第三章 连杆的基本设计
3.1 连杆结构及长度的确定
单列式汽油机的连杆,根据大头的结构一般可分为平切口、斜切口连杆及分体式连杆。多列式柴油机的连杆有并列连杆、叉形连杆、主副连杆等类型。
连杆的长短直接影响到柴油机的高度及侧压力的大小,较长的连杆能使惯性力增加,而同时在侧压力方面的改善却不明显。因此在柴油机设计时,当运动件不与有关零部件相碰时,都力求缩短连杆的长度。
连杆长度L (即连杆大小头孔中心距)与结构参数l R
=λ(R 为曲柄半径)有关。连杆
长度越短,即λ越大,则可降低发动机高度,减轻运动件重量和整机重量,对高速化有利,但λ大,使二级往复惯性力及气缸侧压力增大,并增加曲轴平衡块与活塞、气缸相碰的可能性。
在现代高速内燃机中,连杆长度的下限大约是l=3.2,即λ=1/3.2,上限大约是l=4R 。连杆长度的确定必须与所设计的内燃机整体相适应,连杆设计完成后应进行零件之间的防碰撞校核,应校核当连杆在最大摆角位置上时是否与气缸套的下缘相碰,以及当活塞在下止点附近位置上时活塞下缘是否与平衡重相碰,它们之间的最小距离都不应小于2~5毫米[]4。 在机体的设计中,已经根据要求设计出连杆长度为
168mm 。
3.2连杆小头的设计
3.2.1 小头结构型式
现代内燃机绝大多数采用浮式活塞销,也就是说,
在运转过程中活塞的销座中和在连杆的小头中都 是能够自由转动的。
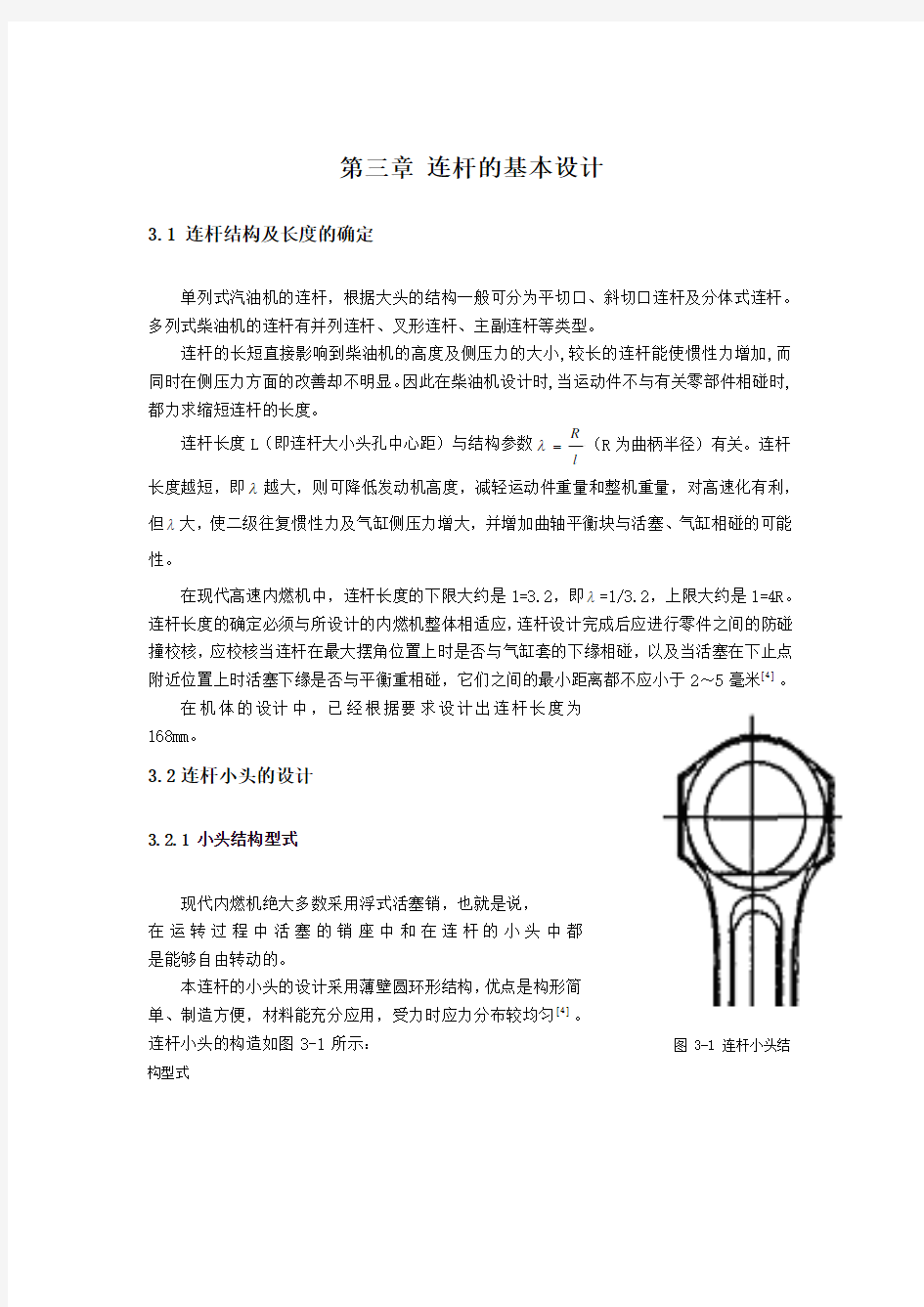
本连杆的小头的设计采用薄壁圆环形结构,优点是构形简
单、制造方便,材料能充分应用,受力时应力分布较均匀[]4
。 连杆小头的构造如图3-1所示: 图 3-1 连杆小头结构型式
3.2.2 小头结构尺寸
小头主要尺寸为连杆衬套内径d 和小头宽度b 1(通常小头和衬套制成同样的宽度)。b 1取决于活塞销座间隔b 。
连杆小头主要尺寸比例范围大致如下:
D=(0.28~0.42)D
δ=(04~0.08)d
d 1=(0.9~1.2)d
d 2=(1.2~1.4)d 1
根据《内燃机设计》要求[]1,初步设计连杆小头的主要尺寸为:
连杆小头衬套内径 d=25mm,
小头衬套厚度 δ=3mm 宽度同小头同宽
小头孔径 d 1=28mm
小头外径 d 2=34mm
小头宽度 b 1=30mm
小头油孔直径 d 0=3mm
3.2.3 连杆衬套
衬套与连杆小头孔为过盈配合,青铜衬套与活塞销的配合间隙?大致在(0.0004~0.0015)d 的范围内,在采用粉末冶金衬套时,由于衬套压入后,内径会缩小,因此配合间隙应适当放大,一般?大致在(0.0015~0.0020)d 。在四冲程柴油机中,为减少小头轴承的冲击负荷,间隙应尽量取小些,以不发生咬合为原则[]4
。 在小头上方开有集油孔或集油槽,靠曲轴箱中飞溅的油雾进行润滑。润滑油的均匀分布可通过衬套上开布油槽来达到。
设计衬套宽度与连杆小头等宽,厚度为3mm ,选用铅青铜材料。
3.3 连杆杆身
连杆杆身的截形十分重要,它应能在保证强度的前提下有尽量较轻的重量,此外,还要有利于该截面形状向大端、小端的过渡,因此柴油机连杆杆身常采用工字形截面。连杆杆身采用工字形截面,其长轴位于连杆摆动平面,这种截面对材料利用得最为合理。
连杆杆身截面的高H 一般大约是截面宽度的1.5~1.8倍,而B 大约等于(0.26~0.3)D(D 为气缸直径)。为了使杆身能与小头和大头圆滑过渡,杆身截面是由上向下逐渐增大的。杆身的最小截面积与活塞面积之比,对于钢制连杆来说大约是在1
1
2530 的范围内[]4。
根据《柴油机设计手册》要求,本连杆设计的杆身尺寸为:
杆身高度H=25mm
杆身宽度B=12mm
3.4 连杆大头
3.4.1 大头结构型式
连杆大头为了与曲轴相配,都用剖分式结构。从结构简单、对称和刚度、强度出发,连杆体与连杆盖的剖分面一般均垂直连杆轴线,称为平切口连杆。不过,从内燃机装拆方便性出发,要求连杆大头在拆卸连杆盖后应能通过所缸孔,即B
图 3-2 平切 口连 杆的 基本 型式 在 本 设 计 中 的某船艇用柴油机中,由于曲柄销的直径D 2=58mm,缸径D=92mm, D D 2=0.63<0.65,所以采 用平切口连杆。 3.4.2 大头尺寸 大端孔径主要取决于曲柄销直径及连杆轴瓦厚度,根据《内燃机设计》要求[]1,本连杆设计的大头主要尺寸为: 连杆大头轴瓦厚度 δ=2mm, 大头孔径 D 1=58+2×2=62mm 大头宽度 b 2=36mm 螺栓矩 L 1=(1.20~1.30)D 1 取 L 1=76=1.222D 1 螺栓孔外侧边厚不小于(2~4)mm 取螺栓孔外侧边厚4mm 连杆大头高度 H 1=H 2=0.50D 1=29mm 3.4.3 大头定位方式 平切口连杆采用螺栓定位方式,可防止连杆体和连杆盖安装错位,连杆螺栓不承受剪切作用。 本设计所采用的连杆是M10类型。 3.5 过渡区 连杆的过渡区域需要较大的过渡半径。连杆小端工作时,下半部主要承受燃气的爆发压力,而上半部则承受着活塞组的往复惯性力,所以连杆小端到杆身的过渡结构对小端的强度有很大的影响,其切点处常常是应力高峰值的所在地,因此小端和大端与杆身连接处采用大圆弧过渡,一方面提高小端与大端的刚度,另一方面也减少了这些地方的应力集中。 3.6连杆螺栓的设计 连杆上的螺栓数目是2,根据汽缸直径D 粗算螺栓螺杆的螺纹直径M d 根据统计 D d M )12.01.0(-=,取mm D d M 12.1011.0==,根究国家标准,选用M10的标准六角螺 栓。 连杆螺栓一般用45Mn2、40Cr 、35CrMoVA 、18CrNiWA ,螺母用35、45、40Cr 、40MnB 等。本连杆螺栓采用40Cr 制造,螺母采40MnB 制造。具有良好的抗拉强度和硬度。 3.7 本章小结 本章内容是本论文的关键部分,概据已知的BJ492QA 型汽油机性能特点,严格按照《内燃机设计》(杨连生版),进行该汽油机连杆的设计,选定了连杆的结构型式、大小头及杆身的结构和尺寸,以及润滑方式、定位方式等,是以下几章三维建模和计算校核的基础。 第八章平面连杆机构及其设计 一、填空题: 1.