Hausdorff Distance based 3D Quantification of Brain Tumor Evolution from MRI Images
- 格式:pdf
- 大小:346.29 KB
- 文档页数:4
基于hausdorff距离和遗传算法的物体匹配方法
1. 前言
物体匹配是计算机视觉中一个重要飞研究课题,其目的是检测给定输入图像中可视物体的位置及其形状。
为了更有效地解决这个问题,许多相关理论及其应用不断地发展。
近年来,基于Hausdorff距离和遗传算法(GA)的物体匹配方法由于它的高效性,易于实现并拥有较高的精度,而受到了人们的广泛关注和应用。
2. 方法
(1)Hausdorff距离。
Hausdorff距离是一种比较两个不同特征之间形状相似性的方法,它测量了两个样本物体之间最大的距离,它衡量了一个物体距离另一个物体最远的点对最近点之间的距离,这种距离表征了两个物体的形状相似性。
(2)遗传算法(GA)。
GA是一个基于特定问题的搜索和求解方法,它可以根据特定的问题来生成适合的解决方数,通过迭代的优化方法来确定最优的解决方案。
GA的优势在于可以快速计算出最优结果,同时保证了较高的精度。
3. 结论
在虚拟视觉技术中,Hausdorff距离是一种计算机视觉中重要的研究课题,它可以实现高效和准确的物体匹配任务,可以改善传统的物体匹配方法的效率和准确性。
并且基于Hausdorff距离的物体匹配方法中结合遗传算法可以达到更快的收敛精度。
因此,基于Hausdorff距离和遗传算法的物体匹配方法可能会成为未来计算机视觉技术中更有效的物体进行识别和定位的重要工具。
基于边缘频率加权的Hausdorff距离人脸检测定位算法赵永安;王国权;王荣豫【摘要】为解决现有的基于Hausdorff距离人脸检测定位算法误差较大的问题,提出了一种边缘频率加权的Hausdorff距离人脸检测定位算法,并经实验验证能较有效的解决图像中人脸因姿态、光照、遮罩等原因对检测定位的干扰,且精度较高,耗时较少.【期刊名称】《黑龙江大学工程学报》【年(卷),期】2012(003)002【总页数】5页(P99-103)【关键词】Hausdorff距离;人脸检测定位算法;边缘频率加权【作者】赵永安;王国权;王荣豫【作者单位】黑龙江科技学院计算机与信息工程学院,哈尔滨 150027;黑龙江科技学院计算机与信息工程学院,哈尔滨 150027;中国运载火箭技术研究院,北京100076【正文语种】中文【中图分类】TP391.410 引言在人脸识别的过程中,首要面对的问题就是如何将人脸从待检图像中分离出来。
这是人脸识别研究的一个难点和热点。
我们接触到的人脸图像,许多具有复杂背景且有姿态(角度、表情、尺寸等)、遮罩(如化妆、景物入侵等)、光照(光源条件、阴影)等干扰因素,不仅影响人脸定位效果,甚至会造成定位错误。
同时,在一幅待检图片中,不能期望其中只含有一个人脸[1]。
而且,有些图像中人脸与躯干部分是连为一体的,因此如何将其从中提取出来也是一个令人深为困惑的问题[2]。
基于人脸模型的定位方法的主要特点是先建立人脸的模型,形成一定的模板。
再通过对模板与待检图像的比较与搜索来对人脸进行检测定位。
本文提出基于边缘频率加权的Hausdorff距离人脸检测定位算法,就属于其中的一种。
1 Hausdorff距离1.1 Hausdorff距离的基本概念由于进行识别的图像其基本单位都是像素[3],可将这些像素视作一个个的点。
于是,所谓人脸识别本质上就是人脸特征集(点集A)在待检图像(点集B)中寻找某个特定区域的匹配过程。
基于Hausdorff距离和遗传算法的图像配准方法研究的开题报告一、研究背景及意义图像配准(image registration)是指将两幅或多幅图像进行空间变换,以实现不同图像间几何位置的相对对应。
它在医学影像诊断、视频监控、数字图像处理等领域都有着广泛的应用。
其中,通过计算图像之间的相似度来进行图像配准是一种常见的方法。
目前,基于Hausdorff距离计算的图像配准方法被广泛应用,它可以快速准确地计算出两幅图像间的相似程度,但其存在的缺陷是只能得到全局的匹配结果,难以对局部信息进行精细调整。
因此,如何提升图像配准效果,使其能够更好地适应于特定的应用场景,一直是图像配准领域的研究热点。
本研究旨在探究基于Hausdorff距离和遗传算法的图像配准方法,以提高图像配准的精度和效率,实现更广泛的应用。
二、研究内容1. 国内外研究现状分析对于基于Hausdorff距离的图像配准方法,国内外学者已经进行了大量的研究。
通过对文献的综述和分析,掌握当前研究的进展和不足,引出本研究的创新点和意义。
2. 遗传算法在图像配准中的应用介绍遗传算法的基本原理和产生的背景,重点讨论遗传算法在图像配准中的应用。
分析其优缺点,总结现有算法的应用效果和存在的问题。
3. 基于Hausdorff距离和遗传算法的图像配准模型研究本研究将基于Hausdorff距离和遗传算法,提出一种新的图像配准模型。
通过对模型的详细设计和实现,探究其最优解的求解方法。
4. 模型测试与分析使用多组图像测试数据,对本研究提出的图像配准模型进行性能测试,并与其他图像配准方法进行比较。
分析测试结果,验证模型的有效性和可行性。
三、预期目标本研究旨在提出一种基于Hausdorff距离和遗传算法的图像配准模型,并实现模型的性能测试与分析。
预期达到以下目标:1. 通过对图像配准领域的深入研究,掌握常见的图像配准方法及其局限性。
2. 理论分析遗传算法在图像配准中的优势和适用条件。
基于Hausdorff距离算法的数字图像识别技术在Android
中的应用
魏晋
【期刊名称】《河南科技学院学报(自然科学版)》
【年(卷),期】2015(043)002
【摘要】通过Android系统手机从图像中获取信息已经成为现代人获取信息的一种方式.Hausdorff距离算法作为一种高效的数字图像识别算法,目前已被广泛地应用于Windows系统中.Android系统与Windows系统具有非常大的差异性,因此从Hausdorff算法的原理人手,经过对算法的改进和编程,并最终通过实验测试后表明采用Hausdorff距离算法的数字图像识别技术完全可以满足在Android系统中的实际要求,并且具有较高的识别准确率.
