电力系统暂态稳定分析的主要目的是检查系统在大扰动下(如故障、切机、切负荷、重合闸操作等情况),各发电机组间能否保持同步运行,如果能保持同步运行,并具有可以接受的电压和频率水平,则称此电力系统在这一大扰动下是暂态稳定的。在电力系统规划、设计、运行等工作中都要进行大量的暂态稳定分析,因为系统一旦失去暂态稳定就可能造成大面积停电,给国民经济带来巨大损失。通过暂态稳定分析还可以研究和考察各种稳定措施的效果以及稳定控制的性能,因此有很大的意义。
当电力系统受到大扰动时,发电机的输入机械功率和输出电磁功率失去平衡,引起转子的速度及角度的变化,各机组间发生相对摇摆,其结果可能有两种不同情况。一种情况是这种摇摆最后平息下来,系统中各发电机仍能保持同步运行,过渡到新的运行状态,则认为系统在此扰动下是暂态稳定的。另一种情况是这种摇摆最终使一些发电机之间的相对角度不断增大,也就是说发电机之间失去了同步,此时系统的功率及电压发生强烈的振荡,对于这种情况,我们称系统失去了暂态稳定。这时,应将失步的发电机切除并采取其他紧急措施。除此以外,系统在大扰动下还可能出现电压急剧降低而无法恢复的情况,这是另一类失去暂态稳定的形式,也应采取紧急措施恢复电压,恢复系统正常运行。这两大类暂态稳定问题分别称为功角型和电压型暂态稳定问题,并且常互相影响,互相关联。为了防止在大扰动下系统失去暂态稳定,在电力系统中需要根据预想的典型大扰动,分析系统在这些典型扰动下的暂态稳定性,这就是电力系统暂态稳定分析的基本任务,其中最大量的分析是功角稳定问题。
现代电力系统一方面采用了先进技术和装置来改善系统的暂态稳定性,如快速高顶值倍数的励磁系统(供给同步发电机励磁电流的电源及其附属设备统称为励磁系统。它一般由励磁功率单元和励磁调节器两个主要部分组成。励磁功率单元向同步发电机转子提供励磁电流;而励磁调节器则根据输入信号和给定的调节准则控制励磁功率单元的输出)、快关汽门(实现两种减功率方式:短暂减功率和持续减功率1、短暂减功率用于系统故障初始的暂态过程,减少扰动引起的发电机转子过剩动能以防止系统暂态稳定破坏。 2、持续减功率用于防止系统静稳定破坏、消除失步状态、限制设备过负荷和限制频率升高。)、制动电阻(1、保护变频器电机在快速停止过程中,由于惯性作用,会产生大量的再生电能,如果不及时消耗掉这部分再生电能,就会直接作用于变频器专用型制动电阻,变频器的直流电路部分,轻者,变频器会报故障,重者,则会损害变频器; 2、保证电源
电网络,制动电阻将电机快速制动过程中的再生电能直接转化为热能,这样再生电能就不会反馈到电源电网络中,不会造成电网电压波动,从而起到了保证电源网络的平稳运行的作用。)、静止无功补偿装置、高压直流输电技术等等;但另一方面又出现了一些对暂态稳定不利的因素,例如:大型机组参数恶化,其相应的
暂态电抗d
X '增大和惯性时间常数J T 相对减少;超高压长距离重负荷输电线路的投入;同杆并架线路的增加等等。此外,有些措施对第一摇摆稳定有利,但对系统后续摇摆中的阻尼性能及相应的系统稳定性带来不利影响,因此要注意稳定措施的全局规划及协调。
电力系统暂态稳定分析目前主要有两种方法,即时域仿真(time simulation)法,又称逐步积分(step by step)法,以及直接法(direct method),又称暂态能量函数法(transient energy function method)。
时域仿真法将电力系统各元件模型根据元件间拓扑关系形成全系统模型,这是一组联立的微分方程组和代数方程组,然后以稳态工况或潮流解为初值,求扰动下的数值解,即逐步求得系统状态量和代数量随时间的变化曲线,并根据发电机转子摇摆曲线来判别系统在大扰动下能否保持同步运行,即暂态稳定性。
时域仿真法由于直观,可适应有几百台机、几千条线路、几千条母线的大系统,可适应各种不同的元件模型和系统故障及操作,因而得到广泛应用。
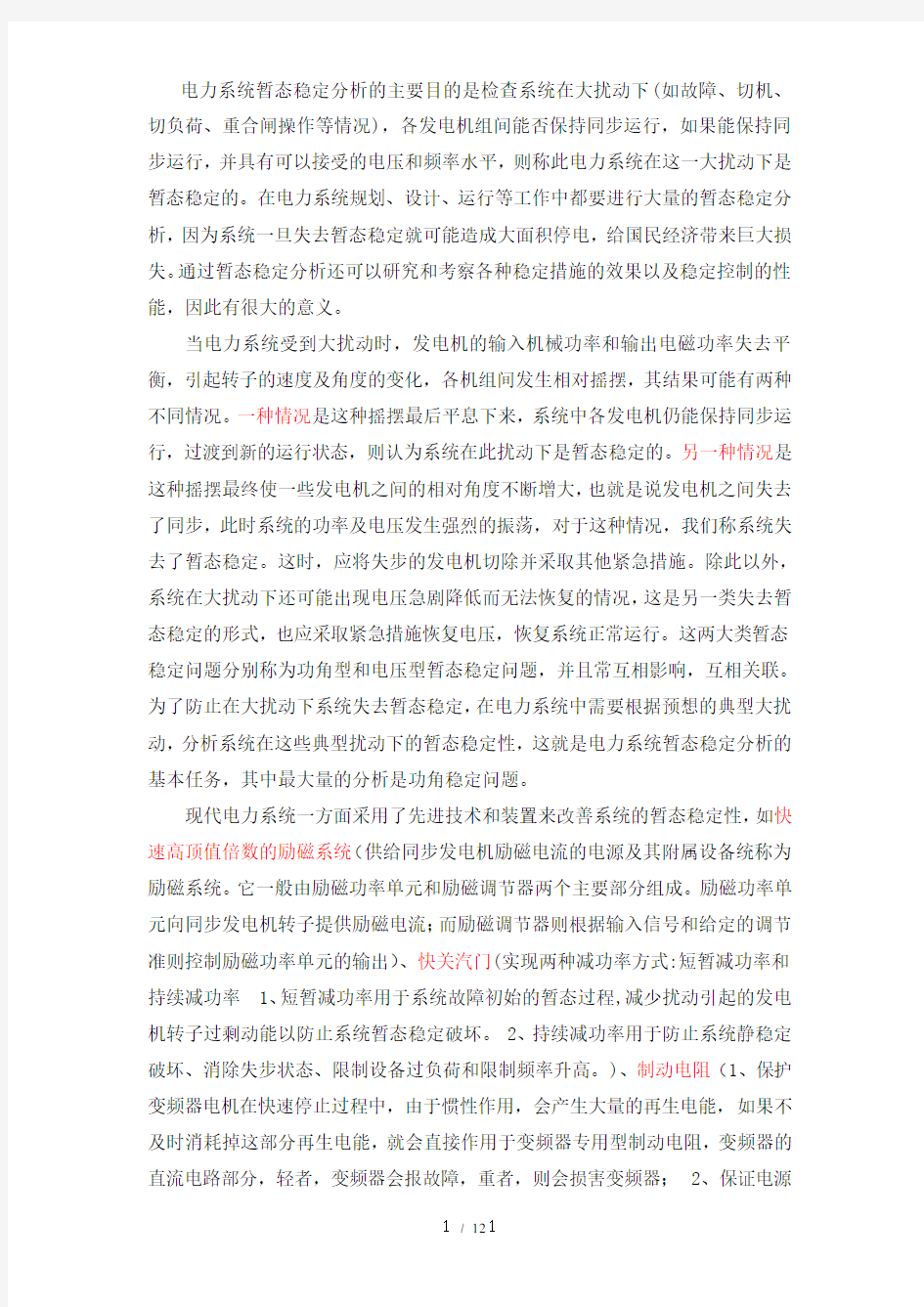
电力系统基本上是由发电机、励磁系统、原动机及调速器以及网络和负荷组成的。其相互联系示于图8-1。其中发电机分为二部分,即转子运动方程部分和电磁回路方程部分。转子运动方程反映了当发电机输入机械功率
m P 和输出电功率e P 不平衡时引起发电机转速ω和转子角δ的变化。发电机转速信号送入调速系统和参考速度比较,其偏差作为调速器的控制输入量,以控制原动机的输出机械功率m P 。发电机转子角δ则用于进行发电机dq 坐标下电量和网络xy 同步坐标下电量间的接口。发电机的电磁回路方程即发电机定子、转子绕组在dq 坐标下的电压方程,它以励磁系统输出励磁电压f E 为输入量,发电机端电压和电流
经坐标变换,可跟同步坐标下网络方程接口,并联立求解。所解得的机端电压
t U 反馈回励磁系统,励磁系统将机端电压和参考电压
ref U 比较,以控制发电机励磁
电压f E 。而发电机的输出电磁功率e P 将影响转子运动的功率平衡及转子速度和角度的变化。网络一般表示为节点导纳阵形式,网络除和发电机相连外,还和负荷相连。图8-1中只画出了实际网络和一台发电机、一个负荷之间的联系。实际的电网有许多发电机和负荷,通过网络互相联系和互相影响,造成了电力系统暂态稳定分析的复杂性。
图8-1 电力系统基本组成部分及相互联系示意图
暂态稳定分析由于主要研究发电机转子摇摆特性,主要和网络中的工频分量有关,故发电机可忽略定子暂态而采用实用模型,而网络采用准稳态模型,负荷则采用静态模型或机械暂态或机电暂态的动态模型。为了突出电力系统暂态稳定分析的基本原理和步骤,对发电机采用经典二阶模型,忽略凸极效应,并设暂态电抗d X '后的暂态电动势E 'E 幅值恒定,从而忽略励磁系统的动态,以简化分析。应当指出,E '恒定已计及了励磁系统的一定作用,即认为励磁系统足够强,从而能保证d X '后的暂态电动势E '恒定。另外,忽略调速器和原动机动态作用,即
认为机械功率m P 为定常值。
在上述模型及相应假定下,发电机忽略定子绕组内阻时的定子电压标幺值方程为
G d G I X j E U '-'= (8-1)
式中,
G U ,G I 为发电机端电压及流出的电流,均为同步坐标下的复数量;
δ∠'='E E 为暂态电动势,E '=const.。式(8-1)是同步坐标下的复数线性代数方程。
发电机的转子运动方程为(标幺值):
?????-=-= 1ωδωdt d P P dt d T e
m J (8-2)
式中
) Re(*G G
e I U P = m P =const.
