第32卷第9期 2009年9月
合肥工业大学学报(
自然科学版)
JO U RN AL O F H EFEI U N IV ERSIT Y OF T ECH N OL O GY
Vol.32No.9 Sept.2009
收稿日期:2008 10 15;修改日期:2009 02 24
作者简介:温阳东(1955-),男,安徽合肥人,合肥工业大学教授,硕士生导师.
基于线阵CCD 的智能小车路径识别系统
温阳东, 王祥好
(合肥工业大学电气与自动化工程学院,安徽合肥 230009)
摘 要:文章介绍了一种基于飞思卡尔HCS12单片机的智能车路径识别系统,该系统以CCD 摄像头传感器作为检测装置,直接采集CCD 输出的模拟信号,通过图像识别提取当前路径信息;与常规的光电传感器识别路径方案相比,使用摄像头传感器可以获取更多的路径信息,使智能车按任意给定的黑色引导线以较快的速度平稳地运行;实验证明该方法简便可靠,具有很好的前瞻性,能够满足智能车路径识别的需求。关键词:图像识别;智能车;H CS12单片机;电荷耦合器件
中图分类号:T P274 2 文献标识码:A 文章编号:1003 5060(2009)09 1348 04
S tudy of smart car track identification based on the linear CCD
WEN Yang do ng , WA NG Xiang hao
(School of E lectric E ngineering an d Automation,H efei U nivers ity of T echnology,Hefei 230009,Chin a)
Abstract:A smart car contro l system of the path infor mation identified based on CCD camera is intro duced.The sy stem uses the CCD sensor as its ro ute reco gnition device to sample the analo g v ideo sig nal directly from the CCD.And the current tr ack inform ation is dr aw n through imag e recog nition.Co mpar ed w ith the norm al ro ute recognitio n schem e by means of the photoelectric cell senso r,using the CCD sensor can obtain more path information,w hich makes the smart car run smoo thly at much rapid speed along the black g uide line g iven arbitr arily.T he exper im ental result show s that this meth o d is simple and efficient w ith go od forw ard loo king perspective,w hich can m eet the demands of smart car path recog nition.
Key words:im age reco gnition;sm art car;free scale H CS12sing le chip com puter;char ge coupled de v ice
0 引 言
智能车系统设计是一种以智能汽车为研究背景的科技创意性制作。主要由控制核心单元、电源管理单元、路径识别单元、车速检测单元、转向伺服电机控制单元及直流驱动电机控制单元组成。路径识别模块是智能车系统的关键模块之
一,路径识别方案的好坏,直接关系到最终性能的优劣
[1]
。
1 方案选定
在以往比赛中光电传感器寻迹方案应用最