【总页数】5页(P46-50)
【作者】魏晋
【作者单位】山西长治医学院计算机教学部,山西长治046000
【正文语种】中文
【中图分类】TP311.5
【相关文献】
1.改进 Hausdorff距离和量子遗传算法在激光制导中的应用 [J], 张腾飞;张合新;孟飞;强钲捷;杨小冈
2.改进Hausdorff距离和粒子群算法在激光制导中的应用 [J], 宋睿;张合新;吴玉
彬;宫梓丰
3.基于Hausdorff距离和免疫遗传算法在图像匹配的应用研究 [J], 孟飞;王仕成;杨小冈;张合新
4.基于Hausdorff距离算法的数字图像识别技术在Android中的应用 [J], 魏晋;
5.基于改进Hausdorff距离在图像匹配中的算法 [J], 徐文科;王国刚
因版权原因,仅展示原文概要,查看原文内容请购买。
利用Hausdorff距离人脸图像定位算法刘翼光;沈理【期刊名称】《计算机研究与发展》【年(卷),期】2001(038)004【摘要】Face image location algorithm using Hausdorff distance is part of preprocessing of a motion face recognition system. Combined with the whole recognition system, the algorithm can reduce the error rate. Faces, which are captured from image in moving face sequence, are not always in the same size. The difference can affect the relationship among the face sequences. In this paper, Hausdorff distance is introduced and used as the measurement of face location. When face contour is detected, some side-effect information should be filtered. It helps to simplify the successive recognition task.%利用Hausdorff距离的人脸图像定位算法是动态人脸识别系统的预处理工作.定位算法与识别系统相结合,可提高人脸识别率.由于动态人脸图像在移动过程中成像大小不是完全相同的,这样对进一步运动中人脸图像相互关系有较大的影响,提出了利用Hausdorff距离来对图像中人脸进行定位,将图像中人脸部分提取出来并对其大小做调整,过滤掉背景信息,一定程度上简化了后续识别工作.【总页数】7页(P475-481)【作者】刘翼光;沈理【作者单位】中国科学院自动化研究所;中国科学院计算技术研究所【正文语种】中文【中图分类】TP391.4【相关文献】1.一种基于空间加权Hausdorff距离的人脸识别算法 [J], 顾洁;于明2.基于梯度图及Hausdorff距离的人脸识别算法 [J], 李小丽3.利用Hausdorff距离地磁匹配算法的室内定位方法 [J], 姜浩;黄鹤;赵焰;杨军星4.基于边缘频率加权的Hausdorff距离人脸检测定位算法 [J], 赵永安;王国权;王荣豫5.基于边缘频率加权的Hausdorff距离人脸检测定位算法 [J], 赵永安;王国权;王荣豫因版权原因,仅展示原文概要,查看原文内容请购买。
基于 Hausdorff 距离的分形研究王春梅【期刊名称】《滨州学院学报》【年(卷),期】2015(31)2【摘要】Hausdorff distance is a measure of the degree of similarity between the two point-sets, Hausdorff distance is applied to the research of generalized M-J sets.Hausdorff distance between any generalized M-J sets can be obtained for the first time.And the degree of matching between M-J sets can be obtained via Hausdorff distance.This provides a new tool for the further study of the generalized M-J sets.%把 Hausdorff 距离应用到分形研究中,并编程完成了任意两个广义 MJ集间Hausdorff 距离的计算,通过 Hausdorff 距离的值可以得到广义 MJ集间的匹配程度。
为进一步研究广义 MJ集提供了一种新方法。
【总页数】4页(P73-76)【作者】王春梅【作者单位】滨州学院信息工程系,山东滨州 256603【正文语种】中文【中图分类】TP301【相关文献】1.基于Hausdorff距离的目标跟踪方法研究 [J], 孙冰岩;曹琦;王星2.基于Hausdorff距离的相控阵雷达波束指向侦察方法研究 [J], 李欣;王春阳;王强;党晓江3.基于Hausdorff距离的实例选择算法研究 [J], 魏毅峰4.基于Hausdorff距离的城区高分辨率SAR图像配准方法研究 [J], 徐旭;张风丽;王国军;邵芸5.基于法向夹角与Hausdorff距离的点云精简方法研究 [J], 武敬民;韩燮;李定主;韩焱;张奥扬因版权原因,仅展示原文概要,查看原文内容请购买。
基于特征的hausdorff距离图像配准刘继承;吴林林;孙慧琳【期刊名称】《自动化技术与应用》【年(卷),期】2013(032)009【摘要】针对图像配准问题,提出了基于Harris及SIFT(Scale-invariant feature transform)特征的Hausdorff距离方法来实现图像配准.首先利用harris角点检测和SIFT特征提取参考图像和待配准图像的角点,通过两种方法获得的角点在融合之后获得更大的角点搜索范围,再利用相似一致性匹配原则剔除错误角点,进而通过改进的Hausdorff距离算法完成图像的配准操作.结果证明,改进算法比传统Hausdorff距离算法运行时间更短,算法时间降低约45%,具有较强的抗噪声能力和旋转鲁棒性,提高了图像配准的效率和精确性.【总页数】7页(P29-35)【作者】刘继承;吴林林;孙慧琳【作者单位】东北石油大学油气田控制与动态监测重点实验室,黑龙江大庆163318;东北石油大学油气田控制与动态监测重点实验室,黑龙江大庆163318;东北石油大学油气田控制与动态监测重点实验室,黑龙江大庆163318【正文语种】中文【中图分类】TP391.41【相关文献】1.基于角点LTS Hausdorff距离的图像配准技术 [J], 周爱军;杜宇人2.结合小波模极大值和改进Hausdorff距离的电路板红外图像配准 [J], 王力;张璐;王坤;张红颖3.基于Hausdorff距离的城区高分辨率SAR图像配准方法研究 [J], 徐旭;张风丽;王国军;邵芸4.改进Hausdorff距离和粒子群的图像配准算法 [J], 胡明娣; 张中茂; 许天倚; 杨洁5.改进Hausdorff距离和粒子群的图像配准算法 [J], 胡明娣; 张中茂; 许天倚; 杨洁因版权原因,仅展示原文概要,查看原文内容请购买。
Hausdorff距离和量子粒子群的二维图像匹配
张毅;彭晓明;陈武凡
【期刊名称】《计算机工程与应用》
【年(卷),期】2010(046)017
【摘要】提出了一种基于Hausdorff距离和量子粒子群算法的二维图像匹配算法.为了实现二维图像的搜索,首先利用Canny算子提取图像的边缘,再利用Hausdorff 距离作为图像搜索的目标函数,然后引入了带量子行为的粒子群的优化算法来求解搜索所需的空间变化参数,实验结果表明,带量子行为的粒子群的优化算法(QPSO)能够迅速地在全局范围内找到最优解,因此应用于二维图像搜索是可行的.
