S7-1200 PLC 基于 Modbus 通信协议的数据采集及远程传送应用-论文
- 格式:pdf
- 大小:137.54 KB
- 文档页数:2
s7-1200plc的modbustcp通信分析S7-1200 PLC是西门子公司推出的一款低成本、可编程的控制器,具有高效稳定的运行和良好的可扩展性,可满足工业自动化控制系统中的各种需求。
Modbus TCP通信是一种常见的工业通信协议,支持TCP/IP协议栈,可以广泛地应用于工业自动化系统中。
S7-1200 PLC提供了多种通信接口,包括以太网接口、串口接口等,其中以太网接口是支持Modbus TCP通信协议的。
以太网接口允许PLC与其他设备进行数据通信,其中包括Modbus TCP通信。
Modbus TCP通信协议是Modbus ASCII和Modbus RTU通信协议的延伸,使用开放式通信协议,基于TCP/IP网络,具有更高的传输速度和更强的可靠性。
Modbus TCP通信协议使用TCP连接代替串行连接,可以同时连接多个设备。
Modbus TCP通信协议支持各种数据传输方式,包括二进制数据、ASCII码和RTU形式。
Modbus TCP通信协议采用了客户端/服务器模型,客户端发送请求,而服务器则对请求进行响应。
S7-1200 PLC作为服务器,接收客户端的请求,处理请求并返回相应的结果。
S7-1200 PLC使用TSEND_C函数和TRCV_C函数实现Modbus TCP通信。
TSEND_C函数用于发送数据,TRCV_C函数用于接收数据。
在使用TSEND_C函数和TRCV_C函数前,需要对Modbus TCP通信进行初始化。
初始化Modbus TCP通信需要设置IP地址、端口号和通信参数等。
在Modbus TCP通信中,每个数据都有一个唯一的标识号,称为寄存器地址。
寄存器地址用于识别数据在PLC中的位置。
S7-1200 PLC支持读取位、读取字和读取双字等不同的读取方式,可以根据需要进行设置。
S7-1200 PLC还支持写入位、写入字和写入双字等不同的写入方式。
Modbus TCP通信协议需要设备地址来确定通信设备,S7-1200 PLC的设备地址默认为1。
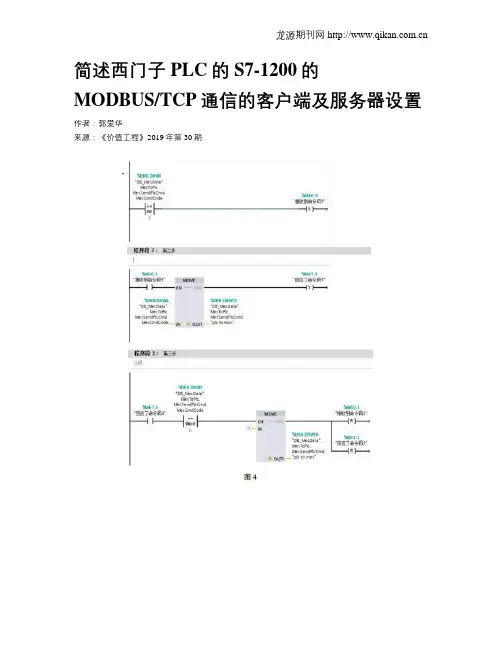
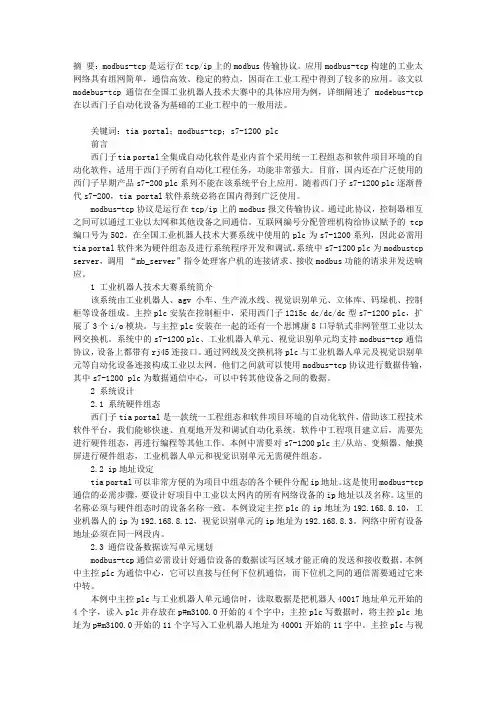
简述西门子PLC的S7-1200的MODBUS/TCP通信的客户端及服务器设置作者:郭爱华来源:《价值工程》2019年第30期摘要:MODBUS/TCP是MODBUS 通讯中的一种以太网通讯方式,MODBUS/TCP通讯对使用硬件要求低,应用广泛。
西门子PLC的S7-200可以设置为MODBUS/TCP通信方法,其中使用了两个MODBUS/TCP命令“MB_CLIENT”指令和“MB_SERVER”指令,它们分别将PLC设置MODBUS客户端和MODBUS服务器,本文重点介绍这两个命令的设置方法。
Abstract: MODBUS/TCP is an Ethernet communication method in MODBUS communication. MODBUS/TCP communication has low hardware requirements and a wide range of uses. The Siemens PLC S7-1200 can be set to the MODBUS/TCP communication method, in which two MODBUS/TCP commands "MB_CLIENT" and "MB_SERVER" are used, which respectively set the PLC as a MODBUS client for industrial robots and MODBUS server for MES manufacturing process execution and management system. This paper focuses on the setting methods of these two commands.