平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 2.在铰链四杆机构中,运动副全部是低副。 3.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 4.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 5.在铰链四杆机构中,与连架杆相连的构件称为连杆。 6.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 7.对心曲柄滑块机构无急回特性。 8.平行四边形机构的极位夹角θ=00,行程速比系数K= 1 。 9.对于原动件作匀速定轴转动,从动件相对机架作往复直线运动的连杆机构,是否有急回 特性,取决于机构的极位夹角是否为零。 10.机构处于死点时,其传动角等于0?。 11.在摆动导杆机构中,若以曲柄为原动件,该机构的压力角α=00。 12.曲柄滑块机构,当以滑块为原动件时,可能存在死点。 13.组成平面连杆机构至少需要 4 个构件。 二、判断题: 14.平面连杆机构中,至少有一个连杆。(√) 15.在曲柄滑块机构中,只要以滑块为原动件,机构必然存在死点。(√) 16.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 17.有死点的机构不能产生运动。(×) 18.曲柄摇杆机构中,曲柄为最短杆。(√) 19.双曲柄机构中,曲柄一定是最短杆。(×) 20.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 21.在摆动导杆机构中,若以曲柄为原动件,则机构的极位夹角与导杆的最大摆角相等。 (√) 22.机构运转时,压力角是变化的。(√) 三、选择题: 23.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A ≤ B ≥ C > 24.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而 充分条件是取 A 为机架。 A 最短杆或最短杆相邻边 B 最长杆 C 最短杆的对边。 25.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时, 有两个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 26.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 A 为机架时, 有一个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 27.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 C 为机架时, 无曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 28.铰链四杆机构中,若最短杆与最长杆长度之和 B 其余两杆长度之和,就一定是双摇杆 机构。 A < B > C = 29.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 C 为原动件时,此时机构处在死点位 置。 A 曲柄 B 连杆 C 摇杆 30.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 A 为原动件时,此时为机构的极限 位置。 A 曲柄 B 连杆 C 摇杆 31.对曲柄摇杆机构,当以曲柄为原动件且极位夹角θ B 时,机构就具有急回特性。 A <0 B >0 C =0 32.对曲柄摇杆机构,当以曲柄为原动件且行程速度变化系数K B 时,机构就具有急 回特性。 A <1 B >1 C =1 33.在死点位置时,机构的压力角α= C 。 A 0 o B 45o C 90o 34.若以 B 为目的,死点位置是一个缺陷,应设法通过。 A 夹紧和增力B传动 35.若以 A 为目的,则机构的死点位置可以加以利用。 A 夹紧和增力;B传动。 大作业(一) 平面连杆机构的运动分析 (题号:4-B) 班级:机制096 学号:2009012369 姓名:刘希富 同组其他人员:________________________ 完成日期:________________________ 平面连杆机构的运动分析题目 试用计算机完成下列平面连杆机构的运动分析。 1.图a 所示的为一平面六杆机构。假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及E 点的位移、速度和加速度的变化情况。 a ) 表1 平面六杆机构的尺寸参数(单位:mm ) mm l 0.652=',mm x G 5.153=,mm y G 7.41= 二、平面连杆机构的运动分析方程 1)位置分析 建立封闭矢量多边形 l 1+l 2=l 4+l 3; l 1+l 2 + l 2’=AG +l 5 +l 6; (式1) 将机构的封闭矢量方程式(1)写成在两坐标上的投影式,并改写成方程左边仅含未知量项的形式,即得 (式2)由于牛顿迭代法不便于限制l5,l6的位置。故在计算式采用复数矢量法直接求的。 求,; (1)(2)消去θ2得 经整理后并可简化为 式中: 解之可得 实际运动中0<θ3<180,故‘ +-’适当选择; 求θ5,θ6 : 先有 则 2)角速度分析 E点速度 ;3)角加速度分析 ; E点加速度 采用高斯消去法求角速度,角加速度; 三、程序流程图 源程序;#include Harbin Institute of Technology 机械原理大作业一 课程名称: 机械原理 设计题目: 连杆机构运动分析 院 系: 机电工程学院 班 级: 设 计 者: 学 号: 指导教师: 设计时间: 1.