单片机数据传送指令
【教学目标】
1、认知目标
(1)了解项目设计的过程;
(2)掌握单片机程序基本格式;
(3)掌握数据传送指令;
2、技能目标
掌握单片机程序设计基本格式。
3、能力目标
对学生思维能力进行拓展,激发他们探索单片机奥秘的欲望。
【教学重点】
(1)项目设计的过程
(2)单片机程序基本格式
【教学难点】
(1)单片机程序基本格式
(2)数据传送指令使用方法
【教学方法】
讲授法项目法
【授课地点】
普通教室,不使用多媒体
【教学过程】
一、复习引入新课
复习单片机基本结构与组成。
提问:生活中的一盏灯是如何控制的?
学生思考回答:
引出我们能否使用单片机控制的方式来实现?
学生思考…………。
二、切入课堂内容
1、数据传送类指令
作用:将数据传送到相应端口输出。
格式:MOV 【目的操作数】,【源操作数】
1
传送方向:目的操作数 源操作数
例:MOV A #55H ;将55H传送到累加器A中
2、实例项目
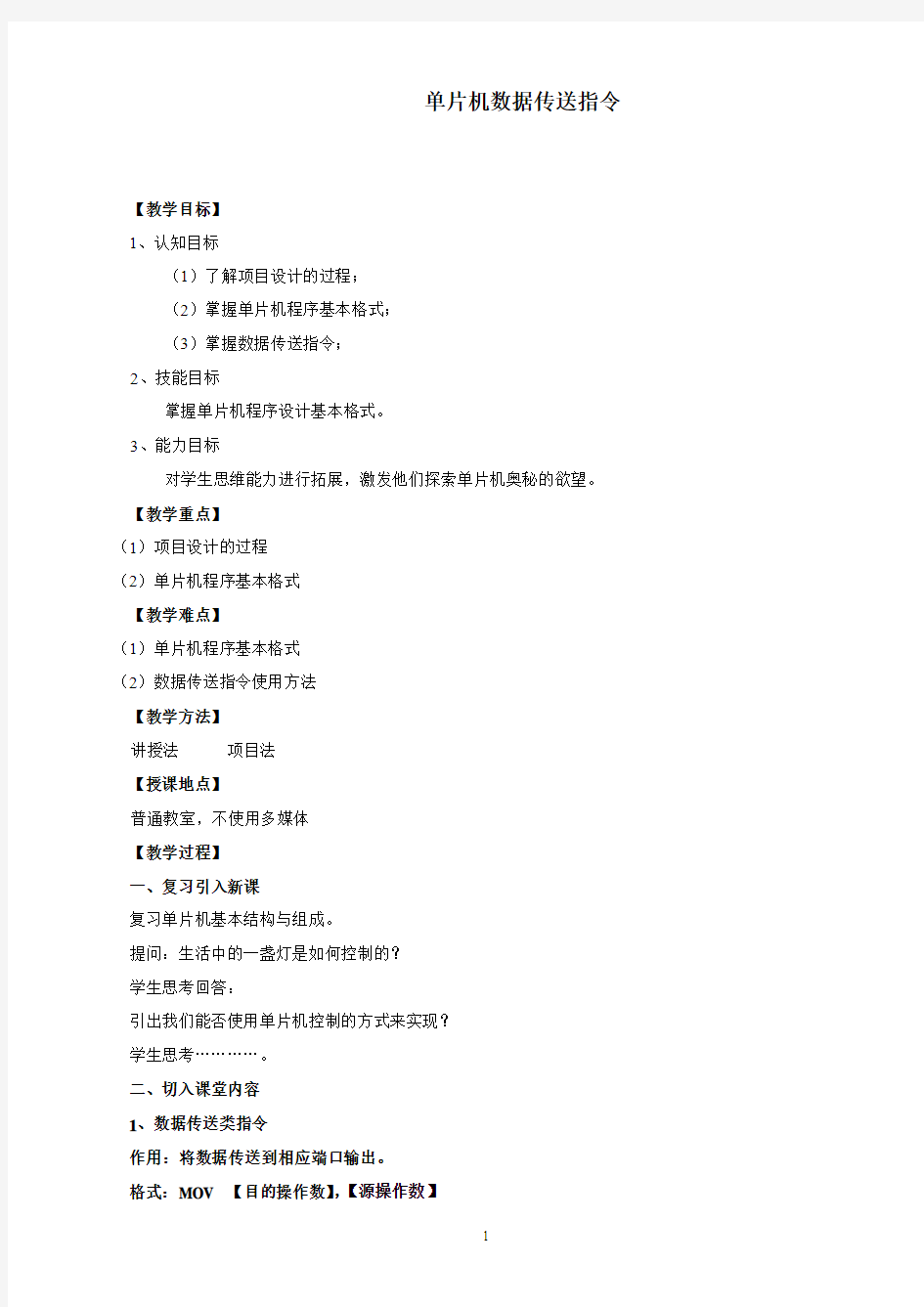
点亮P1.0所接LED灯
(1)项目分析:
LED
图中可知:欲使LED灯点亮,即P1.0端口输出高电平,即输出1即可。
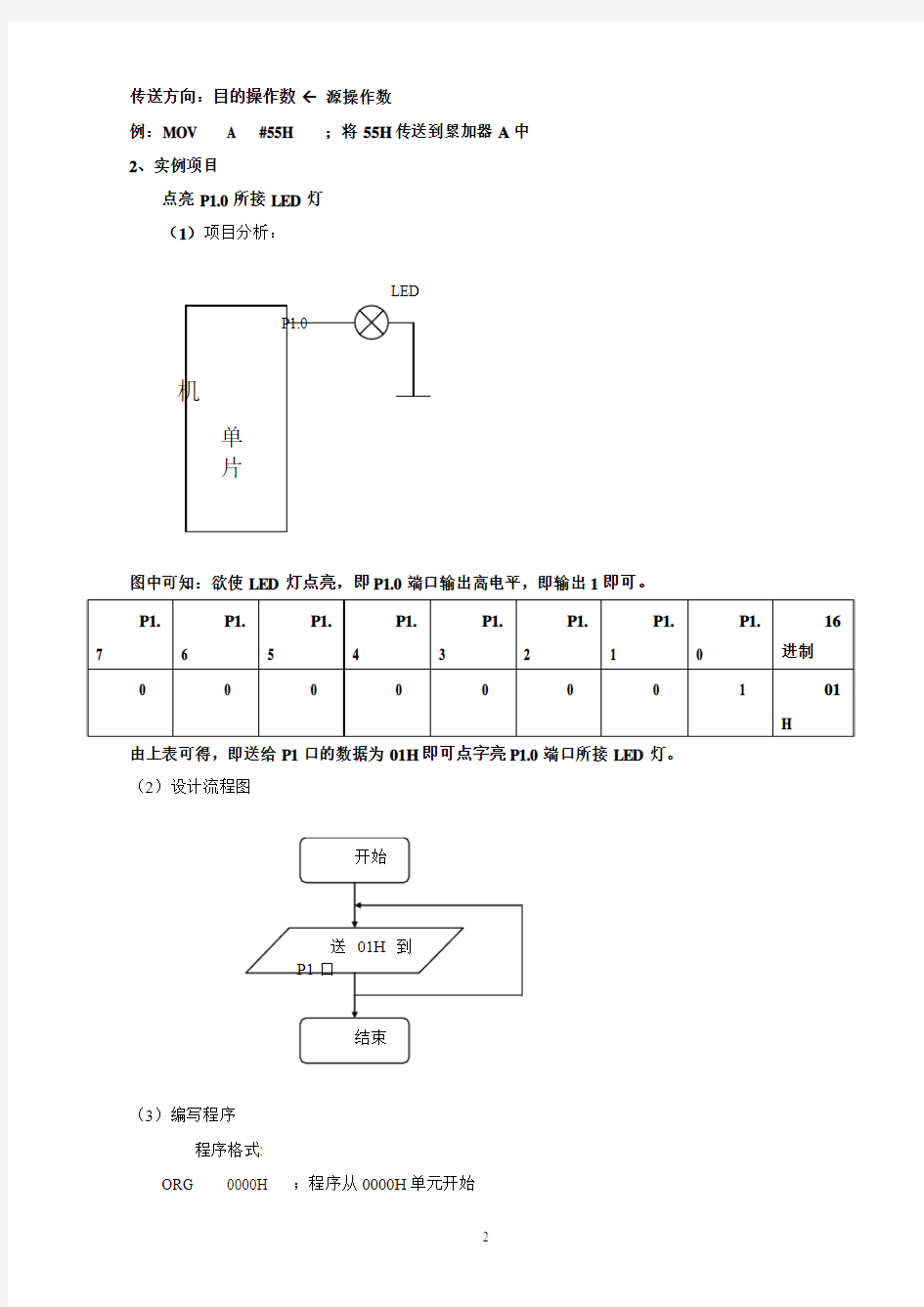
由上表可得,即送给P1口的数据为01H即可点字亮P1.0端口所接LED灯。(2)设计流程图
(3)编写程序
程序格式:
ORG 0000H ;程序从0000H单元开始
2
LJMP MAIN ;跳转到MAIN处执行
ORG 0030H ;数据存放从0030H单元开始
