
第三章 平面问题的有限元法作业
1. 图示一个等腰三角形单元及其节点编码情况,设μ=0,单元厚度为t 。求 1)形函数矩阵[]N ;2)应变矩阵[]B ;3)应力矩阵[]S 。
4
第1题图 第2题图
2. 如题图所示,结构为边长等于a 的正方形,已知其节点位移分别为:11(,)u v 、
22(,)u v 、33(,)u v 、44(,)u v 。试求A 、B 、C 三点的位移。其中A 为正方形形心,B 为三角形形心。
3.直角边边长为l 的三角形单元,如题图所示。试计算单元等效节点载荷列阵(单元厚度为t ,不计自重)。
第3题图 第4题图
4. 如题图所示,各单元均为直角边边长等于l 的直角三角形。试计算(1)单元等效节点载荷列阵;(2)整体等效节点载荷列阵。已知单元厚度为t ,不计自重。
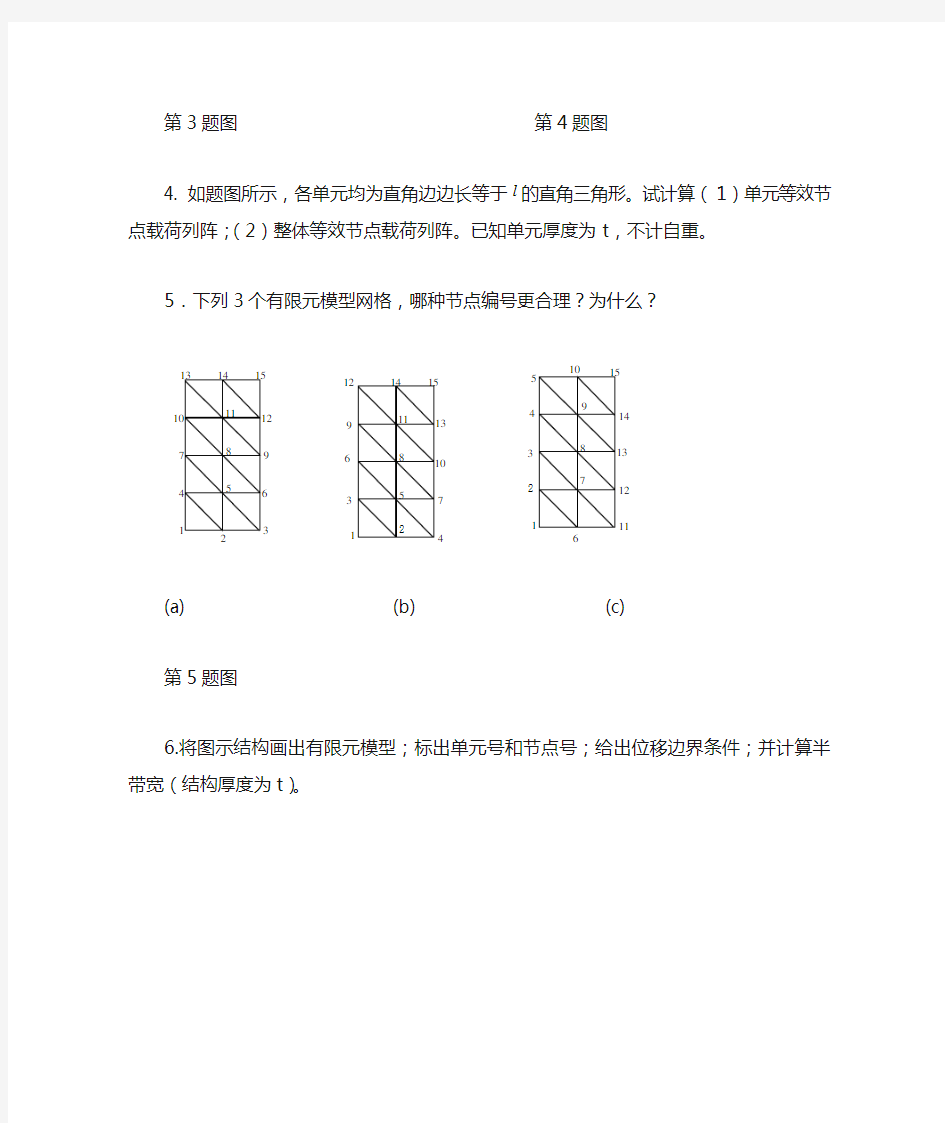
5.下列3个有限元模型网格,哪种节点编号更合理?为什么?
9
34
6
7912
11
34
6
12142
(a) (b) (c)
第5题图
6.将图示结构画出有限元模型;标出单元号和节点号;给出位移边界条件;并计算半带宽(结构厚度为t )。
2a
(a) (b) 无限长圆筒 (c) 第6题图
7. 结构如图所示,已知结构材料常数E 和 ,单元厚度为t 。利用结构的对称性,采用一个单元,分别计算节点位移和单元应力。
第7题图
答案:
1. 1)形函数
i x N a =
, j y N a = , 1m x y N a a
=-- 2)应变矩阵
[]1000101
000101011011B a -????=-??--????
3)应力矩阵
[]100010100
01
0111
110022
2
2S a ?
???-?
?=-????-
-?
??
?
2. A 点的位移为
()2312A u u u =
+ , ()231
2A v v v =+ B 点的位移为
()24313B u u u u =
++ , ()2431
3B v v v v =++ C 点的位移为
()1223C a u u u =
+ , ()C 1223
a
v v v =+ 3. 单元等效节点载荷列阵为
{}11
11
00003
663
T
e
i j i j
R q q q q ??
=++??
??
4. (2)整体等效节点载荷向量为
{}111100006
322T
R qlt P qlt P P
qlt qlt ??