运动分析题目 (11)在图所示的六杆机构中,已知: AB l =150mm, AC l =550mm, BD l =80mm, DE l =500mm,曲柄以等角速度1w =10rad/s 沿逆时针方向回转,求构件3的角速度、角加速度和构件5的位移、速度、加速度。 2.机构的结构分析 建立以点A 为原点的固定平面直角坐标系A-x, y,如下图: 机构结构分析 该机构由Ⅰ级杆组RR (原动件1)、Ⅱ级杆组RPR (杆2及滑块3)和Ⅱ级杆组RRP (杆4及滑块5)组成。 3.建立组成机构的各基本杆组的运动分析数学模型 原动件1(Ⅰ级杆组RR ) 由图所示,原动件杆1的转角a=0-360°,角速度1w =10rad/s ,角加速度1a =0,运动副A 的位置坐标A x =A y =0,速度 (A, A),加速度 (A , A ), 原动件1的长度AB l =150mm 。 求出运动副B 的位置坐标(B x , B y )、速度 (B ,B)和加速度 (B , B)。 杆2、滑块3杆组(RPR Ⅱ级杆组) 已出运动副B 的位置(B x , B y )、速度 (B ,B ) 和加速度 (B , B ), 已知运动副C 的位置坐标C x =0, C y =550mm,速度,加速度,杆长AC l =550mm 。 求出构件2的转角b,角速度2w 和角加速度2a . 构件二上点D 的运动 大作业1 连杆机构运动分析 1、运动分析题目 如图所示机构,已知机构各构件的尺寸为280mm AB =,350mm BC =,320mm CD =,160mm AD =,175mm BE = 220mm EF =,25mm G x =,80mm G y =,构件1的角速度为110rad/s ω=,试求构件2上点F 的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。 2、建立坐标系 建立以点A 为原点的固定平面直角坐标系 图1 3、对机构进行结构分析 该机构由I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组RPR(滑块4及杆5)组成。I级杆组RR,如图2所示;II级杆组RRR,如图3所示;II级杆组RPR,如图4所示。 图2 图 3 图 4 4、各基本杆组运动分析的数学模型 (1)同一构件上点的运动分析: 图 5 如图5所示的构件AB,,已知杆AB 的角速度=10/rad s ,AB 杆长 i l =280mm,可求得B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。 =cos =280cos B i x l ??; =sin =280sin B i y l ??; = =-sin =-B xB i B dx v l y dt ω?ω; ==cos =;B yB i B dy v l x dt ω?ω 222B 2==-cos =-B xB i d x a l x dt ω?ω; 2222==-sin =-B yB i B d y a l y dt ω?ω。 (2)RRRII 级杆组的运动分析: 图 6 如图6所示是由三个回转副和两个构件组成的II 级组。已知两杆 的杆长2l 、3l 和两个外运动副B 、D 的位置(B x 、B y 、D x 、D y )、速度(xB yB xD yD v v v v 、、、)和加速度(xB yB xD yD a a a a 、、、)。求内运动副C 的位置(C C x 、y )、速度(xC yC v 、v )、加速度(xC yC a 、a )以及两杆 机械原理课程作业(一) 平面连杆机构的运动分析 (题号:1-A ) 班级 03021101 学号 姓名 成绩 同组者 完成日期 2014年1月1日 目录 一.题目及原始数据 (3) 二.平面连杆机构运动分析方程 (4) 三.计算程序框图 (6) 四.计算源程序 (7) 五.计算结果 (13) 六.运动线图分析 (17) 七.运动线图分析 (19) 八.体会及建议 (20) 九.参考书目 (20) 一. 题目及原始数据 1.如图1所示平面六杆机构,试用计算机完成其运动分析。 图1 设已知各构件的尺寸如表1所示,又已知原动件1以等角速度沿逆时针方向回转,试求各从动件的角位移、角速度、角加速度以及E 点的位移、速度、加速度的变化情况。已知其尺寸参数如下表所示: 表1 平面六杆机构尺寸参数 () mm 2、题目要求与成员组成及分工: (1)题目要求: 三人一组计算出原动件从0到360时(计算点数N=37)所要求的各运动变量的大小,并绘出运动曲线图及轨迹曲线,本组选取题号为:1—A ,1—B,1-C 组。 (2)分工比例: 学号 姓名 分工 2011300652 张正栋 报告书写,制图、程序 2011300620 肖川 制图 2011300622 尹志成 方程推导 组号 1l l 2 l 3 l 4 l 5 l 6 α A B C 2-A 2-B 3-C 26.5 67.5 87.5 52.4 43 600 l 2=116.6 l 2=111.6 l 2=126.6 二. 平面连杆机构运动分析方程 1. 位置方程 在图1的直角坐标系中,建立该六杆机构的封闭矢量方程: 将上式写成在两坐标轴上的投影式,并改写成方程左边尽含未知量的形式,即得 1122334112233' 1122226655'1122226655 cos cos cos sin sin sin cos cos cos()cos cos sin sin sin()sin sin G G L L L L L L L L L L x L L L L L y L L θθθθθθθθπαθθθθθπαθθθ??+?=?+? ?+?=?? ??+?-?-+=-?-????+?-?-+=-?-??将上式化简可得: 2233411223311' 222255664'22225566cos cos cos sin sin sin cos cos()cos cos sin sin()sin sin G G L L L L L L L L L L L x L L L L L y θθθθθθθθαθθθθαθθ??