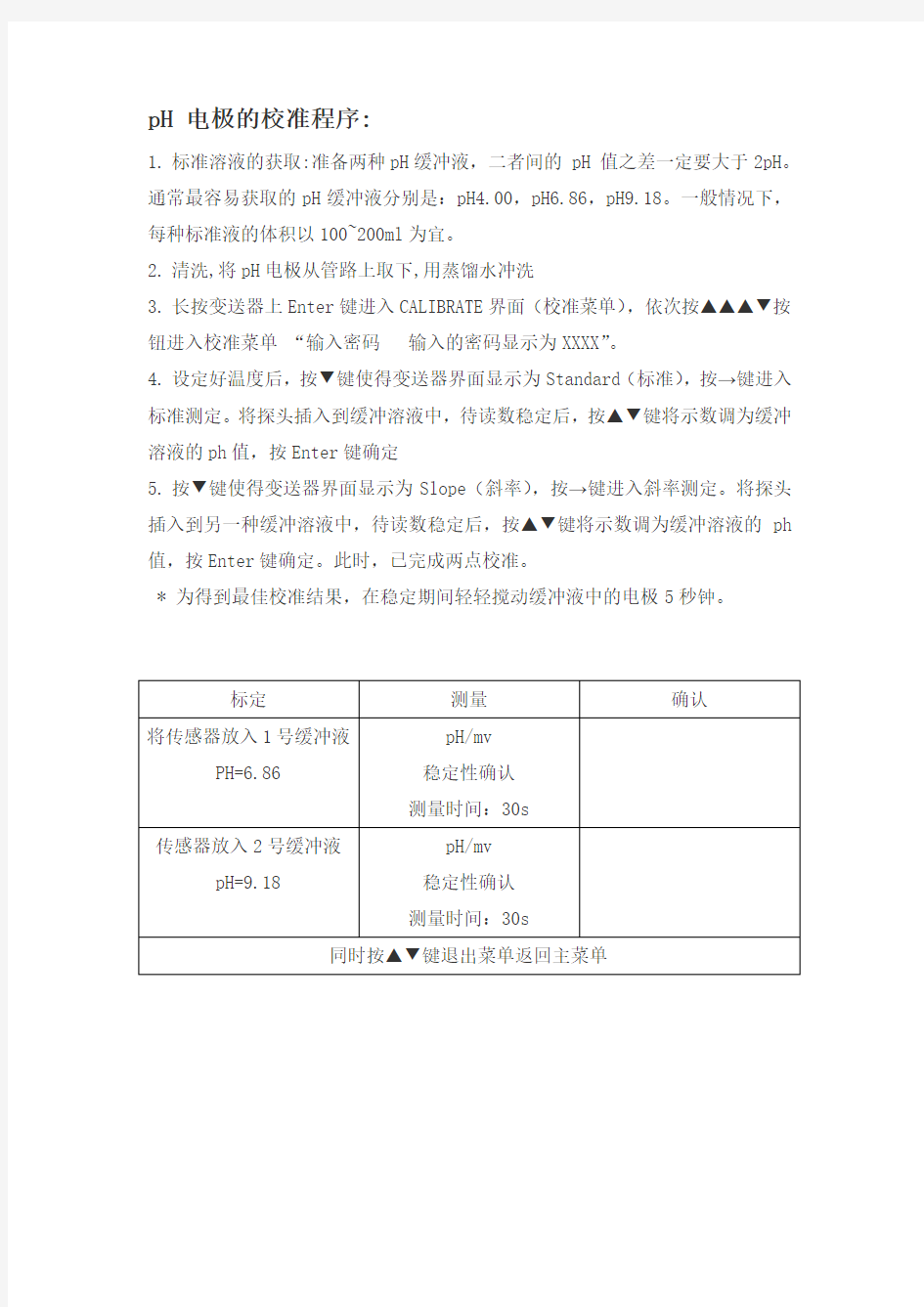
pH 电极的校准程序:
1.标准溶液的获取:准备两种pH缓冲液,二者间的 pH 值之差一定要大于2pH。通常最容易获取的pH缓冲液分别是:pH4.00,pH6.86,pH9.18。一般情况下,每种标准液的体积以100~200ml为宜。
2.清洗,将pH电极从管路上取下,用蒸馏水冲洗
3.长按变送器上Enter键进入CALIBRATE界面(校准菜单),依次按▲▲▲▼按钮进入校准菜单“输入密码输入的密码显示为XXXX”。
4.设定好温度后,按▼键使得变送器界面显示为Standard(标准),按→键进入标准测定。将探头插入到缓冲溶液中,待读数稳定后,按▲▼键将示数调为缓冲溶液的ph值,按Enter键确定
5.按▼键使得变送器界面显示为Slope(斜率),按→键进入斜率测定。将探头插入到另一种缓冲溶液中,待读数稳定后,按▲▼键将示数调为缓冲溶液的ph 值,按Enter键确定。此时,已完成两点校准。
* 为得到最佳校准结果,在稳定期间轻轻搅动缓冲液中的电极5秒钟。
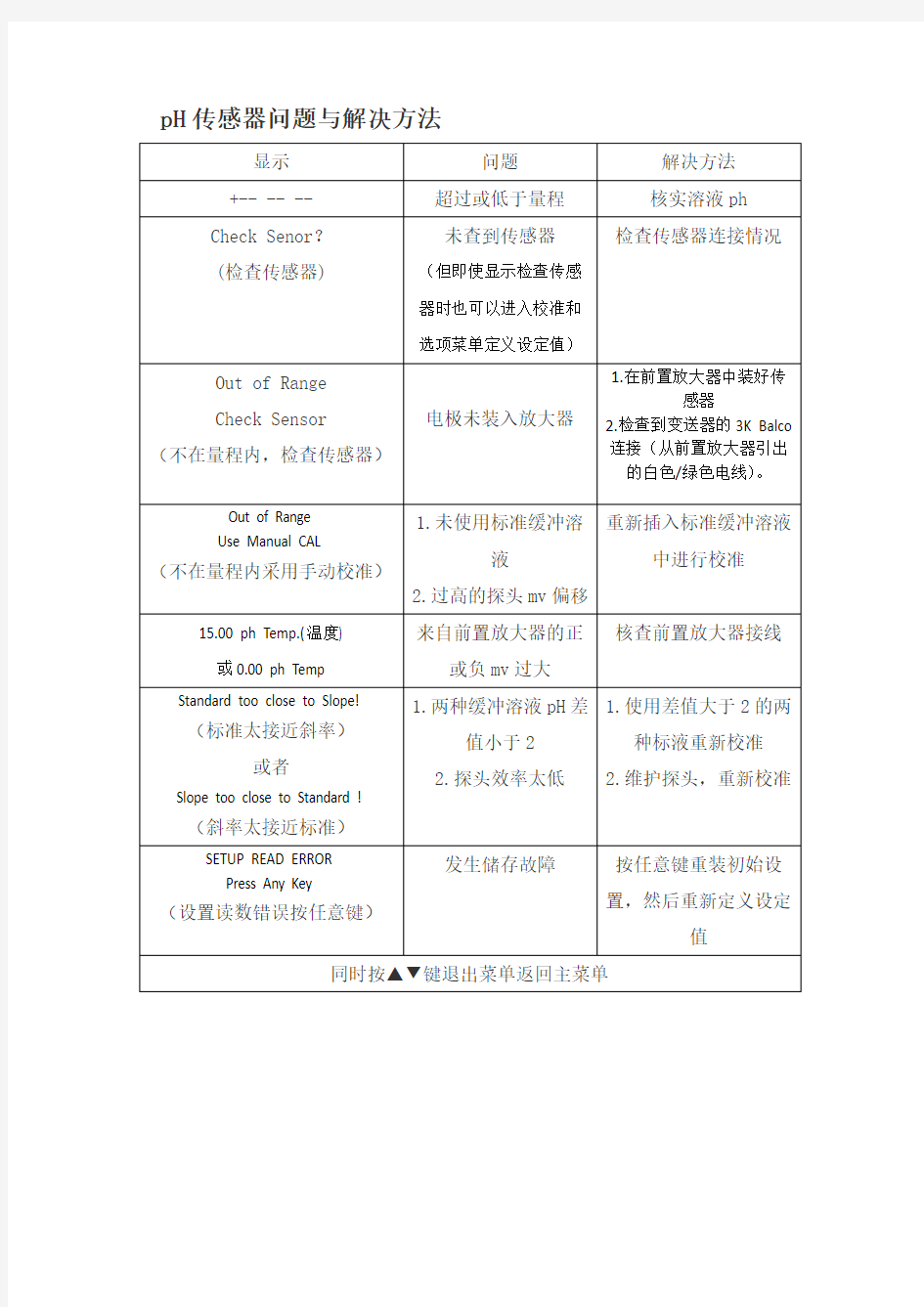
pH传感器问题与解决方法
位移传感器的更换及如何标定 更换步骤: 1.在确认位移传感器损坏的情况下,通知调度室摘牌作业,通知相关设备人员 关闭截门,进行缷压. 2.确认缷压后,缷下位移传感器。 3.在允许停电的情况下,断开24电源,摘除接线,并记清线的颜色,以免接新 线时出现错误,烧毁位移传感器。如果条件不允许停电,则要先摘除电源线,再摘除信号线。(最好摘线时,留一段磁尺线,以为接线根据颜色可以判断,节省时间,提高正确率) 4.确认缸体已装磁环,换上新的位移传感器,进行接线,先接正负时钟,正负 数据线,然后接电源线。接线完毕需重新确认接线正确性,确认后通知调度室,送电测试。 通常轧线所用位移传感器为六线制: BN 棕色+24V WH 白色0V GY 灰色- data PK 粉色+data YE 黄色+clock GN 绿色- clock 标定过程: 1.如果更换新位移传感器则需要找到相应的程序块进行重新标定,此程序块在 硬件输入里。
2.标定需要在线修改以下参数NFP , OFF 3.NFP参数为位移传感器的精度,在位移传感器说明书上即可读出 说明书上C所代表的数值即是位移传感器的精度。 例如:说明书上C所在位置注明为1,则需要将NFP值修改为5.0e-3,此值对应输出端YP应用单位为毫米,如果输出端YP用到的单位为米(具体单位要根据输出端YP连接到程序中的应用判断),则需要将5.0e-3改为5.0e-6 4.OFF值的修改需要根据量程范围确定 首先要判断位移传感器的零位,有的液压缸打到最大为0,有的液压缸打到最小为0.可以先把液压缸打到最大或最小时标定零位,然后打到相反的极限位置检查YP端显示值如果近似与量程极限,则标定完成,如果显示值为负数,则零位选择不正确,需重新判断最大还是最小时为零位。 零位的标定方法: 将液压缸打开到最大或最小,修改OFF值置0,将模块的输出YP端显示值复制到OFF中,这时YP端将显示近似为0。 例如量程为0—500mm的位移传感器,将液压缸打到最小时标定零位,然后将液压缸打到最大,YP端显示值为正数近似500,则说明标定正确完成;如果YP端显示值为负数,则需重新将液压缸打到最大时标定零位,然后将液压缸打到最小检测YP端显示值如果为正数近似500,则标定 注释: 精轧串辊缸位移传感器零位在中间位置,由设备插定位销确定,然后标定零位。
压力传感器(静态)检定规程 JJG 860—94 本规程主要起草人:许新民(航空工业总公司第304研究所) 郭春山(中国计量科学研究院) 张首君(中国计量科学研究院) 参加起草人:陈景文(航空工业总公司第304研究所) 目次 一概述 二技术要求 三检定条件 四检定项目和检定方法 五检定结果处理和检定周期 附录1 压力传感器检定记录格式 附录2 检定证书内容格式(1) 附录3 检定证书内容格式(2) 压力传感器(静态)检定规程 本检定规程适用于新制造、使用中和修理后的压力传感器的静态检定。 一概述 压力传感器是一种能感受压力,并按照一定的规律将压力转换成可用输出信号(一般为电信号)的器件或装置,通常由压力敏感元件和转换元件组成。 按压力测试的不同类型,压力传感器可分为表压传感器、差压传感器和绝压传感器等。 二技术要求 1压力传感器的准确度等级和允许基本误差应符合表1规定。 表1 2压力传感器的配套应完整,外观不应有影响计量性能的锈蚀和损伤。各部件应装配牢固,不应有松动,脱焊或接触不良等现象。 3压力传感器在外壳上或外壳的铭牌上应清楚地标明其型号和编号。压力传感器的名称、
测量范围、准确度等级、制造厂家、制造日期及工作电源可在外壳或铭牌上标明,或在相应的技术文件中说明。 4差压传感器的高压(+)和低压(-)接嘴应有明确的永久性标志。 5压力传感器的电源端和信号输出端应有明确的区别标志。 6重复性误差。压力传感器的重复性误差不得大于允许基本误差的绝对值。 7回程误差。压力传感器的回程误差不得大于允许基本误差的绝对值。 8线性误差。压力传感器的线性误差的绝对值不得大于允许基本误差的绝对值。非线性压力传感器对此不作要求。 三检定条件 9 压力标准器 压力标准器选择的基本原则是其基本误差的绝对值应小于被检压力传感器基本误差绝对值的1/3。准确度等级为0.05级的压力传感器允许采用一等标准器(±0.02%)作为压力标准器。 压力标准器可选用工作基准活塞式压力计、工作基准微压计、标准活塞式压力计、标准活塞式压力真空计、气体活塞式压力计、标准浮球式压力计、标准液体压力计、补偿式微压计、数字式压力计、精密压力表及其他相应准确度等级的压力计量标准器。 10 检定设备 10.1激励电源。