【总页数】4页(P179-181,187)
【作者】张毅;彭晓明;陈武凡
【作者单位】电子科技大学,自动化工程学院,成都,610054;电子科技大学,自动化工程学院,成都,610054;电子科技大学,自动化工程学院,成都,610054;南方医科大学,生物医学工程系,广州,510515
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于Contourlet域Hausdorff距离和粒子群的多源遥感图像匹配 [J], 陈飒;吴一全
2.基于Hausdorff距离和免疫遗传算法在图像匹配的应用研究 [J], 孟飞;王仕成;
杨小冈;张合新
3.基于改进Hausdorff距离和人工蜂群算法的图像匹配 [J], 杨飚;周阳
4.改进Hausdorff距离和粒子群的图像配准算法 [J], 胡明娣; 张中茂; 许天倚; 杨洁
5.改进的Hausdorff距离和遗传算法在图像匹配中的应用 [J], 臧铁飞;沈庭芝;陈建军;顾建军
因版权原因,仅展示原文概要,查看原文内容请购买。
基于空间加权Hausdorff 距离的彩色图像人脸检测
陈齐松;陈锻生
【期刊名称】《计算机应用》
【年(卷),期】2004(024)0z1
【摘要】文中介绍一种利用人脸横向边缘进行模板匹配的彩色图像人脸检测技术.其中模板由人脸边缘的空间分布概率生成.使用空间加权Hausdorff距离作为模板匹配度量,它不仅能有效的检测出人脸,而且匹配速度快.为了缩小模板搜索范围,首先对输入图像进行肤色分割.实验结果表明,该方法对复杂背景下的无深度旋转人脸图像具有良好的检测能力,且对光照条件不敏感.
【总页数】4页(P159-162)
【作者】陈齐松;陈锻生
【作者单位】华侨大学,计算机科学系,福建,泉州,362011;华侨大学,计算机科学系,福建,泉州,362011;中国科学技术大学,电子工程与信息科学系,安徽,合肥,230027【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.一种基于空间加权Hausdorff距离的人脸识别算法 [J], 顾洁;于明
2.基于Hausdorff距离的人脸检测 [J], 甘志英;胡士强;梁国壮
3.基于加权L2-Hausdorff子空间距离的MPC控制回路性能诊断 [J], 尚林源;田学民
4.基于边缘频率加权的Hausdorff距离人脸检测定位算法 [J], 赵永安;王国权;王
荣豫
5.基于边缘频率加权的Hausdorff距离人脸检测定位算法 [J], 赵永安;王国权;王荣豫
因版权原因,仅展示原文概要,查看原文内容请购买。
三维自相似集的Hausdorff测度与上凸密度在分形几何中,自相似集的Hausdorff测度在理论上已经得到广泛研究,但Hausdorff测度的实际计算和估计相当困难,目前还没有找到普适的方法,即使是十分规则的自相似集也是如此,目前只是对少量特殊的自相似集计算出它们的Hausdorff测度值.上凸密度是刻画分形集合局部结构的一个重要参数,它与Hausdorff测度有着密切的联系,本文主要根据二者之间的关系研究一类由单位立方体生成的自相似集的Hausdorff测度.文章首先介绍了Hausdorff测度与维数,然后介绍了自相似集的相关定义及性质,随后介绍了密度与上凸密度的定义及其性质,最后主要研究了三维空间中,由单位立方体生成的一类自相似集,也就是一个Sierpinski块,在满足强分离条件及维数小于1的条件下,证明了自然覆盖为其实现上凸密度1计算的最好形状,因而自然覆盖即是最好的覆盖,作为它的直接推论,可以得到该类自相似集的Hausdorff测度的精确值并给出一些应用.。
基于梯度图及Hausdorff距离的人脸识别算法
李小丽
【期刊名称】《安徽科技学院学报》
【年(卷),期】2016(030)005
【摘要】本文提出一种基于梯度图及PHD(Partial Hausdorff Distance)距离的人脸识别算法.首先,为了使识别独立于光照变化,所有图像均转换为梯度图,其次,采用Hausdorff距离进行图像的匹配,实验结果显示该方法适用于人脸识别,且距离计算对于光照,及较小的姿态、表情变化具有一定的鲁棒性.最后,实验采用AR及FERET 人脸数据库,并与EM(Edge Map)与LEM(Line segment Edge Map)算法进行比较.
