
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
一前言
(一)自动行车落锁系统概述
自动行车落锁系统是汽车在启动行驶后,达到预订车速后,车门自动落锁的一项技术。目的是为了防止乘客在汽车行驶途中误开车门而发生坠落事故,尤其是未成年人或其他需要监护的乘员容易误开车门,造成这种事故。有了这套装置,当汽车启动后行驶后,到达一定车速,车门就会被自动锁上,从而有效防止了车内乘员在行驶途中误开车门而造成坠落伤害。
(二)当前技术情况
目前该技术在国外高级汽车上应用广泛,方便实用,并受到广大消费者的好评。在国内,也有多数汽车采用该技术,并且功能更加强大。比如说在落锁的同时自动落窗
(三)基本原理
汽车启动情况下,车速传感器传出车速信号,经AD转换器转换成数字信号,传送给单片机,经单片机计算,超过预订数值,立刻发出落锁信号,落锁信号经DA转换器转换成模拟信号,传送给落锁驱动电机,从而完成落锁动作。
(四)设计内容及要求
1. 分析自动行车落锁系统的工作原理
2. 功能实现:实现汽车在启动并行驶后速度达到30km/h以上时自动落锁功
能
3. 组装自动行车落锁系统电路
4. 画出自动行车落锁系统电路原理图,写出设计说明书
5. 画出元器件布置图
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
二自动行车落锁系统的基本组成原理及单元电路的设计
(Ⅰ)自动车速检测功能
常用的车速传感器包括电磁感应式、霍尔效应式、光电式等,不管哪种形式的车速传感器,其采集信号处理电路的设计是非常重要的。
传感器采集到的信号必须经过处理转变为数字信号才能在汽车的中央控制器中进行处理,进而进行速度的分析和控制。因此设计两个部分,一是模拟信号的转换问题,即将模拟信号转换成数字信号,二是对数字信号的处理问题,即通过编程实现对速度的测量和对与车速有关的物理量处理。
1.1车速信号采集处理的硬件电路
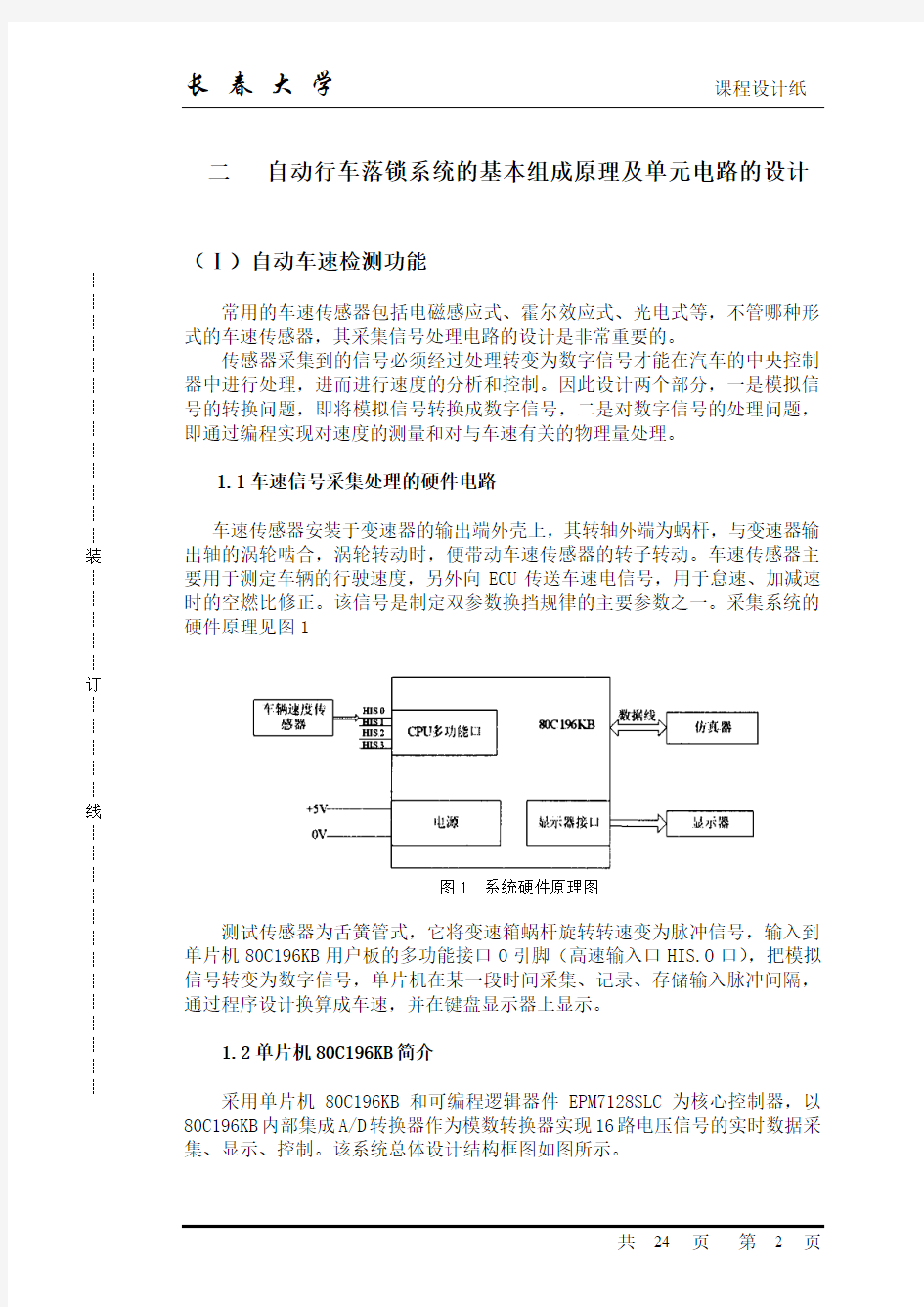
车速传感器安装于变速器的输出端外壳上,其转轴外端为蜗杆,与变速器输出轴的涡轮啮合,涡轮转动时,便带动车速传感器的转子转动。车速传感器主要用于测定车辆的行驶速度,另外向ECU传送车速电信号,用于怠速、加减速时的空燃比修正。该信号是制定双参数换挡规律的主要参数之一。采集系统的硬件原理见图1
图1 系统硬件原理图
测试传感器为舌簧管式,它将变速箱蜗杆旋转转速变为脉冲信号,输入到单片机80C196KB用户板的多功能接口O引脚(高速输入口HIS.O口),把模拟信号转变为数字信号,单片机在某一段时间采集、记录、存储输入脉冲间隔,通过程序设计换算成车速,并在键盘显示器上显示。
1.2单片机80C196KB简介
采用单片机80C196KB和可编程逻辑器件EPM7128SLC为核心控制器,以80C196KB内部集成A/D转换器作为模数转换器实现16路电压信号的实时数据采集、显示、控制。该系统总体设计结构框图如图所示。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
图2 系统总体设计结构框图
整个系统主要由信号预处理、信号选通、单片机采集、双机数据传输以及数据处理显示等模块构成。其中,信号选通模块由CPLD和多路模拟选择器组成。
1.2.1信号预处理电路
由于待采集电压信号输入动态范围较宽,且极性各异,对于单片机A/D转换器来说,需要调理到能够采集的电压范围闱0~5 V,所以要统一调理采集信号,如图所示
图3 信号预处理电路
图3中运放LM224和MC1556均采用双电压供电,以提高动态信号输入范围;电阻均采用精度为0.1%的精密型金属膜电阻,以提高电压转换精度。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
在二级电压凋理过程中,MC1556同相输人端采用稳压电路以减少长时间通电情况下温度升高对系统产生的不良影响。南于电压跟随器具有输入阻抗大和输出驱动能力强的特点,故在预处理电路的输入端和输出端均采用电压跟随电路。
1.2.2信号选通电路
ADG508A是一款8通道CMOS模拟多路选择器,具有高速转换速度和低内阻特性,通道切换具有防短路功能。在CPLD控制下,它可对采集信号进行有序通道切换,配合单片机进行数据采集。
EPM7128SLC是一款Ahera公司生产的CPLD,其容量为128个宏单元,采用硬件描述语言VHDL对CPLD编程设置实现信号的选通控制。首先编写分频器模块对1 MHz晶体振荡器进行20分频,输出2路相位相错、周期为20 μs的矩形同步信号。其中一路信号经D触发器进行2分频,得到占空比50%、周期为40μs的方波信号;然后编写信号选通控制模块。此模块根据方波信号和另一路同步信号循环输出控制信号,两模块都在MuxPlus-II环境下开发,CPLD控制信号时序仿真结果如图所示,其中,信号FRM和ROAD是单片机主程序运行的勤务信号;CS1和CS2是2片ADG508A的片选信号:A0、A1和A2则是ADG508A通道选通控制信号。
1.2.3 单片机采集电路
80C196KB是Intel公司生产的一款16位CMOS单片机,片内集成有8路A /D转换器,该转换器包括一个8通道多路模拟开关,采样保持电路和10位A /D转换器。由于该系统外部有多路选择器,故内部无需通道转换,采用一个ACH0通道即可完成数据采集。对于采用12 MHz晶振的单片机系统,完成一次A /D转换需22μs。80C196KB的A/D转换器采用逐次逼近的方法完成模拟量到数字量的转换,基准电压设定非常关键,内部阻容网络将基准电压Vref等分为1 024个阶梯,每级为Vref/1 024 V。通过与基准电压比较,可得到10位数据转换结果,其中基准电压的精度以及稳定度直接影响到测量结果的绝对精度。因此在电路中Vref采用单独电源供电并通过基准稳压源如LM136的5 V提高精度及稳定度。
