10.2小波变换的基本原理 地质雷达的电磁波信号和地震波信号都是非平稳随机时变信号,长期以来,因非平稳信号处理的理论不健全,只好将其作为平稳信号来处理,其处理结果当然不满意。近年来,随着科学技术的发展和进步,国内外学术界已将注意力转向非平稳随机信号分析与处理的研究上,其中非平稳随机信号的时频表示法是研究热点之一。在这一研究中,戈勃展开、小波变换、维格纳分布与广义双线性时频分布等理论发展起来,这些方法既可以处理平稳信号过程,也可以处理非平稳随机时变信号。 小波变换是上世纪80年代中后期逐渐发展起来的一种数学分析方法。1984年法国科学家J.M OLET在分析地震波的局部特性时首先使用了小波这一术语,并用小波变换对地震信号进行处理。小波术语的含义是指一组衰减震动的波形,其振幅正负相间变化,平均值为零,是具有一定的带宽和中心频率波组。小波变换是用伸缩和平移小波形成的小波基来分解(变换)或重构(反变换)时变信号的过程。不同的小波具有不同带宽和中心频率,同一小波集中的带宽与中心频率的比是不变的,小波变换是一系列的带通滤波响应。它的数学过程与傅立叶分析是相似的,只是在傅立叶分析中的基函数是单频的调和函数,而小波分析中的基函数是小波,是一可变带宽内调和函数的组合。 小波变换在时域和频域都具有很好的局部化性质,较好地解决了时域和频域分辨率的矛盾,对于信号的低频成分采用宽时窗,对高频成分采用窄时窗。因而,小波分析特别适合处理非平稳时变信号,在语音分析和图象处理中有广泛的应用,在地震、雷达资料处理中将有良好的应用前景。 下边就小波分析的基本原理、主要作用及在雷达资料处理中的应用三方面作以介绍。 10.2.1小波分析的基本原理 小波函数的数学表达
我希望能简单介绍一下小波变换,它和傅立叶变换的比较,以及它在移动平台做motion detection的应用。如果不做特殊说明,均以离散小波为例子。考虑到我以前看中文资料的痛苦程度,我会尽量用简单,但是直观的方式去介绍。有些必要的公式是不能少的,但我尽量少用公式,多用图。另外,我不是一个好的翻译者,所以对于某些实在翻译不清楚的术语,我就会直接用英语。我并不claim我会把整个小波变换讲清楚,这是不可能的事,我只能尽力去围绕要点展开,比如小波变换相对傅立叶变换的好处,这些好处的原因是什么,小波变换的几个根本性质是什么,背后的推导是什么。我希望达到的目的就是一个小波变换的初学者在看完这个系列之后,就能用matlab或者别的工具对信号做小波变换的基本分析并且知道这个分析大概是怎么回事。 要讲小波变换,我们必须了解傅立叶变换。要了解傅立叶变换,我们先要弄清楚什么是”变换“。很多处理,不管是压缩也好,滤波也好,图形处理也好,本质都是变换。变换的是什么东西呢?是基,也就是basis。如果你暂时有些遗忘了basis的定义,那么简单说,在线性代数里,basis是指空间里一系列线性独立的向量,而这个空间里的任何其他向量,都可以由这些个向量的线性组合来表示。那basis在变换里面啥用呢?比如说吧,傅立叶展开的本质,就是把一个空间中的信号用该空间的某个basis的线性组合表示出来,要这样表示的原因,是因为傅立叶变换的本质,是。小波变换自然也不例外的和basis有关了。再比如你用Photoshop去处理图像,里面的图像拉伸,反转,等等一系列操作,都是和basis的改变有关。 既然这些变换都是在搞基,那我们自然就容易想到,这个basis的选取非常重要,因为basis的特点决定了具体的计算过程。一个空间中可能有很多种形式的basis,什么样的basis比较好,很大程度上取决于这个basis服务于什么应用。比如如果我们希望选取有利于压缩的话,那么就希望这个basis能用其中很少的向量来最大程度地表示信号,这样即使把别的向量给砍了,信号也不会损失很多。而如果是图形处理中常见的线性变换,最省计算量的完美basis就是eigenvector basis了,因为此时变换矩阵T对它们的作用等同于对角矩阵( Tv_n = av_n,a是eigenvalue )。总的来说,抛开具体的应用不谈,所有的basis,我们都希望它们有一个共同的特点,那就是,容易计算,用最简单的方式呈现最多的信号特性。 好,现在我们对变换有了基本的认识,知道他们其实就是在搞基。当然,搞基也是分形式的,不同的变换,搞基的妙处各有不同。接下来先看看,傅立叶变换是在干嘛。 傅立叶级数最早是Joseph Fourier 这个人提出的,他发现,这个basis不仅仅存在与vector space,还存在于funct ion space。这个function space本质上还是一个linear vector space,可以是有限的,可以是无限的,只不过在这个空间里,vector就是function了,而对应的标量就是实数或者复数。在vector space里,你有vector v可以写成vector basis的线性组合,那在function space里,function f(x)也可以写成对应function basis的线性组合,也有norm。你的vector basis可以是正交的,我的function basis也可以是正交的(比如sin(t)和sin(2t))。唯一不同的是,我的function basis是无穷尽的,因为我的function space的维度是无穷的。好,具体来说,那就是现在我们有一个函数,f(x)。我们希望将它写成一些cos函数和一些sin函数的形式,像这样 again,这是一个无限循环的函数。其中的1,cosx, sinx, cos2x …..这些,就是傅立叶级数。傅立叶级数应用如此广泛的主要原因之一,就是它们这帮子function basis是正交的,这就是有趣的地方了。为什么function basis正交如此重要呢?我们说两个vector正交,那就是他俩的内积为0。那对于function basis呢?function basis怎么求内积呢? 现在先复习一下vector正交的定义。我们说两个vector v,w如果正交的话,应符合:
现代数字信号处理作业 小波分析及其应用 电研111 梁帅
小波分析及其应用 1.小波分析的概念和特点 1.1小波理论的发展概况 20世纪80年代逐渐发展和兴起的小波分析(wavelctanalysis)是20世纪数学领域中研究的重要杰出成果之一。小波分析理论作为数学界中一种比较成熟的理论基础,应用到了各种领域的研究当中,推动了小波分析在各工程应用中的发展。它作为一种新的现代数字信号处理算法,汲取了现代分析学中诸如样条分析、傅立叶分析、数值分析和泛函分析等众数学多分支的精华部分,替代了工程界中一直应用的傅立叶变换,它是一种纯频域分析方法,不能在时频同时具有局部化特性。而小波分析中的多尺度分析思想,犹如一台变焦照相机,可以由粗及精逐步观察信号,在局部时频分析中具有很强的灵活性,因此有“数学显微镜”的美称。它能自动随着频率增加而调节成窄的“时窗”和宽的“频窗”,又随着频率降低而调节成宽的“时窗”和窄的“频窗”以适应实际分析需要。另外,小波变换在经过适当离散后可以够成标准正交基或正交系,这些在理论和应用上都具有十分重要的意义,因此,小波分析在各个领域得到了高度的重视并取得了许多重要的成果。 小波变换作为一种数学理论和现代数字信号处埋方法在科学技术界引起了越来越多专家学者的关注和重视。在数学家看来,基于小波变换的小波分析技术是当今数值分析、泛函分析、调和分析等半个多世纪以来发展最完美的结晶,是正在发展中的新的数学分支。在工程领域,特别是在信号处理、图像处理、机器视觉、模糊识别、语音识别、流体力学、量子物理、地震勘测、电磁学、CT成像、机械故障诊断与监控等领域,它被认为是近年来在工具及方法上的重大突破。然而,小波分析虽然在众多领域中已经取得了一定的成果,但是,有专家预言小波分析理论的真正高潮并没有到来。首先,小波分析尚需进一步完善,除一维小波分析理论比较成熟以外,向量小波和多维小波则需要进行更加深入的研究与讨论;其次,针对不同情况选择不同的小波基函数,实现的效果是有差别性的这一问题,对最优小波基函数的选取方法有待进一步研究。在今后数年中,小波理论将成为科技工作者经常使用的又一锐利数学工具,极大地促进科技进步及各个领域工程应用的新发展。 小波分析的概念最早是在1974年由法国地质物理学家J.Morlet提出的,并通过物理直观和信号处理的实际经验建立了反演公示,但当时该理论未能得到数学家的认可。1986年法国数学家YMcyer偶尔构造出一个真正的小波基,并与
有源滤波器Active Filter(信号分离电路) 测量系统从传感器拾取的信号往往包含噪声和许多与被测量无关的信号,并且原始的测量信号经传输、放大、变换、运算及各种其它处理过程,也会混入各种不同形式的噪声,从面影响测量精度。 这些噪声一般随机性很强,很难从时域中直接分离,但限于其产生的机理,其噪声功率是有限的,并按一定规律分布于频率域中某一特定频带中。 滤波器(信号分离电路):从频域中实现对噪声的抑制,提取所需要的信号,是各种测控系统中必不可少的组成部分。 对滤波器的要求:(1)滤波特性好;(2)级联特性好(输入,输出); (3)滤波频率便于改变 滤波器举例: 心电信号的滤波:主要受到50Hz的工频干扰,采用50Hz陷波(带阻)滤波器。
一.滤波器的基本知识 ⒈按处理信号的形式分类:模拟:连续的模拟信号 (又分为:无源和有源) 数字:离散的数字信号。 ⒉理想滤波器对不同频率的作用: 通带内,使信号受到很小的衰减而通过。阻带内,使信号受到很大的衰减而抑制,无过渡带。
⒊按频谱结构分为5种类型: 滤波器对信号不予衰减或以很小衰减让其通过的频段称为通带;对信号的衰减超过某一规定值的频段称为阻带;位于通带和阻带之间的频段称为过渡带。根据通带和阻带所处范围的不同,滤波器功能可分为以下几种: 低通(Low Pass Filter) 高通(High Pass Filter) 带通(Band Pass Filter) 带阻(Band Elimination Filter) 全通(All Pass Filter)(理想)各种频率信号都
能通过,但不同的频率信号的相位有不同的变化, 一种移相器。 图2-2 按频谱结构分类的各种滤波器的衰减(1-幅频)特性 几个定义: (1)通带的边界频率:一般来讲指下降—3dB即对应的频率。 (2)阻带的边界频率:由设计时,指定。 (3)中心频率:对于带通或带阻而言,用f0或ω0表示。 (4)通带宽度:用Δf0或Δω0表示。 (5)品质因数:衡量带通或带阻滤波器的选频特性。定义为: Q=f0/Δf0或ω0/Δω0,Q值越高,选频性能越好。
小波变换的原理及m a t l a b仿真程序