多,但由于这种方法有赛道空间分辨率低,识别道路信息少,前瞻性差等缺点,使用线阵CCD 器件则可以更有效地解决这些问题。普通CCD 传感器图像分辨率都在300线之上,远大于光电管阵列。通过镜头,可以将车前方很远的道路图像映射到CCD 器件中,从而得到车前方很大范围内的道路信息。对图像中的道路参数进行检测,不仅可以识别道路的中心位置,同时还可以获得道路的方向、曲率等信息。根据实验相比于光电传感器只能探测到前方10~15cm 距离,使用CCD 则可提前获得前方8~60cm 的路径信息,为数据处理和舵机转向提供了充裕的时间,通过图像信息
处理的方式得到道路信息,可以有效进行车运动控制,提高路径跟踪精度和车运行速度[2]。
所采用的摄像头是FQY888A 系列的208B 黑白型款,供电电压是6V,分辨率为350线。输出制式是标准视频信号(PAL/NT SC )。它能够利用S12单片机内部硬件资源有效地设计路径参数检测方法。利用S12内部的AD 转换器,配合从视频信号中分离出的同步信号,直接将图像信号采集到单片机内部RAM 中,然后通过软件对图像信息进行处理,得到路径各种参数。
2 硬件模块设计
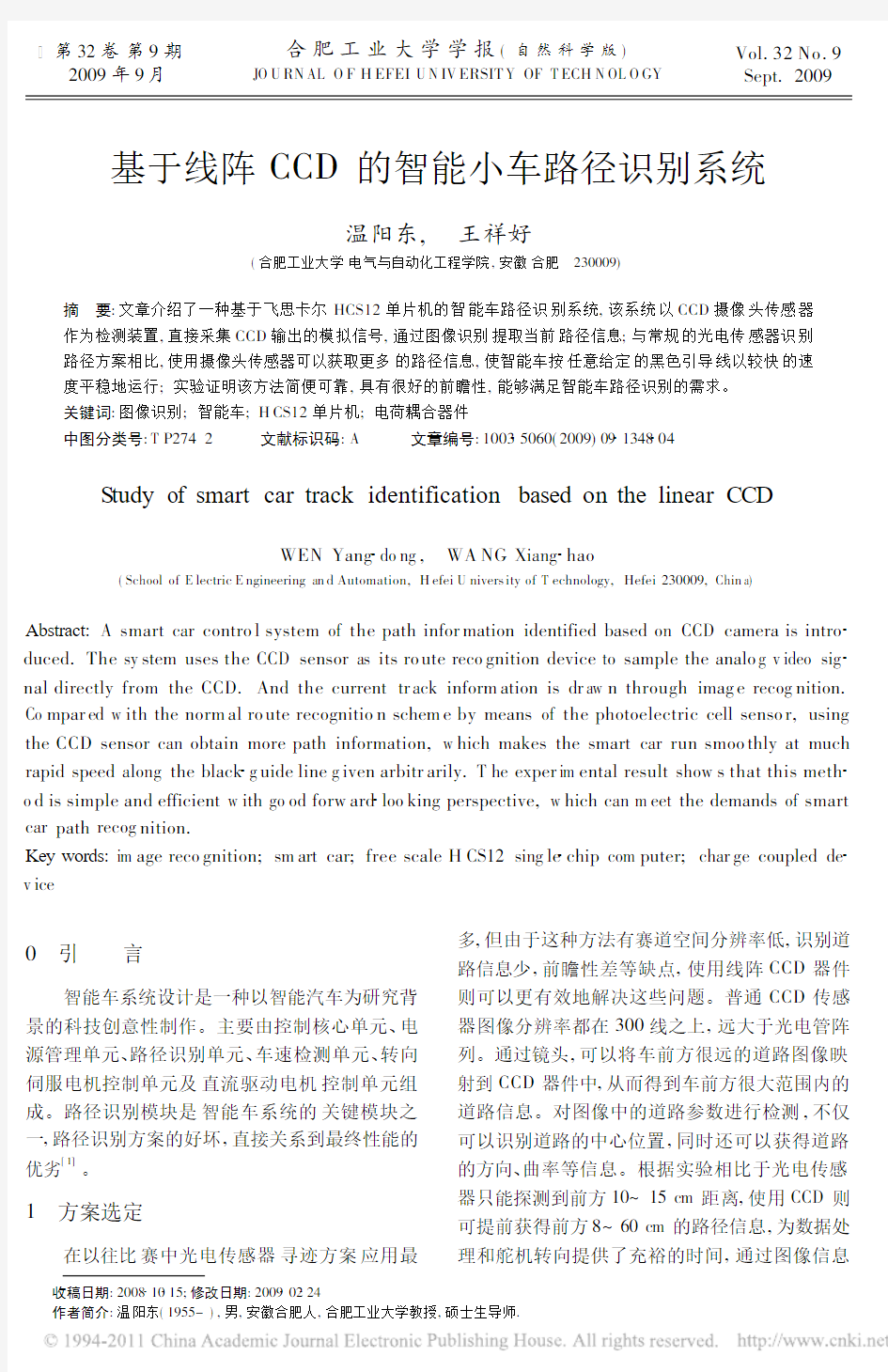
摄像头的主要工作原理是:按一定的分辨率,以隔行扫描的方式采样图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度成一一对应关系的电压值,然后将此电压值通过视频信号输出。当摄像头扫描完一行,视频信号端的输出有一个电压 凹槽 ,并保持一段时间,此 凹槽 叫做行同步脉冲,它是扫描换行的标志。跳过一行后,开始扫描新的一行,如此下去,直到扫描完该场的视频信号,接着就会出现一段场消隐区。在这若干个消隐脉冲中,有个脉冲远宽于其他的消隐脉冲,该消隐脉冲即称为场同步脉冲,它是扫描换场的标志。
如图1所示。摄像头每秒扫描25幅图像,每幅又分奇、偶2场,先奇场后偶场,故每秒扫描50场图像,即扫描周期为20ms [3]
。
图1 摄像头视频信号
智能小车若能进行很好的图像采集,首先要处理好的技术问题,就是能有效地从摄像头信号中提取出行同步脉冲、消隐脉冲及其场同步脉冲。
有2种可供参考的方法: 直接用AD 进行提取。当摄像头信号为行同步脉冲、消隐脉冲或场同步脉冲时,摄像头信号的电平就会低于这些脉冲以外时候的摄像头信号的电平。据此,可设一个信号电平阈值来判断AD 采样到摄像头信号是
否为行同步脉冲、消隐脉冲或场同步脉冲; 给
单片机配以合适的外围芯片,此芯片要能够自己提取出摄像头信号的行同步脉冲、消隐脉冲和场同步脉冲来供单片机作控制之用。
直接AD 转换提取脉冲的方法硬件上较容易实现,但是S12单片机AD 转换速度不够快,在不超频的情况下,最短的AD 转换时间为7 s,有可能漏检行同步脉冲或消隐脉冲,这会使视频采样效果变差。并且这种方法会占用较多的单片机资源,不利于系统的整体控制[4]
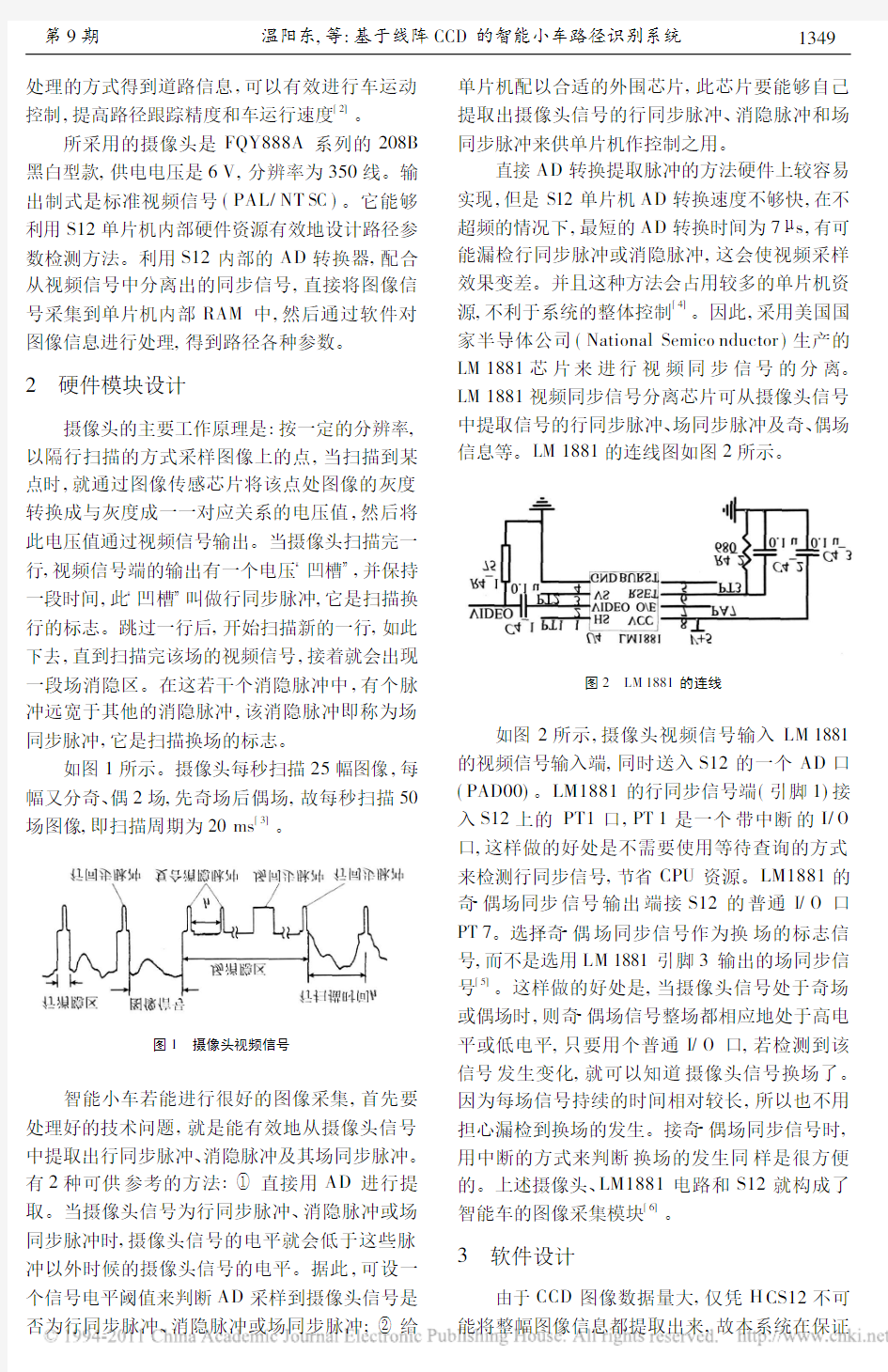
。因此,采用美国国家半导体公司(National Semico nductor )生产的LM 1881芯片来进行视频同步信号的分离。LM 1881视频同步信号分离芯片可从摄像头信号中提取信号的行同步脉冲、场同步脉冲及奇、偶场信息等。LM 1881的连线图如图2所示。
图2 LM 1881的连线
如图2所示,摄像头视频信号输入LM 1881的视频信号输入端,同时送入S12的一个AD 口
(PAD00)。LM1881的行同步信号端(引脚1)接入S12上的PT1口,PT 1是一个带中断的I/O 口,这样做的好处是不需要使用等待查询的方式来检测行同步信号,节省CPU 资源。LM1881的奇 偶场同步信号输出端接S12的普通I/O 口PT 7。选择奇 偶场同步信号作为换场的标志信号,而不是选用LM 1881引脚3输出的场同步信号[5]。这样做的好处是,当摄像头信号处于奇场或偶场时,则奇 偶场信号整场都相应地处于高电
平或低电平,只要用个普通I/O 口,若检测到该信号发生变化,就可以知道摄像头信号换场了。因为每场信号持续的时间相对较长,所以也不用担心漏检到换场的发生。接奇 偶场同步信号时,用中断的方式来判断换场的发生同样是很方便的。上述摄像头、LM1881电路和S12就构成了智能车的图像采集模块[6]。
3 软件设计
由于CCD 图像数据量大,仅凭H CS12不可能将整幅图像信息都提取出来,故本系统在保证
1349
第9期温阳东,等:基于线阵CCD 的智能小车路径识别系统
