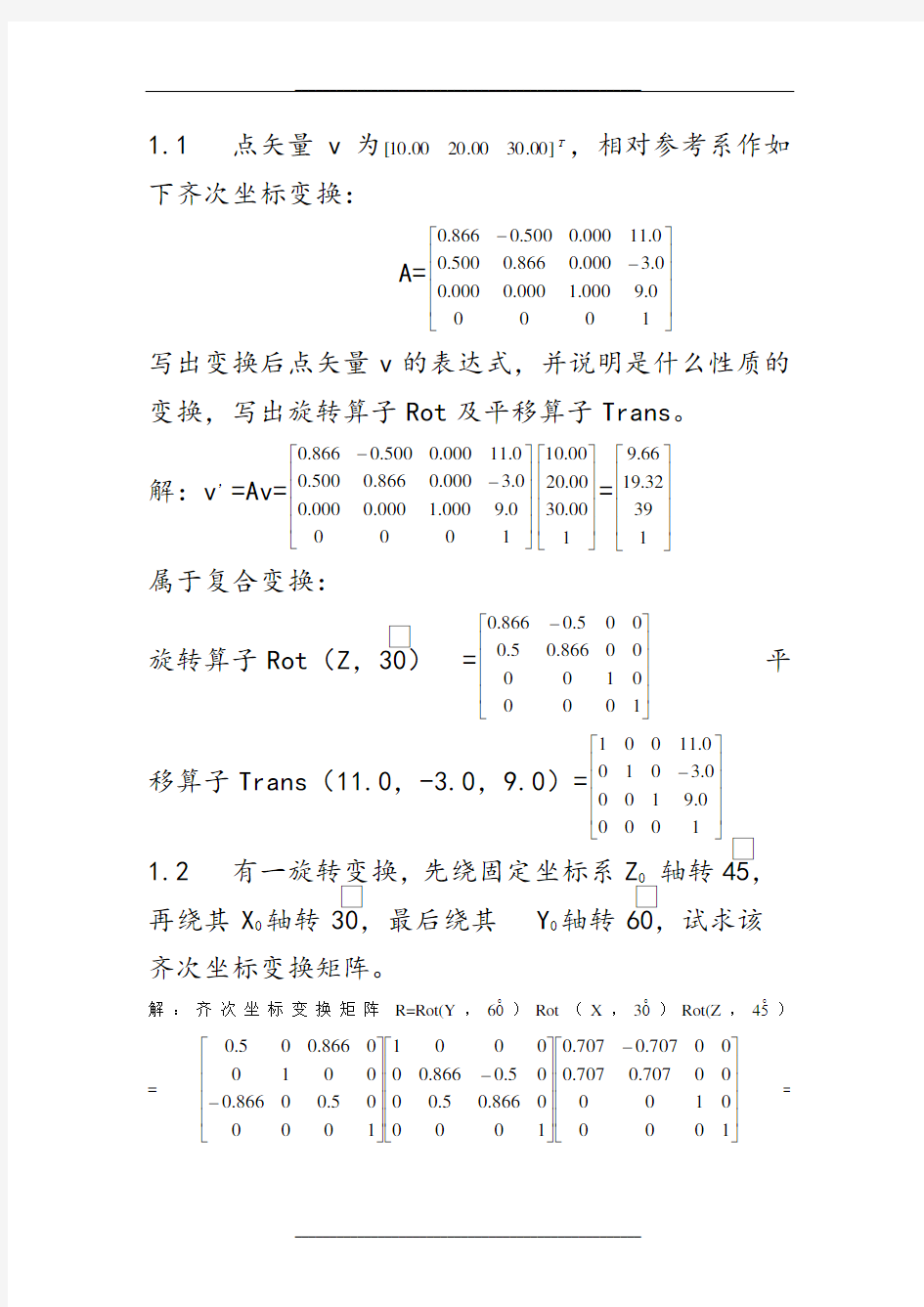

1.1 点矢量v 为]00.3000.2000.10[T ,相对参考系作如
下齐次坐标变换:
A=????
?
????
???--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。
解:v ,
=Av=?????????
???--1000
0.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0????????????100.3000.2000.10=?
?????
??????13932.1966.9 属于复合变换: 旋转算子
Rot (Z ,30?)=??
???
?
?
??
???-1000
010000866
.05.0005
.0866.0 平移算子
Trans (11.0,-3.0,9.0)=?
?
???
????
???-1000
0.91000.3010
0.11001 1.2 有一旋转变换,先绕固定坐标系Z 0 轴转45?,再绕其X 0轴转30?,最后绕其Y 0轴转60?,试求该齐次坐标变换矩阵。
解:齐次坐标变换矩阵R=Rot(Y ,60?)Rot (X ,30?)Rot(Z ,45?)
=
??
???
?
??????-???????
??
???-?????????
???-1000010000707.0707.000707
.0707.010000866
.05.0005.0866.0000
01100005.00866.000100866.005.0=
?????
?
?
??
???----10000433.0436.0436.005.0612.0612.00750.0047.0660.0 1.3 坐标系{B}起初与固定坐标系{O}相重合,现坐标系{B}绕Z B 旋转30?,然后绕旋转后的动坐标系的X B 轴旋转45?,试写出该坐标系{B}的起始矩阵表达式和最后矩阵表达式。
解:起始矩阵:B=O=?
?
???
????
???100001000010
0001 最后矩阵:B′=Rot(Z ,30?)B Rot (X ,45?)=?????
?
?
??
???--10000707.0707.000612
.0612.05.000353
.0866.0 1.5 写出齐次变换阵H A
B ,它表示坐标系{B}连续相对固定坐标系{A}作以下变换:
(1)绕A Z 轴旋转90?。 (2)绕A X 轴旋转-90?。 (3)移动[]T
973。
解:
H A
B
=Trans (3,7,9)Rot (X ,-90?)Rot (Z ,90?)
=?
?
?????
??
???-???????
??
???-????????????100
0010
00001001
01000001
00100000
11000910070103001=??
???
??
??
???-?????????
???-100
0010
00001001
0100
0901********
1=?????
??
??
???--100
0900171003010 1.6 写出齐次变换矩阵H B
B ,它表示坐标系{B}连续相对自身运动坐标系{B}作以下变换:
(1)移动[]T
973。
(2)绕B X 轴旋转90?。.
(3)绕B Z 轴转-90?。.
H B B
=Trans (3,7,9)Rot (X ,90?)Rot (Z ,90?)=
?
?
???
??
??
???-???????
??
???-????????????10000100
0001001010000010
010000
1
1000910070103001=
?
?
???
?
?
??
???--=???????
??