基于小波变换的信号降噪研究 2 小波分析基本理论 设Ψ(t)∈L 2( R) ( L 2( R) 表示平方可积的实数空间,即能量有限的信号空间) , 其傅立叶变换为Ψ(t)。当Ψ(t)满足条件[4,7]: 2 () R t dw w C ψψ =<∞? (1) 时,我们称Ψ(t)为一个基本小波或母小波,将母小波函数Ψ(t)经伸缩和平移后,就可以得到一个小波序列: ,()( )a b t b t a ψ -= ,,0a b R a ∈≠ (2) 其中a 为伸缩因子,b 为平移因子。 对于任意的函数f(t)∈L 2( R)的连续小波变换为: ,(,),()( )f a b R t b W a b f f t dt a ψψ-=<>= ? (3) 其逆变换为: 211()(,)()f R R t b f t W a b dadb C a a ψ ψ+-= ?? (4) 小波变换的时频窗是可以由伸缩因子a 和平移因子b 来调节的,平移因子b,可以改变窗口在相平面时间轴上的位置,而伸缩因子b 的大小不仅能影响窗口在频率轴上的位置,还能改变窗口的形状。小波变换对不同的频率在时域上的取样步长是可调节的,在低频时,小波变换的时间分辨率较低,频率分辨率较高:在高频时,小波变换的时间分辨率较高,而频率分辨率较低。使用小波变换处理信号时,首先选取适当的小波函数对信号进行分解,其次对分解出的参
数进行阈值处理,选取合适的阈值进行分析,最后利用处理后的参数进行逆小波变换,对信号进行重构。 3 小波降噪的原理和方法 3.1 小波降噪原理 从信号学的角度看 ,小波去噪是一个信号滤波的问题。尽管在很大程度上小波去噪可以看成是低通滤波 ,但由于在去噪后 ,还能成功地保留信号特征 ,所以在这一点上又优于传统的低通滤波器。由此可见 ,小波去噪实际上是特征提取和低通滤波的综合 ,其流程框图如图所示[6]: 小波分析的重要应用之一就是用于信号消噪 ,一个含噪的一维信号模型可表示为如下形式: (k)()()S f k e k ε=+* k=0.1…….n-1 其中 ,f( k)为有用信号,s(k)为含噪声信号,e(k)为噪声,ε为噪声系数的标准偏差。 假设e(k)为高斯白噪声,通常情况下有用信号表现为低频部分或是一些比较平稳的信号,而噪声信号则表现为高频的信号,下面对 s(k)信号进行如图结构的小波分解,则噪声部分通常包含在Cd1、Cd2、Cd3中,只要对 Cd1,Cd2,Cd3作相应的小波系数处理,然后对信号进行重构即可以达到消噪的目的。
术语定义 1. 额定电压 EMI滤波器用在指定电源频率的工作电压(中国:250V, 50Hz,欧洲:230V, 50Hz;美国:115V, 60Hz) 2. 额定电流 在额定电压和指定温度条件下(常为环境温度40C), EMI滤波器所允许的最大连续工作电流(Imax)。在其他环境温度下的最大允许工作电流是环境温度的函数,可用如下公式得出: 3. 试验电压 在EMI滤波器的指定端子之间和规定时间内施加的电压。试验电压分为两种,一种是加载在电源(或负载)端子之间,称为线-线试验电压;另一种是加载在电源(或负载)任一端与接地端(或滤波器金属外壳)之间,称为线-地试验电压。4. 泄漏电流 EMI滤波器加载额定电压后,断开滤波器的接地端与电源安全地线的条件下,测得接地端到电源(或负载)任一端间的电流,该值直接与接地电容的容量有关,可由如下公式得出: 其中 F为工作频率, C为接地电容的容量, V为线-地电压 5. 插入损耗 是衡量滤波器效果的指标。指的是在一定条件下,EMI滤波器对干扰信号的衰减能力。它用滤波器插入前信号源直接传送给负载的功率和插入后传送给负载的功率的对数来描述。在50Q系统内测试时,可用下式来表示: IL=20Lg(E0/E1) 其中,IL- 插入损耗(单位:dB) EO-负载直接接到信号源上的电压 E1-插入滤波器后负载上的电压
6. 气候等级指EMI滤波器的工作环境等级,按IEC规定应按以下方式标注: XX/XXX/XX 前 2 位数字代表滤波器的最低工作温度中间数字代表滤波器的最高工作温度后 2 位数字代表质量认定时在规定稳态湿热条件下的试验天数 7. 绝缘电阻 绝缘电阻是指滤波器相线,中线对地之间的阻值。通常用专用绝缘电阻表测试。 8. 电磁干扰(EMI) 电磁干扰经常与无线电频率干扰(RFI )交替使用。从技术上来说,EMI指的是能量形式(电磁),然而RFI指的是噪声频率的范围。滤波器用以消除EMI和RFI 中的多余电磁能。 9. 频率范围 电磁能量的频率带宽常用赫兹(Hz,每秒循环次数),千赫(KHz,每秒循环千次数)表示。电源滤波器的典型频率范围在150kHz to 30MHz (超过30MHz即为辐射)10. 阻抗失配 为了达到更好的滤波效果,要使滤波器与它的源阻抗和负载阻抗失配。如图所示。 11. 工作频率 电源滤波器的工作频率标称值为50/60Hz(中国、欧洲等为50Hz;北美为60Hz)。然而,电源滤波器在直流或400Hz的情况下工作,并不会损害其效力。 二、滤波器的作用 1. 什么是射频干扰(RFI)? RFI 是指产生在无线电通讯时,所用频率范围内的一种多余的电磁能。传导现象的频率范围介于10kHz到30MHN间;辐射现象的频率范围介于30MHz到1GHz间。 2. 为何要关注RFI? 之所以必须考虑RFI,基于两点原因:(1)他们的产品必须在其工作环境下正常运行,然而该工作环境常常伴随有严重的R F I。(2)他们的产品不能辐射RFI,以确保不干扰对健康及安全都至关重要的射频(RF)通讯。法律已对可靠的RF 通讯做出了规定,以确保电子设备的RFI 控制。 3. 什么是RFI 的传播模式?