当将式(8-1)、式(8-2)和网络方程联立求解时,可解出
G U ,G I ,ω,δ。 对于负荷,设采用最简单的线性负荷模型,从而对于三相对称负荷有 L L L I Z U = 或 L L L U Y I =
(8-3)
式中,L L Y Z ,分别为负荷等值阻抗和导纳;L L I U ,分别为负荷电压及其吸收的
电流。
若设网络节点导纳阵方程为
I U Y =
(8-4)
式中,I U 和分别为节点电压和各节点注入网络的电流。对于发电机节点,I
相应元为G I ;对于负荷节点,I
相应元为L I -;对于网络节点,I 相应元为零。 式(8-1)~式(8-4)构成了系统的基本方程。这是一组联立的微分方程组和代数方程组。
暂态稳定时域仿真分析的核心是当n t 时刻的变量值已知时,如何求出1+n t 时
刻的变量值,以便由0t 时的变量初值(一般是潮流计算得的稳态工况下变量值),
逐步计算出,,21t t …时刻的变量值,并在系统有操作或发生故障时作适当处理。
下面先介绍上述简化模型下,n t ~1+n t 时段的计算方法。对于式(8-1)~式(8-4)
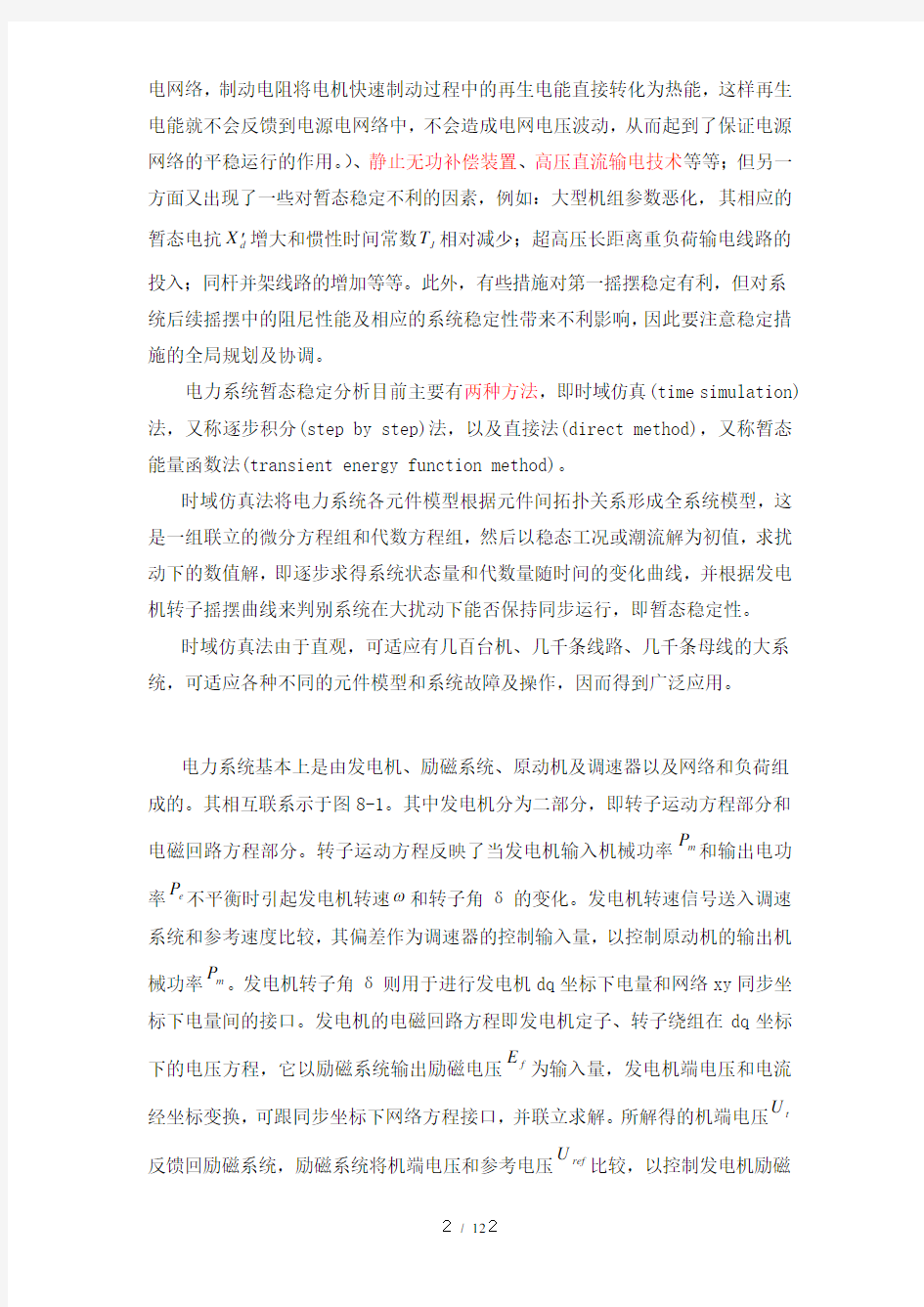
的简化模型电力系统,可将负荷阻抗并入导纳阵,这只要修正负荷接点对应的导纳阵对角元,从而负荷接点转化为网络节点,式(8-4)中相应节点的注入电流化为零。同时将各发电机方程(8-1)改写为导纳方程形式,即
G G G G G G d G d G U Y I U Y E Y X j U X j E I -'-'='-''==def (8-5)
式中,
d G X j
Y '=
1,为发电机暂态导纳,式(8-5)的等值电路如图8-2所示。显然可把G Y 并入网络导纳阵,即修正发电机节点相对应的导纳阵对角元,则联立
求解发电机和网络方程的问题就转化为在发电机节点有注入电流
E Y I G G '=' 时,网络方程(已将G Y 和L Y 并入导纳阵)的求解问题。网络方程的求解本质上是求解一组复数线性代数方程,可用高斯消去法。由于系统无操作时,导纳阵不变,故可预先对导纳阵作三角分解,存储因子表,然后每一时步根据各节点注入的电流
求解各节点电压。在计算每一时步各发电机的等值注入电流G I ' 时,由于E
' 的相角δ随时间而变,需由转子运动方程计算确定,故实用中可根据n t 时刻的
n n n e n m P P δω,,,,,,先用某种微分方程的数值求解法来估算
1+n t 时刻的1+n ω和1+n δ,如设n
n t t h -=+1,由式(8-2)取 ???????????-++≈-+=+≈+++ 12/)(11,,1h T P P h h n n n n J n e n m n n n n ωωδδωωωω (8-6)
式(8-6)又称作是微分方程(8-2)在n t ~1+n t 时段上的差分代数方程,从而可得
11++∠'='n n E E δ ,则各发电机1+n t 时刻等值电流源1
,+'n G I 可求,可进而求解网络方程得1+n U ,然后可根据式(8-5)计算发电机端电流
G I ,并计算发电机的电磁功率
) Re(G *I U P G e =。这样计算得的
1+n t 时刻的变量精度可能较差,必要时可进行校
正和迭代计算,以改善精度。
图8-2 经典模型发电机等值电路图
简化模型的电力系统暂态稳定分析的步骤和流程框图见图8-3。下面对其作简要说明。
(1) 暂态稳定分析首先输入原始数据,这包括系统元件的模型、参数、网络拓扑信息、扰动过程信息、稳定分析要求(如计算步长、仿真总时间、失稳判据等)、打印输出要求,另外还应输入暂态分析的初始稳态工况,一般为潮流计算结果。此即流程框图中框①。
(2) 然后根据潮流及原始数据计算各代数变量和状态变量的初值,及E 'E 和
m P 的稳态值,采用简化模型时E '和m P 在暂态过程中保持不变。此即流程框图中
框②。对于负荷节点,潮流中已计算得负荷有功功率
0L P 、无功功率0L Q 、及负荷母线电压0L U ,则由
2000L L L L U Y jQ P =+ (8-7)
可计算负荷等值导纳L Y 。对于发电机节点,潮流中已计算得发电机发出的有功0G P 、无功功率0G Q 及端电压0G U ,则由
0*000G G G G I U jQ P =- (8-8)
计算0G I ,再由式(8-1)计算
0000G d G I X j U E E '+=∠'='δ,得E '及0δ,电磁功率0G0*00) Re(m G e P I U P == ,E '和0m P 在暂态中保持不变。此外10
=ω(p.u),至此系统暂态分析的初值计算毕。
(3) 根据网络元件参数及网络拓扑关系形成网络稳态工况下节点导纳阵,也可直接从潮流输出中读入。将负荷等值导纳L Y 及发电机内部暂态导纳d
G X j Y '=1并入导纳阵,对导纳阵作因子表计算。此即流程框图框③。 (4) 将时钟指针n t 置零,根据扰动过程参数,判别当前有无扰动发生。若有
扰动则需要根据扰动参数修改导纳阵及微分方程,并设n t 时刻状态量不突变,据
扰动后系统代数方程计算+n t 时刻的代数量,作为1~++n n t t 时步的初值,此即流程
框图中框④和⑤;若n t 时刻无扰动则直接转入框⑥。
(5) 作1~++n n t t 时段计算,求取1+n t 时刻的状态量和代数量,前面对此已作介绍,不予重复。此即框⑥的工作。
(6) 若本时步末要求打印输出结果,则转框⑦作相应处理,否则判别是否要停机:包括由于仿真总时间到而要求停机及据失步判据已判明系统失步不必继续计算而停机。若要停机则作相应结尾处理而停机,否则表明系统还应继续仿真下去,则更新时标,转去下一步计算。此即流程框图中框⑧一⑩的工作。
下面对实际的暂态稳定分析中的主要问题作一初步讨论,以便在后续章节中加以解决。
(1) 发电机凸极效应和采用高阶模型时的问题 当计及发电机凸极效应时,q d X X '≠',因此定子电压方程不能表示为与经典模型相似的同步坐标下的复数方程(8-1),而需分别建立定子d 绕组、q 绕组的电压方程,并在联网时作特殊处理,这包括凸极效应处理和dq-xy 坐标变换。此外发电机采用三阶及三阶以上实用模型时,要计及励磁系统动态,需将发电机和励磁系统微分方程联立作数值计
算。当进一步计及原动机和调速器动态时,还要加入其相应的微分方程一起作数值计算。