???-????????????-1000
9001
710030
1
10000100
000100101000
9010710030
1
1.8 如题1.8图所示的二自由度平面机械手,关节1为转动关节,关节变量为θ1;关节2为移动关节, 关节变量为d 2。试:
(1)建立关节坐标系,并写出该机械手的运动方程式。 (2)按下列关节变量参数求出手部中心的位置值。
解:建立如图所示的坐标系 参数和关节变量
连杆 θ α а d 1
θ1 0 0 0 2
d 2
θ1 0 30 60 90 d 2/m
0.50
0.80
1.00
0.70
?
?
??????????-==1000
00000000),(11
1111θθ
θθθC S S C Z Rot A ?
?
???
?
??????==100001000010001
)0,0,(222d d Trans A 机械手的运动方程式:
=?=2
12A A T ?
?
???
?
?
?????-1000
0100sin 0cos sin cos 0sin cos 12111211θθθθθθd d 当θ1=0 , d 2=0.5时:
手部中心位置值?
?
???
????
???=1000
00000010
5.0001
B 当θ1=30 , d 2=0.8时
手部中心位置值 ?
????
??
??
???-=1000
00004.00866.05.0433.005.0866.0B
当θ1=60 , d 2=1.0时
手部中心位置值?
?
???
?
?
??
???-=1000
0000866.005
.0866.05.00866
.05.0B 当θ1=90 , d 2=0.7时
手部中心位置值??
???
??
??
???-=100
000007.000
100
1
0B 1.11 题1.11图所示为一个二自由度的机械手,两连杆长度均为1m ,试建立各杆件坐标系,
求出1A ,2A 的变换矩阵。
解:建立如图所示的坐标系 连杆 θ α а d 1
1θ
1 0 0 2
2θ-
1
A 1=Rot(Z , θ1) Trans(1,0,0) Rot(X , 0o)=??
???
????
???-100
01000cos sin 0sin cos 11
1
111θθθ
θθθs c A 2= Rot(Z , -θ2)Trans(l, 0, 0)Rot(X , 90o)?????
????
???-=10
000000002
2
22θθθθc c s s 1.13 有一台如题1.13图所示的三自由度机械手的机构,各关节转角正向均由箭头所示方向指定,请标出各连杆的D-H 坐标系,然后求各变换矩阵1A ,2A ,3A 。 解:D-H 坐标系的建立
按D-H 方法建立各连杆坐标系 连杆 θ
α
a d
1
θ1
90?
1L +2L
1A =??
???
?
???
???+-10
0100cos 0sin 0
sin 0cos 211
1
11L L θθ
θθ 2A =?????????
???-1000
0100sin 0cos sin cos 0sin cos
23222322θθθθθθL L 3A =?
?
???
??
?????-1000
010
0sin 0cos
sin cos 0sin cos
343
33433θθθθθθL L
(二)简答题 1.智能机器人的所谓智能的表现形式是什么? 答:推理判断、记忆 2.机器人分为几类? 答:首先,机器人按应用分类可分为工业机器人、极限机器人、娱乐机器人。 1)工业机器人有搬运、焊接、装配、喷漆、检验机器人,主要用于现代化的工厂和柔性加工系统中。 2)极限机器人主要是指用在人们难以进入的核电站、海底、宇宙空间进行作业的机器人,包括建筑、农业机器人。 3)娱乐机器人包括弹奏机器人、舞蹈机器人、玩具机器人等。也有根据环境而改变动作的机器人。 其次,按照控制方式机器人可分为操作机器人、程序机器人、示教机器人、智能机器人和综合机器人。 3. 机器人由哪几部分组成? 机器人由三大部分六个子系统组成。三大部分是机械部分、传感部分和控制部分。六个子系统是驱动系统、机械结构系统、感受系统、机器人一环境交换系统、人机交换系统和控制系统。 4. 什么是自由度? 答:人们把构建相对于参考系具有的独立运动参数的数目称为自由度。 5. 机器人技术参数有哪些?各参数的意义是什么? 答:机器人技术参数有:自由度、精度、工作范围、速度、承载能力 1)自由度:是指机器人所具有的独立坐标轴的数目,不包括手爪(末端操作器)的开合自由度。在三维空间里描述一个物体的位置和姿态需要六个自由度。但是,工业机器人的自由度是根据其用途而设计的,也可能小于六个自由度,也可能大于六个自由度。
2)精度:工业机器人的精度是指定位精度和重复定位精度。定位精度是指机器人手部实际到达位置与目标位置之间的差异。重复定位精度是指机器人重复定位其手部于同一目标位置的能力,可以用标准偏差这个统计量来表示,它是衡量一列误差值的密集度(即重复度)。 3)工作范围:是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。 4)速度;速度和加速度是表明机器人运动特性的主要指标。 5)承载能力:是指机器人在工作范围内的任何位姿上所能承受的最大质量。承载能力不仅取决于负载的质量,而且还与机器人运行的速度和加速度的大小和方向有关。为了安全起见,承载能力这一技术指标是指高速运行时的承载能力。通常,承载能力不仅指负载,而且还包括机器人末端操作器的质量。 6. 机器人手腕有几种?试述每种手腕结构。 答:机器人的手臂按结构形式分可分为单臂式,双臂式及悬挂式按手臂的运动形式区分,手臂有直线运动的。如手臂的伸缩,升降及横向移动,有回转运动的如手臂的左右回转上下摆动有复合运动如直线运动和回转运动的组合。2直线运动的组合2回转运动的组合。手臂回转运动机构,实现机器人手臂回转运动的机构形式是多种多样的,常用的有叶片是回转缸,齿轮转动机构,链轮传动和连杆机构手臂俯仰运动机构,一般采用活塞油(气)缸与连杆机构联用来实现手臂复合运动机构,多数用于动作程度固定不变的专用机器人。 7. 机器人机座有几种?试述每种机座结构。 答:机器人几座有固定式和行走时2种 1)固定式机器人的级左右直接接地地面基础上,也可以固定在机身上 2)移动式机器人有可分为轮车机器人,有3组轮子组成的轮系四轮机器人三角论系统,全方位移动机器人,2足步行式机器人,履带行走机器人 8. 试述机器人视觉的结构及工作原理 答:机器人视觉由视觉传感器摄像机和光源控制计算器和图像处理机组成原理:由视觉传感器讲景物的光信号转换成电信号经过A/D转换成数字信号传递给图像处理器,同时光源控制器和32 摄像机控制器把把光线,距离颜色光源方向等等参数传递给图像处理器,图像处理器对图像数据做一些简单的处理将数据传递给计算机最后由计算器存储和处理。 9. 工业机器人控制方式有几种?