第五章 小波变换基本原理 问题 ①小波变换如何实现时频分析?其频率轴刻度如何标定? —尺度 ②小波发展史 ③小波变换与短时傅里叶变换比较 a .适用领域不同 b.STFT 任意窗函数 WT (要容许性条件) ④小波相关概念,数值实现算法 多分辨率分析(哈尔小波为例) Daubechies 正交小波构造 MRA 的滤波器实现 ⑤小波的历史地位仍不如FT ,并不是万能的 5.1 连续小波变换 一.CWT 与时频分析 1.概念:? +∞ ∞ --ψ= dt a b t t S a b a CWT )( *)(1),( 2.小波变换与STFT 用于时频分析的区别 小波 构造? 1910 Harr 小波 80年代初兴起 Meyer —小波解析形式 80年代末 Mallat 多分辨率分析—WT 无须尺度和小波函数—滤波器组实现 90年代初 Daubechies 正交小波变换 90年代中后期 Sweblews 第二代小波变换
3.WT 与STFT 对比举例(Fig 5–6, Fig 5–7) 二.WT 几个注意的问题 1.WT 与)(t ψ选择有关 — 应用信号分析还是信号复原 2.母小波)(t ψ必须满足容许性条件 ∞<ψ=? ∞ +∞ -ψdw w w C 2 )( ①隐含要求 )(,0)0(t ψ=ψ即具有带通特性 ②利用ψC 可推出反变换表达式 ??+∞∞-+∞ ∞-ψ -ψ= dadb a b t b a CWT a C t S )(),(11 )(2 3.CWT 高度冗余(与CSTFT 相似) 4.二进小波变换(对平移量b 和尺度进行离散化) )2(2)()(1 )(2 ,22,,n t t a b t a t n b a m m n m b a m m -ψ=ψ?-ψ= ??==--ψ dt t t S n CWT d n m m m n m )(*)()2,2(,,?+∞ ∞ ---ψ=?= 5.小波变换具有时移不变性 ) ,()() ,()(00b b a C W T b t S b a C W T t S -?-? 6.用小波重构信号 ∑∑ ∑∑+∞-∞=+∞ -∞ =+∞-∞=+∞ -∞ =ψψ= m n m n n m n m n m n m t d t d t S )(?)(?)(,,,,正交小波 中心问题:如何构建对偶框架{} n m ,?ψ
2011-2012 学年第一学期 2011级硕士研究生考试试卷 课程名称:小波变换理论及应用任课教师:考试时间:分钟 考核类型:A()闭卷考试(80%)+平时成绩(20%); B()闭卷考试(50%)+ 课程论文(50%); C(√)课程论文或课程设计(70%)+平时成绩(30%)。 一、以图示的方式详细说明连续小波变换(CWT)的运算过程,分析小波变换的内涵;并阐述如何从多分辨率(MRA)的角度构造正交小波基。(20分) 二、综述小波变换理论与工程应用方面的研究进展,不少于3000字。(25分) 三、运用MATLAB中的小波函数和小波工具箱,分别对taobao.wav语音信号在加噪之后的taobao_noise.wav信号进行降噪处理,要求列出程序、降噪结果及降噪的理论依据。(25分) 四、平时成绩。(30分)
(一)连续小波变换(CWT )的运算过程及内涵 将平方可积空间中任意函数f (t )在小波基下展开,称这种展开为函数f (t )的连续小波变换(Continue Wavelet Transform ,简记CWT )其表达式为 t a b t t f a b a f W d )(*)(||1),(? ∞+∞--=ψψ ( 1.1) 其中,a ∈R 且a ≠0。式(1.19)定义了连续小波变换,a 为尺度因子,表示与频率相关的伸 缩,b 为时间平移因子。其中)(| |1)(,a b t a t b a -=ψψ为窗口函数也是小波母函数。 从式(1.1)可以得出,连续小波变换计算分以下5个步骤进行。 ① 选定一个小波,并与处在分析时段部分的信号相比较。 ② 计算该时刻的连续小波变换系数C 。如图1.5所示,C 表示了该小波与处在分析时段内的信号波形相似程度。C 愈大,表示两者的波形相似程度愈高。小波变换系数依赖于所选择的小波。因此,为了检测某些特定波形的信号,应该选择波形相近的小波进行分析。 图1.5 计算小波变换系数示意图 ③ 如图1.6所示,调整参数b ,调整信号的分析时间段,向右平移小波,重复①~②步骤,直到分析时段已经覆盖了信号的整个支撑区间。 ④ 调整参数a ,尺度伸缩,重复①~③步骤。 ⑤ 重复①~④步骤,计算完所有的尺度的连续小波变换系数,如图1.7所示。 C =0.2247
第二章自适应滤波器原理 2.1 基本原理 2.1.1 自适应滤波器的发展 在解决线性滤波问题的统计方法中,通常假设已知有用信号及其附加噪声的某些统计参数(例如,均值和自相关函数) ,而且需要设计含噪数据作为其输入的线性滤波器,使得根据某种统计准则噪声对滤波器的影响最小。实现该滤波器优化问题的一个有用方法是使误差信号(定义为期望响应与滤波器实际输出之差)的均方值最小化。对于平稳输入,通常采用所谓维纳滤波器( Wiener filter) 的解决方案。该滤波器在均方误差意义上使最优的。误差信号均方值相对于滤波器可调参数的曲线通常称为误差性能曲面。该曲面的极小点即为维纳解。 维纳滤波器不适合于应对信号和/或噪声非平稳问题。在这种情况下,必须假设最优滤波器为时变形式。对于这个更加困难的问题,十分成功的一个解决方案使采用卡尔曼滤波器 (Kalman filter )。