北京鉴衡认证中心 风力发电机组载荷计算 北京鉴衡认证中心 发言人:韩炜 2008-4-14 w w w .s i m o s o l a r .c o m
北京鉴衡认证中心 内容概要 1. 风力发电机组载荷计算目的 2. 风力发电机组载荷特点 3. 风力发电机组载荷计算 w w w .s i m o s o l a r .c o m
北京鉴衡认证中心 风力发电机组载荷计算目的 ? 对于设计:提供强度分析载荷依据,确保各部 件承载在设计极限内;优化运行载荷,提高机 组可靠性。 ? 对于认证:确保载荷计算应用了适当的方法, 工况假定全面且符合标准要求,结果真实可靠。w w w .s i m o s o l a r .c o m
北京鉴衡认证中心 风力发电机组载荷特点 ? 风 ? 空气动力学 ? 叶片动力学 ? 控制 ? 传动系统动力学 ? 电力系统 ? 塔架动力学 ? 基础 w w w .s i m o s o l a r .c o m
风力发电机组载荷计算标准 ? 陆上风机:GB18451.1(2001);IEC61400-1(1999, 2005);GL Guideline2003;… ? 海上风机:IEC61400-3;GL Guideline (Offshore) 2005? DNV- OS-J101 … 风力发电机组载荷计算 w w w. s i m o s o l a r.c o m 北京鉴衡认证中心
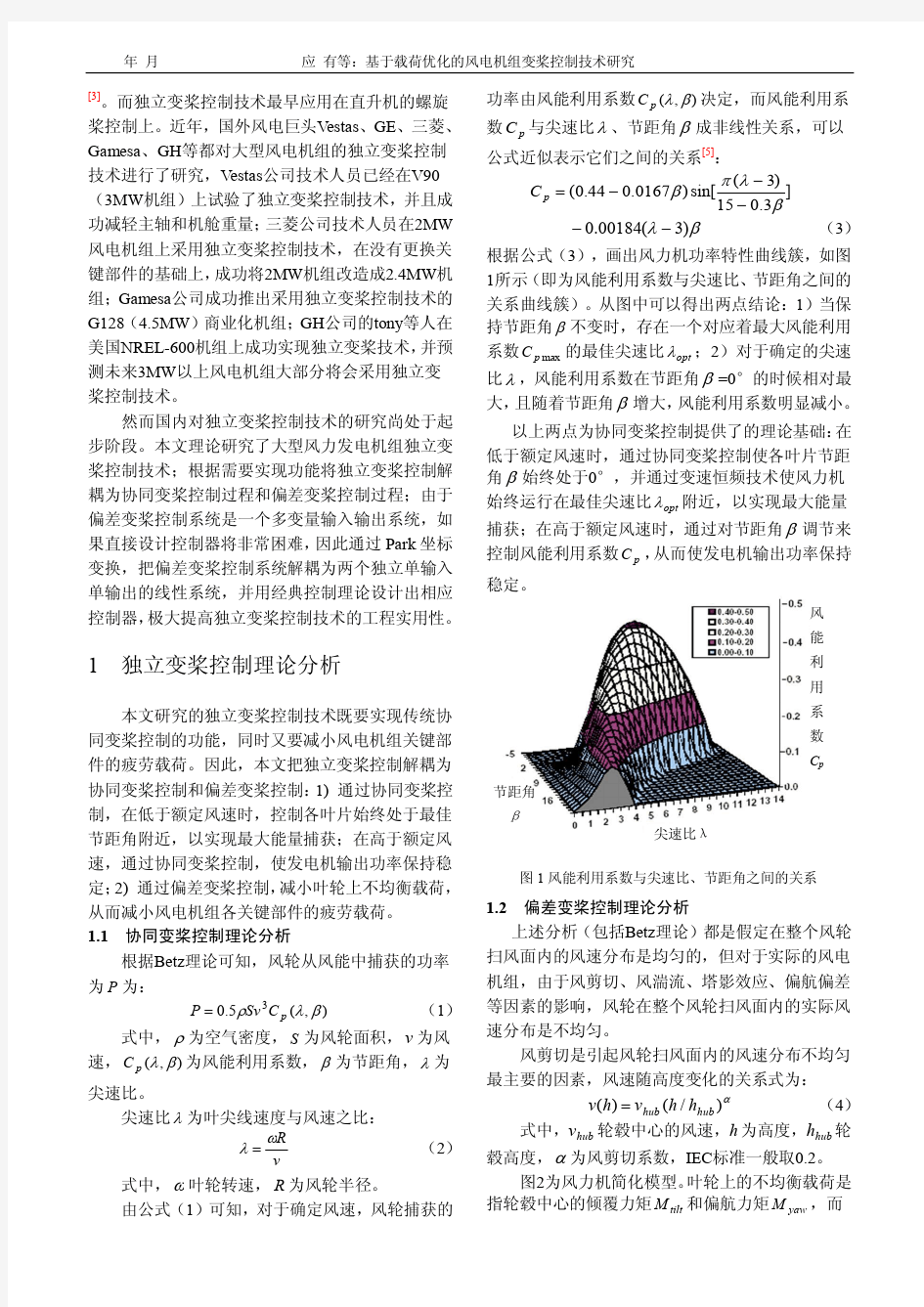
北京鉴衡认证中心 风力发电机组设计等级 (IEC61400-1:1999) 级别 Ⅰ Ⅱ Ⅲ Ⅳ S V ref [m/s] 50 42.5 37.5 30 V ave [m/s] 10 8.5 7.5 6 A I 15 [-] 0.18 0.18 0.18 0.18 a [-] 2 2 2 2 B I 15 [-] 0.16 0.16 0.16 0.16 a [-] 3 3 3 3 由设计 者规定 各参数 注: V ref :轮毂处参考风速 V ave :轮毂处平均风速 I 15:风速15m/s时的湍流强度 a: 斜度参数 风力发电机组载荷计算 w w w .s i m o s o l a r .c o m
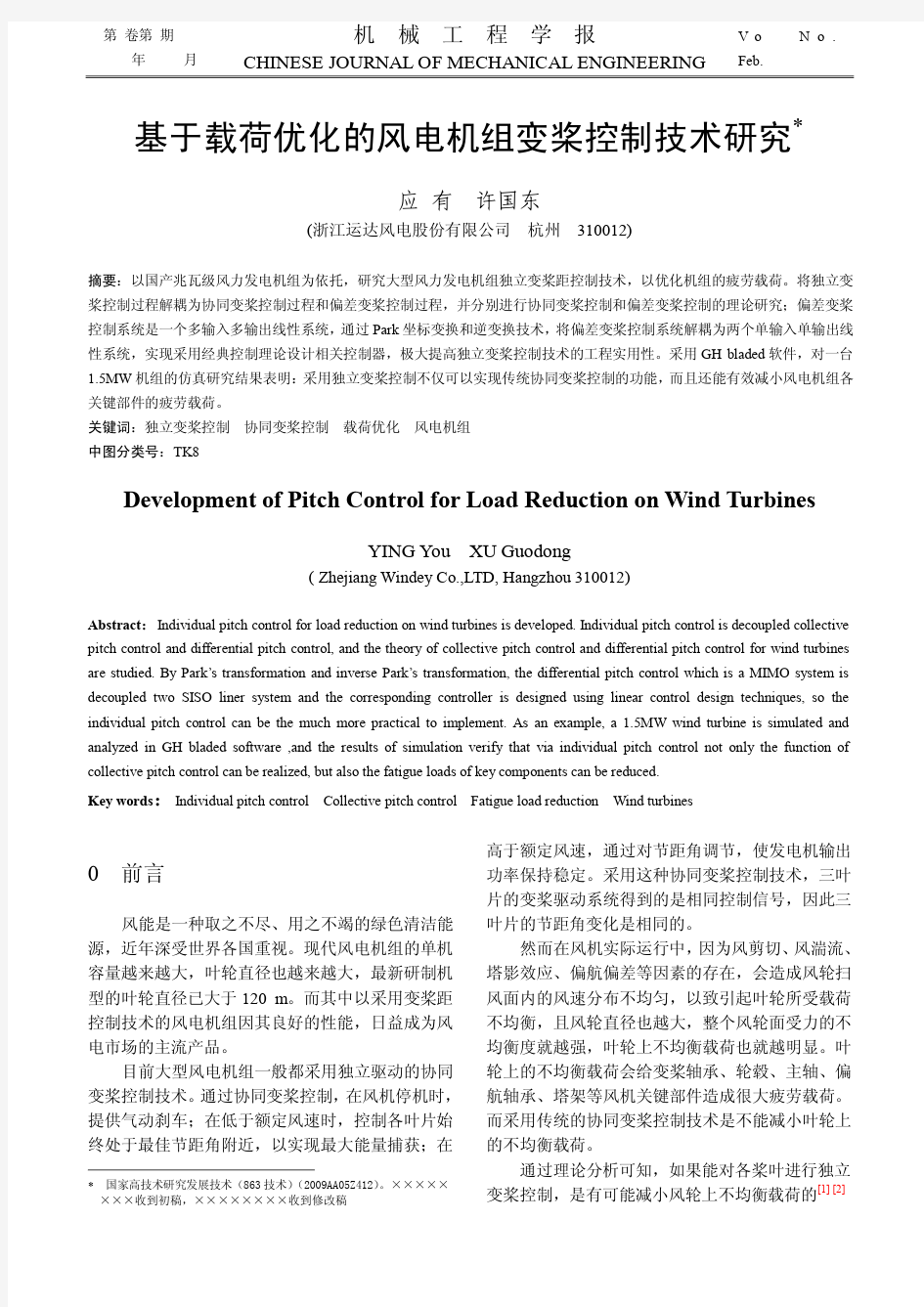
变桨距风力发电机组的运行状态 从空气动力学角度考虑。当风速过高时,只有通过调整桨叶节距,改变气流对叶片的角度,从而改变风力发电机组获得的空气动力转矩,才能使功率输出保持稳定。同时,风力机在启动过程中也需要通过变距来获得足够的启动转矩。 变桨距风力发电机组根据边距系统所起的作用可分为三种运行状态,即风力发电机组的启动状态(转速控制)、欠功率状态(不控制)和额定功率状态(功率控制)。 1)启动状态变距风轮的桨叶在静止时,节距角为90°,这时气流对桨叶不产生转矩,整个桨叶实际上是一块阻尼板。当风速达到启动风速时,桨叶向0°方向转动,直接到气流对桨叶产生一定的攻角,风轮开始启动。在发电机并入电网以前,变桨距系统的节距给定值由发电机转速信号控制。转速控制器按照一定的速度上升斜率给出速度参考值,变桨距系统根据给定的速度参考值,调整节距角,进行所谓的速度控制。为了确保并网平稳,对电网产生尽可能小的冲击,变桨距系统可以在一定时间内保持发电机的转速在同步转速附近,寻找最佳时机并网。虽然在主电路中也采用了软并网技术,但由于并网过程的时间短,冲击小,可以选用容量较小的晶闸管。 为了使控制过程比较简单,早期的变桨距风力发电机在转速达到发电机同步转速前对桨叶节距并不加以控制。在这种情况下,桨叶节距只是按所设定的变桨距速度,将节距角向0°方向打开,直到发电机转速上升到同步转速附近,变桨距系统才开始投入工作。转速控制的给定值是恒定的,即同步转速。转速反馈信号与给定值进行比较。当转速超过同步转速时,桨叶节距就迎风面积小的方向转动一个角度,反之则向迎风面积增大的方向转动一个角度。当转速在同步转速附近保持一定时间后发电机即并入电网。 2)欠功率状态欠功率状态是指发电机并入电网后,由于风速低于额定风速,发电机在额定功率以下的低功率状态下运行。与转速控制道理相同,在早期的变桨距风力发电机组中,对欠功率状态不加控制。这时的变桨距风力发电机组与定桨距风力发电机组相同,其功率输出完全取决于桨叶的气动性能。 3)额定功率状态当风速达到或超过额定风速后,风力发电机组进入
酒泉职业技术学院 毕业设计 题目:风力发电机组偏航系统的控制学院:酒泉职业技术学院 班级: 10级风电(1)班 姓名:李世辉 指导教师:赵玉丽 完成日期: 2012 年 12 月 20 日
摘要 随着社会经济的发展,人们对电的需求日益提高。以石油、煤炭、天然气为的常规能源,不仅资源有限,而且还会在使用中造成严重的环境污染。在我们进入21世纪的今天,世界能源结构正在孕育着重大的转变,即由矿物能源系统向以可再生能源为基础的可持续能源系统转变。风能作为取之不尽,用之不竭的绿色清洁能源己受到全世界的重视,而风力机的偏航系统能使风能得到更好的利用,所以偏航系统的设计非常的重要。 本设计首先分析了偏航系统的工作原理,然后以三菱PLC作为控制器,触摸屏为监控器,设计了硬件系统模块,整个硬件系统采用了闭环控制,并说明了开环控制的缺点。根据偏航控制要求,设计了自动对风控制算法,自动解缆控制算法,90°背风控制算法,不仅提高了风能利用率,增大了发电效率,而且还保证了整个系统的安全性、稳定性,让风力发电机更好的运行。 关键词:偏航系统硬件设计自动对风自动解缆
