题 目: 参数变化时系统的稳定性分析 初始条件:
反馈系统方框图如下图所示。K (s)D =1,s
K K (s)D I
+
=2,)6s )(2s (1s G 1+-+=
s (s),)
2s )(1s (1
G 2++=(s)
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要
求)
(1) 当D(s)=D 1(s),G(s)=G 1(s)时,确定使反馈系统保持稳定的比例增益K 的范围。
计算系统在单位阶跃信号输入作用下的稳态误差;
(2) 满足(1)的条件下,取三个不同的K 值(其中须包括临界K 值),计算不同
K 值下系统闭环特征根,特征根可用MATLAB 中的roots 命令求取; (3) 用Matlab 画出(2)中三个增益对应的单位阶跃输入的响应曲线,通过响应
曲线分析不同K 值时系统的动态性能指标;
(4) 当D(s)=D 2(s),G(s)=G 2(s)时,确定使系统稳定K 和K I 的范围,并画出稳定时
的允许区域。计算系统在单位阶跃信号输入作用下的稳态误差;
(5) 满足(4)的条件下,取三个不同的K 和K I 值,计算不同K 和K I 值下系统闭
环特征根,特征根可用MATLAB 中的roots 命令求取。画出其中一组值对应的波特图并计算相角裕度;
(6) 分析比例和积分控制作用对系统性能的影响;
(7) 用Matlab 画出(5)中三个增益对应的单位阶跃输入的响应曲线,通过响应
曲线分析不同K 和K I 值时系统的动态性能指标;
(8) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析计算的过
程,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处
Y
标准书写。
时间安排:
指导教师签名:年月日
系主任(或责任教师)签名:年月日
目录
摘要 (4)
1系统方框图分析 (5)
2当D(s)=D1(s),G(s)=G1(s)时 (6)
2.1 使系统稳定的K值范围和稳态误差 (6)
2.2 不同K值下的特征根 (6)
2.3不同K值下的动态性能指标 (7)
2.3.1 k=7.5(临界值) (7)
2.3.2 k=12 (8)
2.3.3 K=20 (9)
3当D(s)=D2(s),G(s)=G2(s)时 (10)
3.1 使系统稳定的K和Ki的范围及系统在阶跃输入下的稳态误差 (10)
3.2 不同K值下的特征根 (11)
3.3 不同K值和Ki值下的系统动态性能指标 (12)
k=3,k I=6 (13)
k=3,k I=12 (13)
k=15,k I=10 (14)
3.4 波特图与相角裕度 (15)
4比例和积分控制作用对系统性能的影响 (16)
总结............................................. 错误!未定义书签。参考文献......................................... 错误!未定义书签。本科生课程设计成绩评定表......................... 错误!未定义书签。
摘要
在《自动控制原理》的课程中,。本次课程设计中,利用所学知识,不仅完成了对给出系统的输入响应分析,稳定性分析,误差分析等,频域性能分析,还利用数学软件对系统进行了仿真。
关键词:自动控制原理MATLAB
参数变化时系统的稳定性分析 1系统方框图分析
系统开环传递函数为:
H(s)=D(s)G(s)
(1-1)
系统闭环传递函数为
()()
()1()()
D s G s s D s G s Φ=
+
(1-2)
稳态误差为
0()lim ()lim
1()()
ss s s sR s e sE s D s G s →→==+
(1-3)
系统的静态误差常数为
lim ()()p s K D s G s →=
(1-4)
2当D(s)=D1(s),G(s)=G1(s)时
2.1 使系统稳定的K 值范围和稳态误差
可得系统特征方程为:
325(6)10s s k s ++-+=
劳斯表:
321
1655(6)5s k s k
k k
s
s k
---
根据劳斯稳定判据,欲使系统稳定,表中第一列必须同号且为正。 故有:
k>0
且
5(6)05
k k
-->
得
k>7.5
系统为I 型,故单位阶跃响应误差为0。
2.2 不同K 值下的特征根
①取临界值K=7.5,利用MATLAB 中的ROOTS 命令:
p=[1 5 1.5 7.5] r=roots(p)
结果为:
r =
-5.0000 + 0.0000i 0.0000 + 1.2247i 0.0000 - 1.2247i
②取K=12,利用MATLAB 中的ROOTS 命令:
p=[1 5 6 12] r=roots(p)
结果为
r =
-4.2526 + 0.0000i -0.3737 + 1.6377i -0.3737 - 1.6377i
③取K=20,利用MATLAB 中的ROOTS 命令:
p=[1 5 14 20] r=roots(p)
结果为
r =
-1.2107 + 2.5081i -1.2107 - 2.5081i -2.5786 + 0.0000i
2.3不同K 值下的动态性能指标
单位阶跃响应,系统输出为
32(1)1
()*
5(6)k s Y s s s k s k s
+=
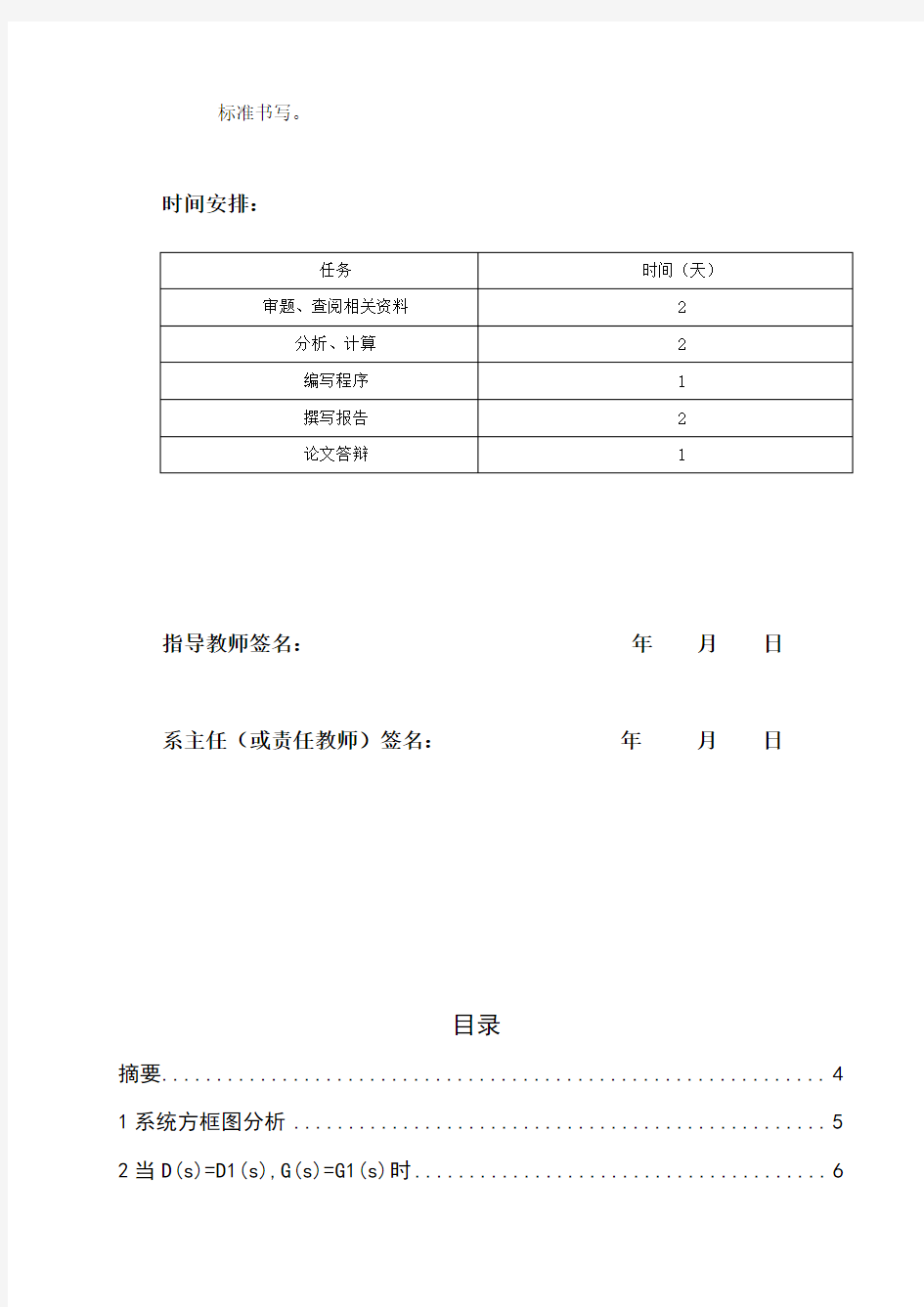
++-+ 2.3.1 k=7.5(临界值)
利用MATLAB 命令: k=7.5; num=[1 1];
den=[1 5 1.5 7.5];
step(k*num,den);
单位阶跃响应曲线如图:
图2-1 K=7.5时的单位阶跃响应曲线
2.3.2 k=12
利用MATLAB命令:
k=12;
num=[1 1];
den=[1 5 6 12];
step(k*num,den);
单位阶跃响应曲线和相应的动态指标如下:
图2-2 K=12时的单位阶跃响应曲线2.3.3 K=20
利用MATLAB命令:
k=20;
num=[1 1];
den=[1 5 14 20];
step(k*num,den);
单位阶跃响应曲线和相应的动态指标如下:
图2-3 K=20时的单位阶跃响应曲线
3当D(s)=D2(s),G(s)=G2(s)时
3.1 使系统稳定的K 和Ki 的范围及系统在阶跃输入下的稳态误差
系统的闭环传递函数为:
32()3(2)I
I
sk k s s s k s k +Φ=++++
特征方程为:
323(2)0I s s k s k ++++=
劳斯表为:
321
1223(2)2I
I
I
s k s k k k s
s k ++-
根据劳斯稳定判据,欲使系统稳定,表中第一列必须同号且为正。可得、
3K-Ki+6>0
且
Ki>0
稳定允许的区域为:
图有
23232
()()2(2)I
s s E s R s s s k s k ++=++++