MAIN: ;MAIN标号
MOV P1,#01H ;将01H送入P1口,显示P1.0所接LED
LJMP MAIN ;跳转到MAIN处执行
END ;程序结束
3、拓展思维
(1)如何点亮P1口所接8只LED灯。
(2)如何实现P1口所接8只LED灯向左依次点亮(流水灯)。
【教学反思】
本节课程重点讲授一个简单项目,从而使学生对单片机开发有更直接的理解。用实现讲解指令,比单独讲解指令更明确,更容易理解其作用和用法。
3
实验名称: 数据传送实验 实验类型: 设计性实验 姓名:袁志生 时间:第五六节课 一、实验目的与要求 实验目的:1、掌握单片机的汇编指令系统及汇编语言程序设计方法。 2、掌握单片机的存储器体系结构。 3、熟悉keil软件的功能和使用方法。 4、掌握单片机应用程序的调试方法。 实验要求:1、实现单片机内部RAM之间,外部RAM之间以及内部RAM 与外部RAM之间的数据传送。 2、利用Keil软件编辑、汇编、调试、运行实验程序并记录实验数据。 二、设计要求 1、编写程序将00H~0FH 16个数据分别送到单片机内部RAM 30H~3FH 单元中。 2、编写程序将片内RAM 30H~3FH的内容传送至片内RAM 40~4FH单元中。 3、编写程序将片内RAM 40H~4FH单元中的内容传送到外部RAM 4800H~480FH单元中。 4、编写程序将片外4800H~480FH单元内容送到外部RAM 5800H~580FH 单元中。 5、编写程序将片外RAM 5800H~580FH单元内容传送回片内RAM 50H~5FH 单元中。
三、实验程序流程框图和程序清单.
