光电编码器选型及同步电机转速和
转子位置测量3
于庆广 刘葵 王冲 袁炜嘉 钱炜慷 张程
清华大学
摘要:光电轴角编码器,又称光电角位置传感器,是电气传动系统中用来测量电动机转速和转子位置的核心部件。对绝对式、增量式和混合式光电轴编码器的工作原理进行了综述,介绍了光电轴编码器的选型原则、转子速度的测量和转子位置的测量方法。最后,给出了同步电动机变频调速系统中转速和转子位置测量系统的实现。
关键词:光电轴编码器 混合式轴编码器 同步电机转子位置
Choice of Optical2encoder and Measure of Speed and R otor
Place of Synchronous Motor
Yu Qingguang Liu Kui Wang Chong Yuan Weijia Qian Weikang Zhang Cheng Abstract:Optical2encoder,which is also called photoelectric angei2position sensor,is the core device in measurement of motor speed and rotor position in drive system.There summarize the operating principle of ab2 solute、incremental and hybrid encoder,introduce the choice principle of optical2encoder model and the measur2 ing method of rotor speed and rotor position.The implementation of measuring method of rotor speed and ro2 tor position in variable frequency speed2regulated system of synchronous motor is also given.
K eyw ords:optical2encoder hybrid2encoder rotor place of synchronous motor
1 引言
光电轴角编码器,又称轴编码器或光电角位置传感器。光电轴编码器以高精度计量圆光栅为检测元件,通过光电转换,将输入的角位置信息转换成相应的数字代码,并与计算机等控制器及显示装置相连接,实现数字测量、数字控制与数字显示[1]。光电轴编码器具有较高的性能价格比,已普遍应用在雷达、光电经纬仪、地面指挥仪、机器人、数控机床和高精度闭环调速系统等诸多领域,是电动机等自动化设备理想的角度和速度传感器。轴编码器主要分为增量式、绝对式与混合式3种,其中增量式轴编码器主要用于测量转子速度,绝对式轴编码器主要用于测量转子的空间位置,混合式轴编码器是增量式轴编码器与绝对式轴编码器的组合。后端加入处理芯片之后,3种轴编码器都具有测量转子速度与空间位置的功能。本文综述了光电轴编码器的种类和选型原则,介绍了转速和转子位置的测量方法;最后,给出了同步电动机变频调速系统中转速和转子位置测量系统的实现。
2 光电轴编码器
2.1 增量式轴编码器
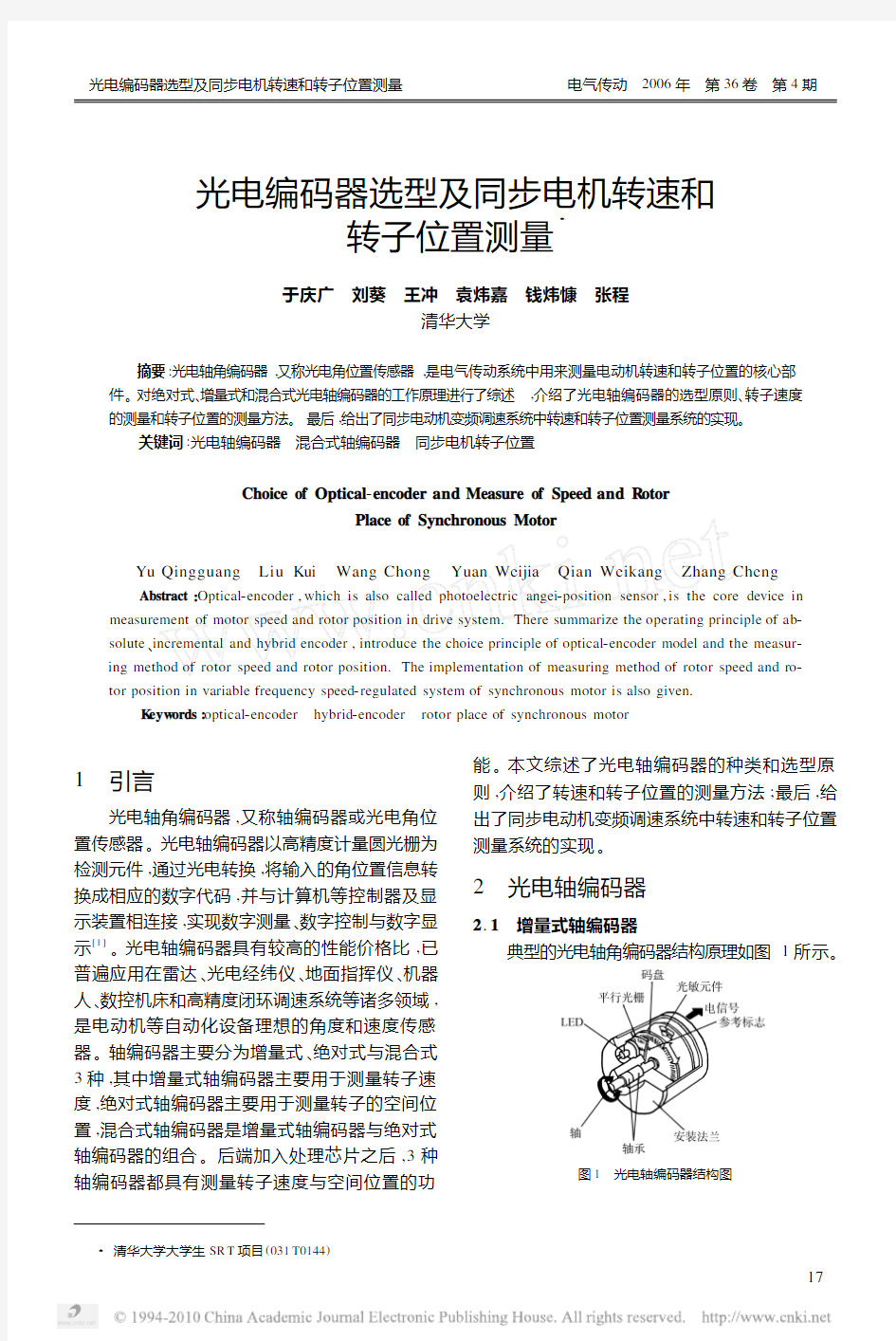
典型的光电轴角编码器结构原理如图1
所示。
图1 光电轴编码器结构图
71
3清华大学大学生SR T项目(031T0144)
L ED 是光源,光敏元件通过码盘接受光信号,输
出电信号。根据码盘结构的不同,有增量式和绝对式两种轴编码器。
增量式编码器的码盘如图2所示,码盘的刻线间距均等,对应每一个分辨率区间,可输出一个增量脉冲
。
图2 增量式轴编码器码盘
增量式轴编码器的输出波形如图3所示,增量式编码器输出有A ,B 正交脉冲两路,零脉冲Z 一路。一般A ,B 端口每转输出1000~5000个脉冲,Z 端口每转输出1个脉冲。Z 信号用于校正每转编码器产生的脉冲个数,进一步将误差控制在每一转之内,避免了积累误差的产生。若要区别电机转子旋转的方向,就要根据A ,B 两路脉冲信号的相位来判断正转和反转
[2]。
图3 增量式轴编码器的输出波形
增量式编码器的优点是易于实现小型化,响应迅速,结构简单,其缺点是掉电后容易造成数据损失,且有误差累积现象。2.2 绝对式轴编码器
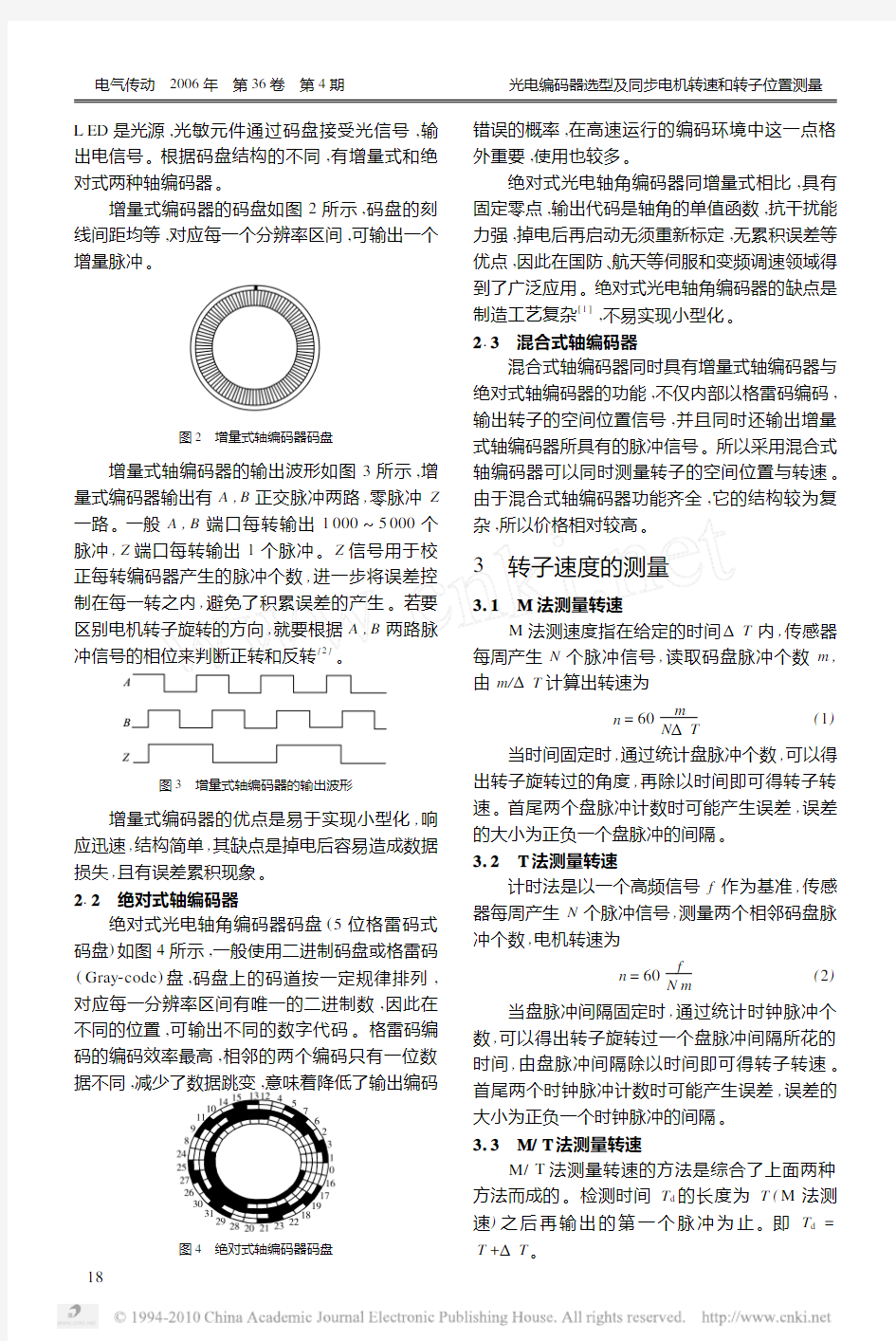
图4 绝对式轴编码器码盘
绝对式光电轴角编码器码盘(5位格雷码式码盘)如图4所示,一般使用二进制码盘或格雷码(Gray 2code )盘,码盘上的码道按一定规律排列,
对应每一分辨率区间有唯一的二进制数,因此在不同的位置,可输出不同的数字代码。格雷码编码的编码效率最高,相邻的两个编码只有一位数据不同,减少了数据跳变,意味着降低了输出编码
错误的概率,在高速运行的编码环境中这一点格外重要,使用也较多。
绝对式光电轴角编码器同增量式相比,具有固定零点,输出代码是轴角的单值函数,抗干扰能力强,掉电后再启动无须重新标定,无累积误差等优点,因此在国防、航天等伺服和变频调速领域得到了广泛应用。绝对式光电轴角编码器的缺点是制造工艺复杂[1],不易实现小型化。2.3 混合式轴编码器
混合式轴编码器同时具有增量式轴编码器与绝对式轴编码器的功能,不仅内部以格雷码编码,输出转子的空间位置信号,并且同时还输出增量
式轴编码器所具有的脉冲信号。所以采用混合式轴编码器可以同时测量转子的空间位置与转速。由于混合式轴编码器功能齐全,它的结构较为复杂,所以价格相对较高。
3 转子速度的测量
3.1 M 法测量转速
M 法测速度指在给定的时间ΔT 内,传感器
每周产生N 个脉冲信号,读取码盘脉冲个数m ,
由m/ΔT 计算出转速为
n =60
m
N ΔT (1)
当时间固定时,通过统计盘脉冲个数,可以得
出转子旋转过的角度,再除以时间即可得转子转速。首尾两个盘脉冲计数时可能产生误差,误差的大小为正负一个盘脉冲的间隔。3.2 T 法测量转速
计时法是以一个高频信号f 作为基准,传感器每周产生N 个脉冲信号,测量两个相邻码盘脉冲个数,电机转速为
n =60
f
N m
(2)
当盘脉冲间隔固定时,通过统计时钟脉冲个数,可以得出转子旋转过一个盘脉冲间隔所花的时间,由盘脉冲间隔除以时间即可得转子转速。首尾两个时钟脉冲计数时可能产生误差,误差的大小为正负一个时钟脉冲的间隔。3.3 M/T 法测量转速
M/T 法测量转速的方法是综合了上面两种
方法而成的。检测时间T d 的长度为T (M 法测
速)之后再输出的第一个脉冲为止。即T d =T +ΔT 。
8
1
若电机在T(s)时间内转过X(rad)角,那么转速应是
n=60X
2πT d
=
60X
2π(T+ΔT)
(3)
T d时间内传感器产生m1个脉冲,则角位移应是
X=2πm1/N(4)另一方面,在T d时间内可计取时钟脉冲f c的脉冲数为m2,则T d表示为