当输入信号为单位阶跃信号时R(s)=1/s,系统的稳态误差为:
232001322
lim ()lim **2(2)ss s s I I
s s e sE s s s s s k s k k →→++===++++
3.2 不同K 值下的特征根
系统特征方程为323(2)0I s s k s k ++++= 当k=3,k I =6时
利用MATLAB 中的ROOTS 命令来求取:
p=[1 3 5 6]
r=roots(p)
结果为:
r =
-2.0000 + 0.0000i -0.5000 + 1.6583i -0.5000 - 1.6583i
当k=3,k I =12时
利用MATLAB 中的ROOTS 命令来求取:
p=[1 3 5 12] r=roots(p) r =
-2.7625 + 0.0000i -0.1188 + 2.0808i -0.1188 - 2.0808i
当k=15,k I =10时
利用MATLAB 中的ROOTS 命令来求取:
p=[1 3 17 10] r=roots(p) r =
-1.1770 + 3.7542i -1.1770 - 3.7542i -0.6460 + 0.0000i
3.3 不同K 值和Ki 值下的系统动态性能指标
输入为单位阶跃响应R(s)=1/s 时,系统的输出为:
321
()*3(2)I I sk k Y s s s k s k s
+=
++++
k=3,k I=6
利用MATLAB绘制
num=[12 3];
den=[1 3 14 3];
step(num,den);
相应的阶跃相应曲线和动态指标如下图所示:
=3时的单位阶跃响应曲线
图3-1 k=12,k
I
k=3,k I=12
利用MATLAB绘制
num=[3 12];
den=[1 3 5 12];
step(num,den);
相应的阶跃相应曲线和动态指标如下图所示:
=12时的单位阶跃响应曲线
图3-2 k=3,k
I
k=15,k I=10
利用MATLAB绘制
num=[15 10];
den=[1 3 17 10];
step(num,den);
相应的阶跃相应曲线和动态指标如下图所示:
图3-3 k=15,k
=10时的单位阶跃响应曲线
I
3.4 波特图与相角裕度
取第一组的K和Ki,使用MATLAB程序:
num=[12 3];
den=[1 3 14 3];
margin(num,den);
相角裕度为32.1°,如下图:
图3-4 波特图和相角裕度
4比例和积分控制作用对系统性能的影响
使用PI 控制时,相当于在系统中增加了一个位于原点的开环极点,同时增加了一个位于s 左半平面的开环零点。位于原点的极点可以提高系统型别,以消除或减小系统稳态误差,改善系统动态性能;而增加的负实零点则用来减小系统的阻尼程度。时间常数T 足够大的时候,其对系统的不利影响可大大减弱,主要用于改善控制系统的稳态性能。
下面用实例阐述PI 控制器的作用:
对于D(s)= D2(s),G(s)=G2(s)的情况,D2(s)实际上相当于PI 环节,若去除D2(s),得到系统开环传递函数为
)
2s )(1s (1
G 2++=
(s)
利用MATLAB 绘出相应曲线并获得动态性能指标:
图4-1 G2(s)的单位阶跃相应曲线和性能指标
加入D2(s),并使时间常数T 足够大,即令K>>Ki ,得到传递函数为
利用MATLAB绘出相应曲线并获得动态性能指标:
图4-1 G2(s)的单位阶跃相应曲线和性能指标
可得加入PI控制后,阻尼大大减小,响应的上升时间大幅减小。
边坡稳定性计算方法 目前的边坡的侧压力理论,得出的计算结果,显然与实际情形不符。边坡稳定性计算,有直线法和圆弧法,当然也有抛物线计算方法,这些不同的计算方法,都做了不同的假设条件。 当然这些先辈拿出这些计算方法之前,也曾经困惑,不做假设简化,基本无法计算。而根据各种假设条件,是会得出理论上的结果,但与实际情况又不符。倒是有些后人不管这些假设条件,直接应用其计算结果,把这些和实际不符的公式应用到现有的规范和理论中。 瑞典条分法,其中的一个假设条件破裂面为圆弧,另一个条件为假设的条间土之间,没有相互作用力,这样的话,对每一个土条在滑裂面上进行力学分解,然后求和叠加,最后选取系数最小的滑裂面。从而得出判断结果。其实,那两个假设条件对吗?都不对! 第一、土体的实际滑动破裂面,不是圆弧。第二、假设的条状土之间,会存在粘聚力与摩擦力。边坡的问题看似比较简单,只有少数的几个参数,但是,这几个参数之间,并不是线性相关。对于实际的边坡来讲,虽然用内摩擦角①和粘聚力C来表示,但对于不同的破裂面,破裂面上的作用力,摩擦力和粘聚力,都是破裂面的函数,并不能用线性的方法分别求解叠加,如果是那样,计算就简单多了。 边坡的破裂面不能用简单函数表达,但是,如果不对破裂面作假设,那又无从计算,直线和圆弧,是最简单的曲线,所以基于这两种曲线的假设,是计算的第一步,但由于这种假设与实际不符,结果肯定与实际相差甚远。
条分法的计算,是来源于微积分的数值计算方法,如果条间土之间,存在相互作用力,那对条状土的力学分解,又无法进行下去。 所以才有了圆弧破裂面的假设与忽略条间土的相互作用的假设。 其实先辈拿出这样与实际不符的理论,内心是充满着矛盾的。 实际看到的边坡的滑裂,大多是上部几乎是直线,下部是曲线形状,不能用简单函数表示,所以说,要放弃求解函数表达式的想法。计算还是可以用条分法,但要考虑到条间土的相互作用。 用微分迭代的方法求解,能够得出近似破裂面,如果每次迭代,都趋于收敛,那收敛的曲线,就是最终的破裂面。 参照图3,下面将介绍这种方法的求解步骤。
实验一--控制系统的稳定性分析
实验一控制系统的稳定性分 班级:光伏2班 姓名:王永强 学号:1200309067
实验一控制系统的稳定性分析 一、实验目的 1、研究高阶系统的稳定性,验证稳定判据的正确性; 2、了解系统增益变化对系统稳定性的影响;
3、观察系统结构和稳态误差之间的关系。 二、实验任务 1、稳定性分析 欲判断系统的稳定性,只要求出系统的闭环极点即可,而系统的闭环极点就是闭环传递函数的分母多项式的根,可以利用MATLAB中的tf2zp函数求出系统的零极点,或者利用root函数求分母多项式的根来确定系统的闭环极点,从而判断系统的稳定性。 (1)已知单位负反馈控制系统的开环传递 函数为 0.2( 2.5) () (0.5)(0.7)(3) s G s s s s s + = +++,用MATLAB编写 程序来判断闭环系统的稳定性,并绘制闭环系统的零极点图。 在MATLAB命令窗口写入程序代码如下:z=-2.5 p=[0,-0.5,-0.7,-3] k=1 Go=zpk(z,p,k)