80C196KB通过判断ROAD信号在其上升沿读取上次A/D转换结果,同时启动A/D转换器转换下一路信号,该单片机用FRM信号作为非屏蔽中断使计数器DXL归零,主程序循环一次,保证对16路通道信号的时分复用采集。单片机80C196KB程序流程如图所示。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
图4 CPLD控制信号时序仿真图
图5 单片机80C196KB程序流程
1.2.4双机数据传输
为达到采集数据的实时可控性,系统设计双机通信接口作为单片机A/D转换数据向计算机传输的通道。计算机采用WDM下的EPP模式通信,速度达500 KB /s~2 MB/s。使用双端口RAM IDT7130作为主要元件,通过通信接口,单片机将A/D转换数据存入双端口RAM中,计算机则实时显示从双端口RAM中读取的数据。单片机通过双端口RAM IDT7130的A端口进行写操作,计算机则通过B 端口进行读操作。握手信号由单片机通过对ROAD信号计数产生,二者可异步读写操作,实现数据交换。图6为单片机与计算机接口电路。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
图6 单片机与计算机接口电路
1.3单片机80C196KB的HIS.O口简介
电脉冲信号由80C196KB的HIS.O口检测。HIS为高速输入部件。外部事件的输入无需经由CPU,由部件自动完成。它的基本功能是以定时器T1为时间基准记录外部事件发生的事件及状态。HIS共有4个脚HIS.O~HIS.4,此系统只用到了HIS.O脚,通过设计IOCO寄存器的D0位来选通其作为HIS口的功能。
(Ⅱ)单片机计算
2.1计算方法
常用的速度计算方法有3种:频率法、周期法、多倍周期法。频率法是通过测量给定时间内的轮速脉冲信号个数来计算轮速,周期法通过测量被测脉冲宽度来计算车速。
下面采用的速度采集算法是结合频率法和周期法的有效算法。如图2,设置一个时间闸门Ts,HIS的第一个通道在时间Ts内可以记下每次中断的当前时间并放在时间寄存器HIS_TIME中,HIS_TIME记录下来的时刻是内部定时器1的当前值,当晶振12MHz时,定时器1的内容每167ns增一。用最后一次中断的实时时间减去第一次中断的实时时间即为实际的采样时间Td。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
图7 车速采样算法
2.2软件设计
车速传感器的工作原理是把变速器蜗杆旋转转变为脉冲信号,每旋转一周产生4次脉冲信号。为了检测脉冲信号,同时也能对脉冲信号进行计算,可采用查询法或中断法。查询法即通过查询,确认HIS已记录有效事件后再行读取。另一种是中断法,是利用程序控制的方法,在FIFO溢出或保持寄存器已加载时产生中断,在服务程序中读取HIS中已记录的信息并进行处理,以得到车速并输出到显示器。
这里采用中断法,输入引脚的事件方式采用正负跳变在不同通道采集,下面给出车速信号采集代码:
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊(Ⅲ)自动落锁系统
3.1汽车电控门锁的组成
汽车电控门锁系统主要由控制开关、门锁控制器和门锁执行机构组成
图8 中央门锁系统组成
3.1.1控制开关
(1)门锁控制开关
安装在前左门和右门的扶手上,将开关推向前门是锁门,推向后门是开门。
图9 门锁控制开关
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊(2)钥匙开锁报警开关
用于探测点火钥匙是否插进钥匙门内,当钥匙在钥匙门内,钥匙开锁报警开关接通电话报警;当钥匙离开钥匙门时取消报警,如下图所示
图10 钥匙开锁报警开关
(3)钥匙控制开关
安装在每个前门的钥匙门上,如图所示,当从外面用钥匙门口和关门时,钥匙控制开关便发出开门或锁门的信号给门锁ECU。
图11 钥匙控制开关
(4)行李箱门开启器开关
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
位于仪表板下面,拉动此开关便能打开行李箱门,如图所示,钥匙门靠近行李箱门开启器,推压钥匙门,断开行李箱内主开关,此时再拉开开启器开关也不能打开行李箱门。将钥匙插进钥匙门内顺时针旋转打开钥匙门,当主开关再次接通,便可用行李箱门开启器打开行李箱。
图12 行李箱门开启器开关
(5)门控开关
用于探测车门的开闭情况。车门打开时,门控开关接通;车门关闭时,门控开关断开
(6)开锁门关
用于检测车门的开闭情况。当车门关闭,门锁开关断开;车门开启,门锁开关接通。
3.1.2门锁控制器
有晶体管式门锁控制器、电容式门锁控制器和车速感应式门锁控制器。
(1)晶体管式门锁控制器
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
门锁控制器内部设有闭锁和开锁两个继电器,由晶体管开关电路控制,利用电容器的充放电过程,控制一点的脉冲电流持续时间,使门锁执行机构完成闭锁和开锁动作。如下图:
图13 晶体管式门锁控制器
(2)电容式门锁控制器
该系统利用充足电的电容器,在工作时继电器(开锁或闭锁继电器)串联接入电容器的放电回路,使其触电短时间闭合。当(正向或反向)转动车门钥匙时,相应的电路开关(闭锁或开锁)接通,电容器放电电流通过继电器线圈(开锁或闭锁继电器)搭铁,线圈产生电磁吸力,触电闭合,接通执行机构电磁线圈的电路,完成闭锁或开锁的动作。当电容器放电完毕后,继电器触电打开,中央门锁系统停止工作。此时另一只电容器被充电,为下一次操纵做好准备,如下图
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
图14 电容式门锁控制器
(3)车速感应式中央门锁系统电路
在中央门锁系统中加装一车速(20km/h)感应开关,当汽车行驶速度达20km/h以上时候,若车门未闭锁,不需驾驶员操纵,门锁控制器将自动关闭。每个门可单独进行门锁,系统电路如下:
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
图15 车速感应式中央门锁系统电路
3.1.3执行机构
一般采用电磁铁或微型电动机控制。
以电磁铁式自动车门锁为例,结构如下,分别用来开启、所逼门锁。门锁集中操作按钮,平时处于中间位置,用手按压即可开启或锁闭车门。
图16 电磁铁结构
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊3.2电控门锁工作原理
电控门锁的作用是通过电磁铁机构或电动机式机构开打开及锁止车门所。由门锁执行机构及联动机构、门锁控制开关、门锁控制继电器等主要部分组成。
3.2.1电控门锁控制原理
下图示出了中央控制电控门锁电路图,工作过程如下:
当按下车门锁止开关时,电流由蓄电池—熔断器—D5—T1—R3—D1—C1—锁止开关—搭铁。在C1通电的瞬间,T1导通,T2导通,继电器触电被吸到位置,这样,电流由蓄电池—熔断器—1—K1 ON—2—N—3—K2 off—4—搭铁,回转式电磁线圈正向通电,电磁吸力拉下车门锁扣杠杆,锁住车门。C1 充电完毕,N1 断电,K1 回到off 位置。
当要打开车门时,按下开锁开关,N2 通电,将K2 吸到ON 的位置,电流由蓄电池—熔断器—1—K2 ON)—3—N—2—K1 off)—4—搭铁。由于通过回转式电磁线圈的电流方向与车门锁止时相反,车门锁扣杠杆回到原位,车门打开。由于车型不同,实际电路也不相同,比如有的还增设了车速感应控制电路等。
N1、N1—继电器线圈K1、K1 —继电器触点N—回转式电磁线圈
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
图17 电控门锁控制电路
图18 门锁控制系统电路
1—蓄电池2—易熔线(ALT)3—易熔线(AMI)4—线路断路器5—点火开关6—ECUIG 保险7—驾驶员门锁电动机和位置开关8—副驾驶门锁电动机和位置开关9—左后门锁
电动机和位置开关10—右后门锁电动机和位置开关11—门锁控制继电器12—驾驶员门控灯开关13—副驾驶员门控灯开关14—驾驶员钥匙控制开关15—副驾驶员钥匙控制开关16—驾驶员门锁控制开关17—副驾驶员门锁控制开关18—钥匙开锁报警开关19—
行李箱门开启器开关20—行李箱门开启器电磁阀
丰田威驰轿车电动锁门电路如下图
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
图19 丰田威驰轿车电动锁门电路
3.2.2门锁操纵原理
在车门开启和闭锁的操纵机构中,通常采用动力车门锁定的装置。
门锁执行机构如图所示。在门锁总成中,由锁止杆控制转动,决定门锁开/闭状态。“位置开关”用于测定锁止杆是否进行门锁开/闭;“门锁开关”则是用于检测锁止机构是否进行门锁的开/闭。此外,锁止杆随着门锁电动机的通电,正向/逆向旋转;或把钥匙插入锁孔中,用于操纵。也可按车厢内的按钮进行多种操作。当“门锁开关”用于操作钥匙,使它向开启/关闭方向转动时才能输出
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊信号。
图20 电机式门锁执行机构
3.3电动门锁电路的检测
以丰田威驰轿车为例
(一)故障诊断表
对于威驰轿车电动门锁电路故障,可按下表,根据故障现象找到故障点。
表1 丰田威驰轿车故障现象与故障点
(二)检查门锁控制继电器总成(ECU端子)
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
表2 门锁控制继电器总成(ECU端子)
(1)断开门锁控制继电器连接器D4,检查线束一侧连接器每个端子的电压和导通情况,其标准应符合下表要求。如果不符合标准,可能是线束一侧有故障。
表3 线束一侧连接器每个端子的电压和导通情况标准
(2)重新连接门锁控制继电器连接器D4,检查连接器每个端子的电压,其标准应符合下表。如果结果不符合标准,车辆可能有故障。此时,检查门锁控制继电器和蓄电池之间的线束、连接器和熔断丝。如果有必要进行修理或更换
表4 连接器每个端子的电压的标准
(3)主开关、驾驶员侧车锁不能控制所有车门的上锁和开锁故障的检查电路参看下图,检查程序如下:
1)检查主开关或门锁操作
如果用驾驶员侧车门锁不能进行手动上锁/开锁操作,转到步骤4);如果用主开
关不能进行手动上锁/开锁操作,转到下一步骤
2)检查电动车窗调节器主开关总成,如下图
①拆下主开关
②检查门锁控制开关导通性其标准应符合下表要求
如果不正常,更换电动车窗调节器主开关总成;如果正常,转到下一步骤
3)检查线束(电动车窗调节器主开关总成)如下图
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊
图21 电动车窗调节器主开关总成
表5 门锁控制开关导通性其标准
图22 电动车窗调节器主开关总成
①断开D10电动车窗主开关连接器
②断开D4门锁控制继电器连接器
③检查线束一侧连接器的导通性,其标准应符合下表所示
表6 线束一侧连接器的导通性
如果不正常,修理或更换线束和连接器;如果正常,更换门锁控制继电器总成。4)检查左侧前门锁总成
①加蓄电池电压,检查门锁电机的动作,如下图,其检查标准符合下表
自动驾驶汽车硬件系统概述 自动驾驶汽车的硬件架构、传感器、线控等硬件系统 如果说人工智能技术将是自动驾驶汽车的大脑,那么硬件系统就是它的神经与四肢。从自动驾驶汽车周边环境信息的采集、传导、处理、反应再到各种复杂情景的解析,硬件系统的构造与升级对于自动驾驶汽车至关重要。 自动驾驶汽车硬件系统概述 从五个方面为大家做自动驾驶汽车硬件系统概述的内容分享,希望大家可以通过我的分享,对硬件系统的基础有个全面的了解: 一、自动驾驶系统的硬件架构 二、自动驾驶的传感器 三、自动驾驶传感器的产品定义 四、自动驾驶的大脑 五、自动驾驶汽车的线控系统