一.简答:(50分) 1.什么是色散波和非色散波?(5分) 答:有的波型如TE 波和TM 波,当波导的形状、尺寸和所填充的介质给定时,对于传输某一波形的电磁波而言,其相速v p 和群速v g 都随频率而变化的,把具有这种特性的波型称为色散波。而TEM 波的相速v p 和群速v g 与频率无关,把具有这种特性的波型称为非色散波。 2.矩形波导、圆波导和同轴线分别传输的是什么类型的波?(5分) 答:(1)矩形波导为单导体的金属管,根据边界条件波导中不可能传输TEM 波,只能传输TE 波和TM 波。 (2)圆波导是横截面为圆形的空心金属管,其电磁波传输特性类似于矩形波导不可能传输TEM 波,只能传输TE 波和TM 波。 (3)同轴线是一种双导体传输线。它既可传输TEM 波,也可传输TE 波和TM 波。 3.什么是TE 波、TM 波和TEM 波?(5分) 答:根据导波系统中电磁波按纵向场分量的有无,可分为三种波型: (1)横磁波(TM 波),又称电波(E 波):0=H Z ,0≠E Z ; (2)横电波(TE 波),又称磁波(H 波):0=E Z ,0≠H Z ; (3)横电磁波(TEM ):0=E Z ,0=H Z 。 4.导波系统中的相速和相波长的含义是什么?(5分) 答:相速v p 是指导波系统中传输电磁波的等相位面沿轴向移动的速度。 相波长λp 是指等相位面在一个周期T 内移动的距离。 5.为什么多节阶梯阻抗变换器比单节阻抗变换器的工作频带要宽?(5分) 答:以两节阶梯阻抗变换器为例,设每节4 λ阻抗变换器长度为θ,三个阶
梯突变的电压反射系数分别为 Γ ΓΓ2 1 ,,则点反射系数为 e e U U j j i r θ θ 42210--ΓΓΓ++==Γ,式中说明,当采用单节变换器时只有两 个阶梯突变面,反射系数Γ的表达式中只有前两项,若取ΓΓ=10,在中心频率处,2/πθ=这两项的和为零,即两突变面处的反射波在输入端相互抵消,从而获得匹配;但偏离中心频率时,因2/πθ≠,则两个反射波不能完全抵消。然而在多节阶梯的情况下,由于多节突变面数目增多,参与抵消作用的反射波数量也增多,在允许的最大反射系数容量Γm 相同的条件下, 使工作频带增宽。 6.请简述双分支匹配器实现阻抗匹配的原理。(7分) 答: B A Z L 如图设:AA’,BB’两个参考面分别跨接两个短截线,归一化电纳为jB 1,jB 2 A A’,BB’两参考面处的等效导纳,在考虑分支线之前和之后分别为 y iA ',y A A '' y iB ',y B B ' ' ,从负载端说起,首先根据负载导纳在导纳圆图上找 到表示归一化负载导纳的点,以此点到坐标原点的距离为半径,以坐标原点为圆心画等反射系数圆,沿此圆周将该点顺时针旋转(4πd 1)rad ,
数字电子技术基础期末考试试卷 课程名称 数字电子技术基础 A 卷 考试形式 闭 卷 考核类型 考试 本试卷共 4 大题,卷面满分100分,答题时间120分钟。 一、填空题:(每小题2分,共10分) 1.二进制数(1011.1001)2转换为八进制数为 (13.41) ,转换为十六进为 B9 。 2.数字电路按照是否具有记忆功能通常可分为两类: 组合逻逻辑电路 、 时序逻辑电路 。 3.已知逻辑函数F =A ⊕B ,它的与非-与非表达式为 ,或与非表达式 为 。 4.5个变量可构成 32 个最小项,变量的每一种取值可使 1 个最小项的值为1。 5.555定时器构成的施密特触发器,若电源电压V CC =12V ,电压控制端经0.01μF 电容接地,则上触发电平U T+ = V ,下触发电平U T –= V 。 二、化简题:(每小题10分,共20分) 1.用代数法将下面的函数化为最简与或式:F=C ·[ABD BC BD A +++(B+C)D]
2. 用卡诺图法将下列函数化简为最简与或式: F(A 、B 、C 、D)=∑m (0,2,4,5,7,13)+∑d(8,9,10,11,14,15) 三、分析题:(每小题10分,共40分) 1.试分析题1图所示逻辑电路,写出逻辑表达式和真值表,表达式化简后再画出新的逻辑图。 题 1图 得分 评卷人
2.74161组成的电路如题 2 图所示,分析电路,并回答以下问题: (1)画出电路的状态转换图(Q 3Q 2Q 1Q 0); (2)说出电路的功能。(74161的功能见表) 题 2 图 …………………密……………………封…………………………装…………………订………………………线………………………
西南大学网络与继续教育学院课程考试试卷 专业:机电一体化技术2014年8月 课程名称【编号】:工业机器人【0941】B卷 闭 / 开卷闭卷考试时间:80分钟满分:100分 答案必须做在答题卷上,做在试卷上不予记分。 一、填空(每空 1.5 分,共 18 分) ( 1)机器人是(指代替原来由人直接或间接作业的自动化机械)(第一章学习单元1) ( 2)在定的直角坐系{A} 中,空任一点P 的位置可用的位置矢量 A P表示,其 左上 A 代表定的参考坐系,P x P y P z是点P在坐系{A}中的三个位置坐 分量。(第二章学元1) 答: 3×1 (3)次坐的表示不是的,我将其各元素同乘一非零因子后,仍然代表同一点。 (第二章学元1) 答:唯一。 (4)斯坦福机器人的手臂有关,且两个关的相交于一点,一个移关,共三个自由度。 (第二章学元 5) 答:两个。 ( 5)在θ和d出后,可以算出斯坦福机器人手部坐系{6} 的和姿n、o、a, 就是斯坦福机器人手部位姿的解,个求解程叫做斯坦福机器人运学正解。(第二章学元 5) 答:位置 p。 ( 6)若定了体上和体在空的姿,个体在空上是完全确定的。 (第二章学元1) 答:某一点的位置。 ( 7)机器人运学逆解的求解主要存在三个:逆解可能不存在、和求解方法的多性。(第二章学元6) 答:逆解的多重性 ( 8)机器人逆运学求解有多种方法,一般分两:封解和。(第二章学元 6) 答:数解(9)“角度定法”就是采用相参考坐系或相运坐系作三次来定姿的 方法。和欧拉角法、 RPY 角法是角度定法中常用的方法。(第二章学元7)答: (10)在工机器人速度分析和以后的静力学分析中都将遇到似的雅可比矩,我称 之工机器人雅可比矩,或称雅可比,一般用符号表示。(第三章学元 1)答:J 。之的关系且 dX 此表示微小位移。 J 反映了关空微小运 dθ与 (11) (第三章学元 1) 答:手部作空微小位移 dX 。 (12)于n个自由度的工机器人,其关量可以用广关量q 表示;当关 关, qi= di,当关移关, qi=di, dq=[dq1 dq2 ? dqn]T,反映了关 空的。(第三章学元 1) 答:微小运。 