T d=m2/f c(5)这样,被测转速(r/min)为
n=60f c m1
N m2
(6)
3种方法中,M法在低速时分辨率不高,T法在高速时分辨率低,M/T法与速度几乎无关。从精度角度而言,也是M/T法误差小,精度高[4]。但在低速时为保证结果的准确性,该方法需要较长的检测时间,这样就无法满足转速检测系统的快速动态响应指标,因而又出现了变M/T测速法。其原理见文献[5]。
4 同步电动机转子位置测量
4.1 采用绝对式编码器测电机转子位置
该方法需要在同步电动机转子上同轴联结一个绝对式光电编码器,为提高检测的可靠性常采用格雷码式码盘。5位格雷码式码盘如图4所示,该码盘低4位输出频率依次降低1/2,第5位输出频率与第4位输出频率相同,但相位相差90°,实现相邻位置并行输出的5位二进制数只有其中一位发生变化。同步电动机转子旋转一周,码盘输出32个数,即将转子一周的空间角度32等分,每一等分用5位二进制数字编码,代表转子的空间位置。每一个二进制数所代表的空间电角度为360°×p/32 (p为电机的极对数)。随着电动机的极对数增加,码盘的分辨率降低,即检测精度降低。为保证检测精度必须增加编码器的位数,常采用多位(12位)格雷码绝对式光电编码器。
4.2 采用绝对式编码器测转子初始位置
绝对式光电编码器转子位置检测是通过分析码盘并行输出信号实现,然而与同步机转子同轴联结的码盘将因安装方向不同而使同一转子位置输出不同的信号,因此码盘安装后电动机运行前,需确定转子的初始位置,即转子轴线d轴与定子A相绕组轴线重合时码盘的输出值。该过程称为初始定位。
初始定位是在电机空载,转子励磁的情况下,三相定子绕组按下列要求通入直流电流
i a=I R i b=-0.5I R i c=-0.5I R(7)式中,I R为直流给定值,约为电机额定电流的1/3。
电动机主回路通电后,电动机将朝初始位置旋转,且在初始位置作减幅振荡,待电机静止后,码盘的输出值即为转子初始位置值。工作原理简述如下。
当定子绕组按式(7)通入直流电流时,由式(8)可得定子电流空间矢量
i=
2
3
(i a+i b e j120°+i c e-j120°)
=I R(8)式(8)表明,定子电流空间矢量i的幅值为I R,且位于A轴上。由电机学可知,电动机的电磁转矩使转子朝定子磁通矢量方向旋转。因定子电流为直流电流,定子磁通矢量静止不动,且初始定位时同步电动机空载,故电机停止旋转时电磁转矩为零,即d轴与A轴重合,此时码盘的输出值即为转子初始位置值。经过多次初始定位,即可确定准确的初始位置值[6]。
4.3 采用增量式编码器测转子位置
使用增量式编码器实现电机转子位置检测的方法如下。
假定它在旋转过程中给定时间T(s)内给出脉冲数目为m,则电机转速n(r/min)可表示为
n=60×m/T×N
式中:N为光电编码盘每转输出的脉冲数。
假定电机在静止时转子的初始位置角(电角度)是θ0,电机的极对数为p,则从静止开始经过时间T(s)后的电机转子位置(机械角)与电机速度之间的关系为
θ=θ
0/p+(n×T/60)×2π
=θ0/p+2π×m/N(9)若用电角度表示,则为
θ=θ
0+2π×p×m/N(10)在第i个采样时间结束后,即第i个采样值为
θ
i=
θi-1+2π×p×m i/N(11)式中:i为自然数;m i为第i个采样周期的脉冲计数值。
只要知道电机转子的初始位置角θ0,则转子
91
任意时刻的位置都可通过式(11)求得。4.4 采用增量式编码器测转子初始位置
采用增量式光电编码器测转子初始位置与采用绝对式编码器测转子初始位置的原理基本相同。同样的,初始定位是在电机空载,转子励磁的情况下,三相定子绕组按式(7)通入直流电流。
电动机主回路通电后,电动机将朝初始位置旋转,且在初始位置作减幅振荡,待电机静止后,记录码盘的输出脉冲个数m 0,则转子的初始位置
角θ0=2πp m 0/N 。经过多次初始定位,即可确定准确的初始位置值。这里要注意,由于电机在初
始位置振荡,因此需注意m 0的测量要采用无误差测量的电路结构[7]。
文献[8]给出另一种类似同步电动机模拟器的同步电机转子位置的检测方法。
5 FP GA 的转速和转子位置的实现
可编程CPLD/FP GA 是用来测量转速和转子位置的最好选择之一。图5所示为转速和转子位置检测器原理框图,它由与电机同轴连接的光电码盘、可编程器件CPLD/FP GA 等组成。CPLD/FP GA 接受光电轴编码器的输出,将计算出来的转速和转子位置通过光纤送给主控制器,完成转速和转子位置闭环控制
。
图5 转速和转子位置检测器原理框图
考虑到编码器的输出方式分增量式和绝对式
两种,本文设计了如图6所示的CPLD/FP GA 系统。
其中,增量式部分由译码器、互锁电路、正反向计数链及可逆计数器构成。绝对式部分主要由数据锁存器构成。对高频时钟进行分频即可得到采样脉冲序列。当出现一采样脉冲时,锁存器1锁存当前时刻的绝对式输出信号,等到下一次采样脉冲出现时,锁存器2将前一时刻的信号锁存,同时新的绝对式输出信号由锁存器1锁存。数据处理器对计数器值或锁存器的信号进行处理,并将处理后的转子位置和转速信号由三态缓冲器输出,此输出信号一路接数码管显示,另一路经并转串电路由光纤送至主控制器
。
图6 CPLD/FP GA 系统的实现
本测量单元在作者研制的10kW 同步电机
变频调速系统中得到应用,效果非常好。本测量单元也可以作为混合式编码器的测量单元、数字式速度显示表或速度监控装置。
6 结论
本文综述了绝对式、增量式和混合式光电轴编码器的工作原理和选型原则,介绍了电机转子速度和转子位置测量的几种方法。最后,给出了基于FP GA 的同步电动机变频调速系统中转速和转子位置测量单元的实现。
参考文献
1 董莉莉,熊经武,万秋华.光电轴角编码器的发展动态
[J ].光学精密工程,2000,8(2):198~204
2 袁宏,郭淑芳.数控机床用新型位置和速度传感器[J ].
沈阳工业大学学报,1994,16(1):56~63
3 王国辉.绝对式轴编码器应用于运动机械方面的优越
性[J ].光机电信息,1999,16(12):12~13
4 曲家骐,王季佚.伺服控制系统中的传感器[M ].北京:
机械工业出版社,1999
5 李为民,姜漫.基于光电编码器的速度反馈与控制技
术[J ].现代电子技术,2004,27(23):84~86
6 伍小杰,戴鹏,姜建国.同步电动机转子位置检测的一
种方法及实现[J ].电气传动,2001,31(1):22~23
7 陈敏捷,田国璋.旋转编码器的抗抖动计数电路[J ].电
子技术应用,2001,27(11):70~72
8 朱春毅,李崇坚,干永革等.交交变频同步电动机转子
位置检测研究[J ].冶金自动化,1994,18(5):8~12
收稿日期:2005205230修改稿日期:2005207218
2