自动驾驶事故分析 根据美国国家运输安全委员会的调查报告,当时涉事Uber汽车——一辆沃尔沃SUV系统上的传感器在撞击发生6s前就检测到了受害者,而且在事故发生前1.3秒,原车自动驾驶系统确定有必要采取紧急刹车,此时车辆处于计算机控制下时,原车的紧急刹车功能无法启用。于是刹车的责任由司机负责,但司机在事故发生前0.5s低头观看视频未能抬头看路。 从事故视频和后续调查报告可以看出,事故的主要原因是车辆不在环和司机不在环造成的。Uber在改造原车加装自动驾驶系统时,将原车自带的AEB功能执行部分截断造成原车ADAS功能失效。自动驾驶系统感知到受害者确定要执行应急制动时,并没有声音或图像警报,此时司机正低头看手机也没有及时接管刹车。
目前绝大多数自动驾驶研发车都是改装车辆,相关传感器加装到车顶,改变车辆的动力学模型;改装车辆的刹车和转向系统,也缺乏不同的工况和两冬一夏的测试。图中Uber研发用车是SUV车型自身重心就较高,车顶加装的设备进一步造成重心上移,在避让转向的过程中转向过急过度,发生碰撞时都会比原车更容易侧翻。 自动驾驶研发仿真测试流程 所以在自动驾驶中,安全是自动驾驶技术开发的第一天条。为了降低和避免实际道路测试中的风险,在实际道路测试前要做好充分的仿真、台架、封闭场地的测试验证。 软件在环(Software in loop),通过软件仿真来构建自动驾驶所需的各类场景,复现真实世界道路交通环境,从而进行自动驾驶技术的开发测试工作。软件在环效率取决于仿真软件可复现场景的程度。对交通环境与场景的模拟,包括复杂交通场景、真实交通流、自然天气(雨、雪、雾、夜晚、灯光等)各种交通参与者(汽车、摩托车、自行车、行人等)。采用软件对交通场景、道路、以及传感器模拟仿
人工智能在自动驾驶应用中的5大关键技术分析 随着技术的快速发展云计算、大数据、人工智能一些新名词进入大众的视野,人工智能是人类进入信息时代后的又一技术革命正受到越来越广泛的重视。作为人工智能技术在汽车行业、交通领域的延伸与应用,无人驾驶近几年在世界范围内受到了产学界甚至国家层面的密切关注。 自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。自动驾驶技术将成为未来汽车一个全新的发展方向。 本文将主要介绍人工智能技术在自动驾驶中的应用领域,并对自动技术的发展前景进行一个简单的分析。 人工智能是一门起步晚却发展快速的科学。20 世纪以来科学工作者们不断寻求着赋予机器人类智慧的方法。现代人工智能这一概念是从英国科学家图灵的寻求智能机发展而来,直到1937年图灵发表的论文《理想自动机》给人工智能下了严格的数学定义,现实世界中实际要处理的很多问题不能单纯地是数值计算,如言语理解与表达、图形图像及声音理解、医疗诊断等等。 1955 年Newell 和Simon 的Logic Theorist证明了《数学原理》中前52 个定理中的38 个。Simon 断言他们已经解决了物质构成的系统如何获得心灵性质的问题( 这种论断在后来的哲学领域被称为“强人工智能”) ,认为机器具有像人一样逻辑思维的能力。1956 年,“人工智能”( AI) 由美国的JohnMcCarthy 提出,经过早期的探索阶段,人工智能向着更加体系化的方向发展,至此成为一门独立的学科。 五十年代,以游戏博弈为对象开始了人工智能的研究;六十年代,以搜索法求解一般问题的研究为主;七十年代,人工智能学者进行了有成效的人工智能研究;八十年代,开始了不确定推理、非单调推理、定理推理方法的研究;九十年代,知识表示、机器学习、分布式人工智能等基础性研究方面都取得了突破性的进展。 人工智能在自动驾驶技术中的应用概述人工智能发展六十年,几起几落,如今迎来又一次
. 无人驾驶汽车 自动驾驶汽车,又称为无人驾驶汽车、电脑驾驶汽车、或轮式移 自动动机器人,是一种透过电脑系统实现无人驾驶的智能式的汽车。、监控装置和全球定位系统、视觉计算、驾驶汽车依靠人工智能雷达自动安全地操让电脑可以在没有任何人类主动的操作下,协同合作,还没有批准作商现时自动驾驶技术正在研究及测试中,作机动车辆。业营业或私人使用。国内首款无年代开始,美国、英国、德国等发达国20从世纪70在可行性和实用化方面人驾驶汽车家开始进行无人驾驶汽车的研究,年代开始进行无人驾驶汽世纪80都取得了突破性的进展。中国从20年成功研制出中国第一辆真正意义1992车的研究,国防科技大学在上的无人驾驶汽车。 2005年,首辆城市无人驾驶汽车在上海交通大学研制成功, 世界上最先进的无人驾驶汽车已经测试行驶近五十万公里,其中最后八万公里是在没有任何人为安全干预措施下完成的。 无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。 它是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。 ;.
视觉计算等众多技术于一体,体系结构、人工智能、集自动控制、也是衡量智能控制技术高度发展的产物,是计算机科学、模式识别和在国防和国民经济领一个国家科研实力和工业水平的一个重要标志, 域具有广阔的应用前景。安全是拉动无人驾驶车需求增长的主要因素。每年,防抱死制动汽车既然驾驶员失误百出,驾驶员们的疏忽大意都会导致许多事故。驾驶系无人制造商们当然要集中精力设计能确保汽车安全的系统。还有些活像是科幻小说中,其中有些根本算不上统种类繁多,无人的东西。其实就算无人驾驶系统。虽然防抱死制动器 需要防抱死制动系统因为驾驶员来操作但该系统仍可作为无人驾驶 系统系列的一个代表,不具备防抱防抱死制动系统的部分功能在过去需要驾驶员手动实现。死系统的汽车紧急刹车时,轮胎会被锁死,导致汽车失控侧滑。驾驶驾驶员要反复踩踏制动踏板来防止轮胎锁没有防抱死系统的汽车时,并且比手动操作效而防抱死系统可以代替驾驶员完成这一操作--死。果更好。该系统可以监控轮胎情况,了解轮胎何时即将锁死,并及时防抱死制动系统而且反应时机比驾驶员把握得更加准确。做出反应。是引领汽车工业朝无人驾驶方向发展的早期 技术之一。另一种无人驾驶系统是牵引或稳定控制系统。这些系统不太引人牵引和稳定注目,通常只有专业驾驶员才会意识到它们发挥的作用。;. .