二、名解(每 3 分,共 6 分) 1、柔性手(第四章学习单元1) 可对不同外形物体实施抓取,并使物体表面受力比较均匀的机器人手部结构。 2、制动器失效抱闸(第四章学习单元1) 指要放松制动器就必须接通电源,否则,各关节不能产生相对运动。 三、答(每 6 分,共 36 分) 1、简述脉冲回波式超声波传感器的工作原理。(第五章学习单元3) 在脉冲回波式中,先将超声波用脉冲调制后发射,根据经被测物体反射回来的回波延迟时间 t,计算出被测物体的距离R,假设空气中的声速为v,则被测物与传感器间的距离R 为:如果空气温度为T(℃ ),则声速v 可由下式求得: 2、机器人视觉的硬件系统由哪些部分组成?(第五章学习单元9) (1)景物和距离传感器,常用的有摄像机、CCD图像传感器、超声波传感器和结构光设备等; (2)视频信号数字化设备,其任务是把摄像机或者 CCD输出的信号转换成方便计算和分析的数 字信号; (3) 视频信号处理器,视频信号实时、快速、并行算法的硬件实现设备:如DSP系统; (4)计算机及其设备,根据系统的需要可以选用不同的计算机及其外设来满足机器人视觉信息 处理及其机器人控制的需要; (5)机器人或机械手及其控制器。 3、为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?(第五章学习单元9) 预处理的主要目的是清楚原始图像中各种噪声等无用的信息,改进图像的质量,增强兴趣的有用信息的可检测性。从而使得后面的分割、特征抽取和识别处理得以简化,并提高其可靠性。机器视觉常用的预处理包括去噪、灰度变换和锐化等。 4、为什么我们说步进电动机是是位置控制中不可缺少的执行装置?他有什么优缺点?(第六章学习单元 6) 因为可以对数字信号直接进行控制,能够很容易地与微型计算机相连接,不需要反馈控制, 电路简单,容易用微型计算机控制,且停止时能保持转矩,维护也比较方便,但工作效率低, 容易引起失歩,有时也有振荡现象产生。
4-1 谐振腔有哪些主要的参量?这些参量与低频集总参数谐振回路有何异同点? 答:谐振腔的主要特性参数有谐振频率、品质因数以及与谐振腔中有功损耗有关的谐振电导,对于一个谐振腔来说,这些参数是对于某一个谐振模式而言的,若模式不同,这些参数也是不同的。谐振频率具有多谐性,与低频中的回路,当其尺寸、填充介质均不变化时,只有一个谐振频率是不相同的。在谐振回路中,微波谐振腔的固有品质因数要比集总参数的低频谐振回路高的多。一般谐振腔可以等效为集总参数谐振回路的形式。 4-2 何谓固有品质因数、有载品质因数?它们之间有何关系? 答:固有品质因数是对一个孤立的谐振腔而言的,或者说,是谐振腔不与任何外电路相连接(空载)时的品质因数。当谐振腔处于稳定的谐振状态时,固有品质因数0Q 的定义为 02T W Q W π =,其中W 是谐振腔内总的储存能量,T W 是一周期内谐振腔内损耗的能量。 有载品质因数是指由于一个腔体总是要通过孔、环或探针等耦合机构与外界发生能量的耦合,这样不仅使腔的固有谐振频率发生了变化,而且还额外地增加了腔的功率损耗,从而导致品质因数下降,这种考虑了外界负载作用情况下的腔体的品质因数称为有载品质因数l Q 。 对于一个腔体,0 1l Q Q k = +,其中k 为腔体和外界负载之间的耦合系数。 4-4 考虑下图所示的有载RLC 谐振电路。计算其谐振频率、无载Q 0和有载Q L 。 谐振器 负载 1800Ω 解:此谐振电路属于并联谐振电路,其谐振频率为: 0356f MHz = = = 无载时, 017.9R Q w L = === 有载时, 040.25L e R Q w L = ===
1.微波通常是指波长在1~0.001米之间,频率在300MHz ~300GHz Hz之间的电磁波。按我国标准,家用微波炉所用微波频率为2450兆赫兹。“蓝牙”使用的微波频段在 2.4GHz附近。工业加热用微波频率为900兆赫兹。 2.微带线中传输的工作主模不是真正的TEM波,而是准TEM波,这 种模式的主要特点是Hz和Ez都不为零,未加屏蔽时,其损耗包括介质损耗、欧姆损耗和辐射损耗三部分。 3.微波系统的负载发生全反射时,负载的反射系数为1,从信号源输入 的有效功率全部从负载反射回来,此时,从信号源输出端参考面看向负载,参考面上的回波损耗RL=0 dB。 4.传输线上若导波波长为λg,则传输线上相隔λg/4的点,其阻 抗呈倒数,相隔λg/2的点,其阻抗相等。 5.N口微波网络散射矩阵[S ii]的元素S ii的物理意义为:i口接电源, 其余端口接匹配负载时i口的电压反射系数,元素S ij的物理意义为:j口接电源,其余端口接匹配负载时,从j口到i口的电压传输系数。 6.任何均匀传输系统传播的电磁波可分为三种,其中波导不能传输的 波型为TEM波。 7.圆柱形波导中还有一种与矩形波导中不同形式的模式简并现象,称 为极化简并。 8.写出两种常见的微波双口网络:放大器、滤波器;两种常 见的微波单口网络:负载、信号源。 9.从物理概念上分,模式激励可分为电场激励和磁场激励; 常见的模式激励装置有探针激励装置、耦合环激励装置、孔/缝激
励装置和直接耦合装置。 10. 同轴线的内导体半径为a ,外导体的内半径为b ,内外导体之间填 充有介质(?,μ),则同轴线上单位长度的电容为)a /b ln(C πε2= 单位长度的电感为)a /b ln(L πμ2=同轴线的特性阻抗为π εμ20)a /b ln(Z =若该同轴线拟用于宽带微弱微波信号的传送,b 与a 之比应为 3.59 若该同轴线拟用于窄带大功率微波信号的传送,b 与a 之比应为 1.65 ;实际工程中为兼顾这两种情况,通常的同轴线特性阻抗为 50 欧。同轴线单位长度的电容、电感与同轴线的参数.c a b 有关 11. 圆柱形谐振腔中,壁电流只有沿φ方向的电流的谐振模式是 TE 011 ,其Q 0值较其他模式高。 12. 全反射时,Γ=1,从信号源来的有效功率全部从负载反射回来, 此时回波损耗RL=0 dB 13. 阻抗匹配的方式主要有: 1负载阻抗匹配 2信号源阻抗匹配 3 信号源共轭匹配。 14. 圆柱形波导中还有一种与矩形波导中不同形式的简并现象,称为 极化 简并。 15. 终端短路的传输线的驻波系数是∞,负载处的反射系数是 - 1 。 终端开路的传输线的驻波系数是∞,负载处的反射系数是 + 1 16. 扁波导宽边a 和窄边b 的关系为 b=(0.10.2)a 标准波导宽边a 和窄边 b 的关系为 b=0.5a 17. TM 波的定义为Ez ≠0 而Hz=0的波称为横磁波 TE 波的定义为Hz ≠0 而Ez=0的波称为横电波