光电编码器选型及同步电机转速和 转子位置测量3 于庆广 刘葵 王冲 袁炜嘉 钱炜慷 张程 清华大学 摘要:光电轴角编码器,又称光电角位置传感器,是电气传动系统中用来测量电动机转速和转子位置的核心部件。对绝对式、增量式和混合式光电轴编码器的工作原理进行了综述,介绍了光电轴编码器的选型原则、转子速度的测量和转子位置的测量方法。最后,给出了同步电动机变频调速系统中转速和转子位置测量系统的实现。 关键词:光电轴编码器 混合式轴编码器 同步电机转子位置 Choice of Optical2encoder and Measure of Speed and R otor Place of Synchronous Motor Yu Qingguang Liu Kui Wang Chong Yuan Weijia Qian Weikang Zhang Cheng Abstract:Optical2encoder,which is also called photoelectric angei2position sensor,is the core device in measurement of motor speed and rotor position in drive system.There summarize the operating principle of ab2 solute、incremental and hybrid encoder,introduce the choice principle of optical2encoder model and the measur2 ing method of rotor speed and rotor position.The implementation of measuring method of rotor speed and ro2 tor position in variable frequency speed2regulated system of synchronous motor is also given. K eyw ords:optical2encoder hybrid2encoder rotor place of synchronous motor 1 引言 光电轴角编码器,又称轴编码器或光电角位置传感器。光电轴编码器以高精度计量圆光栅为检测元件,通过光电转换,将输入的角位置信息转换成相应的数字代码,并与计算机等控制器及显示装置相连接,实现数字测量、数字控制与数字显示[1]。光电轴编码器具有较高的性能价格比,已普遍应用在雷达、光电经纬仪、地面指挥仪、机器人、数控机床和高精度闭环调速系统等诸多领域,是电动机等自动化设备理想的角度和速度传感器。轴编码器主要分为增量式、绝对式与混合式3种,其中增量式轴编码器主要用于测量转子速度,绝对式轴编码器主要用于测量转子的空间位置,混合式轴编码器是增量式轴编码器与绝对式轴编码器的组合。后端加入处理芯片之后,3种轴编码器都具有测量转子速度与空间位置的功能。本文综述了光电轴编码器的种类和选型原则,介绍了转速和转子位置的测量方法;最后,给出了同步电动机变频调速系统中转速和转子位置测量系统的实现。 2 光电轴编码器 2.1 增量式轴编码器 典型的光电轴角编码器结构原理如图1 所示。 图1 光电轴编码器结构图 71 3清华大学大学生SR T项目(031T0144)
测速编码器技术参数 电机的位置检测在电机控制中是十分重要的,特别是需要根据精确转子位置控制电机运动状态的应用场合,如位置伺服系统。电机控制系统中的位置检测通常有:微电机解算元件,光电元件,磁敏元件,电磁感应元件等。这些位置检测传感器或者与电机的非负载端同轴连接,或者直接安装在电机的特定的部位。其中光电元件的测量精度较高,能够准确的反应电机的转子的机械位置,从而间接的反映出与电机连接的机械负载的准确的机械位置,从而达到精确控制电机位置的目的。本文主要介绍高精度的光电编码器的内部结构、工作原理与位置检测的方法。 一.光电编码器的介绍: 光电编码器是通过读取光电编码盘上的图案或编码信息来表示与光电编码器相连的电机转子的位置信息的。根据光电编码器的工作原理可以将光电编码器分为绝对式光电编码器与增量式光电编码器,下面我就这两种光电编码器的结构与工作原理做介绍。 1、绝对式光电编码器 绝对式光电编码器如图所示,他是通过读取编码盘上的二进制的编码信息来表示绝对位置信息的。编码盘是按照一定的编码形式制成的圆盘。图1是二进制的编码盘,图中空白部分是透光的,用“0”来表示;涂黑的部分是不透光的,用“1”来表示。通常将组成编码的圈称为码道,每个码道表示二进制数的一位,其中最外侧的是最低位,最里侧的是最高位。如果编码盘有4个码道,则由里向外的码道分别表示为二进制的23、22、21和20,4位二进制可形成16个二进制数,因此就将圆盘划分16个扇区,每个扇区对应一个4位二进制数,如0000、0001、…、1111。 按照码盘上形成的码道配置相应的光电传感器,包括光源、透镜、码盘、光敏二极管和驱动电子线路。当码盘转到一定的角度时,扇区中透光的码道对应的光敏二极管导通,输出低电平“0”,遮光的码道对应的光敏二极管不导通,输出高电
说明书摘要 本发明公开一种永磁同步电机转子初始位置的判断方法,步骤是:首先利用脉振高频电压注入法得到初次估计的转子位置,然后在初次估计的交轴上注入一个正方向扰动信号,再估计转子位置,根据估计得到的转速方向判断磁极极性,得到电机转子初始位置。此种方法可解决脉振高频电压信号注入法检测转子初始位置时磁极极性的收敛问题,无需在直轴上注入正负方向的脉冲电流,可以有效地实现转子初始位置估算。
摘要附图
1、一种永磁同步电机转子初始位置的判断方法,其特征在于包括如下步骤: (1)在??d q -估计同步旋转坐标系的?d 轴上注入高频电压信号?cos()d mh h u U t ω=,给定?q 轴电压?0q u =; (2)检测电机的两相电流,并经过Clarke 和Park 坐标系变换,得到??d q -估计同步旋转坐标系的?q 轴电流?q i ,并依照以下步骤估计转子的位置和转速:首先,将检测得到的?q 轴电流?q i 乘以调制信号cos()t h u t ω=;然后,对相乘后所得的信号低通滤波,得到?q 轴电流?q i 的幅值信号()f θ?;最后,对该幅值信号()f θ?进行PI 调节,得到估计转速?ω ,对估计转速?ω积分得到估计的转子位置; (3)重复步骤(2),直至估计的转子位置收敛为一恒定值,即为初次估计 的转子位置?first θ; (4)在??d q -估计同步旋转坐标系的?d 轴上注入高频电压信号?cos()d mh h u U t ω=,在?q 轴注入一个正方向扰动信号,重复步骤(2),直至电机转过一定角度γ,0γ>; (5)根据步骤(3)估计得到的转速方向判断磁极极性,当转速为正时,收 敛的磁极极性为N 极,转子初始位置??=initial first θθ;当转速为负时,收敛的磁极极性为S 极,转子初始位置??=initial first θθπ+。 2、如权利要求1所述的一种永磁同步电机转子初始位置的判断方法,其特 征在于:所述步骤(1)中,采用转子的估计位置?θ进行Park 逆变换,获得实际两相静止坐标系下电压的给定值?u α和?u β。