=-???? 7. (1) 减缩后的整体刚度方程
22
12
2
1222
22221110222021102(1)2
2102x x b b ab R b ab b P v Et
ab a b ab ab R v b a μμμ
μμμμμμ---??-
-
??????????--??????
-???
?=????---+
+?
????
?????????-????+??
?
? 节点位移
22(1)
Pb v Eat
μ+=- , 22
12212b a v v b
μ-+
=
单元应力为
{}()2122
201012bv E bv bv ab av μσμμ???? ???-?? ?
????=+-???? ?-???? ?
-????-
????
?
姓名:学号:班级:
有限元分析及应用作业报告 一、问题描述 图示无限长刚性地基上的三角形大坝,受齐顶的水压力作用,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下几种计算方案进行比较: 1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算; 2)分别采用不同数量的三节点常应变单元计算; 3)当选常应变三角单元时,分别采用不同划分方案计算。
二、几何建模与分析 图1-2力学模型 由于大坝长度>>横截面尺寸,且横截面沿长度方向保持不变,因此可将大坝看作无限长的实体模型,满足平面应变问题的几何条件;对截面进行受力分析,作用于大坝上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力,满足平面应变问题的载荷条件。因此该问题属于平面应变问题,大坝所受的载荷为面载荷,分布情况及方向如图1-2所示,建立几何模型,进行求解。 假设大坝的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3 三、第1问的有限元建模 本题将分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算。 1)设置计算类型:两者因几何条件和载荷条件均满足平面应变问题,故均取Preferences为Structural 2)选择单元类型:三节点常应变单元选择的类型是PLANE42(Quad 4node42),该单元属于是四节点单元类型,在网格划分时可以对节点数目控制使其蜕化为三节点单元;六节点三角形单元选择的类型是PLANE183(Quad 8node183),该单元属于是八节点单元类型,在网格划分时可以对节点数目控制使其蜕化为六节点单元。因研究的问题为平面应变问题,故对Element behavior(K3)设置为plane strain。 3)定义材料参数 4)生成几何模 a. 生成特征点 b.生成坝体截面 5)网格化分:划分网格时,拾取所有线段设定input NDIV 为10,选择网格划分方式为Tri+Mapped,最后得到200个单元。 6)模型施加约束: 约束采用的是对底面BC全约束。 大坝所受载荷形式为Pressure,作用在AB面上,分析时施加在L AB上,方向水平向右,载荷大小沿L AB由小到大均匀分布(见图1-2)。以B为坐标原点,BA方向为纵轴y,则沿着y方向的受力大小可表示为: ρ(1) = gh P- =ρ g = - 10 {* } 98000 98000 (Y ) y
题目:为一个受到集中力P 作用的结构,t=1,试按平面应力问题计算,采用三角形单元,求出节点位移。 假设E 为弹性模量,泊松比ν=61,m N P y 16=,t=1cm,平面应力问题 将结构划成单元,并对其编号。 (1)定义单元
单元定义和有关数据见下表。 j i m j i m i m j i m j m j i m j i x x c y y b x x c y y b x x c y y b +-=-=+-=-=+-=-=,,, 编程为:betai = yj-ym; betaj = ym-yi; betam = yi-yj; gammai = xm-xj; gammaj = xi-xm; gammam = xj-xi; 依次代入节点的坐标求得下表:
i j m △i b j b m b i c j c m c 单元号① 1 (0,1) 2 (0, 0) 3 (1,1) 2 1-1 0 1 1 -1 0 ② 2 (0,0) 4 (1, 0) 3 (1,1) 2 1-1 1 0 0 -1 1 ③ 3 4 5 2 10 -1 1 1 -1 0
(1,1) (1,0) (2,0) ④ 3 (1,1) 5 (2,0) 6 (2,1) 21 -1 0 1 0 -1 1 (2)求各单元的刚度矩阵 从上表可以看出,4个单元刚度不同 单元①的刚度矩阵为: ???? ??????=333231232221 131211 1K K K K K K K K K K ()3,2,1===m j i 其中子矩阵表达式为: ???? ??????-+-+-+-+?-=s r s r s r s r s r s r s r s r rs b b v c c c b b c b c c b c c v b b Et K 21212121)1(42ννννν()m j i s r ,,,=
??????? ????? ???グ?? ? ??? ????φ??? ????φ??? ????φ??? ??? 1 Corresponding author: zzq_890709@https://www.doczj.com/doc/3c12099328.html,
?? Contents 0 ????????????? (2) 0.1 ?????? (2) 0.2 ????????? (2) 0.3 ?????? (3) 1????????仈 (4) 1.1 ???? (4) 1.2 ?????????????? (5) 1.3 ???? (7) 1.4 ???????ウ (13) 2 ???????????仈 (14) 2.1 ???? (14) 2.2 ???? (15) 2.3 ???? (16) 3 й???????????仈 (19) 3.1 ??????? (19) 3.2 ?????????????? (19) 3.3 ???? (20) 3.4 ???????ウ (22) 4 ??????????仈 (23) 4.1 ???? (23) 4.2 ???? (24) 4.3 ???? (25) 5 ??????????????仈 (32) 5.1 ???? (32) 5.2 ???? (33) 6 ???仈 (39) 6.1 ???? (39) 6.2 ??傼? (41) 6.3 ???? (44) 6.4 ???? (45) 7 ?? (48)
0 ????????????? 0.1 ?????? ????????????????лй??僔? 1????——?????????????Gambit. 2??????——????Matlab??????? 3????——??Matlab??.dat?????Tecplot??? 0.2 ????????? ?0 Matlab????????? ?????bandwidth.m ????????? elem_B_plane.m ????????B elem_D_plane.m ??????D elem_MK_plane.m ????????K elem_stressIntp.m ??儈??????? input.m ?????? input_readload.m ???? integrate_gauss_1.m 1?儈??? integrate_gauss_2.m 2?儈??? integrate_hammer.m й??Hammer?? main_AssemSolve.m ???????????Ka = P main_CalStress.m ?????????? output2tec.m ??.dat???Tecplot?? plot_mesh.m ?Matlab????? plot_stress.m ?Matlab??????? shape_cubic_820.m 3?8?20??Serendipity??????shape_lagrange.m 1?Lagrange???? shape_quadrangle_9.m ???9???????? shape_quadrangle_48.m ???4?8??Serendipity??????shape_triangle_36.m й??3?6????????
