习题八
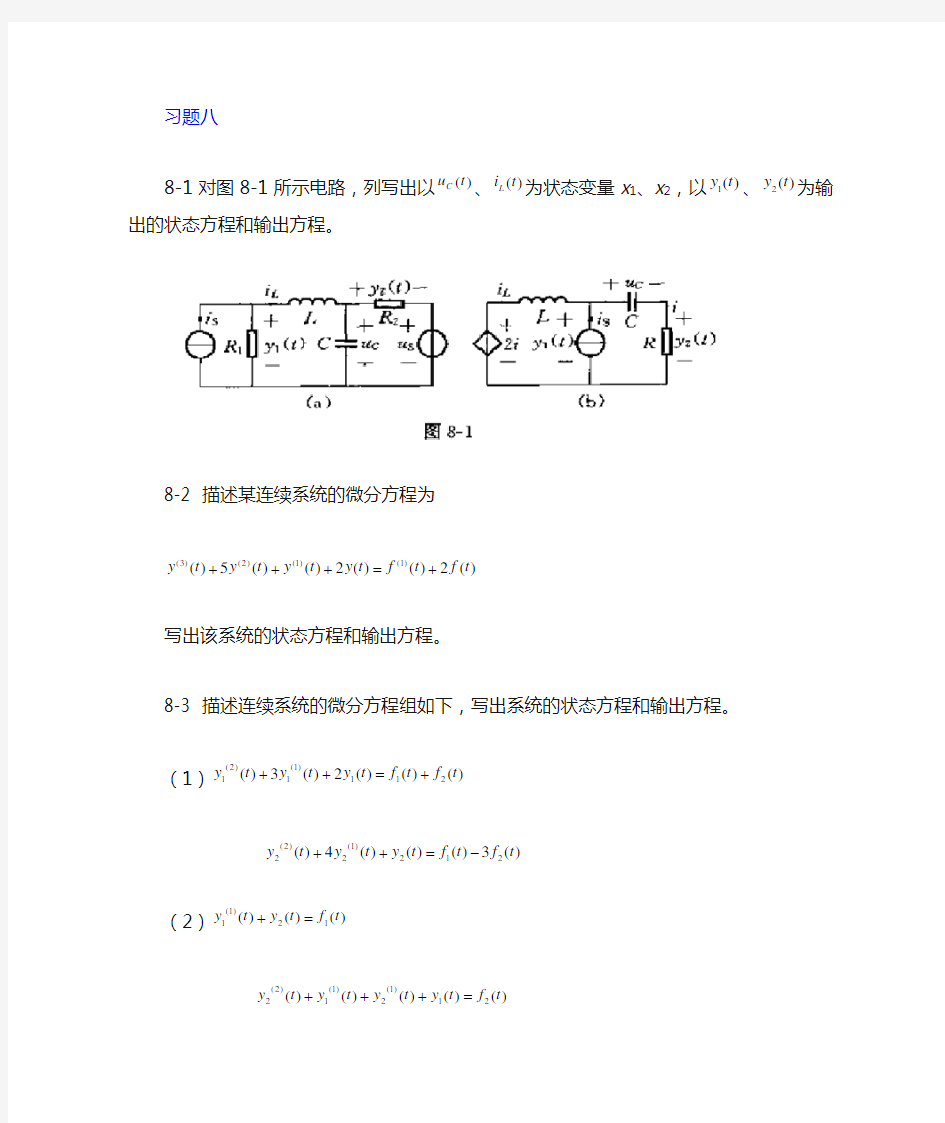
8-1对图8-1所示电路,列写出以)(t u C 、)(t i L 为状态变量x 1、x 2,以)(1t y 、)(2t y 为输出的状态方程和输出方程。
8-2 描述某连续系统的微分方程为
)(2)()(2)()(5)()1()1()2()3(t f t f t y t y t y t y +=+++
写出该系统的状态方程和输出方程。
8-3 描述连续系统的微分方程组如下,写出系统的状态方程和输出方程。 (1))()()(2)(3)(211)
1(1)2(1t f t f t y t y t y +=++