不漏检黑色引导线的前提下,采用如下一些措施: S12适当超频运行,通过配置PLL,将主频设为32M; 提高AD 转换频率,降低AD 转换精度,将AD 转换器时钟频率提高到12~24MH z,在损失一定转换精度的代价下(采用8位),将转换时间缩短为1 5 s 左右,这样在一行图像信号中可以采集48个有效的图像信息; 隔行采集,每隔10个有效行采集1行。实际测试,每行采24个点也能满足控制要求,这样最终得到30*24分辨率的图像,检测出的路径参数仍能满足控制需要。因此,所需要的图像存储空间以及图像采集的时间就大为降低了[7]
。图像采集程序流程如图3
所示。
图3 摄像头信号处理流程
图4所示是S12单片机采集到并通过串口传送到微机显示的前方直线路径中心线的图像数据,它们的分辨率为30*24
。
图4 直线赛道图像数据图
图像处理模块主要完成采集图像中的黑色中
心线参数的计算。实验中,采用简单的动态阈值
比较的方法,得到每一行中心线的水平位置,然后通过参数拟合得到中心线在图像坐标系中的位置、方向以及曲率。接着对CCD 视频传感器采集
的视频数据进行路径判断处理,这时,需要确定视频阈值的大小。如果像素点灰度值小于该阈值,则确定该点为黑点,否则,确定其为白点。通过实验可以基本上确定该阈值的大小,由于现场灯光的影响会有略微的变化。但是该阈值基本上介于26~33之间。经过比较实验将阈值定为32,得到的数据误差点数最少
[8]
。为了调试和软件使用,
把黑点对应的灰度值都置为0,其他的置为1。
考虑到比赛现场灯光变化引起赛道图像灰度变化的情况,本系统采用边缘检测算法实现中心点的提取,只需选定黑白阈值差即可适应灯光的变化,稳定性较好。由于干扰的像素点一般比较少,通过限定提取到的黑线宽度,并取灰度值最低的点为黑线,可有效地排除干扰点。边缘检测算法程序流程如图5所示。
图5 边缘检测算法程序流程
由于图像检测范围的减小,可能在结果中会出现如下情况: 弯度大的弯道可能采集不到黑线; 检测到的直线赛道与弯道的差别很小,不利于算法的区分。
经过测试发现,一般在离摄像头最近也就是数据的最后一行出现干扰情况很少,因此就在此行内搜索第一个黑点作为黑线左边界位置,搜索结束,以这个位置为基准左右各偏移一定距离作
为下一行搜索的范围,下一行搜到边界后,再依次类推计算出以后各行的搜索范围。有时有些行的图像中无黑线,这种情况可能是灯光干扰,也有可
(下转第1353页)
1350
合肥工业大学学报(自然科学版)第32卷
件,用于可编程序控制器的监视与控制,以形象的文字、指示灯、动画及曲线等形式监视、修改PLC 内部寄存器或继电器的数值及状态[8]。该磨皮机触膜屏,控制和反应系统的工作状态及运行状态[8]。
4 结束语
本控制系统采用西门子S7 200系列可编程控制器及HITECH ADP触摸屏,完成对磨皮机除锈的控制,能够提高除锈质量,加强控制的可靠性,并克服了继电 接触控制系统的不足。
利用PLC自身可靠性高的优点,实现对磨皮机控制系统的高精度控制,同时触摸屏的应用还可以使控制系统的运行过程得到直观监控,提高了控制状态的可监测性。
[参 考 文 献]
[1] 刘富桥.钢结构常用表面除锈处理方法[J].南方建筑,2006,
(7):81-82.
[2] 侯 玫,张传俊.现代工业中几种先进除锈方法的对比研究
[J].机械研究与应用,2007,(4):19-20.
[3] 王仲文,邵俊鹏.基于PLC和触摸屏的工业汽轮机控制系统
的设计[J].哈尔滨理工大学学报,2007,12(6):107-109. [4] 江华生,欧阳玉霞,曾延波.基于PLC和触摸屏的步进电机控
制系统的设计[J].机械与电子,2008,(10):75-78.
[5] 刘丽华,李 笑.基于PLC与触摸屏的玻璃清洗机控制系统
设计[J].制造业自动化,2008,30(6):58-61.
[6] 张万忠,刘明芹.电器与PLC控制技术[M].北京:化学工业
出版社,2003:77-240.
[7] 西门子公司.SIM A T IC S7 200PLC系统编程手册[EB/OL].
http://download,https://www.doczj.com/doc/4f714405.html,/file/2005/5/17/s7-200-
cn.pdf,2009 08 17.
[8] 崔剑平,赵 振,王秋敏.PLC和触摸屏在控制系统中的应用
[J].现代制造,2007,(1):46.