1.1有限单元法中“离散”的含义是什么?有限单元法是如何将具有无限自由度的连续介质问题转变成有限自由度问题的?位移有限元法的标准化程式是怎样的? (1)离散的含义即将结构离散化,即用假想的线或面将连续体分割成数目有限的单元,并在其上设定有限个节点;用这些单元组成的单元集合体代替原来的连续体,而场函数的节点值将成为问题的基本未知量。 (2)给每个单元选择合适的位移函数或称位移模式来近似地表示单元内位移分布规律,即通过插值以单元节点位移表示单元内任意点的位移。因节点位移个数是有限的,故无限自由度问题被转变成了有限自由度问题。 (3)有限元法的标准化程式:结构或区域离散,单元分析,整体分析,数值求解。 1.3单元刚度矩阵和整体刚度矩阵各有哪些性质?各自的物理意义是什么?两者有何区别? 单元刚度矩阵的性质:对称性、奇异性(单元刚度矩阵的行列式为零)。 整体刚度矩阵的性质:对称性、奇异性、稀疏性。 单元Kij物理意义Kij即单元节点位移向量中第j个自由度发生单位位移而其他位移分量为零时,在第j个自由度方向引起的节点力。 整体刚度矩阵K中每一列元素的物理意义是:要迫使结构的某节点位移自由度发生单位位移,而其他节点位移都保持为零的变形状态,在所有个节点上需要施加的节点荷载。 2.2什么叫应变能?什么叫外力势能?试叙述势能变分原理和最小势能原理,并回答下述问题:势能变分原理代表什么控制方程和边界条件?其中附加了哪些条件? (1)在外力作用下,物体内部将产生应力ζ和应变ε,外力所做的功将以变形能的形式储存起来,这种能量称为应变能。 (2)外力势能就是外力功的负值。 (3)势能变分原理可叙述如下:在所有满足边界条件的协调位移中,那些满足静力平衡条件的位移使物体势能泛函取驻值,即势能的变分为零 δΠp=δUε+δV=0 此即变分方程。对于线性弹性体,势能取最小值,即 δ2ΠP=δ2Uε+δ2V≧0 此时的势能变分原理就是著名的最小势能原理。 势能变分原理代表平衡方程、本构方程和应力边界条件,其中附加了几何方程和位移边界条件。 2.3什么是强形式?什么是弱形式?两者有何区别?建立弱形式的关键步骤是什么? 等效积分形式通过分部积分,称式 ∫ΩC T(v)D(u)dΩ+∫ΓE T(v)F(u)dΓ为微分方程的弱形式,相对而言,定解问题的微分方程称为强形式。 区别:弱形式得不到解析解。 建立弱形式的关键步骤:对场函数要求较低阶的连续性。 2.4为了使计算结果能够收敛于精确解,位移函数需要满足哪些条件?为什么? 只要位移函数满足两个基本要求,即完备性和协调性,计算结果便收敛于精确解。 2.6为什么采用变分法求解通常只能得到近似解?变分法的应用常遇到什么困难?Ritz法收敛的条件是什么? (1)在Ritz 法中,N决定了试探函数的基本形态,待定参数使得场函数具有一定的任意性。如果真实场函数包含在试探函数之内,则变分法得到的解答是精确的;如果试探函数取自完全的函数序列,则当项数不断增加时,近似解将趋近于精确解。然而,通常情况下试探函数不会将真实场函数完全包含在内,实际计算时也不可能取无穷多项。因此,试探函数只能是真实场函数的近似。可见,变分法就是在某个假定的范围内找出最佳解答,近似性就源于此。 (2)采用变分法近似求解,要求在整个求解区域内预先给出满足边界条件的场函数。通常情况下这是不可能的,因而变分法的应用受到了限制。 (3)Ritz 法的收敛条件是要求试探函数具有完备性和连续性,也就是说,如果试探函数满足完备性和连续性的要求,当试探函数的项数趋近于无穷时,则Ritz 法的近似解将趋近于数学微分方程的精确解。 3.1构造单元形函数有哪些基本原则?形函数是定义于单元内坐标的连续函数。单元位移函数通常采用多项式,其中的待定常数应该与单元节点自由度数相等。为满足完备性要求,位移函数中必须包括常函数和一次式,即完全一次多项式。多项式的选取应由低阶到高阶,尽量选择完全多项式以提高单元的精度。若由于项数限制而不能选取完全多项式时,也应使完全多项式具有坐标的对称性,并且一个坐标方向的次数不应超过完全多项式的次数。有时为了使位移函数保持一定阶次的完全多项式,可在单元内部配置节点。然而,这种节点的存在将增加有限元格式和计算上的复杂性,除非不得已才加以采用。形函数应保证用它定义的位移函数满足收敛要求,即满足完备性要求和协调性条件。 3.1构造单元形函数有哪些基本原则?试采用构造单元的几何方法,构造T10 单元的形函数,并对其收敛性进行讨论。 通常单元位移函数采用多项式,其中的待定常数由节点位移参数确定,因此其个数应与单元节点自由度数相等。根据实体结构的几何方程,单元的应变是位移的一次导数。为了反映单元刚体位移和常应变即满足完备性要求,位移函数中必须包含常数项和一次项,即完全一次多项式。 3.3何谓面积坐标?其特点是什么?为什么称其为自然坐标或局部坐标? (1)三角形单元中,任一点P(x,y)与其3个角点相连形成3个子三角形,其位置可以用下述称为面积坐标的三个比值来确定: L1=A1/A L2=A2/A L3=A3/A 其中A1,A2,A3分别为P23,P31,P12的面积。 (2)面积坐标的特点: a T3单元的形函数Ni就是面积坐标Li b面积坐标与三角形在整体坐标系中的位置无关。 c三个节点的面积坐标分别为节点1(1, 0, 0)、节点2(0, 1, 0)、节点3(0, 0, 1),形心的面积坐标为(1/3, 1/3, 1/3)。 d单元边界方程为Li=0(i=1,2,3) e在平行于23边的一条直线上,所有点都有相同的面积坐标L1(L1对应的三角形具有相同的高和底边),而且L1就等于此直线至23边的距离与节点1至23边的距离之比值。