Gc=feedback(Go,1) Gctf=tf(Gc) dc=Gctf.den dens=ploy2str(dc{1},'s') 运行结果如下: Gctf = s + 2.5 --------------------------------------- s^4 + 4.2 s^3 + 3.95 s^2 + 2.05 s + 2.5 Continuous-time transfer function. dens是系统的特征多项式,接着输入如下MATLAB程序代码: den=[1,4.2,3.95,1.25,0.5] p=roots(den)
图形工作站计算机配置配套设备 序号名称品牌及型号单位数量 1 稳压器大功率、无触点60KV(三相)(深*宽*高 650*430*950) 台 1 2 功放 SNAK KB6688 具有高低音、话筒音量、总音量调节、双通道接收、 二路话筒输入、功率≥2*80W/8欧 个 1 3 音箱SNAK B601 功率≥80W/8欧个 2 4 无线话筒SNAK 218 包括U段无线话筒领夹个 1 5 有线话筒三鹰会议话筒个 2 6 学生桌子 桌子台面和立板用25MM灰板,机箱后面有门加锁,并带有 250*500MM的孔,用带通风孔的钢板盖住,立板有过线孔。其余 板用16MM灰板桌子材质必须是环保型的亚光浅灰三聚氰胺高密 度板1400㎜*600㎜*800㎜(长*宽*高)学生双人、机器压边(要 求在12小时内全封闭不通风的情况下不得有甲醛等的刺鼻异味 等散发,否则验收视为不合格产品)电脑所用的连接线均走暗格, 严格按照学校要求定制。看附件(图和数据只做参考) 张30 7 教师桌1400㎜*600㎜*800㎜其他同学生桌,但要按学校定制张 2 8 方凳340㎜*230㎜*460㎜(长*宽*高)四柱为铁张63 9 防静电地板 双旗元钢防静电地板防火贴面/钢板0.6mm/厚壁方钢60*60(根 据实际使用量结算) 平方130 图形工作站计算机配置综合布线
局域网端口:4个(4) 10/100/1000——Mbps 自适应,Auto Uplink? RJ-45 端口 广域网端口:2个(2) 10/100/1000——Mbps自适应,Auto Uplink?RJ-45 端口连接至任何调制解调器,例如DSL或Cable 负载均衡或链路备份模式 状态数据包检测(SPI): ?防止拒绝服务(DoS)攻击 ?支持潜行模式(stealth mode) ?用户支持:无限制 关键字过滤: ?地址 ?服务(例如:FTP,SMTP,HTTP,RPL,SNMP,DNS,ICMP,NNTP, POP3,SSH, telnet 等等。) ?协议 ?Web URL 端口/服务阻塞 ?文件扩展(不包括:Java,URL,ActiveX)端口/服务隔离 IPsec VPN 25个(25)专用VPN 隧道 预共享密钥和RSA/DSS 特征的手动密钥及 IKE Security Association (SA)分配 ?具有预共享密钥特征
性能稳定性分析 1功角的具体含义。 电源电势的相角差,发电机q轴电势与无穷大系统电源电势之间的相角差。 电磁功率的大小与δ密切相关,故称δ为“功角”或“功率角”。电磁功率与功角的关系式被称为“功角特性”或“功率特性”。 功角δ除了表征系统的电磁关系之外,还表明了各发电机转子之间的相对空间位置。 2功角稳定及其分类。 电力系统稳态运行时,系统中所有同步发电机均同步运行,即功角δ是稳定值。系统在受到干扰后,如果发电机转子经过一段时间的运动变化后仍能恢复同步运行,即功角δ能达到一个稳定值,则系统就是功角稳定的,否则就是功角不稳定。 根据功角失稳的原因和发展过程,功角稳定可分为如下三类: 静态稳定(小干扰) 暂态稳定(大干扰) 动态稳定(长过程) 3电力系统静态稳定及其特点。 定义:指电力系统在某一正常运行状态下受到小干扰后,不发生自发振荡或非周期性失步,自动恢复到原始运行状态的能力。如果能,则认为系统在该正常运行状态下是静态稳定的。不能,则系统是静态失稳的。 特点:静态稳定研究的是电力系统在某一运行状态下受到微小干扰时的稳定性问题。系统是否能够维持静态稳定主要与系统在扰动发生前的原始运行状态有关,而与小干扰的大小、类型和地点无关。 4电力系统暂态稳定及其特点。 定义:指电力系统在某一正常运行状态下受到大干扰后,各同步发电机保持同步运行并过渡到新的或恢复到原来的稳态运行状态的能力。通常指第一或第二振荡周期不失步。如果能,则认为系统在该正常运行状态下该扰动下是暂态稳定的。不能,则系统是暂态失稳的。 特点:研究的是电力系统在某一运行状态下受到较大干扰时的稳定性问题。系统的暂态稳定性不仅与系统在扰动前的运行状态有关,而且与扰动的类型、地点及持续时间均有关。 作业2 5发电机组惯性时间常数的物理意义及其与系统惯性时间常数的关系。 表示在发电机组转子上加额定转矩后,转子从停顿状态转到额定转速时所经过的时间。TJ=TJG*SGN/SB 6例题6-1 (P152) (补充知识:当发电机出口断路器断开后,转子做匀加速旋转。汽轮发电机极对数p=1。额定频率为50Hz。要求列写每个公式的来源和意义。)题目:已知一汽轮发电机的惯性时间常数Tj=10S,若运行在输出额定功率状态,在t=0时其出口处突然断开。试计算(不计调速器作用) (1)经过多少时间其相对电角度(功角)δ=δ0+PAI.(δ0为断开钱的值)(2)在该时刻转子的转速。 解:(1)Tj=10S,三角M*=1,角加速度d2δ/dt2=三角M*W0/Tj=W0/10=31.4RAD/S2 δ=δ0+0.5dd2δ/dt2 所以PI=0.5*2PI*f/10t方 t=更号10/50=0.447 (2)t=0.447时,
切换系统的稳定性调研报告 陈龙0909122920 自动化1206班 丁志成0909122921 自动化1206班 摘要:本文通过查找文献的方法来了解切换系统及其应用领域、切换系统稳定性的特点、主要结果、研究方法(使用的主要数学工具)和研究现状;了解研究的难点,还有哪些有待研究的问题。 关键词:切换系统稳定性李雅普诺夫函数 一、切换系统的定义及其应用领域 切换系统是一种包含多个连续或离散子系统的混杂系统,并由切换信号来控制它在各个子系统之间切换,它是从系统与控制论角度来研究的一种特殊混杂系统。近年来,切换系统由于其结构形式相对简单,便于理解,分析和实际应用,而被广泛的研究与讨论。在实践应用中,许多自然、社会及工程系统会随环境的变化而展现不同的的模型,如输电系统、飞行器队型、运动机器人、神经网络、交通控制、汽车工业等,而用切换系统可以很好地刻画出这些系统的数学模型。 二、切换系统稳定性的特点 子系统的稳定性不等价于切换系统的稳定性,也就是说,即使它的所有子系统都稳定,整个系统不一定稳定;同样,即使各个子系统都不稳定,也不能说明整个切换系统不稳定。 三、切换系统稳定性的研究方法 1、多李雅普诺夫函数法: 多李雅普诺夫函数法的基本思想是对每个子系统都要寻找一个李雅普诺夫函数进行稳定性分析。该研究方法保守性小,有利于数学推导。 2、公共李雅普诺夫函数法: 公共李雅普诺夫函数法是在多李雅普诺夫函数法之后被提出来的,主要用于判定一个系统对于任意切换是否稳定。利用这一方法证明系统稳定性的关键是研究公共李雅普诺夫函数的存在条件。 3、驻留时间法: 驻留时间法又叫慢变切换,这一思想来源于Desoer关于慢时变系统的著名论断:如果系统所有子系统的矩阵都是Hurwitz矩阵,那么在足够缓慢的切换下可以保持系统稳定。 4、其他方法 四、切换系统稳定性的研究成果 1、任意切换下的稳定性:对切换线性系统,任意切换条件下的几种稳定性是等价的:渐近稳定、全局渐近稳定、(全局)指数稳定。 2、约束切换下的稳定性:。一般分为两类,一类是切换规则受到状态演化的约束,还有一类就是约束切换发生的速率。比较而言,实践中更为重要的一类问题是:给定一族非Hurwitz 矩阵,判定是否存在状态相关的切换律,使得系统是全局一致渐近稳定的。对切换线性系统约束切换条件下,对状态轨迹无关(时间相关)的切换信号,一致渐近稳定等价于指数稳定;对状态轨迹相关的切换信号,二者之间并无确定性的等价关系。约束切换又可分为以下三个方面:切换速率的约束:如果所有的子系统矩阵都是Hurwitz的,那么在足够缓慢的切换条