(责任编辑 张 镅)
(上接第1350页)
能是图像本身就没黑点,此时置一个无效标志位。同时加入右边界检测,可以减少干扰。
由上面边缘检测算法得到的信息,根据30行中每行黑线位置与其平均位置之间的相对位移 X,再求出30行相对位移之和curve,便可确定弯道与直道之间的阈值大小,也即反映了道路的曲率信息,该相对位移越大,曲率也越大[9]。
X= max
r ow=0
X[row]
max
(1)
curve= max row=0|X[row]- X|(2) 4 结束语
基于线阵CCD的智能小车路径识别系统,在硬件上采用CCD摄像头采集道路图像,LM1881芯片分离视频信号,H CS12作为控制核心;在软件上采用隔行采集边缘提取的图像处理算法提取路径信息。
实验证明,该小车能沿着白色跑道上铺设的黑色引导线以较快的速度平稳地行驶。较之光电传感器寻迹方案,平均速度可由前者的1 6m/s提升到2 0m/s左右,并且整个车身摆动幅度很小。该方案已应用于全国大学生智能车大赛中,现场效果良好。
[参 考 文 献]
[1] 邵贝贝.单片机嵌入式应用的在线开发方法[M].北京:清华
大学出版社,2004:52-55.
[2] 刘建刚,程 磊,黄 剑,等.基于CCD图像识别的HCS12单
片机智能车控制系统[J].光电技术应用,2007:22(6): 52-60.
[3] 葛亚明,刘 涛,王宗义.视频同步分离芯片LM1881及其应
用[J].应用科技,2004,31(9):20-22.
[4] 卓 晴,黄开胜,邵贝贝.学做智能车:挑战 飞思卡尔 杯
[M].北京:北京航空航天大学出版社,2007:35-40.
[5] 程亚龙,周怡君.基于CM OS传感器的智能车路径识别研究
[J].机械制造与研究,2007,36(5):13-15.
[6] 代 荣,龙 燕,李剑峰,等.基于CCD成像系统的硬件电路
设计[J].现代电子技术,2007,30(22):185-187.
[7] 李义高,南忠良,马 骁.线阵CCD高速采集和实时传输系统
设计[J].自动化与仪表,2007,22(6):70-74.
[8] 吴文明,赵田东.基于面阵CCD的视觉图像传感器[J].浙江
大学学报(工学版),1997,31(4):556-561.
[9] 贾秀江,李 颢.摄像头黑线识别算法和赛车行驶控制策略
[J].电子产品世界,2007,(5):146-147.
(责任编辑 张 镅)
1353
第9期蒋冰华,等:基于PLC与触摸屏的磨皮机控制系统设计
智能小车的路径识别问题 摘要:智能小车路径识别技术是系统进行控制的前提,介绍了路径识别技术的几种分类及相应的优缺点,通过分析得出面阵CCD摄像更适合作为采集信息的工具。 关键词:智能小车;路径识别;面阵CCD摄像器件 Abstract: Smart car’s path recognition technology is the premise of the control system, this paper introduces the path of several classification and recognition technology, through the analysis of the advantages and disadvantages of the corresponding to array CCD camera is more suitable for gathering information as the tool. Key words:smart car; Path recognition; Surface array CCD camera device 0 引言:为培养大学生的自主创新设计的能力,各大高校都设置了智能车比赛,智能小车 行驶在给定的白色路面,由中间的黑色轨迹线引导,实现自主循迹功能。实现该 功能的小车主要由电源模块、循迹模块、单片机模块、舵机模块、后轮电机驱动 模块组成。路径模块一般由ATD模块,外围芯片和电路,与路面信息获取模块 组成,要能够快速准确得进行路径识别检测及相关循迹算法研究,本文就这两个 方面进行相应的分析和介绍。 1 光电传感器 1.1 反射式红外发射接收器 半导体受到光照时会产生电子-空穴对,是导电性能增强,光线愈强,阻值愈低。这种光照后电阻率变化的现象称为光电导效应[1],用于路径检测的反射式红外光电传感器基于此原理设计。该传感器一般由一个红外线发射二极管和一个光电二极管组成,可以发射并检测到反射目的光线。不同颜色的物体对光的反射率不同,当发射出的红外光对准黑色物体时,反射的红外线很少,光电二极管不能导通,反之,当对准白色物体时,光电二极管导通[2]。系统的单片机接收到光电二极管的信息根据相应的算法分析出小车此时的位置及位置偏离度,进而控制小车的方向和速度。 光电式传感器是通过对光的测量通过光电元件转化为电信号,并输出有效的输出量,由于外界光电因素的原因导致空间分辨率低是每个红外传感器存在的缺点,因此必须对原始传感器信息进行预处理,取相对值是一种有效解决外界干扰的方法,即将传感器未发射红外线时的A/D转换值进行提取,再与红外线时的转换值取相对值。文献[2]同时也提出了如何根据每个传感器的相对值与传感器位置推断出车模相对于黑色引导线的横向偏移位置。而文献[3]中所描述的方法与文献[2]有异曲同工之妙,文献[4][5]也对光电传感器的路径算法有详细科学的介绍。 1.2光敏电阻阵列传感器 假设光敏电阻阵列布置如图1所示,在智能小车的正前方布置n个光敏电阻( n=1,2,…, 11 ) ,在其质心位置依次紧密排列m个光敏电阻(m=1,2…7),首先测出路径黑色区域和白色区域的光敏电阻值,以通过d点的中心线的交点为原点建立坐标系,两排光敏之间的距离为K,光敏n和n+1且n>6或者(n和n-1且n<6)所测的值分别为黑色区域值和白色区域值,光敏6中心为智能小车的中心线通过点,而光敏d也为其通过点,连接这两点即为智能小车的中心线,则通过小车中心线并与黑色区域光敏值对应的光敏n与光敏m的连线即为所求路径信息。理论上讲,只要有两点就可以确定唯一的直线。
单目视觉智能车路径识别及控制策略研究* 陈启迅 薛 静 (西北工业大学自动化学院 西安710072 )摘 要 研究了基于CMOS摄像头的图像采集方法,以及智能车赛道路径识别。提出了自适应差分边缘检测算法,采用取点求面积的方法提取指引线的相关参数。自适应差分边缘检测算法是在一般的边缘检测算法的基础上提出的,它能根据提取的左右边缘存在情况调整搜索范围、阈值,以及差值的求取方法。使用海伦公式求指引线上所取的三角形的面积, 据此提出了1种基于三角形面积的智能车速度控制方法,此方法以指引线上的三角形面积反映赛道的弯曲程度,并以此作为智能车速度控制的控制变量。 关键词 自适应差分边缘检测;智能车;图像采集;海伦公式 中图分类号:TP301.6 文献标志码:A doi:10.3963/j .issn 1674-4861.2012.05.006收稿日期:2012-07-04 修回日期:2012-09- 07 *西北工业大学研究生创业种子基金项目( 批准号:Z2011047)资助第一作者简介:陈启迅(1984),硕士生.研究方向:控制工程、系统工程.E-mail:cq x062014@126.com0 引 言 智能车辆系统是1个拥有感知环境能力,具备规划决策能力以实现自动行驶,并且可以实现多等 级辅助驾驶等功能于一体的综合系统[ 1 ]。与很多学科有着密切关系,如计算机、控制、通信、图像处 理、人工智能、信号处理等,同时也是多种传感器融 合的载体。