激励电源应按压力传感器要求配套,除非压力传感器对激励电源稳定性无特殊要求,否则其稳定度应为被检压力传感器允许基本误差绝对值的1/5~1/10,可选用精密稳压电源、稳流电源、干电池或蓄电池等。 10.2读数记录装置。检定压力传感器用的读数记录装置基本误差的绝对值应小于被检压力传感器允许基本误差绝对值的1/5~1/10,可选用数字式电压表、数字式频率计、电流表等。 10.3其他设备。真空计、数字式气压计(或标准气压表)、温度计、湿度计、精密电阻箱等。 10.4与压力标准器配套使用的加压(或抽空)系统应在示值检定范围内连续可调。 11 环境条件 11.1检定时的环境温度视被检压力传感器的准确度等级而定,应符合下列要求: 0.01、0.02级20±1℃ 0.05级20±2℃ 0.1、0.2、0.5级20±3℃ 其他等级20±5℃ 11.2检定前,压力传感器应在检定的环境温度下放置2h以上,方可进行检定。 11.3相对湿度:小于80% 大气压力:86~106kPa 四检定项目和检定方法 12 外观检查 12.1使用中的压力传感器应有前次检定证书,新制造的或修理后的压力传感器应有出厂合格证书。 12.2检查压力传感器的外观应符合本规程第2~5条要求。
压力传感器检定: 1. 静态检定 2. 动态检定 我们把压力传感器的特性分成两类静态特性和动态特性。压力传感器静态特性的 主要指标是灵敏度、线性度、迟滞、重复性、精度、温度漂移和零点漂移等等。一般 我们校准压力传感器都是校准其静态特性,这是因为我们将压力传感器理想化,认为 其固有频率相当大而且本身无阻尼,这时压力传感器的静态特性和动态特性是一样 的。然而在被测压力随时间变化的情况下,压力传感器的输出能否追随输入压力的快 速变化是一个很重要的问题。有的压力传感器尽管其静态特性非常好,但由于不能很 好地追随输入压力的快速变化而导致严重的误差,有时甚至出现高达百分之百的动态 误差。所以我们必须要进行压力传感器动态特性的校准,认真分析其动态响应特性。 压力传感器动态特性可以用它的上升时间、固有频率、幅频特性、相频特性等参数来 描述。 线性度eL (非线性误差):输入输出校准曲线(实际)与选定的拟合直线之间的 吻合 程度; A x )00% y^s 重复性eR :正行程或反行程曲线多次测量时曲线的一致程度; 置信系数 a=2( 95.4%)或 a=3( 99.73%) 迟滞eH 正行程与反行程之间的曲线的不重合度;
dp =± _ % 线性度、迟滞反映 系统误差;重复性反映 偶然误差 根据检定规程一 《压力传感器静态》, 在校准精密 线性压力传 感器时给出 的校准曲 线有二种最小二乘直线和端点平移线。 动态检定: 1. 瞬态激励法(阶跃信号激励) 2. 正弦激励法(正弦信号激励) 动态检定指标、参数:频率响应、谐振频率、自振频率、阻尼比、上升时间、建立时 间、过冲量、灵敏度。 正弦激励法:正弦压力信号输入法是一种间接的检定方法,即被检定的压力传感器和 一个“参考”压力传感器相比较,而“参考”压力传感器具有理想的动态性能。正弦 压力激励法在高 频、高压时,正弦信号往往严重畸变。因此一般只能用于小压力或低 频围的检定。 xlOO% 贝塞尔公式 误差(三者反应系统总误 差)
电涡流位移传感器的原理及其静态标定方法电涡流是20世纪70年代以后发展较快的一种新型传感器,它广泛的应用在位移震动检测、金属材质鉴别,无损探伤等技术领域。 实验目的: 了解电涡流位移传感器的结构和工作原理。 了解电涡流位移传感器的静态标定方法。 实验原理 结构:变间隙式是最常用的一种电涡流传感器形式,它的结构很简单,由一个扁平线圈固定在框架上构成。线圈用高强度漆包铜线或银线绕成,用粘结剂粘在框架端部或是绕指在框架槽内。线圈框架应采用损耗小、电性能好、热膨胀系数小的材料,常用高频陶瓷、聚四氟乙烯等。由于激励频率较高,对所用的电缆和插头也要充分重视,一般使用专用的高频电缆和插头。 工作原理:在传感器线圈中通以高频电流,则在线圈中产生高频交变磁场。当到点被测金属板接近线圈,并置于线圈的磁场范围内,交变磁场在金属板的表面层内产生感应电流,即电涡流。电涡流又产生一个反向的磁场,减弱了线圈的原磁场,从而导致线圈的电感量、阻抗和品质因素发生变化,这些参数的变化与导体的几何形状、电导率、线圈的几何参数、电流的频率以及线圈与被测导体间的距离有关。如果控制上述参数的变化,在其他条件不变的情况下,仅是线圈与金属板之间距离的单值函数,从而达到测量位移间隙的目的。 测量电路 当传感器接近被测导体时,损耗功率增大,回路失谐,输出电压相应变小。这样,在一定范围内,输出电压幅值与间隙呈近似线性关系。由于输出电压的频率始终恒定,因此称为定频幅式。这种电路采用适应晶体振荡器,旨在获得高稳定度频率的高频激励信号,以保证
稳定的输出。 实验仪器与材料 电涡流位移传感器静态标定系统 Hz-8500探头前置器 8511型电涡流探头 电涡流传感器测量装置 高精度数字万用表。 实验内容: 实验一:被测金属板采用铝质板,测量U-x 关系曲线。 实验二:被测金属板仍采用铝质板,但直径较小,测量U-x 关系曲线。 实验三:被测金属板采用铁板,测量U-x 关系曲线。 5、实验数据: 实验一数据: 6、实验要求: 1、画出(实验一)中的U-x 关系曲线,确定传感器的线性工作范围计算传感器的灵敏度。答:线性工作范围:由画出的U-X关系曲线可以看出其线性工作范围在0~13 灵敏度:(15.4-1.78)/13=1.048