无人驾驶汽车 自动驾驶汽车,又称为无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种透过电脑系统实现无人驾驶的智能式的汽车。自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。现时自动驾驶技术正在研究及测试中,还没有批准作商业营业或私人使用。 都取得了突破性的进展。中国从20世纪80年代开始进行无人驾驶汽车的研究,国防科技大学在1992年成功研制出中国第一辆真正意义上的无人驾驶汽车。 2005年,首辆城市无人驾驶汽车在上海交通大学研制成功, 世界上最先进的无人驾驶汽车已经测试行驶近五十万公里,其中最后八万公里是在没有任何人为安全干预措施下完成的。 无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。 它是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。
集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,也是衡量一个国家科研实力和工业水平的一个重要标志,在国防和国民经济领域具有广阔的应用前景。 防抱死制动安全是拉动无人驾驶车需求增长的主要因素。每年,驾驶员们的疏忽大意都会导致许多事故。既然驾驶员失误百出,汽车制造商们当然要集中精力设计能确保汽车安全的系统。"无人"驾驶系统种类繁多,其中有些根本算不上"无人",还有些活像是科幻小说中的东西。 防抱死制动系统其实就算无人驾驶系统。虽然防抱死制动器需要驾驶员来操作但该系统仍可作为无人驾驶系统系列的一个代表,因为防抱死制动系统的部分功能在过去需要驾驶员手动实现。不具备防抱死系统的汽车紧急刹车时,轮胎会被锁死,导致汽车失控侧滑。驾驶没有防抱死系统的汽车时,驾驶员要反复踩踏制动踏板来防止轮胎锁死。而防抱死系统可以代替驾驶员完成这一操作--并且比手动操作效果更好。该系统可以监控轮胎情况,了解轮胎何时即将锁死,并及时做出反应。而且反应时机比驾驶员把握得更加准确。防抱死制动系统是引领汽车工业朝无人驾驶方向发展的早期技术之一。 另一种无人驾驶系统是牵引或稳定控制系统。这些系统不太引人注目,通常只有专业驾驶员才会意识到它们发挥的作用。牵引和稳定
汽车自动驾驶系统 ----模糊控制的工程应用 姓名:冯皓伟 学号:09001214 专业:自动化
汽车自动驾驶模糊控制 摘要: 针对车辆动力学控制系统所具有的强非线性特点提出了基于机器视觉的车辆自动驾驶模糊控制方案. 采用车辆系统动力学模型, 通过模糊控制规则的量化划分对车辆在道路上的运动进行了仿真.仿真的结果显示, 本方案可以很好地解决空旷道路上的车辆自动驾驶问题, 并且该控制方法可以保证车辆快速准确地在道路上安全高速行驶, 具有很好的鲁棒性.此外,还可以基于模糊逻辑和滑模控制理论设计一种车辆纵向和横向运动综合控制系统。该控制系统通过对前轮转向角度、发动机节气门开度、制动液压及主动横摆力矩进行协调控制, 使车辆能够以期望速度在理想道路轨迹上行驶, 并提高车辆在行驶过程中的操纵稳定性。 关键字: 车辆自动驾驶机器视觉模糊控制规则模糊逻辑滑膜控制仿真 引言: 模糊控制是上个世纪诞生的一种基于语义规则的人工智能,是以模糊集合理论为基础的一种新兴控制手段,它是模糊集合理论和模糊技术与自动控制技术相结合的产物。随着时代的发展,科技的创新,模糊理论在控制领域取得了广泛的应用。自动驾驶便是其中一个重要的应用对象。 汽车是现代的主要交通工具,自动驾驶系统是交通体系中最重要的部分之一,一方面它可以推动在机器人自主导航方面的研究进程,在航天和水下机器人的应用中起到重要的作用;另一方面这种技术在未来的智能交通系统中的运用既可以避免驾驶员因判断和交通失误而引起的交通事故,提高交通系统效率,又可以最终实现无人驾驶。汽车自动驾驶是一个比较复杂的问题,难以建立精确的数学模型,如果采用模糊控制器,通过一些不精确的观察,执行一些不精确的控制,这个问题就容易解决。 模糊控制原理: 1.车辆的运动模型 现在假设汽车在某处行驶,我们需要达到的目标是:设计一个基于模糊控制的汽车自动驾驶系统,使得无论汽车的起始点在哪儿,汽车都能自动驾驶到设定的目标位置。其中,汽车的任意时刻的位置可以通过GPS获得。根据模糊规则进行推理,选择一条最优的行驶路线达到目标位置。 车辆的系统动力学模型如图1所示 : XOY是地面固定的直角坐标系,V?OcV?为车辆的相对坐标系,V?为车辆的纵向速度, V?为车辆的横向速度. θ为车辆与y 轴的夹角, 到y 轴逆时针为正, 顺时针为负. 对地面固定的坐标系xoy, 车辆的运动模型为
农机使用与维修 2011'年第1期汽车自动驾驶系统研究设计 辽宁铁岭师范高等专科学校杨学清 摘要本设计是基于电子油门的汽车,设计的一款自动控制系统。本系统能智能控制电子油门的大小,以达到 自动驾驶的目的。对于长途驾驶或者汽车的自动驾驶模式的研究探讨具有重要意义。 关键词电子油门自动驾驶定速巡航 Electroniccircuitdesigncruise YangXueqing AbstradThedesignisbased onthe electronicthrottlecars,designedanautomaticcontrolsystem.Thesystemcanintel- ligentcontrolthesizeofelectronicthmtdetoachievethepurposeoftheautopilot.Forlong—distancedrivingordrivingan automaticcarstudymodelhasimportantsignificance. KeywordsElectronicthrottleAutopilotCruise 1自动驾驶系统简介 自动驾驶系统是使汽车工作在发动机有利转带范围内,减轻驾驶员的驾驶操纵劳动强度,提高行驶舒适性的汽车自动行驶装置。自动驾驶系统英文为cruisecontrolsystem,缩写为CCS。自动驾驶系统又称为巡航行驶装置、速度控制系统、恒速行驶系统或 汽车自动驾驶系统设计附图巡行控制系统等。 巡航控制系统自1961年在美国首次应用以来,已经广泛普及。在美国大多数轿车上均装用过巡航控制系统。日本和欧洲生产的轿车装用定速自动驾驶系统的比例也越来越高。我国一汽大众生产的奥迪A6、上海大众帕萨特以及广州本田雅阁等也装了巡航控制系统。 在大陆型的国家,驾驶汽车长途行驶的机会较多,在高速公路上长时间行驶时,打开该 系统的自动操纵开关后,巡航控制系统将根据 行车阻力自动增减节气门开度,使汽车行驶速 度保持一定。汽车在一定条件下恒速行驶,大 大地减轻了驾驶员的疲劳强度。由于巡航控 制系统能自动地维持车速,避免了不必要的油 门踏板的人为变动,进而改善了汽车的燃料经 济性和发动机的排放性。基本功能是自控油 门、解放右脚、驾驶轻松;调节精神,缓解疲劳, 增加安全系数。经济定速、省油、省车。万方数据
