单片机原理及应用
第十讲 MSP430单片机的ADC
实验报告
报告人:学号:同组人员:
实验内容
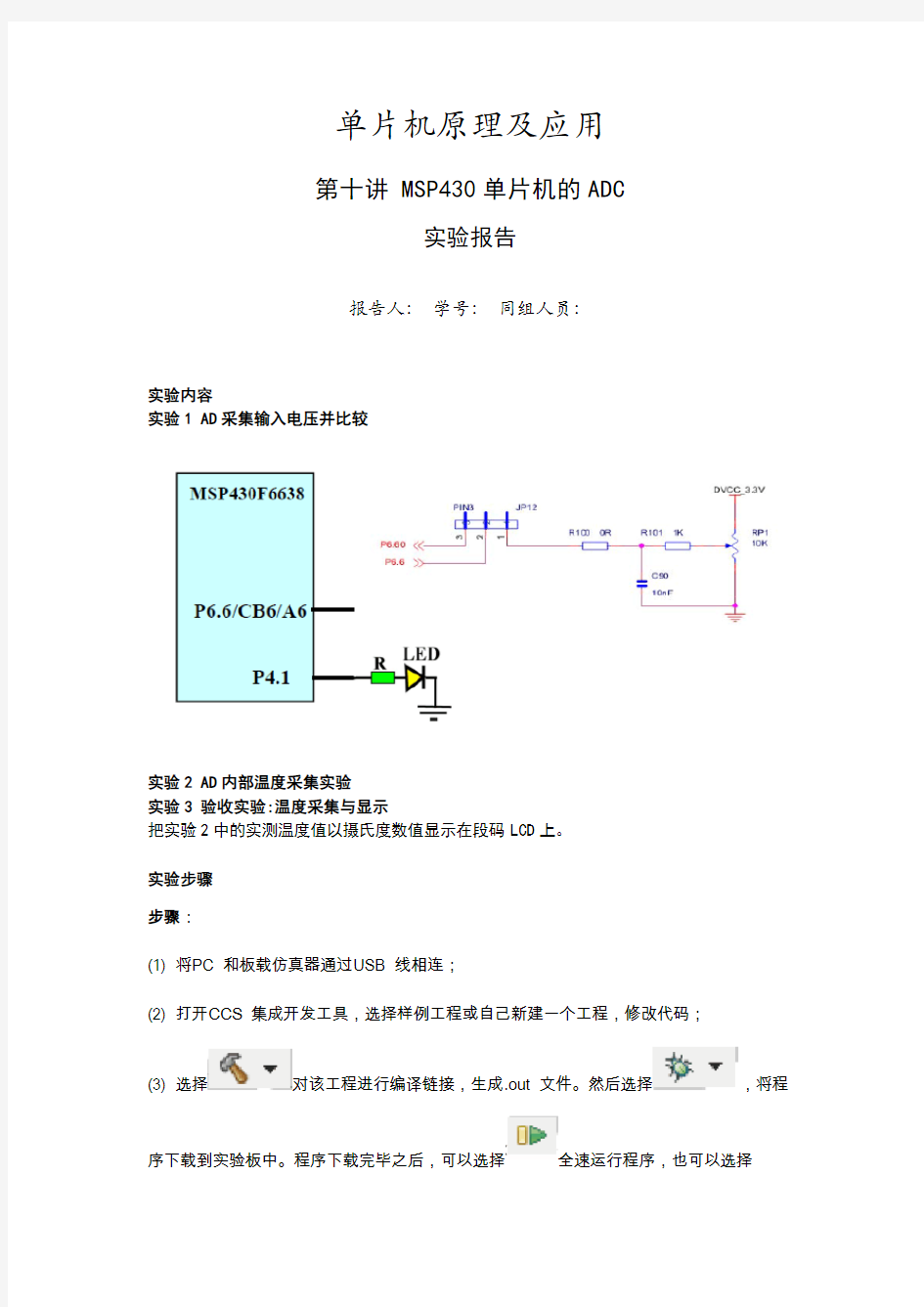
实验1 AD采集输入电压并比较
实验2 AD内部温度采集实验
实验3 验收实验:温度采集与显示
把实验2中的实测温度值以摄氏度数值显示在段码LCD上。
实验步骤
步骤:
(1) 将PC 和板载仿真器通过USB 线相连;
(2) 打开CCS 集成开发工具,选择样例工程或自己新建一个工程,修改代码;
(3) 选择对该工程进行编译链接,生成.out 文件。然后选择,将程序下载到实验板中。程序下载完毕之后,可以选择全速运行程序,也可以选择
单步调试程序,选择F3 查看具体函数。也可以程序下载之后,按下,软件界面恢复到原编辑程序的画面。再按下实验板的复位键,运
行程序。(调试方式下的全速运行和直接上电运行程序在时序有少许差别,建议
上电运行程序)。
关键代码:
实验1 AD采集输入电压并比较
#include
int main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
ADC12CTL0 = ADC12SHT02 + ADC12ON; // Sampling time, ADC12 on
ADC12CTL1 = ADC12SHP; // Use sampling timer
ADC12IE = 0x01; // Enable interrupt
ADC12CTL0 |= ADC12ENC;
P6SEL |= 0x01; // P6.0 ADC option select
P4DIR |= BIT1; // P4.1 output
while (1)
{
ADC12CTL0 |= ADC12SC; // Start sampling/conversion
__bis_SR_register(LPM0_bits + GIE); // LPM0, ADC12_ISR will force exit __no_operation(); // For debugger
}
}
#pragma vector = ADC12_VECTOR
__interrupt void ADC12_ISR(void)
{
switch(__even_in_range(ADC12IV,34))
{
case 0: break; // Vector 0: No interrupt
case 2: break; // Vector 2: ADC overflow
case 4: break; // Vector 4: ADC timing overflow
case 6: // Vector 6: ADC12IFG0
if (ADC12MEM0 >= 0x7ff) // ADC12MEM = A0 > 0.5AVcc?