(2) 负荷采用非线性静态模型或动态模型时的问题 当负荷采用非线性静态模型时,在联网计算中需要求解非线性代数方程组,从而增加了分析计算的复杂性。实用计算时,要对负荷和网络的接口作特殊处理,以便计算各时段的网络潮流。当负荷采用动态模型时,联网计算需将其微分方程差分化,化为相应计算时步的差分代数方程,再和网络方程联立求解,动态负荷和网络接口时也要作适当处理。
(3) 微分方程求数值解的数值稳定性问题 暂态稳定分析要求求解联立的
微分方程组和代数方程组,对于n t ~1+n t 时步计算通常将微分方程根据某种数值积
分准则或根据泰勒级数化为差分代数方程,从而由n t 及过去时刻的系统变量求取
1+n t 时刻的状态量和代数量。若采用不同的数值积分方法(如改进尤拉法、龙格-库塔法、隐式梯形积分法等等),则数值积分误差的传递规律,或者说数值稳定性将不同,有些方法在一定条件下会使分析结果严重畸变。此外,采用不同的数值积分方法还会影响计算的处理过程以及计算的精度和时间。
(4) 微分方程和代数方程交替求解时的“交接误差”问题 在求解系统的微分方程组和代数方程组时,有些算法对微分方程和代数方程交替求解,即对于系统方程组
?????==),( 0(z y g y z y,f dt d ) (8-9)
式中,y 为状态矢量;z 为代数矢量;f 、g 为适当维数的函数。若设n t 时刻的n
y 和n z 已解出,并据式(8-9)的第二式,用某种数值积分法估计状态量y 在
1+n t 时刻的值
)0(1+n y ,再将)0(1+n y 代入式(8-9)的第一式通过求解代数方程计算)0(1+n z ,这样求得的
)0(1+n y 和)0(1+n z 一般不能严格满足式(8-9)的第二式。为改善精度,可进一步根据n y ,n z ,)0(1+n y ,)0(1+n z 和式(8-9)第二式,作1+n y 的校正计算,得校正后的
1+n y ,然后再代入式(8-9)第一式计算与校正后的1+n y 相对应的1+n z ,如此迭代直到计算收
敛。显然这种计算方法对代数方程和微分方程交替求解,计算结果不能同时满足式(8-9)中的两组方程,从而造成所谓的“交接误差”,若多次迭代又会增加机时。为了消除“交接误差”,可把式(8-9)中的代数方程和差分化的系统微分方程联立求解,但求解过程较复杂,因为一般要求解一组非线性代数方程组。
(5) 故障及操作的处理问题 当系统发生故障或操作(切机、切负荷、切除线路等等)时,系统节点导纳阵和微分方程组要作相应的修正。由于系统状态量在过程中不发生突变,而代数量则在操作瞬间要发生突变,故还要根据操作后的系统代数方程求解突变后的代数量。还应指出,在发生不对称操作和故障时,还要根据序网理论和故障分析理论作相应处理,在复杂故障时,处理更为复杂。
8.3 发电机节点的处理和机网接口计算
发电机节点的处理和机网接口计算与发电机采用的模型有关,也和联网计算采用的方法有关。目前的发电机节点处理方法大体上可分为以下4类。
(1) 发电机采用经典模型时的处理方法。这一类处理方法已在上一节简化模型暂态稳定分析中作了介绍,即化为图8-2所示发电机等值导纳d
G X j Y '=1和发电机等值电流源E Y I G G '=' 相并联的形式。将G
Y 并入导纳阵,无操作时导纳阵不变,而每时步据发电机转子角δ更新发电机注入网络的等值电流源G
I ' ,即可求解网络方程,计算节点电压。 (2) 考虑凸极效应的直接解法。其实质是将网络复数线性代数方程实、虚部分开,增阶化为xy 同步坐标下的实数线性代数方程,并将发电机方程由dq 坐标化为xy 坐标,再和网络方程联立求解,最终是在实数域内求解线性代数方程。这种解法对负荷非线性适应能力差,且发电机方程由dq 坐标据转子角δ转化为xy 坐标,引起导纳阵中发电机节点相应的对角 (2×2)子块由于δ变化而为非定常元素,每一时步要重新计算因子表,机时多且内存要增加一倍,目前在实用的暂态稳定分析程序中已不再采用此法,但这种方法物理概念清楚,不需迭代,求解网络方程为求解实线性代数方程组,也有一定优点。后面将对之作简单介绍。
(3) 考虑凸极效应的迭代解法。该方法特点是力求在复数域中求解线性代数方程来实现网络方程求解,并要求导纳阵元素在无操作时保持定常,而不随发电机转子角δ而变化,从而克服了直接解法的缺点。但发电机的凸极效应及转子角变化对机网接口计算的影响,都要通过修正发电机注入网络的电流源来计及,而电流源计算还同1+n t 时刻的节点电压值有关。由于1+n t 时刻的节点电压正待计算,而不预知,因此1+n t 时刻相应的电流源也不能预先准确计算,故要通过迭代,逐步逼近准确值,这就是迭代解法的本质。迭代解法相对于直接解法有节省内存、因子表定常、计算速度快、便于适应非线性负荷模型等特点,但计算中每时步计算需要迭代,并有迭代误差。迭代解法在一些实用暂态稳定分析程序中仍在使用,并常和改进欧拉法求解微分方程相结合。后面将对此方法作进一步介绍。
(4) 考虑凸极效应的牛顿法。牛顿法是求解非线性代数方程组的优良方法,有良好的收敛性能,已广泛用于电力系统潮流计算。当发电机计及凸极效应,负荷计及非线性,系统中元件微分方程化为差分代数方程后,全网的代数方程联立,实质上是要求解一组非线性代数方程,故也可采用牛顿法求解。相对于直接解法和迭代解法,用牛顿法进行机网接口计算编程复杂,因为要计算雅可比矩阵元素,而雅可比矩阵元素随时间而变化,故计算机时也较多。但其最大优点是对非线性元件模型的适应性好,可将微分方程的差分代数方程和系统代数方程联立求解,无“交接误差”,故计算精度高、累计误差小,因而在暂态稳定分析中广泛应用。它常和隐式梯形积分法求解微分方程相结合,后面将对隐式梯形积分法作进一步介绍。
8.3.1考虑凸极效应的直接解法
当发电机计及暂态凸极效应,即q d
X X '≠'时,发电机定子方程就不能用式(8-1)的简单复数关系来表示,必须对d 轴、q 轴等值绕组分别列方程。当发电机采用四阶(或三阶)实用
模型时,定子电压方程为 (三阶模型时,下列方程中q d
X E '=',0为q X )
???-'-'=-'+'=q a d d q q d a q q d d I r I X E U I r I X E U (8-10)
当发电机采用五阶、六阶实用模型时,定子电压方程为
???-''-''=-''+''=q a d d q q
d a q q d d I r I X E U I r I X E U (8-11) 由于式(8-10)和式(8-11)有相同形式,故下面将以发电机三阶、四阶实用模型为例,即用式(8-10)讨论机网接口计算问题。
将式(8-10)写成导纳阵形式
??