)(3)()()(4)(212)
1(2)2(2t f t f t y t y t y -=++ (2))()()(12)
1(1t f t y t y =+
)()()()()(21)
1(2)
1(1)
2(2t f t y t y t y t y =+++
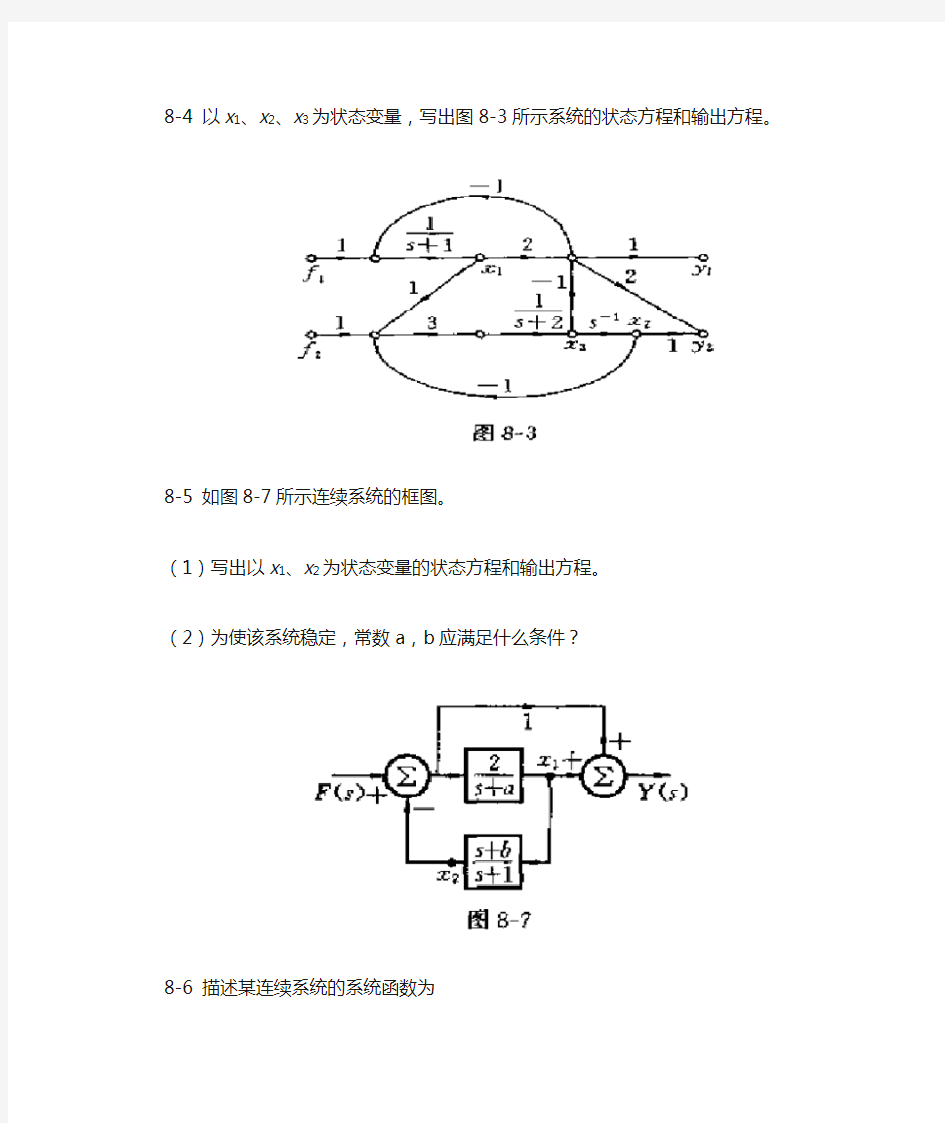
8-4 以x 1、x 2、x 3为状态变量,写出图8-3所示系统的状态方程和输出方程。
8-5 如图8-7所示连续系统的框图。
(1)写出以x 1、x 2为状态变量的状态方程和输出方程。 (2)为使该系统稳定,常数a ,b 应满足什么条件?