关键词:MODBUS/TCP;S7-1200;客户端;服务器Key words: MODBUS/TCP;S7-1200;client;server中图分类号:TP368.5 ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;文献标识码:A ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;文章编号:1006-4311(2019)30-0204-030 ;引言自动化系统包括多种通讯协定,它们是可以应用于工业控制器上的通用语言。
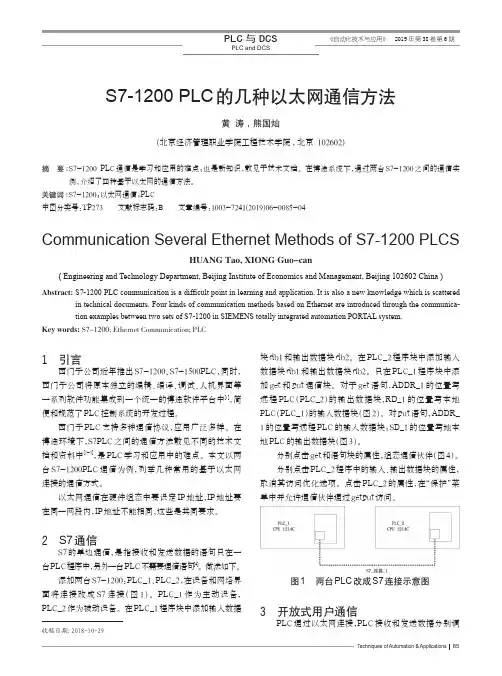
Techniques of Automation &ApplicationsS7-1200PLC 的几种以太网通信方法黄涛,熊国灿(北京经济管理职业学院工程技术学院,北京102602)摘要:S7-1200PLC 通信是学习和应用的难点;也是新知识,散见于技术文档。
在博途系统下,通过两台S7-1200之间的通信实例,介绍了四种基于以太网的通信方法。
关键词:S7-1200;以太网通信;PLC 中图分类号:TP273文献标志码:B文章编号:1003-7241(2019)06-0085-04Communication Several Ethernet Methods of S7-1200PLCSHUANG Tao,XIONG Guo-can(Engineering and Technology Department,Beijing Institute of Economics and Management,Beijing 102602China )Abstract:S7-1200PLC communication is a difficult point in learning and application.It is also a new knowledge which is scatteredin technical documents.Four kinds of communication methods based on Ethernet are introduced through the communica-tion examples between two sets of S7-1200in SIEMENS totally integrated automation PORTAL system.Key words:S7-1200;Ethernet Communication;PLC收稿日期:2018-10-291引言西门子公司近年推出S7-1200、S7-1500PLC,同时,西门子公司将原本独立的编辑、编译、调试、人机界面等一系列软件功能集成到一个统一的博途软件平台中[1],简便和规范了PLC 控制系统的开发过程。
s7-1200plc的modbustcp通信分析ModbusTCP是基于TCP/IP的Modbus协议的实现方式。
它是一种网络协议,主要用于通信控制器,设备和相关电子设备之间的沟通。
本文主要讨论S7-1200PLC的ModbusTCP通信分析。
1,介绍:S7-1200PLC 是一种可编程控制器,可以为客户提供最智能的系统结构和最全面的功能,为工业应用控制提供极高的性能。
因为支持ModbusTCP,它也可以作为工业网络的一种通信协议。
2,ModbusTCP协议:ModbusTCP协议基于TCP/IP协议,它是Modbus协议的网络实现,它使得Modbus协议可以在以太网上使用。
ModbusTCP协议对以太网上的以太网报文进行了一定的封装,来实现Modbus混合以太网通信。