P4OUT |= BIT1; // P4.1 = 1
else
P4OUT &= ~BIT1; // P4.1 = 0
__bic_SR_register_on_exit(LPM0_bits); // Exit active CPU
case 8: break; // Vector 8: ADC12IFG1
case 10: break; // Vector 10: ADC12IFG2
case 12: break; // Vector 12: ADC12IFG3
case 14: break; // Vector 14: ADC12IFG4
case 16: break; // Vector 16: ADC12IFG5
case 18: break; // Vector 18: ADC12IFG6
case 20: break; // Vector 20: ADC12IFG7
case 22: break; // Vector 22: ADC12IFG8
case 24: break; // Vector 24: ADC12IFG9
case 26: break; // Vector 26: ADC12IFG10
case 28: break; // Vector 28: ADC12IFG11
case 30: break; // Vector 30: ADC12IFG12
case 32: break; // Vector 32: ADC12IFG13
case 34: break; // Vector 34: ADC12IFG14
default: break;
}
}
实验2 AD内部温度采集实验
#include
#define CALADC12_15V_30C *((unsigned int *)0x1A1A) // Temperature Sensor Calibration-30 C
//See device datasheet for TLV table memory mapping
#define CALADC12_15V_85C *((unsigned int *)0x1A1C) // Temperature Sensor Calibration-85 C
unsigned int temp;
volatile float temperatureDegC;
volatile float temperatureDegF;
int main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
REFCTL0 &= ~REFMSTR; // Reset REFMSTR to hand over control to
// ADC12_A ref control registers
ADC12CTL0 = ADC12SHT0_8 + ADC12REFON + ADC12ON;
// Internal ref = 1.5V
ADC12CTL1 = ADC12SHP; // enable sample timer
ADC12MCTL0 = ADC12SREF_1 + ADC12INCH_10; // ADC i/p ch A10 = temp sense i/p ADC12IE = 0x001; // ADC_IFG upon conv result-ADCMEMO __delay_cycles(100); // Allow ~100us (at default UCS settings)
// for REF to settle
ADC12CTL0 |= ADC12ENC;
while(1)
{
ADC12CTL0 &= ~ADC12SC;
ADC12CTL0 |= ADC12SC; // Sampling and conversion start
__bis_SR_register(LPM4_bits + GIE); // LPM0 with interrupts enabled
__no_operation();
// Temperature in Celsius. See the Device Descriptor Table section in the // System Resets, Interrupts, and Operating Modes, System Control Module // chapter in the device user's guide for background information on the // used formula.
temperatureDegC = (float)(((long)temp - CALADC12_15V_30C) * (85 - 30)) / (CALADC12_15V_85C - CALADC12_15V_30C) + 30.0f;
// Temperature in Fahrenheit Tf = (9/5)*Tc + 32
temperatureDegF = temperatureDegC * 9.0f / 5.0f + 32.0f;
__no_operation(); // SET BREAKPOINT HERE
}
}
#pragma vector=ADC12_VECTOR
__interrupt void ADC12ISR (void)
{
switch(__even_in_range(ADC12IV,34))
{
case 0: break; // Vector 0: No interrupt
case 2: break; // Vector 2: ADC overflow
case 4: break; // Vector 4: ADC timing overflow case 6: // Vector 6: ADC12IFG0
temp = ADC12MEM0; // Move results, IFG is cleared
__bic_SR_register_on_exit(LPM4_bits); // Exit active CPU
case 8: break; // Vector 8: ADC12IFG1
case 10: break; // Vector 10: ADC12IFG2
case 12: break; // Vector 12: ADC12IFG3
case 14: break; // Vector 14: ADC12IFG4
case 16: break; // Vector 16: ADC12IFG5
case 18: break; // Vector 18: ADC12IFG6
case 20: break; // Vector 20: ADC12IFG7
case 22: break; // Vector 22: ADC12IFG8
case 24: break; // Vector 24: ADC12IFG9
case 26: break; // Vector 26: ADC12IFG10
case 28: break; // Vector 28: ADC12IFG11
case 30: break; // Vector 30: ADC12IFG12
case 32: break; // Vector 32: ADC12IFG13
case 34: break; // Vector 34: ADC12IFG14
default: break;
}
}
实验3 验收实验:温度采集与显示
int main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
Init_TS3A5017DR(); // Configure TS3A5017DR IN1 and IN2
Init_lcd(); // LCD初始化
Backlight_Enable(); // 打开背光
LcdGo(1); // 打开液晶模块
LCD_Clear(); // 清屏
REFCTL0 &= ~REFMSTR; // Reset REFMSTR to hand over control to
// ADC12_A ref control registers
ADC12CTL0 = ADC12SHT0_8 + ADC12REFON + ADC12ON;
// Internal ref = 1.5V
ADC12CTL1 = ADC12SHP; // enable sample timer
ADC12MCTL0 = ADC12SREF_1 + ADC12INCH_10; // ADC i/p ch A10 = temp sense i/p ADC12IE = 0x001; // ADC_IFG upon conv result-ADCMEMO __delay_cycles(100); // Allow ~100us (at default UCS settings)
// for REF to settle
ADC12CTL0 |= ADC12ENC;
while(1)
{
ADC12CTL0 &= ~ADC12SC;
ADC12CTL0 |= ADC12SC; // Sampling and conversion start
__bis_SR_register(LPM4_bits + GIE); // LPM0 with interrupts enabled
__no_operation();
// Temperature in Celsius. See the Device Descriptor Table section in the // System Resets, Interrupts, and Operating Modes, System Control Module // chapter in the device user's guide for background information on the // used formula.
temperatureDegC = (float)(((long)temp - CALADC12_15V_30C) * (85 - 30)) / (CALADC12_15V_85C - CALADC12_15V_30C) + 30.0f;
i = (int)temperatureDegC/100;
j = (int)(temperatureDegC-i*100)/10;
k = (int)(temperatureDegC-i*100-j*10);
LCDMEM[0] = char_gen[i];
LCDMEM[1] = char_gen[j];
LCDMEM[2] = char_gen[k];
__delay_cycles(1000000); // Allow ~100us (at default UCS settings)
// Temperature in Fahrenheit Tf = (9/5)*Tc + 32
temperatureDegF = temperatureDegC * 9.0f / 5.0f + 32.0f;
__no_operation(); // SET BREAKPOINT HERE
}
}
实验现象分析:
实验1 AD采集输入电压并比较
旋转电位器RP1,改变AD6输入端的电压:
当输入电压大于VCC/2时,P4.1的LED亮;
当输入电压小于VCC/2时,P4.1的LED灭。
实验2 AD内部温度采集实验
烧入程序设置断点以后,通过变量观察栏,看到temperatureDegC的值每运行一次,改变一次值,值的范围波动较大,第一次为24左右,后面的情况数值范围为70-170.
实验3 验收实验:温度采集与显示
LCD液晶屏上显示温度值为140左右,每隔一段时间变化一次,变动范围在65-170之间。思考题
1、简述ADC模块的常用性能指标。
答:
分辨率R :可以转换成数字量的模拟电压量的最小值;
转换精度:表示模拟电压实际值与其对应数字量的相对误差,可以表达为“真实度”;
转换时间:
指ADC模块完成一次模拟数字转换所需要的时间,转换
时间越短越能适应输入信号的变化。转换时间与ADC模
块的结构和位数有关。
2、MSP430 ADC12有几种内部参考源?应如
何选择?