8-6 描述某连续系统的系统函数为
12
492)(2
2+++=s s s
s s H 画出其直接形式的信号流图,写出相应的状态方程和输出方程。
8-7 某离散系统的信号流图如图8-13所示。写出以x 1(k )、x 2(k )为状态变量的状态方程和输出方程。
8-8 如图8-14所示离散系统,状态变量x 1、x 2、x 3如图8-14所示。列出系统的状态方程和输出方程。
习题八答案8-1
8-2
8-3
8-4
解: 将系统函数)(s H 改写成
2
11
124192)(---+++=s
s s s H 由此可画出直接形式的信号流图,如图8-10所示。选取图8-10中积分器的输出作为状态变量。由图8-10可写出如下方程 21x x =?
① f x x x +--=?
212412 ②
f x x x x y 224922122++-=+=?
③
将式①和式②写成矩阵形式,得状态方程
将式③写成矩阵形式,得输出方程
8-7
第9章 线性系统的状态空间分析与综合 重点与难点 一、基本概念 1.线性系统的状态空间描述 (1)状态空间概念 状态 反映系统运动状况,并可用以确定系统未来行为的信息集合。 状态变量 确定系统状态的一组独立(数目最少)变量,它对于确定系统的运动状态是必需的,也是充分的。 状态向量 以状态变量为元素构成的向量。 状态空间 以状态变量为坐标所张成的空间。系统某时刻的状态可用状态空间上的点来表示。 状态方程 状态变量的一阶导数与状态变量、输入变量之间的数学关系,一般是关于系统的一阶微分(或差分)方程组。 输出方程 输出变量与状态变量、输入变量之间的数学关系。 状态方程与输出方程合称为状态空间描述或状态空间表达式。线性定常系统状态空间表达式一般用矩阵形式表示: ???+=+=Du Cx y Bu Ax x & (9.1) (2)状态空间表达式的建立。系统状态空间表达式可以由系统微分方程、结构图、传递函数等其他形式的数学模型导出。 (3)状态空间表达式的线性变换及规范化。描述某一系统的状态变量个数(维数)是确定的,但状态变量的选择并不唯一。某一状态向量经任意满秩线性变换后,仍可作为状态向量来描述系统。状态变量选择不同,状态空间表达式形式也不一样。利用线性变换的目的在于使系统矩阵A 规范化,以便于揭示系统特性,利于分析计算。满秩线性变换不改变系统的固有特性。 根据矩阵A 的特征根及相应的独立特征向量情况,可将矩阵A 化为三种规范形式:对角形、约当形和模式矩阵。 (4)线性定常系统状态方程解。状态转移矩阵)(t φ(即矩阵指数At e )及其性质:
i . I =)0(φ ii .A t t A t )()()(φφφ ==& iii. )()()()()(122121t t t t t t φφφφφ±=±=+ iv. )()(1 t t -=-φφ v. )()]([kt t k φφ= vi. )( ])exp[()exp()exp(BA AB t B A Bt At =+= vii. )( )ex p()ex p(11非奇异P P At P APt P --= 求状态转移矩阵)(t φ的常用方法: 拉氏变换法 =)(t φL -1])[(1--A sI (9.2) 级数展开法 ΛΛ++++ +=k k At t A k t A At I e ! 12122 (9.3) 齐次状态方程求解 )0()()(x t t x φ= (9.4) 非齐次状态方程式(9.1)求解 ?-+=t Bu t x t t x 0d )()()0()()(τττφφ (9.5) (5)传递函数矩阵及其实现 传递函数矩阵)(s G :输出向量拉氏变换式与输入向量拉氏变换式之间的传递关系 D B A sI C s G +-=-1)()( (9.6) 传递函数矩阵的实现:已知传递函数矩阵)(s G ,找一个系统},,,{D C B A 使式(9.6)成立,则将系统},,,{D C B A 称为)(s G 的一个实现。当系统阶数等于传递函数矩阵阶数时,称该系统为)(s G 的最小实现。 传递函数矩阵的实现并不唯一。实现的常用标准形式有可控标准形实现、可观测标准形实现、对角形实现和约当形实现等。 (6)线性定常连续系统的离散化及其求解 对式(9.1)表示的线性定常数连续系统进行离散化,导出的系统离散状态空间描述