????''??????'-'+=??????-'-'??????''-=??????-q d a d q a q d a d q d d a d q a q d E E r X X r X X r U E U E r X X r I I ''211 (8-12) 为了和网络方程接口,需将dq 坐标化为xy 同步坐标,对式(8-12)二边右乘坐标变换阵
T :??
????-=δδδδsin cos cos sin T ,则dq xy Tf f =,从而式(8-12)化为 ??????-'-'????????????-'-'??????'-'''+=??
????=-y y x x y y x x y y x x a d q a q d a y x U E U E G B B G U E U E r X X r X X r I I def 121T T (8-13) 式中
?????????????????
????'-'+'+'-''+='-'+''+=??????'-'+'+'''+='-'-''+='+'-=''+'='2/2cos )()(211 ]2/2sin )([12/2cos )()(211 ]2/2sin )([1 sin cos cos sin 2222δδδδδδδδd d q d q d a y q d a q d a y
q d q d q d a x
q d a q d a x
q d y
q d x X X X X X X r B X X r X X r G X X X X X X r B X X r X X r G E E E E E E (8-14) 显然式(8-13)中导纳阵??
????y y x x
G B B G 是转子角δ的函数,且y x y x B B G G -≠≠,,不具备??
????-G B B G 形式,无法直接将式(8-13)化为复数方程,然后与网络方程联立,在复数域中求解。
为了便于机网接口,直接解法中先把n 个节点的网络复数线性代数方程I U
Y =增阶化为2n 维的实线性代数方程。
???????????
???????????????????????????????????????????????????????????-??????-??????-??????-??????-??????-??????-??????-??????-=??????????????????????????????????????????yn xn yi xi y x nn nn nn nn ni ni ni ni n n n n in in in in ii ii ii ii i i i i n n n n i i i i yn xn yi xi y x U U U U U U G B B G G B B G G B B G G B B G G B B G G B B G G B B G G B B G G B B G I I I I I I 1111111111111111111111111111 式中,ij ij ij Y jB G =+为Y 阵中i 行j 列元素,i yi xi I jI I =+和i
yi xi U jU U =+分别为U I ,中第i 个元素。
为不失一般性,设式(8-13)所描写的发电机接于网络第i 个节点,则式(8-13)中??
????y x I I 和
??????y x U U 即为式(8-15)中??????yi xi I I 和??????yi xi U U ,将式(8-13)代入式(8-15)中第i 个节点方程,消去??????yi xi I I ,并将i 节点方程整理为
????????????+++-++????????????-=??????????????????????∑=≠=yi xi y ii y
ii x ii x ii yj xj n i j j ij ij ij ij y x y y x x yi xi U U G G B B B B G G U U G B B G E E G B B G I I 1''def ''
(8-16) 显然,当根据系统微分方程预估本计算时步末的δ,,q d
E E ''等状态量的值后,则可根据式(8-14)计算y x y x B B G G ,,,及y x E E '',;
然后根据式(8-16)可计算发电机注入网络的等值电流源??????'
'yi xi I I ;再用发电机2×2等值导纳阵????
??y y x x G B B G 根据式(8-16)修正网络导纳阵i 节点相应的2×2子块??
????-ii ii ii ii
G B B G ,并将式(8-16)代替式(8-15)中的第i 号节点方程,对各个发电机节点均作相似处理后,便可求解网络方程。
这种机网接口求解方法称为直接解法,其主要优点是物理概念清楚,不需迭代。网络方程求解为求解一组实线性代数方程。其主要问题是增阶处理使内存要增加一倍;,,x x B G y y B G ,非定常,从而网络方程系数矩阵经修正后也非定常,因此每一时步要作三角分解,计算量较大;另外,这种方法对非线性负荷适应性略差。因此,这种解法目前逐步为下面介绍的方法所取代。
8.3.2 考虑凸极效应的迭代解法
设发电机采用3~6阶实用模型,与直接解法相似以式(8-10)为基础进行讨论,将之化为式(8-13)和式(8-14)表达的导纳参数形式。观察式(8-14)可知,y y x x B G B G ,,,中的定常部分
具有??
????-G B B G 形式,其中)(2)(,22q d a q d q d a a X X r X X B X X r r G ''+'+'-=''+=。故可用复数形式G +jB 表示;而y y x x B G B G ,,,中随δ变化部分,可同电动势一起用非定常的电流源表示,从而引出相应的联网迭代解法。下面作具体推导。
将式(8-13)改写为
??????+???????????
?--????????????-'-'??????-''+'-'+??
????-'-'??????-=??????=2211def 2 2sin 2cos 2cos 2sin )(21y x y x y x y y x x q d a q d y y x x y x I I U U G B B G I I U E U E X X r X X U E U E G B B G I I δδδδ (8-17)
式中 ?????????????????????-'-'??????-''+'+'=??
??????????''??????-=??????'+'-=''+'='''+'+'-=''+=y y x x q d a q d y x y x y x q d y
q d x q d a q d q d a a U E U E X X r X X I I E E G B B G I I E E E E E E X X r X X B X X r r G δδδδδδδδ2sin 2cos 2cos 2sin )(21 sin cos cos sin )(2)(,2221122 可以用复数形式表示T y x I I ),(11及T
y x I I ),(22为(“*”表示复数取共轭) ???
????'=-'''+'-'=+=''=+=),,()()(21 2**2222111U E f e U E X X r X X j jI I I E Y jI I I j q d a q d y x G y x δδ (8-18) 式中
q d a q d a G X X r X X j r jB G Y ''+'+'-=+='22/)(
故式(8-17)可用复数表示为:
U Y I I I G '-+=21 (8-19)
式中,G
Y I I ',,21 定义见式(8-18);I 和U 为发电机端电流和端电压。相应的发电机等值电路如图8-4所示。显然,G
Y '可并入导纳阵,G Y '为定常值;1I 在据微分方程预估状态量q d
E E '',,δ的值后,亦可计算;2I 则由于是节点电压U 的函数,而U 正是网络方程要求解的,故需要进行迭代计算。设1~+n n t t 无操作,1,1,1,,+++''n q n d
n E E δ已预报,从而各时步中计
算步骤如下:
(1) 用上一时步末的发电机电压n U 作为本时步末的电压预估值)
0(1+n U (也可用更精细的预报方法); (2) 则可根据式(8-18)计算1I ,2
I 注入电流; (3) 若设G
Y '已并入网络导纳阵(通过修改相应节点导纳阵对应元素),且因子表已计算毕,则以1I +2
I 为发电机注入网络的电流,求解网络方程,可得全网络节点电压; (4) 若计算得发电机电压1
+n U 与预估值接近,则本时步计算结束,否则进行迭代,即更新电压预估值,并更新注入电流2
I ,重解网络方程,直到迭代收敛。
图8.-4 考虑凸极效应发电机等值电路
迭代解法对于发电机和负荷的非线性适应能力良好,计算速度快,无操作时,迭代计算收敛很快,该方法目前仍在实用的暂态稳定分析程序中应用。
采用牛顿法时发电机方程的处理在8.8节中介绍。
时域有限差分法(FDTD算法) 令狐文艳 时域有限差分法是1966年K.S.Yee发表在AP上的一篇论文建立起来的,后被称为Yee网格空间离散方式。这种方法通过将Maxwell旋度方程转化为有限差分式而直接在时域求解, 通过建立时间离散的递进序列, 在相互交织的网格空间中交替计算电场和磁场。 FDTD算法的基本思想是把带时间变量的Maxwell旋度方程转化为差分形式,模拟出电子脉冲和理想导体作用的时域响应。需要考虑的三点是差分格式、解的稳定性、吸收边界条件。有限差分通常采用的步骤是:采用一定的网格划分方式离散化场域;对场内的偏微分方程及各种边界条件进行差分离散化处理,建立差分格式,得到差分方程组;结合选定的代数方程组的解法,编制程序,求边值问题的数值解。 1.FDTD的基本原理 FDTD方法由Maxwell旋度方程的微分形式出发,利用二阶精度的中心差分近似,直接将微分运算转换为差分运算,这样达到了在一定体积内和一段时间上对连续电磁场数据的抽样压缩。 Maxwell方程的旋度方程组为:
E E H σε+??=??t H H E m t σμ-??-=??(1) 在直角坐标系中,(1)式可化为如下六个标量方程: ???????????+??=??-??+??=??-??+??=??-??z z x y y y z x x x y z E t E y H x H E t E x H z H E t E z H y H σεσεσε, ???????????-??-=??-??-??-=??-??-??-=??-??z m z x y y m y z x x m x y z H t H y E x E H t H x E z E H t H z E y E σμσμσμ (2) 上面的六个偏微分方程是FDTD 算法的基础。 Yee 首先在空间上建立矩形差分网格,在时刻t n ?时刻, F(x,y,z)可以写成 ),,(),,,(),,,(k j i F t n z k y j x i F t z y x F n =????=(3) 用中心差分取二阶精度: 对空间离散: 对时间离散: ()[] 2211),,(),,() ,,,(t O t k j i F k j i F t t z y x F n n t n t ?+?-≈??-+?=(4) Yee 把空间任一网格上的E 和H 的六个分量,如下图放置: 图1 Yee 氏网格及其电磁场分量分布 在FDTD 中,空间上连续分布的电磁场物理量离散的空 间排布如图所示。由图可见,电场和磁场分量在空间交叉 放置,各分量的空间相对位置也适合于Maxwell 方程的差 分计算,能够恰当地描述电磁场的传播特性。同时,电场 和磁场在时间上交替抽样,抽样时间间隔相差半个时间
各大仿真软件介绍(包括算法,原理) 随着无线和有线设计向更高频率的发展和电路复杂性的增加,对于高频电磁场的仿真,由于忽略了高阶传播模式而引起仿真的误差。另外,传统模式等效电路分析方法的限制,与频率相关电容、电感元件等效模型而引起的误差。例如,在分析微带线时,许多易于出错的无源模式是由于微带线或带状线的交叉、阶梯、弯曲、开路、缝隙等等,在这种情况下是多模传输。为此,通常采用全波电磁仿真技术去分析电路结构,通过电路仿真得到准确的非连续模式S参数。这些EDA仿真软件与电磁场的数值解法密切相关的,不同的仿真软件是根据不同的数值分析方法来进行仿真的。通常,数值解法分为显示和隐示算法,隐示算法(包括所有的频域方法)随着问题的增加,表现出强烈的非线性。显示算法(例如FDTD、FIT方法在处理问题时表现出合理的存储容量和时间。本文根据电磁仿真工具所采用的数值解法进行分类,对常用的微波EDA仿真软件进行论述。2.基于矩量法仿真的微波EDA仿真软件基于矩量法仿真的EDA 软件主要包括A D S(Advanced Design System)、Sonnet电磁仿真软件、IE3D和Microwave office。 2.1ADS仿真软件Agilent ADS(Advanced Design System)软件是在HP EESOF系列EDA软件基础上发展完善起来的大型综合设计软件,是美国安捷伦公司开发的大型综合设计软件,是为系统和电路工程师提供的可开发各种形式的射频设计,对于通信和航天/防御的应用,从最简单到最复杂,从离散射频/微波模块到集成MMIC。从电路元件的仿真,模式识别的提取,新的仿真技术提供了高性能的仿真特性。该软件可以在微机上运行,其前身是工作站运行的版本MDS(Microwave Design System)。该软件还提供了一种新的滤波器的设计引导,可以使用智能化的设计规范的用户界面来分析和综合射频/微波回路集总元滤波器,并可提供对平面电路进行场分析和优化功能。它允许工程师定义频率范围,材料特性,参数的数量和根据用户的需要自动产生关键的无源器件模式。该软件范围涵盖了小至元器件,大到系统级的设计和分析。尤其是其强大的仿真设计手段可在时域或频域内实现对数字或模拟、线性或非线性电路的综合仿真分析与优化,并可对设计结果进行成品率分析与优化,从而大大提高了复杂电路的设计效率,使之成为设计人员的有效工具[6-7]。2.2Sonnet仿真软件Sonnet是一种基于矩量法的电磁仿真软件,提供面
时域有限差分法的Matlab仿真 关键词: Matlab 矩形波导时域有限差分法 摘要:介绍了时域有限差分法的基本原理,并利用Matlab仿真,对矩形波导谐振腔中的电磁场作了模拟和分析。 关键词:时域有限差分法;Matlab;矩形波导;谐振腔 目前,电磁场的时域计算方法越来越引人注目。时域有限差分(Finite Difference Time Domain,FDTD)法[1]作为一种主要的电磁场时域计算方法,最早是在1966年由K. S. Yee提出的。这种方法通过将Maxwell旋度方程转化为有限差分式而直接在时域求解,通过建立时间离散的递进序列,在相互交织的网格空间中交替计算电场和磁场。经过三十多年的发展,这种方法已经广泛应用到各种电磁问题的分析之中。 Matlab作为一种工程仿真工具得到了广泛应用[2]。用于时域有限差分法,可以简化编程,使研究者的研究重心放在FDTD法本身上,而不必在编程上花费过多的时间。 下面将采用FDTD法,利用Matlab仿真来分析矩形波导谐振腔的电磁场,说明了将二者结合起来的优越性。 1FDTD法基本原理 时域有限差分法的主要思想是把Maxwell方程在空间、时间上离散化,用差分方程代替一阶偏微分方程,求解差分方程组,从而得出各网格单元的场值。FDTD 空间网格单元上电场和磁场各分量的分布如图1所示。 电场和磁场被交叉放置,电场分量位于网格单元每条棱的中心,磁场分量位于网格单元每个面的中心,每个磁场(电场)分量都有4个电场(磁场)分量环绕。这样不仅保证了介质分界面上切向场分量的连续性条件得到自然满足,而且
还允许旋度方程在空间上进行中心差分运算,同时也满足了法拉第电磁感应定律和安培环路积分定律,也可以很恰当地模拟电磁波的实际传播过程。 1.1Maxwell方程的差分形式 旋度方程为: 将其标量化,并将问题空间沿3个轴向分成若干网格单元,用Δx,Δy和Δz 分别表示每个网格单元沿3个轴向的长度,用Δt表示时间步长。网格单元顶点的坐标(x,y,z)可记为: 其中:i,j,k和n为整数。 同时利用二阶精度的中心有限差分式来表示函数对空间和时间的偏导数,即可得到如下FDTD基本差分式: 由于方程式里出现了半个网格和半个时间步,为了便于编程,将上面的差分式改写成如下形式:
第三章 控制系统的时域分析法 一、知识点总结 1.掌握典型输入信号(单位脉冲、单位阶跃、单位速度、单位加速度、正弦信号)的拉氏变换表达式。 2.掌握系统动态响应的概念,能够从系统的响应中分离出稳态响应分量和瞬态响应分量;掌握系统动态响应的性能评价指标的概念及计算方法(对于典型二阶系统可以直接应用公式求解,非典型二阶系统则应按定义求解)。 解释:若将系统的响应表达成拉普拉氏变换结果(即S 域表达式),将响应表达式进行部分分式展开,与系统输入信号极点相同的分式对应稳态响应;与传递函数极点相同的分式对应系统的瞬态响应。将稳态响应和瞬态响应分式分别进行拉氏逆变换即获得各自的时域表达式。 性能指标:延迟时间、上升时间、峰值时间、调节时间、超调量 3.掌握一阶系统的传递函数形式,在典型输入信号下的时域响应及其响应特征;掌握典型二阶系统的传递函数形式,掌握欠阻尼系统的阶跃响应时域表达及其性能指标的计算公式和计算方法;了解高阶系统的性能分析方法,熟悉主导极点的概念,定性了解高阶系统非主导极点和零点对系统性能的影响。 tr tp ts td
4.熟悉两种改善二阶系统性能的方法和结构形式(比例微分和测速反馈),了解两种方法改善系统性能的特点。 5.掌握系统稳定性分析方法:劳斯判据的判断系统稳定性的判据及劳斯判据表特殊情况的构建方法(首列元素出现0,首列出现无穷大,某一行全为0);掌握应用劳斯判据解决系统稳定裕度问题的方法。了解赫尔维茨稳定性判据。 6.掌握稳态误差的概念和计算方法;掌握根据系统型别和静态误差系数计算典型输入下的稳态误差的方法(可直接应用公式);了解消除稳态误差和干扰误差的方法;了解动态误差系数法。 二、相关知识点例题 例1. 已知某系统的方块图如下图1所示,若要求系统的性能指标为: δδ%=2222%,tt pp=1111,试确定K和τ的值,并计算系统单位阶跃输入下的特征响应量:tt,tt。 图1 解:系统闭环传递函数为:Φ(s)=CC(ss)RR(ss)=KK ss2+(1+KKKK)ss+KK 因此,ωnn=√KK,ζζ=1+KKKK2√KK, δ%=e?ππππ?1?ππ2?ζζ=0.46, t pp=ππωωdd=1ss?ωdd=ωnn?1?ζζ2=3.14 ?ωnn=3.54 K=ωnn2=12.53,τ=2ζζωnn?1KK=0.18 t ss=3ζζωωnn=1.84ss
开题报告 论文题目:基于matlab的时域有限差分法的电磁仿真研究(10分) 学院:电气工程及其自动化学院学号:1103000105姓名:__杨志刚___ 一、论文选题的目的和意义(300字以内;15分) 时域有限差分法,因具有多种优点被运用到电磁场理论研究的各个方面,而且其使用成效和应用领域还在迅速扩大和提高,在现代电磁场理论研究中具有很大的重要性和很强的可操作性。但是同时这种方法也存在一定的缺陷,主要表现在对无边界问题需要吸收边界条件处理,有色散误差,消耗内存大等方面。本课题在利用时域有限差分法对一些实际的算例进行实验仿真和验证,同时对这种方法在解决实际问题的缺陷进行一定程度的研究和分析。 Matlab作为一种工程仿真工具得到了广泛应用。用于时域有限差分法,可以简化编程,使研究者的研究重心放在FDTD法本身上,而不必在编程上花费过多的时间。 二、国内外关于该论题的研究现状和发展趋势(500字以内;15分) 时域有限差分方法作为一种典型的全波时域分析方法,因其原理直观、编程简便、实用性强在目前的计算电磁学领域内被人们广泛深入地研究,并取得巨大应用成功的方法。时域数值技术的一个突出优点是可以给出关于问题空间的丰富的时域信息,而且经过简单的时频变换,即可得到宽带范围的频域信息,相对频域方法显著地节约了计算量。最近几十年,是电磁场数值计算时域技术蓬勃发展的时期,各具优势和特色的新颖时域算法层出不穷。 但是到目前为止国内关于时域有限差分法中的PML 算法文献较少,其中绝大多数文献集中在综述和应用方面。而在国际的学报和杂志上对于这方面的文献非常多。时域有限差分法经过了三十年多年的高速发展之后,仍然还是计算电磁学制高点的研究热潮,而且其应用的范围和成效还在迅速的扩大和提高。本课题正是利用时域有限差分法的基础理论,利用matlab对一些实际的电磁场问题进行仿真研究。 三、论文的主攻方向、主要内容、研究方法及技术路线(1000字左右;40分) 通过对时域有限差分法理解基础之上,利用matlab仿真软件按照这种方法编程,实现对三种情况下的电磁场情况的仿真研究。