制作速度检测部件 实验报告 专业:机械设计制造及其自动化 姓名:xxx 学号:xxx 实验时间:2012-2013学年第2学期
制作速度检测部件 一、实验原理: 1.利用外部中断0对信号源在一定时间内产生的脉冲进行计数,并对外部中断0设置为跳变沿中断(IT0=1) 2.利用定时器0进行计时,并在中断程序中读取这段时间内产生的脉冲数,再利用脉冲数与路程之间的对应关系求得编码器的速度。 3. 光电开关的使用,如图: 测速方法: M 法测速 测取c T 时间内旋转编码器输出的脉冲个数1M ,用以计算这段时间内的平均转速,称作M法测速,图12所示。电机的转速为 r/min 601 c ZT M n = , M 法测速的分辨率: c c c ZT ZT M ZT M Q 60 60)1(6011= -+= M 法测速误差率: c T 1 M 图12 M 测速法原理图
% 1001%10060 ) 1(60 60%1111max ?=?-=M ZT M ZT M ZT M c c c δM 法测速适用于高速段, T 法测速 记录编码器两个相邻输出脉冲的间的高频脉冲个数M2,f0为高频脉冲频率,图13所示。 电机转速 r/min ZM f 60ZT 60n 2 t == T 法测速的分辨率: )1(6060)1(602202020-=--=M ZM f ZM f M Z f Q 或Zn f Zn Q -= 02 60 T法测速误差率: % 10011 %10060 60 )1(60%22 020 20max ?-=?-=M ZM f ZM f M Z f δ T 法测速适用于低速段。 M/T 法测速 把M 法和T 法结合起来,既检测TC 时间内旋转编码器输出的脉冲个数M1,又检测同一时间间隔的高频时钟脉冲个数M2,用来计算转速,称作M/T 法测速。采用M/T 法测速时,应保 2 M 2f M T t =图13 T 测速法 c T 1 M 2 M 图14 M/T 法测速原理图
无刷直流电机转子位置检测的新方法 作者:山东大学陈瑜黄玉王兴华 要 摘要:介绍了无刷直流电机无位置传感器转子位置检测的一种新方法。该方法利用非导通相反电势逻辑电平经逻辑处理后得到一脉冲列,采用PLL锁相技术将脉冲列倍频,通过倍频电路计数器的计数值可以精确检测转子位置。利用数字比较技术将计数值与锁存器中的预置数值比较,可以精确控制绕组电流的最佳换向时刻。通过调节锁存器中的预置值可以方便地调节换向角,非常适用于无刷直流电机的各种控制算法。同时该方法克服了外同步起动过程中易产生的振荡和失步现象。通过实验证明该方法是正确的、有效的。 关键词:无刷电机;无位置传感器;检测 1引言 无刷直流电机运行时需要采用位置传感器检测转子磁场位置信号,以控制逆变器功率管的换流,实现电机的自同步运行。传统的位置传感器是采用电子式或机电式传感器件直接测量,如霍尔效应器件(HED)、光学编码器、旋转变压器等。然而,这些传感器有以下缺点: ①分辨率低或运行特性不好,有的对环境条件很敏感,如振动、潮湿和温度变化都会使性能下降。 ②增加了电气连接数目,给抗干扰设计带来一定困难。 ③占用电机结构空间,限制了电机的小型化。 因此,无刷直流电机的无位置传感器化技术近年来日益受到人们的关注,国内外研究人员在这方面进行了积极的研究,提出了诸多方法,主要可分为反电势法、电感法、磁链法、旋转坐标系法、观测器法、卡尔曼滤波器法等[1~4]。反电势法简单、可靠,得到了广泛应用,其它方法由于计算复杂、对参数的鲁棒性差等原因应用较少。但反电势法的缺点是: ①低速时反电势小,难以得到有效转子位置信号,系统低速性能差。 ②需用低通滤波器去掉端电压中高频噪声并移相30°以满足换流要求,对滤波器要求较高,同时滤波器容易产生移相误差,而且移相误差大小与速度有关,难以补偿[5]。 ③对换相角调节困难,无法控制换相角γ(超前或滞后)的大小。 ④若采用外同步脉冲起动,当驱动信号由外同步脉冲驱动向内同步脉冲驱动切换时,由于切换点的相位误差易产生振荡甚至失步[6]。 针对以上问题,本文提出了一种新型转子位置检测的方法,以三相6拍运行的无刷直
编码器的测速原理:M/T法 大家都比较清楚在闭环伺服系统中,编码器的反馈脉冲个数和系统所走位置的多少成正比,但对于怎样通过编码器所反馈的脉冲个数来求得电机的旋转速度了解的人就不是很多了。 根据脉冲计数来测量转速的方法有以下三种:(1)在规定时间内测量所产生的脉冲个数来获得被测速度,称为M法测速;(2)测量相邻两个脉冲的时间来测量速度,称为T法测速;(3)同时测量检测时间和在此时间内脉冲发生器发出的脉冲个数来测量速度,称为M/T 法测速。以上三中测速方法中,M法适合于测量较高的速度,能获得较高分辨率;T法适合于测量较低的速度,这时能获得较高的分辨率;而M/T法则无论高速低速都适合测量。以下只对T法测速进行详细介绍。 T法测速的原理是用一已知频率fc(此频率一般都比较高)的时钟脉冲向一计数器发送脉冲,计数器的起停由码盘反馈的相邻两个脉冲来控制,原理图见图1。若计数器读数为m1,则电机每分钟转速为nM=60fc/Pm1(r/min) 图1 T法测速原理 其中P为码盘一圈发出的脉冲个数即码盘线数,m1为 相邻两个脉冲间高频脉冲个数。测速分辨率:当对应转速由n1变为n2时则分辨率Q的定义为Q=n2-n1,Q值越小说明测量装置对转速变化越敏感即分辨率越高。因此可以得到T法测速的分辨率为 Q=60fc/Pm1-60fc/P(m1+1)= n2M P/(60fc+ nMP) 由上式可见随着转速nM的降低,Q值越小,即T法测速在低速时有较高的分辨率。 MT法测速之定量分析 速度测量是工控系统中最基本的需求之一,最常用的是用数字脉冲测量某根轴的转速,再根据机械比、直径换算成线速度。脉冲测速最典型的方法有测频率(M法)和测周期(T法)。定性分析: M法是测量单位时间内的脉数换算成频率,因存在测量时间内首尾的半个脉冲问题,可能会有2个脉的误差。速度较低时,因测量时间内的脉冲数变少,误差所占的比例会变大,所以M法宜测量高速。如要降低测量的速度下限,可以提高编码器线数或加大测量的单位时间,使用一次采集的脉冲数尽可能多。 T法是测量两个脉冲之间的时间换算成周期,从而得到频率。因存在半个时间单位的问题,可能会有1个时间单位的误差。速度较高时,测得的周期较小,误差所占的比例变大,所以T法宜测量低速。如要增加速度测量的上限,可以减小编码器的脉冲数,或使用更小更精确的计时单位,使一次测量的时间值尽可能大。 M法、T法各且优劣和适应范围,编码器线数不能无限增加、测量时间也不能太长(得考虑实时性)、计时单位也不能无限小,所以往往候M法、T法都无法胜任全速度范围内的测量。因此产生了M法、T法结合的M/T 测速法:低速时测周期、高速时测频率。 定量分析:
电机的温度与温升 衡量电机发热程度是用“温升”而不是用“温度”,当“温升”突然增大或超过最高工作温度时,说明电机已发生故障。下面就一些基本概念进行讨论。 1 绝缘材料的绝缘等级 绝缘材料按耐热能力分为Y、A、E、B、F、H、C7个等级,其极限工作温度分别为90、105、120、130、155、180℃、及180℃以上。性能参考温度(℃)A80 E95 B100 F120 H145 绝缘材料根据热稳定性可分为如下7个等级: 1,Y级,90度,棉花 2,A级,105度, 3,E级,120度 4,B级,130度,云母 5,F级,155度,环氧树脂 6,H级,180度,硅橡胶 7,C级,180度以上 常用的B级电机,其内部的绝缘材料往往是F级的,而铜线可能使用H级甚至更高的,来提高其质量。 一般为提高使用寿命,往往规定高级绝缘要求,低一级来考核。比如,常见的F级绝缘的电机,做B级来考核,即其温升不能超过120度(留10度作为余量,以避免工艺不稳定造成个别电机温升超差)。 所谓绝缘材料的极限工作温度,系指电机在设计预期寿命内,运行时绕组绝缘中最热点的温度。根据经验,A级材料在105℃、B级材料在130℃的情况下寿命可达10年,但在实际情况下环境温度和温升均不会长期达设计值,因此一般寿命在15~20年。如果运行温度长期超过材料的极限工作温度,则绝缘的老化加剧,寿命大大缩短。所以电机在运行中,温度是寿命的主要因素之一。 2 温升 温升是电机与环境的温度差,是由电机发热引起的。运行中的电机铁芯处在交变磁场中会产生铁损,绕组通电后会产生铜损,还有其它杂散损耗等。这些都会使电机温度升高。另
第16卷第7期2012年7月 电机与控制学报 ELECTRI C MACHINES AND CONTROL Vol.16No.7 July2012 城轨牵引内置式永磁同步电机转速及转子位置检测 盛义发1,2,刘升学1,喻寿益2,桂卫华2 (1.南华大学电气工程学院,湖南衡阳421001;2.中南大学信息科学与工程学院,湖南长沙410083) 摘要:针对城轨牵引无传感器内置式永磁同步电机的运行要求,设计了一种基于新型滑模观测器 的内置式永磁同步电机转速及转子位置观测器,通过电机电流的滑模观测模块对扩展反电动势进 行观测,使用S型函数取代传统的离散控制律,以削弱系统“抖振”;采用转速参数辨识和转子位置 角度的锁相环将转速与位置分开观测,以提高转速和转子位置的观测精度;采用变参数PI控制器 替代传统的内置式永磁同步电机速度控制环中恒参数PI控制器,以改善系统动态性能。证明了该 新型滑模观测器的控制系统的稳定性,开发了基于STM32F103嵌入式微控制器的滑模观测矢量控 制系统,实验结果验证了该控制策略的有效性与可行性。 关键词:城轨交通;内置式永磁同步电机;滑模观测器;锁相环;微控制器 中图分类号:TM351文献标志码:A文章编号:1007-449X(2012)07-0034-06 Detection of speed and rotor position of interior permanent magnet synchronous motor for urban rail traction SHENG Yi-fa1,2,LIU Sheng-xue1,YU Shou-yi2,GUI Wei-hua2 (1.School of Electrical Engineering,University of South China,Hengyang421001,China; 2.Institute of Information Science and Engineering,Central South University,Changsha410083,China) Abstract:To meet the operation requirements of sensorless interior permanent-magnet synchronous motor (IPMSM)for urban rail transit,a novel observer for IPMSM speed and rotor position detection based on sliding mode observer(SMO)was designed.The extended back electromotive force(EBEMF)was ob- served by the motor current module of SMO.Substitution of S function for traditional discrete control rate was used to reduce system jitter.The speed parameter identification and rotor position angle phase-locked loop(PLL)were adopted.The motor speed and rotor position information were obtained respectively to reduce the estimation error of speed and rotor position.Variable parameter PI controller was adopted to improve the dynamic performance.Stability of IPMSM control system based on the novel SMO was proved. Novel SMO vector control system was implemented using a STM32F103embedded microcontroller.The reliability and validity were verified by experimental results. Key words:urban rail transit;interior permanent magnet synchronous motor;sliding mode observer; phase-locked loop;microcontroller 收稿日期:2011-01-16 基金项目:国家自然科学重点基金(60634020);湖南省自然科学基金(10JJ6076);湖南省科技厅资助项目(2010GK3183);南华大学博士启动基金(2011XQD41) 作者简介:盛义发(1973—),男,博士,教授,硕士生导师,研究方向为电机及其系统、电力系统运行与控制、电力电子与电气传动; 刘升学(1963—),男,博士研究生,教授,硕士生导师,研究方向为机电一体化、系统经济运行与优化控制; 喻寿益(1940—),男,教授,博士生导师,研究方向为现代交流调速、自适应控制; 桂卫华(1950—),男,教授,博士生导师,研究方向为复杂系统建模与优化控制、现代交流调速。 通讯作者:盛义发 DOI:10.15938/j.emc.2012.07.010