程序清单: ORG 0000H START: MOV R0, #30H MOV DPTR, #QW1 MOV R5, #0 MOV R7, #16 LOOP: MOV A, R5 MOVC A, @A+DPTR MOV @R0, A INC R0 INC R5 DJNZ R7, LOOP LJMP QW2 QW1: DB 00H, 01H, 02H, 03H, 04H, 05H, 06H, 07H DB 08H, 09H, 0AH, 0BH, 0CH, 0DH, 0EH, 0FH QW2: MOV R0, #30H MOV R1, #40H MOV R5, #16 LOOP1: MOV A, @R0 MOV @R1, A INC R0 INC R1 DJNZ R5, LOOP1 MOV R1, #40H MOV DPTR, #4800H MOV R5, #16 LOOP2: MOV A, @R1 MOVX @DPTR, A INC R1 INC DPTR DJNZ R5, LOOP2 MOV SP, #60H MOV 11H, #48H MOV 10H, #58H MOV R2, #00H LOOP3: MOV DPL, R2 PUSH 10H PUSH 11H
实验五眼图 一、实验目的: 1、理解受限信道上的数据传输率; 2、观察眼图,分析不同参数设置对眼图的影响。 二、实验原理 当一个信号通过一个受限的信道时,它的波形将发生变化。如图5-1所示,当数据传输率提高时,波形的失真也增大,甚至使得数据不能传输。 图5-1 受限信道中的波形的前后变化 眼图通常用于实时观察一个数字数据序列,它能够表达出很多有关传输质量的信息,而做这些仅一个常用的示波器和一位时钟序列就可以了。通过观察眼图,可以测量出传输的质量及接收到的数据中发生错误的可能性。其原理图如图5-2所示: 图5-2 眼图产生的原理 一个典型的眼图通常是用来显示传输在一个受限信道上的二进制序列,而这个受限的信道是忽略了噪音的。如图5-3所示: 图5-3眼图
三、实验设备 1、主机TIMS-301F 2、TIMS基本插入模块 (1)TIMS-153序列产生器(Sequence generator) (2)TIMS-148音频振荡器(Audio Oscillator) (3)TIMS-153 可调低通滤波器(Tuneable LPF) 3、计算机 4、PICO虚拟设备 四、实验步骤: 1、将TIMS系统中的音频振荡器(Audio Oscillator)、序列产生器(Sequence generator)、可调低通滤波器(Tuneable LPF)三个模块按图5-4连接。 2、PICO软件的设置:打开PICO软件,设置眼图参数。在“Settings”菜单中选择“Options”选项,如下图所示: 在弹出的窗口菜单中,在“Sco pe options”里的“Data to display”项选择“Accumulate”。如下图所示:
数据传送实验 验证性实验 2012年10月31日第三四节课 一、实验目的 1、掌握单片机的汇编指令系统及汇编语言程序设计方法。 2、掌握单片机的存储器体系结构。 3、熟悉Keil软件的功能和使用方法。 4、掌握单片机应用程序的调试方法。 二、设计要求 1、编写程序将00H~0FH 16个数据送到单片机内部RAM 30H~3FH单元中。 2、编写程序将片内RAM 30H~3FH的内容传送至片内RAM 40~4FH单元中。 3、编写程序将片内RAM 40H~4FH单元中的内容传送到外部RAM 4800H~480FH单元中。 4、编程将片外4800H~480FH单元内容送到外部RAM 5800H~580FH单元中。 5、编写程序将片外RAM 5800H~580FH单元内容传送回片内RAM 50H~5FH 单元中。 三、实验程序流程框图
四、程序清单 ORG 0000H MOV R0, #30H ;初始化数据指针 MOV A, #00H MOV R2, #10H ;设置循环次数LOOP1: MOV @R0, A ;循环体部分 INC R0 ;修改数据指针 INC A DJNZ R2, LOOP1 ;循环控制部分 MOV R0, #30H ;初始化数据指针 MOV R1, #40H MOV R2, #10H LOOP2: MOV A, @R0 ;循环体部分 MOV @R1, A INC R0 ;修改数据指针 INC R1 DJNZ R2, LOOP2 ;循环控制部分
MOV R1, #40H ;设置数据指针R0单元内容 MOV DPTR, #4800H ;外部RAM4800H单元地址作为16位立即数送数 据指针DPTR MOV R2, #10H ;设置循环次数 LOOP3: MOV A, @R1 ;循环体部分 MOVX @DPTR, A INC R1 ;修改数据指针 INC DPTR DJNZ R2, LOOP3 ;循环控制部分 MOV R0, #00H ;初始化数据指针 MOV R1, #48H MOV R2, #58H LOOP4: MOV DPL, R0 ;设置数据指针的低八位内容 MOV DPH, R1 ;设置数据指针的高八位内容 MOVX A, @DPTR ;将外部RAM内容送累加器A MOV DPH, R2 ;重新设置数据指针高八位内容 MOVX @DPTR, A ;将累加器A的内容送回外部RAM INC R0 ;修改数据指针 CJNE R0, #10H, LOOP4 ;循环控制部分 MOV R0, #50H ;初始化数据指针 MOV DPTR, #5800H MOV R2, #10H CLR A ;累加器A清零 LOOP5: MOVX A, @DPTR ;循环体部分 MOV @R0, A INC R0 ;修改数据指针 INC DPTR DJNZ R2, LOOP5 ;循环控制部分 END 五、程序数据
单片机的累加器A与片外RAM之间的数据传递类指令 MOVX A,@Ri MOVX @Ri,A MOVX A,@DPTR MOVX @DPTR,A 说明: 1)在51系列单片机中,与外部存储器RAM打交道的只能是A累加器。所有需要传送入外部RAM的数据必需要通过A送去,而所有要读入的外部RAM中的数据也必需通过A读入。在此我们能看出内外部RAM的区别了,内部RAM间能直接进行数据的传递,而外部则不行,比如,要将外部RAM中某一单元(设为0100H单元的数据)送入另一个单元(设为0 200H单元),也必须先将0100H单元中的内容读入A,然后再传送到0200H单元中去。 要读或写外部的RAM,当然也必须要知道RAM的地址,在后两条单片机指令中,地址是被直接放在DPTR中的。而前两条指令,由于Ri(即R0或R1)只是一个8位的寄存器,所以只供给低8位地址。因为有时扩展的外部RAM的数量比较少,少于或等于256个,就只需要供给8位地址就够了。 使用时应当首先将要读或写的地址送入DPTR或Ri中,然后再用读写命令。 例:将单片机外部RAM中100H单元中的内容送入外部RAM中200H单元中。 MOV DPTR,#0100H MOVX A,@DPTR MOV DPTR,#0200H MOVX @DPTR,A 程序存储器向累加器A传送指令