第3章 时域分析法 1.选择题 (1)一阶系统传递函数为 4 24 2++s s ,则其ξ,ωn 依次为( B ) A .2,1/2 B .1/2,2 C .2,2 D .1/2,1 (2)两个二阶系统的最大超调量δ相等,则此二系统具有相同的( B ) A .ωn B .ξ C .k D .ωd (3)一个单位反馈系统为I 型系统,开环增益为k ,则在r(t)=t 输入下系统的稳态误差为( A ) A . k 1 B .0 C .k +11 D .∞ (4)某系统的传递函数为) 16)(13(18 )(++= s s s G ,其极点是 ( D ) A .6,3-=-=s s B .6,3==s s C .61,31- =-=s s D .6 1,31==s s (5)二阶最佳系统的阻尼比ζ为( D ) A. 1 B. 2 C. 0.1 D. 0.707 (6)对于欠阻尼系统,为提高系统的相对稳定性,可以( C ) A .增大系统的固有频率; B. 减小系统固有频率 C. 增加阻尼 D. 减小阻尼 (7)在ζ不变的情况下,增加二阶系统的无阻尼固有频率,系统的快速性将( A ) A. 提高 B. 降低 C. 基本不变 D. 无法得知 (8)一系统对斜坡输入的稳态误差为零,则该系统是( C ) A.0型系统 B. I 型系统 C. II 型系统 D. 无法确定 (9)系统 ) )((b s a s s c s +++的稳态误差为0,它的输入可能是( A )
A.单位阶跃 B.2t C.2 t D. 正弦信号 (10)系统开环传函为 ) 1)(1(1 32 +++s s s s ,则该系统为( B )系统 A.0型 B.I 型 C. II 型 D.III 型 2.为什么自动控制系统会产生不稳定现象?开环系统是不是总是稳定的? 答:在自动控制系统中,造成系统不稳定的物理原因主要是:系统中存在惯性或延迟环节,它们使系统中的信号产生时间上的滞后,使输出信号在时间上较输入信号滞后了r时间。当系统设有反馈环节时,又将这种在时间上滞后的信号反馈到输入端。 3.系统的稳定性与系统特征方程的根有怎样的关系?为什么? 答:如果特征方程有一个实根s=a ,则齐次微分方程相应的解为c(t)=Ce at 。它表示系统在扰动消失以后的运动过程中是指数曲线形式的非周期性变化过程。 若a 为负数,则当t →∞时,c(t)→0,则说明系统的运动是衰减的,并最终返回原平衡状态,即系统是稳定的。 则当t →∞时,c(t)→∞,则说明系统的运动是发散的,不能返回原平衡状态,即系统是不稳定的。 若a=0,c(t)→常数,说明系统处于稳定边界(并不返回原平衡状态,不属于稳定状态) 4.什么是系统的稳定误差? 答:自动控制系统的输出量一般都包含着两个分量,一个是稳态分量,另一个是暂态分量。暂态分量反映了控制系统的动态性能。对于稳定的系统,暂态分量随着时间的推移。将逐渐减小并最终趋向于零。稳态分量反映系统的稳态性能,即反映控制系统跟随给定量和抑制扰动量的能力和准确度。稳态性能的优劣,一般以稳态误差的大小来衡量。 5.已知传递函数 )12.0/(10)(+=s s G 。 今欲采用加负反馈的办法,将过渡过程时间ts 减小为原来的0.1倍,并保证总放大系数不变。试确定参数Kh 和K0的数值。 解:首先求出系统传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。 一阶系统的过渡过程时间ts 与其时间常数成正比。根据要求,总传递函数应为 ) 110/2.0(10 )(+= s s φ 即 H H K s K s G K s G K s R s C 1012.010)(1)()() (00++= +=
自动控制原理经典考试题目整理 第三章-第四章 第三章时域分析法 一、自测题 1.线性定常系统的响应曲线仅取决于输入信号的______________和系统的特性,与输入信号施加的时间无关。 2.一阶系统1/(TS+1)的单位阶跃响应为。 3.二阶系统两个重要参数是,系统的输出响应特性完全由这两个参数来描述。4.二阶系统的主要指标有超调量MP%、调节时间ts和稳态输出C(∞),其中MP%和ts是系统的指标,C(∞)是系统的指标。 5.在单位斜坡输入信号的作用下,0型系统的稳态误差ess=__________。 6.时域动态指标主要有上升时间、峰值时间、最大超调量和__________。 7.线性系统稳定性是系统__________特性,与系统的__________无关。 8.时域性能指标中所定义的最大超调量Mp的数学表达式是__________。 9.系统输出响应的稳态值与___________之间的偏差称为稳态误差ess。 10.二阶系统的阻尼比ξ在______范围时,响应曲线为非周期过程。 11.在单位斜坡输入信号作用下,Ⅱ型系统的稳态误差ess=______。 12.响应曲线达到超调量的________所需的时间,称为峰值时间tp。 13.在单位斜坡输入信号作用下,I型系统的稳态误差ess=__________。 14.二阶闭环控制系统稳定的充分必要条件是该系统的特征多项式的系数_____________。15.引入附加零点,可以改善系统的_____________性能。 16.如果增加系统开环传递函数中积分环节的个数,则闭环系统的稳态精度将提高,相对稳定性将________________。 17.为了便于求解和研究控制系统的输出响应,输入信号一般采用__________输入信号。
时域有限差分法对平面TE波的 MATLAB仿真 摘要 时域有限差分法是由有限差分法发展出来的数值计算方法。自1966年Yee 在其论文中首次提出时域有限差分以来,时域有限差分法在电磁研究领域得到了广泛的应用。主要有分析辐射条线、微波器件和导行波结构的研究、散射和雷达截面计算、分析周期结构、电子封装和电磁兼容的分析、核电磁脉冲的传播和散射以及在地面的反射及对电缆传输线的干扰、微光学元器件中光的传播和衍射特性等等。 由于电磁场是以场的形态存在的物质,具有独特的研究方法,采取重叠的研究方法是其重要的特点,即只有理论分析、测量、计算机模拟的结果相互佐证,才可以认为是获得了正确可信的结论。时域有限差分法就是实现直接对电磁工程问题进行计算机模拟的基本方法。在近年的研究电磁问题中,许多学者对时域脉冲源的传播和响应进行了大量的研究,主要是描述物体在瞬态电磁源作用下的理论。另外,对于物体的电特性,理论上具有几乎所有的频率成分,但实际上,只有有限的频带内的频率成分在区主要作用。 文中主要谈到了关于高斯制下完全匹配层的差分公式的问题,通过MATLAB 程序对TE波进行了仿真,模拟了高斯制下完全匹配层中磁场分量瞬态分布。得到了相应的磁场幅值效果图。 关键词:时域有限差分完全匹配层MATLAB 磁场幅值效果图
目录 摘要 (1) 目录 (3) 第一章绪论 (4) 1.1 课题背景与意义 (4) 1.2 时域有限差分法的发展与应用 (4) 2.1 Maxwell方程和Yee氏算法 (7) 2.2 FDTD的基本差分方程 (9) 2.3 时域有限差分法相关技术 (11) 2.3.1 数值稳定性问题 (11) 2.3.2 数值色散 (12) 2.3.3 离散网格的确定 (13) 2.4 吸收边界条件 (13) 2.4.1 一阶和二阶近似吸收边界条件 (14) 2.4.2 二维棱边及角顶点的处理 (17) 2.4.3 完全匹配层 (19) 2.5 FDTD计算所需时间步的估计 (23) 第三章MATLAB的仿真的程序及模拟 (25) 3.1 MATLAB程序及相应说明 (25) 3.2 出图及结果 (28) 3.2.1程序部分 (28) 3.2.2 所出的效果图 (29) 第四章结论 (31) 参考文献 (32)
时域有限差分法仿真一维TE 波在分裂场完全匹配层 吸收边界条件下的传输 一、时域有限差分法 (FDTD, Finite-Difference Time-Domain) FDTD 是1966年K.S.Yee 发表在AP 上的一篇论文建立起来的,后被称为Yee 网格空间离散方式核心思想是把带时间变量的Maxwell 旋度方程转化为差分形式,模拟出电子脉冲和理想导体作用的时域响应号称目前计算电磁学界最受关注,最时髦的算法,但还在发展完善之中国外已有多种基于FDTD 算法的电磁场计算的软件:XFDTD 等。 二、差分算法 x h ?= ()()f f x h f x ?=+- 0()()()() lim ()() ()() = 2x df f x f x f x h f x dx x x h f x f x h h f x h f x h h ?→??+-=≈=??--=+--前向差分 后向差分 中心差分 222()1() ()()2!df x d f x f x h f x h h dx dx +=++ + 222 ()1() ()()2!df x d f x f x h f x h h dx dx -=-+ + 333 ()2() ()()23!df x d f x f x h f x h h h dx dx +--=+ + 三、时域有限差分算法步骤 (1)采用一定的网格划分方式离散化场域; (2)对场内的偏微分方程及各种边界条件进行差分离散化处理,建立差分格式,得到差分方程组; (3)结合选定的代数方程组的解法,编制程序,求边值问题的数值解。 四、吸收边界条件 1、问题的提出 在电磁场的辐射和散射问题中,边界总是开放的,电磁场占据无限大空间,而计算机内存是有限的,所以只能模拟有限空间。即:时域有限差分网格将在某处被截断。这