土坡稳定性计算书 计算依据: 1、《建筑基坑支护技术规程》JGJ120-2012 2、《建筑施工计算手册》江正荣编著 3、《实用土木工程手册》第三版杨文渊编著 4、《施工现场设施安全设计计算手册》谢建民编著 5、《地基与基础》第三版 计算土坡稳定性采用圆弧条分法进行分析计算,由于该计算过程是大量的重复计算,故本计算书只列出相应的计算公式和计算结果,省略了重复计算过程。 本计算书采用瑞典条分法进行分析计算,假定滑动面为圆柱面及滑动土体为不变形刚体,还假定不考虑土条两侧上的作用力。 一、参数信息: 基本参数: 放坡参数: 序号 放坡高度L(m) 放坡宽度W(m) 平台宽度B(m) 1 3.5 2.25 0.75 2 4 3 1.5 荷载参数: 土层参数:
1 填土 3.5 19.8 7.4 20.4 8 20 2 粘性土 3.5 20 16. 3 45.8 21 23 3 粘性土 3.6 20.3 17. 4 64.1 23 23 二、计算原理: 根据土坡极限平衡稳定进行计算。自然界匀质土坡失去稳定,滑动面呈曲面,通常滑动面接近圆弧,可将滑裂面近似成圆弧计算。将土坡的土体沿竖直方向分成若干个土条,从土条中任意取出第i条,不考虑其侧面上的作用力时,该土条上存在着: 1、土条自重, 2、作用于土条弧面上的法向反力, 3、作用于土条圆弧面上的切向阻力。 将抗剪强度引起的极限抗滑力矩和滑动力矩的比值作为安全系数,考虑安全储备的大小,按照《规范》要求,安全系数要满足≥1.35的要求。 圆弧滑动法示意图 三、计算公式: K sj=∑{c i l i+[ΔG i b i+qb i]co sθi tanφi}/∑[ΔG i b i+qb i]sinθi 式子中: K sj --第j个圆弧滑动体的抗滑力矩与滑动力矩的比值;
卫计委图文报告工作站参数 以下产品各需四套 2、软件 CT/MR/DR医学影像工作站,针对DICOM和非DICOM CT/MR/DR设备的影像诊工作站,集登记、图像传输或采集、阅片、报告于一体,并提供数据管理、统计、备份等功能。软件完全符合DICOM3.0国际标准,可轻松接入PACS系统,为将来系统的升级做好初步准备。 CT/MR/DR医学影像工作站操作方便、界面美观、全中文人性化程序设计、稳定性好、集图像传输或视频图像采集、图像处理、图像测量、报告存储及打印等功能于一体,易学易用,在国内同类产品中保持领先地位。医院以较小投资,进入信息化诊断存储以及医务管理的新时代,是医院影像科室的最佳选择。 数字传输 ●支持DICOM 3.0标准图像格式的接收、存储,支持JEPG(有损/无损)压缩的图像显示;(标准) 远程医疗 ★可升级位远程诊断工作站,把图像和病例上传到服务器,会诊专家做好报告再回传。(支持视频聊天)数据库 ★同时支持SQLserver,甲骨文,Firebird企业级数据库。 图像处理与测量 具有强大丰富的图像处理功能:缩放、移动、漫游、伪彩、负像显示、旋转、增强、镜像、电影回放、窗宽窗位调节、ROI调窗、MPR、MIP、SSD功能;提供CT值、长度、角度、面积、心胸比值等数据的测量;
提供多种标注功能:提供直线、矩形、圆形、椭圆形、箭头、曲线、多边形等多种标注方式,同时提供长度,周长、面积测量; 具有图像的导入、导出功能,可以方便地将图像导出保存为DICOM DIR,DICOM(原始图像),BMP,JPG 格式。 ★支持多张DR图像拼接 图像管理 ●遵循国际DICOM标准,SATA硬盘或阵列大容量存储。 ●针对三甲医院病人就诊量和高级大型设备设计,比如64排、128排CT机器,软件稳定高效。 诊断报告 ●可打印图文并茂报告。 ●可导存为BMP、JPG。 ★医学影像工作站软件可以自由设计各种各样的报告样式; ★所见即所得模式,提供专家词库,并可增加、修改、删除 ●支持任意大小的纸张打印,如:A4、B5、A5、16K等等; 胶片打印 ●可以支持市场上的各种品牌胶片打印机; ●最大预设9*9排版,并可自定义排版方式,可拼接、合并排版;可对图像进行放大、缩小、漫游等打印排版操作。 ★直接支持喷墨和激光胶片打印, 病历查询 可进行任意项目搭配的组合查询,查询结果可以打印成报表。 统计分析 ●所有病人项目(姓名、性别、年龄、病种、费用)都可进行统计,统计结果可以打印成报表,完全抛弃烦琐的手工统计工作; ●工作量统计功能。 ●统计:包括阳性率、疾病分布等统计子项; ●统计结果输出到打印机打印。 备份与恢复软件 ●数据备份与管理:采用在线、在线已缓存、离线等多种状态标示图像状态; ●支持光盘刻录功能,可插入光驱后自动调阅影像,方便教学等应用; ★能连接县域医学影像诊断中心并实时上下传输。 参数要求中★必须符合,负责做废标处理。 3、激光打印机 多功能黑白激光一体机、打印/复印/扫描、A4、鼓粉分离、打印速度20ppm、分辨率、1200dpi,600×600dpi、首页打印时间、<10秒,复印速度、20cpm、复印分辨率、600×600dpi、连续复印、1-50000页 4、干式激光胶片相机 一、胶片技术参数要求: ★1、医用干式激光成像胶片(采用聚脂片基为支持体,单面涂有卤化银感光乳剂); 2、直接用于干式激光相机成像,无需添加洗影药液或其它打印材料。 3、有效期≥12个月; 4、功能:通过最优化影像控制,为CT,MIR,DR和其它影像设备提供锐利、清晰的影像; 5、胶片规格(英寸):14×17、11 ×14、10X12、8X10。