MOVC A,@A+DPTR 本指令是将ROM中的数送入A中。本指令也被称为单片机查表指令,常用此指令来查一个已做好在ROM中的表格说明: 此条指令引出一个新的寻址办法:变址寻址。本指令是要在ROM的一个地址单元中找出数据,显然必须知道这个单元的地址,这个单元的地址是这样确定的:在执行本指令立脚点D PTR中有一个数,A中有一个数,执行指令时,将A和DPTR中的数加起为,就成为要查找的单元的地址。 查找到的结果被放在A中,因此,本条指令执行前后,A中的值不一定相同。 例:有一个数在R0中,要求用查表的办法确定它的平方值(此数的取值范围是0-5) MOV DPTR,#TABLE MOV A,R0 MOVC A,@A+DPTR TABLE: DB 0,1,4,9,16,25 设R0中的值为2,送入A中,而DPTR中的值则为TABLE,则最终确定的ROM单元的地址就是TABLE+2,也就是到这个单元中去取数,取到的是4,显然它正是2的平方。其它数据也能类推。 标号的真实含义:从这个地方也能看到另一个问题,我们使用了标号来替代具体的单元地址。事实上,标号的真实含义就是地址数值。在这里它代表了,0,1,4,9,16,25这几个数据在ROM中存放的起点位置。而在以前我们学过的如LCALL DELAY单片机指令中,DE LAY 则代表了以DELAY为标号的那段程序在ROM中存放的起始地址。事实上,CPU正是通过这个地址才找到这段程序的。 能通过以下的例程再来看一看标号的含义: MOV DPTR,#100H
微机原理上机实验(一)实验报告 主题:数据传送 一、实验目的 熟悉星研集成环境软件的使用方法。熟悉Borland公司的TASM编译器 熟悉8086汇编指令,能自己编写简单的程序,掌握数据传输的方法。 二、实验内容 1、熟悉星研集成环境软件。 2、编写程序,实现数据段的传送、校验。 三、实验代码 _STACK SEGMENT STACK DW 100 DUP() _STACK ENDS DATA SEGMENT DATA ENDS CODE SEGMENT START PROC NEAR ASSUME CS:CODE, DS:DATA, SS:_STACK MOV AX, DATA ;将数据段的地址存入AX寄存器。AX=004DH MOV DS,AX ;对DS段寄存器赋值。DS=004DH MOV ES,AX ;对ES段寄存器赋值。ES=004DH NOP ;空指令
MOV CX,100H ;把100H送到CX寄存器。CX=0100H MOV SI,3000H ;把3000H送到SI寄存器。SI=3000H MOV DI,6000H ;把6000H送到DI寄存器。DI=6000H CALL Move ;调用Move子程序 MOV CX,100H ;把100H送到CX寄存器。CX=0100H MOV SI,3000H ;把3000H送到SI寄存器。SI=3000H MOV DI,6000H ;把6000H送到DI寄存器。DI=6000H CLD ;将DF标志位置0。设置SI、DI为递增移动,DF=0 REPE CMPSB ;比较[SI]和[DI],CX减1,ZF=0或CX=0跳出 ;若ZF=0或CX=0不成立,则继续比较。SI和DI持续递增 1 JNE ERROR ;若ZF=0,跳到ERROR子程序 TRUE: JMP $ ;跳到目前地址 ERROR: JMP $ ;跳到目前地址 Move PROC NEAR ;Move子程序 CLD ;将DF标志位置0。设置SI、DI为递增移动。DF=0 CMP SI,DI ;比较SI、DICF=SF=PF=1,仅有该三个标志位变化JZ Return ;如果相等,跳到Return JNB Move1 ;如果SI大于等于DI,跳到Move1 ADD SI,CX ;SI=SI+CX。SI=3100H DEC SI ;SI减1。SI=30FFH
3.2.1 数据传送类指令 数据传送指令用于实现寄存器与存储器之间、寄存器之间、累加器AL/AX与I/O端口之间、立即数到寄存器或存储器之间的字节或字的传送。这类指令的共同特点是不影响标志寄存器的内容(SAHF,POPF除外)。堆栈操作指令、标志位传送指令和地址传送指令也归入这一类中,共14条指令,又可分为4组,如表3.4所示。 1.通用数据传送指令 通用数据传送指令包括传送指令MOV、堆栈操作指令PUSH、POP、输入/输出指令(累加器传送指令)、数据交换指令XCHG和查表转换指令XLAT。这类指令是唯一允许以段寄存器作为操作数的指令(XCHG除外)。 表3.4 数据传送类指令 指令类型指令书写格式指令功能 通用数据传送指令MOV 目标,源 PUSH 源 POP 目标 XCHG 目标,源 XLAT 字节或字传送 字压入堆栈 字弹出堆栈 字节或字交换 字节翻译 目标地址传送指令LEA 目标,源 LDS 目标,源 LES 目标,源装入有效地址
装入DS寄存器 装入ES寄存器 标志位传送指令LAHF SAHF PUSHF POPF 将FR低字节装入AH寄存器 将AH内容装入FR低字节 将FR内容压入堆域 从堆栈弹出FR内容 I/O数据传送指令IN 累加器,端口 OUT 端口,累加器从端口输入字节或字 将字节或字输出到端口 (1)MOV 传送指令 指令格式:MOV OPD,OPS 指令功能:将源操作数OPS传送到目的操作数OPD,即(OPD)→(OPS)。 源操作数OPS可以是8/16位的通用寄存器、段寄存器、存储器中某单元或8/16位的立即数。 (2)PUSH进栈(压入)指令 指令格式:PUSH OPS 指令功能:将源操作数OPS压入堆栈,即SP–2 → SP,OPS → (SPH,SP)。 源操作数0PS可以是16位通用寄存器、段寄存器或存储器中的数据字,以保证堆栈按―字‖操作。源操作数OPS不能是立即数。 由于堆栈是按―后进先出‖方式工作,所以每次执行PUSH指令时,总是首先修改栈指针(S P)–2 → SP (即SP先减2),使之指向新栈顶,然后把源操作数压入堆栈中SP所指示
数据传送实验报告 西安交通大学 文少轩 一、实验目的 1.熟悉8086指令系统的数据传送指令及8086的寻址方式; 2.利用Turbo Debugger(TD.EXE)调试工具来调试汇编语言程序。 二、实验设备 IBM-PC 微型计算机一台 三、实验要求 1. 复习8086指令系统中的数据传送类指令和8086的寻址方式; 2. 预习Turbo Debugger的使用方法; 3. 按照题目要求预先编写好实验中的程序段。 四、实验内容及数据记录 1.通过述程序段的输入和执行来熟悉Turbo Debugger的使用,并通过显示器屏幕观察程 序的执行情况。练习程序段如下: 2.用以下程序段将一组数据压入PUSH堆栈区,然后通过三种不同的出栈方式出栈,查看
4.设置各寄存器及存储单元的内容如下:
5.将DS:1000H字节存储单元中的内容送到DS:2020H单元中存放。试分别用8086的直接 寻址、寄存器间接寻址、变址寻址、寄存器相对寻址传送指令编写程序段,并上机验证结果。 先对DS:1000H和DS:2020H单元赋值,结果如下:
6.设AX寄存器中的内容为1111H,BX寄存器中的内容为2222H,DS:0010H单元中的内容 为3333H。将AX寄存器中的内容与BX寄存器中的内容交换。试编写程序段,并上机验 7.设DS=6000H,ES=6100H,存储器中的内容如下图所示。要求将DS段的内容传送到AX 寄存器,DS
五、实验小结 1.Turbo Debugger界面虽然不华丽,但是很实用; 2.各寄存器的状态、内容直观地从界面中显示出来,程序执行造成的内容变化以高亮状态显示,方便跟踪程序每一步运行的结果; 3.修改各寄存器或者某内存单元的内容很方便,可以直接从键盘输入。 4.
