离散系统与连续时间系统的根本差别是:离散系统(图3)有采样开关存在,而连续系统则无。连续信号经过采样开关变成离散信号(图4),采样开关起这理想脉冲发生器的作用,通过它将连续信号调制成脉冲序列。
图3 离散系统方块图图4 离散型时间函数
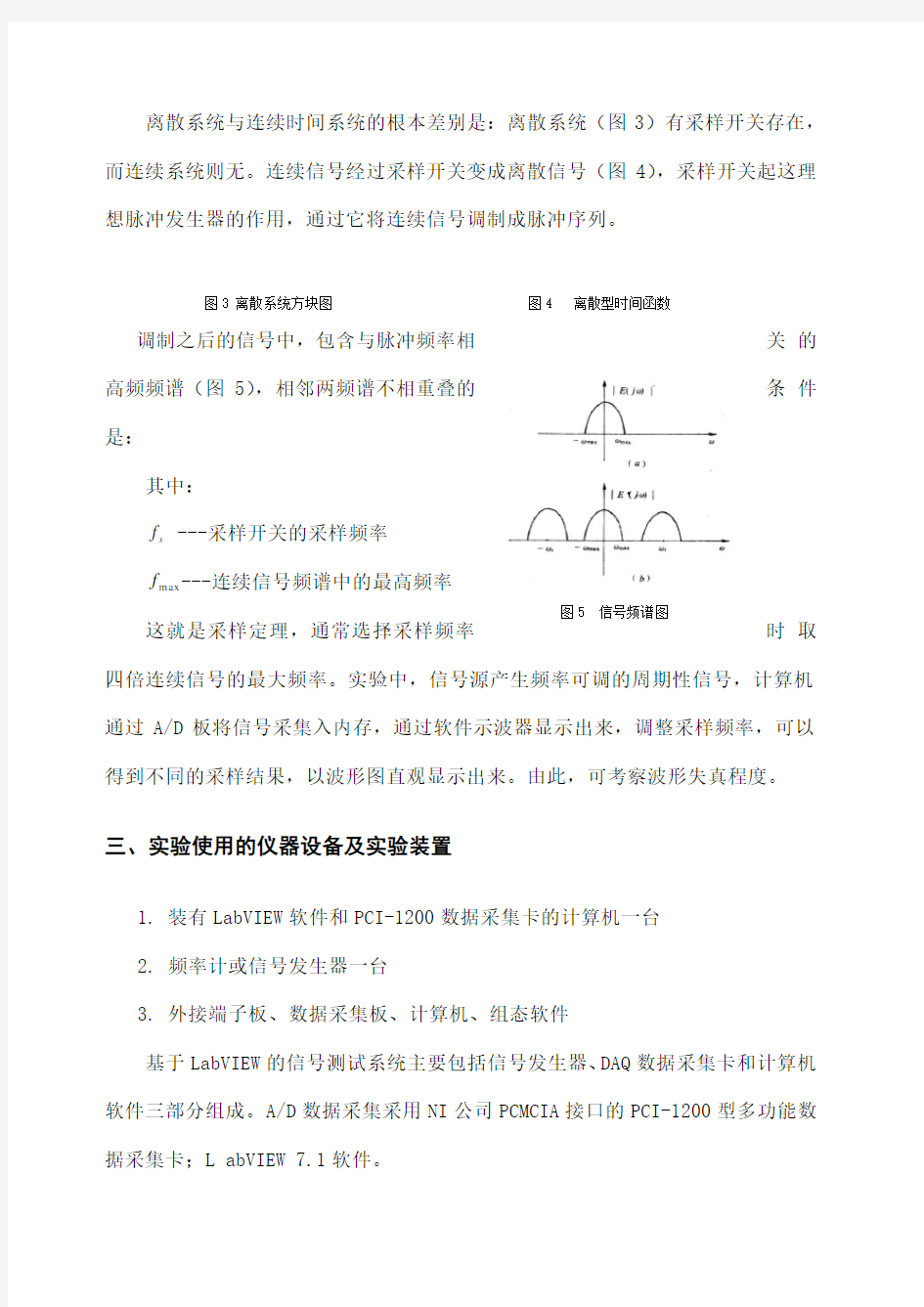
调制之后的信号中,包含与脉冲频率相关的高频频谱(图5),相邻两频谱不相重叠的条件是:
其中:
f ---采样开关的采样频率
s
f---连续信号频谱中的最高频率
m ax
图5 信号频谱图
这就是采样定理,通常选择采样频率时取四倍连续信号的最大频率。实验中,信号源产生频率可调的周期性信号,计算机通过A/D板将信号采集入内存,通过软件示波器显示出来,调整采样频率,可以得到不同的采样结果,以波形图直观显示出来。由此,可考察波形失真程度。
三、实验使用的仪器设备及实验装置
1.装有LabVIEW软件和PCI-1200数据采集卡的计算机一台
2.频率计或信号发生器一台
3.外接端子板、数据采集板、计算机、组态软件
基于LabVIEW的信号测试系统主要包括信号发生器、DAQ数据采集卡和计算机软件三部分组成。A/D数据采集采用NI公司PCMCIA接口的PCI-1200型多功能数据采集卡;L abVIEW 7.1软件。
将
PCI-1200
数据采集
卡插到计算机主板
上的
一个空闲的PCI 插槽中,接好各种附件,其驱动程序就是NI-DAQ 。附件包括一条50芯的数据线,一个型号为CB-50LP 的转接板,转接板直接与外部信号连接。
四、具体实验步骤
(一)通过LabVIEW 进行模拟信号的数据采集
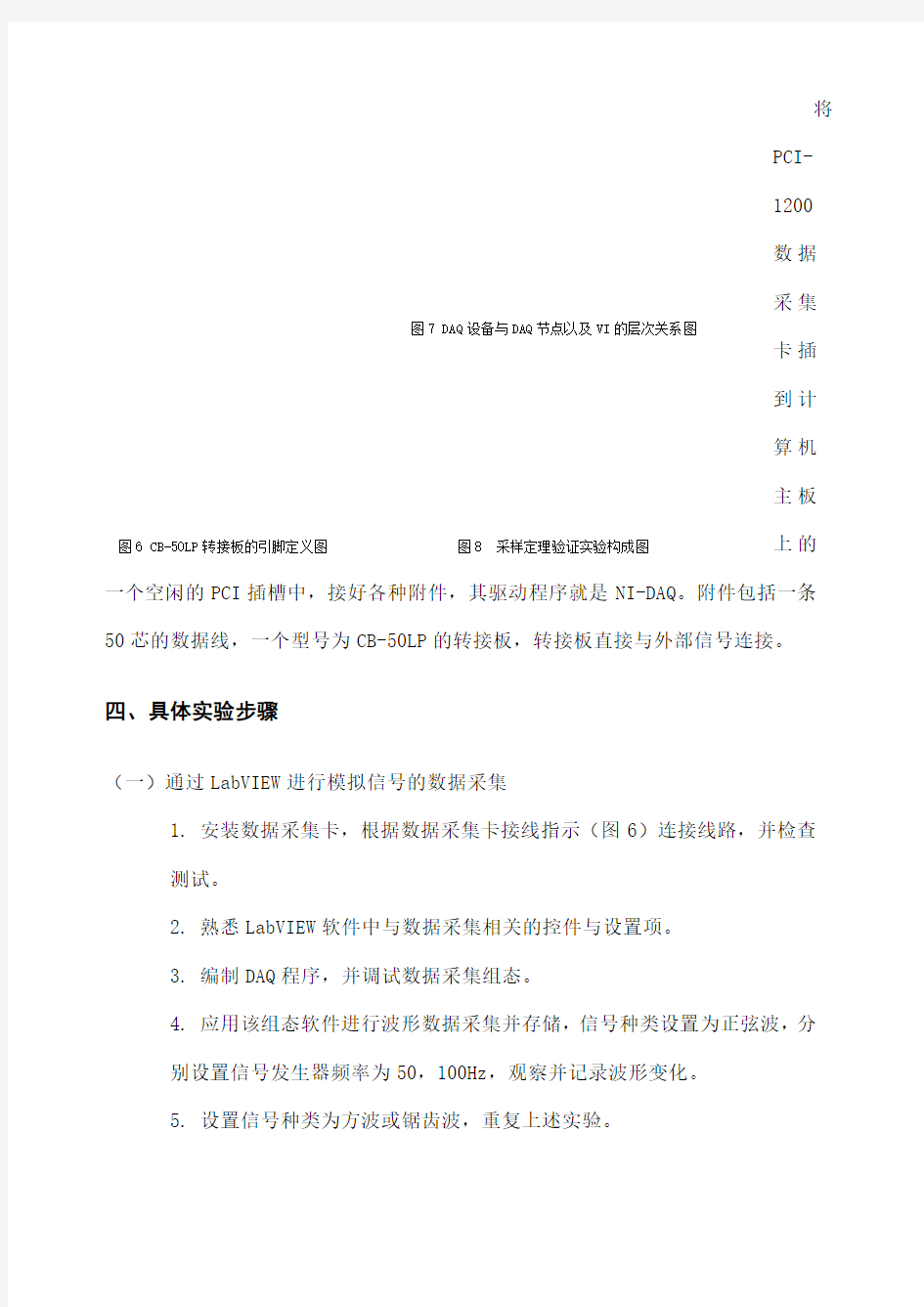
1. 安装数据采集卡,根据数据采集卡接线指示(图6)连接线路,并检查测试。
2. 熟悉LabVIEW 软件中与数据采集相关的控件与设置项。
3. 编制DAQ 程序,并调试数据采集组态。
4. 应用该组态软件进行波形数据采集并存储,信号种类设置为正弦波,分别设置信号发生器频率为50,100Hz ,观察并记录波形变化。
5. 设置信号种类为方波或锯齿波,重复上述实验。
图7 DAQ 设备与DAQ 节点以及VI 的层次关系图
图6 CB-50LP 转接板的引脚定义图 图8 采样定理验证实验构成图
(二)采样定理验证实验
1. 按图8连接线路,并检查测试。
2. 熟悉 GeniDAQ软件中与数据采集相关的控件与设置项。
3. 编制、调试数据采集组态。
4. 应用该组态软件进行波形数据采集并存储,信号种类设置为正弦波,分
别设置信号发生器频率为50,100Hz,采集频率设置为50、100、150、200、300、500Hz,观察并记录波形变化,体验采样定理的正确性。
五、实验准备及预习要求
1.认真阅读实验指导书,在老师答疑和同学讨论的基础上,完成实验准备任务:
1).了解数据采集及其硬件(A/D变换器和数据采集卡)选择的基本知识;
2).熟悉G语言编程环境和虚拟仪器的含义;
1.理解采样定理的意义;
2.实验前可以参考的书籍:《现代测试技术与数据处理》、《LabVIEW7.1测试技术
与仪器应用》等。
六、实验报告内容及格式
1.实验目的
2.实验内容
3.实验装置
4.实验原理(测试实验系统图)
5.实验步骤
6.实验结果与分析(包括实验数据、处理图形、主要关系式和有关程序)
7.思考题解析
七、开课教师及联系方式
开课教师:刘艳明伍耐明
“振动测量和轴系动平衡实验”教学实验指导书
教学实验编号: 041701-3 (可不填)
教学实验名称:振动测量和轴系动平衡实验(中文)
Oscillation Measurement and Shafting Inertia Balance (英文)学分/学时:1学分/16学时
适用专业:发动机、工程热物理、宇航、气动、汽车专业
先修课程和环节:了解振动测量的基本原理;振动传感器(位移,速度,加速度)的工作原理;振动信号的描述;机械振动基本参量的常用测量方
法。
一、实验目的
1、掌握刚性转子现场动平衡的基本作业;
2、掌握有关测量仪器的使用;
3、通过实验了解动静法的工程应用。
二、实验内容及基本原理
实验内容即是对一多圆盘刚性转子用两平面影响系数法进行动平衡。
工作转速低于最低阶段临界转速的转子称为刚性转子,反之称为柔性转子。本实验采取一种刚性转子动平衡常用的方法――两平面影响系数法。该方法无需专用平衡机,只要一般的振动测量,适合在转子工作现场进行平衡作业。
根
据理
图一
论力
学的动静法原理:一匀速旋转的长转子,其连续分布的离心惯性力系可向质心C 简化为一个合力(主向量)R 和一个合力偶Mc (主矩),见图一。如果转子的质心恰在转轴上,且转轴恰好是转子的惯性主轴,则合力R 和合力偶矩Mc 的值均为零,这种情况称转子是平衡的;反之,不满足上述条件的转子是不平衡的。不平衡转子的轴承与轴颈之间产生交变的作用力和反作用力,可引起轴承座和转轴本身的强烈振动,从而影响机器的工作性能和工作寿命。
刚性转子动平衡的目标是,使离心惯性力的合力和合力偶矩的值趋近于零。为此,我们可以在转子上任意选定两个截面Ⅰ,Ⅱ――称校正平面,在离轴心一定距离1r ,2r ――称校正半径,与转子上某一参考标记成夹角1θ和1θ处,分别附加一块质量为1m 、2m 重块――称校正质量。如能使两个质量1m 和2m 的离心惯性力(其大小分别为211m ωr 和222m ωr ,ω为转动角速度)的合力和合力偶正好与原不平衡转子的离心惯性力相平衡,那么就实现了刚性转子的动平衡。
两平面影响系数法的过程如下:
1) 在额定的工作转速或任选的平衡转速下,检测原始不平衡引起轴承或轴颈
A 、
B 在
某方位的振动动量11010V ψ<=V 和22020V ψ<=V ,其中10V 和20V 是振动位移,速度或加速度的幅值,1ψ和2ψ是振动信号对转子上参考标记有关的参考脉冲的相位角。
2) 根据转子的结构,选定年两个校正平面Ⅰ、Ⅱ,并确定校正半径1r 、2r ,
现在平面
Ⅰ上加一试重111Q β<=t m ,其中11Q m t =为试重质量,1β为试重相对参考标记的方位角,以顺转向为正。在相同转速下测量轴承A 、B 的振动量11V 和21V 。
矢量关系见图二a 、b 。显然,矢量11V ~10V 及21V ~20V 。为平面Ⅰ上加试重1Q 所引
起的轴承振动的变化,称为试重1Q 的效果矢量。方位角为零度的单位试重的效果矢量称为影响系数。因而,我们可以由下面式子求影响系数:
3) 取走1Q ,在平面上加试重222Q β<=t m ,22Q m t =为试重质量,2β为试重