压力传感器的动态标定 一、实验目的: 1、熟悉记忆示波器和电荷放大器使用方法; 2、用标定激波管标定传感器的动态参数; 3、计算传感器幅频特性和相频特性。 三、测试仪器设备: 1、记忆示波器1台(TDS210); 2、CY-YD-205 1只,标定对象; 3、电荷放大器YE5850一台,连接石英压力传感器; 4、压电陶瓷传感器CY-YD-203T 1只; 5、电荷放大器KD5002 一台,连接压电陶瓷传感器,用于激波速度测量。 三、实验步骤: ( 1 ) 把石英传感器安装在激波管端壁上,并将石英传感器电缆接到电荷放大器YE5820的输入端,将YE5820的输出端电缆接到示波器ch2的输入端,并且将其上限频率置于100kHZ.灵敏度设在10pc/unit。打开YE5820电荷放大器(开关在背面),“工作/复位”开关置于“复位”位置。 ( 2 ) 把侧壁的压电陶瓷传感器接到电荷放大器KD5002的输入端,并将放大器KD5002的输出接到示波器1通道。将放大器的上限截至频率设在100kHZ,示波器ch1垂直标尺置于500mv/div,ch2的垂直标尺置于20mv/div。 采样频率的设定:考虑到传感器的固有频率约为120kHz,由Shannon 采样定律,F s≥ 2F i,取F s=500kS/s,即cm。也就是说水平标尺调节到500微妙/div为宜。 触发信源选ch1,上升沿单次触发,触发电平可调大一些,几十mv不成问题. ( 3 ) 激波管安装膜片,给气压机充气在4bar左右后,打开压气机阀门,将放大器置于“工作”,示波器”Ready”后, 打开激波管充气阀门,破膜,记录
标定与校准的概念 新研制或生产的传感器需要对其技术性能进行全面的检定,以确定其基本的静、动态特性,包括灵敏度、重复性、非线性、迟滞、精度及固有频率等。 例如,对于一个压电式压力传感器,在受力后将输出电荷信号,即压力信号经传感器转换为电荷信号。但是,究竟多大压力能使传感器产生多少电荷呢?换句话说,我们测出了一定大小的电荷信号,但它所表示的加在传感器上的压力是多大呢? 这个问题只靠传感器本身是无法确定的,必须依靠专用的标准设备来确定传感器的输入――输出转换关系,这个过程就称为标定。简单地说,利用标准器具对传感器进行标度的过程称为标定。具体到压电式压力传感器来说,我们用专用的标定设备,如活塞式压力计,产生一个大小已知的标准力,作用在传感器上,传感器将输出一个相应的电荷信号,这时,再用精度已知的标准检测设备测量这个电荷信号,得到电荷信号的大小,由此得到一组输入――输出关系,这样的一系列过程就是对压电式压力传感器的标定过程,如图1-19所示。 图1-19 压电式压力传感器输入――输出关系 校准在某种程度上说也是一种标定,它是指传感器在经过一段时间储存或使用后,需要对其进行复测,以检测传感器的基本性能是否发生变化,判断它是否可以继续使用。因此,校准是指传感器在使用中或存储后进行的性能复测。在校准过程中,传感器的某些指标发生了变化,应对其进行修正。 标定与校准在本质上是相同的,校准实际上就是再次的标定,因此,下面都以标定为例作介绍。 1.7.2 标定的基本方法 标定的基本方法是,利用标准设备产生已知的非电量(如标准力、位移、压力等),作为输入量输入到待标定的传感器,然后将得到的传感器的输出量与输入的标准量作比较,从而得到一系列的标定数据或曲线。例如,上述的压电式压力传感器,利用标准设备产生已知大小的标准压力,输入传感器后,得到相应的输出信号,这样就可以得到其标定曲线,根据标定曲线确定拟合直线,可作为测量的依据,如图1-20所示。
压力传感器的论文 合理进行压力传感器的误差补偿是其应用的关键。压力传感器主要有偏移量误差、灵敏度误差、线性误差和滞后误差,本文将介绍这四种误差产生的机理和对 测试结果的影响,同时将介绍为提高测量精度的压力标定方法以及应用实例。 目前市场上传感器种类丰富多样,这使得设计工程师可以选择系统所需的压力传感器。这些传感器既包括最基本的变换器,也包括更为复杂的带有片上电路的高集成度传感器。由于存在这些差异,设计工程师必须尽可能够补偿压力传感器的测量误差,这是保证传感器满足设计和应用要求的重要步骤。在某些情况 下,补偿还能提高传感器在应用中的整体性能。 本文以摩托罗拉公司的压力传感器为例,所涉及的概念适用于各种压力传感器的设计应用。 摩托罗拉公司生产的主流压力传感器是一种单片压阻器件,该器件具有3类: 1. 基本的或未加补偿标定; 2. 有标定并进行温度补偿; 3. 有标定、补偿和放大。 偏移量、范围标定以及温度补偿均可以通过薄膜电阻网络实现,这种薄膜电阻网络在封装过程中采用激光修正。 该传感器通常与微控制器结合使用,而微控制器的嵌入软件本身建立了传感器数学模型。微控制器读取了输出电压后,通过模数转换器的变换,该模型可以将电压量转换为压力测量值。 传感器最简单的数学模型即为传递函数。该模型可在整个标定过程中进行优化,并且模型的成熟度将随标定点的增加而增加。 从计量学的角度看,测量误差具有相当严格的定义:它表征了测量压力与实际压力之间的差异。而通常无法直接得到实际压力,但可以通过采用适当的压力标准加以估计,计量人员通常采用那些精度比被测设备高出至少10倍的仪器作为测量标准。 由于未经标定的系统只能使用典型的灵敏度和偏移值将输出电压转换为压力,测得的压力将产生如图1所示的误差。 这种未经标定的初始误差由以下几个部分组成: a. 偏移量误差。由于在整个压力范围内垂直偏移保持恒定,因此变换器扩散和激光调节修正的变化将产生偏移量误差。 b. 灵敏度误差,产生误差大小与压力成正比。如果设备的灵敏度高于典型值,灵敏度误差将是压力的递增函数(见图1)。如果灵敏度低于典型值,那么灵敏度误差将是压力的递减函数。该误差的产生原因在于扩散过程的变化。 c. 线性误差。这是一个对初始误差影响较小的因素,该误差的产生原因在于硅片的物理非线性,但对于带放大器的传感器,还应包括放大器的非线性。线性误差曲线可以是凹形曲线,也可以是凸形曲线。 d. 滞后误差:在大多数情形中,滞后误差完全可以忽略不计,因为硅片具有很高的机械刚度。一般只需在压力变化很大的情形中考虑滞后误差。 标定可消除或极大地减小这些误差,而补偿技术通常要求确定系统实际传递函数的参数,而不是简单的使用典型值。电位计、可调电阻以及其他硬件均可在补偿过程中采用,而软件则能更灵活地实现这种误差补偿工作。 一点标定法可通过消除传递函数零点处的漂移来补偿偏移量误差,这类标定方法称为自动归零。