-?=-?? ?-?=-?? ??+?-+?+?=-???+?-+?+?=? 由以上各式即可得。 2. 速度方程 根据A ω=ω1B ,可得 222333111222333111'2222 22555666'222222555666sin sin sin cos cos cos sin sin()sin sin 0cos cos()cos cos 0L L L L L L L L L L L L L L θωθωθωθωθωθωθωθαωθωθωθωθαωθωθω?-??+??=??? ??-??=-??? ?-??-?-?-??-??=????+?-?+??+??=?化为矩阵形式为: 2233 22233 3'2 22255 665'2222 55 666111111111sin sin 00 cos cos 00sin()sin 0sin sin cos()cos 0 cos cos sin cos sin cos L L L L L L L L L L L L L L L L θθωθθωθαθ θθωθαθθθωθθωθθ?? ?? -??? ????-?? ????????-?--?-?-??????????-+????? ?????-??=????-????? ?? ??? 3. 加速度方程 机械原理大作业(一) 作业名称:连杆机构运动分析 设计题目: 20 院系:英才学院 班级: XXXXXXX 设计者:邵广斌 学号: XXXXXXXXXX 指导教师:林琳 设计时间: 2013年05月19日 哈尔滨工业大学机械设计 1.运动分析题目 如图所示机构,已知机构各构件的尺寸为150AB mm =,97β=?,400BC mm =, 300CD mm =,320AD mm =,100BE mm =,230EF mm =,400FG mm =,构件1的角速 度为110/rad s ω=,试求构件2上点F 的轨迹及构件5上点G 的位移、速度和加速度,并对计算结果进行分析。 2. 机构分析 该机构由原动件AB (Ⅰ级杆组)、BCD (RRR Ⅱ级杆组)和FG (RRP Ⅱ级杆组)组成。 3. 建立坐标系 如图3,建立以定点A 为原点的平面直角坐标系A-xy 。 图1 运动机构结构图 4. 运动分析数学模型 4.1 原动件AB 原动件AB 的转角: 10~2ψπ= 原动件AB 的角速度: 110/rad s ω= 原动件AB 的角加速度: 10α= 运动副A 的位置坐标: 0A x = 0A y = 运动副A 的速度: 0xA v = 0yA v = 运动副A 的加速度: 0xA a = 0yA a = 原动件AB 长度: 150AB l mm = 运动副B 的位置坐标: 1B A AB x x l cos ψ=+ 1B A AB y x l sin ψ=+ 运动副B 的速度: 11 xB xA AB v v l sin ωψ=- 11 yB yA AB v v l cos ωψ=+ 运动副B 的加速度: 2 1111 xB xA AB AB a a l cos l sin ωψαψ=-- 21111yB yA AB AB a a l sin l cos ωψαψ=-+ 一、填空题: 1.平面连杆机构是由一些刚性构件用低副连接组成的。 2.由四个构件通过低副联接而成的机构成为四杆机构。 3.在铰链四杆机构中,运动副全部是转动副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6.在铰链四杆机构中,与连架杆相连的构件称为连杆。 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8.对心曲柄滑快机构无急回特性。9.偏置曲柄滑快机构有急回特性。 10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于0。12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取滑块为原动件时,可能有死点。 14.机构处在死点时,其压力角等于90o。 15.平面连杆机构,至少需要4个构件。 二、判断题: 1.平面连杆机构中,至少有一个连杆。(√) 2.平面连杆机构中,最少需要三个构件。(×) 3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(√) 4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 5.有死点的机构不能产生运动。(×) 6.机构的压力角越大,传力越费劲,传动效率越低。(√) 7.曲柄摇杆机构中,曲柄为最短杆。(√) 8.双曲柄机构中,曲柄一定是最短杆。(×) 9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 10.平面连杆机构中,压力角的余角称为传动角。(√) 11.机构运转时,压力角是变化的。(√) 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A <=; B >=; C > 。 2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两 机械原理大作业一 课程名称:机械原理 设计题目:连杆机构及其分析 院系:机械设计制造及其自动化 班级:1208104 完成者:郑鹏伟 学号:1120810416 指导教师:林琳刘福利 设计时间:2014.6.3 哈尔滨工业大学 一.运动分析题目 如图 1-14 所示的矿石破碎机,已知各构件尺寸为: A B B C C D B E E F l 100m m ,l 460m m ,l 250m m , l 460m m ,l m,======D D G G x 300m m ,y 500m m ,x 430m m ,y 210m m ,3 δ== = ==试求构件5的角位移、角 速度、和角加速度。 