因为它一般集中了摄像机、GPS、超声波雷达、激光雷达等多种传感器来感知周围环境, 并根据多传感器融合所获得的道路、车辆状态和障碍物信息进行控制车辆的转向和速度,从而使得车辆安全、可靠、稳定地在道路上行驶,因此智能车辆 是多学科综合于一体的高度智能化的产物[ 2- 3]。文献[4] 中介绍了一般差分边缘检测算法。文献[5 ]中描述了基于序列图像运动分割的车辆边界轮廓提取算法。文献[6]中提到了道路裂纹线检测中的脊波域图像增强算法。选用功耗低、前瞻性好的CMOS摄像头作为路径识别视觉传感器,采用自适应差分边缘检测算法有效地提取道路指引线,此算法具有很高的灵活性和适应能 力, 能够有效地降低干扰。进一步使用取点求面积的方法获取指引线参数。 1 视觉图像采集 1.1 硬件实现 CMOS视觉传感器图像采集电路[7] 见图1 ,LM1881可以实现视频同步信号的分离。2脚为视 频信号输入端;3脚和5脚分别为场同步、行同步信号输出端;7脚为奇偶场同步信号输出端,在此不使用。视频信号同时接入微处理器AD转换口 。 图1 视频同步信号分离电路 Fig.1 The circuit for separation of sy nchronizationsig nal of video1.2 软件实现 视频信号采集流程[8] :首先等待场信号的到 来;然后延时,跳过场消隐,约1.44ms;等待行同步信号;判断采集行数是否满足要求,满足则采集完成,否则延时,跳过行同步信号和消隐信号;对1行视频信号进行连续采集; 延时,跳过若干行视频信号,再跳回到等待行同步信号,直至完成,就能采集到1幅有效而完整的视频图像了。 2 自适应差分边缘检测算法 阈值分割法[9- 10]在结构化道路上是提取指引 4 2交通信息与安全 2012年5期 第30卷 总171期
基于线性CCD图像识别智能小车的设计与开发 目前,具有自动驾驶功能的智能车越来越引起人们的重视。智能车装备了各种传感器来采集路况信息,通过计算机的控制可以实现自适应巡航,并且又快又稳、安全可靠。智能车不仅能在危险、有毒、有害的环境里工作,而且能通过计算机的控制实现安全驾驶,能大幅度降低车祸的发生率。智能车的设计关键是路况信息的采集,传统的方案多采用红外光电传感器,此方案不仅噪声较大,而且与主控CPU的连接电路复杂,传输速率慢。本文研究的智能小车系统选用了TSL1401CL线性CCD图像采集模块,该模块采用串行通信方式与主控CPU连接,不仅电路简单、性能稳定,而且采集速率快。通过实验测试,本文设计的智能车能根据采集到的图像分析前方路径及障碍而实现智能驾驶,具有极强的实用价值和市场前景。 1 系统设计思想 经过调研与分析,我们采用了MC9S12XS128单片机、TSL1401CL线性CCD图像采集模块、稳压芯片以及液晶OLED等外围器件设计与开发出这套智能小车系统。MC9S12XS128高速单片机为Freescale公司新推出的16位高性能高速单片机,其接口丰富、功耗低、信息处理能力强大,能对小车前方路径及障碍进行及时分析,处理迅速、性能稳定。为了提高路面图像采集的速度与质量,我们选用了TSL1401CL线性CCD图像传感器。TSL1401CL 具有功耗小、性能稳定、灵敏度高、响应速度快等优点,其工作过程是先将路况光学信号转换为模拟电流,模拟电流放大后再进行A/D转换变成数字信号,最后通过串口送至主控CPU。智能小车的CPU根据CCD采集到的信息进行分析和处理,从而实现系统的自动控制与障碍处理、路径探测。在软件设计中我们采用了先进的PID(比例、积分、微分)算法,其运算参数可以根据过程的动态特性及时整定。通过PID算法,模糊PID算法来实现智能车的转向、控速等精确自动控制,另外还有很好的避障功能,实现了全智能的安全控制。 2 系统硬件设计 本项目采用模块化设计与开发,主要有CCD采集模块、电源模块、电机驱动模块、车速
第二届全国大学生智能汽车竞赛技术报告 基于CCD视频传感器的智能车路径识别控制系统(下) 4.2电源管理模块设计 电源是一个系统正常工作的基础,电源模块为系统其他各个模块提供所需要的能源保证,因此电源模块的设计至关重要。模型车系统中接受供电的部分包括:传感器模块、单片机模块、驱动电机模块、转动电机模块以及其它的外围辅助模块等。设计中,除了需要考虑电压范围和电流容量等基本参数外,还要在电源转换效率、噪声、干扰和电路简单等方面进行优化。可靠的电源方案是整个硬件电路稳定可靠运行的基础。 全部硬件电路的电源由7.2V,2A/h的可充电镍镉电池提供。由于电路中的不同电路模块所需要的工作电流容量各不相同,因此电源模块应该包含多个稳压电路,将充电电池电压转换成各个模块所需要的电压。本系统主要用到了以下几个不同的电压,如表4.1所示。 电源模块由若干相互独立的稳压电源电路组成。在本系统中,除了电机驱动模块的电源是直接取自电池外,其余各模块的工作电压都需要经电源管理芯片来实现。 5V电源的实现是通过电源管理芯片TPS7350来实现的。TPS7350是一款低压稳压芯片,能提供5V的固定电压输出。TPS7350低压差稳压芯片克服了早期稳压芯片的缺点,而且还增加了如节电待机模式和供电管理等功能。与其它的稳压芯片一样,TPS7350需要外接一个输出电容来保持输出的稳定性。出于稳定性考虑,需要在稳压输出端和地之间接一个10uF低等效电阻的电容器。除非该等效电阻小于1.2欧姆,否则引入的陶瓷电容或薄膜电容器会使输出的电压不稳定。在很小或根本就没有旁路电容的情况下,输出电容可以减少到4.7uF,所提
基于视觉传感器的智能小车的标志识别系统 摘要:视觉信号具有信号探测范围宽、获取信息丰富等优点。随着近几年图像处理技术以及计算机处理能力的飞速发展,视觉导航成为机器人导航的主要发展方向之一。机器人导航的任务之一就是根据路面特征来行走,本文在Visual C++集成开发环境中基于OpenCV 和DirectShow 视频采集技术编程实现了系统的功能。本文所设计的就是一个基于视觉传感器的智能小车的标志识别系统,根据图像分析后的二值图像序列信息,使小车能根据识别到的图像信息进行运动。 关键词:智能小车视觉导航图像处理特征识别 The Mark Recognition System Based on Vision for an Intelligence Vehicle Abstract:Visual signal with the signal detection range, access to information-rich and so on. As in recent years, image processing technology and the rapid development of computer processing power, visual robot navigation as the main development direction of navigation. Robot navigation tasks is to walk to the road characteristics, this article in Visual C + + integrated development environment based on OpenCV and DirectShow video capture technology, programming function of the system. This article is designed is a smart vision sensor based car sign recognition system, according to the image analysis of binary image sequences, so the car can be identified according to the image information campaign. Key Words:Intelligence Vehicle Mark Recognition Image Processing Feature Recognition 1 绪论 机器人[1]的导航技术是智能型机器人自主完成任务的核心技术。