力传感器标定及称重实验指导书 一. 实验目的 通过本实验了解和掌握力传感器的测量原理和方法。 二. 力传感器工作原理简介 电阻应变计是利用物体线性长度发生变形时其阻值会发生改变的原理制成的,其电阻丝一般用康铜材料,它具有高稳定性及良好的温度、蠕变补偿性能。测量电路普遍采用惠斯通电桥(如图1所示),利用的是欧姆定律,测试输出量是电压差。 图1 惠斯通电桥 本实验采用的电阻应变计采用的是惠斯通全桥电路,当物料加到载物台后,4个应变片会发生变形,产生电压输出,经采样后送到计算机由DRVI快速可重组虚拟仪器平台软件处理。因为电桥在生产时有一些误差,不可能保证每一个电桥的电阻阻值和斜率保持一致。所以,传感器在使用之前必须要经过线性校正,这是由于计算机得到的是经过采样后的数字量,与真实质量之间是一种线性关系,需要由标定来得到这个关系。 图2力传感器实物 在实验中采用的力传感器是LYB-5-A型应变力传感器具有精度高、复现性好的特点。其外形见图2。需要特别强调的是:由于力传感器的过载能力有限(150%),所以,在实际使用过程中应尽量避免用力压传感器的头部或冲击传感器。否则,极易导致传感器因过载而损坏! 三. 实验仪器和设备 1. DRVI可重组虚拟实验开发平台1套 2. 蓝津数据采集仪(LDAQ-EPP2)1套 3. 开关电源(LDY-A)1套 4. 称重台1个 四. 实验步骤及内容 1. 将称重台的传感器输出线与实验台上对应的接口相连。 2. 启动服务器,运行DRVI主程序,开启DRVI数据采集仪电源,然后点击DRVI快捷工具条上的“联机注册”图标,选择其中的“DRVI采集仪主卡检测”进行服务器和数据采集仪之间的注册。联机注册成功后,分别从DRVI工具栏和快捷工具条中启动“DRVI微型Web服务器”和“内置的Web服务器”,开始监听8600和8500端口。 3. 打开客户端计算机,启动计算机上的DRVI客户端程序,然后点击DRVI快捷工具条上的“联
模拟量阀门直线位移传感器标定方法 加压过滤机电控液动阀门分为两种,为开关量阀门和模拟量阀门.开关量阀门上装有接近开关,其作用是保证阀门开关到位时电机自动断电和开关信号的反馈;模拟量阀门(4个滤液阀)上不但装有能保证电机自动断电的接近开关,还另外装有直线位移传感器,其作用是能够反馈阀门的实际开度从而可以对阀门开度进行检测和控制,这里以行程为250的直线位移传感器为例,对直线位移传感器的标定方法做介绍. 一仪表的组成: 直线位移传感器为四线制仪表,由2部分组成,分别为安装在阀门体上的探杆和安装在阀门控制箱上的二次仪表. 二仪表的标定: 在安装好探杆之后,其标定工作主要是调整阀门控制箱上的二次仪表,二次仪表表盘如下图:
二次仪表背面端子图如下: 标定以及安装方法: 1. 按端子图,接线时将探杆(发讯头)的三根线按照高低总的顺序依次接入,将“相”“中”两个端子接入AC220V电源;将“1+”“2-”两个端子与PLC柜连接. 2. 标定前把接入PLC柜的两根线拆下,将电流表两个表笔接入两个端子,将电流表拨至mA档. 3. 把阀门控制箱里面的小型断路器合上,可以看到阀门控制箱电源指示灯亮,再将表盘上的电源按钮按下,看到数字显示表上有读数则标定准备工作完毕. 4. 将阀门就地箱转换开关拨至“就地”档,手动执行关阀门动作,观察并确认阀门已经关到位,调整表盘上的“调零”按钮直到表盘上的开度显示为-10.电流表显示4mA以下.
5. 手动执行开阀门动作,观察并确认阀门已经开到位,调整表盘上的“调满”按钮直到表盘上的开度显示为260.电流表显示20mA以上。 6. 重复步骤5,步骤4至少3次以上,保证开到位时开度260,关到位时开度-10,则标定完毕.表盘上“校正”“标定”2个旋钮不允许现场调试人员以及岗位司机私自调整.
燃气联试系统在正式工作之前要进行传感器校标;若测试现场环境发生变化,用户更有必要对传感器重新校标。 本系统用到的传感器有侧燃压力传感器和燃气压力传感器。 1.传感器校标特征图 图5.9 传感器校标特征 2.传感器校标计算公式 标定线的各点压强值对应的高度:(此处侧燃n =7,燃气n =8) 0h =4 04030201h h h h +++ 1h = 414131211h h h h +++ … … n h =2 21n n h h + (5-11) 定义各点压强对应的实际高度:(此处侧燃n =7,燃气n =8) 1P 时,1h -0h =△1h 2P 时,2h -0h =△2h
… … n P 时,n h -0h =△n h (5-12) 计算各标定压强间隔的内插系数:(此处侧燃n =7,燃气n =8) 1k =1 1h △P 2k = 2121 h - h P P -?? … … n k =1 -n n 1h -△h △--n n P P (5-13) 标定压强值求法: m P =1-n P +n K (m H -△1-n h ) (5-14) 其中,m H 为曲线上m 点至零线的高度; n K 为△1-n h 和△n h 之间的换算内插系数; 1-n P 为对应于△1-n h 的压强标定值; m P 为对应m H 高度求得的压强值。 传感器非线性计算公式: △h h △n △h n i n -i ╳100% (5-15) 其中,n 为标定线上的最大台阶数; △n h 为最大标定高度; i h △为第i 阶段的标定高度; i 为标定线是任一个阶梯(i =1、2、3…n ) 计算各点值,取其最大值表示传感器非线性值。 传感器滞后性(迟滞)参数计算公式: i2i1i4i3n 1(h -h h -h ) 4h ??+???╳100% (5-16)