ModbusTCP协议中主要涉及三方面内容:(1) Modbus从机地址:Modbus从机一般有32个,其地址从1开始,最多可达到255;(2) Modbus功能码: ModbusTCP功能码包括01,02,03,04,05,06,15,16,17等,各种功能码对应不同的功能,需要根据不同要求而定;(3)数据长度:这个是需要传输的数据字节长度和格式,以帧传输为例,一个帧可以传输8个字节,共用2个字节定义数据长度。
3,S7-1200PLC的ModbusTCP应用:S7-1200PLC使用ModbusTCP协议,是可以将本地的Modbus从机的设备连接到一个中央的Modbus主机。
它可以实现实时的数据传输和状态检测,来方便实现可靠的远程监测系统。
S7-1200PLC的ModbusTCP应用有以下几点:(1)支持Modbus TCP/IP的RTU和ASCII模式通信,可实现设备远程监测;(2)可实现Modbus客户端和服务器端,支持以组播或广播形式发送读数据,支持双向数据交换;(3)可以实现功能码01至0B和1E至4D的读写,支持读取字和位,支持Modbus TCP的多种功能码;(4)支持网络拓扑结构和网络地址搜索,可在不同IP地址域中实现统一的远程管理;(5)可以进行多种通信方式的转换,支持Modbus、OPC、OGEM、OPL等多种协议通信;(6)支持缓冲数据报文转发功能,实时控制读写数据;(7)实现Modbus单片机应用控制,可在实时系统中迅速添加新的通信协议;(8)能够实现多用户的安全管理,通过密码进行数据时间校验。

s7-1200plc的modbustcp通信分析S7-1200 PLC是西门子推出的一款高性能、高可靠的工业自动化控制器,它具有紧凑的结构和强大的功能,适用于各种工业控制应用。
而ModbusTCP是一种常用的工业通信协议,它被广泛应用于工业控制系统中,用于PLC、HMI和其他设备之间的通信。
本文将对S7-1200 PLC的ModbusTCP通信进行分析,探讨其通信原理、配置方法和常见问题及解决方法,以帮助工程师更好地理解和应用S7-1200 PLC的ModbusTCP通信功能。
1. ModbusTCP通信原理ModbusTCP是基于TCP/IP协议的Modbus通信协议的一种实现方式,它采用了现代化的网络通信技术,具有高速传输、稳定性强等特点。
在S7-1200 PLC中,通过配置S7-1200 CPU的通信模块,可以实现与其他设备(如HMI、传感器、执行器等)之间的ModbusTCP通信。
通信的基本原理是通过TCP/IP网络将数据从一个设备传输到另一个设备,其中包括ModbusTCP通信的功能码、数据地址、数据类型等信息。
S7-1200 PLC通过配置ModbusTCP 通信参数,建立与其他设备的通信连接,实现数据的读取和写入。
S7-1200 PLC的ModbusTCP通信配置主要包括以下几个步骤:2.1 配置CPU参数打开TIA Portal软件,选择相应的S7-1200 PLC项目,进入PLC程序编辑界面。
在“设备配置”中选择CPU,点击“属性”进行参数配置。
在“通信”选项中选择“以太网”通信方式,并配置IP地址、子网掩码等基本参数。
还需配置CPU的ModbusTCP通信功能使能,并设置通信模块的通信速率、数据位数等相关参数。
2.3 配置通信数据区在TIA Portal软件中,选择PLC程序编辑界面,添加ModbusTCP通信的数据区。
根据通信需求,设置读写数据的地址、数据类型、数据长度等参数。
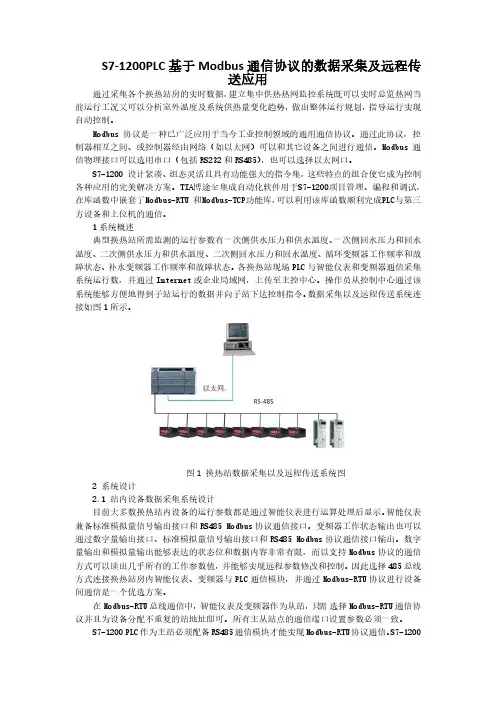
S7-1200PLC 基于Modbus 通信协议的数据采集及远程传送应用通过采集各个换热站房的实时数据,建立集中供热热网监控系统既可以实时总览热网当前运行工况又可以分析室外温度及系统供热量变化趋势,做出整体运行规划,指导运行实现自动控制。
Modbus 协议是一种已广泛应用于当今工业控制领域的通用通信协议。
通过此协议,控制器相互之间、或控制器经由网络(如以太网)可以和其它设备之间进行通信。
