电压在110~260V 范围内变化时,电压调整率Sv≤1%。当负载电流大幅度变化时,负载调整率SI=5%~7%。为简化电路,这里采用了基本反馈方式。
接通电源后,220V交流电首先经过桥式整流和C1滤波,得到约+300V的直流高压,再通过高频变压器的初级线圈N1,给WSl57提供所需的工作电压。从次级线圈N2上输出的脉宽调制功率信号,经VD7、C4、L和C5进行高频整流滤波,获得+12V、0.5A的稳压输出。反馈线圈N3上的电压则通过VD6、R2、C3整流滤波后,将控制电流加至控制端C上。由VD5、R1,和C2构成的吸收回路,能有效抑制漏极上的反向峰值电压。该电路的稳压原理分析如下:当由于某种原因致使Uo↓时,反馈线圈电压及控制端电流也随之降低,而芯片内部产生的误差电压Ur↑时,PWM比较器输出的脉冲占空比D ↑,经过MOSFET和降压式输出电路使得Uo↑,最终能维持输出电压不变。反之亦然。 单端反激开关电源变压器设计总结 单端反激开关电源的变压器实质上是一个耦合电感,它要承担着储能、变压、传递能量等工作。下面对工作于连续模式和断续模式的单端反激变换器的变压器设计进行了总结。 1、已知的参数 这些参数由设计人员根据用户的需求和电路的特点确定,包括:输入电压Vin、输出电压Vout、每路输出的功率Pout、效率η、开关频率fs(或周期T)、线路主开关管的耐压Vmos。 2、计算 在反激变换器中,副边反射电压即反激电压Vf与输入电压之和不能高过主开关管的耐压,同时还要留有一定的裕量(此处假设为150V)。反激电压由下式确定:Vf=VMos-VinDCMax-150V 反激电压和输出电压的关系由原、副边的匝比确定。所以确定了反激电压之后,就可以确定原、副边的匝比了。 Np/Ns=Vf/Vout
HDMI Rx驱动模块开发一硬件电路 1.1 HDMI 连接接口 1.2SIL9135A芯片
与connector通信的信号: 1.2.1 数据输入:输入TMDS信号4路,3路数据,1路时钟; 1.2.2 热插拔:5V与HDP 1.2.3 读取DDC(Display Data Channel)数据: 通过SDA,SCL读取EDID; 1.2.4 CEC(Consumer Electronics Control)消费电子控制通道: 在源与宿之间传递控制信息,时钟与数据都通过1线传输。 如遥控器控制了电视,通过CEC来控制机顶盒的工作。 这里是通过编码器控制信号源。 与编码芯片: 1.2.5 视频输出:时钟,行/场信号,16根数据信号 1.2.6 音频输出: I2S: (Inter-IC Sound Bus) 1根位时钟信号,1根帧同步信号(WS),4根数据信号; 1根静音控制信号,外部时钟信号? 帧同步信号的频率等于采样频率 SCLK的频率=2×采样频率×采样位数 SPDIF(Sony/Philip Digital Interface): 同轴音频接口; 双相标记编码技术,只使用一条传输导线; MCLK 1.2.7 中断输出:一根中断输出信号线; 二基本功能 2.1 热插拔检测 HDMI没有插入时,CNW5602的HDP信号为高电平3.3V; 插入后,变为conector的HDP电平,应该为低电平; CNW5602检测热插拔事件。 2.2 DDC数据读写 2.2.1 CNW5602写EDID: 读取EDID文件; 通过I2C写入EDID数据; 触发信号源读取。 2.2.2 信号源读取EDID:HDCP(数字内容保护) 信源确认插入; 通过DDC通道读取EDID。 2.2.3 HDMI芯片与驱动需要对EDID执行的处理逻辑? https://www.doczj.com/doc/5214012300.html,/ARTICLE_IMAGES/200804/20080425_HA_DT_HP_30.PDF?SOURC
无人车电机驱动设计报告 学院:仪器与电子学院 专业:测控技术与仪器 学号姓名:1306014208王浩宇 学号姓名:1306014211崔恒瑞 学号姓名:1306014235高晟淇 学号姓名:1306014244张可迪 起迄日期: 2016年4月5日~4月15日设计地点: 主楼12层1217# 指导教师: 唐军、申冲、段俊萍 2016年4 月17 日