Q 1 CP Q 1 Q 0 &&D 1D 0第一组: 计算题 一、(本题20分) 试写出图示逻辑电路的逻辑表达式,并化为最简与或式。 解:C B A B A F ++=C B A B A F ++= 二、(本题25分) 时序逻辑电路如图所示,已知初始状态Q 1Q 0=00。 (1)试写出各触发器的驱动方程; (2)列出状态转换顺序表; (3)说明电路的功能; 解:(1)100Q Q D =,101Q Q D =; (2)00→10→01 (3)三进制移位计数器
三、(本题30分) 由集成定时器555组成的电路如图所示,已知:R 1=R 2=10 k Ω,C =5μF 。 (1)说明电路的功能; (2)计算电路的周期和频率。 解:(1)多谐振荡器电路 (2)T 1=7s , T 2=3.5s 四、(本题25分) 用二进制计算器74LS161和8选1数据选择器连接的电路如图所示, (1)试列出74LS161的状态表; (2)指出是几进制计数器; (3)写出输出Z 的序列。 "1" 解: (1)状态表如图所示 (2)十进制计数器 C R R CC u o
(3)输出Z的序列是0010001100 第二组: 计算题 一、(本题20分) 逻辑电路如图所示,试答:1、写出逻辑式并转换为最简与或表达式,2、画出用“与”门及“或”门实现的逻辑图。 B 二、(本题25分) 试用与非门设计一个三人表决组合逻辑电路(输入为A、B、C,输出为F),要求在A有一票决定权的前提下遵照少数服从多数原则,即满足:1、A=1时,F一定等于1,2、A、B、C中有两2个以上等于1,则输出F=1。 试:(1)写出表决电路的真值表; (2)写出表决电路的逻辑表达式并化简; (3)画出用与非门设计的逻辑电路图。
2-1 波导为什么不能传输TEM 波? 答:一个波导系统若能传输TEM 波型,则在该系统中必须能够存在静电荷静电核或恒定电流,而在单导体所构成的空心金属波导馆内,不可能存在静电荷或恒定电流,因此也不可能传输TEM 波型。 2-2 什么叫波型?有哪几种波型? 答:波型是指每一种能够单独地在规则波导中存在的电磁场的一种分布状态。 根据场的横向分量与纵向分量之间的关系式划分波型,主要有三种: TEM 波(0z E =,0z H =),TE 波(0z E =,0z H ≠),TM 波(0z E ≠,0z H =) 2-3 何谓TEM 波,TE 波和TM 波?其波阻抗和自由空间波阻抗有什么关系? 答:0z E =,0z H =的为TEM 波;0z E =,0z H ≠为TE 波;0z E ≠,0z H =为TM 波。 TE 波阻抗: x TE y E wu Z H ηβ = ==> TM 波阻抗: x TM y E Z H w βηε= == 其中η为TEM 波在无限答煤质中的波阻抗。 2-4 试将关系式y z x H H jw E y z ε??-=??,推导为1()z x y H E j H jw y βε?=+?。 解:由y H 的场分量关系式0j z y H H e β-=(0H 与z 无关)得: y y H j H z β?=-? 利用关系式y z x H H jw E y z ε??-=??可推出: 11()()y z z x y H H H E j H jw y z jw y βεε???= +=+??? 2-5 波导的传输特性是指哪些参量? 答:传输特性是指传输条件、传播常数、传播速度、波导波长、波形阻抗、传输功率以及损耗和衰减等。 2-6 何为波导的截止波长c λ?当工作波长λ大于或小于c λ时,波导内的电磁波的特性有何
全国青少年机器人技术等级考试 二级模拟试题 下列人物中,哪位发明了电灯? A.牛顿 B.熊大 C.爱迪生 D.爱因斯坦 题型:单选题 答案:C 分数:1 首届机器人世界杯足球赛在哪里举办? A.日本 B.荷兰 C.美国 D.意大利 题型:单选题 答案:A 分数:1 机器人控制系统从基本原理和系统结构上可以分成哪两类? A.非伺服型系统和伺服型系统。 B. Windows系统和苹果系统。 C.非仿真型系统和非仿真型系统。 D.大系统和小系统。 题型:单选题 答案:A 分数:1 下列说法正确的是? A.凸轮机构一般有凸轮、从动件和机架三个构件组成。 B.凸轮机构一般有凸轮、主动从件和机架三个构件组成。 C.凸轮机构一般有凸轮、从动件和主动件三个构件组成。 D.凸轮机构一般有圆轮、从动件和主动件三个构件组成。 题型:单选题 答案:A 分数:1 下列事物中,有曲柄装置的是? A.自行车 B.自动晾衣架 C.电视机 D.以上都有 题型:单选题 答案:A 分数:1
一个人在匀速直线行驶的火车里向上跳起,发现仍落回原地,这是因为? A.人跳起厚,车厢内空气推着他向前运动。 B.人跳起到落地时间过短,偏后的距离看不出来。 C.人跳起到落地,在水平方向上人与车有相同的速度。 D.人跳起瞬间,地板给人一个向前的力,推着他一起向前运动。 题型:单选题 答案:C 分数:1 在机器人历史上,被称为“工业机器人之父”的是? A.阿西莫夫 B.英格伯格 C.诺伯特 D.弗里茨 题型:单选题 答案:B 分数:1 下面哪个不是机器人系统的基本结构? A.机械本体 B.人 C.计算机控制系统 D.传感系统 题型:单选题 答案:B 分数:1 工业机器人出现是在()世纪。 A. 18 B. 19 C. 20 D. 21 题型:单选题 答案:C 分数:1 ()决定了从动件预定的运动规律。 A.凸轮转速 B.凸轮大小 C.凸轮轮廓曲线 D.凸轮形状 题型:单选题 答案:C 分数:1 一节普通干电池电压是多少伏? A. 0.8 B. 1.0 C. 1.5
1.北京理工大学 1999年程序设计试题资料下载 2.北京理工大学 2000年信号与系统试题资料下载 3.北京理工大学 1999年晶体管原理与制造试题资料下载 4.北京理工大学 1999年模拟与数字电路试题资料下载 5.北京理工大学 1999年信号与系统试题资料下载 6.北京理工大学 1999年微波技术基础试题资料下载 7.北京理工大学 2000年程序设计试题资料下载 8.北京理工大学 2000年晶体管原理与制造试题资料下载 9.北京理工大学 2000年模拟与数字电路试题资料下载 10.北京理工大学 2000年微波技术基础试题资料下载 11.北京理工大学 2002年半导体物理试题资料下载 12.北京理工大学 2001年信号与系统试题资料下载 13.北京理工大学 2003年半导体物理试题资料下载 14.北京理工大学 2004年会计学试题资料下载 15.北京理工大学 2001年半导体物理试题资料下载 16.北京理工大学 2002年政治经济学试题资料下载 17.北京理工大学 2002年管理信息系统试题资料下载 18.北京理工大学 2004年半导体物理试题资料下载 19.北京理工大学 2004年经济学试题资料下载 20.