该滤波器在各种工程应用中式一个强有力的系统。 维纳滤波器的设计要求所要处理的数据统计方面的先验知识。只有当输入数据的统计特性与滤波器设计所依赖的某一先验知识匹配时,该滤波器才是最优的。当这个信息完全未知时,就不可能设计维纳滤波器,或者该设计不再是最优的。而且维纳滤波器的参数是固定的。 在这种情况下,可采用的一个直接方法是“估计和插入过程”。该过程包含两个步骤,首先是“估计”有关信号的统计参数,然后将所得到的结果“插入( plug into)”非递归公式以计算滤波器参数。对于实时运算,该过程的缺点是要求特别精心制作,而且要求价格昂贵的硬件。为了消除这个限制,可采用自适应滤波器(adaptive filter)。采用这样一种系统,意味着滤波器是自设计的,即自适应滤波器依靠递归算法进行其计算,这样使它有可能在无法获得有关信号特征完整知识的环境下,玩完满地完成滤波运算。该算法将从某些预先确定的初始条件集出发,这些初始条件代表了人们所知道的上述环境的任何一种情况。我们还发现,在平稳环境下,该运算经一些成功迭代后收敛于某种统计意义上的最优维纳解。在非平稳环境下,该算法提供了一种跟踪能力,即跟踪输入数据统计特性随时间的变化,只要这种变化时足够缓慢的。 40年代,N.维纳用最小均方原则设计最佳线性滤波器,用来处理平稳随机
一、叙述小波分析理论发展的历史和研究现状 答:傅立叶变换能够将信号的时域和特征和频域特征联系起来,能分别从信号的时域和频域观察,但不能把二者有机的结合起来。这是因为信号的时域波形中不包含任何频域信息,而其傅立叶谱是信号的统计特性,从其表达式中也可以看出,它是整个时间域内的积分,没有局部化分析信号的功能,完全不具备时域信息,也就是说,对于傅立叶谱中的某一频率,不能够知道这个频率是在什么时候产生的。这样在信号分析中就面临一对最基本的矛盾——时域和频域的局部化矛盾。 在实际的信号处理过程中,尤其是对非常平稳信号的处理中,信号在任一时刻附近的频域特征很重要。如柴油机缸盖表明的振动信号就是由撞击或冲击产生的,是一瞬变信号,单从时域或频域上来分析是不够的。这就促使人们去寻找一种新方法,能将时域和频域结合起来描述观察信号的时频联合特征,构成信号的时频谱,这就是所谓的时频分析,亦称为时频局部化方法。 为了分析和处理非平稳信号,人们对傅立叶分析进行了推广乃至根本性的革命,提出并开发了一系列新的信号分析理论:短时傅立叶变换、时频分析、Gabor 变换、小波变换Randon-Wigner变换、分数阶傅立叶变换、线形调频小波变换、循环统计量理论和调幅—调频信号分析等。其中,短时傅立叶变换和小波变换也是因传统的傅立叶变换不能够满足信号处理的要求而产生的。 短时傅立叶变换分析的基本思想是:假定非平稳信号在不同的有限时间宽度内是平稳信号,从而计算出各个不同时刻的功率谱。但从本质上讲,短时傅立叶变换是一种单一分辨率的信号分析方法,因为它使用一个固定的短时窗函数,因而短时傅立叶变换在信号分析上还是存在着不可逾越的缺陷。 小波变换是一种信号的时间—尺度(时间—频率)分析方法,具有多分辨率分析(Multi-resolution)的特点,而且在时频两域都具有表征信号局部特征的能力,使一种窗口大小固定不变,但其形状可改变,时间窗和频率窗都可以改变的时频局部化分析方法。小波变换在低频部分具有较高的频率分辨率和较低的时间分辨率。在高频部分具有较高的时间分辨率和较低的频率分辨率,很适合于探测正常信号中夹带的瞬态反常现象并展示其成分,所以被誉为分析信号的显微镜。 小波分析最早应用在地震数据压缩中, 以后在图像处理、故障诊断等方面取得了传统方法根本无法达到的效果. 现在小波分析已经渗透到了自然科学、应用
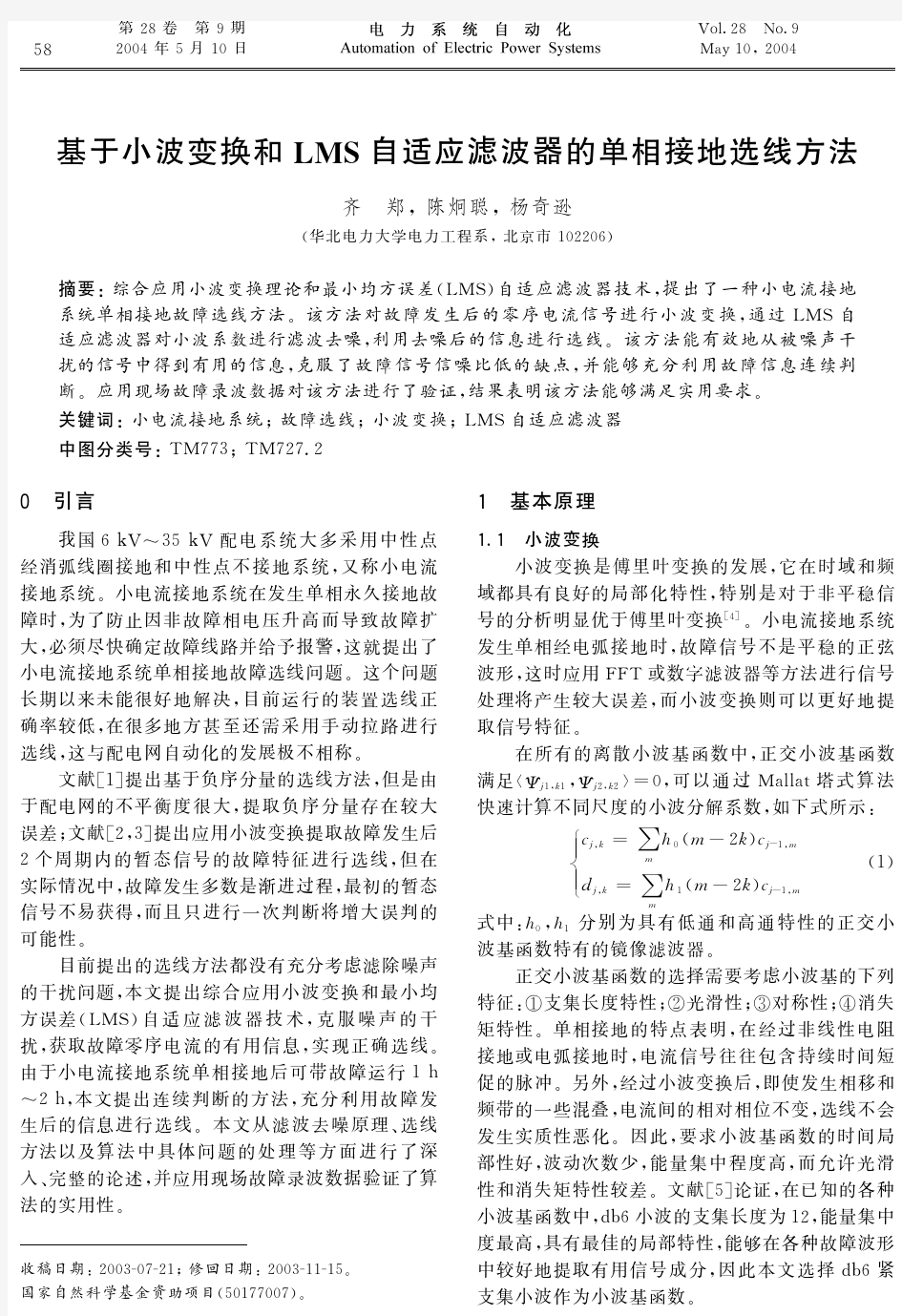
自适应滤波器 MATLAB仿真 摘要 : 本文介绍了自适应滤波器的工作原理,以及推导了著名的LMS( Least mean squares )算法。以一个例子演示了自适应滤波器的滤波效果。实验结果表明,该滤波器滤波效果较好。 关键词:自适应滤波器 MATLAB7.0 LMS 算法 Simulate of adaptive filter based on MATLAB7.0 Abstract: This article described the working principle of adaptive filter and deduced the well-known LMS algorithm. Take an example to demonstrate the adaptive filters filtering effects. The results show that the filter has an effective way to filter single. Key words: LMS algorithm Adaptive Filter Matlab7.0 1引言 由 Widrow B 等提出的自适应滤波理论,是在维纳滤波、卡尔曼滤波等线性滤波基础上发展起来的一种最佳滤波方法。由于它具有更强的适应性和更优的滤波性能,从而广泛应用于通信、系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测和自适应天线阵等诸多领域[1]。自适应滤波器最大的优点在于不需要知道信号和噪声的统计特性的先验知识就可以实现信号的最佳滤波处理。本文通过一个具体例子和结果论证了自适应滤波器的滤波效果。 2自适应滤波原理及 LMS算法 2.1 自适应滤波原理 图 1 自适应滤波原理图 在自适应滤波器中,参数可调的数字滤波器一般为 FIR 数字滤波器, IIR 数字滤波器或格型数字滤波器。自适应滤波分 2 个过程。第一,输入信号想 x(n) 通过参数可调的数字滤波器后得输出信号 y(n) ,y(n) 与参考信号 d(n) 进行比较得误差信号 e(n) ;第二,通过一种自适应算法和 x(n) 和 e(n) 的值来调节参数可调的数字滤波器的参数,即加权系