2018年自动驾驶之控制执行研究报告
内容目录 一、总论:控制执行系统随电子化、电动化、自动驾驶的发展而升级 (4) 二、制动:制动系统电子化是自动驾驶的必由之路 (6) 2.1 制动系统发展历程及电子化趋势 (6) 2.2 市场空间大,电子液压制动系统为主要增长点 (10) 2.3 制动系统主要供应商,博世大陆领先,国内产商从零部件入局 (11) 三、转向:电动助力转向占据主流,未来方向为线控系统 (16) 3.1转向系统的发展路径及EPS和线控趋势 (16) 3.2 市场规模平稳增长,电动助力转向系统为主要增量 (20) 3.3 转向系统主要供应商,捷泰格特领头,国内产商进入电动转向系统 (21) 四、智能传动 (24) 4.1 轮毂电机 (24) 4.2 轮毂电机优缺点 (24) 五、投资建议 (25) 5.1 拓普集团 (25) 5.2 耐世特 (25) 5.3 华域汽车 (26) 六、风险提示 (28) 图表目录 图表1:自动驾驶系统结构 (4) 图表2:电子液压制动系统国内市场空间(亿元) (5) 图表3:电动助力转向系统国内市场空间(亿元) (5) 图表4:车辆纵向控制 (6) 图表5:车辆制动系统 (6) 图表6:车辆制动系统发展历程 (7) 图表7:液压真空制动 (7) 图表8:液压真空制动结构 (7) 图表9:真空液压制动的优缺点 (8) 图表10:真空助力液压系统结构 (8) 图表11:真空助力液压制动的优缺点 (8) 图表12:电动助力器液压制动系统结构 (9) 图表13:西门子 VDO EMB线控机械制动系统 (9) 图表14:EMB线控机械制动系统组成和功能 (9) 图表15:电子机械制动(EMB)制动的优缺点 (9) 图表16:电子液压制动系统国内市场空间(亿元) (10) 图表17:我国汽车制动系统竞争格局 (10) 图表18:博世iBooster EHB系统 (11)
美交通部发布最新自动驾驶汽车指南(附全文) 具体来说,美国交通运输部的《自动驾驶系统2.0:安 全愿景》将: 专注SAE 3 级到5 级自动驾驶系统,即有条件的自动驾驶、高度自动驾驶和完全自动驾驶系统;澄清监管流程,明确企业无需等待,可以立即开始自动驾驶系统的测试与部署;从安全自我评估中剔除不必要的无关设计元素;比对最新发展和行业术语,对联邦指南进行同步更新;明确联邦政府和州政府将在未来自动驾驶系统发展中各自扮演的角色。 在该指南的引言中,交通运输部局长赵小兰女士提到,“美国交通运输部将制定一个政策性框架,鼓励自动驾驶汽车技术的安全开发、测试与部署,而非制造阻碍,不断发展并最终实现安全的交通移动出行未来。”相应的,交通运输部将发布《安全愿景》,通过对自动驾驶系统的支持和发展,推动全 美交通运输系统在安全性、机动性和效率方面取得提升。 赵小兰局长补充道,联邦政府最看重的是自动驾驶汽车的安全效益。她表示,“美国交通运输部将制定一个政策性框架,鼓励自动驾驶汽车技术的安全开发、测试与部署,而非制造阻碍。” 交通运输部表示,《自动驾驶系统2.0:安全愿景》将取代去年出台的《联邦自动驾驶汽车政策》(Federal Automated
Vehicle Policy),这是国会参众两院共同努力的成果。就在 交通部出台《自动驾驶系统2.0:安全愿景》之前,美国众 议院正在考虑通过一项名为《自动驾驶法案》(SELF DRIVE ACT) 的法案,为自动驾驶汽车的发展建立一个稳定、宽容的监管框架。交通运输部的最新指南主要涉及(依据先前已被联邦政府采纳的)SAE自动驾驶分类的3~5级的相关技术。明确联邦政府和州政府的各自责任范围 《自动驾驶系统2.0:安全愿景》用两个主要章节介绍了交 通部对自动驾驶汽车安全性的态度,并采用了联邦政府认可的SAE 自动驾驶汽车等级划分。从本质而言,交通运输部对自动驾驶系统的定义为:SAE 3 级到5 级自动驾驶系统中涉及的全部系统。 《自动驾驶系统2.0:安全愿景》的第一章题为“自主驾驶系统的自愿性指导规定”(Voluntary Guidance for Automated DrivingSystems),介绍了十多个“必须优先考虑安全设计元素”,包括车辆网络安全、人机接口、耐撞性、消费者教育和培训,及碰撞后驾驶员辅助系统等。 文件第二章为“各州技术援助:立法机关的自动驾驶系统最佳做法” (Technical Assistance toStates, Best Practices for Legislatures Regarding Automated Driving Systems)。本章内容要求“清晰划定联邦政府和各州政府在驾驶员辅助系统 监管中发挥的不同作用”,并强调“美国高速公路安全管理局
人工智能在车辆自动驾驶中的应用 王洪升,曾连荪,田蔚风 (上海交通大学电信学院导航与控制研究所,上海200030) 摘要:本文提出了一种新的基于人工智能的感知/计划/动作agent结构实现智能车辆自动驾驶的方案。首先通过描述该结构的原理说明该结构可以解决自动驾驶中存在的一些问题,接着通过建立自动驾驶知识库阐述如何具体实现自动驾驶,最后通过仿真实验验证了该方法能够为智能车辆实现自动或辅助驾驶提供一种非常有效的机制。 关键词:智能交通系统;人工智能;智能车辆;自动驾驶;知识库 中图分类号:TP18文献标识码:A文章编号:1003-7241(2004)06-0005-04 Application of Artificial Intelligence in Autom atic Drive for Intelligent Vehicles WANG Hong-sheng,ZENG Lian-sun,TIA N Wei-feng (Institute of Navigation and Control,Shanghai Jiaotong University,Shanghai200030,China) Abstract:This paper presents an innovative method for implementing automatic drive for i ntelligen t vehicles using Artificial Intelli gence based on the sense/plan/act agent architecture.Theory of the archi tecture is described which explains that some problems in automatic driving can be solved efficiently.The i mplementation of the automatic dri ving using knowledge database based on this archi tecture is discussed.Simulation studies have been conducted to verify that the proposed method can be efficien tly utilized in automatic driving for intelligent vehicles. Key words:Intelligent transportation systems;Artificial i ntelligence;Intelligent vehicles;Automatic driving;Knowledge database 1引言 20世纪80年代后,日益拥挤的交通给人们带来交通堵塞、事故频发、环境污染和危害人类生命财产等一系列的困扰。