实验2 数据块传送实验程序设计实验 实验目的 ㈠学习和掌握DSP汇编语言程序的基本结构。 ㈡熟悉和掌握常用的数据传送类指令。熟练掌握数据块传送的方法。 二、实验原理 数据传送的常用指令 数据存储器((数据存储器:MVDK Smem,dmad MVKD dmad,Smem MVDD Xmem,Ymem 数据存储器((MMR:MVDM dmad,MMR MVMD MMR,dmad MVMM mmr,mmr 程序存储器((数据存储器MVPD Pmad,Smem MVDP Smem,Pmad READA Smem WRITA Smem Smem——数据存储器的地址;Pmad——16位立即数程序存储器地址;MMR——任何一个存储映象寄存器;Xmem,Ymem——双操作数数据存储器地址;dmad——16位立即数数据存储器地址; 数据传送指令是最常用的一类指令,与RPT指令相结合,可以实现数据块传送。例如,在系统初始化过程中,可以将数据表格与文本一道驻留在程序存储器中,复位后通过程序存储器到数据存储器的数据块传送将数据表格传送到数据存储器,从而不需要配制数据ROM,使系统的成本降低。另外,在数字信号处理(如FFT)时,经常需要将数据存储器中的一批数据传送到数据存储器的另一个地址空间等等。 实验内容 阅读实验程序example,上机运行程序后,查看: ㈠检查程序存储器(PM)1000H~101DH空间中的内容,检查程序存储器(PM)FF80H~FF83H空间中的内容。 ㈡数据存储器(DM)60H~69H(.bss)空间中的内容是什么? ㈢数据存储器(DM)80H~90H(STACK)空间中的内容是什么?
竭诚为您提供优质文档/双击可除单片机数据传送实验报告 篇一:单片机数据传送实验报告 实验名称:数据传送实验 实验类型:设计性实验 姓名:袁志生 时间:04.17第五六节课 一、实验目的与要求 实验目的:1、掌握单片机的汇编指令系统及汇编语言程序设计方法。 2、掌握单片机的存储器体系结构。 3、熟悉keil软件的功能和使用方法。 4、掌握单片机应用程序的调试方法。 实验要求:1、实现单片机内部RAm之间,外部RAm之间以及内部RAm与外部RAm之间的数据传送。 2、利用Keil软件编辑、汇编、调试、运行实验程序并记录实验数据。 二、设计要求
1、编写程序将00h~0Fh16个数据分别送到单片机内部RAm30h~3Fh单元中。 2、编写程序将片内RAm30h~3Fh的内容传送至片内RAm40~4Fh单元中。 3、编写程序将片内RAm40h~4Fh单元中的内容传送到外部RAm4800h~480Fh单元中。 4、编写程序将片外4800h~480Fh单元内容送到外部RAm5800h~580Fh单元中。 5、编写程序将片外RAm5800h~580Fh单元内容传送回片内RAm50h~5Fh单元中。 三、实验程序流程框图和程序清单. 程序清单: oRg0000h sTART:moVR0,#30h moVDpTR,#Qw1 moVR5,#0 Loop: Qw1: Qw2: Loop1: Loop2: Loop3:
R7,#16A,R5A,@A+DpTR@R0,AR0IncR5R7,LoopQw200h,01h,02 h,03h,04h,05h,06h,07h08h,09h,0Ah,0bh,0ch,0Dh,0eh,0F hR0,#30hR1,#40hmoVR5,#16A,@R0@R1,AR0R1R5,Loop1R1,#4 0hmoVDpTR,#4800hR5,#16A,@R1@DpTR,AR1DpTRR5,Loop2moV sp,#60h11h,#48h10h,#58hR2,#00hDpL,R210h11hDphmoVxA, @DpTRmoVmoVmoVcmoVIncDJnZLJmpDbDbmoVmoVmoVmoVIncInc DJnZmoVmoVmoVmoVxIncIncDJnZmoVmoVmoVmoVpushpushpop pop moVx Inc cJne moV moV moV Loop4:moVx moV Inc Inc DJnZ enD 四,实验小结
实验一单片机数据区传送程序设计 一、实验目的 1.进一步掌握汇编语言程序设计和调试方法。 2.了解单片机RAM中的数据操作 二、实验说明 要求:编写程序把R2、R3源RAM区首地址内的R6、R7字节数据传送到R4、R5目的地址的RAM区。 三、实验仪器 计算机 伟福软件(lab2000P ) 四、实验内容 在R0、R1中输入源地址(例如:3000H),R2、R3中输入目的地址(例如4000H),R6、R7中输入字节数(例如:1FFFH)。 查看RAM 区3000~30FFH和4000~40FFH内容,也可自己重新赋值。 运行程序,首先单步,然后用执行到指定位置,最后用连续运行方式。 记录下运行结果,检查3000~30FFH中内容是否和4000~40FFH内容完全一致。 五、思考题 1、改变源地址,例如00FFH; 2、改变目的地址,例如2000H; 3、改变传输的个数,小于256个和大于256个的情况。 4、把程序改为对某一数据存储区RAM赋都相同一个数值。 六、源程序及其修改原理 org 0000H Block equ 2000h mov dptr, #Block ; 起始地址 mov r0,#12h mov a,#20h ;修改2000h开始的地址所存放的内容为20h Loop: mov r1,#14h ;增加r1计数,用循环方式实现大于256的数据传输(思 考题3) Loop1: movx @dptr,a inc dptr ; 指向下一个地址 djnz r1,Loop1 djnz r0, Loop ; 双循环实现r0,r1计数相乘 (以上程序实现对某一数据存储区2000h~2168hRAM赋都相同一个数值20h,思考题4) mov r0, #20h ;改变源地址为2000h(思考题1) mov r1, #00h mov r2, #50h;改变目的地址为5000h(思考题2) mov r3, #00h