非常好的滤波器基础知识 滤波器是射频系统中必不可少的关键部件之一,主要是用来作频率选择----让需要的频率信号通过而反射不需要的干扰频率信号。经典的滤波器应用实例是接收机或发射机前端,如图1、图2所示: 从图1中可以看到,滤波器广泛应用在接收机中的射频、中频以及基带部分。虽然对这数字技术的发展,采用数字滤波器有取代基带部分甚至中频部分的模拟滤波器,但射频部分的滤波器任然不可替代。因此,滤波器是射频系统中必不可少的关键性部件之一。滤波器的分类有很多种方法。例如:按频率选择的特性可以分为:低通、高通、带通、带阻滤波器等; 按实现方式可以分为:LC滤波器、声表面波/体声波滤波器、螺旋滤波器、介质滤波器、腔体滤波器、高温超导滤波器、平面结构滤波器。 按不同的频率响应函数可以分为:切比雪夫、广义切比雪夫、巴特沃斯、高斯、贝塞尔函数、椭圆函数等。 对于不同的滤波器分类,主要是从不同的滤波器特性需求来描述滤波器的不同特征。 滤波器的这种众多分类方法所描述的滤波器不同的众多特征,集中体现出了实际工程应用中对滤波器的需求是需要综
合考量的,也就是说对于用户需求来做设计时,需要综合考虑用户需求。 滤波器选择时,首先需要确定的就是应该使用低通、高通、带通还是带阻的滤波器。 下面首先介绍一下按频率选择的特性分类的高通、低通、带通以及带阻的频率响应特性及其作用。 巴特沃斯切比雪夫带通滤波器 巴特沃斯切比雪夫高通滤波器 最常用的滤波器是低通跟带通。低通在混频器部分的镜像抑制、频率源部分的谐波抑制等有广泛应用。带通在接收机前端信号选择、发射机功放后杂散抑制、频率源杂散抑制等方面广泛使用。滤波器在微波射频系统中广泛应用,作为一功能性部件,必然有其对应的电性能指标用于描述系统对该部件的性能需求。对应不同的应用场合,对滤波器某些电器性能特性有不同的要求。描述滤波器电性能技术指标有: 阶数(级数) 绝对带宽/相对带宽 截止频率 驻波 带外抑制 纹波 损耗
1.小波变换的概念 小波(Wavelet)这一术语,顾名思义,“小波”就是小的波形。所谓“小”是指它具有衰减性;而称之为“波”则是指它的波动性,其振幅正负相间的震荡形式。与Fourier变换相比,小波变换是时间(空间)频率的局部化分析,它通过伸缩平移运算对信号(函数)逐步进行多尺度细化,最终达到高频处时间细分,低频处频率细分,能自动适应时频信号分析的要求,从而可聚焦到信号的任意细节,解决了Fourier变换的困难问题,成为继Fourier变换以来在科学方法上的重大突破。有人把小波变换称为“数学显微镜”。 2.小波有哪几种形式?常用的有哪几种?具体用哪种,为什么? 有几种定义小波(或者小波族)的方法: 缩放滤波器:小波完全通过缩放滤波器g——一个低通有限脉冲响应(FIR)长度为2N和为1的滤波器——来定义。在双正交小波的情况,分解和重建的滤波器分别定义。 高通滤波器的分析作为低通的QMF来计算,而重建滤波器为分解的时间反转。例如Daubechies和Symlet 小波。 缩放函数:小波由时域中的小波函数 (即母小波)和缩放函数 (也称为父小波)来定义。 小波函数实际上是带通滤波器,每一级缩放将带宽减半。这产生了一个问题,如果要覆盖整个谱需要无穷多的级。缩放函数滤掉变换的最低级并保证整个谱被覆盖到。 对于有紧支撑的小波,可以视为有限长,并等价于缩放滤波器g。例如Meyer小波。 小波函数:小波只有时域表示,作为小波函数。例如墨西哥帽小波。 3.小波变换分类 小波变换分成两个大类:离散小波变换 (DWT) 和连续小波转换 (CWT)。两者的主要区别在于,连续变换在所有可能的缩放和平移上操作,而离散变换采用所有缩放和平移值的特定子集。 DWT用于信号编码而CWT用于信号分析。所以,DWT通常用于工程和计算机科学而CWT经常用于科学研究。 4.小波变换的优点 从图像处理的角度看,小波变换存在以下几个优点: (1)小波分解可以覆盖整个频域(提供了一个数学上完备的描述) (2)小波变换通过选取合适的滤波器,可以极大的减小或去除所提取得不同特征之间的相关性 (3)小波变换具有“变焦”特性,在低频段可用高频率分辨率和低时间分辨率(宽分析窗口),在高频段,可用低频率分辨率和高时间分辨率(窄分析窗口) (4)小波变换实现上有快速算法(Mallat小波分解算法) 另: 1) 低熵性变化后的熵很低; 2) 多分辨率特性边缘、尖峰、断点等;方法, 所以可以很好地刻画信号的非平稳特性 3) 去相关性域更利于去噪; 4) 选基灵活性: 由于小波变换可以灵活选择基底, 也可以根据信号特性和去噪要求选择多带小波、小波包、平移不变小波等。 小波变换的一个最大的优点是函数系很丰富, 可以有多种选择, 不同的小波系数生成的小波会有不同的效果。噪声常常表现为图像上孤立像素的灰度突变, 具有高频特性和空间不相关性。图像经小波分解后可得到低频部分和高频部分, 低频部分体现了图像的轮廓, 高频部分体现为图像的细节和混入的噪声, 因此, 对图像去噪, 只需要对其高频系数进行量化处理即可。 5.小波变换的科学意义和应用价值