BEN测速编码器在智能车舵机控制中的应用2.1 舵机工作原理 舵机在6 V电压下正常工作,而大赛组委会统一提供的标准电源输出电压为7.2 V,则需一个外围电压转换电路将电源电压转换为舵机的工作电压6 V。图2为舵机供电电路。 舵机由舵盘、位置反馈电位计、减速齿轮组、直流动电机和控制电路组成,内部位置反馈减速齿轮组由直流电动机驱动,其输出轴带动一个具有线性比例特性的位置反馈电位器作为位置检测。当电位器转角线性地转换为电压并反馈给控制电路时,控制电路将反馈信号与输入的控制脉冲信号相比较,产生纠正脉冲,控制并驱动直流电机正向或反向转动,使减速齿轮组输出的位置与期望值相符。从而达到舵机精确控制转向角度的目的。舵机工作原理框图如图3所示。 2.2 舵机的安装与调节 舵机的控制脉宽与转角在-45°~+45°范围内线性变化。对于对速度有一定要求的智能车,舵机的响应速度和舵机的转向传动比直接影响车模能否以最佳速度顺利通过弯道。车模在赛道上高速行驶,特别是对于前瞻性不够远的红外光电检测智能车,舵机的响应速度及其转向传动比将直接影响车模行驶的稳定性,因此必须细心调试,逐一解决。由于舵机从执行转动指令到响应输出需占用一定的时间,因而产生舵机实时控制的滞后。虽然车模在进入弯道时能够检测到黑色路线的偏转方向,但由于舵机的滞后性,使得车模在转弯过程中时常偏离跑道,且速度越快,偏离越远,极大限制车模在连续弯道上行驶的最大时速,使得车模全程赛道速度很难进一步提高。为了减小舵机响应时间,在遵守比赛规则不允许改造舵机结构的前提下,利用杠杆原理,采用加长舵机力臂的方案来弥补这一缺陷,加长舵机力臂示意图如图4所示。
基于高频电压注入法的永磁同步电机转子初始位置检测 Initial Rotor Position Inspection of PMSM Based on Rotating High Frequency Voltage Signal Injection 北京航空航天大学自动化科学与电气工程学院蔡名飞周元钧 摘要:为了解决新型无位置传感器永磁同步电机的起动问题,提出了一种在电机静止状态下检测转子位置的新方法。 该方法在算法上改进了传统的旋转高频电压注入法,使得可以更为快速、准确的检测出转子初始(均扫位置。并且针对传统旋转高频电压注人法无法检测出转子永磁体极性问题,在dq旋转坐标系下,通过分析永磁同步卜匕机d轴磁链和定子电流之间的关系,利用d轴电流的泰勒级数展开,提出J’根据定子铁芯非线性磁化特性获得判另}J N/S极极性信息的新方一案。最后,建立了系统仿真模型。仿真结果验证了这种方法的有效性和可行性。此方法同样适用于永磁同步电机在中、低速时的转子位置检测。 关键词:永磁同步电机转子初始位置旋转高频注人非线性磁化特性N/S极极性 1引言 永磁同步电机高精态、高动态性能的速度、位置控制,都需要准确的转子位置信息。如果位置检测误差较大,会导致电机不能正常起动、运行。传统方法是通过机械式传感器来测量转子的速度和位置。但机械式传感器减低了系统的可靠性,增加了系统的成本;同时传感器对环境有着严格的要求,电磁干扰、温度、湿度、振动对它的测量精度都有影响。特别针对某些航空伺服电机,长期工作在恶劣、复杂的环境中,所以研究无位置传感器不仅可 以减少航空电机成本,而且可以减少不必要的引线,将大大提高整个系统的可靠性〔‘]。 最简单的无位置传感器控制方法是文献「2]提出的基于对检测到的电机反电动势进行积分,这种方法虽然简单,但是在零速或低速阶段因为反电动太小,难以检测而失败。后来人们又提出了高频注人法,其主要思想是用电机固有的空间凸极或凸极效应可以实现对转子位置的检测,这种方法与转速没有直接关系,有效克服了反电动势法的 缺陷。文献〔3]提出通过处理电流高频响应,采取求导取极值计算电机的初始位置,但这种方法存在震荡现象,高频电流也会因滤波器移相导致检测误差,并且也没有给出电 机N/S极极性检测方法。文献【4]提出在电机中注人幅值相同、方向不同的系列脉冲,检测并比较相应电流的大小来估计转子的位置。这种方法可行但是对注入脉冲的电压幅 值和时间控制要求比较高,操作复杂,检测时间过长。文献[[5][6]通过注人高频信号引起PMSM的d,q轴磁链饱和程度差异实现初始位置检测,这种方法高频电流信号提取复 杂,容易带来计算误差,难以做到转子位置的实时检测跟踪。文献〔7l所使用的电机经过特殊设计,不具普遍性,仅适用于理论研究。 为了解决以上方法的存在的问题,本文提出了一种基于旋转高频电压注人法的永磁同步电机转子初始位置检测的新方法。在电机静止状态下,通过向电机定子三相绕组中注入高频电压信号,利用电机凸极效应,通过处理高频电流响应,得出转子的位置信号。为此,本文进行了仿真研究,实现了转子d轴位置和N/S极极性的快速、准确检测。 2高频激励下的永磁同步电机的数学模型
电机温度测量的具体操作方法 南洋防爆电机有限公司https://www.doczj.com/doc/449730929.html, 我们经常选用的电机温度测量方法主要有如下四种:①温度计法;②电阻法;③埋置检温计法;④粘贴测温纸法。这里所介绍的温度试验采用上述第一种方法,温度传感器为实验室较容易制作、价格低、校准方便的铜-康铜热电偶,该热点偶分度号为T型,测试温度范围在-200~400 ℃之间。它可把温度信号直接变成按一定规律变换的弱电压信号,通过一块或两块A/D转换卡,与PC机直接相连,使用专门配套温度测试软件,即可同时测试8点或16点不同位置的温度,并在微机显示器上直接显示所有测试点当前和历史记录的温度数值或温度曲线。该A/D转换卡为智能ISA总线,具有光耦隔离、抗干扰能力强、精度高 (±0.05%) 、可靠性高等特点。由于温度场和温度传感器的热惯性较大,因此,采集转换一组数据最小间隔设置为3 s即可满足大多数的测试要求,对于电机温度试验也是适用的。 电机在进行温度试验前,首先测取三相绕组在实际冷态下的直流电组,并记录当时电机绕组端部或铁芯的温度,可把此作为实际冷态下的绕组温度;再固定好电机及转矩转速传感器,接好电机电源线和各种电测试信号线,保证被试电机能正常运转和监控等;然后在电机机座外表面适当选取7个可能出现较高温度的位置,根据经验,这些测点位置一般在电机靠近吊环附近的圆周表面上,并且多出现在电
机驱动端,另外在电机驱动端的轴承外盖附近选取一个轴承可能出现较高温度的位置,分别在这8个测试点位置固定好已校正过的热电偶端部,热电偶埋入时应注意与被测点表面紧密接触,并用绝缘胶布或其他保护措施覆盖住热电偶前端的测温部分,以免受周围环境冷却气体的影响;最后把所有热电偶的测试线用一个"D"型2 5针标准插座连接,直接把该插座接到A/D转换接口板上即可,此时就可用温度测试软件测试电机表面温度了。