方
位角。同样测得轴承A 、B 的振动量12V 和22V ,从而求得效果矢量12V ~10V 和22V ~
20V (见图二c 、d )及影响系数:
4) 校
正平
面Ⅰ、Ⅱ上所需的校正量111P θ<=m 和222P θ<=m ,可通过解矢量方程
组求得: 或
11m P =、22m P =为校正质量,1θ,2θ为校正方向角。
求解矢量方程组最好是使用计算机。要求自编计算机两平面影响系数法动平衡实用程 序。
5) 根据计算结果,在转子上安装校正质量,重新启动转子,如振动已减小到满意程度,
则平衡结束,否则可重复上面步骤,再进行一次修正平衡。
图 二
三、实验使用的仪器设备及实验装置
测试系统如图三所示。
1、转子系统
转子轴上固定有四个圆盘,两端用含油轴承支承。电动机通过橡胶软管拖动
r,远低于转子――轴承转轴,用自耦调压器调节转速。最高工作转速为4000
min
系统得固有频率。
2、电涡流位移计及ST-5000A型动平衡仪
电涡流位移计包括探头和前置器。探头前端有一扁型线圈,由前置器提供高频(2MHz)电流。当它靠近金属导体测量对象时,后者表面产生感应电涡流。间隙变化,电涡流的强弱随之变化,线圈的供电电流也发生变化,从而再串连于线圈的电容上产生被调制的电压信号,此信号经过前置器的调节、检波、放大,成为在一定范围内与间隙大小成比例的直流或低频交流电压信号。本实验使用两个电涡流计,分别检测两个轴承座的水平振动位移。两路位移信号通过切换开关依次馈入动平衡仪,以光电变换器给出的电脉冲为参考,进行同频检测(滤除谐波干扰)和相位比较后,在动平衡仪面板上数显出振动位移的幅值、相位及转速数据。
同频检测前后的振动位移波形,通过电子示波器随时观察。
图三
3、精密天平
用以测量平衡加重的质量
4、用电表
用以调整电涡流探头的安装位置(初始间隙)。
四、具体实验步骤
1、按图三所示连接测试仪器及传感器。
2、打开平衡仪和示波器电源,预热2分钟。
3、转速传感器杆头调整:适当调整传感头端面与标志块(凹块)之间的距离,同时观察转速显示窗口下方的指示灯以表示绿色“OK ”灯亮,红色不亮为最佳位置,绿色灯灭为太远,调整时注意凹块不处在传感器的端面为合适。
4、 调整两个电涡流探头的位置,使其前端距离轴承座测量表面约1mm ,这时用万用表
测量前置器的输出,应约为-8.0V ,因该电涡流位移的灵敏度为8.0mm V ,线性范围0~2mm 。
5、 转动调压器旋钮,启动转子,供电电压可从零快速调到120V 左右,待转子已启动
后,再退回到80V 左右,以获得较慢转速。
6、 用调压器慢慢升速。从动平衡仪上观察转速、振幅、相位度数的变化。在转速从
2000min r 至3000min r 之间,选择一比较稳定的转速b n ,并使其稳定不变。从动平衡仪上分别读出转子原始不平衡引起左(A )、右(B )轴承座振动位移的幅值和相位角110V ψ<及220V ψ<。
7、 转速回零。在平面(号圆盘)上任选方位加一试重1m t 。记录1m t 的值(用天平测
量,可取其在5~8克),及固定点的相位角(以凹面边缘为准作为参考标记算起。顺转向为正)。
8、 启动转子,新调到平衡转速b n ,测出Ⅰ平面加重后,两个轴承座振动位移的幅值
和相位角(11V 和21V )。
9、 转速回零。在Ⅱ平面(4号圆盘)上任选方位加一试重2m t ,拆除2m t 。测量记录
2m t 的值及其固定方位角2β。
10、 转速重新调到b n 。测出Ⅱ平面加试重后,两个轴承座振动位移的幅值和相位角(12V 和22V )。
11、自编程序计算。
12、按11步,求出的平衡质量1m 、2m 及校正相位角1θ、2θ在校正平面Ⅰ,Ⅱ
重新加重。然后将转速调到b n ,再测量记录两个轴承座振动的幅值和相位角。
13、计算平衡率(即平衡前后振动幅值的差与未平衡振幅值的百分比),如高于80%,实验可结束。否则应寻找平衡效果不良原因重做。
14、停机,关掉电源。拆除电源。拆除平衡质量,使转子系统复原。
五、实验准备及预习要求
认真阅读本实验指导书,必要时预先到实验室看看实验装置和测量仪器,对照仪器阅读ST-5000A 型多功能性柔性转子实验台实验系统使用说明书,学会操作使用本仪器,并请求有关教师答疑或学生自行讨论。
六、实验报告内容及格式
实验报告内容要求:
1.写出实验目的、内容、装置及步骤。
2.实验记录和计算结果整理成表格,格式可参考附录一。
3.分析讨论实验方法及实验结果。
4.*参考图二,画出实验测试数据的矢量关系图。
5.画出实验装置系统图。
6.*自编一套应用程序。把本实验的数据输入自编程序,求解出校正量。
实验报告格式如下:
1、实验目的
2、实验内容
3、实验装置
4、实验原理(测试实验系统图)
5、实验步骤
6、实验结果与分析(包括实验数据、处理图形、主要关系式和有关程序)
7、思考题解析
七、开课教师及联系方式
附录:
r,实验日期:实验数据表(供参考)平衡转速n=2750
min
10
1
101V V V -=
η ; 20
2
202V V V -=
η
实验五实验报告 实验名称:离散时间系统特性分析
一、实验目的: 1 。深入理解单位样值响应,离散系统的频率响应的概念; 2。 掌握通过计算机进行求得离散系统的单位样值响应,以及离散系统的频率 响应的方法。 二、实验原理: 对于离散系统的单位样值而言,在实际处理过程中,不可能选取无穷多项的取值。往往是选取有限项的取值,当然这里会产生一个截尾误差,但只要这个误差在相对小一个范围里,可以忽略不计。 另外,在一些实际的离散系统中,往往不是事先就能得到描述系统的差分方程的,而是通过得到系统的某些相应值,则此时系统的分析就需借助计算机的数值处理来进行,得到描述系统的某些特征,甚至进而得到描述系统的数学模型。 本实验首先给出描述系统的差分方程,通过迭代的方法求得系统的单位样值响应,进而求得该离散系统的频率响应。限于试验条件,虽然给出了系统方程,但处理的方法依然具有同样的实际意义。 具体的方法是: 1 在给定系统方程的条件下,选取激励信号为δ(n),系统的起始状态为零 状态,通过迭代法,求得系统的单位样值响应h(n)(n=0,…,N )。 2 利用公式 其中Ω的取值范围为0~2π 。计算系统的频率响应。 三、实验内容 1 已知系统的差分方程为 利用迭代法求得系统的单位样值响应,取N =10。 2 利用公式 其中
#include