《有限元基础教程》作业二:平面薄板的有限元分析 班级:机自101202班 姓名:韩晓峰 学号:0210 一.问题描述: P P h1mm R1mm 10m m 10mm 条件:上图所示为一个承受拉伸的正方形板,长度和宽度均为10mm ,厚度为h 为1mm ,中心圆的半径R 为1mm 。已知材料属性为弹性模量E=1MPa ,泊松比为,拉伸的均布载荷q =1N/mm 2。根据平板结构的对称性,只需分析其中的二分之一即可,简化模型如上右图所示。 二.求解过程: 1 进入ANSYS 程序 →ANSYS →ANSYS Product Launcher →File management →input job name: ZY2 →Run 2设置计算类型 ANSYS Main Menu: Preferences →select Structural → OK 3选择单元类型 ANSYS Main Menu: Preprocessor →Element Type →Add/Edit/Delete →Add →select Solid Quad 4node 42 →OK → Options… →select K3: Plane Strs w/thk →OK →Close 4定义材料参数 ANSYS Main Menu: Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic →input EX: 1e6, PRXY: → OK 5定义实常数以及确定平面问题的厚度 ANSYS Main Menu: Preprocessor →Real Constants …→Add/Edit/Delete →Add →Type 1→OK →Real Constant Set ,THK:1→OK →Close
有限元分析技术课程大作业 科 目:有限元分析技术 教 师: 姓 名: 学 号: 专 业: 机械设计及理论 类 别: 学 术 上课时间: 2016 年 11 月至 2017 年 1 月 考 生 成 绩: 阅卷评语: 阅卷教师 (签名) 重庆大学研究生院
第一章 问题提出 1.1工程介绍 某露天大型玻璃平面舞台的钢结构如图1所示,每个分格(图2中每个最小的矩形即为一个分格)x 方向尺寸为1m ,y 方向尺寸为1m ;分格的列数(x 向分格)=学生序号的百位数值×10+十位数值+5,分格的行数(y 向分格)=学生序号的个位数值+4,如序号为041的同学分格的列数为9,行数为5,111号同学分格的列数为16,行数为5。 钢结构的主梁(图1中黄色标记单元)为高160宽100厚14的方钢管,其空间摆放形式如图3所示;次梁(图1中紫色标记单元)为直径60厚10的圆钢管(单位为毫米),材料均为碳素结构钢Q235;该结构固定支撑点位于左右两端主梁和最中间(如不是正处于X 方向正中间,偏X 坐标小处布置)的次梁的两端,如图2中标记为UxyzRxyz 处。 玻璃采用四点支撑与钢结构连接(采用四点支撑表明垂直作用于玻璃平面的面载荷将传递作用于玻璃所在钢结构分格四周的节点处,表现为点载荷,如图4所示);试对在垂直于玻璃平面方向的22 /KN m 的面载荷(包括玻璃自重、钢结构自重、活载荷(人员与演出器械载荷)、风载荷等)作用下的舞台进行有限元分析.(每分格面载荷对于每一支撑点的载荷可等效于0.5KN 的点载荷)。 1.2 作业内容 (1)屏幕截图显示该结构的平面布置结构,图形中应反映所使用软件的部分界面,如图1-2; (2)该结构每个支座的支座反力; (3)该结构节点的最大位移及其所在位置; (4)对该结构中最危险单元(杆件)进行强度校核。 图1-1
1.1 有限单元法中“离散”的含义是什么?有限单元法是如何将具有无限自由度的连续介质问题转变成有限自由度问题的?位移有限元法的标准化程式是怎样的? (1)离散的含义即将结构离散化,即用假想的线或面将连续体分割成数目有限的单元,并在其上设定有限个节点;用这些单元组成的单元集合体代替原来的连续体,而场函数的节点值将成为问题的基本未知量。 (2)给每个单元选择合适的位移函数或称位移模式来近似地表示单元内位移分布规律,即通过插值以单元节点位移表示单元内任意点的位移。因节点位移个数是有限的,故无限自由度问题被转变成了有限自由度问题。 (3)有限元法的标准化程式:结构或区域离散,单元分析,整体分析,数值求解。 1.3 单元刚度矩阵和整体刚度矩阵各有哪些性质?各自的物理意义是什么?两者有何区别?单元刚度矩阵的性质:对称性、奇异性(单元刚度矩阵的行列式为零)。整体刚度矩阵的性质:对称性、奇异性、稀疏性。单元 Kij 物理意义 Kij 即单元节点位移向量中第 j 个自由度发生单位位移而其他位移分量为零时,在第 j 个自由度方向引起的节点力。整体刚度矩阵 K 中每一列元素的物理意义是:要迫使结构的某节点位移自由度发生单位位移,而其他节点位移都保持为零的变形状态,在所有个节点上需要施加的节点荷载。 2.2 什么叫应变能?什么叫外力势能?试叙述势能变分原理和最小势能原理,并回答下述问题:势能变分原理代表什么控制方程和边界条件?其中附加了哪些条件? (1)在外力作用下,物体内部将产生应力σ和应变ε,外力所做的功将以变形能的形式储存起来,这种能量称为应变能。 (2)外力势能就是外力功的负值。 (3)势能变分原理可叙述如下:在所有满足边界条件的协调位移中,那些满足静力平衡条件的位移使物体势能泛函取驻值,即势能的变分为零 δ∏p=δ Uε+δV=0 此即变分方程。对于线性弹性体,势能取最小值,即 δ2∏P=δ2Uε+δ2V≥0 此时的势能变分原理就是著名的最小势能原理。 势能变分原理代表平衡方程、本构方程和应力边界条件,其中附加了几何方程和位移边界条件。 2.3 什么是强形式?什么是弱形式?两者有何区别?建立弱形式的关键步骤是什么? 