目录 摘要 (1) 第一章概述.......................................................错误!未定义书签。 1.1 设计背景 (2) 1.2 设计研究意义 (2) 1.3 国内外风力发电概况 (2) 1.3.1 世界风电发展 (2) 1.3.2 我国风电发展 (3) 第二章偏航控制系统功能简介和原理 (3) 2.1 偏航控制系统的功能............................................错误!未定义书签。 2.2 风力发电机组偏航控制原理......................................错误!未定义书签。 第三章偏航系统的控制过程.........................................错误!未定义书签。 3.1 自动偏航控制..................................................错误!未定义书签。 3.1.1 自动偏航传感器ASS状态...................................错误!未定义书签。 3.1.2 参数说明和电机运行状态...................................错误!未定义书签。 3.1.3 偏航控制流程图..........................................错误!未定义书签。 3.1.4 偏航电机电气连接原理图..................................错误!未定义书签。 3.1.5 偏航对风控制PLC程序....................................错误!未定义书签。 3.2 90°侧风控制................................................错误!未定义书签。 3.3 人工偏航控制.................................................错误!未定义书签。 3.4 自动解缆控制.................................................错误!未定义书签。 第四章总结 (5) 参考文献 (12) 致谢 (13)
2017年度申报专业技术职务任职资格 评审答辩论文 题目:风电场风电机组优化有功功率控制的研究 作者姓名:李亮 单位:中核汇能有限公司 申报职称:高级工程师 专业:电气 二Ο一七年六月十二日
摘要 随着风电装机容量的与日俱增,实现大规模的风电并网是风电发展的必然趋势。然而,由于风能是一种波动性、随机性和间歇性极强的清洁能源,导致风电并网调度异于常规能源。基于此,本文将针对风电场层的有功功率分配开展工作,主要工作概括如下: (1)对风电机组和风电场展开研究,分析风力发电机组运行特性、风力发电机组控制策略、风电场的控制策略。 (2)提出了一种简单有效的风电场有功功率分配算法,可以合理利用各机组的有功容量,优化风电场内有功调度分配指令,减少机组控制系统动作次数,平滑风电机组出力波动。 (3)优化风机控制算法后,通过现场实际采集数据将所提方法与现有方法进行了比较,验证了所提方法的合理性。 关键词:风电机组、风电场、有功功率控制、AGC
Abstract With increasing wind power capacity, to achieve large-scale wind power is an inevitable trend of wind power development. However, since the wind is a volatile, random and intermittent strong clean energy, resulting in wind power dispatch is different from conventional energy sources. And the wind farm is an organic combination for a large number of wind turbines, wind farms under active intelligent distribution layer hair is also included in the grid scheduling section. Based on this, the active allocation and scheduling for grid scheduling side active layer wind farm work, the main work is summarized as follows: (1)Wind turbines and wind farms to expand research, in-depth analysis of the operating characteristics of wind turbines, wind turbine control strategy, control strategies of wind farms. (2)This paper proposes a simple and effective wind power active power allocation algorithm, can reasonable use each unit