答:
软件可选择的片上参考电压生成器(MSP430F54xx:1.5 V或2.5 V,其他设备:1.5 V,2.0 V,2.5 V)
电压参考源选择位ADC12SREFx
000 VR+ = AVCC , VR- = AVSS
001 VR+ = VREF+ , VR- = AVSS
010 VR+ = VeREF+ , VR- = AVSS
011 VR+ = VeREF+ , VR- = AVSS
100 VR+ = AVCC , VR- = VREF-/ VeREF-
101 VR+ = VREF+ , VR- = VREF-/ VeREF-
110 VR+ = VeREF+ , VR- = VREF-/ VeREF-
111 VR+ = VeREF+ , VR- = VREF-/ VeREF
3、MSP430 ADC12 转换内核为什么需要有采
样保持电路?
答:
模拟信号经采样后,得到一系列样值脉冲。采样脉冲宽度τ一般是很短暂的,在下一个采样脉冲到来之前,应暂时保持所取得的样值脉冲幅度,以便进行转换。因此,在取样电路之后须加保持电路。
4、MSP430 ADC12 有哪些转换方式,各自特
点是什么?
答:
逐次逼近型(SAR):
优点:
高速,采样速率可达1MSPS;
与其它ADC相比,功耗相当低;
在分辨率低于12位时,价格较低。
缺点:
在高于14位分辨率情况下,价格较高;
传感器产生的信号在进行模/数转换之前需要进行调理,包括增益级和滤波,这样会明显增加成本。
并行比较型:
优点:
模/数转换速度最高;
缺点:
分辨率不高,功耗大,成本高。
随着分辨率的提高,需要高密度的模拟设计以实现转换所必需的数量很大的精密分压电阻和比较器电路。输出数字增加一位,精密电阻数量就要增加一倍,比较器也近似增加一倍。
积分型ADC:
优点:
分辨率高,可达22位;
功耗低、成本低。
缺点:
转换速率低,转换速率在12位时为100~300SPS。
5、MSP430 数模转换模块是如何支持低功耗
特性的?
答:
ADC12_A内部参考发生器是为低功耗应用设计的。参考电压发生器包括一个带隙电压源和一个单独的缓存器(电流消耗和建立时间分别在设备数据表中说明。当ADC12REFON=1时两者同时启用;当ADC12REFON=0时两者都被禁用。当ADC12REFON=1和REFBURST=1,且没有任何转换被激活时,则缓存器自动禁用,并在需要时自动重新启用。当缓存器被禁用时不消耗电流,此时带隙电压源保持使能。内部参考电压缓存器还具有可选的速度与功率设置,当最大转换速率低于50kps时,设置ADC12SR=1能降低约50%的缓存器电流消耗。
实验中遇到的问题
关于实验三中温度值显示错误的问题,怀疑是板子的问题,因为换一块板子烧了程序之后温度值显示正常,大概在23左右。
MSP430单片机课程设计 一.设计要求 数字温度计 (1)用数码管(或LCD)显示温度和提示信息; (2)通过内部温度传感器芯片测量环境温度; (3)有手动测量(按测量键单次测量)和自动测量(实时测量)两种工作模式; (4)通过按键设置工作模式和自动测量的采样时间(1秒~1小时); (5)具备温度报警功能,温度过高或过低报警。 二.系统组成 系统由G2Launch Pad及其拓展板构成,单片机为MSP430G2553。 I2的通信方式对IO进行拓展,芯片为TCA6416A; 使用C 使用HT1621控制LCD; 三.系统流程 拓展的四个按键key1、key2、key3、key4分别对应单次测量、定时测量、定时时间的增、减。定时时间分别为1s,5s,15s,30s,60s。在自动测量模式下,当温度超过设定温度上限
即报警,报警时在LCD屏幕显示ERROR同时LED2闪烁,在5s后显示0℃。此时可重新开始手动或自动测量温度。 系统示意图: 四.演示 a)手动测量温度 b)自动测量温度 c)报警
显示ERROR同时LED闪烁d)设置时间界面 五.代码部分 #include "MSP430G2553.h" #include "TCA6416A.h" #include "LCD_128.h" #include "HT1621.h" #include "DAC8411.h" #define CPU_F ((double)8000000) #define delay_us(x) __delay_cycles((long)(CPU_F*(double)x/1000000.0)) #define delay_ms(x) __delay_cycles((long)(CPU_F*(double)x/1000.0)) static int t=0; long temp; long IntDeg; void ADC10_ISR(void); void ADC10_init(void); void LCD_Init(); void LCD_Display(); void GPIO_init(); void I2C_IODect(); void Error_Display(); void WDT_Ontime(void); void LCD_Init_AUTO(); void LCD1S_Display();
章5 80C51的中断系统及定时/计数器 1.80C51有几个中断源?各中断标志是如何产生的?又是如何复位的?CPU响应各中断时,其中断入口地址是多少? 答:5个中断源,分别为外中断INT0和INT1、T0和T1溢出中断、串口中断。 电平方式触发的外中断标志与引脚信号一致;边沿方式触发的外中断响应中断后由硬件自动复位。 T0和T1,CPU响应中断时,由硬件自动复位。 RI和TI,由硬件置位。必须由软件复位。 另外,所有能产生中断的标志位均可由软件置位或复位。 各中断入口地址:INT0―0003H,T0—000BH,INT1—0013H,T1—001BH,RI和TI—0023H。 2.某系统有三个外部中断源1、2、3,当某一中断源变低电平时便要求CPU处理,它们的优先处理次序由高到低为3、2、1,处理程序的入口地址分别为2000H、2100H、2200H。试编写主程序及中断服务程序(转至相应的入口即可)。 答:将3个中断信号经电阻线或,接INT1。 ORG 0000H LJMP MAIN ORG 00013H LJMP ZDFZ ORG 0040H MAIN:SETB EA SETB EX1 SJMP $ 0RG 0200H ZDFZ:PUSH PSW PUSH ACC JB P1.0,DV0 JB P1.1,DV1 JB P1.2,DV2 INRET:POP ACC POP PSW RETI ORG 2000H DV0:------------ JMP INRET ORG 2100H