为了排除这些困扰,集通讯、信息和管理于一体的智能交通系统(ITS)应运而生。 ITS一般由两部分组成,即智能道路及交通控制系统和智能车辆。目前智能道路系统的构建还处于起步阶段,相应的基础设施建设周期长且投资大,所以发展智能车辆及车辆自动驾驶系统,通过提高车辆自身的智能的方案是目前实现安全、高效的自动驾驶的最佳选择,同时它还可以为将来开发完备的自动高速交通网络环境中运行的智能车辆奠定基础。 收稿日期:2003-11-11 车辆自动驾驶系统主要由车辆自动驾驶控制系统和车辆自动路径导引系统组成。其中车辆自动驾驶控制系统对车辆进行横向和纵向的控制,而车辆自动路径导引系统为车辆动态规划最优的路径。近年来,车辆自动驾驶的研究取得了很大的进展,特别是图论法、神经网络法和遗传算法等[1][2][3][4]的应用。其中以Dijkstra算法为代表的图搜索法[2]在各种优化问题中得到了较为广泛的应用,并且这种算法的解是全局最优的。但是这种算法需要建立邻接矩阵,会耗费巨大的存储量,且其计算量与网络结点数目为立方关系。而智能车辆自动驾驶的路径导引要在结点数非常大的数字地图数据库中进行搜索,所以该方法存在计算量大和对计算机存储要求高的缺点。 本文提出将人工智能的基于感知P计划/动作agent结构[5]应用于车辆自动驾驶中,从感知、思维和行为三个层次模拟人为 5 u es of Aut oma tio n&Ap p licat io ns|
基于CBTC控制的列车全自动驾驶系统(FAO)的发展及应用 【摘要】主要介绍全自动驾驶(FAO)系统的发展和应用情况、系统的组成和特点。介绍了车-地通信方案,对国内外车-地通信方式进行了比较,对GSM-R 网络进行了详细的分析,并指出作为无线传输的GSM-R网络具有适应我国铁路运输特点的功能优势。 【关键词】全自动驾驶;基于通信的列车运行控制系统全自动驾驶系统;双向传输;车-地通信;GSM-R 1.引言 全自动无人驾驶系统是一种将列车驾驶员执行的工作,完全由自动化的、高度集中的控制系统所替代的列车运行模式。 目前,国内许多城市都在建设城市轨道交通网络,那些人口在千万以上的特大城市,其发展往往是跨越式的,要求建设的城市轨道交通在互联互通、安全、快捷、舒适性方面具有很高的水平。许多大城市如上海、北京和广州均有计划采用先进的、高可靠的、高安全的基于CBTC(Communication Based Train Contro,基于通信的列车控制系统)控制的全自动驾驶系统(Fully Automatic Operation,FAO)来达到以上要求。 2.FAO的系统结构 FAO系统实现列车的自动启动及自动运行、车站定点停车、全自动驾驶自动折返、自动出入车辆段等功能,同时对列车上乘客状况、车厢状态、设备状态进行监视和检测,对列车各系统进行自动诊断,将列车设备状况及故障报警信息传送到控制中心,对各种故障和意外情况分门别类,做出处置预案。 2.1 信号系统主要包括以下部分 (1)控制中心设备:中央自动列车监督系统(Automatic Train Supervision,ATS)、电力SCADA系统和综合监控系统。(2)轨旁设备:轨旁列车自动防护/列车自动驾驶系统(Automatic Train Protection and Automatic TrainOperation,ATP/ATO)、车站ATS系统、联锁CI系统、定位系统和综合维护系统。(3)车载设备:车载地车无线接收/发送单元、车载ATP/ATO设备、牵引和制动、列车定位系统。(4)地车信息传输系统:一般采用基于通信的多服务的冗余数据传输系统(Data Tansm issionSystem,DCS),实现地车的双向信息传输。目前主要的CBTC系统实现地车信息传输的方式有:交叉环线、泻漏波导/漏缆、无线传输等。(5)列车定位系统:车载速度传感器和雷达传感器对于FAO系统,实现列车安全控制和间隔控制与传统列车自动控制系统(Automatic Train Control,ATC)的基本组成、功能和安全性要求是一样的,特殊的是对这些相关系统的可靠性、可用性及应急预案处理的要求将大大提高
第十一章汽车与自动驾驶系统 ?第一节概述 ?第二节世界智能车辆的研究与发展 ?第三节智能车辆系统结构与微机测控系统 ?第四节基于视觉导航的智能车辆模糊逻辑控制 ?第五节智能车辆的自主驾驶与辅助导航 ?第六节小结
11.1 概述 ?11.1.1 汽车自动驾驶概念 ?是指借助车载设备及路侧、路表的电子设备来检测周围行驶环境的变化情况,进行部分或完全的自动驾驶控制的系统,目的是提高行车安全和道路通行能力。 ?该系统的本质就是将车辆——道路系统中的现代化的通信技术、控制技术和交通信息理论加以集成,提供一个良好的驾驶环境,在特定条件下,车辆将在自动控制下安全行驶。 ?从当前的发展看,可以分为两个层次: 是车辆辅助安全驾驶系统,或者是先进的车辆控制技术; 是自动驾驶系统,或者称为智能汽车,智能汽车在智能公路上使用才能发挥出全部功能,如果在普通公路上使用,它仅仅是一辆装备了辅助安全驾驶系统的汽车。
11.1 概述 ?11.1.2 车辆自动驾驶系统主要目的 防止部分交通事故的发生; 提高道路利用率; 提高驾驶员方便性; 减轻驾驶员负担; 实现车辆的安全高效行驶
11.2 世界智能车辆的研究与发展 ?11.2.1 智能车辆的产生与发展 它的研究始于20世纪50年代初美国Barrett Electronics公司开发出的世界上第一台自动引导车辆系统(Automated Guided Vehicle System,AGVS) 1974年,瑞典的Volvo Kalmar轿车装配工厂与Schiinder-Digitron公司合作,研制出一种可装载轿车车体的AGVS,并由多台该种AGVS组成了汽车装配线,从而取消了传统应用的拖车及叉车等运输工具。 20世纪80年代,伴随着与机器人技术密切相关的计算机。电子、通信技术的飞速发展,国外掀起了智能机器人研究热潮,其中各种具有广阔应用前景和军事价值的移动式机器人受到西方各国的普遍关注