采用增量式光电编码器作为位置检测元件的PMSM伺服电机,必须要在系统刚上电时就测得电机精确的初始位置。因为在永磁伺服驱动系统中,电机转子的位置检测与初始定位是系统构成与运行的基本条件,也是矢量控制解耦的必要条件。只有永磁同步电机的转子位置能够准确知道,才可以按照矢量控制的一系列方程,将永磁同步电机等效变换成dq坐标系上的等效模型,系统才能按照类似他励直流电机的控制方法对永磁同步电机进行控制,从而可以达到他励直流电机构成的伺服传动系统的性能指标要求。使用增量式光电编码器测量电机位置的伺服系统中, 系统上电后需要先检测出电机的初始位置。电机的初始位置不仅影响伺服系统的定位精度, 而且会对电机的快速启动性能造成一定的影响。 在系统刚刚上电,电机尚未运行时,系统开始测量转子的初始位置,此过程只需要电流环工作,根据伺服系统运行要求,在寻找初始位置的过程中,只允许有很微小的抖动,并且要求很快回归原位。 假设,采用H45-8-2500-WL型光电编码器,电机转动过程中,编码器输出的信号:A(/A)、B(/B)、Z(/Z)、U(/U)、V(/V)和W(/W),如图1(b)所示。其中A(/A)、B(/B)两组信号为相差相位角的同频率信号,分辨率为2500PPR,通过判断两组脉冲的相位可以判断出电机的旋转方向,这两组信号经4倍频之后,电机空间位置的分辨率变为10000PPR。脉冲Z (/Z)是同步信号,电机每旋转一周产生一个信号,其产生的位置固定,即电机转子转到该位置时发出信号(零位信号)。 如图1所示为伺服电机混合式光电编码器的码盘结构及输出信号波形。码盘的中间码道为刻有高密度的增量式透光缝隙(2000,2500,3000PPR等),两边分布两组互成的三个缝隙,受光元件(Photo-Diode Array)接收到发光元件(LED)通过缝隙的光线而产生互差的三相信号,经过放大整形后输出矩形波信号U(/U)、V(/V)和W(/W)。利用这些信号的组合状态来分别代表磁极在空间的不同位置。U(/U)、V(/V)和W(/W)三相脉冲信号每转的脉冲个数与电机的极对数相一致。根据U(/U)、V(/V)和W (/W)三相脉冲的高低电平关系可以判断电机磁极的当前位置。其过程是:电机启动前,通过U(/U)、V(/V)和W(/W)三相脉冲的状态估算出电机磁极位置,即当前的角度,一旦电机旋转起来,光电编码器的增量式部分可以精确地检测出位置值。这里,伺服电机极对数为4对极,则每相输出信号U(/U)、V(/V)和W(/W)的周期为空间,在每个周期中可以组合成6种状态,每种状态代表空间角度范围为。
编码器是什么玩意呢,它可是一个好玩的东西,做小车测速必不可少的玩意,下面,我将从编码器的原理讲起,一直到用stm32的编码器接口模式,测出电机转速与方向。 1.编码器 图1 编码器示意图 图1为编码器的示意图,中间是一个带光栅的码盘,光通过光栅,接收管接收到高电平,没通过,接收到低电平。电机旋转一圈,码盘上有多少光栅,接受管就会接收多少个高电平。371电机中的码盘就是这样的,他是334线码盘,具有较高的测速精度,也就是电机转一圈输出334个脉冲,芯片上已集成了脉冲整形触发电路,输出的是矩形波,直接接单片机IO就OK。 增量式旋转编码器通过内部两个光敏接受管转化其角度码盘的时序和相位关系,得到其角度码盘角度位移量增加(正方向)或减少(负方向)。下图为编码器的原理图: 图2 增量式旋转编码器 A,B两点对应两个光敏接受管,A,B两点间距为 S2 ,码盘的光栅间距分别为S0和S1。S0+S1的距离是S2的四倍。这样保证了A,B波形相位相差90度。旋转的反向不同,锯齿波A,B先到达高电平的顺序就会不同,如上图左侧所示,顺序的不同,就可以得到旋转的方向。 2.stm32编码器接口模式(寄存器) stm32的编码器接口模式在STM32中文参考手册中有详细的说明,在手册273页,14.3.12节。程序是完全按照下图方式,设置寄存器的。 请到本文尾下载STM32中文参考手册
图3 从图3中可以看出,TI1波形先于TI2波形90°时,每遇到一个边沿变化是,计数器加1(可以通过寄存器设置加减),可以看出一个光栅,被计数了4次。TI1波形后于TI2波形90°时,每遇到一次边沿变化,计数器减1。 1.//TIM2_Encoder_Init,Tim2_CH1(PA0);Tim2_CH2(PA1) 2.//arr:自动重装值 0XFFFF 3.//psc:时钟预分频数,不分频 4.void TIM2_Encoder_Init(u16 arr,u16 psc) 5.{ 6. RCC->APB1ENR|=1<<0; //TIM2时钟使能 7.RCC->APB2ENR|=1<<2; //使能PORTA时钟 8. 9. GPIOA->CRL&=0XFFFFFF00; //PA0、PA1 清除之前设置 10. GPIOA->CRL|=0X00000044; //PA0、PA1 浮空输入 11. 12. TIM2->ARR=arr; //设定计数器自动重装值 13. TIM2->PSC=psc; //预分频器 14.
电机温度在线监测预警系统 应用范围:火灾温度报警/空调环境温度监测/工业温度监测/机房环境监控/科学试验温度测量/库房温度监测/酒店温度监测/烤箱温度监测/医药库房温湿度监测系统/养殖 场温度监测等系统 电机在长期高速运转的情况下会产生大量热量,引起主要部件的温度升高,出现电机烧毁现象,其中过热和振动是最常见的电机故障。其中轴承、绕组由于过热而导致电机烧毁的故障,要比振动故障多得多。振动故障比较直观,故障的恶化相对缓慢,直接或间接反映的故障有限。过热故障原因较多,表观性差,故障恶化较快。过热现象能够直接或间接反映的故障也是电机最多见和所占比例相当大的故障。因此,监测温度对于保证电机正常运行、分析故障原因尤为重要。由于大部分电机的特殊结构,传统的红外轴温监测系统无法检测到电机的温度。实时测量电机的温度,防止电机过热产生故障是我们设计监测预警系统的目标。 鉴于各种铂热电阻传感器的热响应时间相差较大,特别是螺纹式铂热电阻传感器的测温端处于测温孔的空气热室中,与测温孔壁、底部非直接接触,加上轴承套存在热阻,轴承运转产生的热量经过轴承外圈、轴承套、测温热室中的空气层,再传递到传感器的测温端,势必存在温度降。因此,测温数值与实际温度存在较大的时间差,导致报警、保护滞后和失控。综合上述传感器的缺点,我公司自行研制开发了PTMS-01系列无线温度在线监测预警系统(以下简称PTMS-01系统),有效的解决了电机内敏感点无法实时监测的难题。 1、PTMS-01系统工作原理 PTMS-01系统主要由无线温度传感器、无线测温通信终端、测温数据管理中心和管理工作站四部分组成。 其基本原理是:利用高精度接触式无线温度传感器“零距离”采集敏感点处的温度值,将温度值转换为无线信号发送至测温通信终端,再通过数据转换电路把无线信号再还原为数字温度信号,通过485输出端口把数据发送至数据管理中心。数据管理中心一般是有一台专用的服务器,通过专业的数据库形式,把各电机的温度信号集中采集和存储。 2、PTMS-01系统技术特点 (1)实时性:温度采集时间间隔可以按秒级设定,保证数据的记录、分析及时准确,为设备检修、生产调度等提供可靠依据。 (2)低功耗:采用高效锂电池供电,保证可靠运行5年以上。