capacity, according to the optimization of wind farms in active dispatching command, decrease The Times of turbine control system action smooth wind power output fluctuation unit. (3)After optimization of the fan control algorithm, through the practical field data collected will be presented method are compared with those of the existing method, the rationality of the proposed method was verified. Keywords:wind turbine, wind farm, active power control
1 范围 1.0.1 本标准规定了风电场风电机组塔架地基基础设计的基本原则和方法,涉及地基基础的工程地质条件、环境条件、荷载、结构设计、地基处理、检验与监测等内容。 1.0.2 本标准适用于新建的陆上风电场风电机组塔架的地基基础设计。工程竣工验收和已建工程的改(扩建)、安全定检,应参照本标准执行。 1.0.3 风电场风电机组塔架的地基基础设计除应符合本标准外,对于湿陷性土、多年冻土、膨胀土和处于侵蚀环境、受温度影响的地基等,尚应符合国家现行有关标准的要求。
2 规范性引用文件 下列标准中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用标准,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些标准的最新版本。凡是不注日期的引用标准,其最新版本适用于本标准。 GB 18306 中国地震动参数区划图 GB 18451.1 风力发电机组安全要求 GB 50007 建筑地基基础设计规范 GB 50009 建筑结构荷载设计规范 GB 50010 混凝土结构设计规范 GB 50011 建筑抗震设计规范 GB 50021 岩土工程勘察规范 GB 50046 工业建筑防腐蚀设计规范 GB 50153 工程结构可靠度设计统一标准 GB 60223 建筑工程抗震设防分类标准 GB 50287 水力发电工程地质勘察规范 GBJ 146 粉煤灰混凝土应用技术规范 FD 002—2007 风电场工程等级划分及设计安全标准 DL/T 5082 水工建筑物抗冰冻设计规范 JB/T10300 风力发电机组设计要求 JGJ 24 民用建筑热工设计规程 JGJ 94 建筑桩基技术规范 JGJ 106 建筑基桩检测技术规范 JTJ 275 海港工程混凝土防腐蚀技术规范
随着国家新能源发展战略的提出和实施,我国风电产业进入跨越式发展的阶段。本文从分析我国风力发电的现状出发,在总结分析风力发电技术发展的基础上,对我国风电发展过程中存在的主要问题进行了探讨分析,提出了相关建议。 关键词:风力发电;现状;技术发展 能源、环境是当今人类生存和发展所要解决的紧迫问题。常规能源以煤、石油、天然气为主,它不仅资源有限,而且造成了严重的大气污染。因此,对可再生能源的开发利用,特别是对风能的开发利用,已受到世界各国的高度重视。风电是可再生、无污染、能量大、前景广的能源,大力发展风电这一清洁能源已成为世界各国的战略选择。我国风能储量很大、分布面广,开发利用潜力巨大。近年来我国风电产业及技术水平发展迅猛,但同时也暴露出一些问题。总结我国风电现状及其技术发展,对进一步推动风电产业及技术的健康可持续发展具有重要的参考价值。 1我国风力发电的现状 2005年2月,我国国家立法机关通过了《可再生能源法》,明确指出风能、太阳能、水能、生物质能及海洋能等为可再生能源,确立了可再生能源开发利用在能源发展中的优先地位。2009年12月,我国政府向世界承诺到2020年单位国内生产总值二氧化碳排放比2005年下降40%~45%,把应对气和变化纳入经济社会发展规划,大力发展包括风电在内的可再生能源与核能,争取到2020年非化石能源占一次能源消费比重达到15%左右。 随着新能源产业成为国家战略新兴产业规划的出台,风电产业迅猛发展,有望成为我国国民经济增长的一个新亮点。 我国自上世纪80年代中期引进55kW容量等级的风电机投入商业化运行开始,经过二十几年的发展,我国的风电市场已经获得了长足的发展。到2009年底,我国风电总装机容量达到2601万kW,位居世界第二,2009年新增装机容量1300万kW,占世界新增装机容量的36%,居世界首位[1,2]。可以看出,我国风电产业正步入一个跨越式发展的阶段,预计2010年我国累计装机容量有望突破4000万kW。 从技术发展上来说,我国风电企业经过“引进技术—消化吸收—自主创新”的三步策略也日益发展壮大。随着国内5WM容量等级风电产品的相继下线,以及国内兆瓦级机组在风电市场的普及,标志我国已具备兆瓦级风机的自主研发能力。同时,我国风电装备制造业的产业集中度进一步提高,国产机组的国内市场份额逐年提高。目前我国风电机组整机制造业和关键零部件配套企业已能已能基本满足国内风电发展需求,但是像变流器、主轴轴承等一些技术要求较高的部件仍需大量进口。因此,我国风电装备制造业必须增强技术上的自主创新,加强风电核心技术攻关,尤其是加强风电关键设备和技术的攻关。 2风力发电的技术发展 风力发电技术是涉及空气动力学、自动控制、机械传动、电机学、力学、材料学等多学科的综合性高技术系统工程。目前在风能发电领域,研究难点和热点主要集中在风电机组大型化、风力发电机组的先进控制策略和优化技术等方面。 2.1风力发电机组机型及容量的发展 现代风力发电技术面临的挑战及发展趋势主要在于如何进一步提高效率、提高可靠性和降低成本。作为提高风能利用率和发电效率的有效途径,风力发电机单机容量不断向大型化发展。从20世纪80年代中期的55kW容量等级的风电机组投入商业化运行开始,至1990年达到250kW,1997年突破1MW,1999年即