等效积分形式通过分部积分,称式 ∫ΩCT(v)D(u)dΩ+∫ΓET(v)F(u)dΓ 为微分方程的弱形式,相对而言,定解问题的微分方程称为强形式。 区别:弱形式得不到解析解。建立弱形式的关键步骤:对场函数要求较低阶的连续性。2.4 为了使计算结果能够收敛于精确解,位移函数需要满足哪些条件?为什么? 只要位移函数满足两个基本要求,即完备性和协调性,计算结果便收敛于精确解。 2.6 为什么采用变分法求解通常只能得到近似解?变分法的应用常遇到什么困难?Ritz 法收敛的条件是什么? (1)在 Ritz 法中,N 决定了试探函数的基本形态,待定参数使得场函数具有一定的任意性。如果真实场函数包含在试探函数之内,则变分法得到的解答是精确的;如果试探函数取自完全的函数序列,则当项数不断增加时,近似解将趋近于精确解。然而,通常情况下试探函数不会将真实场函数完全包含在内,实际计算时也不可能取无穷多项。因此,试探函数只能是真实场函数的近似。可见,变分法就是在某个假定的范围内找出最佳解答,近似性就源于此。 (2)采用变分法近似求解,要求在整个求解区域内预先给出满足边界条件的场函数。通常情况下这是不可能的,因而变分法的应用受到了限制。 (3)Ritz 法的收敛条件是要求试探函数具有完备性和连续性,也就是说,如果试探函数满足完备性和连续性的要求,当试探函数的项数趋近于无穷时,则 Ritz 法的近似解将趋近于数学微分方程的精确解。 3.1 构造单元形函数有哪些基本原则? 形函数是定义于单元内坐标的连续函数。单元位移函数通常采用多项式,其中的待定常数应该与单元节点自由度数相等。为满足完备性要求,位移函数中必须包括常函数和一次式,即完全一次多项式。多项式的选取应由低阶到高阶,尽量选择完全多项式以提高单元的精度。若由于项数限制而不能选取完全多项式时,也应使完全多项式具有坐标的对称性,并且一
有限元法大作业 一平面刚架的程序 用Visual C++编制的平面刚架的源程序如下: ///////////////////////////////////////////////////////程序开始////////////////////////////////////////////////////////////////// #include"iostream.h" #include"math.h" #include"stdlib.h" #include"conio.h" //***************** //声明必要变量 //***************** #define PI 3.141592654 int NE; //单元数 int NJ; //节点数 int NZ; //支承数 int NPJ; //有节点载荷作用的节点数 int NPF; //非节点载荷数 int HZ; //载荷码 int E; //单元码 int fangchengshu; double F[303]; //各节点等效总载荷数值 int dym_jdm[100][2]; //单元码对应的节点码:dym_jdm[][0], dym_jdm[][1]分为前后节点总码 int zhichengweizhi[300]; //记录支持节点作用点的数组 int fjzhzuoyongdanyuan[100]; //非节点载荷作用单元 int fjzhleixing[100]; //非节点载荷类型:1-均布,2-垂直集中,3-平行集中,4-力偶,5-角度集中 double fjzhzhi[100]; //非节点载荷的值 double fjzhzuoyongdian[100]; //非节点载荷在各竿的作用点 double fjzhjiaodu[100]; //非节点载荷作用角度 int jdzhzuoyongdian[100]; //节点载荷作用的节点数组 double jiedianzaihe[101][3];//节点载荷值,其jiedianzaihe[][0]-- jiedianzaihe[][2]分别为U, V, M double zhengtigangdu[303][303]; //整体刚度数组 double changdu[100]; //各单元竿长数组 double jiaodu[100]; //各单元角度数组 double tanxingmoliang[100]; //各单元弹性模量数组 double J_moliang[100]; //各单元J模量数组 double mianji[100]; //各单元面积数组 double weiyi[303]; //记录各个节点位移的数组 double dy_weiyi[100][6]; //各个单元在局部坐标系中的位移数组dy_weiyi[i][0]-dyweiyi[i][6]分别为第i+1单元的u1,v1,@1,u2,v2,@2 double dy_neili[100][6];//各个单元在局部坐标系中的固端内力dy_weiyi[i][0]-dyweiyi[i][6]分别为第i+1单元的U1,V1,M1,U2,V2,M2 double gan_neili[100][6];//各个单元的竿端内力数组,gan_neili[i][6]表示第i+1单元的6内力. //*******************
《现代设计方法》作业关于有限元法的研究 学院:机械工程学院 专业:机械制造及其自动化