实验四 离散时间LTI 系统分析 实验目的 ● 学会运用MATLAB 求解离散时间系统的零状态响应; ● 学会运用MATLAB 求解离散时间系统的单位冲激响应; ● 学会运用MATLAB 求解离散时间系统的卷积和。 ● 学会运用MATLAB 求离散时间信号的z 变换和z 反变换; ● 学会运用MATLAB 分析离散时间系统的系统函数的零极点; ● 学会运用MATLAB 分析系统函数的零极点分布与其时域特性的关系; ● 学会运用MATLAB 进行离散时间系统的频率特性分析。 实验原理及实例分析 1 离散时间系统的响应 离散时间LTI 系统可用线性常系数差分方程来描述,即 ∑∑==-=-M j j N i i j n x b i n y a 0 )()( (1) 其中,i a (0=i ,1,…,N )和j b (0=j ,1,…,M )为实常数。 MATLAB 中函数filter 可对式(1)的差分方程在指定时间范围内的输入序列所产生的响应进行求解。函数filter 的语句格式为 y=filter(b,a,x) 其中,x 为输入的离散序列;y 为输出的离散序列;y 的长度与x 的长度一样;b 与a 分别为差分方程右端与左端的系数向量。 【实例1】 已知某LTI 系统的差分方程为 )1(2)()2(2)1(4)(3-+=-+--n x n x n y n y n y 试用MATLAB 命令绘出当激励信号为)()2/1()(n u n x n =时,该系统的零状态响应。 解:MATLAB 源程序为 >>a=[3 -4 2]; >>b=[1 2]; >>n=0:30; >>x=(1/2).^n; >>y=filter(b,a,x); >>stem(n,y,'fill'),grid on
实验三 离散时间系统的时域分析 1.实验目的 (1)理解离散时间信号的系统及其特性。 (2)对简单的离散时间系统进行分析,研究其时域特性。 (3)利用MATLAB对离散时间系统进行仿真,观察结果,理解其时域特性。 2.实验原理 离散时间系统,主要是用于处理离散时间信号的系统,即是将输入信号映射成的输出的某种运算,系统的框图如图所示: (1)线性系统 线性系统就是满足叠加原理的系统。如果对于一个离散系统输入信号为时,输出信号分别为,即:。 而且当该系统的输入信号为时,其中a,b为任意常数,输出为,则该系统就是一个线性离散时间系统。 (2)时不变系统 如果系统的响应与激励加于系统的时刻无关,则该系统是时不变系统。对于一个离散时间系统,若输入,产生输出为,则输入为,产生输出为,即: 若,则。 通常我们研究的是线性时不变离散系统。 3.实验内容及其步骤 (1)复习离散时间系统的主要性质,掌握其原理和意义。 (2)一个简单的非线性离散时间系统的仿真 系统方程为: x = cos(2*pi*0.05*n); x1[n] = x[n+1] x2[n] = x[n] x3[n] = x[n-1] y = x2.*x2-x1.*x3; 或者:y=x*x- x[n+1]* x[n-1] 是非线性。 参考:% Generate a sinusoidal input signal clf; n = 0:200; x = cos(2*pi*0.05*n); % Compute the output signal x1 = [x 0 0]; % x1[n] = x[n+1] x2 = [0 x 0]; % x2[n] = x[n] x3 = [0 0 x]; % x3[n] = x[n-1]
离散时间信号的产生及信号的卷积和运算 实验报告 班级:___________ 姓名:__________ 学号:____________ 一、实验目的和原理 实验原理: (一)DTFT 和DFT 的定义及其相互关系: 序列x[n] 的DTFT 定义:∑=∞ -∞ =-n jn ωj ω x[n]e )X(e 它是关于自变量ω的复函数,且是以π2为周期的连续函数。)X(e j ω 可以表示为: )(e jX )(e X )X(e j ωim j ωre j ω+= 其中,)(e X j ω re 和)(e X j ωim 分别是)X(e j ω的实部和虚部;还可以表示为: )(ωj j ωj ωe )X(e )X(e θ= 其中,)X(e j ω 和}arg{)()X(e j ω=ωθ分别是)X(e j ω的幅度函数和相位函数; 它们都是ω的实函数,也是以π2为周期的周期函数。 序列x[n]的N 点DFT 定义: ∑∑-=-=-===10 1 22][][)(][N n kn N N n kn N j k N j W n x e n x e X k X ππ ][k X 是周期为N 的序列。 )X(e j ω与][k X 的关系:][k X 是对)X(e j ω在一个周期中的谱的等间隔N 点采样,即: k N j ω)X(e k X πω2| ][= =, 而)X(e j ω 可以通过对][k X 内插获得,即:
]2/)1)][(/2([1 ) 22sin() 22sin( ] [1----=?--= ∑N N k j N k j ω e N k N k N k X N )X(e πωπωπω (二) 线性时不变离散时间系统的变换域表示: LTI 离散时间系统的时域差分方程为: ∑∑==-=-M k k N k k k n x p k n y d )()( (1) 传递函数: 对上面的差分方程两边求z 变换,得: ∑∑∑∑=-=-=-=-=? =N k k k M k k k M k k k N k k k z d z p z X z Y z p z X z d z Y 0 00 ) () ()()( 我们定义LTI 离散时间系统的输出的Z 变换Y(z)与输入的Z 变换X(z)的比值为该系统的传递函数,即) () ()(z X z Y z H = 为系统的传递函数。 N N M M z d z d d z p z p p z D z p z H ----++++++= =......)()()(110110 分解因式 ∏-∏-=∑∑= =-=-=-=-N i i M i i N i i k M i i k z z K z d z p z H 11 11 0)1()1()(λξ ,其中i ξ和i λ称为零、极点。 利用系统的传递函数)(z H ,我们可以分析系统的零极点,稳定性及实现结构等特点。 (2) 频率响应: 因为大多数离散时间信号都可以分解为n j e ω的线性组合,所以研究输入n j e ω-的响应具有极大的意义,即当输入为n j e n x ω=][时,输出为: )()()(][) (ωωωωωj n j m m j n j m n j m e H e e m h e e m h n y === ∑∑∞ -∞ =--∞ -∞ = 这里,∑∞-∞ =-= n n j j e n h e H ωω )()(是h(n)的DTFT ,称为LTI 离散时间系统的频率