Modbus 通信物理接口可以选用串口(包括RS232和RS485),也可以选择以太网口。
S7-1200 设计紧凑、组态灵活且具有功能强大的指令集,这些特点的组合使它成为控制各种应用的完美解决方案。
TIA 博途全集成自动化软件用于S7-1200项目管理、编程和调试,在库函数中嵌套了Modbus-RTU 和Modbus-TCP 功能库,可以利用该库函数顺利完成PLC 与第三方设备和上位机的通信。
1系统概述典型换热站所需监测的运行参数有一次侧供水压力和供水温度、一次侧回水压力和回水温度、二次侧供水压力和供水温度、二次侧回水压力和回水温度、循环变频器工作频率和故障状态、补水变频器工作频率和故障状态。
各换热站现场PLC 与智能仪表和变频器通信采集系统运行数,并通过Internet 或企业局域网,上传至主控中心。
操作员从控制中心通过该系统能够方便地得到子站运行的数据并向子站下达控制指令。
数据采集以及远程传送系统连接如图1所示。
2 系统设计2.1 站内设备数据采集系统设计目前大多数换热站内设备的运行参数都是通过智能仪表进行运算处理后显示。
智能仪表兼备标准模拟量信号输出接口和RS485 Modbus 协议通信接口。
变频器工作状态输出也可以通过数字量输出接口、标准模拟量信号输出接口和RS485 Modbus 协议通信接口输出。
数字量输出和模拟量输出能够表达的状态位和数据内容非常有限,而以支持Modbus 协议的通信方式可以读出几乎所有的工作参数值,并能够实现远程参数修改和控制。

S7-1200 PLC通信模块介绍S7-1200 PLC具有非常强大的通信功能,提供PROFINET、PROFIBUS、远距离控制通信、点对点通信、USS通信、Modbus RTU(远程终端单元)、执行器传感器接口(Actuator Sensor Interface,AS-i通信)等通信功能。
通信模块和通信处理器(Communication Processor, CP)将扩展CPU的通信接口,S7-1200 PLC最多可扩展3个通信模块(CM 或CP),它们安装在CPU模块的左侧。
1.集成的PROFINET接口实时工业以太网是现场总线发展的趋势,PROFINET是基于工业以太网的现场总线,是开放式的工业以太网标准,它使工业以太网的应用扩展到了控制网络最底层的现场设备。
S7-1200 PLC CPU模块集成的PROFINET接口可用于与编程设备(STEP 7)通信,通信时将PROFINET电缆一端插入PLC的CPU模块,另一端插入计算机或编程设备的以太网接口,如图1所示;其与HMI 设备通信(用于可视化)或与其他PLC通信如图2所示。
此外,它还通过开放的以太网协议TCP/IP、ISO-on-TCP、Modbus TCP支持与第三方设备的通信,还可通过成熟的S7通信协议连接到多个S7控制器和HMI设备。
图1 S7-1200 PLC与编程设备通信图2 S7-1200 PLC与HMI、PLC的通信S7-1200 PROFINET接口由一个RJ45连接器组成。
该连接器具有自动交叉网线功能,因此一个标准或是交叉的以太网线都可以用于该接口,支持最多23个以太网连接,数据传输速率达10/100Mbit/s。
CSM 1277是一个4端口的紧凑型交换机,用户可以通过它将S7-1200 PLC连接到最多3个附加设备,以便轻松组建网络。
2.PROFIBUS通信与通信模块PROFIBUS是目前国际上通用的现场总线标准之一。
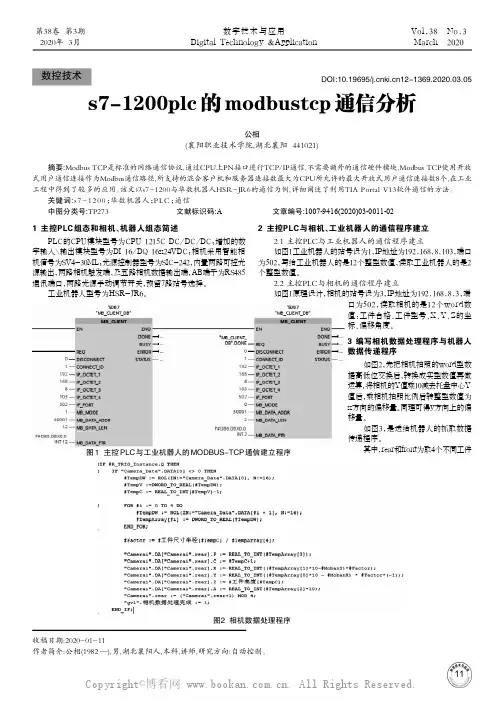
111 主控PLC组态和相机、机器人组态简述PLC的CPU模块型号为CPU 1215C DC/DC/DC;增加的数字输入\输出模块型号为DI 16/DQ 16x24VDC;相机采用智能相机信号为SV4-30ML;光源控制器型号为SIC-242,内置两路可控光源输出,两路相机触发端,及五路相机数据输出端,AB端子为RS485通讯端口,两路光源手动调节开关,预留7路站号选择。