电磁场仿真软件简介 随着电磁场和微波电路领域数值计算方法的发展,在最近几年出现了大量的电磁场和微波电路仿真软件。在这些软件中,多数软件都属于准3维或称为2.5维电磁仿真软件。例如,Agilent公司的ADS(Advanced Design System)、AWR公司的Microwave Office、Ansoft公司的Esemble、Serenade和CST公司的CST Design Studio等。目前,真正意义上的三维电磁场仿真软件只有Ansoft公司的HFSS、CST公司的Mafia、CST Microwave Studio、Zeland公司的Fidelity和IMST GmbH公司的EMPIRE。从理论上讲,这些软件都能仿真任意三维结构的电磁性能。其中,HFSS(HFSS是英文高频结构仿真器(High Frequency Structure Simulator)的缩写)是一种最早出现在商业市场的电磁场三维仿真软件。因此,这一软件在全世界有比较大的用户群体。由于HFSS进入中国市场较早,所以目前国内的电磁场仿真方面HFSS的使用者众多,特别是在各大通信技术研究单位、公司、高校非常普及。 德国CST公司的MicroWave Studio(微波工作室)是最近几年该公司在Mafia软件基础上推出的三维高频电磁场仿真软件。它吸收了Mafia软件计算速度快的优点,同时又对软件的人机界面和前、后处理做了根本性的改变。就目前发行的版本而言,CST 的MWS的前后处理界面及操作界面比HFSS好。Ansoft也意识到了自己的缺点,在刚刚推出的新版本HFSS(定名为Ansoft HFSS V9.0)中,人机界面及操作都得到了极大的改善。在这方面完全可以和CST媲美。在性能方面,两个软件各有所长。在速度和计算的精度方面CST和ANSOFT成绩相差不多。值得注意的是,MWS采用的理论基础是FIT(有限积分技术)。与FDTD(时域有限差分法)类似,它是直接从Maxwell 方程导出解。因此,MWS可以计算时域解。对于诸如滤波器,耦合器等主要关心带内参数的问题设计就非常适合;而HFSS采用的理论基础是有限元方法(FEM),这是一种微分方程法,其解是频域的。所以,HFSS如果想获得频域的解,它必须通过频域转换到时域。由于,HFSS是用的是微分方法,所以它对复杂结构的计算具有一定的优势。 另外,在高频微波波段的电磁场仿真方面也应当提及另一个软件:ANSYS 。ANSYS是一个基于有限元法(FEM)的多功能软件。该软件可以计算工程力学、材料力学、热力学和电磁场等方面的问题。它也可以用于高频电磁场分析(应用例如:微波辐射和散射分析、电磁兼容、电磁场干扰仿真等)。其功能与HFSS和CST MWS类似。但由于该软件在建模和网格划分过程中需要对该软件的使用规则有详细的了解,因此,对一般的工程技术人员来讲使用该软件有一定困难。对于高频微波波段通信、天线、器件封装、电磁干扰及光电子设计中涉及的任意形状三维电磁场仿真方面不如HFSS更专业、更理想。实际上,ANSYS软件的优势并不在电磁场仿真方面,而是结构静力/动力分析、热分析以及流体动力学等。但是,就其电磁场部分而言,它也能对任意三维结构的电磁特性进行仿真。 虽然,Zeland公司的Fidelity和IMST GmbH公司的EMPIRE也可以仿真三维结构。
第四章时域分析 完称设计后,可以验证设计在时域内的响应。Saber用瞬态分析来验证设计在时域内的响应,过程如下: 1、指定首个瞬态数据点 2、如果驱动源(Driving Source)是振荡器,要使用初始点文件(Initial Point File) 3、执行瞬态分析 4、查看瞬态分析结果 5、测量分析结果 6、制定下一步 ? 指定首个瞬态数据点 由于瞬态分析在分析运行时,使用初始点作为首个数据点,所以在瞬态分析之前,必须找到系统的工作点,可以用下列方法: ● 在瞬态分析面板内,指定Run DC Analysis First处为yes,该选择让Saber执行DC分 析来找到工作点,然后用计算的工作点作为首个数据点来进行瞬态分析。 ● 选择Analysis>Operating Point>Operating Point下拉菜单项,单独运行DC分析。大多 数情况下,Saber用DC Operating Point框中默认值就能找到合适的工作点。 ? 如果驱动源是振荡器 由于振荡器依赖噪声放大来启动的,而噪声又不是模拟器内在的,所以在瞬态分析运行开始时,必须改变初始点文件中的一些节点值以启动振荡器,详细情况看本章后边叙述。? 执行瞬态分析 1、显示瞬态分析对话框(Analysis>Time-domain>Transient)。 2、指定瞬态分析所要求的信息 瞬态分析设置面板如图4-1所示,要执行瞬态分析,必须指定下列信息: ● End Time(Basic标签):定义瞬态分析结束点。例如:如果驱动源是周期为10μS的 正弦函数,要查看前五个周期的瞬态响应,可以在该处键入50μ。 ● Start Time(Basic标签):定义瞬态分析开始点。默认情况下,该时间取决于初始点, 如果初始点被DC分析创建,该时间为0。 ● Time Step(Basic标签):作为瞬态分析中相邻计算点间重复的标尺,可以按下面的情 况设置其数值: ▲ 设计中有关时间常数的1/10 ▲ 驱动源方波最小的上升沿或下降沿 ▲ 正弦驱动源输入周期的1/100 3、指定要分析其波形的信号 Time-domain Transient Analyses面板提供下列两处来指定波形数据怎样被保存,用来画图和分析: ● Plot File(Input/Output标签):指定画图文件的名称,该文件包含了Signal List处定义 的信号的模拟结果。默认情况下,Saber为每个瞬态分析创建名为tr的画图文件,如果不想让Saber创建画图文件,在该处填入“_” ● Signal List(Input/Output标签):指定要保存模拟结果的信号,用于Saber画图。默认 情况下,信号列表只包含层次中顶级电路中的信号,如果要查看内层电路信号,必须将信号名称加入Signal List处。下列表格列出Signal List处语法的例子,在同一个Signal List处填加多个信号,用空格隔开。
时域有限差分法(FDTD 算法) 时域有限差分法是1966年K.S.Yee 发表在AP 上的一篇论文建立起来的,后被称为Yee 网格空间离散方式。这种方法通过将Maxwell 旋度方程转化为有限差分式而直接在时域求解, 通过建立时间离散的递进序列, 在相互交织的网格空间中交替计算电场和磁场。 FDTD 算法的基本思想是把带时间变量的Maxwell 旋度方程转化为差分形式,模拟出电子脉冲和理想导体作用的时域响应。需要考虑的三点是差分格式、解的稳定性、吸收边界条件。有限差分通常采用的步骤是:采用一定的网格划分方式离散化场域;对场内的偏微分方程及各种边界条件进行差分离散化处理,建立差分格式,得到差分方程组;结合选定的代数方程组的解法,编制程序,求边值问题的数值解。 1.FDTD 的基本原理 FDTD 方法由Maxwell 旋度方程的微分形式出发,利用二阶精度的中心差分近似,直接将微分运算转换为差分运算,这样达到了在一定体积内和一段时间上对连续电磁场数据的抽样压缩。 Maxwell 方程的旋度方程组为: E E H σε +??=??t H H E m t σμ-??-=?? (1) 在直角坐标系中,(1)式可化为如下六个标量方程: ???????????+??=??-??+??=??-??+??=??-??z z x y y y z x x x y z E t E y H x H E t E x H z H E t E z H y H σεσεσε,????? ??? ??? -??-=??-??-??-=??-??-??-=??-??z m z x y y m y z x x m x y z H t H y E x E H t H x E z E H t H z E y E σμσμσμ (2) 上面的六个偏微分方程是FDTD 算法的基础。 Yee 首先在空间上建立矩形差分网格,在时刻t n ?时刻,F(x,y,z)可以写成 ),,(),,,(),,,(k j i F t n z k y j x i F t z y x F n =????= (3) 用中心差分取二阶精度: 对空间离散: ()[] 2 ),,21(),,21() ,,,(x O x k j i F k j i F x t z y x F n n x i x ?+?--+≈???= ()[] 2 ),21,(),21,() ,,,(y O y k j i F k j i F y t z y x F n n y j y ?+?--+≈???= ()[] 2 )21,,()21,,() ,,,(z O z k j i F k j i F z t z y x F n n z k z ?+?--+≈???=
时域有限差分法(FDTD算法)的基本原理及仿真
时域有限差分法(FDTD 算法) 时域有限差分法是1966年K.S.Yee 发表在AP 上的一篇论文建立起来的,后被称为Yee 网格空间离散方式。这种方法通过将Maxwell 旋度方程转化为有限差分式而直接在时域求解, 通过建立时间离散的递进序列, 在相互交织的网格空间中交替计算电场和磁场。 FDTD 算法的基本思想是把带时间变量的Maxwell 旋度方程转化为差分形式,模拟出电子脉冲和理想导体作用的时域响应。需要考虑的三点是差分格式、解的稳定性、吸收边界条件。有限差分通常采用的步骤是:采用一定的网格划分方式离散化场域;对场内的偏微分方程及各种边界条件进行差分离散化处理,建立差分格式,得到差分方程组;结合选定的代数方程组的解法,编制程序,求边值问题的数值解。 1.FDTD 的基本原理 FDTD 方法由Maxwell 旋度方程的微分形式出发,利用二阶精度的中心差分近似,直接将微分运算转换为差分运算,这样达到了在一定体积内和一段时间上对连续电磁场数据的抽样压缩。 Maxwell 方程的旋度方程组为: E E H σε +??=??t H H E m t σμ-??-=?? (1) 在直角坐标系中,(1)式可化为如下六个标量方程: ???????????+??=??-??+??=??-??+??=??-??z z x y y y z x x x y z E t E y H x H E t E x H z H E t E z H y H σεσεσε,????? ??? ??? -??-=??-??-??-=??-??-??-=??-??z m z x y y m y z x x m x y z H t H y E x E H t H x E z E H t H z E y E σμσμσμ (2) 上面的六个偏微分方程是FDTD 算法的基础。 Yee 首先在空间上建立矩形差分网格,在时刻t n ?时刻,F(x,y,z)可以写成 ),,(),,,(),,,(k j i F t n z k y j x i F t z y x F n =????= (3) 用中心差分取二阶精度: 对空间离散: ()[] 2 ),,21(),,21() ,,,(x O x k j i F k j i F x t z y x F n n x i x ?+?--+≈???= ()[] 2 ),21,(),21,() ,,,(y O y k j i F k j i F y t z y x F n n y j y ?+?--+≈???= ()[] 2 )21,,()21,,() ,,,(z O z k j i F k j i F z t z y x F n n z k z ?+?--+≈???=