DV1:------------ JMP INRET ORG 2200H DV2:------------ JMP INRET 3.外部中断源有电平触发和边沿触发两种触发方式,这两种触发方式所产生的中断过程有何不同?怎样设定? 答: 当IT0=0时,INT0为电平触发方式。电平触发方式时,CPU在每个机器周期的S5P2采样INT0引脚电平,当采样到低电平时,置IE0=1向CPU请求中断;采样到高电平时,将IE0清0。在电平触发方式下,CPU响应中断时,不能自动清除IE0标志。 电平触发方式时,外部中断源的有效低电平必须保持到请求获得响应时为止,不然就会漏掉;在中断服务结束之前,中断源的有效的低电平必须撤除,否则中断返回之后将再次产生中断。该方式适合于外部中断输入为低电平,且在中断服务程序中能清除外部中断请求源的情况。 当IT0=1时,INT0为边沿触发方式。边沿触发方式时,CPU在每个机器周期的S5P2采样INT0引脚电平,如果在连续的两个机器周期检测到INT0引脚由高电平变为低电平,即第一个周期采样到INT0=1,第二个周期采样到INT0=0,则置IE0=1,产生中断请求。在边沿触发方式下,CPU响应中断时,能由硬件自动清除IE0标志。 边沿触发方式时,在相继两次采样中,先采样到外部中断输入为高电平,下一个周期采样到为低电平,则在IE0或IE1中将锁存一个逻辑1。若CPU暂时不能响应,中断申请标志也不会丢失,直到CPU响应此中断时才清0。另外,为了保证下降沿能够被可靠地采样到,INT0和INT1引脚上的负脉冲宽度至少要保持一个机器周期(若晶振频率为12MHz,为1微秒)。边沿触发方式适合于以负脉冲形式输入的外部中断请求。 4.定时/计数器工作于定时和计数方式时有何异同点? 答: 定时/计数器实质是加1计数器。 不同点:设置为定时器模式时,加1计数器是对内部机器周期计数(1个机器周期等于12个振荡周期,即计数频率为晶振频率的1/12)。计数值乘以机器周期就是定时时间。设置为计数器模式时,外部事件计数脉冲由T0或T1引脚输入到计数器。在每个机器周期的S5P2期间采样T0、T1引脚电平。当某周期采样到一高电平输入,而下一周期又采样到一低电平时,则计数器加1,更新的计数值在下一个机器周期的S3P1期间装入计数器。 相同点:它们的工作原理相同,它们都有4种工作方式,由TMOD中的M1M0设定,即 方式0:13位计数器; 方式1:16位计数器; 方式2:具有自动重装初值功能的8位计数器; 方式3:T0分为两个独立的8位计数器,T1停止工作。 5.定时/计数器的4种工作方式各有何特点?
1>指令:CPU 根据人的意图来执行某种操作的命令 指令系统:一台计算机所能执行的全部指令集合 机器语言:用二进制编码表示,计算机能直接识别和执行的语言 汇编语言:用助记符、符号和数字来表示指令的程序语言 高级语言:独立于机器的,在编程时不需要对机器结构及其指令系统有深入 了解的通用性语言 2、 见第1题 3、 操作码[目的操作数][,源操作数] 4、 寻址方式 寻址牢间 立即数寻址 程序存储器ROM 直接寻址 片内RAM 低128B 、特殊功能寄存器 寄存器寻址 工作寄存器R0 R7、A 、B 、C 、DPTR 寄存器间接寻址 片内RAM 低128B 、片外RAM 变址寻址 程序存储器(@A+PC,@A+DPTR ) 相对寻址 程序存储器256B 范围(PC+偏移量) 位寻址 片内RAM 的20H-2FH 字节地址、部分SFR 5、SFR :直接寻址,位寻址,寄存器寻址;片外RAM :寄存器间接寻址 A, 40H ;直接寻址 (40H ) A RO, A ;寄存器寻址 (A ) - RO Pl, #0F0H ;立即数寻址 0F0—P1 A, @R0 ;寄存器间接寻址((RO )) - A P2, Pl ;直接寻址(Pl ) ->P2 最后结果:(RO) =38H, (A) =40H, (PO) =38H, (Pl) = (P2) =0F0H, (DPTR) =3848H, (18H) =30H, OOH) =38H, (38H) =40H, (40H) =40H, (48H) =38H 注意:?左边是内容,右边是单元 7、 用直接寻址,位寻址,寄存器寻址 8、 MOV A,DATA ;直接寻址2字节1周期 MOV A,#DATA ;立即数寻址 2字节1周期 6、MOV MOV MOV MOV MOV MOV MOV MOV MOV @R0,30H ;直接寻址(3UH ) (RO ) DPTR,#3848 ;立即数寻址 3848—DPTR 40H,38H ;直接寻址(38H ) ->40H R0,30H ;直接寻址(30H ) ->R0 P0,R0 ;寄存器寻址 (RO ) PO 18H, #30H ;立即数寻址 30->18H MOV MOV
MSP430单片机应用技术 实验报告 学号:XXXXXXXX
实验1 一、实验题目:UCS实验 二、实验目的 设置DCO FLL reference =ACLK=LFXT1 = 32768Hz, MCLK = SMCLK = 8MHz,输出ACLK、SMCLK,用示波器观察并拍照。 UCS,MCLK、 SMCLK 8MHz 的 1 2 六、实验结果 实验2 一、实验题目:FLL+应用实验 二、实验目的
检测P1.4 输入,遇上升沿进端口中断,在中断服务程序内翻转P4.1 状态。 三、实验仪器和设备 计算机、开发板、示波器、信号源、电源、Code Comeposer Studio v5 四、实验步骤 1、用电缆连接开发板USB2口和电脑USB口,打开电源开关SW1,电源指示灯D5点亮; 2、运行CCSV5; WDT 1、用电缆连接开发板USB2口和电脑USB口,打开电源开关SW1,电源指示灯D5点亮; 2、运行CCSV5; 3、新建工作空间workspace; 4、新建工程project与源文件main.C; 5、编写程序; 6、编译、调试、下载程序到单片机;
7、观察、分析、保存运行结果。 五、实验程序 实验4 一、实验题目:WDT_A实验 二、实验目的 定时模式 1 2 六、实验结果 实验5一、实验题目:Timer_A实验
二、实验目的 比较模式-Timer_A0,两路PWM 输出,增减计数模式,时钟源SMCLK,输出模式7 TACLK = SMCLK = default DCOCLKDIV。PWM周期CCR0 = 512-1,P1.6 输出PWM占空比CCR1 = 37.5%,P1.7输出PWM占空比CCR1 =12.5%。 要求: (1)用示波器观察两路PWM 输出的波形并拍照,测量周期、正脉宽等参数,与理论值进行对比分析。 (2 (3 1 2 实验6 一、实验题目:ADC12实验 二、实验目的 ADC12 单次采样A0 端口,根据转换结果控制LED 状态。
院系:计算机科学学院专业:智能科学与技术年级: 2012 学号:2012213865 姓名:冉靖 指导教师:王文涛 2014年 6月1日