工业机器人型号为HSR-JR6。
2 主控PLC与相机、工业机器人的通信程序建立2.1 主控PLC与工业机器人的通信程序建立如图1工业机器人的站号设为1,IP地址为192.168.8.103,端口为502,写给工业机器人的是12个整型数值,读取工业机器人的是2个整型数值。
2.2 主控PLC与相机的通信程序建立如图1原理设计,相机的站号设为3,IP地址为192.168.8.3,端口为502,读取相机的是12个word数值:工件合格、工件型号、X、Y、Z的坐标、偏移角度。
3 编写相机数据处理程序与机器人数据传递程序如图2,先把相机拍照的word型数据高低位交换后,转换成实型数值再做运算,将相机的Y值乘10减去托盘中心Y 值后,乘相机拍照比例后转整型数值为x方向的偏移量。
同理可得y方向上的偏移量。
如图3,是送给机器人的抓取数据传递程序。
其中,rear和front为取4个不同工件收稿日期:2020-01-11作者简介:公相(1982—),男,湖北襄阳人,本科,讲师,研究方向:自动控制。
s7-1200plc 的modbustcp 通信分析公相(襄阳职业技术学院,湖北襄阳 441021)摘要:Modbus TCP是标准的网络通信协议,通过CPU上PN接口进行TCP/IP通信,不需要额外的通信硬件模块,Modbus TCP使用开放式用户通信连接作为Modbus通信路径,所支持的混合客户机和服务器连接数最大为CPU所允许的最大开放式用户通信连接数8个,在工业工程中得到了较多的应用。

s7-1200plc的modbustcp通信分析西门子S7-1200 PLC是一种高级控制器,可用于控制和监控各种工业过程。
它支持多种通信协议,其中包括Modbus TCP。
Modbus TCP是一种通信协议,用于在工业自动化系统中传输数据。
S7-1200 PLC通过Modbus TCP与其他设备进行通信,例如传感器、执行器或其他PLC。
在Modbus TCP通信中,PLC可以充当Modbus TCP客户端或服务器。
客户端将发送请求并接收响应,而服务器将接收请求并返回响应。
在进行Modbus TCP通信之前,首先需要配置PLC的网络设置。
这包括IP地址、子网掩码和网关地址。
确保与其他设备在相同的网络上,并确保其IP地址在网络范围之内。
在PLC中,需要创建一个Modbus TCP通信模块。
在该模块中,可以定义与其他设备之间的通信参数,例如IP地址和端口号。
还可以定义要发送和接收的数据类型和数据量。
PLC还需要定义Modbus TCP请求和响应。
请求通常包括读取或写入数据的目标设备地址、数据类型和数据长度。
响应包括返回的数据。
在PLC中发送Modbus TCP请求时,首先需要建立与目标设备的连接。
然后,将请求发送到目标设备的IP地址和端口号。
目标设备将接收到的请求进行处理,并返回响应。
在PLC中接收Modbus TCP响应时,首先需要检查响应的状态。
如果响应正常,则可以提取所需的数据。
如果响应错误,则需要进行适当的处理。
在进行Modbus TCP通信时,还需要注意数据的顺序。
有两种顺序可供选择:Big-Endian(大端)和Little-Endian(小端)。
确保在PLC和其他设备之间选择相同的顺序,以确保数据的正确传输和解释。
西门子S7-1200 PLC通过Modbus TCP实现与其他设备的通信。
在进行通信之前,需要配置网络设置和创建通信模块。
然后,可以通过发送请求和接收响应来进行通信。
为保证通信的正常进行,需要注意数据顺序和处理响应的状态。
摘要:modbus-tcp是运行在tcp/ip上的modbus传输协议。
应用modbus-tcp构建的工业太网络具有组网简单,通信高效、稳定的特点,因而在工业工程中得到了较多的应用。
该文以modebus-tcp通信在全国工业机器人技术大赛中的具体应用为例,详细阐述了modebus-tcp 在以西门子自动化设备为基础的工业工程中的一般用法。