实验二 离散控制系统分析方法 一、实验目的 利用MATLAB 对各种离散控制系统进行时域分析。 二、实验指导 1.控制系统的稳定性分析 由前面章节学习的内容可知,对线性系统而言,如果一个连续系统的所有极点都位于s 平面的左半平面,则该系统是一个稳定系统。对离散系统而言,如果一个系统的全部极点都位于z 平面的单位圆内部,则该系统是一个稳定系统。一个连续的稳定系统,如果所有的零点都位于s 平面的左半平面,即所有零点的实部小于零,则该系统是一个最小相位系统。一个离散的稳定系统,如果所有零点都位于z 平面的单位圆内,则称该系统是一个最小相位系统。由于Matlab 提供了函数可以直接求出控制系统的零极点,所以使用Matlab 判断一个系统是否为最小相位系统的工作就变得十分简单。 2.控制系统的时域分析 时域分析是直接在时间域对系统进行分析。它是在一定输入作用下,求得输出量的时域表达式,从而分析系统的稳定性、动态性能和稳态误差。这是一种既直观又准确的方法。 Matlab 提供了大量对控制系统的时域特征进行分析的函数,适用于用传递函数表示的模型。其中常用的函数列入表1,供学生参考。 例1.z z z H 5.05 .1)(2+= 试绘出其单位阶跃响应及单位斜波输入响应。 解:为求其单位阶跃响应及单位斜波输入响应,编制程序如下: num=[1.5]; den=[1 0.5 0];sysd=tf(num,den,0.1) [y,t,x]=step(sysd);
subplot(1,2,1) plot(t,y); xlabel('Time-Sec'); ylabel('y(t)'); gtext('单位阶跃响应') grid; u=0:0.1:1; subplot(1,2,2) [y1,x]=dlsim(num,den,u); plot(u,y1) xlabel('Time-Sec'); ylabel('y(t)'); gtext('单位速度响应') grid 二、实验内容 1、MATLAB在离散系统的分析应用 对于下图所示的计算机控制系统结构图1,已知系统采样周期为T=0.1s,被 控对象的传递函数为 2 () s(0.11)(0.05s1) G s s = ++ ,数字控制器 0.36 () 0.98 z D z z - = + ,试 求该系统的闭环脉冲传递函数和单位阶跃响应。 图1 计算机控制系统结构图 实验步骤: 1).求解开环脉冲传递函数,运用下面的matlab语句实现:>> T=0.1; >> sys=tf([2],[0.005 0.15 1 0]); %将传函分母展开>> sys1=c2d(sys,T,'zoh'); >> sys2=tf([1 -0.36],[1 0.98],0.1); >> sys3=series(sys2,sys1) 执行语句后,屏幕上显示系统的开环脉冲传递函数为: sys3 = 0.03362 z^3 + 0.05605 z^2 - 0.01699 z - 0.002717 --------------------------------------------------
实验二 连续和离散时间LTI 系统的响应及卷积 一、实验目的 掌握利用Matlab 工具箱求解连续时间系统的冲激响应、阶跃响应,离散时间系统的单位样值响应,理解卷积概念。 二、实验内容 1、连续时间系统的冲击响应、阶跃响应 a. 利用impulse 函数画出教材P44例2-15: LTI 系统 ()3()2()dy t y t x t dt +=的冲击响应的波形。 a=[ 1 3]; >> b=[2]; >> impulse(b,a); b. 利用step 函数画出教材P45例2-17: LTI 系统 1''()3'()2()'()2()2 y t y t y t x t x t ++=+的阶跃响应的波形。 a=[1 3 2]; >> b=[0.5 2]; >> step(b,a)
2、离散时间系统的单位样值响应 利用impz函数画出教材P48例2-21: --+---=的单位样值响应的图形。 []3[1]3[2][3][] y n y n y n y n x n a=[1 -3 3 -1]; >> b=[1]; >> impz(b,a) 3、连续时间信号卷积 画出函数f1(t)=(1+t)[u(t)-u(t-1)]和f2(t)=u(t-1)-u(t-2)的图形,并利用附在后面的sconv.m函数画出卷积积分f1(t)* f2(t)图形。 t=-1:0.01:3; f1=(1+t).*(0.5*sign(t)-0.5*sign(t-1));
f2=(0.5*sign(t-1)-0.5*sign(t-2)); subplot(2,2,1); plot(t,f1); subplot(2,2,2); plot(t,f2); sconv(f1,f2,t,t,0.01); 4、画出教材P60例2-28中h[n]、x[n]的图形(图2-14(a)(b)),并利用conv函数求出 卷积x[n]*h[n]并画出图形(图2-14(f))。 n=0:10; x1=[zeros(1,0),1,zeros(1,10)]+[zeros(1,1),1,zeros(1,9)]+[zeros(1,2),1,zeros(1,8)]; >> stem(n,x1);
第七章离散时间系统的时域分析 §7-1 概述 一、离散时间信号与离散时间系统 离散时间信号:只在某些离散的时间点上有值的 信号。 离散时间系统:处理离散时间信号的系统。 混合时间系统:既处理离散时间信号,又处理连 续时间信号的系统。 二、连续信号与离散信号 连续信号可以转换成离散信号,从而可以用离散时间系统(或数字信号处理系统)进行处理: 三、离散信号的表示方法:
1、 时间函数:f(k)<——f(kT),其中k 为序号,相当于时间。 例如:)1.0sin()(k k f = 2、 (有序)数列:将离散信号的数值按顺序排列起来。例如: f(k)={1,0.5,0.25,0.125,……,} 时间函数可以表达任意长(可能是无限长)的离散信号,可以表达单边或双边信号,但是在很多情况下难于得到;数列的方法表示比较简单,直观,但是只能表示有始、有限长度的信号。 四、典型的离散时间信号 1、 单位样值函数:? ??==其它001)(k k δ 下图表示了)(n k ?δ的波形。