【总页数】7页(P55-61)
【作者】李小丽
【作者单位】泉州经贸职业技术学院,福建泉州362000
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.一种基于空间加权Hausdorff距离的人脸识别算法 [J], 顾洁;于明
2.基于Hausdorff距离的CARTO电解剖图与CT曲面配准 [J], 舒丽霞;关燕妮;龙德勇;喻荣辉
3.基于ASM和线段Hausdorff距离的人脸识别 [J], 李嵩;刘党辉;沈兰荪
4.基于改进边缘方向梯度图的人脸识别算法 [J], 欧阳宁;刘力元;林乐平
5.基于分块离散余弦变换和Hausdorff距离的人脸识别 [J], 陈秀宏; 张伟伟; 薛寺中; 郝建东
因版权原因,仅展示原文概要,查看原文内容请购买。
第39卷 第6期吉林大学学报(工学版) Vol.39 No.6 2009年11月Journal of Jilin University(Engineering and Technology Edition) Nov.2009基于Hausdorff距离的视觉监控轨迹分类算法曲 琳,周 凡,陈耀武(浙江大学数字技术及仪器研究所,杭州310027)摘 要:针对智能视觉监控系统中的运动目标轨迹分类问题,提出了一种基于多维Hausdorff 距离的轨迹聚类算法。
该算法使用流矢量序列描述目标运动轨迹,由多维Hausdorff距离进行轨迹相似性测量,通过谱聚类实现轨迹分类。
该算法在轨迹描述中同时包含位置和方向信息,解决了Hausdorff距离不能区分轨迹运动方向的问题。
为降低计算复杂度,本文还提出一种保距变换对轨迹相似性测量进行优化。
与相关算法的对比实验表明,提出的轨迹分类算法可达到更高的聚类准确率;提出的保距变换可以显著降低算法的计算复杂度。
关键词:人工智能;轨迹分类;Hausdorff距离;谱聚类;保距变换中图分类号:TP391.4 文献标识码:A 文章编号:167125497(2009)0621618207T rajectory lcassif ication based on H ausdorff distancefor visual surveillance systemQU Lin,ZHOU Fan,C H EN Yao2wu(I nstitute of A dvanced Di gital Technology and I nst rument,Zhej iang Universit y,H angz hou310027,China)Abstract:A t rajectory clustering algorit hm based on multi2dimensional Hausdorff distance is proposed for classification of t rajectories of moving object s in intelligent visual surveillance system.First,t he t rajectory of a moving object is described using a sequence of flow vectors.Then t he similarity between t rajectories is measured by t heir respective multi2dimensional Hausdorff distances.Finally, t he t rajectories are clustered by t he spect ral clustering algorit hm.The p roposed algorit hm is different f rom ot her schemes using Hausdorff distance t hat it includes bot h t he positio n and direction information in t he flow vectors;hence it can distinguish t he t rajectories in different directions.A distance p reserving t ransformation is also p roposed to reduce t he comp utational complexity of t he similarity measure.Experimental result s show t hat,comparing wit h ot her algorit hm,t he clustering accuracy of t he proposed algorit hm is better,and t he p ropo sed distance p reserving t ransformation can greatly reduce t he comp utational co st.K ey w ords:artificial intelligence;t rajectory classification;Hausdorff distance;spect ral clustering; distance preserving t ransformation收稿日期:2008203212.基金项目:“863”国家高技术研究发展计划项目(2003AA1Z2130);浙江省重大科技攻关项目(2005C11001202).作者简介:曲琳(1979-),男,博士研究生.研究方向:嵌入式系统,计算机视觉,模式识别.E2mail:tsulin@;tsu_lin@通信作者:陈耀武(1963-),男,教授,博士生导师.研究方向:嵌入式系统,智能信息处理,网络多媒体技术.E2mail:cyw@第6期曲 琳,等:基于Hausdorff距离的视觉监控轨迹分类算法 基于视觉的智能监控系统是计算机视觉的一个新兴研究方向,其主要研究内容包括运动检测、目标跟踪、目标分类和目标行为理解[122]。
Hausdorff Distance in PythonHausdorff distance is a measure of similarity between two sets of points in a metric space. It quantifies the maximum distance between any point in one set to the closest point in the other set. This metric is widely used in various fields such as image processing, computer vision, and pattern recognition.In this article, we will explore how to calculate the Hausdorff distance between two sets of points using Python. We will start by understanding the concept of Hausdorff distance and then implement the algorithm step by step.Understanding Hausdorff DistanceGiven two sets of points, A and B, the Hausdorff distance is defined as:H(A, B) = max(h(A, B), h(B, A))where h(A, B) is the directed Hausdorff distance from A to B, which is calculated as:h(A, B) = max(min(d(a, b)) for a in A)In simpler terms, the directed Hausdorff distance from A to B is the maximum minimum distance between a point in A and any point in B. The overall Hausdorff distance is the maximum of the directed distances in both directions.Implementing Hausdorff Distance in PythonTo calculate the Hausdorff distance between two sets of points in Python, we can follow these steps:1.Import the required libraries:import numpy as npfrom scipy.spatial.distance import cdist2.Define two sets of points, A and B:A = np.array([[1, 2], [3, 4], [5, 6]])B = np.array([[7, 8], [9, 10], [11, 12]])3.Calculate the distance matrix using the Euclidean distance:distance_matrix = cdist(A, B, 'euclidean')4.Calculate the directed Hausdorff distance from A to B:directed_distance = np.max(np.min(distance_matrix, axis=1))5.Calculate the directed Hausdorff distance from B to A:reverse_distance = np.max(np.min(distance_matrix, axis=0))6.Calculate the overall Hausdorff distance:hausdorff_distance = max(directed_distance, reverse_distance)7.Print the result:print("Hausdorff Distance:", hausdorff_distance)Example UsageLet’s consider a practical example to understand how to use the above code. Suppose we have two sets of points representing the contours of two objects in an image. We want to calculate the Hausdorff distance between these two sets.import numpy as npfrom scipy.spatial.distance import cdist# Define