压力传感器检定: 1.静态检定 2.动态检定 我们把压力传感器的特性分成两类静态特性和动态特性。压力传感器静态特性的 主要指标是灵敏度、线性度、迟滞、重复性、精度、温度漂移和零点漂移等等。一般 我们校准压力传感器都是校准其静态特性,这是因为我们将压力传感器理想化,认为 其固有频率相当大而且本身无阻尼,这时压力传感器的静态特性和动态特性是一样的。然而在被测压力随时间变化的情况下,压力传感器的输出能否追随输入压力的快速变 化是一个很重要的问题。有的压力传感器尽管其静态特性非常好,但由于不能很好地 追随输入压力的快速变化而导致严重的误差,有时甚至出现高达百分之百的动态误差。所以我们必须要进行压力传感器动态特性的校准,认真分析其动态响应特性。压力传 感器动态特性可以用它的上升时间、固有频率、幅频特性、相频特性等参数来描述。 迟滞e H:正行程与反行程之间的曲线的不重合度; 线性度e L(非线性误差):输入输出校准曲线(实际)与选定的拟合直线之间的吻合程度; 重复性e R:正行程或反行程曲线多次测量时曲线的一致程度; 置信系数a=2(%)或a=3(%) 贝塞尔公式 线性度、迟滞反映系统误差;重复性反映偶然误差。 误差(三者反应系统总误差)e S:e S=±√e H2+e L2+e R2 或e S=e H+e L+e R 根据检定规程一《压力传感器静态》,在校准精密线性压力传感器时给出的校准曲线有二种最小二乘直线和端点平移线。 动态检定: 1.瞬态激励法(阶跃信号激励) 2.正弦激励法(正弦信号激励) 动态检定指标、参数:频率响应、谐振频率、自振频率、阻尼比、上升时间、建立时间、过冲量、灵敏度。
位移传感器的设计与系统标定综合实验 马杭 (上海大学理学院力学系,上海200436) An experiment by design and system calibration of displacement sensor for purpose of teaching Ma Hang (Department of Mechanics, College of Sciences, Shanghai University, Shanghai 200436) 摘要:本文介绍了新开发的综合型教学实验——位移传感器的设计及位移测试系统的标定实验的主要内容。进行该项实验,要求学生灵活应用所学的知识,得到动手、动脑的综合训练,进一步巩固和掌握所学知识并通过实验获取新的知识和能力,了解传感器这一科学研究与工程测量中重要器件的设计与制造的一般过程,起到举一反三的效果。 关键词:位移传感器,双悬臂梁,电阻应变计,电测,系统标定 传感器是科学实验与工程测量中常用的测量器件,用来把相关的物理量如温度、压力、浓度、载荷等转变成具有确定对应关系的电量输出,以满足对于信息的记录、显示、传输、存储、处理以及控制的要求。传感器种类繁多,发展日新月异,是实现自动测量与控制的第一个环节,在生产实践和科学研究的各个领域中发挥着极其重要的作用。以电测技术为基础的传感器是各类传感器中最常见的一类,结合力学类专业的学习特点以及本实验室的条件,我们设计开发了位移传感器的设计及位移测试系统的标定实验,并给我校力学专业的本科生和研究生进行了开设。 本实验要进行设计和制作的传感器是一种双悬臂梁式位移传感器(也叫引伸计),用于测量亚毫米级的微小位移,它利用电阻应变计作为敏感元件,利用钛合金微梁作为弹性元件,并利用电桥作为基本测量电路,利用静态数字电阻应变仪作为放大与输出仪器,这些元件和仪器与记录仪器共同组成了位移测试系统,可以实现对静态小位移的测量。 实验的主要内容有三个,分别为传感器的设计、制作和标定。传感器的设计也分为三个部分,即结构设计、组桥设计和理论灵敏度的计算。如图1所示,从结构设计方面说,当给定了测量范围或量程(即刀口移动的距离)以后,首先要考虑的问题是结构的形式和尺寸,其次要考虑的是弹性元件的材料选择、受力和材料的工作范围。传感器的受力至少应当能够
本技术公开了一种手机侧边压力传感器校准方法,该方法通过按压两个传感器中间的点,获取两个传感器端的压力值,以此为基础,把相邻两个压力传感器的校准系数比例关系,再根据相邻压力传感器的比例关系,最终得到所有传感器间的比例关系,通过该比例关系进行压力传感器的校准。通过本技术可以在没有专业校准设备的情况下,获得各传感器的相对校准系数,由此实现快速、准确地校准。 技术要求 1.一种手机侧边压力传感器校准方法,其特征在于该方法通过按压两个传感器中间的点,获取两个传感器端的压力值,以此为基础,把相邻两个压力传感器的校准系数比例关 系,再根据相邻压力传感器的比例关系,最终得到所有传感器间的比例关系,通过该比 例关系进行压力传感器的校准。 2.如权利要求1所述的手机侧边压力传感器校准方法,其特征在于该方法包括如下步骤: 101、启动校准功能后,用户按压第一传感器和第二传感器中间位置201,分别读出四个 压力传感器的信号值为A1,A2,A3,A4; 102、按压第二传感器和第三传感器中间位置202得到B1,B2,B3,B4;
103、按压第三传感器和第四传感器中间位置203,等到C1,C2,C3,C4; 104、计算,获取各传感器的相对校准系数。 105、然后通过相对校准系数,可以精确获知用户按压了什么位置,以此进行校准。 3.如权利要求2所述的手机侧边压力传感器校准方法,其特征在于所述104步骤中,利用公式P1=R1*A1,其中P1为传感器1处的压力值,R1为传感器101的校准系数,A1为传感器101输出的信号量; 当按压两个传感器中间位置201时,传感器101与102感受到的压力值是相同的即: P1=P2R1*A1=R2*A2R2=R1*A1/A2 依此类推: 当按压两个传感器中间位置202时,P2=P3R2*B2=R3*B3R3=R2*B2/B3 当按压两个传感器中间位置203时,P3=P4R3*C3=R4*C4R4=P3*C3/C4 由于测定按压位置的识别只有两个通道间的压力比例相关,与压力大小无关。 因此我们可以设定R1为1.0,则: R1=1.0; R2=A1/A2; R3=(A1/A2)*(B2/B3); R4=(A1/A2)*(B2/B3)*(C3/C4)。 技术说明书 一种手机侧边压力传感器校准方法 技术领域