二.机构结构分析、组成机构的基本杆组划分 1.计算机构的自由度 L H F 3n 2p p 35271=?-?-=?-?= 2.建立直角坐标系 以D 为原点建立直角坐标系 :D(0,0) ,A(-300,500),G(-730,210) 3.对机构进行结构分析: 该机构由一个RR 杆组(原动件AB )和三个RRR 杆组(BCD 、BEC 、EFG )组成,各基本杆组运动分析数学模型见下图: 三.计算编程(VB ): Private f1(3600) As Double '1杆的转角 Private xB(3600) As Double 'B 点的 x 位移 Private yB(3600) As Double 'B 点的 y 位移 Private vxB(3600) As Double 'B 点的 x 速度 Private vyB(3600) As Double 'B 点的 y 速度 Private axB(3600) As Double 'B 点的 x 加速度 Private ayB(3600) As Double 'B 点的 y 加速度 Private xC(3600) As Double 'C 点的 x 位移 Private yC(3600) As Double 'C 点的 y 位移 Private vxC(3600) As Double 'C 点的 x 速度 Private vyC(3600) As Double 'C 点的 y 速度 Private axC(3600) As Double 'C 点的 x 加速度 Private ayC(3600) As Double 'C 点的 y 加速度 Private xE(3600) As Double 'E 点的 x 位移 Harbin Institute of Technology 机械原理设计说明书 课程名称:机械原理 设计题目:连杆机构运动分析 指导老师:陈明丁刚 班级: 设计者: 学号: 指导教师: 设计时间: 一、运动分析题目 如图1-6所示是曲柄滑块机构,各构件长度分别为a 、b ,偏距为e ,连杆BC 上一点到铰链B 的距离为l m ,试研究各构件长度a 、b 、l m 及偏距e 的变化对点m 的轨迹的影响规律。 二、机构结构分析及基本杆组划分 1.除去虚约束力和局部自由度,计算机构的自由度并确定原动件 本机构中无虚约束或局部自由度。机构各杆件都在同一平面运动,活动构件数n=3,P L =4,P H =0,则机构的自由度为:F=3n-2P L -P H =33-24-10=1。原动件为曲柄AB 。 2.拆分杆组 从远离原动件(即杆AB ,如图1)进行拆分,可得到由杆BC 和C 点处滑块组成的RRP Ⅱ级杆组(如图2),剩下的就是Ⅰ级机构杆AB 。 3.确定机构的级别 由上可知,机构为Ⅱ级机构 三、各基本杆组的运动分析数学模型 (1)原动件AB (Ⅰ级杆组) ????? 原动件AB 的转角为:i ?=0~2π;角速度为:s rad /101=ω 角加速度为:01=ε 假定运动副A 的位置坐标为:x A =0,y A =0 A 点与机架相连,即该点的速度和加速度都为0。原动件AB 长度为l i ,从而可求得运动副B 点的位置坐标: i ?cos l x x i A B +=,i i A B l y y ?sin += (2)杆BC 和C 点的滑块(RRP Ⅱ级杆组) RRP Ⅱ级杆组是由两个构件两个转动副及一个外移动副组成的。 已知两杆长为l i 和l j (l j 杆垂直于滑块导路),外回转副B 的参数,滑块导路方向角和计算位移时的参考点K 的位置和导路的运动参数,求内运动副C 的运动参数。 位置方程:内回转副C 的位置方程为: j j j K i i B C j j j K i i B C l s y l y y l s x l x x ??????cos sin sin sin cos cos ++=+=-+=+= 消去s 可得:j i j i l l A ??++=0a r c s i n 其中 j K B j K B y y x x A ??c o s )(s i n )(0---= 为保证机构的存在,应满足装配条件i j l l A ≤+0,求得 i ?后,可求得x C 和y C ,而后求得滑块的位移s : j j j K C j j j K C l y y l x x s ????sin /)cos (cos /)sin (--=+-= 滑块D 点的位移方程为: j K D j K D s y y s x x ??sin cos +=+= (3)求M 点位置坐标 要画出点m 的轨迹图,需要求出点m 的位置坐标。假定以A 点为原点,则点B 的位置坐标为: 1 1sin cos ααa y a x B B == 点C 的位置坐标为: e y b a x C C =+=21cos cos αα 而点m 是杆BC 上的一点,且到B 点的 距离为l m ,则B,C,m 三点满足关系:C B m B B C B m m y y y y x x x x b l --=--= 从而求得m 点的位置 1.建立封闭图形: → → → → +=+EC AE BC AB 1 → →→=+AD L L 21 2.机构运动分析: (1)角位移分析 由图形封闭性得: 321cos cos cos θθθEC X BC AB e +=+ 321sin sin sin θθθEC Y BC AB e +=+ d X CD BC AB =+-+)cos(cos cos 221βθθθ d Y CD BC AB =+-+)sin(sin sin 221βθθθ (2)角速度分析 对上式求时间的一阶导数,可得速度方程: 113322sin sin sin ωθωθωθAB EC BC =+- 113322cos cos cos ωθωθωθAB EC BC -=- 112222sin )sin(sin ωθωβθωθAB V CD BC dx =-++- 112222cos )cos(cos ωθωβθωθAB V CD BC dy -=-+- 化为矩阵形式得: ?????? ??? ???