第四章测试系统特性 4.1 测试系统概述 测试系统是执行任务的传感器、仪器和设备的总称。现在习惯把具有自动化、智能化、可编程化等功能的测试系统称为现代测试系统。 这些装置和仪器对被测物理量进行传感、转换与处理、传送、显示、记录以及存储。测试系统的复杂程度取决于被测信息的难以程度以及所采用的试验方法。 典型测试系统的组成 研究测试系统的特性,就是研究系统的输入量x(t)、输出量y(t)和系统的传输特性h(t)三者之间的关系 系统分析中的三类问题: 1)当输入、输出是可测量的(已知),可以通 过它们推断系统的传递特性(系统辨识) 2)当系统的传递特性已知、输出可测量,可以通过它们推断导致该输出的输入量(反求) 3)如果输入和系统特性已知,则可以推断和估计系统的输出量(预测) 理想的测试系统应该具有单值的、确定的输入—输出关系。对于每一输入量都应该只有单一的输出量与之对应。知道其中一个量就可以确定另一个量。其中输入和输出成线性关系最佳。 测试装置能否实现准确测量,取决于其特性:
注:测试系统各特性是统一的,相互关联的。如动态特性方程一般可视为线性方程,但考虑静态特性的非线性、迟滞等因素,就成为了非线性方程。 1、静态特性:测量时,测试系统的输入和输出信号不随时间变化(或变化缓慢)。如温度测量、体重测量。静态测量时,测试系统表现出的响应特性称为静态响应特性。静态标准是一个试验过程,这一过程是在只改变测量系统的一个输入量,测量对应的输出量,由此得到输入与输出间的关系,作为静态特性。 静态特性包括线性度、灵敏度(Δy/Δx )、分辨力(能够测量的最小变化量)、回程误差(也称为迟滞)、零点漂移和灵敏度漂移等 2、动态特性:当被测量(输入)随时间快速变化时,测量输入与相应输出之间动态关系的数学描述。如心电图测量测量,热处理过程的温度测量、铸造过程的流量测量。动态测量:输入随时间变化,输出也随输入而变化。对迅速变化的物理量进行测定,要求动态测试仪器具有较高的动态响应特性 测试系统的(动态)数学模型主要有三种形式:①时域分析用的微分方程;②频域方程用的频率特性;③复频域用的传递函数 测量系统的微分方程(常系数微分方程、线性时不变系统) 传递函数 0 1110111)()()(a s a s a s a b s b s b s b s X s Y s H n n n n m m m m ++++++==---- 频响函数 ) ()()(ωωωj X j Y j H = 3、负载特性 当传感器安装到被测物体上或进入被测介质,要从物体与介质中吸收能量或产生干扰,使被测物理量偏离原来的量值,从而不可能实现理想的测量,这种现象称为负载效应。这种效应不仅发生在传感器和被测物体之间,还存在于测量系统的各个环节。对于电路间的级联来说,负载效应的程度决定于前级的输出阻抗和后级的输入阻抗。测量系统的负载特性是其固有特性,在进行测量或组成测量系统时,要考虑这种特性并将其影响降到最小。
% 3-D FDTD code with PEC boundaries %*********************************************************************** % % Program author: Susan C. Hagness % Department of Electrical and Computer Engineering % University of Wisconsin-Madison % 1415 Engineering Drive % Madison, WI 53706-1691 % 608-265-5739 % hagness@https://www.doczj.com/doc/473577275.html, % % Date of this version: February 2000 % % This MATLAB M-file implements the finite-difference time-domain % solution of Maxwell's curl equations over a three-dimensional % Cartesian space lattice comprised of uniform cubic grid cells. % % To illustrate the algorithm, an air-filled rectangular cavity % resonator is modeled. The length, width, and height of the % cavity are 10.0 cm (x-direction), 4.8 cm (y-direction), and % 2.0 cm (z-direction), respectively. % % The computational domain is truncated using PEC boundary % conditions: % ex(i,j,k)=0 on the j=1, j=jb, k=1, and k=kb planes % ey(i,j,k)=0 on the i=1, i=ib, k=1, and k=kb planes % ez(i,j,k)=0 on the i=1, i=ib, j=1, and j=jb planes % These PEC boundaries form the outer lossless walls of the cavity. % % The cavity is excited by an additive current source oriented % along the z-direction. The source waveform is a differentiated % Gaussian pulse given by % J(t)=-J0*(t-t0)*exp(-(t-t0)^2/tau^2), % where tau=50 ps. The FWHM spectral bandwidth of this zero-dc- % content pulse is approximately 7 GHz. The grid resolution % (dx = 2 mm) was chosen to provide at least 10 samples per % wavelength up through 15 GHz. % % To execute this M-file, type "fdtd3D" at the MATLAB prompt. % This M-file displays the FDTD-computed Ez fields at every other % time step, and records those frames in a movie matrix, M, which % is played at the end of the simulation using the "movie" command. %
第三章线性系统的时域分析法 一、教学目的与要求: 对本章的讲授任务很重,要使学生通过本章的学习建立起分析系统特性的概念及方法,围绕控制系统要解决的三大问题,怎样从动态性能、稳态性能及稳定性三方面衡量控制系统,要求学生掌握一阶、二阶系统的典型输入信号响应,参数变化对系统性能的影响,尤其是二阶系统参数与特征根的关系,系统稳定性的概念与判据方法,精度问题,即稳态误差的分析与求法。 二、授课主要内容: 本章着重讨论标准二阶系统的阶跃响应,明确系统的特征参数与性能指标的关系。通过对系统阶跃响应的分析,明确系统稳定的充要条件,掌握时域判稳方法。 1.系统时间响应的性能指标 1)典型输入信号 2)动态过程与稳态过程 3)动态性能与稳态性能 2.一阶系统的时域分析 3.二阶系统的时域分析 1)二阶系统数学模型的标准形式 2)二阶系统的瞬态响应和稳态响应 3)系统参数与特征根及瞬态响应的关系 4.高阶系统的时域分析 1)高阶系统的单位阶跃响应 2)闭环主导极点 5.性系统的稳定性分析 1)系统稳定的充分必要条件 2)劳斯—赫尔维茨稳定判据 6.线性系统的稳态误差计算 1)误差与稳态误差
2)系统类型与静态误差系数 (详细内容见讲稿) 三、重点、难点及对学生的要求(掌握、熟悉、了解、自学) 重点:二阶系统的特点,劳斯稳定判据,稳态误差。 难点:二阶系统阶跃响应与特征根及参数ζ和ωn的关系。 要求: 1.掌握一阶系统对典型试验信号的输出响应的推导,理解系统参数T和K的物 理意义。 2.重点掌握不同二阶系统阶跃响应的特点,及阶跃响应与特征根在根平面位置 之间的关系;理解系统参数ζ和ωn的物理意义。 3.掌握控制系统阶跃响应性能指标的含义,以及计算二阶欠阻尼系统性能指标 的方法。 4.掌握劳斯稳定判据判别系统稳定性的方法。 5.理解系统稳态误差与系统的“型”及输入信号的形式之间的关系。 6.理解高阶系统主导极点的概念,以及高阶系统可以低阶近似的原理。 7.了解根据系统的阶跃和脉冲响应曲线获得系统数学模型的方法。 四、主要外语词汇 时域分析法 time scale analytical method 根轨迹法 root-locus plot method 频域分析法 phase scale analytical method 性能指标 performance specification 高阶系统 higher-order system 稳定性 stability 劳思-赫尔维茨判据 routh’s stability criterion 稳态误差 stability error 误差系数 error parameter 五、辅助教学情况(见课件) 六、复习思考题