维纳自适应滤波器设计及Matlab实现
摘要 本文从随机噪声的特性出发,分析了传统滤波和自适应滤波基本工作原理和性能,以及滤波技术的现状和发展前景。然后系统阐述了基本维纳滤波原理和自适应滤波器的基本结构模型,接着在此基础上结合最陡下降法引出LMS算法。在MSE准则下,设计了一个定长的自适应最小均方横向滤波器,并通过MATLAB 编程实现。接着用图像复原来验证该滤波器的性能,结果表明图像的质量在MSE 准则下得到了明显的改善。最后分析比较了自适应LMS滤波和频域维纳递归滤波之间的性能。本文还对MATLAB里面的自适应维纳滤波函数wiener2进行了简单分析。 关键字:退化图像维纳滤波自适应滤波最陡下降法LMS
Abstract This paper analyses the basic work theory, performance of traditional filter and adaptive filter based on the property of random noise, and introduce the status quo and the foreground of filter technology. Then we explain basic theory of wiener filter and basic structure model of adaptive filter, and combine the method of steepest descent to deduce the LMS. Afterward according to the MSE rule, we design a limited length transversal filter, and implement by MATLAB. And then we validate performance of adaptive LMS filter by restoring images, Test result show that the quality of the degrade images were improved under the rule of MSE. Finally, we compare the performance of adaptive LMS filter and iterative wiener filter. We also simply analyses the wiener2 () which is a adaptive filter in MATLAB. Keywords: degrade image;wiener filter;adaptive filter;ADF;LMS algorithm
文献综述 小波变换(Wavelet Transform)的概念是1984年法国地球物理学家J.Morlet在分析处理地球物理勘探资料时提出来的。小波变换的数学基础是19世纪的傅里叶变换,其后理论物理学家A.Grossman采用平移和伸缩不变性建立了小波变换的理论体系。1985年,法国数学家Y.Meyer第一个构造出具有一定衰减性的光滑小波。1988年,比利时数学家I.Daubechies证明了紧支撑正交标准小波基的存在性,使得离散小波分析成为可能。1989年S.Mallat提出了多分辨率分析概念,统一了在此之前的各种构造小波的方法,特别是提出了二进小波变换的快速算法,使得小波变换完全走向了实用性。 小波分析是建立在泛函分析、Fourier分析、样条分析及调和分析基础上的新的分析处理工具。它又被称为多分辨率分析,在时域和频域同时具有良好的局部化特性,常被誉为信号分析的“数据显微镜”。近十多年来,小波分析的理论和方法在信号处理、语音分析、模式识别、数据压缩、图像处理、数字水印、量子物理等专业和领域得到广泛的应用。 小波变换分析在数据处理方面的应用主要集中在安全变形监测数据和GPS观测数据的处理,应为他们都对精度用较高的要求,而小波变换分析方法的优势能满足这个要求。在安全变形数据处理主要集中在去噪处理、识别变形的突变点,也包括提取变形特征、分离不同变形频率、估计观测精度、小波变换最佳级数的确定等。在GPS数据处理方面包括:利用小波分析法来检测GPS相位观测值整周跳变的理论与方法,GPS粗差检测、GPS信号多路径误差分析、相位周跳检测、基于小波的GPS双差残差分析等。 国内有关学者和研究人员研究工作如下: 李宗春等研究了变形测量异常数据中小波变换最佳级数的确定,综合分析数据去噪效果的4 个分项评价指标,即数据的均方根差变化量、互相关系数、信噪比及平滑度,将各分项评价指标归化到[0, 1]后相加得到总体评价指标,将总体评价指标最大值所对应的级数定义为小波分解与重构的最佳级数。 贺跃光等研究了基于小波分析的隧道施工地表监测数据处理;基于小波分析原理,对某隧道地表监测数据进行快速去噪、提取变形特征、分离不同变形频率、估计其观测精度等处理分析,使监测结果的误差控制在±1 mm以内,并得出隧道施工对地表变形的影响规律,为隧道的安全施工和质量控制提供了依据。 周大华等研究了基于小波分析的隧道监测数据处理。基于小波分析理论,对一组隧道洞内水平收敛监测数据进行了去噪重构。实际分析结果表明,小波分析能够有效地去除监