这个函数与连续时间信号中的冲激函数 )(t δ相似,也有着与其相似的性质。例如: )()0()()(k f k k f δδ=, )()()()(000k k k f k k k f ?=?δδ。 2、 单位阶跃函数:? ??≥=其它001)(k k ε 这个函数与连续时间信号中的阶跃函数)(t ε相似。用它可以产生(或表示)单边信号(这里称为单边序列)。 3、 单边指数序列:)(k a k ε
比较:单边连续指数信号:)()()(t e t e t a at εε=,其 底一定大于零,不会出现负数。 (a) 0.9a = (d) 0.9a =? (b) 1a = (e) 1a =? (c) 1.1a = (f) 1.1a =?
课程设计报告 课程设计题目:离散时间系统分析学号:201420130206 学生姓名:董晓勇 专业:通信工程 班级:1421301 指导教师:涂其远 2015年12月18日
离散时间系统的分析 一、设计目的和意义 1 . 目的: (1)深刻理解卷积和、相加、相乘运算,掌握求离散序列卷积和、相加相乘的计算方法;(2)加深理解和掌握求离散序列Z变换的方法; (3)加深和掌握离散系统的系统函数零点、函数极点和系统时域特性、系统稳定性的关系。 2 . 意义: 在对《信号与系统》一书的学习中,进行信号与系统的分析是具有十分重要的意义,同时也是必不可少的。利用matlab函数,只需要简单的编程,就可以实现系统的时域、频域分析,对系统特性进行分析,为实际的系统设计奠定了基础。本设计在离散系统Z域分析理论的基础上,利用matlab对离散系统的稳定性和频域响应进行了分析。 二、设计原理
第一部分:对离散时间系统的时域进行分析呈 对离散时间信号的代数运算(相加、相乘、卷积和),是在时域进行分析。相加用“+”来完成,相乘用“·*”来完成,卷积和则用conv 函数来实现,具体形式为y=conv(x1,x2,….),其中x1,x2,…..为输入的离散序列 ,y 为输出变量。 在零初始状态下,matlab 控制工具箱提供了一个filter 函数,可以计算差分方程描述的系统的响应,其调用形式为: y=filter(b,a,f) 其中,a=[a0,a1,a2,…]、b=[b0,b1,b2,….]分别是系统方程左、右边的系数向量,f 表示输入向量,y 表示输出向量。 第二部分:对离散时间系统的Z 域进行分析 matlab 工具箱提供了计算Z 正变换的函数ztrans,其调用形式为: F=zrtans(f) %求符号函数f 的Z 变换,返回函数的自变量为z 。 Matlab 的zplane 函数用于系统函数的零极点图的绘制,调用方式为: zplane(b,a)其中,b 、a 分别为系统函数分子、分母多项式的系数向量。 matlab 中,利用freqz() 函数可方便地求得系统的频率响应,调用格式为: freqz(b,a,N) 该调用方式将绘制系统在0~PI 范围内N 个频率等分点的幅频特性和相频特性图。 三、 详细设计步骤 1.自己设计两个离散时间序列x1、x2,对其进行相加,相乘,卷积运算,并显示出图形。 2.根据已知的LTI 系统:y[n]-0.7y[n-1]-0.6y[n-2]+y[n-3]=x[n]+0.5[n-1],得其在Z 域输 入输出的传递函数为: 1 12310.5()10.70.6z H z z z z ----+= --+ 利用matlab 求:(1)系统函数的零点和极点,并在z 平面显示他们的分布;(2)画出幅频响应和相频响应的特性曲线。 四、 设计结果及分析 (1).自行设计产生两个离散序列信号,对其进行相加、乘及卷积运算
实验一连续与离散系统分析 一、实验目得 学习连续系统与离散系统响应得matlab求解方法; 二、实验主要仪器设备与材料 计算机 三、实验方法、步骤及结果测试 实验方法:编程,上机调试,分析实验结果; 步骤: 编程实现上述各实验内容 四、实验结果 1、某系统得传递函数为: 试求系统得冲激响应与阶跃响应。 2、编制程序求解下列两个系统得单位冲激响应与阶跃响应,并绘出其图形。要求
分别用filter、conv、impz三种函数完成。给出理论计算结果与程序计算结果并讨论。 (I) 理论计算结果: 程序计算结果: A:单位冲激响应 (1)用Filter函数(2)用Conv函数 (3)用impz函数 单位冲激响应: n 0 1 2 3 4 5 h(n) 1 -1、75 1、19 -0、67 0、355 -0、18 单位阶跃响应: n 0 1 2 3 4 5 y(n) 1 -0、75 0、44 -0、234 0、12 -0、06
B:单位阶跃响应(1)用Fil ter 函数 (2)用Conv 函数 (3)用Imp z函数 (II ) 理论计算结果: 程序计算结果: A:单位冲激响应(1)用f ilter 函数 单位冲激响应: n 0 1 2 3 4 5 h(n) 0 0、25 0、25 0、25 0、25 单位阶跃响应: N 0 1 2 3 4 5 y(n) 0 0、25 0、5 0、75 1 1
(2)用Conv函数 (3)用Impz函数 B:单位阶跃响应 (1)用filter函数 (2)用Conv函数 (3)用Impz函数
实验七 离散系统分析的MATLAB 实现 一、实验目的 1、掌握利用MATLAB 绘制系统零极点图的方法; 2、掌握离散时间系统的零极点分析方法; 3、学习离散系统响应的MATLAB 求解方法; 4、掌握用MATALB 实现离散系统频率特性分析的方法; 5、深刻理解离散系统的系统函数零极点对系统频响的影响,可以根据 零极点知识设计简单的滤波器。 二、基本原理 (一)离散系统零极点 线性时不变离散系统可用线性常系数差分方程描述,即 ()()N M i j i j a y n i b x n j ==-=-∑∑ (1) 其中()y k 为系统的输出序列,()x k 为输入序列。 将式(1)两边进行Z 变换, 00 () () ()() () M j j j N i i i b z Y z B z H z X z A z a z -=-== == ∑∑ (2) 将式(2)因式分解后有: 11 () ()() M j j N i i z q H z C z p ==-=-∏∏ (3) 其中C 为常数,(1,2,,)j q j M =L 为()H z 的M 个零点,(1,2,,)i p i N =L 为()H z 的 N 个极点。 系统函数()H z 的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。 (二)离散系统零极点图及零极点分析 1、零极点图的绘制 设离散系统的系统函数为 () ()() B z H z A z =