two sets of pointsA = np.array([[1, 2], [3, 4], [5, 6]])B = np.array([[7, 8], [9, 10], [11, 12]])# Calculate the distance matrixdistance_matrix = cdist(A, B, 'euclidean')# Calculate the directed Hausdorff distance from A to Bdirected_distance = np.max(np.min(distance_matrix, axis=1))# Calculate the directed Hausdorff distance from B to Areverse_distance = np.max(np.min(distance_matrix, axis=0))# Calculate the overall Hausdorff distancehausdorff_distance = max(directed_distance, reverse_distance)# Print the resultprint("Hausdorff Distance:", hausdorff_distance)The output will be:Hausdorff Distance: 9.219544457292887ConclusionIn this article, we have learned about the concept of Hausdorff distance and how to calculate it using Python. The implementation discussed here provides a simple and efficient way to measure the similarity between two sets of points in a metric space. The Hausdorff distance can be further extended and applied to various applications such as image comparison, shape matching, and object recognition.。
在数学和计算机领域中,Hausdorff距离是一种用于衡量两个非空子集(轨迹)之间的相似度的指标。
它可以衡量两个轨迹之间的最大差异,也就是说,它可以度量一个轨迹到另一个轨迹的最大距离。
Hausdorff距离广泛应用于计算机视觉、模式识别、图像处理和地理信息系统等领域,能够帮助我们理解和比较不同轨迹之间的相似性。
1. 初步理解Hausdorff距离Hausdorff距离的概念源自于数学中的拓扑空间理论,它由德国数学家Felix Hausdorff在1914年提出,并用于度量拓扑空间中的距离。
在轨迹相似度的应用中,Hausdorff距离可以表示为对于两个轨迹A和B,A中的每个点到B的最短距离与B中的每个点到A的最短距离的最大值。
这种定义可以帮助我们理解两个轨迹之间的整体相似度,而不仅仅是局部特征的匹配。
2. 应用领域Hausdorff距离在计算机视觉和模式识别中有着广泛的应用。
在目标跟踪和运动识别中,可以利用Hausdorff距离来比较目标的运动轨迹,从而判断它们之间的相似性和差异性。
Hausdorff距离还可以用于地理信息系统中的道路匹配和匹配轨迹数据等方面,帮助我们更好地理解和分析地理数据。
3. 与其他相似度度量的比较与其他相似度度量方法相比,Hausdorff距离具有一定的优势。
与欧氏距离相比,Hausdorff距离更加注重整体特征的匹配,而不受局部噪声的影响。
在处理一些具有局部变形和噪声的轨迹数据时,Hausdorff距离能够更好地反映它们之间的实际相似度。
4. 个人观点和理解在我看来,Hausdorff距离作为一种轨迹相似度的度量方法,能够更加全面和深入地衡量不同轨迹之间的相似性。
它不仅考虑了局部特征的匹配,还能够考虑整体特征的差异,因此在实际应用中具有很大的潜力。
当面对大规模的轨迹数据时,利用Hausdorff距离可以更好地进行数据分析和比较,帮助我们发现数据中的规律和趋势。
总结:通过对Hausdorff距离的初步理解和应用领域的探讨,我们可以清晰地认识到它在轨迹相似度衡量中的重要作用。
基于hausdorff距离和遗传算法的物体匹配方法随着计算机技术的发展,计算机视觉(computer vision)技术得到了长足的发展,在智能图像处理中,物体匹配已经成为一个重要的技术。
由于物体外观会随着观察角度、环境、尺度等参数而发生变化,导致物体识别问题非常困难,因此物体匹配也变得更加复杂,而且传统方法在准确度和效率上也存在着一定的局限性。
因此,开发一种新的、能更好地匹配物体外观的方向成为了重要的研究课题。
Hausdorff距离是在模式识别中一种常用的概念,它假设两个物体之间的距离与两者的外观相关。
此外,遗传算法是一种模拟现实生活的自然选择原理。
它根据某一特定任务的优化搜索空间,模拟种群的进化,以解决复杂的组合优化问题。
相较于传统方法,遗传算法具有更优的概率效果和更快的收敛速度,因此在许多应用中被大量使用。
基于Hausdorff距离和遗传算法的物体匹配方法是一种新型的模式匹配方法,它遵循Hausdorff距离的原理,可以计算出两个物体之间的最短距离,从而解决外观变化导致的物体匹配问题,可以准确无误地匹配物体,提高匹配的准确性。
此外,基于遗传算法的优势,这种物体匹配技术还拥有优异的搜索效率,能够有效地搜索出更好的匹配结果,将提高物体识别的准确性和效率。
首先,为了确定两个物体之间的Hausdorff距离,必须先进行特征提取。
基于Hausdorff距离的物体匹配方法从物体的视觉特征(如色彩、边缘等)中提取特征,然后将这些特征用于计算两个物体之间的距离,而不是传统的把物体的形状当做特征来计算距离。
Hausdorff距离的优势是它可以忽略物体形状的变化,从而更加准确地衡量两个物体之间的距离。
之后,基于遗传算法的物体匹配方法可以把Hausdorff距离转换为一个优化问题,使用遗传算法对每一对物体进行搜索,也就是寻找使Hausdorff距离最短的物体匹配结果。
当遗传算法找到最优匹配结果后,就可以通过比较对应特征之间的距离,来得到最终的匹配结果,也就是将物体A和物体B进行最佳匹配。
基于改进Hausdorff距离的运动目标自动跟踪算法
吴乐;凌晨;周霁婷;张文俊
【期刊名称】《电子测量技术》
【年(卷),期】2014()4
【摘要】针对视频运动目标的跟踪问题,提出了一种基于改进Hausdorff距离的运动目标自动跟踪算法。
首先对视频图像作预处理,使用Canny算子进行边缘提取;然后采用对称差分算法建立运动目标的初始模板;接着采用改进的Hausdorff距离和新的匹配搜索策略,实现后续帧中运动目标与初始模板的匹配;最后,采用一种新的模板更新算法———4步法对模板进行更新。
实验结果表明,该算法不仅能准确跟踪运动目标,而且能有效提高目标跟踪效率。
【总页数】5页(P56-60)
【关键词】目标跟踪;Hausdorff距离;对称差分;图像匹配
【作者】吴乐;凌晨;周霁婷;张文俊
【作者单位】上海大学影视艺术技术学院
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于Hausdorff距离的目标跟踪算法与实现 [J], 尚俊
2.一种基于Hausdorff距离的目标跟踪算法 [J], 陶杰;毕笃彦;吉彦军
3.一种改进的Hausdorff距离目标跟踪算法 [J], 李婷;尹怡欣
4.一种改进的Hausdorff距离目标跟踪算法 [J], 李婷;尹怡欣
5.一种基于边缘特征和改进Hausdorff距离的火箭目标跟踪算法 [J], 阳小燕;李琳琳;;
因版权原因,仅展示原文概要,查看原文内容请购买。
hausdorff维数
康拉德-赫斯特距离(Hausdorff Distance)是一个度量两个集合间距离的概念。
该距离源
于名为Hausdorff维度的概念,该维度可以定义两个集合之间的度量,也可以称之为距离。
Hausdorff维度是一个常用的维度计数模型,它最初由施密特(Schmidt)度量发现,当时
它被称为康福尔格维度。
像卡曼(Carmen)、武器(Wulff)和普林西比(Pooley)这样
的物理学家教授发现这一点后,该维度被定义为康拉德-赫斯特距离(Hausdorff Distance)。
康拉德-赫斯特距离(Hausdorff Distance)定义了两个集合之间的“极大距离”,从而提供了定量的度量方法来确定两个或多个集合之间的相似度。
它可以在机器学习、数据挖掘和计
算机视觉等领域中使用,例如统一医疗影像分割,以及其他常见的分类和检测应用。
在视觉处理中,该算法可用于比较图像配准,识别相同的像素,以及计算图像尺寸变化之间的差异。
在多维信息的处理中,Hausdorff Distance也被称为多态学和地理信息系统(GIS)中的多维度度量。
它也被用于嵌入式系统,从而实现对机器人控制、导航和流程调度的多维定位和路径规划。
使用Hausdorff Distance来确定两个集合间的概念相似度具有竞争优势,因为它可以比较
其中每一个维度之间的差异,以评估两个集合之间的关系。
因此,它可以用于机器学习算
法中的内容识别和相似性比较,以及其他方面的应用。
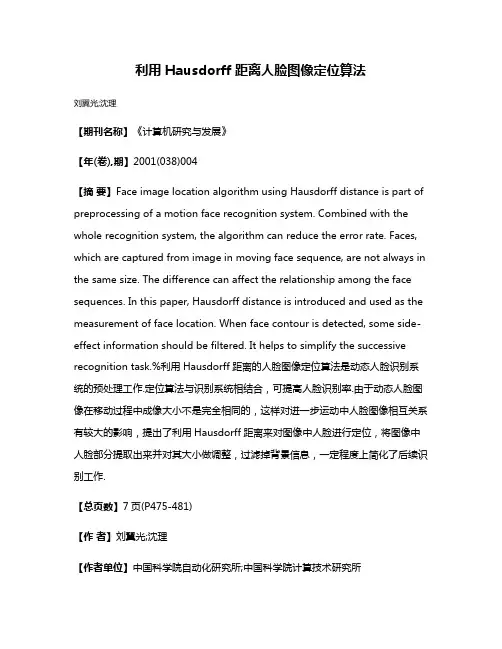
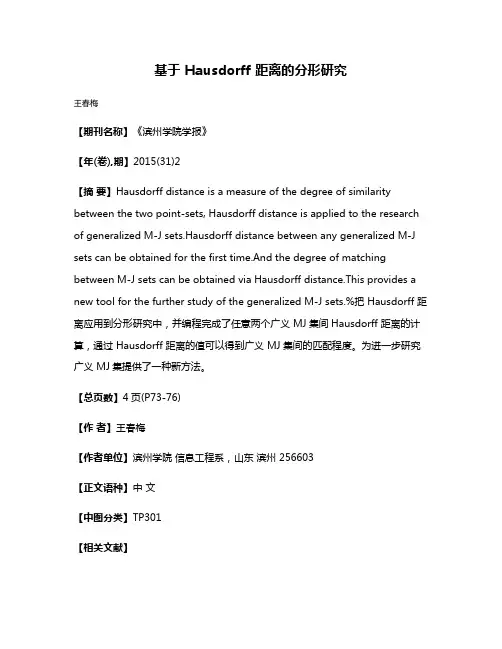
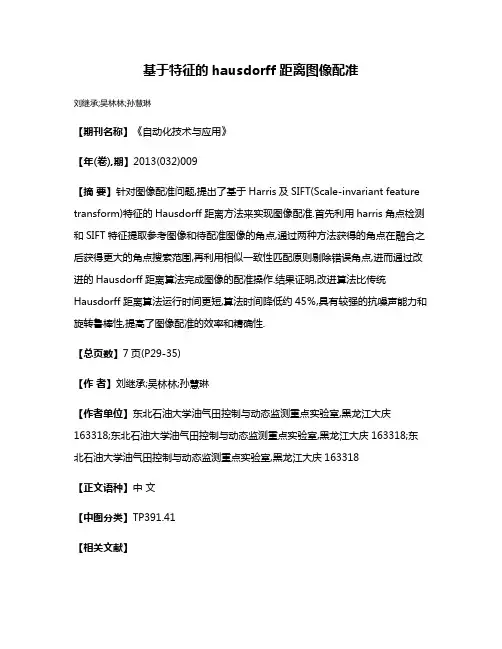
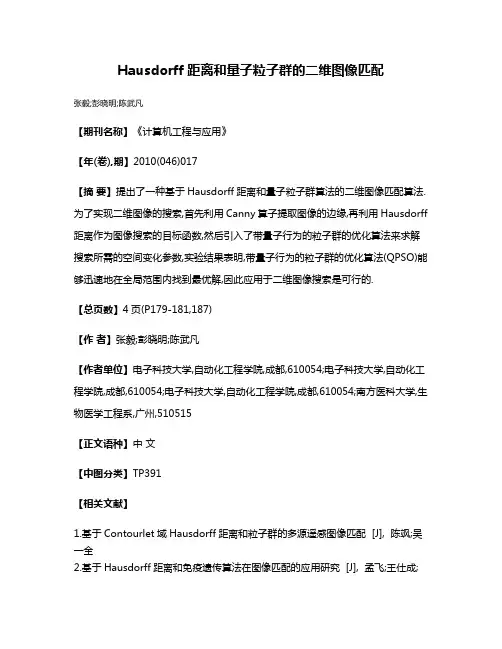