0.有限元法 有限元法分析起源于50年代初杆系结构矩阵的分析。随后,Clough于1960年第一次提出了“有限元法”的概念。其基本思想是利用结构离散化的概念,将连续介质体或复杂结构体划分成许多有限大小的子区域的集合体,每一个子区域称为单元(或元素),单元的集合称为网格,实际的连续介质体(或结构体)可以看成是这些单元在它们的节点上相互连接而组成的等效集合体;通过对每个单元力学特性的分析,再将各个单元的特性矩阵组集成可以建立整体结构的力学方程式,即力学计算模型;按照所选用计算程序的要求,输入所需的数据和信息,运用计算机进行求解。 当前,有限元方法/理论已经发展的相当成熟和完善,而计算机技术的不断革新,又在很大程度上推进了有限元法分析在工程技术领域的应用。然而,如此快速地推广和应用使得人们很容易忽视一个前提,即有限元分析软件提供的计算结果是否可靠、满足使用精度的前提,是合理地使用软件和专业的工程分析。有限元法分析一般包括四个步骤:物理模型的简化、数学模型的程序化、计算模型的数值化和计算结果的分析。每一个步骤在操作过程中都或多或少地引入了误差,这些误差的累积最终可能会对计算结果造成灾难性的影响,进而蒙蔽我们的认识和判断。 1.受内压空心圆筒的轴对称有限元分析 例图1.1所示为一无限长的受内压的轴对称圆筒,该圆筒置于内径为120mm的刚性圆孔中,试求圆筒内径处的位移。结构的材料参数
为:200 =,0.3 E GPa μ=。 图1 结构图 对该问题进行有限元分析的过程如下。 (1)结构的离散化与编号 由于该圆筒为无限长,取出中间一段(20mm高),采用两个三角形轴对称单元,如图1.2所示。对该系统进行离散,单元编号及结点编号如图1.3所示,有关结点和单元的信息见表1.1。 图1.2 有限元模型
有限元分析》大作业基本要求: 1.以小组为单位完成有限元分析计算,并将计算结果上交; 2.以小组为单位撰写计算分析报告; 3.按下列模板格式完成分析报告; 4.计算结果要求提交电子版,一个算例对应一个文件夹,报告要求提交电子版和纸质版。 有限元分析》大作业 小组成 员: 储成峰李凡张晓东朱臻极高彬月 Job name :banshou 完成日 期: 2016-11-22 一、问题描述 (要求:应结合图对问题进行详细描述,同时应清楚阐述所研究问题的受力状况 和约束情况。图应清楚、明晰,且有必要的尺寸数据。)如图所示,为一内六角螺栓扳手,其轴线形状和尺寸如图,横截面为一外 接圆半径为0.01m的正六边形,拧紧力F为600N,计算扳手拧紧时的应力分布 图1 扳手的几何结构 数学模型
要求:针对问题描述给出相应的数学模型,应包含示意图,示意图中应有必要的尺寸数据;
图 2 数学模型 如图二所示,扳手结构简单,直接按其结构进行有限元分析。 三、有限元建模 3.1 单元选择 要求:给出单元类型, 并结合图对单元类型进行必要阐述, 包括节点、自由度、 实常数等。) 图 3 单元类型 如进行了简化等处理,此处还应给出文字说
扳手截面为六边形,采用4 节点182单元,182 单元可用来对固体结构进行
二维建模。182单元可以当作一个平面单元,或者一个轴对称单元。它由4 个结点组成,每个结点有2 个自由度,分别在x,y 方向。 扳手为规则三维实体,选择8 节点185单元,它由8 个节点组成,每个节点有3 个自由度,分别在x,y,z 方向。 3.2 实常数 (要求:给出实常数的具体数值,如无需定义实常数,需明确指出对于本问题选择的单元类型,无需定义实常数。) 因为该单元类型无实常数,所以无需定义实常数 3.3材料模型 (要求:指出选择的材料模型,包括必要的参数数据。) 对于三维结构静力学,应力主要满足广义虎克定律,因此对应ANSYS中的线性,弹性,各项同性,弹性模量EX:2e11 Pa, 泊松比PRXY=0.3 3.4几何建模由于扳手结构比较简单,所以可以直接在ANSYS软件上直接建模,在ANSYS建 立正六 边形,再创立直线,面沿线挤出体,得到扳手几何模型 图4 几何建模
1、何为有限元法?其基本思想是什么? 有限元法是一种基于变分法而发展起来的求解微分方程的数值计算方法,该方法以计算机为手段,采用分片近似,进而逼近整体的研究思想求解物理问题。 基本思想是化整为零集零为整。 2、为什么说有限元法是近似的方法,体现在哪里? 有两点:用离散单元的组合体来逼近原始结构,体现了几何上的近似;而用近似函数逼近未知变量在单元内的真实解,体现了数学上的近似。 3、单元、节点的概念? 节点:表达实际结构几何对象之间相互连接方式的概念 单元:网格划分中的每一个小部分称为单元,网格间相互联结点称为节点 4、有限元法分析过程可归纳为几个步骤? 结构离散化、单元分析、整体分析 5、有限元方法分几种?本课程讲授的是哪一种? 位移法、力法、混合法本课程讲授位移法 6、弹性力学的基本变量是什么?何为几何方程、物理方程及虚功方程?弹性矩阵的特点? 弹性力学变量:外力、应力、应变和位移。 描述弹性体应变分量与位移分量之间的方程称为几何方程;物理方程描述应力分量与应变分量之间的关系;弹性体上外力在虚位移发生过程中所做的虚功与储存在弹性体内的需应变能相等。 弹性矩阵由材料的弹性模量和泊松比确定,与坐标位置无关。 7、何为平面应力问题和平面应变问题? 平面应力问题:在结构上满足a几何条件:研究对象是等厚度薄板。b载荷条件:作用于薄板上的载荷平行于板平面且沿厚度方向均匀分布,而在两板面无外力作用。 平面应变问题:满足a几何条件:长柱体,即长度方向的尺寸远远大于横截面的尺寸,且横截面沿长度方向不变。b载荷条件:作用于长柱体结构上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力两条件的弹性力学问题。 1、何为结构的离散化?离散化的目的?何为有限元模型? ①离散化:把连续的结构看成由有限个单元组成的集合体。②目的:建立有限元计算模型③通常把由节点,单元及相应的节点载荷和节点约束构成的模型称为有限元模型2、结构离散化时,划分单元数目的多少以及疏密分布,将直接影响到什么?确定单元数量的原则?通常如何设置节点?