第九章土坡稳定分析 土坡就是具有倾斜坡面的土体。土坡有天然土坡,也有人工土坡。天然土坡是由于地质作用自然形成的土坡,如山坡、江河的岸坡等;人工土坡是经过人工挖、填的土工建筑物,如基坑、渠道、土坝、路堤等的边坡。本章主要学习目前常用的边坡稳定分析方法,学习要点也是与土的抗剪强度有关的问题。 第一节概述 学习土坡的类型及常见的滑坡现象。 一、无粘性土坡稳定分析 学习两种情况下(全干或全淹没情况、有渗透情况)无粘性土坡稳定分析方法。要求掌握无粘性土坡稳定安全系数的定义及推导过程,坡面有顺坡渗流作用下与全干或全淹没情况相比无粘性土土坡的稳定安全系数有何联系。 二、粘性土坡的稳定分析 学习其整体圆弧法、瑞典条分法、毕肖甫法、普遍条分法、有限元法等方法在粘性土稳定分析中的应用。要求掌握圆弧法进行土坡稳定分析及几种特殊条件下土坡稳定分析计算。 三、边坡稳定分析的总应力法和有效应力法 学习稳定渗流期、施工期、地震期边坡稳定分析方法。 四、土坡稳定分析讨论 学习讨论三个问题:土坡稳定分析中计算方法问题、强度指标的选用问题和容许安全系数问题。 第二节基本概念与基本原理 一、基本概念 1.天然土坡(naturalsoilslope):由长期自然地质营力作用形成的土坡,称为天然土坡。2.人工土坡(artificialsoilslope):人工挖方或填方形成的土坡,称为人工土坡。 3.滑坡(landslide):土坡中一部分土体对另一部分土体产生相对位移,以至丧失原有稳 定性的现象。 4.圆弧滑动法(circleslipmethod):在工程设计中常假定土坡滑动面为圆弧面,建立这一 假定的稳定分析方法,称为圆弧滑动法。它是极限平衡法的一种常用分析方法。 二、基本规律与基本原理 (一)土坡失稳原因分析 土坡的失稳受内部和外部因素制约,当超过土体平衡条件时,土坡便发生失稳现象。1.产生滑动的内部因素主要有: (1)斜坡的土质:各种土质的抗剪强度、抗水能力是不一样的,如钙质或石膏质胶结的土、湿陷性黄土等,遇水后软化,使原来的强度降低很多。 (2)斜坡的土层结构:如在斜坡上堆有较厚的土层,特别是当下伏土层(或岩层)不透水时,容易在交界上发生滑动。 (3)斜坡的外形:突肚形的斜坡由于重力作用,比上陡下缓的凹形坡易于下滑;由于粘性土有粘聚力,当土坡不高时尚可直立,但随时间和气候的变化,也会逐渐塌落。 2.促使滑动的外部因素 (1)降水或地下水的作用:持续的降雨或地下水渗入土层中,使土中含水量增高,土中易溶盐溶解,土质变软,强度降低;还可使土的重度增加,以及孔隙水压力的产生,使土体作用有动、静水压力,促使土体失稳,故设计斜坡应针对这些原因,采用相应的排水措施。(2)振动的作用:如地震的反复作用下,砂土极易发生液化;粘性土,振动时易使土的结
编号配置项 方案1 方案2方案3方案4方案5 方案6 小于500个14MP图片 14332-S1AG9614364-S15T4ARG9613764-S15T4ARG9713764-S15T4BRG9823564-S15T8ARG97235128-S15T8BRG986核4.3Ghz/32GB/GTX960/1TBSSD/24”高清液晶 6核4.3Ghz/64GB/GTX960/512GBSSD+3T B 高速盘/24”高清液晶8核3.7Ghz/64GB/GTX970/512GBSSD+3T B 高速盘/24”高清液晶8核3.7Ghz/64GB/GTX980/512GBSSD+7T B 高速盘/28”4K 液晶16核3.5Ghz/64GB/GTX970/512SSD+7TB 高速盘/24”高清液晶16核3.5Ghz/128GB/GTX980/512SSD+14TB 高速盘/28”4k 液晶1.1CPU intel 至尊处理器intel 至尊处理器intel 至尊处理器intel 至尊处理器双Xeon E5 2667v3双Xeon E5 2667v3 (6核 4.3Ghz/15MB)(6核 4.3Ghz/15MB)(8核 3.7Ghz/20MB)(8核 3.7Ghz/20MB)(16核3.5Ghz/20MB)(16核3.5Ghz/20MB)1.2内存 32GB(4*8GB )DDR4 2133 REG ECC 64GB(4*16GB ) DDR42133 REG ECC 64GB(4*16GB )DDR4 2133 REG ECC 64GB(4*16GB ) DDR42133 REG ECC 64GB(4*16GB ) DDR42133 REG ECC 128GB(8*16GB ) DDR4 2133 REG ECC 1.3图卡Nvidia GTX960 2GB Nvidia GTX960 2GB Nvidia GTX970 4GB Nvidia GTX980 4GB Nvidia GTX970 4GB Nvidia GTX980 4GB 1.4系统盘1TB SSD 512GB SSD 512GB SSD 512GB SSD 512GB SSD 512GB SSD 1.5数据盘无3TB Pcie-SATA高速盘3TB Pcie-SATA高速盘6TB Pcie-SATA高速盘7TB Pcie-SATA高速盘14TB Pcie-SATA高速盘1.7平台1.8硬盘位1.9扩展槽1.10后侧端口1.11显示器24“高清图显24“高清图显24“高清图显28”-4K图显24“高清图显28”-4K图显1.12操作系统 2.1CPU 计算2.2内存带宽峰值133GB/s 2.3像素填充率40.57GPs 40.57GPs 3 3.6GPs 72.06GPs 33.6GPs 72.06GPs 显存带宽112GBs 112GBs 224.32GBs 224.32GBs 224.32GBs 224.32GBs 2.4单精度浮点 2.31TFlops 2.31TFlops 3.94TFlops 4.61TFlops 3.94TFlops 4.61TFlops 双精度浮点 1.15TFlops 1.15TFlops 1.75TFlops 2.31TFlops 1.75TFlops 2.31TFlops 2.5硬盘端口读写:550MB/s、2.6分辨率1920*10801920*10801920*10803840*21601920*10803840*2160 售价 ¥39,000.00¥47,500.00¥57,000.00¥69,990.00¥99,990.00¥118,000.00 西安坤隆计算机科技有限公司北京事业部 峰值66.66GB/s 读带宽:5.8GB/s,写带宽:4GB/s,缓存2GB 3 整机优化 :(1)高性能系统优化 (2) CPU+GPU混合计算模式 (3)高速数据读写与安全防护技术 2个Intel千兆口/10个USB3.0/2个USB2.0/7声道 2个Intel千兆口/6个USB3.0/2个USB2.0/7声道(1)支持windows XP/7/8/2008R2/2012 ,(2)支持Linux全系列 (3)支持Windows实时操作系统2.主要技术性能指标每秒2064亿次(206GFlops)每秒2368亿次(236.8GFlops)每秒4480亿次(448GFlops)主要配置1. 配置规格塔式(DVD刻录机,900w,静音级)/104 键盘+1000dpi光电鼠标(USB口)塔机架式(DVD刻录机,1200w,静音级)2个PCIe 16X 3.0/3个PCIe x8 3.0/1个PCIe x4 2.0/2个PCIe 16X 3.0/4个PCIe x8 3.08*3.5"+5.25"4*3.5"+2*5.25"UltraLAB 极速图形工作站报价 简介:本配置方案定位于无人机数据高速处理,配备最先进的高速计算和高速硬盘读写架构,满足实时图像处理需求计算规模 500~1000个14MP图片之间 超过1000个14MP图片 机型UltraLAB H600 UltraLAB H470