Hausdorff Distance based3D Quantification of Brain TumorEvolution from MRI ImagesFr´e d´e ric Morain-Nicolier,St´e phane Lebonvallet,´Etienne Baudrier,Su RuanAbstract—This paper presents a quantification method which can be used to quantify the evolution of a brain tumor with time.From two segmented volumes,a Local Distance Volume(LDV)based on Hausdorff Distance is computed to show the true physical local distances between them.In the case of tracking a tumor volume during a therapeutic treatment,local variations can thus be shown by the LDV in particular where the tumor has regressed and where it has growed.This information can help radiologists to adapt the current treatment.I.INTRODUCTIONAccuracy in image segmentation is a nettlesome prob-lem,especially in medical image analysis,where pre-cision in segmentation is a prerequisite for a reliable interpretation of the results.Moreover,many current prob-lems in the medical realm and diagnosis derive benefit from a precise brain segmentation.Multimodality image registration requires a good brain segmentation:indeed, surface matching techniques need to have a precise def-inition of the segmented volumes[4].As a matter of fact,any image analysis technique has to be validated in an efficient way so as to legitimize its use in clinical day-to-day applications.A rigorous definition of image quality in terms of algorithm efficiency depends on the performance of some observer on some specific task;and the mathematical models for these observers have to be designed in order to allow task automation.In particular in the domain of brain tumor segmentation,important information is the evolution of the tumor with respect to a given treatment.Accessing the global variation of the tumoral volume is afirst step but not necessarily sufficient.More precise information is the localization of the tumor variations volume.The paper is organized as follows.In thefirst part,we present the three-dimensional distance volume.This volume contains local Hausdorff distances between to references volumes.The obtained measures are robust to small registration error and are made of true physical distances.Thus it is possible localize big and small variations from one volume to the next one.The next part resumes the segmentation method used to extract the tumor.In the last section,we present the results of the local distance volume computed on these The authors are with CRESTIC-URCA,IUT de Troyes,9rue de Qu´e bec,10026Troyes Cedex, frederic.nicolier@univ-reims.fr segmented volume slices.Local variations of the tumor are highlighted,in particular where it has regressed or progressed.II.3D L OCAL D ISTANCE V OLUMEA.Distance Measure:the Choice of the Hausdorff Dis-tanceAmong distance measures over binary images,the Hausdorff distance(HD)has often been used in the content-based retrieval domain and is known to have suc-cessful applications in object matching[5],[7]or in face recognition[11].Let’s have a brief review of the definition and of some properties related to the HD.Originally meant as a measure between two point collections,forfinite sets of points,the HD can be defined as[5]:Definition1(Hausdorff distance):Given two non-emptyfinite sets of points A=(a1,...,a n)and B=(b1,...,b m)of R2,and an underlying distance d, the HD is given byD H(A,B)=max(h(A,B),h(B,A))(1)where h(A,B)=maxa∈A min b∈B d(a,b),(2)h(A,B)is the so-called directed Hausdorff distance. The interest of this measure comesfirstly from its metric properties:non-negativity,identity,symmetry and triangle inequality.Moreover,the HD is a match method-ology without point-to-point correspondence,so it is ro-bust to local non-rigid distortions.For a small translation, the Hausdorff distance is small,which matches our ex-pectation for a distance measure.Some Modified Versions of the Hausdorff Distance: the classical HD has good properties but it measures the most mismatched points between A and B,and as a consequence it is sensitive to noise[9].Indeed considering two volumes containing the same pattern and one point added to thefirst volume,far from the pattern,then the HD will measure the distance between the pattern and the point.Several modifications of the HD have been proposed to improve the classical HD[12].However,these measures are global and cannot account for local distances.Indeed, the principle of HD is to be a”max min”distance and it means that the value of the HD between two volumes is reached for at least one couple of points.But it doesn’t say if the value is reached in several parts or only for one pair,Proceedings of the 29th Annual InternationalConference of the IEEE EMBSCité Internationale, Lyon, FranceAugust 23-26, 2007.SaP2B1.24which corresponds to different degrees of distance.These remarks motivate us to design a local and parameter-free HD in the next section.B.Local HD MeasureThe notion of local distance isfirst discussed,then definition of a HD measure in a local window is presented. In all this section,A and B design two non-emptyfinite sets of points of R2,and W a convex closed subset of R2. Producing locally a distance implies to compare the two volumes locally.It can be done thanks to a sliding window.The parts of both volumes viewed through this window are compared based on a distance measure.The sliding-window size plays an important role:it shouldfit the local distance so that the distance can give a local