第三章 平面问题的有限元法作业 1. 图示一个等腰三角形单元及其节点编码情况,设μ=0,单元厚度为t 。求 1)形函数矩阵[]N ;2)应变矩阵[]B ;3)应力矩阵[]S 。 4 第1题图 第2题图 2. 如题图所示,结构为边长等于a 的正方形,已知其节点位移分别为:11(,)u v 、 22(,)u v 、33(,)u v 、44(,)u v 。试求A 、B 、C 三点的位移。其中A 为正方形形心,B 为三角形形心。 3.直角边边长为l 的三角形单元,如题图所示。试计算单元等效节点载荷列阵(单元厚度为t ,不计自重)。 第3题图 第4题图 4. 如题图所示,各单元均为直角边边长等于l 的直角三角形。试计算(1)单元等效节点载荷列阵;(2)整体等效节点载荷列阵。已知单元厚度为t ,不计自重。
5.下列3个有限元模型网格,哪种节点编号更合理?为什么? 9 34 6 7912 11 34 6 12142 (a) (b) (c) 第5题图 6.将图示结构画出有限元模型;标出单元号和节点号;给出位移边界条件;并计算半带宽(结构厚度为t )。 2a (a) (b) 无限长圆筒 (c) 第6题图 7. 结构如图所示,已知结构材料常数E 和 ,单元厚度为t 。利用结构的对称性,采用一个单元,分别计算节点位移和单元应力。 第7题图
答案: 1. 1)形函数 i x N a = , j y N a = , 1m x y N a a =-- 2)应变矩阵 []1000101 000101011011B a -????=-??--???? 3)应力矩阵 []100010100 01 0111 110022 2 2S a ? ???-? ?=-????- -? ?? ? 2. A 点的位移为 ()2312A u u u = + , ()231 2A v v v =+ B 点的位移为 ()24313B u u u u = ++ , ()2431 3B v v v v =++ C 点的位移为 ()1223C a u u u = + , ()C 1223 a v v v =+ 3. 单元等效节点载荷列阵为 {}11 11 00003 663 T e i j i j R q q q q ?? =++?? ?? 4. (2)整体等效节点载荷向量为 {}111100006 322T R qlt P qlt P P qlt qlt ?? =-???? 7. (1) 减缩后的整体刚度方程 22 12 2 1222 22221110222021102(1)2 2102x x b b ab R b ab b P v Et ab a b ab ab R v b a μμμ μμμμμμ---??- - ??????????--?????? -??? ?=????---+ +? ???? ?????????-????+?? ? ? 节点位移
风电主轴承有限元分析 XXX 摘要:基于有限元法在接触问题中的应用,对风电主轴承进行非线性分析。以轴承外圈的内表面和内圈的外表面为目标面,以滚子为接触面创建接触对分析滚子的接触应力情况。最大应力值出现在滚子边缘出,对最大承载滚子环向接触应力分析表明,有限元分析结果与理论计算结果相近,验证了利用有限元法分析风电主轴承应力状态的可行性。 关键词:风电主轴承;接触应力;有限元分析 0 引言 随着传统能源的日益枯竭以及环境污染问题愈发严重,风能作为一种清洁的的可再生能源近些年受到越来越多的关注。风力发电技术已广泛运用于世界各地。一些发达国家风力发电产业已得到了迅猛发展,技术日趋成熟,并开始走向产业化规模化发展阶段[1-3]。 风电主轴承是风力发电机重要的组成部分。其结构形式图下图1所示。据统计,如今安装的所有风力发电机中,采用主轴轴承支撑原理的占总数的75-80%[4],这种支撑是轴承内圈安装在旋转的主轴上,外圈固定在单独的轴承座上,相对于圆锥滚子轴承或圆柱滚子轴承来说,主轴轴承位置处轴产生变形,需要轴承具有一定的调心作用,所以都采用了调心滚子轴承。近年来由于计算机技术的飞速发展,轴承的受力分析计算已经普遍采用有限元分析的方法,能够准确合理地解决轴承复杂的非线性接触问题,为轴承的分析和计算提供了一种新的方法,成为未来的一个发展方向。在机械设备的设计过程中,对受力较大且复杂的零件进行受力分析,校核其整体和局部强度并进行合理的布局设计,是为了防止因应力过大而导致在实际工作中损坏或寿命降低[5]。本文主要运用ANSYS Workbench有限元软件对风电主轴承进行静力学计算,分析轴承内部结构参数对轴承载荷分布和最大接触应力的影响规律。 图1 风电主轴承结构及安装图 1 有限元分析过程 1.1 风电轴承有限元分析基本步骤 不同的物理性质和数学模型的问题,有限元法求解的基本步骤是相同的,只不过 具体公式推导和运算求解不尽相同。有限元分析求解问题的基本计算步骤[6]: 1.问题及求解域定义; 2.求解域离散化; 3.确定状态变量及控制方法; 4.单元推导;