《自动检测技术》实验指导书 北京交通大学机电学院测控系 2006年9月
实验一压力传感器的静态标定实验 一、实验目的要求 1、了解压力传感器静态标定的原理; 2、掌握压力传感器静态标定的方法; 3、确定压力传感器静态特性的参数。 二、实验基本原理 传感器的标定,就是通过实验建立传感器输入量和输出量之间的关系,同时也确定出不同使用条件下的误差关系。压力传感器的静态标定,主要指通过一系列的标定曲线得到其静态特性指标:非线性、迟滞、重复性和精度等。 三、实验系统 1、系统连接 2、实验设备 活塞式压力计(型号:YS/YU-600型)、标准压力表(精度:0.4级,量程:0~10MPa)、被标定的压力传感器(型号:AF1800,量程:0~10MPa)、数字万用表、标准砝码、工作液体(蓖麻油)。
3、活塞式压力计结构原理 测量活塞以及砝码的重力与螺旋压力发生器共同作用于密闭系统内的工作液体,当系统内工作液体的压力与此重力相平衡时,测量活塞1将被顶起而稳定在活塞筒3内的任一平衡位置上。这时有压力平衡关系: g m m A p )(1 0+= 式中:p 为系统内的工作液体压力;m 与m 0分别为活塞与砝码的质量;g 为重力加速度;A 为测量活塞的有效面积。对于一定的活塞压力计,A 为常数。 在承重托盘上换不同的砝码,由螺旋压力发生器推动工作活塞,工作液体就可处于不同的平衡压力下,因此可以方便而准确地由平衡时所加的砝码和活塞本身的质量得到压力p 的数值。此压力可以作为标准压力,用以校验压力表。如果把被校压力表6上的示值与这一准确的压力p 相比较,便可知道被校压力表的误差大小。也可以关闭a 阀,在b 阀上部接入标准压力表,由压力发生器改变工作液压力,比较被校表和标准表上的示值进行校准。同样,将被校压力表换成压力传感器,就可以通过比较压力传感器测量的压力值和标准表上的示值进行校准,对压力传感器进行静态标定。 4、扩散硅压力传感器 扩散硅压力传感器在单晶硅的基片上扩散出P 型或N 型电阻条,接成电桥。在压力作用下,根据半导体的压阻效应,基片产生压力,电阻条的电阻率产生很大变化,引起电阻的变化,把这一变化引入测量电路。则其输出电压的变化反映了所受到的压力变化。 四、实验方法和要求 1、根据实验设备设计实验电路连线图,装配、检查各种仪器、传感器及压 力表。 2、检查实验电路及油路。
线位移传感器动态参数校准规范 1 范围 本校准规范规定了对线位移传感器实验室环境下的动态参数进行校准的计量特性、校准条件、校准项目、校准方法、校准结果的处理及复校时间间隔。 本校准规范适用于新制造(或购置)、使用中、修理后的线位移传感器动态参数校准。 2 引用文件 本校准规范引用下列技术条件 JJF 1001-2011 通用计量术语及定义技术规范。 JJF 1059.1-2012 测量不确定度评定与表示。 JJF 1094-2002 测量仪器特性评定。 GB/T 7665-2005 传感器通用术语。 GB/T 30111-2013 位移传感器通用规范。 GB/T 18459-2001 传感器主要静态性能指标的计算方法。 GJB 8137-2013 位移传感器标定与精度测试方法。 JJF 1305-2011 线位移传感器校准规范。 注:凡是注日期的引用文件,仅注日期的版本适用于本规范;凡是不注日期的引用文件,其最新版本(包括所有的修改版)适用于本规范。 3 术语和计量单位 3.1 术语 3.1.1 线位移传感器linear displacement sensor 能够感受长度尺寸变化并转换为可用输出信号的器件。 3.1.2 动态特性dynamic characteristic 与响应于被测量随时间变化有关的传感器特性。 3.1.3 动态示值误差dynamic error of indication
线位移传感器示值与对应输入量的真值之差。 3.1.4 动态重复性dynamic repeatability 在相同测量条件下,对同一被测量进行连续多次测量所得结果之间的一致性。 3.1.5 分辨力resolution 线位移传感器能够有效辨别的最小位移量。 3.1.6 响应时间response time 由被测量的阶跃变化引起的传感器输出上升到其最终规定百分率时所需要的时间。 注:为注明这种百分率,可将其置于主词前面,例如:98%响应时间。 3.1.7 频率响应frequency response 在规定的被测量频率范围内,对加在传感器上的正弦变化的被测量来说,输出量与被测量振幅之比及输出量和被测量之间相差随频率的变化。 注:频率响应应当以在规定的被测量频率范围内的频率和某一规定的被测量为基准。 3.1.8 动态测量范围dynamic full scale output 在保证性能指标的前提下,用最大被测量和最小被测量表示的区间。 4 概述 线位移传感器可用来测量位移、距离、位置和应变量等长度尺寸,在工程测试中应用广泛。典型的线位移传感器可以分为接触式传感和非接触式传感。线位移传感器输出信号种类多,绝大部分线位移传感器输出电信号,如不同频率的脉冲信号、电压或电流等模拟量;也有些线位移传感器已集成了信号转化功能,能直接以数字方式或其他方式输出长度尺寸。 典型的线位移传感器的结构示意图如下。 图1 一种线位移传感器示意图 1—测杆;2—外壳;3—信号输出线缆