measure.Nevertheless,here is the general idea:if the pixels located in the sliding window belong to coarse features,the window should be big enough to grasp the feature’s distances.Similarly,forfine features,a window ”bigger”than the features will include unwanted infor-mation on distances.These requirements are important to obtain robust local measure.In particular it is important to be robust to registration error.Therefore,it is necessary to adapt the size of the window to obtain precise measures. The local HD definition:the restriction of the HD to a window implies to modify its definition.It is indeed not available in the case that one of the sets is empty, which can happen in a window.Then the distance to the window border must be introduced(see[2]).With the new definition of the windowed HD,it is possible to define an algorithm which makes the windowfit the local distance for each pixel(alg.1).It consists of a sliding three-dimensional window whose radius is locally adapted tofind the local optimal radius.Algorithm1Computation of local HDcompute D H(F,G)for x a voxel don:=1{initialization of the window-size}while HD B(x,n)(F,G)=n and n HD(F,G) don:=n+1.end whileHD loc(x)=HD B(x,n−1)(F,G)=n−1end forIt is possible to express the local HD with the followingformulatoallowfast computations(for details,see[2]):Definition2(local HD(fast version)):for x a voxel of the images,HD loc(x)=|B(x)−A(x)|max(d(x,A),d(x,B))(3)(a)(b)(c)(d)(e)(f)Fig.1.Two images(a)and(b),their textured versions(d)and(e)and their LDMaps.The values of the LDMap(f)are low because of the large pattern pixel ratio in the textured images(d)and(e).The LdMap(c) between images(a)and(b)is representative(quantified and localized information)of their local differences.The formula is faster to compute than the algorithm based on the windowed HD,but the obtained value interpretation comes from the local-distance window adaptation in the algorithm.C.The Local Distance VolumeThe local HD can be computed for all the points of the space,it results in the following definition:Definition3(Local Distance Volume(LDV)):Let F and G design two non-emptyfinite sets of points of R3, the local distance volume LDV is defined by∀x∈R3,LDV(x)= HD B(x,r max)(F,G)if R=∅0if R=∅.(4) The maximum value in the local distance map is the Hausdorff distance between the two input sets.For each pixel x,the formula gives a value that depends on the distance transform of the sets A and B.Fast algorithms have been developed for distance transformation.So the LDV complexity with the formula is a O(m3),which is linear in the pixel number.Qualitative results:We present in this paragraph two kinds of images on which the a two-dimensional version of the LDV(named LDMap in this paragraph)is applied to evaluate their variation(seefig.1).The given remarks applies equally on volumes.1)Thefirst images(a)and(b) are non textured grids.(b)is a locally deformed version of (a).The obtained information is quantified and localized. The values of the LDMap(up to17)reflect the local distance between the images.Only where the grid-lines are different(between the two images)a non-zero distance is obtained.Morevover,the more important is the local distance,the more different the images are(locally).2) For the second comparison(d)and(e),the images are textured and the pattern pixel ratio is large.The obtained(a)(b)(c)Fig.2.Segmented MRI.values in(f)do not reflect the similarity in this case.Asa short conclusion,the LDMap is a useful tool for non-textured and well-defined images(or volumes).It is thususable for segmented slices.III.R ESULTSA.Segmentation MethodMRI images are acquired on a 1.5T GE(GeneralElectric Co.)machine using an axial3D IR(InversionRecuperation)T1-weighted sequence,an axial FSE(FastSpin Echo)T2-weighted,an axial FSE PD-weighted se-quence and an axial FLAIR.For one examination,wehave24slices of the four signals with a voxel sizeof0.47×0.47×5.5mm3.All the slices and all theexaminations are registrated using SPM software.We use thefirst examination for training SVM usingRBF kernel[10].The training set was obtained from oneslice by using mouse to choose ten pixels into the tumourand ten outside.We perform thefirst segmentation of thisvolume by using the SVM model obtained.So,we buildautomatically about one hundred points into the tumourand outside from all the tumoral slices.We retraining asecond SVM and use it for perform a second segmentationfor improve thefirst result.With this last SVM model,we perform the segmentation of others examinations.Ateach segmentation of examination,we use this2stepsprocess for improve the result.Fig2contains an exampleof the obtained segmentation.All the nine slices of twosegmented volumes are given infigs3and4.B.Implementation DetailsThe computation of the LDV is done with a new mageJplugin[6].With a2GHz opteron,the comparison of thetwo512×512×9volumes is done in39seconds.C.ResultsThe LDV is computed between volumes1and2.Theresults are presented infig 5.As the z-resolution isslightly greather than the x−y resolutions(with a ratio of11.7),the obtained distance depends only lightly on thez-axis information.Only when the obtained distance isgreather than11.7mm,the z-information has been takeninto account.Fig6is a three-dimensional representationof the LDV.