第九章系统的状态变量分析 1、内容简介 在系统的状态变量分析中,介绍了状态和状态变量的基本概念,由电路原理图建立状态方程的方法,由微分方程建立状态方程的方法,由系统模拟框图建立状态方程的方法,状态方程的时域和变换域求解,状态矢量的线性变换,系统的可控制性和可观测性的基本概念,离散系统的状态方程的建立和求解。最后介绍了用MATLAB求解系统的状态方程。 2、学习目标 1、理解系统的状态与状态空间的概念。 2、掌握连续系统由电路、微分方程、系统模拟框图和系统函数建立状态方程。 3、掌握离散系统由差分方程、系统模拟框图和系统函数建立状态方程。 4、了解状态方程求解的基本方法,能够用MATLAB求解系统的状态方程。 3、重点难点 1.系统状态和状态空间的概念。 2.如何建立系统的状态方程。 4、应用 利用MATLAB求解系统状态方程。
5、教案内容 (1) 系统的状态变量的概念 状态变量 系统在时刻0t 的状态是指一组数10()x t ,20()x t ,…, 0()n x t ,不仅要求这组数的个数是最少的,而且还可由10()x t ,20()x t ,…, 0()n x t 和0t t >时系统的输入得出0t t >时所有的状态或输出。这组变量10()x t ,20()x t ,…, 0()n x t 称为系统的状态变量。 状态空间分析法 状态空间分析法不仅适用与单输入单输出系统,而且适用于多输入多输出系统的分析,它可以描述系统的外部特性,也可以描述系统的内部特性,而且能够推广到时变系统和非线性系统。 (2)系统状态方程的一般形式 m 个输入p 个输出的N 阶连续时间系统的状态方程为N 个一阶微分方程组,可以用矩阵形式表示为 即 离散时间系统的状态方程具有与连续系统状态方程相似的形式,对于一个有m 个输入p 个输出的N 阶离散时间系统可以用N 个一阶差分方程描述,其状态方程和输出方程的一般形式为 其中A ,B ,C ,D 为状态方程和输出方程的系数矩阵。
动态电力系统分析复习题 1. 理想电机 (P1) 满足以下假定条件的电机称为理想电机: (1)电机磁铁部分的磁导率为常数,既忽略调磁滞、磁饱和的影响,也不计涡流及集肤作用等的影响。 (2)对纵轴及横轴而言,电机转子在结构上是完全对称的。 (3)定子的3个绕组的位置在空间互相相差120°电角度。3个绕组在结构上完全相同。同时,它们均在气隙中产生正弦形分步的磁动势。 (4)定子及转子的槽及通风沟等不影响电机定子及转子的电感,即认为电机的定子及转子具有光滑的表面。 2. 在同步发电机模型中,一般考虑哪些阻尼绕组? (P2) 在d 轴上的一个等值阻尼绕组D ; 在q 轴上的一个等值阻尼绕组Q 。 3. 列写出发电机abc 和dq0坐标下的电压平衡方程式。 (P3)、(P15) abc 坐标轴下: ??? ??-ψ=-ψ=-ψ=c a c c b a b b a a a a i r p u i r p u i r p u f f f f D D D D Q Q Q Q u p r i u p r i u p + r i ?=ψ+? =ψ+??=ψ? 合并成 ri p u +ψ= 式中 dt d p = ()T Q D f c b a u u u u u u ,,,,,u = ()T Q D f c b a ψψψψψψ=ψ,,,,, ()Q D f c b a r r r r r r diag ,,,,,r = ()T Q D f c b a i i i i i i ,,,,,i ---= dq0坐标轴下: ??????-??????+????? ?+??????ψψ=??????fDQ dq fDQ dq i i r r 0S p u u 00dq0fDQ dq0fDQ dq0 式中 ()T d q 00S ,,ψψ-=ωωdq 4. 在同步发电机方程中,采用PARK 变换的目的是什么? (P9) 派克变换可以使我们通过等值变换,立足于d 和q 旋转坐标观察电机的电磁现象,从而能极好地适应转子的旋转以及凸极效应。经派克变换后所得的dq0坐标下的同步电机基本方程中的电感参数均为定常值,大大地有助于分析电机暂态过程的机理及有利于实用计算,从而在电机过渡过程分析及大规模电力系统动态分析中取得了广泛的应用。 5. PARK 变换及逆变换公式 (P12) 完整的经典派克变换: ? ???? ??????????? ???? ???? ---=???? ??????c b a c b a c b a q d f f f f f f 212 121sin sin sin cos cos cos 320θθθ θθθ 或记作 abc dq0Df f = 完整的经典派克变换的逆变换: ???? ? ???????????? ???---=??????????0b 1sin cos 1sin cos 1sin cos f f f f f f q d c c b a a c b a θθθθ θθ 或记作 dq0-1 abc f D f = 6. 列写出发电机abc 和dq0坐标下的功率方程式。 (P7)、(P18)