北京理工大学 2005年半导体物理试题资料下载 21.北京理工大学交通运输系统工程学2005试题资料下载 22.北京理工大学 2005无机化学(B)试题资料下载 23.北京理工大学 2004行政管理试题资料下载 24.北京理工大学人文社会科学学院 2003政治经济学试题资料下载 25.北京理工大学人文社会科学学院 2004年经济学试题资料下载 26.北京理工大学人文社会科学学院 2003年经济学基础试题资料下载 27.北京理工大学人文社会科学学院 2002年政治经济学试题资料下载 28.北京理工大学人文社会科学学院应用经济学2005试题资料下载 29.北京理工大学人文社会科学学院 2005经济学基础试题资料下载 30.北京理工大学人文社会科学学院基础英语2002试题资料下载 31.北京理工大学人文社会科学学院运筹学2001试题资料下载 32.北京理工大学人文社会科学学院日语2002试题资料下载 33.北京理工大学人文社会科学学院运筹学2002试题资料下载 34.北京理工大学人文社会科学学院运筹学2003试题资料下载 35.北京理工大学人文社会科学学院综合考试(英语国家文化概况、汉语) 2002试题资料下载 36.北京理工大学人文社会科学学院经济学2002试题资料下载 37.北京理工大学人文社会科学学院语言学和英美文学2002试题资料下载 38.北京理工大学人文社会科学学院运筹学2005试题资料下载 39.北京理工大学人文社会科学学院运筹学2004试题资料下载 40.北京理工大学企业管理2004试题资料下载 41.北京理工大学传感与测试技术2004试题资料下载 42.北京理工大学信号处理导论2003试题资料下载 43.北京理工大学信号处理导论2004试题资料下载
数字电子技术基础试题(一) 填空题: (每空1数字电子技术基础试题(一) 一、分,共10分) 1.(30.25) 10 = ( ) 2 = ( ) 16 。 2 . 逻辑函数L = + A+ B+ C +D = 1 。 3 . 三态门输出的三种状态分别为:、和。 4 . 主从型JK触发器的特性方程= 。 5 . 用4个触发器可以存储位二进制数。 6 . 存储容量为4K×8位的RAM存储器,其地址线为12 条、数据线为 8 条。 二、选择题:(选择一个正确的答案填入括号内,每题3分,共30分) 1.设下图中所有触发器的初始状态皆为0,找出图中触发器在时钟信号作用下,输出电压波形恒为0的是:(C )图。
2.下列几种TTL电路中,输出端可实现线与功能的电路是(D)。 A、或非门 B、与非门 C、异或门 D、OC门 3.对CMOS与非门电路,其多余输入端正确的处理方法是(D )。 A、通过大电阻接地(>1.5KΩ) B、悬空 C、通过小电阻接地(<1KΩ) B、D、通过电阻接V CC 4.图2所示电路为由555定时器构成的(A )。 A、施密特触发器 B、多谐振荡器 C、单稳态触发器 D、T触发器 5.请判断以下哪个电路不是时序逻辑电路(C )。 A、计数器 B、寄存器 C、译码器 D、触发器 6.下列几种A/D转换器中,转换速度最快的是(A )。 A、并行A/D转换器 B、计数型A/D转换器 C、逐次渐进型A/D转换器 B、D、双积分A/D转换器 7.某电路的输入波形u I 和输出波形u O 如下图所示,则该电路为(C)。 A、施密特触发器 B、反相器 C、单稳态触发器 D、JK触发器 8.要将方波脉冲的周期扩展10倍,可采用(C )。
2-1波导为什么不能传输 TEM 波? 答:一个波导系统若能传输 TEM 波型,则在该系统中必须能够存在静电荷静电核或恒定电 流,而在单导体所构成的空心金属波导馆内, 不可能存在静电荷或恒定电流, 因此也不可能 传输TEM 波型。 2-2什么叫波型?有哪几种波型? 答:波型是指每一种能够单独地在规则波导中存在的电磁场的一种分布状态。 根据场的横向分量与纵向分量之间的关系式划分波型,主要有三种: TEM 波(E z=O , H z=O ),TE 波(E z =O ,H z HO ),TM 波(Ez^O , H z = O ) 2-3何谓TEM 波,TE 波和TM 波?其波阻抗和自由空间波阻抗有什么关系? 答:E z =0,H z =0 的为 TEM 波;E z =O ,H z =O 为 TE 波;E z =0,H z =0 为 TM 波。 其中为TEM 波在无限答煤质中的波阻抗。 cH z £H y 唏戸亠 1 cH z R 2-4试将关系式 z y =jw ;E x ,推导为E x ( —j :Hy )。 cy az jw g £y 解:由H y 的场分量关系式 H y =H O e —j :z ( H 0 与z 无关)得: 利用关系式凹一也二jw ;E x 可推出: 纽 cz 2-5波导的传输特性是指哪些参量? 答:传输特性是指传输条件、传播常数、传播速度、波导波长、波形阻抗、传输功率以及损 耗和衰减 等。 2-6何为波导的截止波长 ’c ?当工作波长’大于或小于’c 时,波导内的电磁波的特性有何 TE 波阻抗: TM 波阻抗: 2 丄(如土) jw ; : y : z jw ; /H y )
《工业机器人》复习题 一、判断题 1.机械手亦可称之为机器人。(Y) 2.完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。(Y) 3.关节空间是由全部关节参数构成的。(Y) 4.任何复杂的运动都可以分解为由多个平移和绕轴转动的简单运动的合成。(Y) 5.关节i的坐标系放在i-1关节的末端。(N) 6.手臂解有解的必要条件是串联关节链中的自由度数等于或小于6。(N) 7.对于具有外力作用的非保守机械系统,其拉格朗日动力函数L可定义为系统总 动能与系统总势能之和。(N) 8.由电阻应变片组成电桥可以构成测量重量的传感器。(Y) 9.激光测距仪可以进行散装物料重量的检测。(Y) 10.运动控制的电子齿轮模式是一种主动轴与从动轴保持一种灵活传动比的随动系 统。(Y) 11.工业机器人工作站是由一台或两台机器人所构成的生产体系。() 12.机器人分辨率分为编程分辨率与控制分辨率,统称为系统分辨率。() 13.正交变换矩阵R为正交矩阵。() 14.复合运动齐次矩阵的建立是由全部简单运动齐次矩阵求和所形成的。() 15.关节i的效应表现在i 关节的末端。() 16.并联关节机器人的正运动学问题求解易,逆运动学问题求解难。() 17.机器人轨迹泛指工业机器人在运动过程中所走过的路径。() 18.空间直线插补是在已知该直线始点、末点和中点的位置和姿态的条件下,进而 求出轨迹上各点(插补点)的位置和姿态。() 19.示教编程用于示教-再现型机器人中。(Y) 20.机器人轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点的位移、速度 和加速度。(Y)