则系统的零极点可用MATLAB 的多项式求根函数roots()来实现,调用格式为: p=roots(A) 其中A 为待求根多项式的系数构成的行矩阵,返回向量p 则是包含多项式所有根的列向量。如多项式为231 ()48 B z z z =+ +,则求该多项式根的MATLAB 命令为为: A=[1 3/4 1/8]; P=roots(A) 运行结果为: P = -0.5000 -0.2500 需注意的是,在求系统函数零极点时,系统函数可能有两种形式:一种是分子、分母多项式均按z 的降幂次序排列;另一种是分子、分母多项式均按1z -的升幂次序排列。这两种方式在构造多项式系数向量时稍有不同。 (1)()H z 按z 的降幂次序排列:系数向量一定要由多项式最高次幂开始,一直到常数项,缺项要用0补齐。如 34322()3221 z z H z z z z z +=++++ 其分子、分母多项式系数向量分别为A=[1 0 2 0]、B=[1 3 2 2 1]。 (2)()H z 按1z -的升幂次序排列:分子和分母多项式系数向量的维数一定要相同,不足的要用0补齐,否则0z =的零点或极点就可能被漏掉。如 1 1212()11124 z H z z z ---+=++ 其分子、分母多项式系数向量分别为A=[1 2 0]、B=[1 1/2 1/4]。 用roots()求得()H z 的零极点后,就可以用plot()函数绘制出系统的零极点图。下面是求系统零极点,并绘制其零极点图的MATLAB 实用函数ljdt(),同时还绘 制出了单位圆。函数ljdt()的程序如下: function ljdt(A,B) % The function to draw the pole-zero diagram for discrete system p=roots(A) %求系统极点 q=roots(B) %求系统零点 p=p'; %将极点列向量转置为行向量 q=q'; %将零点列向量转置为行向量 x=max(abs([p q 1])); %确定纵坐标范围
实验:离散时间信号与系统的时域分析 一、实验目的 1、熟悉和掌握常用的用于信号与系统时域仿真分析的MA TLAB函数; 2、掌握离散时间信号的MATLAB产生,掌握用周期延拓的方法将一个非周期信号进行周期信号延拓形成一个周期信号的MA TLAB编程; 3、牢固掌握系统的单位序列响应的概念,掌握MATLAB描述LTI系统的常用方法及有关函数,并学会利用MATLAB求解LTI系统响应,绘制相应曲线。 基本要求:掌握用MATLAB描述离散时间信号的方法,能够编写MATLAB程序,实现各种信号的时域变换和运算,并且以图形的方式再现各种信号的波形。掌握线性时不变离散系统的时域数学模型用MATLAB描述的方法,掌握线性常系数差分方程的求解编程。 二、实验原理 信号(Signal)一般都是随某一个或某几个独立变量的变化而变化的,例如,温度、压力、声音,还有股票市场的日收盘指数等,这些信号都是随时间的变化而变化的,还有一些信号,例如在研究地球结构时,地下某处的密度就是随着海拔高度的变化而变化的。一幅图片中的每一个象素点的位置取决于两个坐标轴,即横轴和纵轴,因此,图像信号具有两个或两个以上的独立变量。 在《信号与系统》课程中,我们只关注这种只有一个独立变量(Independent variable)的信号,并且把这个独立变量统称为时间变量(Time variable),不管这个独立变量是否是时间变量。 在自然界中,大多数信号的时间变量都是连续变化的,因此这种信号被称为连续时间信号(Continuous-Time Signals)或模拟信号(Analog Signals),例如前面提到的温度、压力和声音信号就是连续时间信号的例子。但是,还有一些信号的独立时间变量是离散变化的,这种信号称为离散时间信号。前面提到的股票市场的日收盘指数,由于相邻两个交易日的日收盘指数相隔24小时,这意味着日收盘指数的时间变量是不连续的,因此日收盘指数是离散时间信号。 而系统则用于对信号进行运算或处理,或者从信号中提取有用的信息,或者滤出信号中某些无用的成分,如滤波,从而产生人们所希望的新的信号。系统通常是由若干部件或单元组成的一个整体(Entity)。系统可分为很多不同的类型,例如,根据系统所处理的信号的不同,系统可分为连续时间系统(Continuous-time system)和离散时间系统(Discrete-time system),根据系统所具有的不同性质,系统又可分为因果系统(Causal system)和非因果系统(Noncausal system)、稳定系统(Stable system)和不稳定系统(Unstable system)、线性系统(Linear system)和非线性系统(Nonlinear system)、时变系统(Time-variant system)和时不变系统(Time-invariant system)等等。 然而,在信号与系统和数字信号处理中,我们所分析的系统只是所谓的线性时不变系统,这种系统同时满足两个重要的基本性质,那就是线性性和时不变性,通常称为线性时不变(LTI)系统。 1. 信号的时域表示方法 1.1将信号表示成独立时间变量的函数
实验四 离散时间系统的频域分析 1.实验目的 (1)理解和加深傅里叶变换的概念及其性质。 (2)离散时间傅里叶变换(DTFT)的计算和基本性质。 (3)离散傅里叶变换(DFT)的计算和基本性质。 2.实验原理 对离散时间信号进行频域分析,首先要对其进行傅里叶变换,通过得到的频谱函数进行分析。 离散时间傅里叶变换(DTFT ,Discrete-time Fourier Transform)是傅立叶变换的一种。它将以离散时间nT (其中,T 为采样间隔)作为变量的函数(离散时间信号)f (nT )变换到连续的频域,即产生这个离散时间信号的连续频谱()iw F e ,其频谱是连续周期的。 设连续时间信号f (t )的采样信号为:()()()sp n f t t nT f nT d ¥ =-? = -?,并且其傅里叶变 换为:()()(){}sp n iwt f t f nT t nT dt e d ¥ ¥ -? =-? --= ? òF 。 这就是采样序列f(nT)的DTFT::()()iwT inwT DTFT n F e f nT e ¥ -=-? = ?,为了方便,通常将采 样间隔T 归一化,则有:()()iw inw DTFT n F e f n e ¥ -=-? = ?,该式即为信号f(n)的离散时间傅 里叶变换。其逆变换为:()1()2iw DTFT inw F e dw f n e p p p -=ò。 离散傅里叶变换(DFT ,Discrete-time Fourier Transform )是对离散周期信号的一种傅里叶变换,对于长度为有限长信号,则相当于对其周期延拓进行变换。在频域上,DFT 的离散谱是对DTFT 连续谱的等间隔采样。 21 1 20 ()()| ()()DFT k DTFT k w N knT N N i iwT iwnT N n n F w F e f nT e f nT e p p =----==== = 邋 长度为N 的有限长信号x(n),其N 点离散傅里叶变换为: 1 ()[()]()kn N N n X k DFT x n x n W -=== ?。 X(k)的离散傅里叶逆变换为:10 1()[()]()kn N N k x n IDFT X k X k W N --===?。 DTFT 是对任意序列的傅里叶分析,它的频谱是一个连续函数;而DFT 是把有限长序列作为周期序列的一个周期,对有限长序列的傅里叶分析,DFT 的特点是无论在时域还是频域