汇编传送指令 r8——任意一个8位通用寄存器AH/AL/BH/BL/CH/CL/DH/DL r16——任意一个16通用寄存器AX/BX/CX/DX/SI/DI/BP/SP reg——代表r8或r16 seg——段寄存器CS/DS/ES/SS m8——一个8位存储器操作数单元(包括所有主存寻址方式) m16——一个16位存储器操作数单元(包括所有主存寻址方式) mem——代表m8或m16 i8——一个8位立即数 i16——一个16位立即数 imm——代表i8或i16 dest——目的操作数 src——源操作数 ---------------------------------------------------------------------------------------------------------------------------- 一、通用数据传送指令 1、传送指令MOV 格式:MOV dest,src ;dest←src MOV指令把一个字节或字的操作数从源地址src传送至目的地址dest。源操作数可以是立即数、寄存器或是主存单元,目的操作数可以是寄存器或主存单元,但不能是立即数。用约定的符号表达如下: MOV reg/mem, imm ;立即数送寄存器或是存储器 MOV reg/mem/seg, reg ;寄存器送寄存器(包括段寄存器)或贮存 MOV reg/seg, mem ;主存送寄存器(包括段寄存器) MOV reg/mem, seg ;段寄存器送主存或寄存器 特别说明:(1)立即数传送至通用寄存器(不包括段寄存器)或存储单元MOV reg/mem,imm 例: mov al,4 ;al←4,字节传送 mov cx,0ffh ;cx←00ffh,字传送 mov byte ptr [si],0ah ;ds:[si]←0ah, byte ptr说明是字节操作 mov word ptr [si+2],0bh ;ds:[si+2]←0bh, word ptr 说明是字操作 绝大多数说操作数的指令中(除非特别说明)目的操作数与源操作数必须类型一致,或同为字节,或同为字,否则为非法指令。8086不允许立即数传送至段寄存器。 特别说明(2)8086指令系统除串操作类指令外,不允许两个操作数都是存储单元,所以也就没有主存至主存的数据传送。可以通过寄存器间接实现 。例: mov ax,buffer1 ;ax←buffer1(将buffer1内容送ax)
课程名称:_________微机原理及应用___________指导老师:_____钟崴_______成绩:__________________ 实验名称:_________数据传送___________实验类型:________________同组学生姓名:__________ 一、实验目的和要求(必填)二、实验内容和原理(必填) 三、主要仪器设备(必填)四、操作方法和实验步骤 五、实验数据记录和处理六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求(必填) 掌握MCS-51指令系统中的数据传送类指令的应用,通过实验,切实掌握数据传送类指令的各种不同的寻址方式的应用。 二、实验内容和原理(必填) 1.编制一段程序,要求程序中包含7中不同寻址方式。 2.编制一段程序,将片内RAM30H~32H中的数据传送到片内RAM38H~3AH中。 3.编制一段程序,将片内RAM30H~32H中的数据传送到片外RAM1000H~1002H中。 4.编制一段程序,将片内RAM40H~42H中的数据与片外RAM2000H~2002H中的数据互换。 三、主要仪器设备(必填) PC机一台。 四、操作方法和实验步骤 逐段编制程序,汇编无误后,用连续或者单步的方式运行程序,检查程序的运行结果,看是否达到预期的效果。 五、程序清单 1. ORG 0000H CLEAR MOV R0,#30H ;间接寻址 MOV A,#40H ;立即寻址 MOV @R0,A ;间接寻址 MOV A,30H ;直接寻址 MOV DPTR,#0100H ;间接寻址 MOV A,#36H MOVX @DPTR,A MOV R0,#50H ;立即寻址 MOV A,#10 MOVC A,@A+DPTR ;变址寻址 END
数据传送实验 一、实验目的 1、掌握单片机的汇编指令系统及汇编语言程序设计方法。 2、掌握单片机的存储器体系结构。 3、熟悉Keil软件的功能和使用方法。 4、掌握单片机应用程序的调试方法。 二、实验内容或原理 1、实现单片机内部RAM之间,外部RAM之间以及内部RAM 与外部RAM之间的数据传送。 2、利用Keil软件编辑、汇编、调试、运行实验程序并记 录实验数据。 三、设计要求 1、编写程序将00H~0FH 16个数据分别送到单片机内部 RAM 30H~3FH单元中。 2、编写程序将片内RAM 30H~3FH的内容传送至片内RAM 40~4FH单元中。 3、编写程序将片内RAM 40H~4FH单元中的内容传送到外 部RAM 4800H~480FH单元中。 4、编写程序将4800H~480FH单元内容送到外部RAM 5800H~580FH单元中。 5、编写程序将片外RAM 5800H~580FH单元内容传送回 片内RAM 50H~5FH单元中。 四、实验报告要求 1、实验目的和要求。 2、设计要求。 3、实验程序流程框图和程序清单。 4、实验总结。 5、思考题。 五、思考题 1、说明MCS-51系列单片机对片内RAM和片外RAM存贮器各有 哪些寻址方式? 2、说明指令MOV A,20H和MOV C,20H中的20H含义有什 么不同?传送指令中的助记符MOV,MOVX,MOVC各适用 于访问哪个存储器空间? 程序如下: ORG 0000H START: LJMP MAIN ORG 0030H MAIN: MOV PSW, #00H MOV R0, #20H MOV R3, #96 ML: MOV @R0, #00H
1.8086指令系统操作数符号表示 DST->目的操作数 SRC->源操作数 TARGET->循环、转移和调用指令操作数 reg->寄存器操作数,字节或字 reg8->寄存器操作数,字节 reg16->寄存器操作数,字 mem->存储器操作数,字节或字 mem8->字节型存储器操作数 mem16->字型存储器操作数 mem32->双字型存储器操作数 acc->累加器AL或AX seg->段寄存器 imm->立即操作数,字节或字 imm8->8位立即操作数 imm16->16位立即操作数 short_label->短标号(8位偏移量) near_label->近标号(16位地址或偏移) far_label->远标号(32位地址) 指令的功能——该指令能够实现何种操作。通常指令助记符就是指令功能的英文单词或其缩写形式 指令支持的寻址方式——该指令中的操作数可以采用何种寻址方式 指令对标志的影响——该指令执行后是否对各个标志位有影响,以及如何影响 其他方面——该指令其他需要特别注意的地方,如指令执行时的约定设置、必须预置的参数、隐含使用的寄存器等 一、数据传送类指令 1.Mov(mov目的操作数,源操作数) 目的操作数:reg、seg、mem 源操作数:reg、seg、mem、imm 注意事项: 1、立即数不能直接送入段寄存器内 2、存储器之间不能互相送数 3、段寄存器之间不能相互送数 4、目的操作数不允许用段寄存器CS 5、送数的时候需要明确是字操作还是字节操作,即源操作数和目的操作数的位数 要统一,除非目的操作数的位数大于源操作数。(寄存器有明确的字节或字类型, 有寄存器参与的指令其操作数类型就是寄存器的类型;对于存储器单元与立即 数同时作为操作数的情况,必须显式指明;byte ptr指示字节类型,word ptr 指示字类型) 如何判断 ?两个操作数都明确了,两者必须一致 ?两个操作数有一个明确,另一个就以明确的为依据