21.关节型机器人主要由立柱、前臂和后臂组成。(N) 22.到目前为止,机器人已发展到第四代。(N) 23.磁力吸盘能够吸住所有金属材料制成的工件。(N) 24.谐波减速机的名称来源是因为刚轮齿圈上任一点的径向位移呈近似于余弦波形 的变化。(N) 25.由电阻应变片组成电桥可以构成测量重量的传感器。(Y) 26.激光测距仪可以进行散装物料重量的检测。(Y) 27.机械手亦可称之为机器人。(Y) 28.谐波减速机的名称来源是因为刚轮齿圈上任一点的径向位移呈近似于余弦波形 的变化。(N) 29.借助于电磁波和声波可以构成接触型传感器。() 30.增量式编码器比起绝对式编码器加工难、安装严、体积大、价格高。() 31.计算机视觉学科中绝大多数问题为病态问题,既难以求解或解不唯一。() 32.示教-再现控制的给定方式中分直接示教和间接示教。直接示教便是操作人员 通过手动控制盒上的按键,编制机器人的动作顺序,确定位置、设定速度或限时。() 33.东大牛机器人足球队是中国第一支夺得世界杯冠军的代表队,填补了国空白。 () 34.图像恢复指是的光学镜头几何形变的矫正,补偿由于光学镜头所带来的图像畸 变。() 35.变位机的运动数(自由度)主要取决于被加工件的大小。() 36.轨迹插补运算是伴随着轨迹控制过程一步步完成的,而不是在得到示教点之 后,一次完成,再提交给再现过程的。(Y) 37.格林(格雷)码被大量用在相对光轴编码器中。(N) 38.图像二值化处理便是将图像中感兴趣的部分置1,背景部分置2。(N) 39.图像增强是调整图像的色度、亮度、饱和度、对比度和分辨率,使得图像效果
3-1 一根以聚四氟乙烯 2.10r ε=为填充介质的带状线,已知其厚度b =5mm ,金属导带厚度和宽度分别为0t =、W =2mm ,求此带状线的特性阻抗及其不出现高次模式的最高频率。 解: 由于/2/50.40.35W b ==>,由公式 20 (0.35/)e W W b b W b ?=-? -? /0.35/0.35 W b W b <> 得中心导带的有效宽度为:2e W W mm ≈=, 077.3Z = =Ω 带状线的主模为TEM 模,但若尺寸不对也会引起高次模,为抑止高次模,带状线的最短工作波长应满足: 10 10 max(,)cTE cTM λλλ> 10 2 5.8cTE mm λ== mm b r cTM 5.14210 ==ελ 所以它的工作最高频率 GHz c f 20105.141033 8 =??==-λ 3-2 对于特性阻抗为50Ω的铜导体带状线,介质厚度b =0.32cm ,有效相对介电常数 2.20r ε=,求线的宽度W 。若介质的损耗角正切为0.001,工作频率为10GHz ,计算单位 为dB/λ的衰减,假定导体的厚度为t =0.01mm 。 解: 074.2120==< 和030)0.4410.830x π=-=,所以 由公式 00, 1200.85120 x W b ??? 其中, 0.441x = 计算宽度为(0.32)(0.830)0.266W bx cm ===。 在10GHz ,波数为
1310.6k m -= = 由公式 )(/2tan 波TEM m Np k d δ α= 介电衰减为 m Np k d /155.02)001.0)(6.310(2tan === δα 在10GHz 下铜的表面电阻为0.026s R =Ω。于是,根据公式 300002.710120 ,30()/0.16120,s r c s R Z A b t Np m R B Z b επα-????? 其中 2121ln()W b t b t A b t b t t π+-=+ +-- 0.414141(0.5ln )(0.50.7)2b t W B W t W t ππ=+ +++ 得出的导体的衰减为 m Np A t b Z R r s c /122.0)(30107.203=-?=-πεα 因为 4.74A =。总的衰减常数为 0.277/d c Np m ααα=+= 以dB 为单位,为 ()201 2.41/dB ge dB m αα== 在10GHz ,在带状线上的波长为 cm f c r 02.2== ελ 所以,用波长来表示的衰减为 ()(2.41)(0.0202)0.049/dB dB αλ== 3-3 已知带状线两接地板间距b =6cm ,中心导带宽度W =2cm ,厚度t =0.55cm ,试求填充
数字电子技术基础知识总结引导语:数字电子技术基础知识有哪些呢?接下来是小编为你带来收集整理的文章,欢迎阅读! 处理模拟信号的电子电路。“模拟”二字主要指电压(或电流)对于真实信号成比例的再现。 其主要特点是: 1、函数的取值为无限多个; 2、当图像信息和声音信息改变时,信号的波形也改变,即模拟信号待传播的信息包含在它的波形之中(信息变化规律直接反映在模拟信号的幅度、频率和相位的变化上)。 3.初级模拟电路主要解决两个大的方面:1放大、2信号源。 4、模拟信号具有连续性。 用数字信号完成对数字量进行算术运算和逻辑运算的电路称为数字电路,或数字系统。由于它具有逻辑运算和逻辑处理功能,所以又称数字逻辑电路。 其主要特点是: 1、同时具有算术运算和逻辑运算功能 数字电路是以二进制逻辑代数为数学基础,使用二进制数字信号,既能进行算术运算又能方便地进行逻辑运算(与、或、非、判断、比较、处理等),因此极其适合于运算、比较、存储、传输、控制、决策等应用。
2、实现简单,系统可靠 以二进制作为基础的数字逻辑电路,可靠性较强。电源电压的小的波动对其没有影响,温度和工艺偏差对其工作的可靠性影响也比模拟电路小得多。 3、集成度高,功能实现容易 集成度高,体积小,功耗低是数字电路突出的优点之一。电路的设计、维修、维护灵活方便,随着集成电路技术的高速发展,数字逻辑电路的集成度越来越高,集成电路块的功能随着小规模集成电路(SSI)、中规模集成电路(MSI)、大规模集成电路(LSI)、超大规模集成电路(VLSI)的发展也从元件级、器件级、部件级、板卡级上升到系统级。电路的设计组成只需采用一些标准的集成电路块单元连接而成。对于非标准的特殊电路还可以使用可编程序逻辑阵列电路,通过编程的方法实现任意的逻辑功能。 模拟电路是处理模拟信号的电路;数字电路是处理数字信号的电路。 模拟信号是关于时间的函数,是一个连续变化的量,数字信号则是离散的量。因为所有的电子系统都是要以具体的电子器件,电子线路为载体的,在一个信号处理中,信号的采集,信号的恢复都是模拟信号,只有中间部分信号的处理是数字处理。具体的说模拟电路主要处理模拟信号,不随时间变化,时间域和值域上均连续的信号,如语音信号。而数