实验名:离散系统的Z 域分析 一、实验目的 1、掌握离散序列z 变换的计算方法。 2、掌握离散系统系统函数零极点的计算方法和零极点图的绘制方法,并能根据零极点图分析系统的因果性和稳定性。 3、掌握利用MATLAB 进行z 反变换的计算方法。 二、实验原理与计算方法 1、z 变换 离散序列x (n )的z 变换定义为:∑∞ -∞ =-= n n z n x Z X )()(。 在MA TLAB 中可以利用符号表达式计算一个因果序列的z 变换。其命令格式为: syms n; f=(1/2)^n+(1/3)^n; ztrans(f) 2、离散系统的系统函数及因果稳定的系统应满足的条件 一个线性移不变离散系统可以用它的单位抽样响应h (n )来表示其输入与输出关系,即 y (n )= x (n )* h (n ) 对该式两边取z 变换,得: Y (z )= X (z )· H (z ) 则: ) () ()(z X z Y z H = 将H (z )定义为系统函数,它是单位抽样响应h (n )的z 变换,即 ∑∞ -∞ =-= =n n z n h n h Z z H )()]([)( 对于线性移不变系统,若n <0时,h (n )=0,则系统为因果系统;若 ∞<∑∞ -∞ =n n h |)(|,则 系统稳定。由于h (n )为因果序列,所以H (z )的收敛域为收敛圆外部区域,因此H (z )的收敛域为收敛圆外部区域时,系统为因果系统。因为∑∞ -∞ =-= n n z n h z H )()(,若z =1时H (z )收敛,即 ∞<= ∑∞ -∞ ==n z n h z H |)(||)(1,则系统稳定,即H(z)的收敛域包括单位圆时,系统稳定。 因此因果稳定系统应满足的条件为:1,||<∞≤<ααz ,即系统函数H (z )的所有极点全部落在z 平面的单位圆之内。 3、MA TLAB 中系统函数零极点的求法及零极点图的绘制方法 MATLAB 中系统函数的零点和极点可以用多项式求根函数roots ()来实现,调用该函数的命令格式为:p=roots(A)。其中A 为待求根多项式的系数构成的行向量,返回向量p 是包含该多项式所有根位置的列向量。 如:求多项式8 1 43)(2++=z z z A 的根的MA TLAB 命令为: A=[1 3/4 1/8]; p=roots(A) 运行结果为: p= -0.5000 -0.2500 也可以用[z,p,k]=tf2zp(B,A)函数求得。其中z 为由系统的零点构成的向量,p 为由系统的极点构成的向量,k 表示系统的增益;B 、A 分别为系统函数中分子分母多项式的系数向
实验一 离散时间信号与系统分析 一、实验目的 1.掌握离散时间信号与系统的时域分析方法。 2.掌握序列傅氏变换的计算机实现方法,利用序列的傅氏变换对离散信号、系统及系统响应进行频域分析。 3.熟悉理想采样的性质,了解信号采样前后的频谱变化,加深对采样定理的理解。 二、实验原理 1.离散时间系统 一个离散时间系统是将输入序列变换成输出序列的一种运算。若以][?T 来表示这种运算,则一个离散时间系统可由下图来表示: 图 离散时间系统 输出与输入之间关系用下式表示 )]([)(n x T n y = 离散时间系统中最重要、最常用的是线性时不变系统。 2.离散时间系统的单位脉冲响应 设系统输入)()(n n x δ=,系统输出)(n y 的初始状态为零,这是系统输出用)(n h 表示,即)]([)(n T n h δ=,则称)(n h 为系统的单位脉冲响应。 可得到:)()()()()(n h n x m n h m x n y m *=-= ∑∞ -∞= 该式说明线性时不变系统的响应等于输入序列与单位脉冲序列的卷积。 3.连续时间信号的采样 采样是从连续信号到离散时间信号的过渡桥梁,对采样过程的研究不仅可以了解采样前后信号时域何频域特性发生的变化以及信号内容不丢失的条件,而且有助于加深对拉氏变换、傅氏变换、Z 变换和序列傅氏变换之间关系的理解。 对一个连续时间信号进行理想采样的过程可以表示为信号与一个周期冲激脉冲的乘 积,即:)()()(?t t x t x T a a δ=
其中,)(?t x a 是连续信号)(t x a 的理想采样,)(t T δ是周期冲激脉冲 ∑∞ -∞=-= m T mT t t )()(δδ 设模拟信号)(t x a ,冲激函数序列)(t T δ以及抽样信号)(?t x a 的傅立叶变换分别为)(Ωj X a 、)(Ωj M 和)(?Ωj X a ,即 )]([)(t x F j X a a =Ω )]([)(t F j M T δ=Ω )](?[)(?t x F j X a a =Ω 根据连续时间信号与系统中的频域卷积定理,式(2.59)表示的时域相乘,变换到频域为卷积运算,即 )]()([21)(?Ω*Ω=Ωj X j M j X a a π 其中 ?∞ ∞ -Ω-==Ωdt e t x t x F j X t j a a a )()]([)( 由此可以推导出∑∞-∞=Ω-Ω=Ωk s a a jk j X T j X )(1)(? 由上式可知,信号理想采样后的频谱是原来信号频谱的周期延拓,其延拓周期等于采样频率。根据香农定理,如果原信号是带限信号,且采样频率高于原信号最高频率的2倍,则采样后的离散序列不会发生频谱混叠现象。 4.有限长序列的分析 对于长度为N 的有限长序列,我们只观察、分析在某些频率点上的值。 ???-≤≤=n N n n x n x 其它010),()( 一般只需要在π2~0之间均匀的取M 个频率点,计算这些点上的序列傅立叶变换: ∑-=-=1 0)()(N n jn j k k e n x e X ωω 其中,M k k /2πω=,1,,1,0-=M k 。)(ωj e X 是一个复函数,它的模就是幅频特 性曲线。 三、主要实验仪器及材料