第七章土坡稳定性分析 第一节概述 土坡就是由土体构成、具有倾斜坡面的土体,它 的简单外形如图7-1所示。一般而言,土坡有两种类 型。由自然地质作用所形成的土坡称为天然土坡,如 山坡、江河岸坡等;由人工开挖或回填而形成的土坡 称为人工土(边)坡,如基坑、土坝、路堤等的边坡。 土坡在各种内力和外力的共同作用下,有可能产生剪 图7-1 土坡各部位名称 切破坏和土体的移动。如果靠坡面处剪切破坏的面积 很大,则将产生一部分土体相对于另一部分土体滑动的现象,称为滑坡。土体的滑动一般系指土坡在一定范围内整体地沿某一滑动面向下和向外移动而丧失其稳定性。除设计或施工不当可能导致土坡的失稳外,外界的不利因素影响也触发和加剧了土坡的失稳,一般有以下几种原因: 1.土坡所受的作用力发生变化:例如,由于在土坡顶部堆放材料或建造建筑物而使坡顶受荷。或由于打桩振动,车辆行驶、爆破、地震等引起的振动而改变了土坡原来的平衡状态; 2.土体抗剪强度的降低:例如,土体中含水量或超静水压力的增加; 3.静水压力的作用:例如,雨水或地面水流入土坡中的竖向裂缝,对土坡产生侧向压力,从而促进土坡产生滑动。因此,粘性土坡发生裂缝常常是土坡稳定性的不利因素,也是滑坡的预兆之一。 在土木工程建筑中,如果土坡失去稳定造成塌方,不仅影响工程进度,有时还会危及人的生命安全,造成工程失事和巨大的经济损失。因此,土坡稳定问题在工程设计和施工中应引起足够的重视。 天然的斜坡、填筑的堤坝以及基坑放坡开挖等问题,都要演算斜坡的稳定性,亦既比较可能滑动面上的剪应力与抗剪强度。这种工作称为稳定性分析。土坡稳定性分析是土力学中重要的稳定分析问题。土坡失稳的类型比较复杂,大多是土体的塑性破坏。而土体塑性破坏的分析方法有极限平衡法、极限分析法和有限元法等。在边坡稳定性分析中,极限分析法和有限元法都还不够成熟。因此,目前工程实践中基本上都是采用极限平衡法。极限平衡方法分析的一般步骤是:假定斜坡破坏是沿着土体内某一确定的滑裂面滑动,根据滑裂土体的静力平衡条件和莫尔—库伦强度理论,可以计算出沿该滑裂面滑动的可能性,即土坡稳定安全系数的大小或破坏概率的高低,然后,再系统地选取许多个可能的滑动面,用同样的方法计算其稳定安全系数或破坏概率。稳定安全系数最低或者破坏概率最高的滑动面就是可能性最大的滑动面。 本章主要讨论极限平衡方法在斜坡稳定性分析中的应用,并简要介绍有限元法的概念。 182
土坡稳定性计算计算书 本计算书参照《建筑施工计算手册》江正荣编著中国建筑工业出版社、《实用土木工程手册》第三版杨文渊编著人民教同出版社、《地基与基础》第三版中国建筑工业出版社、《土力学》等相关文献进行编制。 计算土坡稳定性采用圆弧条分法进行分析计算,由于该计算过程是大量的重复计算,故本计算书只列出相应的计算公式和计算结果,省略了重复计算过程。 本计算书采用瑞典条分法进行分析计算,假定滑动面为圆柱面及滑动土体为不变形刚体,还假定不考虑土条两侧上的作用力。 一、参数信息: 条分方法:瑞典条分法; 条分块数:50; 考虑地下水位影响; 基坑外侧水位到坑顶的距离(m):2.000 基坑内侧水位到坑顶的距离(m):6.000
二、计算原理: 根据土坡极限平衡稳定进行计算。自然界匀质土坡失去稳定,滑动面呈曲面,通常滑动面接近圆弧,可将滑裂面近似成圆弧计算。将土坡的土体沿竖直方向分成若干个土条,从土条中任意取出第i条,不考虑其侧面上的作用力时,该土条上存在着: 1、土条自重, 2、作用于土条弧面上的法向反力, 3、作用于土条圆弧面上的切向阻力。 将抗剪强度引起的极限抗滑力矩和滑动力矩的比值作为安全系数,考虑安全储备的大小,按照《规范》要求,安全系数要满足>=1.3的要求。 三、计算公式: 式子中: F s --土坡稳定安全系数; c --土层的粘聚力; l i--第i条土条的圆弧长度; γ --土层的计算重度; θi --第i条土到滑动圆弧圆心与竖直方向的夹角;
φ --土层的内摩擦角; b i --第i条土的宽度; h i --第i条土的平均高度; h1i――第i条土水位以上的高度; h2i――第i条土水位以下的高度; γ' ――第i条土的平均重度的浮重度; q――第i条土条土上的均布荷载; 四、计算安全系数: 将数据各参数代入上面的公式,通过循环计算,求得最小的安全系数Fs: 第1步:安全系数=1.417,标高=-2.000,圆心X=0.962米,圆心Y=1.344米,半径R=3.344米示意图如下:
全自动图像扫描分析系统技术参数要求 一、项目概述 本次商谈的内容为AA港市第一人民医院全自动图像扫描分析系统采购,卖方负责将全自动图像扫描分析系统运抵买方指定机房,完成安装,检测、验收合格,交付买方使用,即交钥匙工程。 二、主要技术参数 1、整机为原装进口,具有CFDA注册证 2、整套系统支持网络化运行,全部实现网络化操作功能 3、软件功能描述 (1)全自动扫描功能 A. 扫描并记录每一个目标(中期分裂相或间期细胞、微核等)的坐标位置,单键选择即可自动移动载物台到目标位置,软件同时可以将此坐标位置转换成实验室其他显微镜下的坐标来查看。 B. 系统实现了中期分裂相由低倍镜扫描查找切换到高倍镜图像捕获的全自动处理,包括自动对焦、自动选择清晰、高质量的最优分裂相、自动进行细胞分类等功能。细胞的数量和捕获所基于的参数都可由用户进行设置。 C. 采用自动滴油系统,从扫描到捕获可以连续自动执行。 D. 可自动检测盖玻片边缘和滴片区域,进行更准确、快速的对焦; E. 可自动将细胞与对应的克隆关联,并将不同的克隆和找到的中期分裂相分别进行数字和颜色标识 F. 扫描向导清楚明了,可用于所有样本,包括点计数。 G. 查找应用程序能根据应用需要进行中期分裂相和间期细胞的识别。 H. 用户可自行创建并训练分类器,用于标识所需要的细胞形态,在扫描期间自动将细胞标记为“待采集”(绿色)或“待定义”(白色),并根据相应的规则对“复查”中显示的细胞进行排序,不断提高扫描效率。
I. 能够自动识别超出一个视野范围的染色体中期分裂相,并捕获任何所需的融合图像来完成完整细胞的捕获。 J. 具有延时捕获功能,将捕获与自动扫描分开,用户可以手动选择想要用高倍镜捕获的中期分裂相,用于捕获处理不佳的样本的图像。 K. 可在当前批次中插入处理优先案例或紧急案例。. L. 具有多用户接入功能,允许不只一名技师对同一病例或玻片进行分析。 M. 能满足多重实验室质量控制要求,包括分析者自查,审核者平行审查,可视化的汇总表。自动跟踪并记录所有拍摄细胞的流程处理情况,包括计数,分析,核型分析,异常染色体,性别等,并记录坐标、图像和结果。 N. 可对染色体异常,包括缺失、断裂、倒位、插入等情况进行打分,并实现电子追踪。 (2)软件基本功能 a)系统支持中文。 b)可实现文件的显示和集合,实验资料的管理。 c)具有染色体核型分析功能。 d)具有染色体中期分裂相自动扫描功能。 e)全面的病案管理功能,每个病人的图片独立管理,所有相关信息自动保存。 f)实现核型、中期分裂相、实验报告的高分辨率打印;自定义创建中文病例信息录入模板;自定义生成含不同中期分裂相及核型的中文报告单模板。 g)可通过JPG、TIF等标准格式文件导入导出图像 h)通过Internet在线交互式技术支持和维护。 (3)核型分析功能 a)全自动扫描与核型分析可实现无缝连接。 b)对十字交叉、粘联和重叠的染色体具有预分割功能,并可采用自动或手工染色体分割。 c)能对染色体进行倒转、旋转、拉直和彩色涂抹识别操作。