-=??? ?????????????????? ?? ??? -+---+--11111 3222223232cos sin cos sin 100) cos(cos 010sin )sin(00 cos cos 00 sin sin θθθθωωωβθθθβθθθθθAB V V CD BC BC CD EC BC EC BC dy dx (3)角加速度分析 (4)矩阵对时间求一阶导数,可得加速度矩阵 = ??? ?? ?? ?????????????? ?? ??? -+---+--dy dx a a CD BC BC CD EC BC EC BC 3222223232100)cos(cos 010sin )sin(00cos cos 00 sin sin εεβθθθβθθθθθ ? ????? ??? ???-+?????? ??????????????? ?? ??? ++--+--111121 2 2 2 3 2 2 22223232cos sin cos sin 000) sin(sin 000cos )cos(00sin sin 00cos cos θθθθωωωβθθθβθθθθθdy dx V V CD BC BC CD EC BC EC BC 3.拆分基本杆组 连杆机构的运动分析 一.题目 如图所示是曲柄摇杆机构,各构件长度分别为a,b,c,d,试研究各构件长度的变化对机构急回特性的影响规律。 二.机构分析 四连杆机构可分为如下两个基本杆组 Ⅰ级杆组 RRRⅡ级杆组 AB为曲柄,做周转运动;CD为摇杆,做摆动运动; BC为连杆;AB,CD均为连架杆,AB为主动件。 三.建立数学模型 θ为极位夹角,φ为最大摆角 必须满足条件为:1.a≤b,a≤c,a≤d(a为最短杆); 2.L min+L max≤其他两杆之和。 下面分析杆长和极位夹角的关系: 在△AC2B中, =; 在△AC1B中, =。 θ=- K= 最后分以下四种情况讨论: 1.机架长度d变化 令a=5,b=30,c=29 d由6开始变化至54,步长为1 输出杆长a,b,c,d和K。 2.连杆长度b变化 令a=5,b=29,d=30 b由6开始变化至54,步长为1 输出杆长a,b,c,d和K。 3.摇杆长度c变化 令a=5,b=29,d=30 c由6开始变化至54,步长为1 输出杆长a,b,c,d和K。 4.曲柄长度a变化 令b=29,c=28,d=30 a由5开始变化至27,步长为1 输出杆长a,b,c,d和K。 四.MATLAB计算编程a=5;b=30;c=29; d=6:1:54; m=(d.^2-216)./(50.*d); n=(384+d.^2)./(70.*d); p=acos(m); q=acos(n); w=p-q; o=(w.*180)/3.14; K=(180+o)./(180-o); fprintf('%.6f\n',K); plot(d,K,'b') xlabel('机架长度d变化时 '); ylabel('极位夹角/度'); tilte('极位夹角变化图'); ———————————————————————————————————— ——— a=5;d=30;c=29; b=6:1:54; m=((b-5).^2+59)./(60.*(b- 5)); n=(59+(b+5).^2)./(60.*(b+ 5)); p=acos(m); q=acos(n); w=p-q; o=(w.*180)/3.14; K=(180+o)./(180-o); fprintf('%.6f\n',K); plot(b,K,'b') xlabel('连杆长度b变化时'); ylabel('极位夹角/度'); tilte('极位夹角变化图'); 1、运动分析题目 如图1-18所示机构,已知机构各构件的尺寸为? = 90°,AB = 108mm,AD = 266mm,DG = 278mm,EF = FG = 114mm,BC = CE = CD = 200mm,构件1的角速度为w1 = 10rad/s,试求构件2上的E的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。 图1-18 2、建立坐标系 以A点为坐标原点,杆AD所在的直线为X轴,垂直于AD的直线为Y轴,建立直角坐标系,如下图2所示: 图2 3、对机构进行结构分析 该机构由1个I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组RRR(杆4、杆5)组成。 4、各基本杆组的运动分析数学模型 (1)原动件杆1(Ⅰ级杆组RR) 如图3所示 图3 Ⅰ级杆组RR 已知原动件杆1 的转角φ = 0~360°,角速度ω1 = 10rad/s,角加速度α1 = 0 转动副A 的位置坐标X A=0,Y A=0;速度X A’= 0,Y A’= 0;加速度X A”= 0,Y A”= 0 原动件杆1 的 长度L AB = 100mm, 可求转动副B 的位置坐标(X B,Y B),速度(X B’, Y B’)和角加速度(X B”, Y B”); (2)杆2 和杆3(Ⅱ级杆组RRR) 如图4所示: 图4 Ⅱ级杆组RRR 由于BC = CE = CD = 200mm,所以,可以根据几何关系求出杆2与X轴之间的夹角Ψ,B 的位置坐标(X B,Y B);速度(X B’,Y B’);角加速度(X B’’,Y B’’)杆2 的长度L BE = 400mm,杆3的长度为L CD = 200mm。 可求点E的位置坐标(X E,Y E),速度(X E’,Y E’)和角加速度(X E’’,Y E’’);(3)杆4 和杆5(Ⅱ级杆组RRR) 如图5所示 图5 Ⅱ级杆组RRR 已知点E的位置坐标(X E,Y E),速度(X E’,Y E’)和角加速度(X E’’,Y E’’),EF = FG = 114mm,G点的坐标为(-266,278);速度X G’=0,Y G’=0;加速度X G’’=0,Y G’’=0,可求杆5 的角位移θ,角速度ω 及角加速度α。 