(a)(b)(c)(d)(e)(f)Fig.3.Segmentation of thefirst volume(slicesfrom18to23,a-f)usingSVM with RBFkernel.(a)(b)(c)(d)(e)(f)Fig.4.Segmentation of the second volume(slices from18to23,a-f)using SVM with RBF kernel.As a true distance is used to compute the LDV,thegiven scalar are true physical distance in mm.The givendistances histogram indicates there are much more lowdistances than high distances.This a coherent fact as non-zero LDV values are obtained in the intersection of the twovolumes.The intersection is locallyfilled with increasingvalues,starting from zero up to the maximum localdistance between the volumes.The maximum distanceis15.56mm.This represent the higher straight distancebetween the two volumes.The proposed Local Distance V olume can be used totrack more precisely the variations between two volumes.The Hausdorff Distance in a window(eq.(3))is defined asthe maximum of two directed distance.In the present casethe directed distances carry useful information.h W(A,B)carry the information on voxels present in vol.1and not invol.2.Symmetrically h W(B,A)carry the information onvoxels present in vol.2and not in vol.1.So h W(A,B)indicates where the tumor has regressed and h W(B,A)where the tumor has progressed.This is illustrated infig.7andfig.8.The augmentation of the central occlusion is(a)(b)(c)(d)(e)(f)(j)Fig.5.Slices18to23(a-f)of the Local Distance V olume betweenvolumes1(fig3)and2(fig4).The distances are absolute according toeq.(3).(j)is thedistance histogram(logarithmic scale in gray)and thecolormap of images(a-f).Fig.6.A three-dimensional view of the LDV between volumes1and2.clearly seen(by high negative distances).IV.CONCLUSIONA distance measure between volumes has been pre-ing local Hausdorff distances,the Local Dis-tance V olume(LDV)is computed with adaptative sizewindows.This method allows to indicates where thevolumes are similar.The LDV has been successfullyapplied on segmented MRI volumes containing a tumor.The evolution of the tumor between two acquisitions canbe quantified by the obtention of true physical distancesbetween volumes.Moreover,the method allow to trackwhere the tumor has regressed and where it has pro-gressed.R EFERENCES[1] E.Baudrier,lon,F.Nicolier,R.Seulin,S.Ruan,Hausdorffdistance based multiresolution maps applied toanimage similaritymeasure,to appear in Imaging Science Journal.(a)(b)ing the directed Hausdorff Distance to show where thetumor has regressed(in white with negative distances)and where ishas progressed(in black with positive distances).(a)is the LDV withdirected distances(only slice5is presented corresponding to(b)in3and4).(b)is the histogram and the colormap of the directed LDV.ing the directed Hausdorff Distance to show where thetumor has regressed(in black with negative distances)and where ishas progressed(in white with positive distances).[2] E.Baudrier,lon, F.Nicolier,S.Ruan,A fast binary-image comparison method with local-dissimilarity quantification,International Conference on Pattern Recognition(ICPR’06),HongKong,vol.3,20-24aug.,2006,pp216-219.[3]G.Borgefors,Distance transformations in digital images,Comput.Vision Graph.Image Process,vol.34,no.3,1986,pp344–371.[4]J.C.De Munck et al.,Registration of MR and SPECT withoutusing externalfiducial markers,Phys.Med.Biol.,vol.43,no.5,1998,pp1255-1269.[5] D.P.Huttenlocher,W.J.Rucklidge,Comparing Images Using theHausdorff Distance,IEEE Transactions on Pattern Analysis andMachine Intelligence,vol.15,no.9,1993,pp850–863.[6]ImageJ,Image Processing and Analysis in Java,/ij.[7]O.K.Kwon, D.G.Sim,R.H.Park,Robust hausdorff distancematching algorithms using pyramidal structures,Pattern Recogni-tion,vol.34,no.10,2001.[8]Y.Lu,C.Tan,W.Huang,L.Fan,An approach to word imagematching based on weighted Hausdorff distance,Proc.6th Internat.Conf.on Document Anal.Recogn.,2001,pp921–925.[9]J.Paumard,Robust comparison of binary images,Pattern Recog-nition Letters,vol.18,no.10,1997,pp1057–1063.[10]S.Ruan,S.Lebonvallet,A.Merabet,J.M.Constans,Tumor Seg-mentation from a Multispectral MRI Images by Using SupportVector Machine Classification,to appear in ISBI’07,2007,Wash-ington(USA).[11] B.Takacs,Comparing faces using the modified Hausdorff distance,Pattern Recognition,vol.31,no.12,1998,pp1873–1881.[12] C.Zhao,W.Shi,Y.Deng,A new Hausdorff distance for imagematching,Pattern Recognition Letters,vol.26,2004,pp581–586.。