兆瓦级风电机组偏航系统的设计 自动化 K031241720 李江 摘要风能是绿色能源。我国在风力发电上的投入和研究也正进入一个快速发展的时期。偏航控制一直未能取得有效的发展。针对这方面的问题,本论文展开了相应的设计。在设计过程主控制器选用了德国beckhoff的软PLC,文中对其硬件模块的组态和编程环境TwinCA T 以及现场通讯协议Profibus-DP做了详细介绍和设计说明。偏航电机的控制选用了西门子G120变频器实现了变频调速,在恶劣环境下减小了偏航系统的振动。运用TwinCAT编程软件对偏航系统的四个部分:自动偏航、自动解缆、自动润滑、人工偏航的程序进行了编写。最后,在个人计算机进行了编译、下载和运行,在联机模式下,通过TwinCAT实时可视化的画面对各种状态进行了模拟运行,该偏航系统在各种状态下呈现出很好的控制效果。 关键词风力发电;偏航控制系统;软PLC Abstract Wind energy is a green energy. Wind power will fleetly develop in China,too. the technology for yaw syste m wasn’t still developed for a long time.Therefore,aim at this subject,related research and design will be reported in this thesis.Master controller used the German beckhoff soft PLC in the design process, Paper, the hardware modules to their configuration and programming environment TwinCAT and PROFIBUS-DP communication protocol site a detailed description and design specification. Electric motor control yaw selected Siemens G120 frequency converter frequency control in harsh environments reduces the yaw system vibration. TwinCAT programming software using the four parts of the yaw system: automatic yaw, automatic Cable release ,automatic lubrication, artificial yaw program was written. Finally, in the personal computer to compile, download and run, in online mode, real-time visualization by TwinCAT picture of the various state simulation run, the yaw system in various states shows good control effect. Key words Wind Power Generation; Yaw Control System; soft PLC 前言 能源是人类生存的基本要素,国民经济发展的主要物质基础。由于化石资源的日益枯竭和人类对全球环境恶化的倍加关注,风力发电技术也随之得到迅猛发展。偏航控制机构是风力机特有的伺服系统,用于控制风电机组跟踪变化的风向,并且当电缆发生缠绕时,能够自动解缆的功能,并能够定时润滑偏航机械机构。1 偏航控制系统硬件设计及选型 风力机的偏航系统由偏航检测机构、偏航控制机构和偏航驱动机构三大部分组成,其中偏航检测机构包括:风传感器、机舱位置传感器;偏航控制机构包括:偏航控制器、变频器;机械驱动机构包括:偏航轴承、偏航润滑系统、偏航驱动装置、偏航制动器。 1.1偏航检测机构 风向信号作为偏航控制系统中最关键的