习题八 8-1对图8-1所示电路,列写出以)(t u C 、)(t i L 为状态变量x 1、x 2,以)(1t y 、)(2t y 为输出的状态方程和输出方程。 8-2 描述某连续系统的微分方程为 )(2)()(2)()(5)()1()1()2()3(t f t f t y t y t y t y +=+++ 写出该系统的状态方程和输出方程。 8-3 描述连续系统的微分方程组如下,写出系统的状态方程和输出方程。 (1))()()(2)(3)(211) 1(1)2(1t f t f t y t y t y +=++ )(3)()()(4)(212) 1(2)2(2t f t f t y t y t y -=++ (2))()()(12) 1(1t f t y t y =+ )()()()()(21) 1(2) 1(1) 2(2t f t y t y t y t y =+++ 8-4 以x 1、x 2、x 3为状态变量,写出图8-3所示系统的状态方程和输出方程。 8-5 如图8-7所示连续系统的框图。
(1)写出以x 1、x 2为状态变量的状态方程和输出方程。 (2)为使该系统稳定,常数a ,b 应满足什么条件? 8-6 描述某连续系统的系统函数为 12 492)(2 2+++=s s s s s H 画出其直接形式的信号流图,写出相应的状态方程和输出方程。 8-7 某离散系统的信号流图如图8-13所示。写出以x 1(k )、x 2(k )为状态变量的状态方程和输出方程。 8-8 如图8-14所示离散系统,状态变量x 1、x 2、x 3如图8-14所示。列出系统的状态方程和输出方程。
第八章电机的状态变量分析法 本世纪二十年代以来,研究连续信号作用于线性网络问题的最有力工具是拉氏变换,其特点是将研究对象的特性用传递函数表示,然后根据激励函数求出响应函数。这种方法称为输入词输出法,又称端部法,因为它只研究网络的端口特性,而不考虑网络内部的结构、参数、电压、电流等。六十年代以来,随着电子计算机的广泛应用,状态变量分析法有了很大的发展。与输入—输出法相比,这种方法是一种内部法,因为它首先选定能够代表网络(或物理系统)内部特性的某些物理量,作为状态变量,建立相应的状态方程求解,然后由解出的状态变量和给定的输入量求出所需的输出量。 机电系统(包括电机)可化成电网络求解。使用状态变量法来分析机电系统的动态性能有以下优点: (1)状态变量方程是一组联立的一阶微分方程,可不必经过拉氏变换而直接在时域内求解,用电子计算机解这类方程组早已规格化,用起来很方便。 (2)不仅适用于单输入、单输出的问题,也适用于多输入、多输出的问题,后者用输入呻输出法较难求解。 (3)对于较复杂的网络,包括一部分线性、参数不随时间变化的网络和大部分非线性、时变参数的网络,数值计算法常是唯一可采用的方法。在用电子计算机进行这种计算时,用状态变量法要比用拉氏变换法容易。 (4)由于状态变量法是一种内部法,用于分析系统的稳定性、可控度等是很方便的,可以在不求出变量的解的情况下进行。由于上述优点,用状态变量法分析电机的动态性能,不仅有可能建立较精确的数学模型,使计算结果接近于实测值;而且可以解决某些过去难以分析的动态课题,从而使电机理论得到进一步发展。 本章首先简要介绍状态变量和状态方程的基本概念,然后建立几种典型的电机的状态方程,最后概略介绍它们的求解方法,并附有计算实例。 8—1状态变量分析法的基本概念 一、状态变量和状态方程的基本概念 由电路理论可知电容和电感是储能元件,它在某一瞬时的输出量不仅决定于该瞬时的输入,而是要由输入的全部历史来决定。例如电容器的电荷(输出量)与电流(输入量)的关系是