移动机器人[2]导航是指移动机器人按照预先给出的任务命令,根据已知信息做出路径规划,并在行进过程中,不断感知周围的局部环境信息,自主地做出决策,调整自身位姿,引导自身安全行驶或跟踪已经路径到达目标位置。这其中包括三个主要内容:避障、定位和路径规划。本文所设计的就是一个基于视觉传感器的智能小车的标志识别系统,根据图像分析后的二值图像序列信息,小车能根据识别到的图像信息进行运动。 2 基于视觉传感器的智能小车系统 本论文是基于视觉传感器[8]的智能小车识别系统,试验的平台选用的是上海中为机器人提供的小车,小车实现的功能是在地面行走时,能根据摄像头反馈回的地面特征,实现自主移动。实验中用到的模块有,CMOS 摄像头,无线图传模块,传感与通讯模块,运动控制模块,远程控制模块,USB 图像采集卡,运动过程如图2.1所示:
四信息技术四胡世林,等四智能车线性CCD 路径识别方法 Machine Building Automation ,Aug 2015,44(4):123~125 基金项目:滨州学院创新基金资助(BZXYQNLG201101) 作者简介:胡世林(1988-),男,陕西汉中人,硕士,研究方向为机械工程三智能车线性CCD 路径识别方法 胡世林1,韩致信1,崔继强2 (1.兰州理工大学机电工程学院,甘肃兰州730050;2.滨州学院,山东滨州256603)摘一要:论述了TSL1404CL 线性CCD 的识别原理,设计了CCD 路径识别系统硬件电路,分析固定阀值与动态阀值以及固定中心点边缘检测与浮动中心点边缘检测的优缺点,运用LabVIEW 软件编写上位机界面,获取了不同检测方法下的赛道信息,优化了系统的控制策略, 提高系统的响应速度和准确性三实验证明该系统能在不同光照条件下准确识别赛道,具有很好的鲁棒性三 关键词:飞思卡尔;线性CCD ;边缘检测 中图分类号:TP273一一文献标志码:B一一文章编号:1671-5276(2015)04-0123-03 Research on Path Identification Method of Intelligent CarBased on Linear CCD HU Shilin 1,HAN Zhixin 1,CUI Jiqiang 2 (1.College of Mechanical and Electrical Engineering ,Lanzhou University of Technology ,Lanzhou 730050,China ;2.Binzhou University ,Binzhou 256603,China ) Abstract :This paper discusses TSL 1404CL linear principle of CCD and designs the hardware circuit of a CCD path identification sys-tem ,analyzes the fixed threshold and dynamic threshold and the advantages and disadvantages of fixed centre point edge detection algorithm and floating point edge detection algorithm ,uses LabVIEW to compile upper computer interface ,achieves circuit informa-tion with different detection methods and optimizes the system control strategy to improve the response speed and accuracy.The ex-periment results show that the circuit can be accurately identified in this system and it has good robustness. Keywords :freescale ;linear CCD ;edge detection 0一引言 路径识别是自主循迹智能车实现控制并稳定运行的基础,道路信息提取的准确与否直接影响到控制策略能否实现三而道路信息提取的准确性取决于传感器能否准确地区分出黑色引导线与白色背景以及其他干扰信息三如图1所示,第八届飞思卡尔车模竞赛的赛道是一个具有特定几何尺寸约束二摩擦系数及光学特性的 KT 图1一赛道示意图 板,45cm 宽的白色KT 板两边贴有宽度为2.5cm 对可见光及不可见光均有较强吸收特性的黑色条带作为引导线三大赛规定赛道传感器选用线性CCD三线性CCD 提取信号是被动的接受反射回的光线,因此,采集的信号易受外界环境的影响三例如,赛道黑色引导线很可能由于发生镜面反射而被误判为白色背景三所以,设计一个识别准确,抗干扰能力强的路劲识别系统,使智能车在不同光照条件下均能正常运行,这对自主循迹智能车是尤为重要的三 1一线性CCD 识别方案 该系统采用飞思卡尔MC9S12XS128单片机作为控制核心,将线性CCD 捕获的模拟量赛道信息转化成数字信号,进行分析计算小车与赛道之间的偏差和赛道走势,进而控制小车沿赛道行驶而不偏离赛道三 该车道路传感器使用的是Texas Advanced Optoelec- tronic Solution 公司的TSL1401CL 线性CCD三该传感器 是包含128个光电二极管的线性阵列三每个光电二极管都有各自的积分电路,此电路统称为像素三每个像素在光电二极管的不同光能量冲击下产生不同的模拟电荷信号,该信号的大小与光强和积分时间成正比三在驱动时序的作用下,CCD 将模拟电荷信号串行位移输出[1]三 四 321四
自动识别路径的智能小车设计报告 来源:kaoshi365 作者:kaoshi365 日期:2009年11月12日访问次数: 625次论文关键字:智能小车电机驱动L298 自动循迹传感器算法 论文摘要:本系统采用存储空间较大的AT89S52作为主控制芯片,电动车电机驱动采用L298N芯片,结合DS10C4光电开关控制电动小汽车的自动寻路,快慢速行驶和转向,三者的结合使小车更加智能化,自动化。整个系统在设计中注意低功耗处理和力求高性价比等细节,电路结构简单,可靠性能高,无论在结构和技术上都具有较好的科学性。 本设计主要特点: 1. 高效的L298电机驱动电路,提高电源利用率。 2.利用软件实现PWM调速的方法。代替了专用集成芯片电路、通用数字组合电路、分立元器件组成电路、单片机系统控制电路、CPLD系统等。 一、模块方案比较与论证: 1. 车体设计 方案一:购买玩具电动车。购买的玩具电动车具有组装完整的车架车轮。由于装配紧凑,使得各种所需电路的安装十分方便,看起来也比较美观。但玩具电动车一般都价格昂贵。 方案二:自己制作电动车。一般的说来,自己制作的车体比较粗糙,对于白色基板上的道路面行驶,车身重量以及平衡都要有精确的测量,而且也要控制好小车行驶的路线和转弯的力矩及角度,这些都比较难良好地实现。依靠电机与相关齿轮一起驱动,能适应题目中小车准确前进、后退、转弯的要求, 基于以上分析,我们选择了方案二 2.电机模块 方案1:采用步进电机作为该系统的驱动电机。由于其转过的角度可以精确的定位,可以实现小车前进路程和位置的精确定位。虽然采用步进电机有诸多优点,步进电机的输出力矩较低,随转速的升高而下降,且在较高转速时会急剧下降,其转速较低,不适用于小车等有一定速度要求的系统。经综合比较考虑,我们放弃了此方案。 方案 2:直流电机:直流电机的控制方法比较简单,只需给电机的两根控制线加上适当的电压即可使电机转动起来,电压越高则电机转速越高。对于直流电机的速度调节,可以采用改变电压的方法,也可采用PWM调速方法。PWM调速就是使加在直流电机两端的电压为方波形式,通过改变方波的占空比实现对电机转速的调节。 基于以上分析,我们选择了方案二,使用直流电机作为电动车的驱动电机。