风力发电机组偏航系统详细介绍2012-12-15 资讯频道 偏航系统的主要作用有两偏航系统是水平轴式风力发电机组必不可少的组成系统之一。 使风力发电机组的风轮始终处于迎风状态,其一是与风力发电机组的控制系统相互配合,个。以保障风力发其二是提供必要的锁紧力矩,充分利用风能,提高风力发电机组的发电效率;被动风力发电机组的偏航系统一般分为主动偏航系统和被动偏航系统。电机组的安全运行。舵轮常见的有尾舵、偏航指的是依靠风力通过相关机构完成机组风轮对风动作的偏航方式,常见的有主动偏航指的是采用电力或液压拖动来完成对风动作的偏航方式,和下风向三种;通常都采用主动偏航的齿轮驱动对于并网型风力发电机组来说,齿轮驱动和滑动两种形式。形式。 1.偏航系统的技术要求 1.1. 环境条件 在进行偏航系统的设计时,必须考虑的环境条件如下: 1). 温度; 2). 湿度; 3). 阳光辐射; 雨、冰雹、雪和冰;4). 5). 化学活性物质; 机械活动微粒;6). 盐雾。风电材料设备7). 近海环境需要考虑附加特殊条件。8). 应根据典型值或可变条件的限制,确定设计用的气候条件。选择设计值时,应考虑几 气候条件的变化应在与年轮周期相对应的正常限制范围内,种气候条件同时出现的可能性。不影响所设计的风力发电机组偏航系统的正常运行。 1.2. 电缆 必须使电缆有足够为保证机组悬垂部分电缆不至于产生过度的纽绞而使电缆断裂失效, 电缆悬垂量的多少是根据电缆所允许的扭转角度确定的悬垂量,在设计上要采用冗余设计。的。阻尼1.3. 偏航系统在机组为避免风力发电机组在偏航过程中产生过大的振动而造成整机的共振, 阻尼力矩的大小要根据机舱和风轮质量总和的惯性力矩来偏航时必须具有合适的阻尼力矩。只有在其基本的确定原则为确保风力发电机组在偏航时应动作平稳顺畅不产生振动。确定。阻尼力矩的作用下,机组的风轮才能够定位准确,充分利用风能进行发电。 1.4. 解缆和纽缆保护 偏航系统的偏航动解缆和纽缆保护是风力发电机组的偏航系统所必须具有的主要功能。 所以在偏航系统中应设置与方向有关的计数作会导致机舱和塔架之间的连接电缆发生纽绞,检测装置或类一般对于主动偏航系统来说,装置或类似的程序对电缆的纽绞程度进行检测。对于被动偏航系统检测装置或类似似的程序应在电缆达到规定的纽绞角度之前发解缆信号;偏航系并进行人工解缆。的程序应在电缆达到危险的纽绞角度之前禁止机舱继续同向旋转,一般与偏航圈统的解缆一般分为初级解缆和终极解缆。初级解缆是在一定的条件下进行的,这个装置的控制逻纽缆保护装置是风力发电机组偏航系统必须具有的装置,数和风速相关。辑应具有最高级别的权限,一旦这个装置被触发,则风力发电机组必须进行紧急停机。偏航转速 1.5. 1 对于并网型风力发电机组的运行状态来说,风轮轴和叶片轴在机组的正常运行时不可避免的产生陀螺力矩,这个力矩过大将对风力发电机组的寿命和安全造成影响。为减少这个力矩对风力发
风力发电机组载荷计算 北京鉴衡认证中心 发言人:韩炜 2008-4-14 北京鉴衡认证中心
内容概要 1. 风力发电机组载荷计算目的 2. 风力发电机组载荷特点 3. 风力发电机组载荷计算 北京鉴衡认证中心
风力发电机组载荷计算目的 ? 对于设计:提供强度分析载荷依据,确保各部 件承载在设计极限内;优化运行载荷,提高机 组可靠性。 ? 对于认证:确保载荷计算应用了适当的方法, 工况假定全面且符合标准要求,结果真实可靠。北京鉴衡认证中心
风力发电机组载荷特点 ? 风 ? 空气动力学 ? 叶片动力学 ? 控制 ? 传动系统动力学 ? 电力系统 ? 塔架动力学 ? 基础 北京鉴衡认证中心
风力发电机组载荷计算 风力发电机组载荷计算标准 ? 陆上风机:GB18451.1(2001);IEC61400-1(1999, 2005);GL Guideline2003;… ? 海上风机:IEC61400-3;GL Guideline (Offshore) 2005? DNV- OS-J101 … 北京鉴衡认证中心
北京鉴衡认证中心 风力发电机组设计等级 (IEC61400-1:1999) 级别 Ⅰ Ⅱ Ⅲ Ⅳ S V ref [m/s] 50 42.5 37.5 30 V ave [m/s] 10 8.5 7.5 6 A I 15 [-] 0.18 0.18 0.18 0.18 a [-] 2 2 2 2 B I 15 [-] 0.16 0.16 0.16 0.16 a [-] 3 3 3 3 由设计 者规定 各参数 注: V ref :轮毂处参考风速 V ave :轮毂处平均风速 I 15:风速15m/s时的湍流强度 a: 斜度参数 风力发电机组载荷计算
风力发电机组气动特性分析与载荷计算 目录 1前言 (2) 2风轮气动载荷 (2) 2.1 动量理论 (2) 2.1.1 不考虑风轮后尾流旋转 (2) 2.1.2 考虑风轮后尾流旋转 (3) 2.2 叶素理论 (4) 2.3 动量──叶素理论 (4) 2.4 叶片梢部损失和根部损失修正 (6) 2.5 塔影效果 (6) 2.6 偏斜气流修正 (6) 2.7 风剪切 (6) 3风轮气动载荷分析 (7) 3.1周期性气动负载................................................................................... 错误!未定义书签。 4.1载荷情况DLC1.3 (10) 4.2载荷情况DLC1.5 (10) 4.3载荷情况DLC1.6 (10) 4.4载荷情况DLC1.7 (11) 4.5载荷情况DLC1.8 (11) 4.6载荷情况DLC6.1 (11)