自适应滤波器:根据环境的改变,使用自适应算法来改变滤波器的参数和结构。这样的滤波器就称之为自适应滤波器。 数学原理编辑 以输入和输出信号的统计特性的估计为依据,采取特定算法自动地调整滤波器系数,使其达到最佳滤波特性的一种算法或装置。自适应滤波器可以是连续域的或是离散域的。离散域自适应滤波器由一组抽头延迟线、可变加权系数和自动调整系数的组成。附图表示一个离散域自适应滤波器用于模拟未知离散系统的信号流图。自适应滤波器对输入信号序列x(n)的每一个样值,按特定的算法,更新、调整加权系数,使输出信号序列y(n)与期望输出信号序列d(n)相比较的均方误差为最小,即输出信号序列y(n)逼近期望信号序列d(n)。 20世纪40年代初期,N.维纳首先应用最小均方准则设计最佳线性滤波器,用来消除噪声、预测或平滑平稳随机信号。60年代初期,R.E.卡尔曼等发展并导出处理非平稳随机信号的最佳时变线性滤波设计理论。维纳、卡尔曼-波色滤波器都是以预知信号和噪声的统计特征为基础,具有固定的滤波器系数。因此,仅当实际输入信号的统计特征与设计滤波器所依据的先验信息一致时,这类滤波器才是最佳的。否则,这类滤波器不能提供最佳性能。70年代中期,B.维德罗等人提出自适应滤波器及其算法,发展了最佳滤波设计理论。 以最小均方误差为准则设计的自适应滤波器的系数可以由维纳-霍甫夫方程解得 式中W(n)为离散域自适应滤波器的系数列矩阵(n)为输入信号序列x(n)的自相关矩阵的逆矩阵,Φdx(n)为期望输出信号序列与输入信号序列x(n)的互相关列矩阵。 B.维德罗提出的一种方法,能实时求解自适应滤波器系数,其结果接近维纳-霍甫夫方程近似解。这种算法称为最小均方算法或简称 LMS法。这一算法利用最陡下降法,由均方误差的梯度估计从现时刻滤波器系数向量迭代计算下一个时刻的系数向量 式中憕【ε2(n)】为均方误差梯度估计, k s为一负数,它的取值决定算法的收敛性。要求,其中λ为输入信号序列x(n)的自相关矩阵最大特征值。 自适应 LMS算法的均方误差超过维纳最佳滤波的最小均方误差,超过量称超均方误差。通常用超均方误差与最小均方误差的比值(即失调)评价自适应滤波性能。
自适应滤波器原理及经典教材下载地址 Pdg格式教材(Adaptive Filter Theory.X.H.)的下载地址在最后,安装绿色板BooX Viewer 1.0 [ PDG阅读器]即可阅读,该阅读器很小,无需安装。也可用超星。 自适应滤波器是能够根据输入信号自动调整性能进行数字信号处理的数字滤波器。作为对比,非自适应滤波器有静态的滤波器系数,这些静态系数一起组成传递函数。 对于一些应用来说,由于事先并不知道所需要进行操作的参数,例如一些噪声信号的特性,所以要求使用自适应的系数进行处理。在这种情况下,通常使用自适应滤波器,自适应滤波器使用反馈来调整滤波器系数以及频率响应。 总的来说,自适应的过程涉及到将价值函数用于确定如何更改滤波器系数从而减小下一次迭代过程成本的算法。价值函数是滤波器最佳性能的判断准则,比如减小输入信号中的噪声成分的能力。 随着数字信号处理器性能的增强,自适应滤波器的应用越来越常见,时至今日它们已经广泛地用于手机以及其它通信设备、数码录像机和数码照相机以及医疗监测设备中。 概述 根据环境的改变,使用自适应算法来改变滤波器的参数和结构。这样的滤波器就称之为自适应滤波器。 一般情况下,不改变自适应滤波器的结构。而自适应滤波器的系数是由自适应算法更新的时变系数。即其系数自动连续地适应于给定信号,以获得期望响应。自适应滤波器的最重要的特征就在于它能够在未知环境中有效工作,并能够跟踪输入信号的时变特征。 数学原理
以输入和输出信号的统计特性的估计为依据,采取特定算法自动地调整滤波器系数,使其达到最佳滤波特性的一种算法或装置。自适应滤波器可 自适应滤波器 以是连续域的或是离散域的。离散域自适应滤波器由一组抽头延迟线、可变加权系数和自动调整系数的机构组成。附图表示一个离散域自适应滤波器用于模拟未知离散系统的信号流图。自适应滤波器对输入信号序列x(n)的每一个样值,按特定的算法,更新、调整加权系数,使输出信号序列y(n)与期望输出信号序列d(n)相比较的均方误差为最小,即输出信号序列y(n)逼近期望信号序列d(n)。 20世纪40年代初期,N.维纳首先应用最小均方准则设计最佳线性滤波器,用来消除噪声、预测或平滑平稳随机信号。60年代初期,R.E.卡尔曼等发展并导出处理非平稳随机信号的最佳时变线性滤波设计理论。维纳、卡尔曼-波色滤波器都是以预知信号和噪声的统计特征为基础,具有固定的滤波器系数。因此,仅当实际输入信号的统计特征与设计滤波器所依据的先验信息一致时,这类滤波器才是最佳的。否则,这类滤波器不能提供最佳性能。70年代中期,B.维德罗等人提出自适应滤波器及其算法,发展 了最佳滤波设计理论。 以最小均方误差为准则设计的自适应滤波器的系数可以由维纳-霍甫 夫方程解得 式中W(n)为离散域自适应滤波器的系数列矩阵(n)为输入信号序列x(n)的自相关矩阵的逆矩阵,Φdx(n)为期望输出信号序列与输入信号序列x(n)的互相关列矩阵。 B.维德罗提出的一种方法,能实时求解自适应滤波器系数,其结果接近维纳-霍甫夫方程近似解。这种算法称为最小均方算法或简称 LMS法。这一算法利用最陡下降法,由均方误差的梯度估计从现时刻滤波器系数向量迭代计算下一个时刻的系数向量 …… 下载地址: https://www.doczj.com/doc/4d8053984.html,/zh-cn/files/8074f56b-c2a1-11e0-bf2f-0015c55db73d/