一. 以下是端口的各个寄存器的使用方式: 1.方向寄存器:PxDIR:Bit=1,输出模式;Bit=0,输入模式。 2.输入寄存器:PxIN,Bit=1,输入高电平;Bit=0,输入低电平。 3.输出寄存器:PxOUT,Bit=1,输出高电平;Bit=0,输出低电平。 4.上下拉电阻使能寄存器:PxREN,Bit=1,使能;Bit=0,禁用。 5.功能选择寄存器:PxSEL,Bit=0,选择为I/O端口;Bit=1,选择为外设功能。6.驱动强度寄存器:PxDS,Bit=0,低驱动强度;Bit=1,高驱动强度。 7.中断使能寄存器:PxIE,Bit=1,允许中断;Bit=0,禁止中断。 8.中断触发沿寄存器:PxIES,Bit=1,下降沿置位,Bit=0:上升沿置位。 9.中断标志寄存器:PxIFG,Bit=0:没有中断请求;Bit=1:有中断请求。 二.实验相关电路图: 1 MSP430F6638 P4 口功能框图: 主板上右下角S1~S5按键与MSP430F6638 P4.0~P4.4口连接: 2按键模块原理图: 我们需要设置两个相关的寄存器:P4OUT和P4DIR。其中P4DIR为方向寄存器,P4OUT 为数据输出寄存器。 主板上右下角LED1~LED5指示灯与MSP430F6638 P4.5~P4.7、P5.7、P8.0连接:
3 LED指示灯模块原理图: P4IN和P4OUT分别是输入数据和输出数据寄存器,PDIR为方向寄存器,P4REN 为使能寄存器: #define P4IN (PBIN_H) /* Port 4 Input */ #define P4OUT (PBOUT_H) /* Port 4 Output */ #define P4DIR(PBDIR_H) /* Port 4 Direction */ #define P4REN (PBREN_H) /* Port 4 Resistor Enable */ 三实验分析 1 编程思路: 关闭看门狗定时器后,对P4.0 的输出方式、输出模式和使能方式初始化,然后进行查询判断,最后对P4.0 的电平高低分别作处理来控制LED 灯。 程序流程图: 2 关键代码分析: #include
单片机原理及应用技术苏家建 课后习题参考答案 第三章MCS-51指令系统 3-1 MCS-51指令系统有哪几种寻址方式?按功能分类有哪几种指令? 3-2 设A=0FH,R0=30H,片内RAM的(30H)=0AH, (31H)=0BH, (32H)=0CH,下列程序段运行后的结果? MOV A,@R0 ;A=0AH MOV @R0,32H ;(30H)=0CH MOV 32H,A ;(32H)=0AH MOV R0,#31H ;R0=31H MOV A,@R0;A=(31H)=0BH 3-3 (1)R0的内容传送到R1 MOV A,R0 MOV R1,A (2)内部RAM 20H单元的内容传送到A MOV A,20H (3)外部RAM 30H单元的内容传送到R0 MOV R1,#30H MOVX A,@R1 MOV R0,A (4) 外部RAM 30H单元的内容传送到内部RAM 20H单元 MOV R1,#30H MOVX A,@R1 MOV 20H,A (5) 外部RAM 1000H单元的内容传送到内部RAM 20H单元 MOV DPTR,#1000H MOVX A,@DPTR MOV 20H,A (6)程序存储器ROM 2000H单元的内容传送到R1 MOV DPTR,#2000H CLR A MOVC A,@A+DPTR MOV R1,A (7) RAM 2000H单元的内容传送到内部RAM 20H单元 MOV DPTR,#2000H MOVX A,@DPTR MOV 20H,A (8) RAM 2000H单元的内容传送到外部RAM 30H单元 MOV DPTR,#2000H MOVX A,@DPTR MOV R0,#30H MOVX @R0,A (9) RAM 2000H单元的内容传送到外部RAM 1000H单元
MSP430单片机实验报告 专业: 姓名: 学号:
MSP430单片机实验报告 设计目标:使8位数码管显示“5201314.”,深入了解串行数据接口。 实现过程:主要分为主函数、驱动8位数码管函数、驱动1位数码管函数及延时函数。 延时函数:采用for循环。 驱动1位数码管子函数:设置74HC164的时钟传输和数传输,声明变量,使数据表中每一个要表示的字符的每一位都与shift做与运算从而进行传输,上升沿将传输数据传送出去。驱动1位数码管子函数的流程图如图1所示。 图1 驱动1位数码管子函数流程图 驱动8位数码管子函数:调用8次驱动1位数码管子函数。驱动8位数码管子函数流程图如图2所示。 图2 驱动8位数码管流程图
while 图3 主函数流程图 实验结果:供电后,数码管显示“5201314.”字样。 源程序: /************* 程序名称:5201314.*************/ /***程序功能:通过模拟同步串口控制8个共阳数码管***/ /*******P5.1 数据管脚,P5.3 同步时钟管脚*******/ #include
《单片机原理及接口技术》(第2版)人民邮电出版社 第5章I/O口应用-显示与开关/键盘输入 思考题及习题5 1.判断下列说法是否正确。 A.HD7279是用于键盘和LED数码管的专用接口芯片。答:对 B.LED数码管的字型码是固定不变的。答:错 C.为给扫描法工作的88非编码键盘提供接口电路,在接口电路中需要提供两个8位并行的输入口和一个8位并行的输出口。答:错 D.LED数码管工作于动态显示方式时,同一时间只有一个数码管被点亮。答:对 2.动态显示的数码管,任一时刻只有一个LED处于点亮状态,是LED的余辉与人眼的“视觉暂留”造成数码管同时显示的“假象”。答:对 3.为什么要消除按键的机械抖动?软件消除按键机械抖动的原理是什么? 答:消除按键的机械抖动,避免由于机械抖动造成的对键盘是否按下误判。软件消除按键机 械抖动的原理是采用软件延时,躲过键盘按键的机械抖动期。 4.LED的静态显示方式与动态显示方式有何区别?各有什么优缺点? 答:静态显示时,欲显示的数据是分开送到每一位LED上的。而动态显示则是数据是同时送到每一个LED上,再根据位选线来确定是哪一位LED被显示。静态显示亮度很高,但口线占用较多。动态显示口线占用较少,但是需要编程进行动态扫描,适合用在显示位数较多的场合。 5.分别写出表5-1中共阴极和共阳极LED数码管仅显示小数点“.”的段码。 答:80H(共阴极);7FH(共阳极)。 6.已知8段共阴极LED数码显示器要显示某字符的段码为7DH(a段为最低位),此时显示器显示 的字符为。 答:6 7.已知8段共阳极LED数码显示器要显示字符“6”(a段为最低位),此时的段码为。。 答:82H 8.当键盘的按键数目少于8个时,应采用式键盘。当键盘的按键数目为64个时,应采用式键盘。