无人车电机驱动设计报告 一.问题综述 现代工业中,自动化发展占据了行业发展的重要地位,自动化是当今工业中的重中之重[1],为了与时代的发轨迹接轨,从细微处培养学生,现我们需要对一飞思卡尔C型车模设计电机驱动电路[2],要求可正常启动电机、按控制信号进行速度控制并可以进行正反转切换, 二.设计思路 驱动电机需要较大电流,在使用专用电池作为电源来满足电源需求可以提供足够电流的同时,还需要保证传输线路也可承受足够大的电流,因并且为了延长电池使用时间,提高电路效率,需要减小在传输线路上的功耗,还可减小电路体积。[4] 三.方案比较与论证 3.1 电路拓扑选择 可选拓扑结构有四分之一桥,半桥,以及全桥电路,四分之一桥电路简单,但对开关管压力较大;半桥电路驱动能力强,对开关管压力较小,但不能正反转;全桥驱动结构相较而言稍复杂[3],如图1,但其驱动方向灵活,负载能力极强,因此选用全桥电路作为基本驱动拓扑。驱动原理如图2。 图1 全桥
图2 全桥驱动示意图 3.2 开关器件选择 可选用的开关器件有继电器,mos管,三极管,晶闸管,igbt等,其中,继电器导通电阻极低,可通过电流较大,但由于对控制信号的频响性能较差,无法适应上千赫兹的控制信号,因此不予考虑; 三极管对控制信号敏感,控制信号的幅值可任意选择,但导通电阻过大,在驱动电机时的大电流情况下功耗较大,同时还会有较大压降,不予考虑。 晶闸管本身在作为驱动开关管时具有物理缺陷,在此不予讨论。 场管对控制信号要求较高,有导通下限电压,但导通后导通电阻可以只有几毫欧,可承受较大电流,同时对高频信号的频响性能很好,因此选择大功率场管作为驱动电路的开关器件。 在此我们选择IRF3710作为开关管,其具有100V漏源耐压,最大57A长时间漏级电流,以及导通电阻最大仅23mΩ的优秀特性。在本次设计中其漏源电压不大于30V,导通时间不大于0.1ms,如图3,在安全使用区域内。
开关电源中的变压器隔离驱动电路(二) 普高(杭州)科技开发有限公司 张兴柱 博士 图1(a)是另一种隔离驱动电路,其原边类似于不对称半桥中的接法,副边的电容和二极管 (a) (b) 图1: 隔离驱动电路#2 来实现隔离后信号的恢复,当原边和副边匝数相同时,该隔离驱动电路在二极管D1上的波形将与隔离前的驱动信号具有完全相同的形状,而且其幅度为Vcc_s 。2R 、3R 、1ZD 的作用与隔离驱动电路#1中对应的元件类似。这个隔离驱动电路的占空比没有限制,其变压器对称地工作于B-H 的I 、III 象限,变压器的激磁电流平均值为零。如前面所说的,该隔离驱动变压器的设计可先按原则选好铁芯的材料和铁芯的形状及尺寸,然后按下面的公式计算匝数: 8_102)1(××?= s c m s cc p f A B V D D N (匝) 其中:sat m B B <,为工作磁密幅度,单位(Gass );c A 为所选铁芯的截面积,单位2)(cm ,D 为驱动信号的占空比,s f 驱动信号的频率,单位为(Hz ) ,s cc V _为隔离驱动电路原边供
电电源,单位(V ),显然在5.0=D 时,上式最大,所以有: 8_10125.0××= s c m s cc p f A B V N (匝) 对计算的匝数取整数,并取p s N N =,然后在所选择的铁芯上按安规要求绕制这两个绕组,看看是否可以绕下,如果能够绕下,且实验波形没有失真,则该隔离变压器的设计就是成功的,否则就要选择一个大一些的铁芯来重新进行计算。从变压器匝数计算公式可知,同样频率、同样截面积的铁芯,在隔离驱动电路#2中的变压器匝数会远少于隔离驱动电路#1中(昨天介绍的)的变压器匝数,所以当处理的功率相同时,隔离驱动电路#2中的变压器会比隔离驱动电路#1中的变压器小。 图1(a)的隔离驱动电路,在产品的大动态过程或电源保护后再恢复工作的过程中,常会因为二极管1D 的没有及时导通,而导致其控制的MOSFET 不能被可靠关断,从而损坏主电路。图1(b)是用一个PNP 三极管3Q 、一个电阻4R 和一个电容3C 组成的电路来代替二极管1D ,以保证只要变压器的副边一有负电压,三极管3Q 就会立即导通,从而确保其控制的MOSFET 无论在什么样的大动态下,都能可靠关断。