1 前言 风力发电机是靠风轮吸取风能的,将气流动能转为机械能,再转化为电能输送电网,风力机气动力学计算是风力机设计中的一项重要工作。特别是对于大、中型风机,其意义更为重大。风力机处于自然大气环境中,大气紊流、风剪切、风向的变化(侧偏风)和塔影效应等,这些现象使叶片受到非常复杂气动载荷的作用,对风力机的气动性能和结构疲劳寿命产生很大的影响。对一台大型风力发电机组来说,除风轮叶片产生机组的气动载荷外,机舱和支撑风轮和机舱的塔筒也产生气动载荷,这些都对机组的载荷产生影响。 2 风轮气动载荷 目前计算风力发电机的气动载荷有动量—叶素理论、CFD 等方法。动量—叶素理论是将风轮叶片沿展向分成许多微段,称这些微段为叶素,在每个叶素上的流动相互之间没有干扰,叶素可以认为是二元翼型,在这些微段上运用动量理论求出作用在每个叶素上的力和力矩,然后沿叶片展向积分,进而求得作用在整个风轮上的力和力矩,算得旋翼的拉力和功率。动量—叶素理论形式比较简单,计算量小,便于工程应用,估算机组初始设计时整机的气动性能,被广泛用于风力机的设计和性能计算,而且还用来确定风力机的动态载荷,不断地被进一步改进和完善。CFD 数值计算不需要对数学模型作近似处理,直接对流体运动进行数值模拟,从物理意义上说,数值求解N-S 方程的CFD 方法应该是最全面准确计算风力机气动特性的方法。但是,由于极大的计算工作量,数值计算的稳定性等原因,目前CFD 求解N-S 方程方法还远不能作为风力机气动设计和研究的日常工具。作为解决工程问题的工具还不太实际。为此在计算中应用动量—叶素理论方法来计算机组的气动载荷。 2.1 动量理论 动量理论是经典的风力机空气动力学理论。风轮的作用是将风的动能转换成机械能,但是它究竟能够吸收多大的风的动能就是动量理论回答的问题。下面分不考虑风轮后尾流旋转和考虑风轮后尾流旋转两种情况应用动量理论。 2.1.1 不考虑风轮后尾流旋转 首先,假设一种简单的理想情况: (1)风轮没有偏航角、倾斜角和锥度角,可简化成一个平面桨盘; (2)风轮叶片旋转时不受到摩擦阻力; (3)风轮流动模型可简化成一个单元流管; (4)风轮前未受扰动的气流静压和风轮后的气流静压相等,即p 1 = p 2; (5)作用在风轮上的推力是均匀的; (6)不考虑风轮后的尾流旋转。 将一维动量方程用于风轮流管,可得到作用在风轮上的轴向力为 ()21V V m T -= (1) 式中 m 为流过风轮的空气流量 T AV m ρ= (2) 于是 ()21V V AV T T -=ρ (3) 而作用在风轮上的轴向力又可写成 () -+-=p p A T (4) 由伯努利方程可得 ++=+p V p V T 222121ρρ (5) -+=+p V p V T 22222ρρ (6) 根据假设,p 1 = p 2,(5)式和(6)式相减可得
论不同风况对风电机组疲劳载荷的影响 发表时间:2018-04-11T15:37:41.073Z 来源:《电力设备》2017年第32期作者:王青磊[导读] 摘要:风力发电机组总体载荷计算评估是风力机设计以及风电场风机选型中的一项重要工作,特别是对于大型MW级风机,其意义更为重大。 (国家电投集团湖北绿动新能源有限公司湖北武汉 430071) 摘要:风力发电机组总体载荷计算评估是风力机设计以及风电场风机选型中的一项重要工作,特别是对于大型MW级风机,其意义更为重大。风机载荷计算评估包括极限载荷评估和疲劳载荷评估。从计算角度分析,影响风机疲劳载荷的主要因素包括风电场的湍流强度,空气密度以及年平均风速等相关风况气象参数。本文通过总体载荷计算,对影响风机疲劳载荷的主要工况进行载荷计算以及疲劳分析,给 出规律性的结论,为以后的风机设计,风机选型等相关问题提供理论基础以及经验总结。关键词:不同风况,疲劳载荷,动量-叶素理论风电场的开发是一个资金庞大,周期较长的项目,而整个风电场的主要设备是风力发电机组。所以,我们必须对风力发电机组的安全性和可靠性做一个科学规范的计算校核。需要对特殊地形造成的特殊风况进行疲劳载荷分析和总结,做成自己的数据库,对不同风电场进行载荷评估。 一、风机总体载荷计算理论基础 1.1、风机气动载荷 目前计算风力发电机的气动载荷有动量-叶素理论、CFD等方法。动量-叶素理论是将风轮叶片沿展向分成许多微段,称这些微段为叶素,在每个叶素上的流动相互之间没有干扰,叶素可以认为是二元翼型,在这些微段上运用动量理论求出作用在每个叶素上的力和力矩,然后沿叶片展向积分,进而求得作用在整个风轮上的力和力矩,算得旋翼的升力和功率。动量-叶素理论形式比较简单,计算量小,便于工程应用,估算机组初始设计时整机的气动性能,被广泛用于风力机的设计和性能计算,而且还用来确定风力机的动态载荷,不断地被进一步改进和完善。为此在计算中应用动量-叶素理论方法来计算风机的气动载荷。 1.2、动量理论 动量理论是经典的风力机空气动力学理论。风轮的作用是将风的动能转换成机械能,分不考虑风轮后尾流旋转和考虑风轮后尾流旋转两种情况应用动量理论。 1.3、叶素理论 叶素理论的基本出发点是将风轮叶片沿展向分成许多微段,称这些微段为叶素,在每个叶素上的流动相互之间没有干扰,叶素可以认为是二元翼型,将作用在每个叶素上的力和力矩沿展向积分,求得作用在风轮上的力和力矩。 1.4、动量─叶素理论 为了计算风力机性能,必须计算风轮旋转面中的轴向诱导因子和周向诱导因子,这就需要用到动量─叶素理论。由动量理论和叶素理论通过迭代方法可以求出轴向诱导因子和周向诱导因子。 1.5、雨流技术基本计数规则 1)雨流依次从载荷时间历程的峰值位置的内侧沿着斜坡往下流;(2)雨流从某一个峰值点开始流动,当遇到比其起始峰值更大的峰值时要停止流动;(3)雨流遇到上面流下的雨流时,必须停止流动;(4)取出所有的全循环,记下每个循环的幅度;(5)将第一阶段计数后剩下的发散收敛载荷时间历程等效为一个收敛发散型的载荷时间历程,进行第二阶段的雨流计数。计数循环的总数等于两个计数阶段的计数循环之和。 二、疲劳载荷评估 风机的疲劳载荷主要是由于外部风电场的气象风况条件决定的,主要由湍流强度,风场的空气密度,以及风电场的年平均风速决定的。我们通过叶素动量理论进行工程分析以及和模拟软件相结合,对疲劳工况进行分析。