智能汽车路径识别中的图象处理算法 李 继 李晋尧 杨 明 孔士嘉 (北京印刷学院 信息与机电工程学院 北京 102600) 摘 要: 分析全国大学生智能汽车竞赛中智能汽车路径识别中的图象处理算法,重点介绍智能车车牌识别的控制算法。智能汽车通过OV7620数字摄像头对路面信息进行采集和处理,依次实现自动识别十字路口上的红绿灯、自动检测前方车距、自动识别车牌等功能,并以一个较高的稳定速度运行在规定的道路上。 关键词: 智能车;车牌识别;图象处理 中图分类号:TP391.4 文献标识码:A 文章编号:1671-7597(2011)1010184-02 1 绪论 到),D_out 是D 调节器的输出。因此,输出了相应的弧度角,小车方向控制的功能也就实现了。 随着21世纪经济全球化和信息化的加剧,计算机通信技术和计算机网 3 智能车自动识别十字路口的红绿灯 络技术等的迅猛发展,自动化信息处理能力和水平的不断提高并在人们社会活动和生活的各个领域得到广泛应用,高速度、高效率的生活节奏使汽智能车利用CMOS 摄像头识别十字路口的红绿灯,当小车驶至十字路口车普及成为必然趋势。 前,摄像头采集前方图像的灰度,当那个采集到某个区域的灰度值范围在伴随着世界各国汽车数量的增加,城市交通状况日益受到人们的重240-255时,则说明前方交通指示灯为红灯,小车在十字路口白线前停视。如何有效地进行交通管理,越来越成为各国政府及相关部门所关注的车,若没有采集到灰度值240-255范围时,认为前方交通指示灯指示为绿焦点。针对这一问题,人们运用先进的信息处理、导航定位、无线通信、灯,小车匀速驶过十字路口。当红灯变成绿灯时,小车检测到前方没有自动控制、图像处理和识别及计算机网络等科学技术,相继研发了各种交240-255的灰度值,则小车启动,驶过十字路口。 通道路监视管理系统、车辆控制系统及公共交通系统。这种智能交通系统 4 智能车车牌识别的控制实现 能够加强道路、车辆、驾驶员和管理人员的联系,实现道路交通管理自动车牌识别最基本的流程是:将采集后的图像二值化,然后依次经过车化和车辆行驶的智能化,增强交通安全,减少交通堵塞,提高运输效率,牌定位、字符分割、去除干扰,最后是字符识别。 减少环境污染,节约能源,提高经济活力。 4.1 二值化 本文设计的系统,就是在智能汽车以及飞思卡尔16位嵌入式处理器二值化是车牌识别的第一步。二值化前后的对比如下图2所示: S12X 单片机的基础上,对模拟驾驶进行创新设计,以期应用到实际的交通驾驶中。 2 智能车基于CMOS摄像头的路径识别和方向控制 智能车采用CMOS 图像传感器用于检测黑色跑道上两边的白线,扩展了检测范围,有助于选择正确的行进路线。在检测中,对图像中的前十行的像素进行分析,找出两条白线的中点,通过反复的实验,智能小车能够以一个较高的速度稳定地运行在给定的跑道上。 2.1 路线的识别和确定 路线识别和确定是智能车可以前行的前提。通过对摄像头所采集的图像进行二值化,然后对前十行的像素进行分析,由每行中两个白点的坐标来确定中心的坐标,从而得出十个中心坐标,将十个中心坐标连接起来,图2 二值化前后对比图 就是小车需要走的路径。图1所示为摄像头对跑道图像二值化的结果。 在车牌识别中,通过图像的二值变化将车牌与背景分割开来,要求转化的图像必须具有良好的保形性,不丢掉有用的形状信息,不产生额外的空缺等,其关键在于确定合适的阀值。 4.2 车牌定位 车牌定位是车牌识别的一个关键步骤,定位的准确与否直接影响着车牌识别的准确率。在车牌定位算法中,关键是寻找图像处理方法,使原始图像经图1 跑道的图像二值化结果 2.2 方向控制 智能汽车方向控制的核心是舵机控制,其输入信号是PWM 脉冲,并输出相应的弧度角。本文采用的S12单片机PWM 输出信号端口作为舵机的输入信号。为了使检测时更加稳定,本文采用了PID 控制器,由于无需考虑已经走过的轨道,所以本文只用比例微分调节器模块,下面公式显示了D 调节器的控制算法: 在enew ,eold 定义了这一次和下一次的角度的计算,t 是CMOS 摄像头扫描时间,微分系数Kd 被强制规定运行在0.5到1.5 (通过多次试验得 过该算法的处理后能够清楚地显示出车牌区域,同时使图像中的非车牌区域消失或者减弱,从而能准确有效地定位出车牌在图像中的位置。 车牌识别过程中,我们采用角点定位的方法,在所有的边界点中,选择某些曲率半径比较小的点,如图3所示(角点用红点表示)。 图3 二值化后角点定位图
引言 “飞思卡尔”杯全国大学生智能车竞赛是以HCS12 MCU为核心的大学生课外科技竞赛。组委会提供了一个标准的汽车模型、直流电机和可充电式电池,参赛队伍要制作一个能够自主识别路线的智能车并在专门设计的跑道上自动识别道路行驶,其中比赛限制规则之一就是传感器的总数不能超过16个。由于路径识别在本智能车控制系统中的重要地位,而路径识别结果的好坏又与传感器的选择、传感器的数量有直接关系,因此,本文针对应用于路径识别的传感器进行讨论。 传感器概述 光电传感器与CCD/CMOS图像传感器是较为常见的应用于路径识别的传感器。光电传感器物理结构、信号处理方式简单但检测距离近。CCD/CMOS能更早感知前方路径信息,但数据处理方式复杂,将CCD/CMOS图像传感器应用于路径识别是发展趋势。 红外传感器分为数字与模拟两种。数字红外传感器硬件电路简单但采集路径信息粗糙,模拟式通过将多个模拟红外传感器进行适当组合,可以再现赛道准确信息,但需占用微处理器较多的AD端口。CCD/CMOS图像传感器可分为线阵式与面阵式两种。线阵式图像传感器应用于系统对检测精度有特殊要求的场合,一般价格较昂贵。面阵式图像传感器应用于普通的视频检测,价格较便宜。对于HCS12单片机的处理能力,在这里只能选用CCD/CMOS图像传感器的信号输出格式为电视信号。 设计方案 针对第一届全国大学生智能车竞赛的赛道特色,基于上述对传感器的说明,下面讨论红外传感器与CCD/CMOS图像传感器的路径识别方案。 基于反射式红外传感器的数字光电传感器阵列的路径检测方法具有较高的可靠性与 稳定性,且单片机易于处理。虽然大赛限制传感器为16个,但仍不足以解决精度问题,而且光电传感器本身存在着检测距离近的问题,不能对远方的路径进行识别,降低了对环境的适应能力,影响了智能车的快速性和稳定性。它利用传感器对白色和黑色的反射