有限元分析及其应用-2010 思考题: 1、有限元法的基本思想是什么?有限元法的基本步骤有那些?其中“离散”的含义是什 么?是如何将无限自由度问题转化为有限自由度问题的? 答:基本思想:几何离散和分片插值。 基本步骤:结构离散、单元分析和整体分析。 离散的含义:用假想的线或面将连续物体分割成由有限个单元组成的集合,且单元之间仅在节点处连接,单元之间的作用仅由节点传递。当单元趋近无限小,节点无限多,则这种离散结构将趋近于实际的连续结构。 2、有限元法与经典的差分法、里兹法有何区别? 区别:差分法:均匀离散求解域,差分代替微分,要求规则边界,几何形状复杂精度较低; 里兹法:根据描述问题的微分方程和相应的定解构造等价的泛函表达式,求得近似解; 有限元:基于变分法,采用分片近似进而逼近总体的求解微分方程的数值计算方法。 3、一根单位长度重量为q的悬挂直杆,上端固定,下端受垂直向下的外力P,试 1)建立其受拉伸的微分方程及边界条件; 2)构造其泛函形式; 3)基于有限元基本思想和泛函求极值构造其有限元的计算格式(即最小势能原理)。4、以简单实例为对象,分别按虚功原理和变分原理导出有限元法的基本格式(单元刚度矩 阵)。 5、什么是节点力和节点载荷?两者有何区别? 答:节点力:单元与单元之间通过节点相互作用 节点载荷:作用于节点上的外载 6、单元刚度矩阵和整体刚度矩阵各有何特点?其中每个矩阵元素的物理意义是什么(按自 由度和节点解释)? 答:单元刚度矩阵:对称性、奇异性、主对角线恒为正 整体刚度矩阵:对称性、奇异性、主对角线恒为正、稀疏性、带状性。 Kij,表示j节点产生单位位移、其他节点位移为零时作用i节点的力,节点力等于节点位移与单元刚度元素乘积之和。 7、单元的形函数具有什么特点?有哪些性质? 答:形函数的特点:Ni为x,y的坐标函数,与位移函数有相同的阶次。 形函数Ni在i节点的值为1,而在其他节点上的值为0; 单元内任一点的形函数之和恒等于1; 形函数的值在0~1间变化。 8、描述弹性体的基本变量是什么?基本方程有哪些组成? 答:基本变量:外力、应力、应变、位移 基本方程:平衡方程、几何方程、物理方程、几何条件 9、何谓应力、应变、位移的概念?应力与强度是什么关系? 答:应力:lim△Q/△A=S △A→0 应变:物体形状的改变 位移:弹性体内质点位置的变化 10、问题的微分方程提法、等效积分提法和泛函变分提法之间有何关系?何谓“强形 式”?何谓“弱形式”,两者有何区别?建立弱形式的关键步骤是什么?
有 限 元 分 析 作 业 作业名称 输气管道有限元建模分析 姓 名 陈腾飞 学 号 3070611062 班 级 07机制(2)班 宁波理工学院
题目描述: 输气管道的有限元建模与分析 计算分析模型如图1所示 承受内压:1.0e8 Pa R1=0.3 R2=0.5 管道材料参数:弹性模量E=200Gpa;泊松比v=0.26。 图1受均匀内压的输气管道计算分析模型(截面图) 题目分析: 由于管道沿长度方向的尺寸远远大于管道的直径,在计算过程中忽略管道的断面效应,认为在其方向上无应变产生。然后根据结构的对称性,只要分析其中1/4即可。此外,需注意分析过程中的单位统一。 操作步骤 1.定义工作文件名和工作标题 1.定义工作文件名。执行Utility Menu-File→Chang Jobname-3070611062,单击OK按钮。 2.定义工作标题。执行Utility Menu-File→Change Tile-chentengfei3070611062,单击OK按钮。 3.更改目录。执行Utility Menu-File→change the working directory –D/chen 2.定义单元类型和材料属性 1.设置计算类型 ANSYS Main Menu: Preferences →select Structural →OK
2.选择单元类型。执行ANSYS Main Menu→Preprocessor →Element Type→Add/Edit/Delete →Add →select Solid Quad 8node 82 →apply Add/Edit/Delete →Add →select Solid Brick 8node 185 →OK Options…→select K3: Plane strain →OK→Close如图2所示,选择OK接受单元类型并关闭对话框。 图2 3.设置材料属性。执行Main Menu→Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic,在EX框中输入2e11,在PRXY框中输入0.26,如图3所示,选择OK并关闭对话框。 图3 3.创建几何模型 1. 选择ANSYS Main Menu: Preprocessor →Modeling →Create →Keypoints →In Active CS →依次输入四个点的坐标:input:1(0.3,0),2(0.5,0),3(0,0.5),4(0,0.3) →OK
有限元作业
有限元分析大作业 学院: 班级: 姓名: 学号: 日期:
试题一(对应第二章) 如图所示,有一受轴向拉伸载荷2000P N =作用的变截面杆件,在0x =处,杆件截面积为2020A mm =,在180x L mm ==处,杆件截面积为201102 A mm =,杆件弹性模量为200GPa ,泊松比为0.3,试建立该杆件的有限元模型,并计算端部位移。(在划分网格时,沿长度方向取三个等长度杆单元) x P 0A 012A L 解:计算分析 000()(1)2(1)2(1)2x x x x A P x A A x A L P x A L P x E EA L σσσε===-=-==-
[ ]00 000022()[ln(2)]ln 2ln(2)12x x x x P dx PL PL u x dx L x L L x x EA EA EA L ε===--=--??- ??? ?? 0() 1.3860.1242mm PL u L EA == 数学建模:将其用二维模型进行降维处理,分为四个节点,三个等长度单元。 后处理
读出最大应力:1.750*10^2mpa 则计算得到右端部位移u(L)=0.12683 轴向位移随杆长变化图如下:
试题二(对应第三章) 一正方形平板,尺寸为40 mm×40 mm,厚度为2 mm,板中央有直径为d的圆孔如下图所示,板材弹性模量为200GPa,泊松比为0.3,在板的左端和右端分别施加20 MPa的拉力载荷.试建立该平板的有限元模型,并分别计算圆孔直 d=5,10,15,20和25mm时,平板开孔应力集中系数。