5、计算编程 H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械原理大作业一 课程名称:机械原理 设计题目:连杆机构运动分析 院系:能源学院 班级: 1302402 设计者:黄建青 学号: 1130240222 指导教师:焦映厚陈照波 设计时间: 2015年06月24日 求解步骤如下: 1. 建立坐标系 建立以点A 为原点的固定平面直角坐标系xAy 。 2. 机构的结构分析,基本干组的划分 该机构由I 级杆组RR (原动件AB )、II 级杆组RRP (杆2,3)、II 级杆组RRP (杆4,5)。如下图所示。 3. 建立各基本杆组的运动分析的数学模型 计算流程框图如下: 3.1 I 级杆组RR (原动件AB ) 设原动件杆1的转角为φ,则 角速度 s rad /101==ω? & 角加速度 0==ε?&& 支座A 的位置坐标为 0,y 0A A x == 速度为 0,0==A A y x && 加速度为 0,0==A A y x &&&& 原动件杆1的长度 m m 100=AB l 所以,运动副B 的位置、速度和加速度分析如下: 位置 i AB A B l x x ?cos += i AB A B l y y ?sin += 速度 i AB Ax Bx l v v ?ωsin -= i AB yA yB l v v ?ωcos += 加速度分析 i AB i AB Ax Bx l l a a ?ε?ωsin cos 2--= i AB i AB Ay By l l a a ?ε?ωcos sin 2+-= 3.2 II 级杆组RRP (杆2、3) 杆长200BC l mm =,设点C 位移为s 则 c 0x = c -200*cos arcsin()200 B j B j y y x ??== C 点位移 y 200*cosarcsin()200 B c B x s y ==- 速度 c c v y =g 加速度 c c a y =g g 机械原理大作业一连杆机构参考例子 ————————————————————————————————作者:————————————————————————————————日期: 1 机械原理大作业 课程名称:机械原理 设计题目:机械原理大作业 院系:汽车工程学院车辆工程班级:1101201 姓名:。。。。 学号:。。。。。。。 指导教师:游斌弟 1 1 大作业1 连杆机构运动分析 1、运动分析题目 如图所示机构,已知机构各构件的尺寸为 280mm AB =,350mm BC =,320mm CD =,160mm AD =,175mm BE = 220mm EF =,25mm G x =,80mm G y =,构件1的角速度为110rad/s ω=,试求构件2上点F 的轨迹及构件5的角位移、角速度和角加 速度,并对计算结果进行分析。 图 1 2、对机构进行结构分析 该机构由I 级杆组RR (原动件1)、II 级杆组RRR (杆2、杆3)和II 级杆组RPR (滑块4及杆5)组成。I 级杆组RR ,如图2所示;II 级杆组RRR ,如图3所示;II 级杆组RPR ,如图4所示。 1 图2 图 3 图4 3、建立坐标系 建立以点A 为原点的固定平面直角坐标系 1 4、各基本杆组运动分析的数学模型 (1)同一构件上点的运动分析: 如图5所示的构件AB,,已知杆AB 的角速度=10/rad s ω,AB 杆长 i l =280mm,可求得B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。 =cos =280cos B i x l ??; =sin =280sin B i y l ?? ; 图 5 = =-sin =-B xB i B dx v l y dt ω?ω; ==cos =;B yB i B dy v l x dt ω?ω 222B 2==-cos =-B xB i d x a l x dt ω?ω; 2222==-sin =-B yB i B d y a l y dt ω?ω。 图 6 (2)RRRII 级杆组的运动分析 如图6所示是由三个回转副和两个构件组成的II 级组。已知两杆的杆长2l 、3l 和两个外运动副B 、D 的位置(B x 、B y 、D x 、D y )、速度( xB yB xD yD v v v v 、、、 ) 图6 和加速度(xB yB xD yD a a a a 、、、)。求内运动副C 的位置(C C x 、y )、速度 1.运动分析题目 如图所示机构,已知机构各构件的尺寸为AB=170mm,β=90°,AC=110mm,CD=200mm,CE=200mm,CE=320mm,EF=650mm,FG=500mm,h=380mm。构件1的角速度ω1=10rad/s,试求构件7上点G的位移,速度和加速度,并对结果进行分析。 2.连杆机构运动分析 (1)建立以点A为原点的固定平面直角坐标系A-X-Y,如图所示。 (2)对机构进行结构分析。该机构由原动件AB(Ⅰ级杆组) BCD(RPRⅡ级杆组) DEF(RPRⅡ级杆组) FG(RRPⅡ级杆组) (3)各基本杆组的运动分析模型。 ①运动件AB(Ⅰ级杆组) 运动件AB的角速度: ω1=10rad/s; 原动件AB的角加速度: α1=0; 运动副A的速度: V XA=0,V YA=0; 运动副A的加速度: a XA=0,a YA=0; 原动件AB的长度: l AB=170mm; 可求出运动副B的位置坐标: x B=x A+l AB cosφ1, y B=y A+l AB sinφ1; 运动副B的速度: v XB=v XA-ω1l AB sinφ1,v YB=v YA+l AB cosφ1; 运动副B的加速度: a XB=a XA-ω12l AB cosφ1-α1l AB sinφ1, a YB=a YA-ω12l AB sinφ1+α1l AB cosφ1; ②BCD(RPRⅡ级杆组) 由①知B点的位置坐标,速度,加速度。