实验6 离散时间系统的z 域分析 一、实验目的 1.掌握z 变换及其反变换的定义,并掌握MATLAB 实现方法。 2.学习和掌握离散时间系统系统函数的定义及z 域分析方法。 3.掌握系统零极点的定义,加深理解系统零极点分布与系统特性的关系。 二、实验原理 1. Z 变换 序列x(n)的z 变换定义为 ()()n n X z x n z +∞ -=-∞ = ∑ Z 反变换定义为 1 1 ()()2n r x n X z z dz j π-= ?? 在MATLAB 中,可以采用符号数学工具箱的ztrans 函数和iztrans 函数计算z 变换 和z 反变换: Z=ztrans(F) 求符号表达式F 的z 变换。 F=ilaplace(Z) 求符号表达式Z 的z 反变换。 2.离散时间系统的系统函数 离散时间系统的系统函数H(z)定义为单位抽样响应h(n)的z 变换 ()()n n H z h n z +∞ -=-∞ = ∑ 此外,连续时间系统的系统函数还可以由系统输入和输出信号的z 变换之比得到 ()()/()H z Y z X z = 由上式描述的离散时间系统的系统函数可以表示为 101101()M M N N b b z b z H z a a z a z ----+++= +++…… 3.离散时间系统的零极点分析 离散时间系统的零点和极点分别指使系统函数分子多项式和分母多项式为零的点。在MATLAB 中可以通过函数roots 来求系统函数分子多项式和分母多项式的根,从而得到系统的零极点。 此外,还可以利用MATLAB 的zplane 函数来求解和绘制离散系统的零极点分布图,zplane 函数调用格式为: zplane(b,a) b,a 为系统函数的分子、分母多项式的系数向量(行向量)。 zplane(z,p) z,p 为零极点序列(列向量)。 系统函数是描述系统的重要物理量,研究系统函数的零极点分布不仅可以了解系统单位
实验一、离散时间系统及离散卷积 1、单位脉冲响应 源程序: function pr1() %定义函数pr1 a=[1,-1,0.9]; %定义差分方程y(n)-y(n-1)+0.9y(n-2)=x(n) b=1; x=impseq(0,-20,120); %调用impseq函数(matlab软件的函数库) n=[-20:120]; %定义n的范围,从-20 到120 h=filter(b,a,x); %调用函数给纵坐标赋值 figure(1) %绘图figure 1 (冲激响应) stem(n,h); %在图中绘出冲激 title('单位冲激响应(耿海锋)'); %定义标题为:'冲激响应(耿海锋)' xlabel('n'); %绘图横座标为n ylabel('h(n)'); %绘图纵座标为h(n) figure(2) %绘图figure 2 [z,p,g]=tf2zp(b,a); %绘出零极点图 zplane(z,p) function [x,n]=impseq(n0,n1,n2) %声明impseq函数 n=[n1:n2]; x=[(n-n0)==0]; 结果: Figure 1:
Figure 2:
2、离散系统的幅频、相频的分析 源程序: function pr2() b=[0.0181,0.0543,0.0543,0.0181]; a=[1.000,-1.76,1.1829,-0.2781]; m=0:length(b)-1; % m的范围,从0 到3 l=0:length(a)-1; % l的范围,从0 到3 K=5000; k=1:K; w=pi*k/K; %角频率w H=(b*exp(-j*m'*w))./(a*exp(-j*l'*w));%对系统函数的定义 figure(1) magH=abs(H); %magH为幅度 angH=angle(H); %angH为相位 plot(w/pi,magH-耿海锋); %绘制w(pi)-magH-耿海锋的图形 figure(2) axis([0,1,0,1]); %限制横纵座标从0到1 xlabel('w(pi)'); %x座标为 w(pi) ylabel('|H|'); %y座标为 angle(H)-耿海锋 title('幅度,相位响应(耿海锋)'); %图的标题为:'幅度,相位响应(耿海锋)' plot(w/pi,angH); %绘制w(pi)-angH的图形 grid; %为座标添加名称 xlabel('w(pi)'); %x座标为 w(pi) ylabel('angle(H)'); %y座标为 angle(H) 结果: Figure1
1 判断下列序列是否是周期的,若是周期的,确定其周期。 (1) ??? ??+=53 sin )(x ππn n 解 z k 63 220 ∈===k k k w T ππ 当k=1时,x(n)的最小正周期为6. (2) ??? ??+=541) (πn j e n x 解 z 84 1220 ?===k k k w T πππ x(n)为非周期序列. 2.简述离散时间系统线性,时不变性,因果性,稳定性。 答:线性:满足齐次性和可加性 设y 1(n )=T [x 1(n )], y 2(n )=T [x 2(n )] 对任意常数a,b ,若 T [ax 1(n )+bx 2(n )]=aT [x 1(n )]+bT [x 2(n )] =a y 1(n )+b y 2(n ) 则称T[ ]为线性离散时间系统。 非时变: 设y (n ) = T [x (n )] 对任意整数k ,有 y (n-k )=T [x (n-k )] 稳定性 稳定系统是有界输入产生有界输出的系统,充要条件是 因果性 若系统 n 时刻的输出,只取决于n 时刻以及n 时刻以前的输入序列,而与n 时刻以后的输入无关,则称该系统为因果系统 线性时不变离散系统是因果系统的充要条件: 3傅里叶变换、拉普拉斯变换以及Z 变换的区别与联系。 答:信号与系统的分析方法除时域分析方法以外,还有频域的分析方法。在连续时间信号与系统中,其变换域方法就是拉普拉斯变换与傅里叶变换。在离散时间信号与系统中变换域分析方法是Z 变换法和离散时间傅里叶变换法。Z 变换在离散时间系统中的作用就如同拉普拉∑∑∑=====N k N k N k k k k k k k n y a n x T a n x a T 111 )()]([)]([()00 h n n =
相关主题
文本预览