第八章 控制系统的状态空间分析 一、状态空间的基本概念 1. 状态 反应系统运行状况,并可用一个确定系统未来行为的信息集合。 2. 状态变量 确定系统状态的一组独立(数目最少的)变量,如果给定了0t t =时刻 这组变量的值())()() (00201t x t x t x n Λ 和0t t ≥时输入的时间函数)(t u ,则系 统在0t t ≥任何时刻())()() (21t x t x t x n Λ 的行为就可完全确定。 3. 状态向量 以状态变量为元素构成的向量,即[])()()()(21t x t x t x t x n Λ =。 4. 状态空间 以状态变量())()() (21t x t x t x n Λ 为坐标的n 维空间。系统在某时 刻的状态,可用状态空间上的点来表示。 5. 状态方程 描述状态变量,输入变量之间关系的一阶微分方程组。 6. 输出方程 描述输出变量与状态变量、输入变量间函数关系的代数方程。 二、状态空间描述(状态空间表达式) 1. 状态方程与输出方程合起来称为状态空间描述或状态空间表达式,线性定常系统状 态空间描述一般用矩阵形式表示,对于线性定常连续系统有 ? ? ?+=+=)()()()()()(t Du t Cx t y t Bu t Ax t x & (8-1) 对于线性定常离散系统有 ?? ?+=+=+) ()()() ()()1(k Du k Cx k y k Hu k Gx k x (8-2) 2. 状态空间描述的建立:系统的状态空间描述可以由系统的微分方程,结构图(方框 图),状态变量图、传递函数或脉冲传递函数(Z 传递函数)等其它形式的数学模型导出。 3. 状态空间描述的线性变换及规范化(标准型) 系统状态变量的选择不是唯一的,状态变量选择不同,状态空间描述也不一样。利用线性变换可将系统的矩阵A (见式8-1)规范化为四种标准型:能控标准型、能观标准型、对角标准型、约当标准型。
第2章 “控制系统的状态空间描述”习题解答 系统的结构如图所示。以图中所标记的1x 、2x 、3x 作为状态变量,推导其状态空间表达式。其中,u 、y 分别为系统的输入、输出,1α、2α、3α均为标量。 3 x 2 x 图系统结构图 解 图给出了由积分器、放大器及加法器所描述的系统结构图,且图中每个积分器的输出即为状态变量,这种图形称为系统状态变量图。状态变量图即描述了系统状态变量之间的关系,又说明了状态变量的物理意义。由状态变量图可直接求得系统的状态空间表达式。 着眼于求和点①、②、③,则有 ①:2111x x x +=α& ②: 3222x x x +=α&③:u x x +=333α& 输出y 为1y x du =+,得 1112223331000100 1x a x x a x u x a x ?? ?????? ????????=+???????????????????????? &&& []123100x y x du x ?? ??=+?? ???? 已知系统的微分方程 (1) u y y y y 354=+++&&&&&& ;(2) u u y y -=+&&&&&&32; (3) u u y y y y 75532+=+++&&&&&&&&& 。试列写出它们的状态空间表达式。 (1) 解 选择状态变量1y x =,2y x =&,3y x =&&,则有:
1223 31231 543x x x x x x x x u y x =??=?? =---+??=?&&& 状态空间表达式为:[]112233123010000105413100x x x x u x x x y x x ????????????????=+????????????????---???????? ????=?????? &&& (2) 解 采用拉氏变换法求取状态空间表达式。对微分方程(2)在零初试条件 下取拉氏变换得: 3222332()3()()() 11()12 23()232 s Y s sY s s U s U s s Y s s U s s s s s +=---==++ 由公式、可直接求得系统状态空间表达式为 1122330100001031002x x x x u x x ?? ????????????????=+? ?????????????????????-?? ?? &&& 123110 2 2x y x x ?????? =- ?????????? (3) 解 采用拉氏变换法求取状态空间表达式。对微分方程(3)在零初试条件 下取拉氏变换得: 323()2()3()5()5()7()s Y s s Y s sY s Y s s U s U s +++=+