关键词:tia portal;modbus-tcp;s7-1200 plc前言西门子tia portal全集成自动化软件是业内首个采用统一工程组态和软件项目环境的自动化软件,适用于西门子所有自动化工程任务,功能非常强大。
目前,国内还在广泛使用的西门子早期产品s7-200 plc系列不能在该系统平台上应用。
随着西门子s7-1200 plc逐渐替代s7-200,tia portal软件系统必将在国内得到广泛使用。
modbus-tcp协议是运行在tcp/ip上的modbus报文传输协议。
通过此协议,控制器相互之间可以通过工业以太网和其他设备之间通信。
互联网编号分配管理机构给协议赋予的tcp 编口号为502。
在全国工业机器人技术大赛系统中使用的plc为s7-1200系列,因此必需用tia portal软件来为硬件组态及进行系统程序开发和调试。
系统中s7-1200 plc为modbustcp server,调用“mb_server”指令处理客户机的连接请求、接收modbus功能的请求并发送响应。
1 工业机器人技术大赛系统简介该系统由工业机器人、agv小车、生产流水线、视觉识别单元、立体库、码垛机、控制柜等设备组成。
主控plc安装在控制柜中,采用西门子1215c dc/dc/dc型s7-1200 plc,扩展了3个i/o模块。
与主控plc安装在一起的还有一个思博康8口导轨式非网管型工业以太网交换机。
系统中的s7-1200 plc、工业机器人单元、视觉识别单元均支持modbus-tcp通信协议,设备上都带有rj45连接口。
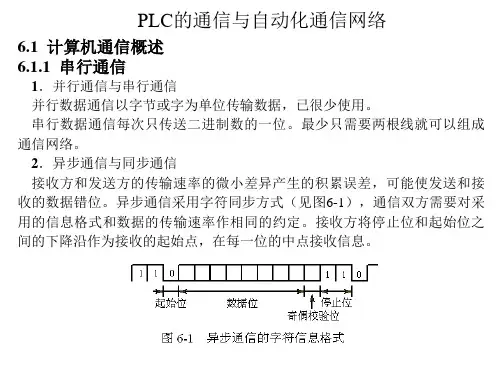
S7-1200 串行通信ptp点对点modbus rtu及uss通信奇偶校验通迅模块cm1241rs232rs485rs422 Master SlaveS7-1200支持的串行通讯方式∙点对点(PtP)通信∙Modbus 主从通信∙USS 通信S7-1200 串口通信模块的特征图1. 串口通信模块1.由CPU 供电,不必连接外部电源2.端口经过隔离,最长距离1000 米3.有诊断LED 及显示传送和接收活动LED4.支持点对点协议5.通过扩展指令和库功能进行组态和编程RS485 与RS232 通信模块的LED诊断LED 灯∙红闪:如果CPU 未正确识别到通信模块,诊断LED 会一直红色闪烁∙绿闪:CPU 上电后已经识别到通信模块,但是通信模块还没有配置∙绿灯:CPU 已经识别到通信模块,且配置也已经下载到了CPU 发送LED 灯∙代表数据正在通过通信口传送出去接收LED 灯∙代表数据正在通过通信口接收进来注意:通信板CB1241 只有发送和接收LED 灯,而没有诊断LED 灯串口模板支持的协议∙ASCII∙USS∙Modbus RTU Master protocol∙Modbus RTU Slave protocolASCII 协议的特点∙报文可以由用户自己定义,便于用户以ASCII 协议为基础开发∙使用简单,可以很好地实现与第三方系统的通讯∙可以进行识别报文结束设置∙可以进行数据流量控制∙缺点:具有简单的校验功能(奇偶校验),低数据安全性;数据传输无确认信息;通讯需要双方协调S7-1200 的PTP 校验串口的校验:奇偶校验:用于检验数据传递的正确性,是最简单的检错方法。
图2. 校验设置∙偶校验:如果每字节的数据位中“1”的个数为奇数,则校验位为1,如果个数为偶数,则校验位为“0”,保证数据位和校验位中“1”的个数是偶数∙奇校验:如果每字节的数据位中“1”的个数为奇数,则校验位为0,如果个数为偶数,则校验位为“1”,保证数据位和校验位中“1”的个数是奇数∙传号校验:奇偶校验位始终设置为1∙空号校验:奇偶校验位始终设置为0注意:奇偶校验可以简单的判断数据的正确性,从原理上可看出当一位出错,可以准确判断,当两位或更多位误码就校验不出,但由于其实现简单,仍得到了广泛使用。