第三章单片机的汇编语言与程序设计习题 1.设内部RAM中59H单元的内容为50H,写出当执行下列程序段后寄存器A,R0和内部RAM中50H,51H单元的内容为何值? MOV A,59H MOV R0,A MOV A,#00H MOV @R0,A MOV A,#25H MOV 51H,A MOV 52H,#70H 解:MOV A,59H ;A=50H MOV R0,A ;RO=50H MOV A,#00H ;A=00H MOV @R0,A ;50H=00H MOV A,#25H ;A=25H MOV 51H,A ;51H=25H MOV 52H,#70H ;52H=70H
所以:A=25H R0=50H ;50H=00H 51H=25H 2.请选用合适的指令对P0口内容做修改(例如使P0.0~P0.3不变,P0.4~P0.7为0)。 解:MOV A,P0 ANL A,0fh Mov P0,A 3.试问外部数据存储器和程序存储器可以用哪些指令来实现?举例说明。解:访问外部数据存储器指令有: MOVX @DPTR,A MOVX DPTR,#0100H MOV @DPTR,A MOVX A,@DPTR MOVX DPTR,#0200H MOV A,@DPTR MOVX A,@Ri MOVX A,@R0 MOVX @Ri,A MOVX @RI,A 访问程序存储器指令有: MOVX A,@A+PC
MOVX A,@A+DPTR 4.设堆栈指针SP中的内容为60H,内部RAM中30H和31H单元的内容分别为24H和10H,执行下列程序段后,61H,62H,30H,31H,DPTR及SP中的内容将有何变化? PUSH 30H PUSH 31H POP DPL POP DPH MOV 30H,#00H MOV 31H,#0FFH 解:PUSH 30H ;61H=24H PUSH 31H ;62=10H SP=62H POP DPL ;DPL=10H POP DPH ;DPH=24H SP=60H MOV 30H,#00H ;30H=00H MOV 31H,#0FFH ;31H=0FFH
A/D转换实验 一、转换原理 MSP430F149的A/D转换器原理请参考相关书籍。 实验板上与AD相关的硬件电路: 编程工作实际就是对以下寄存器的操作: 寄存器类型寄存器缩写寄存器的含义 转换控制寄存器ADC12CTL0转换控制寄存器0 ADC12CTL1转换控制寄存器1 中断控制寄存器ADC12IFG中断标志寄存器ADC12IE中断使能寄存器ADC12IV中断向量寄存器 存储及其 控制寄存器ADC12MCTL0 ~ ADC12MCTL15存储控制寄存器0~15 ADC12MEM0 ~ ADC12MEM15 存储寄存器0~15
设计主程序和中断服务程序。 二、转换程序 1、程序1:转换结果发送到PC 主程序中进行A/D初始化,中断服务程序读A/D转换结果,主程序中通过串口发送结果。 “”主程序与中断程序: /********************************************************* 程序功能:将ADC对端口电压的转换结果按转换数据和对应的 模拟电压的形式通过串口发送到PC机屏幕上显示 ----------------------------------------------------------- 通信格式: 9600 ----------------------------------------------------------- 测试说明:打开串口调试精灵,正确设置通信格式,观察接收数据 **********************************************************/ #include <> #include "" #include "" #include "" #define Num_of_Results 32 uint results[Num_of_Results]; //保存ADC转换结果的数组 uint average; uchar tcnt = 0; /***********************主函数***********************/ void main( void ) {
430单片机点亮LED实验报告 一.安装实验软件IAR 二.编写点亮LED灯程序 1.使P1.0口LED灯会不停的闪烁着,程序 #include
Delay_Ms(600);//稍作延时 } } 下载进去看到了P1.0口LED灯会不停的闪烁着。 2.实验目的让两盏灯交换闪烁程序 #include"msp430g2553.h" void main(void) { void Blink_LED(); WDTCTL=WDTPW+WDTHOLD; //关闭看门狗 P1DIR=BIT6; P2DIR=BIT0; while(1) { Blink_LED(); } } void Blink_LED() { _delay_cycles(1000000); //控制第二个LED P1OUT^=BIT6; _delay_cycles(1000000); //控制第一个LED P2OUT^=BIT0;
单片机原理及应用课后习题答案第5章作 业
第五章中断系统作业 1. 外部中断1所对应的中断入口地址为()H。 2. 对中断进行查询时,查询的中断标志位共有、_ _、、 _ 和_ 、_ _ 六个中断标志位。 3.在MCS-51中,需要外加电路实现中断撤除的是:() (A) 定时中断 (B) 脉冲方式的外部中断 (C) 外部串行中断 (D) 电平方式的外部中断 4.下列说法正确的是:() (A) 同一级别的中断请求按时间的先后顺序顺序响应。() (B) 同一时间同一级别的多中断请求,将形成阻塞,系统无法响应。() (C) 低优先级中断请求不能中断高优先级中断请求,但是高优先级中断请求 能中断低优先级中断请求。() (D) 同级中断不能嵌套。() 5.在一般情况下8051单片机允许同级中断嵌套。() 6.各中断源对应的中断服务程序的入口地址是否能任意设定? () 7.89C51单片机五个中断源中优先级是高的是外部中断0,优先级是低的是串行口中断。() 8.各中断源发出的中断申请信号,都会标记在MCS-51系统中的()中。 (A)TMOD (B)TCON/SCON (C)IE (D)IP 9. 要使MCS-51能够响应定时器T1中断、串行接口中断,它的中断允许寄存 器IE的内容应是() (A)98H (B)84H (C)42 (D)22H 10.编写出外部中断1为负跳沿触发的中断初始化程序。 11.什么是中断?其主要功能是什么? 12. 什么是中断源?MCS-51有哪些中断源?各有什么特点? 13. 什么是中断嵌套? 14.中断服务子程序与普通子程序有哪些相同和不同之处? 15. 中断请求撤除的有哪三种方式? 16. 特殊功能寄存器TCON有哪三大作用?