我们模拟所使用的模拟软件为GH Bladed软件,主要是用于水平轴风机载荷计算以及风机性能分析。主要包括风机的初步设计,风机的详细设计以及零部件设计,风机型式认证。在风机输入参数中,有风机的气动和结构参数,传动链和电气系统,传感器系统和制动系统,控制和安全系统等;外部条件输入包括风况输入,波浪和洋流,地震,风机故障,电气和电网扰动等;风机的稳态特性,主要包括气动信息,系数性能,稳态功率曲线,稳态运行载荷以及稳态停机载荷等;动态模拟风机的特性,包括正常运行,启动,紧急停机,正常停机,空转,静止等。 GH Bladed软件的主要通过水平轴空气动力学动量理论,叶素理论,叶素-动量理论等基本理论,结合风机的气动特性,以及叶尖轮毂损失,塔影模型,动态失速,尾流等修正,迭代计算出风轮的轴向和周向的入流因子,从而计算出风机的各位置载荷。通过测试,GH Bladed软件计算结果和在风电场实际运行的数据相当吻合。选用某公司117-2000-85型的风机为研究对象,风机模型不变,控制系统不更改的情况下,分别从风电场不同的湍流强度,不同的空气密度以及不同的年平均风速的情况下,分别对风机关键截面的等效疲劳载荷进行对比分析,试图找到规律,为以后设计风机以及风机的快速选型打好良好的理论基础. 2.1不同湍流强度下疲劳载荷分析 选用某公司117-2000-85型的风机,空气密度为标准的空气密度1.225kg/m3,年平均风为6.5m/s,湍流强度选取位0.1,0.14,,0.18的情况进行载荷计算以及雨流技术统计,选取叶根处载荷(m=10)以及塔筒底部载荷(m=4)进行比较。计算结果详见下图表:表2.1 叶根不同湍流强度的疲劳载荷以及对比
学号14113502505 毕业设计 题目:直驱式风力发电机组变桨距系统设计 作者李炳男届别2015届 系别机械工程学院专业机械电子工程指导教师郭洪澈职称副教授 完成时间 2015年5月17日 摘要
现在,市场上应用最好的就是采用独立变桨距控制的发电机组,它最主要的特点就是能够用风力机叶片轴心处的风俗对各个叶片进行同步控制。但是由于风力发电机的容量在增长中,所以风力机的叶片也会越来越长,因此风力机上的叶片载荷会越来越大,而实际上,由于与地面之间会存在摩擦,而且风速也会随着高度的变化而变化,风力机风轮扫略的风速随着高度的变化而变化,这些个问题都会影响到风力机的使用寿命。 本文将会使风力机的独立变桨距控制部分分成两个部分:一部分是集中变桨距控制的部分;第二部分是修正变桨距控制部分。本文采用非线性PID控制来对集中变桨距控制器进行设计,以使的风力发电机组的输出功率始终维持在一定的范围内;再通过采用状态反馈控制以及极点配置的方法来设计修正变桨距控制器,来减小风力机叶片上的载荷。然后,通过把各个叶片上的集中变桨距角和修正变桨距角之和来作为叶片的独立变桨距角输入风力机,这样便可以对风力机进行控制。我们在阶跃的风速和随机的风速下对风力发电机进行数字仿真的研究,结果表明独立变桨距控制能够减少风力机叶片上的载荷,从而有助于增加风力机的使用寿命,而且具有非常好的动态性能和静态误差。 状态反馈在风力机发电机的节点位置具有非常好的调节作用,但是如果对系统的动态特性需要非常高的要求时,基于状态反馈的独立变桨距控制系统的设计就难以达到要求。 关键词:变桨距;节距角;发电机
Abstract At present ,variable pitch control with turbine is widespread in the market. This wind turbine uses the wind speed on the axis of the blade as the reference wind speed of wind blade synchronous control. In fact , because of the existing of ground friction,the wind speed if changing with the height and the wind speed in the surface of revolution of the wind blades. With the increasing of the wind turbine capacity,the difference of the blade wind speed with different spin high degree is gradually increasing,making the loads of the blades tend to gradually increase,this problem has seriously affected the wind turbine life. The state feedback control has a good regulating effect in the vicinity of a wind turbine stable point,but if the system is required relatively high of dynamic performance, it is difficult for the independent variable pitch control based on the feedback to achieve the design intention. The amended pitch