工业大学 计算机科学与技术学院 Project3课程设计 2014-2015学年第二学期 班级:浦电子1203 组员: 组员学号: 指导老师:武晓光,胡方强,包亚萍 袁建华,毛钱萍 2015年7月8日
目录 第一章阶段任务 第二章基于WIFI模块的无线数据传输的原理 1.1 时钟模块 1.2 最小单片机系统的原理 1.3 温度传感器DS18B20 1.4 串口 1.5 WIFI模块 第三章基于WIFI模块的无线数据传输的实现 2.1 WIFI模块设置 2.2 串口部分设置 2.3 调试与运行过程 第四章程序与框图 第五章小结
第一章阶段任务:
第四阶段:2天(2天)写报告 第二章基于WIFI模块的无线数据传输的原理 1.1时钟DS1302模块: 电路原理图:DS1302与单片机的连接也仅需要3条线:CE引脚、SCLK串行时钟引脚、I/O 串行数据引脚,Vcc2为备用电源,外接32.768kHz晶振,为芯片提供计时脉冲。 读写时序说明:DS1302是SPI总线驱动方式。它不仅要向寄存器写入控制字,还需要读取相应寄存器的数据。控制字总是从最低位开始输出。在控制字指令输入后的下一个SCLK时钟的上升沿时,数据被写入DS1302,数据输入从最低位( 0位)开始。同样,在紧跟8位的控制字指令后的下一个SCLK脉冲的下降沿,读出DS1302的数据,读出的数据也是从最低位到最高位。数据读写时序如图
1.2单片机最小系统的原理: 说明 复位电路:由电容串联电阻构成,由图并结合"电容电压不能突变"的性质,可以知道,当系统一上电,RST脚将会出现高电平,并且,这个高电平持续的时间由电路的RC值来决定.典型的51单片机当RST脚的高电平持续两个机器周期以上就将复位,所以,适当组合RC的取值就可以保证可靠的复位. 晶振电路:典型的晶振取11.0592MHz(因为可以准确地得到9600波特率和19200波特率,用于有串口通讯的场合)/12MHz(产生精确的uS级时歇,方便定时操作) 单片机:一片AT89S51/52或其他51系列兼容单片机 特别注意:对于31脚(EA/Vpp),当接高电平时,单片机在复位后从部ROM的0000H开始执行;当接低电平时,复位后直接从外部ROM的0000H开始执行. 1.3温度传感器DS18B20的原理(连接到单片机最小系统,并将温度发送给WIFI模块):
第3章 8086/8088指令系统数据传送指令(1)
MOV AX,1234H MOV AX,[1234H] MOV AX,BX MOV AX,[BX] MOV AX,[BX+02H] MOV AX,[BX+SI] MOV AX,[BX+SI+02H] 请说出右边7条指令中源操作数的寻址方式
用于寄存器、存储器单元、输入输数据传送指令 出端口之间传送数据或地址。(1)通用数据传送指令MOV、PUSH、POP、XCHG (2)累加器专用传送指令IN、 OUT、 XLAT (3)地址传送指令LEA、LDS、LEA (4)状态标志寄存器传送指令LAHF、SAHF、 PUSHF、 POPF
数据传送指令 用于寄存器、存储器单元、输入输 出端口之间传送数据或地址。 (1)通用数据传送指令MOV PUSH、POP、XCHG (2)累加器专用传送指令IN、 OUT、 XLAT (3)地址传送指令LEA、LDS、LEA (4)状态标志寄存器传送指令LAHF、SAHF、 PUSHF、 POPF
MOV 指令 格式: MOV DST, SRC 功能: DST ←(SRC ) ;将源操作数送至目的操作数地址 目的操作数地址 源操作数地址 源/目的操作数之间传送关系图: CS DS,SS,ES 存储器 立即数 AX ,BX ,CX ,DX BP ,SP ,SI ,DI
MOV 指令 格式: MOV DST, SRC 功能: DST ←(SRC ) 目的操作数地址 源操作数地址 源/目的操作数之间传送关系图: 例:将DX 寄存器内容送至CX 。 MOV CX,DX 例:将立即数2000H 送至寄存器BX 。 MOV BX,2000H 例:将CX 寄存器内容送至DX 。 MOV DX,CX 例:将AX 的内容送至ES 。 MOV ES,AX CS DS,SS,ES 存储器 立即数 AX ,BX ,CX ,DX BP ,SP ,SI ,DI
(此文档为word格式,下载后您可任意编辑修改!) 数据采集与传输系统 摘要 该数据采集与传输系统以89C51及89C2051为核心,由数据采集模块、调制解调模块、模拟信道、测试码发生器、噪声模拟器、结果显示模块等构成。在本方案中仅使用通用元器件就较好的实现了题目要求的各项指标。其中调制解调模块、噪声模拟器分别采用单片机和可编程逻辑器件实现。本数据采集与传输系统既可对8路数据进行轮检,也可设置为对一路数据单独监控。本系统硬件设计应用了EDA 工具,软件设计采用了模块化的编程方法。传输码元速率为16kHz~48kHz的二进制数据流。另外,还使用了“1”:“01”、“0”:“10”的Manchester编码方法使数据流的数据位减少,从而提高传输速率。