西门⼦PLCs7-1200modbus-tcp通信实例编程详细指导西门⼦S7-1200 Modbus-TCP通信例⼦【】绝密【】NDA【X】公开⼀、组⽹概述本⽂以 ZKA-4488-ETH 为例介绍西门⼦PLC与深圳市综科智控科技开发有限公司的IO设备进⾏Modbus通讯的步骤设置。
ZKA-4488-ETH 是 8 路数字量输⼊(DI),8 路数字量输出(DO),4路模拟量输⼊(AI,0/4-20mA),4 路模拟量输出设备(AO,0/4-20mA),以太⽹通信。
以 ZKA-4488-ETH 为例,出⼚默认通讯参数如下:ZK模块 IP 为:192.168.0.105TCP 端⼝为:10001(注意:我们模块出⼚时默认端⼝为10001,客户也可以通过ZK模块的配置⽂件把ZK通讯端⼝改成modbus-tcp的默认端⼝502)⼯作模式为:服务器模式⼆、S7-200 Modbus TCP通信1 S7-200 Modbus T CP 通信简介Modbus 是公开通信协议,详细的协议和规范,请访问Modbus 组织的⽹站:/S7-1200 CPU 本体上集成了⼀个 PROFINET 通信⼝,⽀持以太⽹和基于TCP/IP和UDP 的通信标准。
这个PROFINET 物理接⼝是⽀持10/100Mb/s的 RJ45⼝,⽀持电缆交叉⾃适应,因此⼀个标准的或是交叉的以太⽹线都可以⽤于这个接⼝。
使⽤这个通信⼝可以实现 S7-1200 CPU 与编程设备的通信,与HMI触摸屏的通信,以及与其它 CPU 之间的通信,S7-1200 CPU 的PROFINET 通信⼝主要⽀持以下通信协议及服务Profinet IO (V2.0开始)S7 通信(V2.0开始⽀持客户端)TCPISO on TCPUDP(V2.0开始)Modbus TCPHMI通信Web通信(V2.0开始)。
硬件版本V4.1 ⽀持的协议和最⼤的连接资源:S7-1200的连接资源分配给每个类别的预留连接资源数为固定值;您⽆法更改这些值。
S7-1200编程及应用1.低压电器通常是指在交流额定电压1200V、直流额定电压1500V及以下的电路中起通断、保护、控制或调节作用的电器产品。
低压电器产品包括以下12大类:刀开关和刀形转换开关、熔断器、断路器、控制器、接触器、启动器、控制继电器、主令电器、电阻器及变阻器、调整器、电磁铁、其它低压电器(触电保护器、信号灯与接线盒等)。
2.电器按工作电压等级分:高压电器和低压电器按动作原理分:手动电器和自动电器按用途分:控制电器(继电器,接触器,按钮等)、配电电器(低压隔离器,熔断器,断路器等)、执行电器(电磁铁,电磁离合器等)按工作原理分:电磁式电器和非电量控制电器。
3.配电系统对电器的要求是:在系统发生故障的情况下,动作准确,工作可靠,有足够的热稳定性和电稳定性。
常见的配电电器有低压隔离器(刀开关)、熔断器、断路器等。
4.控制电器主要用于电力拖动控制系统和用电设备的通断控制,对控制电器的要求是:工作准确可靠,操作频率高,寿命长等。
常见的控制电器:继电器、接触器、按钮、行程开关、变阻器、主令开关、热继电器、启动器等。
5熔断器(1)用途:利用金属导体为熔体,串联于电路,当过载或短路电流通过熔体时,因其自身发热而熔断,从而分断电路的电器。
熔断器主要作短路保护之用,有时也可作为过载保护。
(2)特点:熔断器的结构简单,分断能力高、使用方便、体积小、重量轻、价格便宜,在工农业生产中使用极为广泛。
熔断器主要由熔体(保险丝)和熔管(熔座)组成。
(3)组成:熔体由易熔金属材料铅、锌、锡、银、铜及其合金制成,通常制成丝状和片状。
熔管是装熔体的外壳,由陶瓷、绝缘钢纸制成,在熔体熔断时兼有灭弧作用。
(4)型号:熔断器的常用型号有:RL6、RL7、RT12、RT14、RT15、RT16(NT)、RT18、RT19(AM3)、RO19、RO20、RTO等。
(5)参数①额定电压指熔断器长期工作时和熔断后所能承受的电压。
熔断器的交流额定电压(单位为V)有: 220, 380,415,500,600,1140;直流额定电压(单位为V)有:110,220,440,800,1000,1500。