习题 1. 在MCS-51单片机中,寻址方式有几种? 答:寻址方式可分为数的寻址和指令寻址,数的寻址有:常数寻址(立即寻址)、寄存器数寻址(寄存器寻址)、存储器数寻址(直接寻址方式、寄存器间接寻址方式、变址寻址方式)和位寻址,指令的寻址有绝对寻址和相对寻址。 2. 在MCS-51单片机中,哪些寻址方式访问的是片内RAM? 答:访问片内RAM寻址有:寄存器寻址、直接寻址方式和寄存器间接寻址方式。 3. 在MCS-51单片机中,哪些寻址方式访问的是片外RAM? 答:只有寄存器间接寻址方式访问片外RAM寻址。 4. 在对片外RAM单元的寻址中,用Ri间接寻址与用DPTR间接寻址有什么区别? 答:片外数据存储器寻址中,用Ri间接寻址只能访问低端的256字节单元,而用DPTR 作指针间接访问可访问整个64K字节。 5. 在MCS-51单片机中,相对寻址方式的目的地址如何计算? 答:目的地址=当前PC+rel=转移指令的地址+转移指令的字节数+rel 6. 在位处理中,位地址的表示方式有哪几种? 答:位地址的表示方式有4种: (1) 直接位地址(00H~0FFH)。例如,20H。 (2) 字节地址带位号。例如,20H.3表示20H单元的3位。 (3) 特殊功能寄存器名带位号。例如,P0.1表示P0口的1位。 (4) 位符号地址。例如,TR0是定时/计数器T0的启动位。 7. 写出完成下列操作的指令。 (1) R2的内容送到R3中。 MOV A,R2 MOV R3,A (2) 片内RAM的30H单元内容送到片内RAM的40H单元中。 MOV 40H,30H (3) 片内RAM的30H单元内容送到片外RAM的30H单元中。 MOV A,30H MOV R0,#30H MOVX @R0,A (4) 片内RAM的20H单元内容送到片外RAM的2000H单元中。 MOV A,20H MOV DPTR,#2000H MOVX @DPTR,A (5) 片外RAM的1000H单元内容送到片内RAM的20H单元中。 MOV DPTR,#1000H MOVX A,@DPTR MOV 20H,A (6) 片外RAM的1000H单元内容送到片外RAM的4000H单元中。 MOV DPTR,#1000H MOVX A,@DPTR MOV DPTR,#4000H
GPIO实验教程 2015/7/24 官网地址:http://www.fengke.club
目录 第一节GPIO硬件介绍 (2) 第二节GPIO寄存器介绍 (3) 第三节实验 (5) 第四节实验现象 (7)
第一节GPIO硬件介绍 MSP430F5438A单片机属于5系列单片机,该系列的单片机最多可以提供12路数字IO接口,P1~P11以及PJ。大部分接口都有8个管脚,但是有些接口会少于8 个管脚。可以参考说明文档中关于接口的章节。每个I/O 管脚都可以独立的设置为输入或者输出方向,并且每个I/O 接线都可以被独立的读取或者写入。所有接口的寄存器都可以被独立的置位或者清零,就像设置驱动能力一样。 P1和P2接口具中断功能。从P1和P2接口的各个I/O管脚引入的中断可以独立的被使能并且设置为上升沿或者下降沿出发中断。所有的P1接口的I/O管脚的中断都来源于同一个中断向量P1IV,并且P2接口的中断都来源于另外一个中断向量P2IV。在一些MSP430x5xx单片机中,附加的接口也具有中断功能。详细说明请查阅芯片的说明文档。 每个独立的接口可以作为字节长度端口访问或者结合起来作为字长度端口进行访问。端口配对P1/P2、P3/P4、P5/P6、P7/P8 等联合起来分别叫做PA、PB、PC、PD 等。当进行字操作写入PA 口时,所有的16 为都被写入这个端口。利用字节操作写入PA 口的低字节时,高字节保持不变。相似地,使用字节指令写入PA 口高字节时,低字节保持不变。其它端口也是一样的,当写入的数据长度小于端口最大长度时,那些没有用到的位保持不变。所有的端口寄存器都利用这个规则来命名,除了中断向量寄存器P1IV 和P2IV。它们只能进行字节操作,并且PAIV 这个寄存器根本不存在。 利用字操作读取端口PA可以使所有16位数据传递到目的地。利用字节操作读取端口PA(P1或者P2)的高字节或者低字节并且将它们存储到存储器时可以只把高字节或者低字节分别传递到目的地。利用字节操作读取PA口数据并写入通用寄存器时整个字节都被写入寄存器中最不重要的字节。寄存器中其它重要的字节会自动清零。端口PB、PC、PD 和PE 都可以进行相同的操作。当读入的数据长短小于端口最大长度时,那些没有用到的位被视零,PJ 口也是一样的。 数字I/O的主要特征有: 1、可以独立编程的独立I/O口; 2、可以任意的混合输入输出; 3、独立配置P1、P2口的中断; 4、独立的输入和输出数据寄存器; 5、独立配置上拉或下拉电阻。
第五章中断系统作业 1. 外部中断1所对应的中断入口地址为()H。 2. 对中断进行查询时,查询的中断标志位共有、_ _、、 _ 和_ 、_ _ 六个中断标志位。 3.在MCS-51中,需要外加电路实现中断撤除的是:() (A) 定时中断 (B) 脉冲方式的外部中断 (C) 外部串行中断 (D) 电平方式的外部中断 4.下列说法正确的是:() (A) 同一级别的中断请求按时间的先后顺序顺序响应。() (B) 同一时间同一级别的多中断请求,将形成阻塞,系统无法响应。() (C) 低优先级中断请求不能中断高优先级中断请求,但是高优先级中断请求 能中断低优先级中断请求。() (D) 同级中断不能嵌套。() 5.在一般情况下8051单片机允许同级中断嵌套。() 6.各中断源对应的中断服务程序的入口地址是否能任意设定? () 7.89C51单片机五个中断源中优先级是高的是外部中断0,优先级是低的是串行口中断。() 8.各中断源发出的中断申请信号,都会标记在MCS-51系统中的()中。 (A)TMOD (B)TCON/SCON (C)IE (D)IP 9. 要使MCS-51能够响应定时器T1中断、串行接口中断,它的中断允许寄存器 IE的内容应是() (A)98H (B)84H (C)42 (D)22H 10.编写出外部中断1为负跳沿触发的中断初始化程序。 11.什么是中断?其主要功能是什么? 12. 什么是中断源?MCS-51有哪些中断源?各有什么特点? 13. 什么是中断嵌套? 14.中断服务子程序与普通子程序有哪些相同和不同之处? 15. 中断请求撤除的有哪三种方式? 16. 特殊功能寄存器TCON有哪三大作用? 17. 把教材的P82页的图改为中断实现,用负跳变方式,中断0(INT0)显示“L2”,中断1(INT1)显示“H3”。(可参考第四章的电子教案中的例子) 18.第5章课后作业第9题。 第五章中断系统作业答案 1. 外部中断1所对应的中断入口地址为(0013)H。 2. 对中断进行查询时,查询的中断标志位共有 IE0 、_TF0_、IE1 、 TF1_ 和_TI 、_RI_六个中断标志位。【实际上只能查询TF0、TF1、TI、RI】 3.在MCS-51中,需要外加电路实现中断撤除的是:(D) (A) 定时中断 (B) 脉冲方式的外部中断 (C) 外部串行中断 (D) 电平方式的外部中断 4.下列说法正确的是:(A C D ) (A) 同一级别的中断请求按时间的先后顺序顺序响应。(YES)