全自动驾驶系统中的通信技术 胡雪瑞 摘要:FAO系统是引导城市轨道交通发展趋势的先进客运交通系统,在世界很多城市得到了应用。本文对城市轨道的全自动驾驶系统进行了分析,并提出了其中的通信方案。 1引言 目前,国内许多城市都在建设城市轨道交通网络,那些人口在千万以上的特大城市,其发展往往是跨越式的,要求建设的城市轨道交通在互联互通、安全、快捷、舒适性方面具有很高的水平。FAO系统是引导城市轨道交通发展趋势的先进客运交通系统,在世界很多城市得到了应用。FAO系统与传统系统相比,具有安全可靠性高、增大线路通过能力、提高旅行速度、减少车辆需求量、减少定员、提高服务、降低系统生命周期成本、易于工程实施和城市路网互联互通等优势。 本文第二部分介绍了FAO系统的特点和它的系统组成,并在第三部分着重介绍了FAO 系统中的通信控制部分。第四部分介绍了FAO系统通信方案的选择,并在第五部分介绍了无线传输GSM-R的原理。 2 FAO系统 无人驾驶系统是指列车驾驶员执行的工作完全自动化的、高度集中控制的列车运行系统。无人驾驶系统具备列车自动唤醒启动和休眠、自动出入停车场、自动清洗、自动行驶、自动停车、自动开关车门、故障自动恢复等功能,并具有常规运行、降级运行、运行中断等多种运行模式。实现全自动运营可以节省能源,优化系统能耗和速度的合理匹配。 全自动驾驶系统(简称FAO,Fully Automatic Operation)要求建设的城市轨道交通在互联互通、安全、快捷、舒适性方面具有很高的水平.20世纪90年代,随着通信、控制和网络技术的发展,可以在地车之间实现大容量、双向的信息传输,为高密度、大运量的地铁系统成为真正意义上的FAO系统提供了可能. FAO系统的主要功能是地车的双向信息传输和运营组织的综合与应急处理.车一地信息传输通道是列车运行自动控制系统的重要组成部分.自动控制系统的车载设备完全靠从地面控制中心接受的行车控制命令进行行车,实时监督列车的实际速度和地面允许的速度指令,当列车速度超过地面行车限速,车载设备将实施制动,保证列车的运行安全。 FAO系统实现列车的自动启动及自动运行、车站定点停车、全自动驾驶自动折返、自动出入车辆段等功能,同时对列车上乘客状况、车厢状态、设备状态进行监视和检测,对列车各系统进行自动诊断,将列车设备状况及故障报警信息传送到控制中心,对各种故障和意外情况分门别类,做出处置预案。目前基于CBTC控制的FAO系统的典型组成下图。 3 FAO中的通信控制部分 在FAO系统中,在传统轨道交通通信系统配置的基础上,将主要增加列车上的电视监控系统、广播系统和应急电话系统,使控制中心能随时监控列车和旅客的情况,保证在紧急情况下能与旅客进行直接通信,并直接对列车下达控制命令,确保旅客的安全。增加的通信系统包括以下部分。 (1)控制中心与旅客双向通信的广播与对讲系统。 (2)专用的信息传输系统,实现列车车辆的状态与控制中心的信息传输,主要包括公共服务信息、CCTV视频监视信息等。
什么是自动驾驶系统? 自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。 自动驾驶系统能做些什么? 在FS2004里,Cessna 和Beechcraft Baron 58 装备的自动驾驶仪具有以下功能: ?保持机翼水平,不发生滚转。 ?保持飞机当前的仰俯角。 ?保持选定的飞行方向。 ?保持选定的飞行高度。 ?保持选定的上升率或下降率。 ?跟踪一个VOR电波射线(Radial)。 ?跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。 ?跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。 ?跟踪一个GPS航路。 GPS 不支持垂直方向制导的自动导航。 在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。这套系增加了以下功能: ?保持一个选定的飞行速度(空速或地速)。 ?消除有害的偏航。 ?帮助飞行员正确的手动控制飞机。 在FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能: ?飞行管理计算机(Flight Management Computers) ?垂直方向导航(Vertical Navigation) ?横向导航(Lateral Navigation) ?飞行水平改变(Flight Level Change) ?机轮控制(Control Wheel Steering) ?自动降落(Autoland) 为什么要使用自动驾驶仪? 有些人认为真正的飞行员是不需要自动驾驶仪的,这个观点是有一点偏颇的,因为适当的使用自动驾驶仪可以减小飞行员工作量,特别是在仪器飞行规则(Instrument Flight Rules)的
汽车自动驾驶系统 姓名: 学号: 班级:
数据采集与模糊控制在自动驾驶汽车的应用 摘要: 自动驾驶汽车是指安装汽车自动驾驶技术的汽车。汽车自动驾驶技术包括可视屏摄像头,雷达传感器,激光雷达,车速传感器,转向角传感器,油门开度传感器和车载计算机等。自动驾驶汽车使用视屏摄像头,雷达传感器,以及激光雷达来了解周围的交通状况,并通过一个详细的地图(通过有人驾驶汽车采集的地图)对前方的道路进行导航。汽车的车速,转向角,油门开度等物理量经相应传感器转化成电信号,摄像头拍摄汽车前方图像并转换成视屏信号,扫描时激光雷达检测汽车下部前方障碍物并转化成电信号,由数据采集器件采集并传至控制器(车载计算机),可以准确的判 断车与障碍物自建的距离,如果遇到紧急情况,车载计算机能够及时的发出警报或者自动刹车进行避让,并且根据道路的状况自己调节行车的速 度,实现对汽车速度的自动控制。 针对车辆动力学控制系统所具有的强非线性特点提出了基于机器视觉的车辆自动驾驶模糊控制方案. 采用车辆系统动力学模型, 通过模糊控制规则的量化划分对车辆在道路上的运动进行了仿真.仿真的结果显示, 本方案可以很好地解决空旷道路上的车辆自动驾驶问题, 并且该控制方法可以保证车辆快速准确地在道路上安全高速行驶, 具有很好的鲁棒性.此外,还可以基于模糊逻辑和滑模控制理论设计一种车辆纵向和横向运动综合控制系统。该控制系统通过对前轮转向角度、发动机节气门开度、制动液压及主动横摆力矩进行协调控制, 使车辆能够以期望速度在理想道路轨迹上行驶, 并提高车辆在行驶过程中的操纵稳定性。 关键字: 车辆自动驾驶机器视觉模糊控制规则模糊逻辑滑膜控制仿真数据采集 引言: 模糊控制是上个世纪诞生的一种基于语义规则的人工智能,是以模糊集合理论为基础的一种新兴控制手段,它是模糊集合理论和模糊技术与自动控制技术相结合的产物。随着时代的发展,科技的创新,模糊理论在控制领域取得了广泛的应用。自动驾驶便是其中一个重要的应用对象。 汽车是现代的主要交通工具,自动驾驶系统是交通体系中最重要的部分之一,一方面它可以推动在机器人自主导航方面的研究进程,在航天和水下机器人的应用中起到重要的作用;另一方面这种技术在未来的智能交通系统中的运用既可以避免驾驶员因判断和交通失误而引起的交通事故,提高交通系统效率,又可以最终实现无人驾驶。汽车自动驾驶是一个比较复杂的问题,难以建立精确的数