s7-1200plc的modbustcp通信分析s7-1200 PLC是西门子公司推出的一款高性能工业控制器,具有可靠性高、功能强大等特点,被广泛应用于自动化生产线、工业设备控制等领域。
而Modbus TCP通信协议是一种常用的工业现场通信协议,在工业自动化领域得到了广泛应用。
本文将针对s7-1200 PLC的Modbus TCP通信进行分析,以期为工程师和技术人员提供参考。
一、Modbus TCP通信概述Modbus TCP是Modbus协议在TCP/IP网络上的应用方式,是一种常用的工业现场通信协议,广泛应用于工业控制系统、自动化设备等领域。
Modbus TCP协议使用端口号为502,采用客户端-服务器(Client-Server)的通信模式,客户端主动向服务器发起请求,并接收服务器的响应数据。
Modbus TCP协议具有简单、易实现、广泛应用等特点,成为工业领域的通信标准之一。
二、s7-1200 PLC的Modbus TCP通信功能s7-1200 PLC具有丰富的通信功能,可以通过内置的以太网接口实现Modbus TCP通信。
用户可以通过编程的方式,实现s7-1200 PLC与其他设备之间的Modbus TCP通信,实现数据的读取、写入等功能。
s7-1200 PLC支持Modbus TCP协议的客户端功能,可以主动向Modbus TCP服务器发送请求,并接收服务器的响应数据。
通过s7-1200 PLC的Modbus TCP 通信功能,用户可以方便地实现PLC与其他设备的数据交换,满足工业自动化系统的需求。
1. 配置通信参数:在TIA Portal中配置s7-1200 PLC的通信参数,包括Modbus TCP 服务器的IP地址、端口号等。
2. 编写通信程序:通过LAD、FBD等编程语言编写通信程序,在程序中调用TSEND、TRCV等函数实现与Modbus TCP服务器的通信。
3. 测试通信功能:上传程序至s7-1200 PLC,进行在线仿真测试,验证通信功能是否正常。
西门子 1200PLC与施耐德昆腾 PLC使用ModbusTCP协议通讯实验摘要:PLC在工业自动化控制领域应用越来越广泛,不同品牌的PLC之间的数据交互也更加频繁,双方要实现数据交互就要支持和遵守共同的通讯规约。
本文以西门子1200PLC和施耐德昆腾PLC用ModbusTCP协议进行了通讯实验,实现了双方的数据交互,为同类通讯提供了借鉴作用。
关键词:PLC ModbusTCP 通讯引言:我公司生产现场新增加多套收尘器,收尘器所用控制器为西门子S7-1200PLC,需要与公司原有施耐德昆腾PLC进行数据交互。
由于S7-1200的I/0点数不足,且只有以太网口,所以考虑使用ModbusTCP协议来实现功能。
S7-1200PLC无论是做客户端还是做服务器都需要设置参数和编程,而昆腾 PLC做服务器是不需要设置参数和编程的,为了简便操作,本次采用S7-1200PLC做客户端,昆腾 PLC做服务器的方式进行通讯。
所以大部分工作是在1200PLC编程软件上进行的,具体步骤如下:一、设置S7-1200PLC的IP地址,启用系统和时钟存储器。
S7-1200PLC要和原昆腾PLC的 IP地址保持在同一网段,根据IP地址分配表,给1200PLC分配IP地址100.100.0.xxx。
勾选启用系统存储器字节和时钟存储器字节选框,系统存储器字节的地址默认为MB1,时钟存储器字节的地址默认为MB0。
二、S7-1200PLC新建一个全局DB块,命名通讯格式,是用来设置存储通讯参数的。
DB块内新建一个TCON_IP_V4数据类型,此类型无法选择,只能手动输入,用于和昆腾 PLC读数据和写数据。
结构如下图。
三、新建1个全局DB块,命名通讯数据,用来存储与昆腾 PLC传递的数据,取消“优化的快访问”选项,同时可添加通讯状态的数据。
四、编写通讯程序,在OB1里调用MODBUS TCP客户端指令MB_CLIENT两次,分别设置为读和写功能,用于和昆腾PLC通讯,S7-1200PLC为客户端,昆腾PLC为服务器。