. Matlab在控制系统稳定性判定中的应用 稳定是控制系统的重要性能,也是系统能够工作的首要条件,因此,如何分析系统的稳定性并找出保证系统稳定的措施,便成为自动控制理论的一个基本任务.线性系统的稳定性取决于系统本身的结构和参数,而与输入无关.线性系统稳定的条件是其特征根均具有负实部. 在实际工程系统中,为避开对特征方程的直接求解,就只好讨论特征根的分布,即看其是否全部具有负实部,并以此来判别系统的稳定性,由此形成了一系列稳定性判据,其中最重要的一个判据就是劳斯判据。劳斯判据给出线性系统稳定的充要条件是:系统特征方程式不缺项,且所有系数均为正,劳斯阵列中第一列所有元素均为正号,构造劳斯表比用求根判断稳定性的方法简单许多,而且这些方法都已经过了数学上的证明,是完全有理论根据的,是实用性非常好的方法. 具体方法及举例: 一用系统特征方程的根判别系统稳定性 设系统特征方程为s5+s4+2s3+2s2+3s+5=0,计算特征根并判别该系统的稳定性。在command window窗口输入下列程序,记录输出结果。 >> p=[1 1 2 2 3 5]; >> roots(p) 二用根轨迹法判别系统稳定性:对给定的系统的开环传递函数 1.某系统的开环传递函数为,在command window窗口输入程序,记录系统闭环零极点图及零极点数据,判断该闭环系统是否稳定。 >> clear >> n1=[0.25 1]; >> d1=[0.5 1 0]; >> s1=tf(n1,d1);
. >> sys=feedback(s1,1); >> P=sys.den{1};p=roots(P) >> pzmap(sys) >> [p,z]=pzmap(sys) 2
图形工作站采购项目 一、采购需求 采购仪器主要技术参数及性能规格和售后服务有关要求: 1、ThinkStation C30 1 套 紧凑型塔式:英特尔? 至强? 四核处理器 E5-2609*2,内存控制器1333MHz,共享12M缓存/32GB DDR3 1333MHz ECC内存/6 TB 7200rpm SATA硬盘/Rambo光驱/Nvidia Quadro 2000 1GB 独立显卡/千兆网卡/键盘/无线鼠 标 /DVI线 /Windows 7 64位专业版操作系统/无显示器 2、Thinkpad W530-5 3台 英特尔?第三代酷睿? i7-3520M双核处理器(2.90睿频至3.60GHz,4MB) 8GB 1600MHz DDR3内存 1TB 硬盘 (转速:5400RPM)/Rambo光驱/NVIDIA Quadro? K1000M 15.6显示屏,2GB 独立显存,双显卡可切换/色彩校正器/Smart Card 读卡器/英特尔?6205AGN无线网卡/蓝牙/千兆网卡/Express+4合1读卡器/指纹识别器/Displayport接口/1394接口/720p HD摄像头/6芯电池/Windows7 Pro 64位操作系统/三年保修(电池一年保修) 附件:原装电脑包 二、售后服务内容、要求和期限 1、投标人所提供的仪器和设备必须是正版原装品牌,符合国家质量检测标准。 2、供应商报价中要包含产品全部的配件、运输、税费等全部费用。 3、原厂3年免费上门维修。 三、资质要求: 1、为确保采购商品是通过正规渠道提供的原厂正品,要求投标人是厂商正规经销商或代理商,竞价时随附件上传资质证明。 2、为保证送货和维修及时,货物应由供应商送货到我单位并且提供免费安装调试服务,不得使用客户自提等方式发货。
切换系统来源于实际控制系统,所以对其研究不但是现代控制理论发展的需要,更是试图解决大量实际问题的迫切需求.不同于一般系统,切换系统在运行过程中,切换规则起着重要作用,不同的切换规则将导致完全不同的动态特征:若干个稳定的子系统在某一切换规则下可导致整个系统不稳定.而若干个不稳定的子系统在适当的切换下可使整个系统稳定,即其子系统的稳定性不等价于整个系统的稳定性. 1999年Daniel Liberzon和A. Stephen Morse发表了一篇切换系统稳定性分析的综述文章,并归结为如下三个基本问题: 问题1:切换系统在任意切换下渐近稳定的条件; 问题2:切换系统在受限切换下是否渐近稳定; 问题3:如何设计切换信号,使得切换系统在该切换信号下渐近稳定. 以上三个问题是在研究切换系统稳定时密不可分的。 我们在研究切换系统稳定性的时候,大多围绕这三个问题展开.在对控制系统进行分析的过程中,已经有了很多的研究方法,在研究切换系统的稳定性时,我们经常用到的方法有:单Lyapunov 函数方法,共同Lyapunov 函数方法,多Lyapunov 函数方法,共同控制Lyapunov 函数方法,backstepping 方法,LMI等。 切换系统基本知识 定义1一个切换系统被描述成以下微分方程的形式 ()(1)其中这里:是一族的充分正则函数,:是关于时间的分段.常值函数,称为切换新号。有可能取决于时间t或状态 ,或 () 两者都有。P是某个指标集。以下非特别指明假设P都是有限集。如果这里所有的子系统都是线性的,我们就得到一个线性切换系统, (2) 1任意切换下稳定 很明显,为了研究切换系统在任意切换下的稳定性,我们必须假设所有系统都是稳定的,这点对于切换系统的稳定只是必要条件。我们要研究的是为了使切换系统在任意切换下稳定还需要什么条件。 存在共同Lyapunov函数是系统在任意切换下渐近稳定的充要条件,因而寻求共同Lyapunov函数存在的条件是解决稳定性问题的一个途径。共同Lyapunov 函数法与传统的Lapunov直接法基本是一致的。其主要思想是:对于切换系统,如果各子系统存在共同Lyapunov函数,那么系统对于任意的切换序列都是稳定的。 定理1 Lapunov稳定性定理为研究切换系统的稳定性提供了一个基本工具,具体如下: 对于切换系统(1),如果存在正定连续可微的函数V:,正定连续的函数W:,满足 ,