I C S17.160;19.060 N73 中华人民共和国国家标准 G B/T37776 2019 动态力传感器校准方法冲击力法校准 M e t h o d s f o r t h e c a l i b r a t i o no f d y n a m i c f o r c e t r a n s d u c e r s C a l i b r a t i o nb y s h o c k f o r c e 2019-08-30发布2020-03-01实施 国家市场监督管理总局
前言 本标准按照G B/T1.1 2009给出的规则起草三 本标准由全国机械振动二冲击与状态监测标准化技术委员会(S A C/T C53)提出并归口三 本标准起草单位:中国航空工业集团公司北京长城计量测试技术研究所二中国计量科学研究院二苏州东菱振动试验仪器有限公司二浙江省计量科学研究院三 本标准主要起草人:曹亦庆二李善明二孟峰二何旋二杨军二徐曼二曾利民三
动态力传感器校准方法冲击力法校准 1范围 本标准规定了使用冲击力法对动态力传感器进行校准的方法和操作程序三 本标准适用于冲击力峰值为20N~200k N,冲击力脉冲持续时间为0.5m s~10m s范围内所给出的动态力传感器冲击力灵敏度的校准三 2规范性引用文件 下列文件对于本文件的应用是必不可少的三凡是注日期的引用文件,仅注日期的版本适用于本文件三凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件三 G B/T2298 2010机械振动二冲击与状态监测词汇(I S O2041:2009,I D T) G B/T7665 2005传感器通用术语 G B/T13823.20 2008 振动与冲击传感器的校准方法加速度计谐振测试通用方法(I S O5347-22:1997,I D T) G B/T20485.1 2008振动与冲击传感器校准方法第1部分:基本概念(I S O16063-1:1998, I D T) G B/T20485.13 2007振动与冲击传感器校准方法第13部分:激光干涉法冲击绝对校准(I S O16063-13:2001,I D T) G B/T20485.22 2008振动与冲击传感器校准方法第22部分:冲击比较法校准(I S O16063-22:2005,I D T) 3术语及定义 G B/T2298 2010二G B/T7665 2005二G B/T20485.1 2008界定的以及下列术语和定义适用于本文件三 3.1 有效质量e f f e c t i v em a s s 作用于力传感器敏感面上的,在冲击运动过程中以自身惯性力参与加载的所有部件质量的总和三注:主要包括质量块二连接附件和测量传感器等三 4测量不确定度 4.1采用绝对法复现冲击加速度运动 冲击力灵敏度的测量不确定度: 在设定参考冲击力峰值10k N,参考冲击力脉冲持续时间2m s和放大器参考增益时,为读数 的2%; 对所有冲击力峰值二脉冲持续时间,不超过读数的10%三
压力传感器与压力变送器的标定 一、实验目的 1.了解扩散硅压阻式压力传感器测量压力的原理和方法; 2.学习掌握简单的运算放大电路; 3.了解差压变送器测量压力的原理,掌握变送器的标定方法; 4.了解变送器二线制和四线制接线的不同。 二、实验原理 1.扩散硅压阻式压力传感器实质是硅杯压阻传感器。它以N型单晶硅膜片作敏感元件,通过扩散杂质使其形成4个P型电阻,形成电桥。在压力作用下根据半导体的压阻效应,基片产生应力,电阻条的电阻率产生很大变化,引起电阻的变化,使电桥有相应输出。 2.仪表的静态特性是衡量仪表品质好坏的的基本指标。它包括仪表的量程、精度、线性度、回差、灵敏度和灵敏限等。根据压力变送器的测量原理,标定出压力变送器的静态特性。 三、实验设备 CSY-2000A实验台、精密压力表、压阻式压力传感器、压力传感器实验模板、加压球(气压源)、CYB-500K差压变送器(量程0~50KPa)、气体连接导管、电信号连接导线。 四、实验步骤与说明 (一)扩散硅压阻式压力传感器的压力标定 (1)连接气体管路:根据图3-1连接气体管路,其中压缩泵、贮气箱、流量计在CSY-2000A实验台内部已经接好。将气体三通连接导管中硬管一端插入主控台上的气源快速插座中。其余两根导管分别与精密压力表的输出端口(左侧)和压阻式压力传感器的气咀接通。 注意:①压阻式压力传感器两只气咀中,一只为高压咀,另一只为低压咀。当高压咀接入正压力时,输出为正,反之为负,若输出负时可调换气咀。②精密压力表上有两个旋钮,此部分这两个旋钮都必须拧紧。 图3-1 扩散硅压阻式压力传感器的压力标定气路连接图
(2)连接电路部分:为减少干扰,可将将压阻式压力传感器的四端接头按端口编号接到压力传感器实验模板上,再根据原理图3-2连接电路部分。注意,压阻式压力传感器的3、1端接+4V稳压电源。 说明:①压阻式压力传感器电路部分为四线制连接,其中3端、1端为传感器电源端(3端为正,1端为负),2端、4端为传感器信号输出端(2端为正,4端为负)。②注意不同电压信号的地端保持一致。 图3-2 扩散硅压阻式压力传感器的压力标定电路连接原理图 (3)调整零点:检查接线无误后,打开CSY-2000A实验台上的电源开关,调节压力传感器实验模板上R W2,使数显表显示为零。 说明:压力传感器实验模板上的R W1用于调节放大倍数,R W2用于调节零位。 (4)压力传感器性能测定:打开CSY-2000A实验台上的气源开关,启动压缩泵,可在精密压力表上读出储气箱的压力。轻微转动流量计旋钮,可发现储气箱压力随流量增大而减小。仔细逐步转动流量计旋钮,使储气箱压力在4-12Kpa之间,压力每上升1Kpa时,记录相应数显表的示值,填入表3-1。 表3-1 调校前压力传感器输出数显与输入压力值 (5)把此压力测量系统标定成压力计:给压阻式压力传感器输入4Kpa气压,调节R W2使数显表显示0.400V,输入12 Kpa气压,调节R W1使数显表显示1.200V,反复调节R W2、R W1直到达到足够的精度。