电机温度与温升的概念理解及测量与 计算 https://www.doczj.com/doc/449730929.html,/ 2011年06月13日08:36 中国电机网 生意社2011年06月13日讯 电机的发热避免不了的想到了发热程度,涉及到电机发热程度的理论认识是:温升,温升限度、绝缘材料、绝缘结构,耐热等级等。因此,要认识和理解上面几个名词的含义,才能更好地注意和修正电机的 发热程序。 1.温升电机温升温升限度 (1)某一点的温度与参考(或基准)温度之差称温升。也可以称某一点温度与参考温度之差。 (2)什么叫电机温升。电机某部件与周围介质温度之差,称电机该部件的温升。 (3)什么叫电机的温升限度。电机在额定负载下长期运行达到热稳定状态时,电机各部件温升的允许极 限,称温升限度。电机温升限度,在国家标准GB755-65中作了明确规定,如附表所示。 在电机中一般都采用温升作为衡量电机发热标志,因为电机的功率是与一定温升相对应的。因此,只有确定了温升限度才能使电机的额定功率获得确切的意义。 2.绝缘材料绝缘结构耐热等级 (1)什么叫绝缘材料。用来使器件在电气上绝缘的材料称绝缘材料。 (2)什么叫绝缘结构。一种或几种绝缘材料的组合称绝缘结构。 (3)什么叫耐热等级。表示绝缘结构的最高允许工作温度,并在这样的温度下它能在预定的使用期内维持其性能,在允许的范围内及其所分的等级耐热等级。耐热等级分为Y级90℃、A级10℃、E级120℃、B级130℃、F级155℃、H级180℃和H级以上共七个等级。 从上所述,电机中不同耐热等级的绝缘材料有着不同的最高允许工作温度。所谓最高允许工作温度是指:在此温度下长期使用时,绝缘材料的物理、机械、化学和电气性能不发生显著恶性变化,如超过此温度,则绝缘材料的性能发生质变,或引起快速老化。因此,绝缘材料最高允许工作温度是根据它经济使用寿命确定的。从附表中可以看到,温升限度基本上取决于绝缘材料的等级,但也和温度的测量方法、被测部的传热和散热条件有关,取决于绝缘材料的最高允许工作温度。当周围冷却介质(例如空气)的最高温度确定后,就可根据绝缘材料的最高允许工作温度规定电机部件的温升限度。根据统计我国各地的绝对最高温度一般在35~40℃之间,因此在标准中规定40℃作为冷却介质的最高标准。
飞思卡尔智能车舵机和测速的控制设计与实现 时间:2010-04-1411:53:10来源:电子设计工程作者:雷贞勇谢光骥五邑大学 2.1舵机工作原理 舵机在6V电压下正常工作,而大赛组委会统一提供的标准电源输出电压为7.2V,则需一个外围电压转换电路将电源电压转换为舵机的工作电压6V。图2为舵机供电电路。 舵机由舵盘、位置反馈电位计、减速齿轮组、直流动电机和控制电路组成,内部位置反馈减速齿轮组由直流电动机驱动,其输出轴带动一个具有线性比例特性的位置反馈电位器作为位置检测。当电位器转角线性地转换为电压并反馈给控制电路时,控制电路将反馈信号与输入的控制脉冲信号相比较,产生纠正脉冲,控制并驱动直流电机正向或反向转动,使减速齿轮组输出的位置与期望值相符。从而达到舵机精确控制转向角度的目的。舵机工作原理框图如图3所示。 2.2舵机的安装与调节 舵机的控制脉宽与转角在-45°~+45°范围内线性变化。对于对速度有一定要求的智能车,舵机的响应速度和舵机的转向传动比直接影响车模能否以最佳速度顺利通过弯道。车模在赛道上高速行驶,特别是对于前瞻性不够远的红外光电检测智能车,舵机的响应速度及其转向传动比将直接影响车模行驶的稳定性,因此必须细心调试,逐一解决。由于舵机从执行转动指令到响应输出需占用一定的时间,因而产生舵机实时控制的滞后。虽然车模在进入弯道时能够检测到黑色路线的偏转方向,但由于舵机的滞后性,使得车模在转弯过程中时常偏离跑道,且速度越快,偏离越远,极大限制车模在连续弯道上行驶的最大时速,使得车模全程赛道速度很难进一步提高。为了减小舵机响应时间,在遵守比赛规则不允许改造舵机结构的前提下,利用杠杆原理,采用加长舵机力臂的方案来弥补这一缺陷,加长舵机力臂示意图如图4所示。
问过很多人了,大家都知道这个东西不能私自乱碰,但是问题是:它还是被我莽撞地宽衣解带了,已近不是原装处子的西门子伺服电机,装上伺服驱动器就耍泼,从地面跳起老高。一个劲的扑腾,特来此请教坛子里的高手,到底如何从新安装伺服电机的编码器,如何检测编码器的位置,如何调整,需要的设备等。 问题起由:伺服电机与减速齿轮箱直连垂直安装,最近天气温度高,齿轮箱油封故障,齿轮油经由轴渗漏入下方的伺服电机,再从伺服电机电缆接口漏出来了,但是电机各项参数正常,电流,速度,力矩,温度均正常。因为对伺服的不了解,我们担心这些漏油会降低伺服电机的寿命,故决定拆开电机清洁,不小心连编码器也拆了,清洁电机后,原样装回,伺服驱动器上电就转,而且转速不均匀,空载静置地面的电机固定频率地相一个方向抖动,如果不用手按住,就会跳离地面! 问题分析:查看电机的结构后,发现该三相交流永磁转子电机,定子类似于普通交流电机,转子为永磁体,转子长筒型,中有轴向孔洞,后轴端有一测速发电机形式的编码器,外圈三相六线的,就是有三组绕组类似一般的交流电机的定子,但是后部有两相集电环导流到内圈绕组,内圈也有一绕组,两相,估计是励磁用的。 这样一个结构的伺服电机拆开后竟然就完全不能原装装回去了,怎么装都不能正常运行了,电机抖的厉害,西门子SIMODRIVE 611驱动器有时有501,509,605等报警,一般都是501,报警内容为转子位置检测过电流120%。 处理过程:经过请教西门子的一些工程师和一些朋友,都反应是编码器安装位置不对引起的,同时特意叮嘱不能随便拆编码器和转子的相对位置,但是都无法提供正确的编码器从新安装的方法,所以特来求教,希望有过这方面经验,知识,的高手指点一二,多谢了! 解决办法:1 该电机在旋转变压器旋转部分有条随意画的线条,不知道该对那里,没有明显的对应标记,但是我松掉变压器螺钉后,运转电机,慢慢手动旋转变压器也找到了比较好的运转位置,现在那个电机恢复了青春,在设备上无怨无悔地工作了 2 将编码器的尾盖打开,固定编码器的连接片的位置要做个记号先将里面的 M5螺丝拆下,然后用一个长一点的全螺纹M6的螺丝旋进去便可将编码器顶出来。编码器的尾盖拆开后里面圆孔的边缘有个刻线。电机的尾部也有条刻线(与编码器连接的部分),记好两刻线的位置 3这电机应是无刷电机了,所以编码器检测换向位置UVW,故不能随意安装了,现场调节一般手一边调节编码器,一边看电机电流,让其在最小则是最佳位置,但往往由于手的抖动或其他原因,不会在位置最佳,电机不能满负荷或高速运行,正规的如下: 1.波形观察法 适用于带换相信号的增量式编码器、正余弦编码、旋转变压器。 1) 以示波器直接观察UV线反电势波形过零点与传感器的U相信号上升沿/Z信号、或Sin信号过零点、或Sin包络信号过零点的相位对齐关系,以此方法可以将传感器的上述信号边沿或过零点对齐到-30度电角度相位; 2) 以阻值范围适当的三个等值电阻构成星形,接入永磁伺服电机的UVW动力线,以示波器观察U相动力线与星形等值电阻的中心点之间的虚拟U相反电势波形与