附件: 一、系统功能要求和主要技术参数: (一) 、临床检验信息系统(LIS): 通过与各种检验设备进行连接,实现检验数据的自动采集、自动控制及自动分析,实现检验结果的及时获取与传送。检验系统能从HIS系统取出各科室医生发送的检验申请单,并能将检验报告直接发送到HIS系统和体检系统。具体功能如下: 1.生成检验申请单 (1) 检验科录入检验申请单 (2) 打印样本工作清单 (3) 记录采样者、采样日期、采样时间等 (4) 将HIS 系统中的检验信息转为检验申请单 (5) 将体检系统中的申请转换为检验申单 2.结果处理 (1) 支持键盘录入、修改检验结果,包括单个和成批方式 (2) 支持自动生成计算项目,判定结果高低状态并标示 (3) 支持区别常规报告、急诊报告、打印报告、未打印报告 (4) 可以单个报告审核,也可以批量报告审核 (5) 可以用当前结果与历史结果的比对并图形显示 (6) 可以查询当前医嘱中所有项目结果的比对和图形显示 (7) 可以查询当前患者的所有历史医嘱,并可浏览其中任何医嘱结果 (8) 可以对符合警戒或荒谬范围值的结果进行提示和处理说明 (9) 提供最近一次结果的显示 (10) 可以进行检验图形的处理 (11) 能单个或成批打印各专业检验报告,供临床部门使用 (12) 支持撤销已审定检验报告,并记录撤销人和时间 (13)支持检查结果合并,不同类别检查合并打印 3.标本管理 (1)对分析完的标本原始数据进行存储 (2)根据指定的标本可以定位标本的存储位置 4.仪器连接
(1) 双向通讯,支持单机连多个仪器 (2) 实现数据安全传输 (3) 实现仪器和终端机的分开,改善工作环境 注:要包括软、硬件的与仪器连接。 6.系统管理 (1)操作人员权限分级管理 (2)系统参数设置 (二)、体检系统(PEIS): 1、预约登记 提前预约登记、能完成摄像、打印有照片的体检指引单、打印带相片的体检报告,报告格式可由医院定制。 2、登记管理 可进行个人和团体的登记;可人工输入相关资料,同时支持将预先准备好的体检文件导入数据库(一般为Excel文件)。 3、综合管理 可以通过一个界面完成所有的资料录入。如:体检人员信息、套餐信息、体检结果录入等。 4、表格打印 可根据不同的套餐打印不同的检查表格。 5、条码打印 可根据套餐选择的不同情况,打印相对应的条码。 6、验血拍照 可对登记过的体检人员进行拍照,以避免冒名顶替的情况发生。 7、医生工作站 体检医生可通过权限录入所在体检科室的体检结果。 8、结果录入 可录入所有体检项目的结果。 9、结果批录入 (1、)可快速录入同一体检项目的相同结果。 (2、)可自动接收LIS系统和PACS系统的检查结果。 10、主检审核
2009年11月电工技术学报Vol.24 No. 11 第24卷第11期TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Nov. 2009 基于切换系统理论的三相变流器建模 及其稳定性分析 李琼林1刘会金2宋晓凯1王 1张振安1 (1. 河南电力试验研究院郑州 450052 2. 武汉大学电气工程学院武汉 430072) 摘要功率开关的动作使得三相变流器成为一典型的切换系统,它同时包含连续和离散两种动态,常规的建模方法都是从线性系统理论出发,通过平均化、坐标变换或小信号线性化等方法得到系统的近似线性化模型。本文在考虑变流器的混杂系统特征基础上,直接从切换系统理论出发,建立了三相变流器的切换系统模型,并针对整流器和逆变器分别给出了相应的切换系列。该模型完全精确,不存在任何近似,更能真实反映变流器的实际物理工作过程。通过引入线性切换系统的稳定性判定法则,对三相变流器的切换过程的稳定性进行了分析。仿真和实验结果与理论分析具有很好的一致性,验证了本文所提方法的有效性。 关键词:变流器 建模 切换系统 稳定性分析 中图分类号:TM46 Modeling and Stability Analysis of Three-Phase Converter Based on Switching System Theory Li Qionglin1 Liu Huijin2 Song Xiaokai1Wang Jing1Zhang Zhen’an1 (1. Henan Electric Power Research Institute Zhengzhou 450052 China 2. Wuhan University Wuhan430072China) Abstract Converter is a typical switching system for the action of the power switch. It includes two dynamical states of the continuous and the discrete. The conventional method of modeling was based on the linear system theory, through the methods of averaging, coordinate transformation and linearization etc, an approximate model could be obtained. Considering the hybrid trait of the converter, this paper deduces the switching system model of the converter, and gives the switch sequences respectively for the inverter and the rectifier. The new model is accurate, and it can represent the actual system completely. By introducing the determinant principle of stability for the linear switch system, this paper analyzes the switch course stability of the converter. The final simulation results has good agreement with the theory analysis. The validity of the method presented in this paper is approved. Keywords:Converter, modeling, switching system, stability analysis 1引言 功率开关器件的存在,使得电力电子电路同时包含连续和离散两种动态,建立精确的数学模型是分析和设计电力电子电路的基础。状态空间平均法是一种比较简单、有效的小信号分析方法,已用于多种功率变换器的建模[1-2],该方法通常适用于仅具有两种不同电路状态的变流器的建模分析,如DC/DC变换器。对于三相变流器,由于其开关模态的增加,以及所处理的信号包含时变的正弦信号,其建模过程更加复杂,开关函数描述法是一种更加普遍、更精确的建模方法[3],更能描述电路的连续、 国家自然科学基金资助项目(50677045)。收稿日期 2008-11-21 改稿日期 2009-03-05