基于摄像头的智能车路径识别方案 摘要:本文按照第四届“飞思卡尔”杯全国大学生智能汽车邀请赛的技术要求,经过一段时间的资料的采集与样本电路的参照,本文主要介绍了车模的系统设计原理,系统软件,与方案简介。在硬件电路的设计与实现中,描述了最小系统设计,电源模块,并且着重描述数字摄像头OV6620,在软件系统设计中,讲述了时 钟模块,ECT模块,图像采集以及图像处理等内容,经过实践证明,这些理论方案都可以得到证明,能使汽车稳定快速运行。 关键字:智能车;摄像头;电源模块;图像采集 The identification of intelligent vehicle path of program is based on Camera Abstract: This article in accordance with the 4th "flying to Karl" Cup National University SMART Car Invitational technical requirements for the time of the information gathering and sample circuits in the light of this article introduces the car model system design principles, system software, and the programme profile. On the hardware circuit design and implementation, describes the minimum system design, power supply, with emphasis on described digital camera OV 6620 in software design of the system on the clock module, ECT modules, image acquisition and image processing, the practice has proved that these theories programmes can be proved that auto steady and rapid operation Keywords: SMART cars; camera; power supply; image acquisition 目录 前言 4
高速公路网 车辆路径识别系统方案建议书
目录 一、概述 (3) 1.1需求分析 (3) 1.2高清车牌识别系统解决方案 (4) 1.3系统扩展功能 (4) 二、系统设计 (6) 3.1系统规划 (6) 3.2多路径车辆识别监测系统 (7) 3.2.1点位设计 (8) 3.2.2系统构成 (8) 3.3车辆超速全程监控系统 (10) 3.3.1点位设计 (11) 3.3.2系统构成 (12)
一、概述 1.1需求分析 目前在高速公路路径识别的主要技术方法有标识法、车牌照识别法、最短路径法、布瑞尔交通分配法、出口确认法、路网平衡法、最大概率法、协商法、抽样调查法等等。国内比较实用的有标识站法和车牌照识别法。 1. 标识站法 标识站识别方法是依据精确识别原理,准确识别车辆的实际行驶路径,标识站法可分为停车式和不停车两种。在本文中重点对停车式标识站进行分析,以下提到的标识站均为“停车式标识站”。 在需要设置标识站的地方设置几条带收费岛的车道,前方设标志说明,收费车道上安装费接触式IC卡读写设备,司机通过此路段时,需将IC卡在读写天线的规定距离内划过,自动栏杆开启、车辆通行,记录该标识站信息。标识站还需要设置摄像机(对冲卡车辆进行抓拍)、雾灯等安全设施。该标识站的设立实际上上相当于主线收费站的建设,由收费亭、带IC卡读写器的计算机、自动栏杆、(摄像机)、雾灯、通行灯以及通行系统组成。路径的识别主要依靠写入通行卡的标识站编码,由出口根据入口、标识站信息自动计算车辆行驶路径。 由于标识站识别方法是依据精确识别原理,准确识别车辆的实际行驶路径,因此,标识站识别方法识别的精度较高。标识站的主要缺点是车辆每次经过标识站时必须停车,导致行车速度降低,降低了高速公路的服务水平,与联网收费的精神直接想违背,对社会形象也是一种极大的损害。 2. 车牌照识别技术 随着图像识别技术的发展,也可应用“车牌照识别”技术进行多路径的识别。即高速公路出、入口设置车牌照抓拍系统,在路网内关键点设置车牌照抓拍系统,摄取通过车辆牌照。
基于摄像头的路径识别系统 摘要 本文介绍了一种智能车路径识别系统。在该系统中,以飞思卡尔16位单片机MC9S12XS128作为核心控制单元,以CodeWarrior IDE作为集成开发环境,使用CMOS摄像头采集路面信息,通过单片机读取摄像头数据并从图像中提取出边沿信息,最终通过计算得到不同赛道的斜率和曲率,以此作为智能车行驶的依据。在程序的软件设计中,详细的阐述了图像采集,图像预处理,特征提取和路径判断。其中,在图像采集中使用了中断的方法,在图像预处理中使用了中值滤波算法,并且在黑线提取中提出了直接边沿检测和跟踪边沿检测相结合的算法。实验表明,系统能很好地满足智能车对路径识别性能和抗干扰能力的要求,具有较好的动态性能适应性。 关键词:路径识别;边沿检测;摄像头;斜率;曲率
The Path Recognition System Based on Camera ABSTRACT A kind of path recognition system of intelligent vehicle is introduced in this paper.This system based on MC9S12XS128 as the micro-controller unit. The CodeWarrior IDE is used as the integrated development environment. In order to read and extract the edge information, a CMOS image sensor is used to obtain lane information from the image.Finally,running basis is obtained through calculation of slope and curvature of the track. In the software design of process, the image acquisition and preprocess, feature extraction and approaches are detailed described. Among them, the interrupt method is used in image acquisition and median filtering algorithm is used in image processing.Especially,direct edge detection and tracking edge detection are combined in the black line extraction. Experiments show that, the system can well meet the requirements of intelligent vehicle path identification performance and it has better adaptability, anti-jamming ability and dynamic performance. Keywords:path recognition;edge detection;camera;slope;curvature