考试科目:机器人技术基础考试时间:120分钟试卷总分IQG分 题号■一--二二三四五六总分 得分 评卷 教师 一、简答题(本大题共3小题,每小题5分,总计15分) 1?示教再现式机器人 答:先由人驱动操作机,再以示教动作作业,将示教作业程序、位置及其他信息存储起来,然后让机器人重现这些动作。(5分) 2?机器人系统结构由哪几个部分组成 答:通常由四个相互作用的部分组成:机械手、环境、任务和控制器。 3?为了将圆柱形的零件放在平板上,机器人应具有几个自由度答:一共需要5个:定位3个,放平稳2个。(5分) (10分)下面的坐标系矩阵B移动距离d=(5 , 2, 6)T: Q 1 Q 2 1 Q Q 4 B = 0 0-16 .0 0 。 1 一 求该坐标系相对于参考坐标系的新位置。 解: (5分) -1 0 0 B neW = 0 1 0 0 0 1 .QQQ 5「0 1 0 21 2 1 0 0 4 6 0 0 -1 6 1 一 00 0 1 一(10 分) (10 分)求点P=(2, 3, 0 ~1 6 12 1 4)T绕X轴旋转45度后相对于参考坐标系的坐标。
第2页共4页 U T B ,已知: 求:工件相对于基座的描述 B T P 0 10-2 0 0-1-3 -10 0 -9 .0 0 0 1 六、(15分)写出3R 平面机械手的各连杆参数和运动学方程(末端相对于基件三臂长位 l 1 、 I 2 、 l 3 ) O 解:各连杆参数如下: 可^1 H 解:P=ROt (X,45) 3=0 久卫 -0.707 3 = -0.707 0.707 - 4_ I I 4.95 一 (10 分) 四、(15分)写出齐次变换矩阵 {A}作以下变换: 绕Z 轴转90o ;( b )再绕X 轴转-90o ;( C )最后做移动(3,7,9) 0 -1 0 3 解:AT = 0 0 1 7 -1 0 0 9 - 0 0 1 (15 分) {u}的描述为U T P ,机器人基座相对于参考系的描述为 - 0 1 0 -H U TP = 0 0 -1 2 -1 0 0 0 - 0 1 一 - 1 0 0 们 ,U TB = 0 1 0 5 0 0 1 9 [ 0 0 0 1 一 解: B B U U -1 u T P = T U T P =[ T B ] T P [1 0 0 -1「0 1 1 0 -5 0 0 -1 2 0 I 0 1 -9 —1 0 0 0 0 0 1 一 0 0 0 1 一 (10 分) (5分) 0 0.707 0.707 0 Pl - 2 B T ,它表示相对固定坐标系 (a 五、(15分)设工件相对于参考系
学号:姓名: 1. 简述工业机器人的定义和分类方法 P5:工业机器人是在工业中使用的机器人的机器人总称,主要用于完成工业生产者中的某些作业,根据具体应用目的的不同,又常常以其主要用途命名——焊接机器人;装配机器人;喷涂机器人;搬运、上下料、码垛机器人;其他用途机器人等。 2. 已知A坐标空间一点A P = 3i + 4j -5k,若对该点作如下坐标变换: Trans (-1, 2, 3 ) Rot (x, 90o) Rot (z, 45o) 试求出变换后该点在原坐标的位置,并绘制出变换图。 Trans (-1, 2, 3 )——平移变换 Trans(ΔX,ΔY,ΔZ)== Rot (x, 90o) ——旋转变换,绕X转90° Rot (x, θ)= Rot(x, 90o) = Rot (z, 45o)——旋转变换,绕Z转45° Rot (z, θ)= Rot (z, 45o) = A'= Trans (-1, 2, 3 ) Rot (x, 90o) Rot (z, 45o)A= =
3. PUMA250工业机器人结构及连杆参数如图1及表1所示。(1)根据图1及表1,设置并画出各连杆坐标; (2)求出各连杆的齐次变换矩阵A i (i=1,2…,6); (3)求出该机械手的运动学方程。 表1 PUMA250连杆参数 连杆关节变量α a d 1 θ 190ο0 0 2 θ 20ο8 b b 12 + 3 θ 390ο0 0 4 θ 4-90ο0 8 5 θ 5-90ο0 0 6 θ 60ο0 b 3 图1 PUMA250机器人结构图ai连杆长度(Zi-1和Zi距离) αi连杆扭角(Zi-1和Zi夹角); di连杆距离(沿着关节i轴线两公垂线距离Xi-1和Xi) θi连杆夹角(垂直关节i轴线两公垂线夹角Zi-1和Xi-1) A i=
《微波技术基础》期末试题一 选择填空题(共30分,每题3分) 1.下面哪种应用未使用微波() (a)雷达(b)调频(FM)广播 (c)GSM移动通信(d)GPS卫星定位 2.长度1m,传输900MHz信号的传输线是() (a)长线和集中参数电路(b)长线和分布参数电路 (c)短线和集中参数电路(d)短线和分布参数电路 3.下面哪种传输线不能传输TEM模() (a)同轴线(b)矩形波导(c)带状线(d)平行双线 4.当矩形波导工作在TE10模时,下面哪个缝不会影响波的传输() 5.圆波导中的TE11模横截面的场分布为() (a)(b)(c) 6.均匀无耗传输线的工作状态有三种,分别为,和。
7.耦合微带线中奇模激励的对称面是壁,偶模激励的对称面是壁。 8.表征微波网络的主要工作参量有阻抗参量、参量、参量、散射参量和参量。 9.衰减器有衰减器、衰减器和衰减器三种。 10.微波谐振器基本参量有、和三种。 二.(8分)在特性阻抗Z0=200?的传输线上,测得电压驻波比ρ=2,终端为 U0V,求终端反射系数、负载阻 =1 电压波节点,传输线上电压最大值 max 抗和负载上消耗的功率。 三.(10分)已知传输线特性阻抗Z0=75?,负载阻抗Z L=75+j100?,工作频率为900MHz,线长l=0.1m,试用Smith圆图,求距负载最近的电压波腹点的位置和传输线的输入阻抗(要求写清必要步骤)。 四.(10分)传输线的特性阻抗Z0=50Ω,负载阻抗为Z L=75Ω,若采用单支节匹配,求支节线的接入位置d和支节线的长度l(要求写清必要步骤)。五.(15分)矩形波导中的主模是什么模式;当工作波长为λ=2cm时,BJ-100型(a*b=22.86*10.16mm2)矩形波导中可传输的模式,如要保证单模传输,求工作波长的范围;当工作波长为λ=3cm时,求λp,vp及vg。 六.(15分)二端口网络如图所示,其中传输线的特性阻抗Z0=200Ω,并联阻抗分别为Z1=100Ω和Z2=j200Ω,求网络的归一化散射矩阵参量S11和S21,网络的插入衰减(dB形式)、插入相移与输入驻波比。