使储气箱压力在4-12Kpa之间,压力每上升1Kpa时,记录相应数显表的示值,填入表3-2。 表3-2 调校后压力传感器输出数显与输入压力值 (6)关闭主控台上的气源开关、关闭主控台上的电源开关,拔下连接导线、导管。 警告:必须用双指按住气源快速接头边缘向内压,才能轻松拔出导管,请勿野蛮操作。 (二)差压式压力变送器的标定 (1)连接气体管路:将加压球(气压源)上的单向阀门拧松后,用橡皮管与精密压力表的气源端(右侧)相连,压力表的输出端(左侧)用橡皮管与差压变送器的高压咀(+)相连。 注意:①差压变送器两只气咀中,一只为高压咀,另一只为低压咀。当高压咀接入正压力时,输出为正,反之为负,若输出负时可调换气咀。②精密压力表上有两个旋钮,此部分中左侧输出端上的旋钮必须拧紧,右侧气源端上的旋钮必须松开。 (2)连接电路部分:根据图3-3用导线将差压变送器与实验台上的+24V电源、mA表输入口串联起来。
本文由zhangyufei_123贡献 doc1。 温度压力计的标定算法及软件实现 1.引言 存 储式井温压力计是一种高精度、高分辨率的井下温度和压力测试系统。它可 以完成对井下温度和压力情况的长时间持续监测,尤其适用于测试油井流压、静 压和压力 恢复的任务中。但是国内存储试压力计的大都采用最小二乘法标定仪 器,精确度不高,万分之 5 也很难达到。本文从压力计的标定算法入手,采用离 散点数据逼近的 原理,利用更高次的数值逼近的算法,提高压力计的测量精度。 2.存储式井温压力计简介 存储式井温压力计系统(以后简称压力计系统)可以相对独立的分为硬件系统和 软件系统两部分。 软硬件系统之间是基于特定的通讯协议并通过串口进行数据 交换。 软件系统负责标定硬件系统,对硬件系统设置参数,读取硬件采集的数据并进行 数据解释处理。串口通讯程序是整个软件的最底层,数据处理、图形绘制和仪器 标定都是通过它与硬件仪器交换数据的,这段程序与通讯协议有关。 硬件系统工作于井下,由 PIC 单片机芯片控制压力、温度传感器采样数据,并将 数据存储于存储芯片中或直接发送给软件系统, 该单片机的程序严格按照通讯协 议编写,与软件系统的串口通讯程序进行互操作。 在 数据处理过程中有下列名词。测量数据就是原始数据,是直接由硬件仪器采 集的通过二进制转化为十进制的计数值数据。工程数据,就是将原始数据带入一 定的公式 计算后,得到的与原始数据对应的一个数据。标准数据则是在标定过 程中使用的,如标准压力,标准温度等。在数据处理过程中,我们测量的工程数 据都是标准数据 的逼近值。 3.压力计系统的数据处理公式 仪器采集的数据是原始数据,原始数据向工程数据的转化是软件的主要任务,转 化过程利用数学公式表示为: Ve = f (Vo ) 表示原始值; 表示工程值; ( )表示函数关系式。 通过实验数据来确定上述公式的函数关系式 f()的过程就是仪器标定的过程。将 试井中测量的原始数据利用函数关系式 f()计算出工程数据的过程就是数据解 释的过程。 通常温度传感器的稳定性比较好,受外界干扰的因素少,通过实验温度原始数据 与工程数据的对应关系满足线性关系。 Vte = K * (Vto ? B) (公式 1) 根据上述公式,试验只需要从试验数据中选取两组值,即可计算出关系式中的常 数系数 K 和 B 得值。因此对温度的标定非常简单。 压 力的标定是比较复杂的。由于压力传感器的一般采用电气特性的设计原理, 不管采用电位器的特性,还是电阻应变片的特性,在高温下,都会随温度的升高 而使恒定 的压力在经过传感器采集后产生飘移,这就是温飘现象。这种现象的 存在,如果不对其进行补偿,肯定会影响到压力测量的准确度以及精度。 表 1 中的数据是已实现的标定软件在标定过程中记录的测量数据, 首行首列都是 标定用到的标准数据,表中为试验采集的测量数据。表中数据可以看出压力传感 器采 集的数据受到温度的影响,产生温飘现象。所以在计算压力工程值的过程 中必须考虑到温度对工程值的影响,需要温度对其进行补偿。 利用离散数据的最佳平方逼近理论, 当 ( 是未知数的个数, 是参与运算的向 量的维数)时的最佳平方逼近公式: 温度值 C) 30.0000 (。 压力(MPa) 频率 1 (KHz) 0.0000 2.0052 5.0000 2.1103 10.0000 2.2203 20.0000 2.4387 30.0000 2.6560 40.0000 2.8740 50.0000 3.0910 55.0000 3.2000 60.0000 3.3080 表 1 压力标定实验数据表 50.0000 频率 2 (KHz) 1.9960 2.1037 2.02133 2.4325 2.6527 2.8718 3.0910 3.2008 3.3100 80.0000 频率 3 (KHz) 1.9790 2.0892 2.2007 2.4238 2.6475 2.8697 3.0938 3.2050 3.3158 100.0000 频率 4 (KHz) 1.9667 2.0782 2.1915 2.4170 2.6432 2.8683 3.0942 3.2067 3.3190 120.0000 频率 5 (KHz) 1.9550 2.0670 2.1812 2.4100 2.6390 2.8665 3.0957 3.2095 3.3232 利用矩阵的运算可以计算出系数 的值。最后得出: , 就是压力值 Y 的最佳平方逼近。因此在压力数据处理中,测量并利用公式 2 计算 出的 值来近似表示标准的压力值,因此公式中 的取值越接近 , 对 Y 的逼近程 度越高,但同时对逼近离散点之间的值的逼近有一定的负面影响,因此 的取值 应该综合考虑这方面的影响。而标定的过程就是利用公式 2 确定 系数的过程。 4.