习题三 1.在MCS-51单片机中,寻址方式有几种?其中对片内RAM 可以用哪几种寻址方式?对片外RAM可以用哪几种寻址方式? 答:寻址方式可分为数的寻址和指令寻址,数的寻址有:常数寻址(立即寻址)、寄存器数寻址(寄存器寻址)、存储器数寻址(直接寻址方式、寄存器间接寻址方式、变址寻址方式)和位寻址,指令的寻址有绝对寻址和相对寻址。片内RAM寻址有:寄存器寻址、直接寻址方式和寄存器间接寻址方式。片外RAM寻址有:寄存器间接寻址方式。2.在对片外RAM单元寻址中,用Ri间接寻址与用DPTR 间接寻址有什么区别? 答:片外数据存储器寻址中,用Ri间接寻址只能访问低端的256字节单元,而用DPTR作指针间接访问可访问整个64K字节。 3.在位处理中,位地址的表示方式有哪几种? 答:1.直接位地址(00H~0FFH)。例如:20H 2.字节地址带位号。例如:20H.3表示20H单元的3位。 3.特殊功能寄存器名带位号。例如:P0.1表示P0口的1位。 4.位符号地址。例如:TR0是定时/计数器T0的启动位。 4.写出完成下列操作的指令。 (1)R0的内容送到R1中。 MOV A,R0 MOV R1,A (2)片内RAM的20H单元内容送到片内RAM的40H单元中。 MOV 40H,20H (3)片内RAM的30H单元内容送到片外RAM的50H单元中。 MOV A,30H MOV R0,#50H MOVX @R0,A (4)片内RAM的50H单元内容送到片外RAM的3000H 单元中。 MOV A,50H MOV DPTR,#3000H MOVX @DPTR,A (5)片外RAM的2000H单元内容送到片内RAM的20H 单元中。 MOV DPTR,#2000H MOVX A,@DPTR MOV 20H,A (6)片外RAM的1000H单元内容送到片外RAM的4000H 单元中。 MOV DPTR,#1000H MOVX A,@DPTR MOV DPTR,#4000H MOV @DPTR,A (7)ROM的1000H单元内容送到片内RAM的50H单元中。 MOV A,#0 MOV DPTR,#1000H MOVC A,@A+DPTR MOV 50H,A (8)ROM的1000H单元内容送到片外RAM的1000H单元中。 MOV A,#0 MOV DPTR,#1000H MOVC A,@A+DPTR MOVX @DPTR,A 5.区分下列指令有什么不同? (1)MOV A,20H和MOV A,#20H 答:前者源操作数是直接寻址,后者源操作数立即寻址。 (2)MOV A,@R1和MOVX A,@R1 答:前者源操作数是访问片内数据存储器,后者源操作数访问片外数据存储器低256字节。 (3)MOV A,R1和MOV A,@R1 答:前者源操作数是寄存器寻址,后者源操作数寄存器间接寻址。 (4)MOVX A,@R1和MOVX A,@DPTR 答:前者源操作数是访问片外数据存储器低256字节,后者源操作数访问片外数据存储器整个64K字节。 (5)MOVX A,@DPTR和MOVC A,@A+DPTR 答:前者源操作数是访问片外数据存储器,后者源操作数访问程序数据存储器。 6.设片内RAM的(20H)=40H,(40H)=10H,(10H)=50H,(P1)=0CAH。分析下列指令执行后片内RAM的20H、40H、10H单元以及P1、P2中的内容。 MOV R0,#20H ;R0=20H MOV A,@R0 ;A=40H MOV R1,A ;R1=40H MOV A,@R1 ;A=10H MOV @R0,P1 ;(40H)=0CAH MOV P2,P1 ;P2=0CAH MOV 10H,A ;(10H)=10H 1
AD转换实验 一、转换原理 MSP430F149勺A/D转换器原理请参考相关书籍。实验板上与AD相关的硬件电路: RV3 10K ------------ 3-3\ J6 P61 SI?2 Al)输入电路 RV4 III-10K f > 2 ; ||| 二、转换程序 1、程序1:转换结果发送到PC 主程序中进行A/D初始化,中断服务程序读A/D转换结果,主程序中通过串口发送结果。
“ main 、c ”主程序与中断程序: /********************************************************* 程序功能:将ADC 对P6、0端口电压的转换结果按转换数据与对应的 模拟电压的形式通过 串口发送到 PC 机屏幕上显示 通信格式 :N 、 8、 1, 9600 测试说明 :打开串口调试精灵 ,正确设置通信格式 ,观察接收数据 **********************************************************/ #include
第5章 I/O口应用-显示与开关/键盘输入 思考题及习题5 1.判断下列说法是否正确。 A.HD7279是用于键盘和LED数码管的专用接口芯片。答:对 B.LED数码管的字型码是固定不变的。答:错 C.为给扫描法工作的88非编码键盘提供接口电路,在接口电路中需要提供两个8位并行的输入口和一个8位并行的输出口。答:错 D.LED数码管工作于动态显示方式时,同一时间只有一个数码管被点亮。答:对 2.动态显示的数码管,任一时刻只有一个LED处于点亮状态,是LED的余辉与人眼的“视觉暂留”造成数码管同时显示的“假象”。答:对 3.为什么要消除按键的机械抖动软件消除按键机械抖动的原理是什么 答:消除按键的机械抖动,避免由于机械抖动造成的对键盘是否按下误判。软件消除按键机械抖动的原理是采用软件延时,躲过键盘按键的机械抖动期。 4.LED的静态显示方式与动态显示方式有何区别各有什么优缺点 答:静态显示时,欲显示的数据是分开送到每一位LED上的。而动态显示则是数据是同时送到每一个LED上,再根据位选线来确定是哪一位LED被显示。静态显示亮度很高,但口线占用较多。动态显示口线占用较少,但是需要编程进行动态扫描,适合用在显示位数较多的场合。 5.分别写出表5-1中共阴极和共阳极LED数码管仅显示小数点“.”的段码。 答: 80H(共阴极);7FH(共阳极)。 6. 已知8段共阴极LED数码显示器要显示某字符的段码为7DH(a段为最低位),此时显示器显示 的字符为。 答:6 7.已知8段共阳极LED数码显示器要显示字符“6”(a段为最低位),此时的段码为。。答:82H 8.当键盘的按键数目少于8个时,应采用式键盘。当键盘的按键数目为64个时,应采用式键盘。 答:独立式,矩阵式