运动副C点的位置坐标: x C=-110mm,y C=0; 运动副D的速度: v XC=0,v YC=0; 运动副D的加速度: a XC=0,a YC=0; Φ2=arctan((y B-y C)/(x B-x C)); Φ3=φ2+90°; 运动副D的位置坐标: x D=x C+l CD cosφ3, y D=y C+l CD sinφ3; 求导数得出运动副D的速度和加速度 v XD,v YD,a XD,a YD; ③DEF(RPRⅡ级杆组) 由②知点D的位置坐标,速度,加速度;运动副E点的位置坐标: x E=-110mmm,y E=-320mm; 运动副E点的速度: v XE=0,v YE=0; 运动副E点的加速度: a XE=0,a YE=0; Φ4=arctan((x E-x D)/(y D-y E)); 运动副F的位置坐标: x F=x E-l EF sinΦ4; y F=y E+l EF cosφ4; 求导可求运动副F的速度,加速度 v XF,v YF,a XF,a YF; ④FG(RRPⅡ级杆组) Φ5=arcsin((h-y F)/l FG); 运动副G的位置坐标: x G=x F+l FG cosΦ5; y G=y F+l FG sinΦ5; 求导可得运动副G的速度,加速度 v XG,v YG,a XG,a YG; (4)程序编写 以下程序用MATLAB编写: lAB=170; lAC=110; lCD=200; 机械原理作业设计说明书 课程名称:机械原理 设计题目:连杆机构运动分析 院系: 班级: 设计者: 学号: 设计时间: 连杆机构运动分析 题目:如图1-1所示机构,已知机构各构件的尺寸为AB=100mm , BC=2.73AB ,CD=1.36AB ,CG=2.32AB ,BG=4.9AB ,AF=2.36AB ,AD=2.87AB ,DF=2AB ,GE=1.45AB ,EF=2.82AB ,GM=1.36AB ,MK=1.91AB ,KD=0.54AB ,KF=2.18AB ,HF=3.1AB ,DH=3.63AB ,o 135=β, 构件1的角速度为s /rad 101=ω。试求构件2上G 点的轨迹及构件4、构件6和构件8的角位移、角速度和角加速度,并对计算结果进行分析。 H G M E C F K D B A X Y 图1 解: 1、建立坐标系 建立以点H为原点的固定平面直角坐标系D-x,y,如图1所示。 1.对机构进行结构分析 该机构由I级杆组RR(原动件AB)、II级杆组RRR(杆2、9)、II级杆组RRR(杆5、6)、II级杆组RRR(杆7、8)和II级杆组RPR (杆4、滑块3)组成。I级杆组RR(原动件AB)如图2所示,II 级杆组RRR(杆2、9)如图3所示,II级杆组RRR(杆5、6)如图5所示,II级杆组RRR(杆7、8)如图6所示,II级杆组RPR(杆4、滑块3)如图7所示。 图2 I级杆组RR 图3 II级杆组RRR 图5 II 级杆组RRR 图6 II 级杆组RRR 图7 II 级杆组RPR 2.各基本杆组运动分析 1. I 级杆组RR (原动件AB ) 如图2所示,已知原动件杆1的转角 ??=360-0? pi =δ 角速度 s rad /101==ω? 角加速度 0==ε? 运动副A 的位置坐标为 mm y mm x A A 5.41,3.542== 速度为 0,0==A A y x 机械原理大作业一 ——平面六杆机构的分析题目: 下图所示为一平面六杆机构。设已知各构件的尺寸如下表所示,又知原动件1以等角速度 ω1=1rad/s沿逆时针方向回转,试求各从动件的角位移、角速度及角加速度以及E 点的位移、速度及加速度的变化情况。 平面六杆机构的尺寸参数 =65.09mm,=153.5mm,=41.7mm 题号a 2—B26.5111.667.587.552.44360° 图 a) 1 机构运动分析 如上图a)所示,建立直角坐标系。建立三个封 闭图形ABCDA、DCEFGD和DGFED,由此可 得: 写成投影方程形式 可得E点位移: 分别将上式求一次、二次导数,写成矩阵形式,得到下面 的速度和加速度方程: E点的速度为: E点的加速度为: 2 matlab程序设计 2.1 程序流程图 .2 源程序: %创建函数myfun,函数fsolve通过它确定、、、。 function f=myfun(x,y) l1=26.5;l2=111.6;l3=67.5;l4=87.5;l5=52.4;l6=43;l21=65;xg=153 yg=41.7;a=pi/3; eq1=l1*sin(y)+l2*sin(x(1))-l3*sin(x(2)); eq2=l1*cos(y)+l2*cos(x(1))-l3*cos(x(2))-l4; eq3=l3*sin(x(2))+l21*sin(x(1)-a)-yg-l6*sin(x(4))- l5*sin(x(3)); eq4=l3*cos(x(2))+l21*cos(x(1)-a)-xg+l4-l6*cos(x(4))- l5*cos(x(3)); f=[eq1;eq2;eq3;eq4]; 主程序如下: %求解过程 l1=26.5;l2=111.6;l3=67.5;l4=87.5;l5=52.4;l6=43;l21=65;xg=153 yg=41.7;a=pi/3; %给定已知量 th1=[0:1/18:2]*pi; %曲柄输入角度th1从0到2*pi,步长为平面连杆机构及其设计答案复习进程
连杆机构大作业题目.
哈工大机械原理大作业连杆
机械原理大作业1连杆机构27题
机械原理大作业平面连杆机构
哈工大-机械原理大作业-连杆机构运动分析
平面连杆机构及其设计(参考答案)
机械原理大作业一-连杆传动机构分析
哈工大机械原理大作业——连杆——24号
机械原理大作业-连杆设计(32题)
机械原理大作业一
机械原理大作业1连杆机构(18题)
哈工大机械原理大作业连杆-黄建青
机械原理大作业一连杆机构参考例子
连杆机构大作业24
机械原理大作业1-连杆机构运动分析-30题
连杆机构大作业报告
相关主题
文本预览