plus the collective pitch is the independent pitch. Through the simulation of the wind turbine under the step and the random wind ,it follows that the independent variable pitch control of wind power generation system can reduce the loads of blade and extend service life of wind turbine, on condition that the output power is kept stable . Keywords: Variable pitch ;Pitch Angle; generator
风力机载荷 风力机载荷情况 风力机载荷是风力机设计和风力机认证时的重要依据,用于对风力机进行静强度和疲劳强度分析。目前,国际上有很多规范、标准对风力机载荷做了详细的规定。其中应用最广的是IEC61400-1标准。 1.载荷分类 作用在风力机上的载荷主要包括: (1)空气动力载荷; (2)重力载荷; (3)惯性载荷,包括离心力和科氏力等; (4)操纵载荷; (5)其他载荷,如结冰载荷 根据载荷的性质,在风力机上的载荷可分为静载荷、定常载荷、周期载荷、瞬态载荷、脉冲载荷、随机载荷和谐振载荷等。 2.载荷情况 由不同的外部条件与风力机工作状态组合而成,主要包括:①正常外部条件与风力机正常工作状态组合;②正常外部条件与风力机故障工作状态组合;③极端外部条件与风力机正常工作状态组合。 根据IEC61400-1标准的规定,载荷情况如表5-1所列。
表5—1载荷情况
3.安全系数 风力机设计时,需要提供的是设计载荷F d ,它和实际载荷F r 的关系是:d f r F r F =, 式中r f ——载荷局部安全系数 见表5-2所示: 表5—2 载荷局部安全系数 风力载荷计算 风力机载荷特性 1.叶片上的载荷 (1)空气动力载荷 作用在叶片上的包括摆振方向的剪力Q yb 和弯矩M xb 、挥舞方向的剪力Q xb 和弯矩M yb 以及变桨距时,与变桨距力矩平衡的叶片俯仰力矩M zb 。叶片上的空气动力载荷可根据2.2节中的动量——叶素理论计算,计算时先求出轴向诱导因子a 和周向诱导因子b ,再求得叶素上的气流速度三角形以及作用在叶素上的法向力dF n 和切向力dF t (前图 2—1),然后通过积分求出作用在叶片上的空气动力载荷Q xb ,Q yb ,M xb 和M yb 。 图2-1叶素上的气流速度三角形和空气动力分量 0R 2xb 0n r 1Q V cC dr 2ρ=ò 0R 2yb 0t r 1Q V cC dr 2ρ=ò R 2yb 0n r 1M V cC rdr 2ρ=ò
附件 XX公司 风电机组运行优化指导意见 (试行) 安全生产部 二○一三年四月
目录 1 总则 (1) 2.气象信息 (2) 2.1基本要求 (2) 2.2信息收集 (2) 3.风机运行优化 (2) 3.1基本要求 (2) 3.2风机运行优化 (3) 4.电气设备运行优化 (6) 4.1基本要求 (6) 4.2电气设备运行优化 (6) 5.设备管理优化 (8) 5.1基本要求 (8) 5.2设备交接、验收优化 (7) 5.3设备特殊巡检优化 (8) 5.4检修维护策略优化 (8) 5.5备品备件优化 (10) 6.负荷调度优化 (11) 6.1基本要求 (11) 6.2限电负荷调度优化 (10) 6.3限电环境优化 (12) 7.技术改造管理优化 (12) 7.1基本要求 (11) 7.2技术改造管理优化 (12) 8.管控模式优化 (12) 8.1基本要求 (12) 8.2管控模式优化 (13)
前言 为深入贯彻落实XX公司“优化运行、确保安全、降本增效”专项活动部署,充分发挥设备能力,深入挖掘设备潜力,全面优化机组运行方式,降低运行消耗,提高风电机组运行的经济性水平,制定本指导意见。 本指导意见明确了风电机组运行优化的范围、内容、基本要求、方法以及需要注意的事项等,为运行优化工作提供指导。 本指导意见由XX公司安全生产部组织起草。
1 总则 1.1 运行优化必须坚持“保人身、保系统、保设备”的原则,以“抢电量、提效率、降损耗、降成本”为目标,以改革创新的精神、流程再造的力度,在全面深入开展对标的基础上,通过开展性能试验、综合分析、管理提升,建立一整套科学、合理的运行调整方法和控制程序,使风力发电机组、风电场在最安全、最经济的方式下运行。 1.2 运行优化应以风电场利用小时、风电场弃风限电比、风机可利用率、风机功率特性一致性系数为核心指标,限电地区增加“完整利用小时”(即利用小时+限电影响利用小时)指标,以机组设计值和区域先进值为标杆,对每个风电场、每台风机开展对标分析,全面分析查找影响机组提效降耗的问题;通过加强操作调整、设备治理和改造,实现机组运行指标达到或优于设计值的目标。 1.3 运行优化的主要内容包括:气象信息、风机运行、电气运行、设备管理、负荷调度、技术改造、管控模式等。风电企业应结合设备、系统运行状况和运行人员积累的宝贵经验,不断完善优化方案,有针对性地开展运行优化工作,杜绝生搬硬套。 1.4 运行优化要以风电核心指标为依据,以绩效考核为保障,指标竞赛为载体,强化全员价值思维和效益理念,充分调动全体员工的积极性、主动性和创造性,立足岗位,为实现管理、效益双提升做出新贡献。