动态电力系统分析复习题 1. 理想电机 (P1) 满足以下假定条件的电机称为理想电机: (1)电机磁铁部分的磁导率为常数,既忽略调磁滞、磁饱和的影响,也不计涡流及集肤作用等的影响。 (2)对纵轴及横轴而言,电机转子在结构上是完全对称的。 (3)定子的3个绕组的位置在空间互相相差120°电角度。3个绕组在结构上完全相同。同时,它们均在气隙中产生正弦形分步的磁动势。 (4)定子及转子的槽及通风沟等不影响电机定子及转子的电感,即认为电机的定子及转子具有光滑的表面。 2. 在同步发电机模型中,一般考虑哪些阻尼绕组 (P2) ; 在d 轴上的一个等值阻尼绕组D ; 在q 轴上的一个等值阻尼绕组Q 。 3. 列写出发电机abc 和dq0坐标下的电压平衡方程式。 (P3)、(P15) abc 坐标轴下: ??? ??-ψ=-ψ=-ψ=c a c c b a b b a a a a i r p u i r p u i r p u f f f f D D D D Q Q Q Q u p r i u p r i u p + r i ?=ψ+? =ψ+??=ψ? 合并成 ri p u +ψ= 式中 dt d p = ()T Q D f c b a u u u u u u ,,,,,u = ()T Q D f c b a ψψψψψψ=ψ,,,,, ()Q D f c b a r r r r r r diag ,,,,,r = () T Q D f c b a i i i i i i ,,,,,i ---= # dq0坐标轴下: ??????-????? ?+??????+??????ψψ=??????fDQ dq fDQ dq i i r r 0S p u u 00dq0fDQ dq0fDQ dq0 式中 ()T d q 00S ,,ψψ-=ωωdq 4. 在同步发电机方程中,采用PARK 变换的目的是什么 (P9) 派克变换可以使我们通过等值变换,立足于d 和q 旋转坐标观察电机的电磁现象,从而能极好地适应转子的旋转以及凸极效应。经派克变换后所得的dq0坐标下的同步电机基本方程中的电感参数均为定常值,大大地有助于分析电机暂态过程的机理及有利于实用计算,从而在电机过渡过程分析及大规模电力系统动态分析中取得了广泛的应用。 5. PARK 变换及逆变换公式 (P12) 完整的经典派克变换: ? ???? ??????????? ???? ??? ? ---=???? ??????c b a c b a c b a q d f f f f f f 212 121sin sin sin cos cos cos 320θθθ θθθ 或记作 abc dq0Df f = / 完整的经典派克变换的逆变换:
摘要:本文以三相感应电动机为模型,对其在从静止开始起动的动态过程进行了分析,利用Matlab 软件进行了仿真。 Abstract :In this paper,three-phase induction motor for the modelfrom its start-up of static started the process of dynamic analysis, the use of Matlab simulation software. 关键词: 三相感应电动机; 起动过程 Key words: Three-phase induction motor; Start-up process 一 引言 Matlab 语言是Mathworks 公司开发的数值分析功能软件,其在控制系统仿真上的应用已越来越广泛。它提供的计算机辅助设计能很容易地解决系统仿真、分析、研究的问题,关键在于仿真模型的构造,模型的准确与否将直接影响仿真结果的可靠性。 对于三相感应电动机,列出在相坐标系中的运动方程,然后把转子量变换到 定子边,得到定子坐标系中感应电动机的运动方程,即感应电机的运动方程为: 0e L d dt d T T R J dt d p dt θθθ ?Ω?? =++??? Ω? =+Ω+?? ?=Ω?? i L u Ri L i (1) 其中u 、i 和R 、L 分别为整个电机地电压列阵、电流列阵和电阻矩阵、电感矩阵。θ为电角度,Ω为机械角速度,二者均为状态变量,绕阻上地外加电压u 和轴上的负载转矩L T 为控制变量。利用此模型对三相感应电动机的静止开始的启动过程进行动态分析并利用Matlab 软件仿真启动过程电机运行动态特性曲线。 二 三相感应电动机的动态方程 三相感应电动机的气隙均匀,定子绕组是对称三相绕组A ,B ,C ,转子绕组也是三相对称绕组a ,b ,c 。电角度为θ,机械角速度为Ω,逆时针旋转,电机