一、方案设计与论证 首先,我们分析一下信道与信噪比情况。本题中码元传输速率为16k波特,而信号被限定在30k~50kHz的范围内,属于典型的窄带高速率数字通信。而信噪比情况相对较好。这是因为信号带宽仅为20kHz,而噪声近似为0~43kHz()的窄带白噪声,这样即使在信号和噪声幅度比值为1:1的情况下,带内的噪声功率仍然比较小,所以系统具有较高的信噪比。 方案一: 常用的数字调制系统有:ASK、FSK、PSK等。其中FSK具有较强的抗干扰能力,但其要求的的带宽最宽,频带利用率最低,所以首先排除。ASK理论上虽然可行,但在本题目中,由于一个码元内只包括约两个周期的载波,所以采用包络检波法难以解调,也不可行。另外,对于本题目,还可以考虑采用基带编码的方法进行传输,如HDB3码,但这种编码方法其抗干扰能力较差,因此也不太适合。 方案二: PSK调制方式具有较强的抗干扰能力,同时其调制带宽相对也比较窄,因此我们考虑采用这种调制方式。为了简化系统,在实际实现时,我们采用了方波作为载波的PSK调制方式。当要求的数据传输速率较低(≤24kbps)时,对原始数据处理的方法如下:
8外部数据传送指令有哪几条?试比较下面每组中2条指令的区别 (1)MOVX A, @R0 MOVX A, @DPTR (2) MOVX @R0, A MOVX @DPTR, A (2)MOVX A, @R0 MOVX @R0, A 答:外部数据传送指令有如下4条: MOVX A, @DPTR ;(DPTR)→A MOVX @DPTR, A ;A→(DPTR) MOVX A, @Ri ;(Ri)→A,以P2为页地址,Ri为低8位地址 MOVX @Ri,A ;A→(Ri),以P2为页地址,Ri为低8位地址 ①MOVX A, @R0 以R0为低8位地址指针的片外数据存储器中的内容传送到累加器A中 MOVX A, @DPTR 以DPTR为地址指针的片外数据存储器中的内容传送到累加器A中 ②MOVX @R0, A 累加器A中的内容传送到以R0为低8位地址指针的片外数据存储器中 MOVX @DPTR, A 累加器A中的内容传送到以DPTR为地址指针的片外数据存储器中 ③MOVX A, @R0 以R0为低8位地址指针的片外数据存储器中的内容传送到累加器A中 MOVX @R0, A累加器A中的内容传送到以R0为低8位地址指针的片外数据存储器中 9 在80C51片内RAM中,已知(30H)=38H,(38H)=40H,(40H)=48H,(48H)=90H。请分析下段程序中各指令的作用,并翻译成相应的机器码;说明源操作数的寻址方式及顺序执行每条指令后的结果答:机器码源程序寻址方式执行每条指令后的结果E5 40 MOV A,,40H 直接寻址A=48H F8 MOV R0,A 寄存器寻址R0=48H 75 90 F0 MOV P1,#0F0H 立即寻址P1=0F0H A6 30 MOV @R0,30H 寄存器间接寻址R0=48H,(48H)=38H 90 12 46 MOV DPTR, #1246H 立即寻址DPTR=1246H 85 38 40 MOV 40H, 38H 直接寻址(40H)=40H A8 30 MOV R0, 30H 直接寻址R0=38H 88 90 MOV 90H, R0 直接寻址P1=38H 75 48 30 MOV 48H, #30H 立即寻址(48H)=30H E6 MOV A, @R0 寄存器间接寻址R0=38H, A=40H 85 90 A0 MOV P2, P1 寄存器寻址P2=38H 10 试说明下列指令的作用,并将其翻译成机器码。执行最后一条指令对PSW有何影响,A的终值为多少? ①机器码源程序执行每条指令后的结果 78 72 MOV R0,#72H 把立即数72H送入R0 E8 MOV A, R0 把72H送入A 24 4B MOV ADD, #4BH 72H加4BH等于BDH送入A 执行此指令后PSW中P=0,OV=0,CY=0 ②机器码源程序执行每条指令后的结果 74 02 MOV A, #02H 把立即数2H送入A F5 F0 MOV B, A 把2H送入B 74 0A MOV A, #0AH 把立即数#0AH送入A 25 F0 ADD A, B A与B中值相加等于0CH,送入A A4 MUL AB A与B中值相乘等于018H,送入A 执行此指令后PSW中P=0,OV=0,CY=0 ③机器码源程序执行每条指令后的结果 74 20 MOV A, #20H 把立即数20H送入A F5 F0 MOV B, A 把20H送入B 25 F0 ADD A, B A与B中值相加等于40H,送入A
西北工业大学明德学院 实验报告 实验项目微机原理及应用 班级 121204 姓名田家豪王辰硕 学号 121566 121567 指导老师伍明高 时间 2015-4-7
数据传送实验 实验目的 (1) 熟悉Tdpit集成环境和调试器的使用。 (2) 掌握与数据有关的不同寻址方式。 实验内容 本实验要求将数据段中的一个字符串传送到附加段中,并输出附加段中的目标字符串到屏幕上。 实验程序如下: DDATA SEGMENT ;定义源数据段 MSR DB "HELLO,WORLD!$" LEN EQU $- MSR DDATA ENDS EXDA SEGMENT ;定义附加数据段 MSD DB LEN DUP(?) EXDA ENDS MYSTACK SEGMENT STACK ;定义堆栈段 DW 20 DUP(?) MYSTACK ENDS CODE SEGMENT ;定义代码段 ASSUME CS:CODE,DS:DDATA,ES:EXDA START: MOV AX,DDATA MOV DS,AX ;装载数据段寄存器 MOV AX,EXDA MOV ES,AX ;装载附加数据段寄存器 MOV SI,OFFSET MSR ;设置SI MOV DI,OFFSET MSD ;设置DI MOV CX,LEN NEXT:MOV AL,[SI] ;开始传输数据 MOV ES:[DI],AL INC SI INC DI DEC CX JNZ NEXT PUSH ES POP DS ;将附加段寄存器指向的段值赋给数据段寄存器 MOV DX,OFFSET MSD
INT 21H MOV AX,4C00H ;利用DOS功能调用返回DOS状态 INT 21H CODE ENDS END START 将程序主体部分的寄存器间接寻址方式改为相对寻址方式,则如下所示: MOV BX,0 MOV CX,LEN NEXT: MOV AL,MSR[BX] MOV ES:MSD[BX],AL INC BX LOOP NEXT 实验步骤 (1) 运行Tdpit软件,选择文件菜单,点击新建进行实验程序的编写。 (2) 使用编译菜单中的编译和连接对实验程序进行汇编、连接。 (3) 使用编译菜单中的运行,运行程序,观察运行结果。 (4) 使用编译菜单中的调试,调试程序,观察调试过程中,数据传输指令执行后,各寄存器及数据区的内容。 (5) 更改数据区中的数据,考察程序的正确性。