Data sheet
Energy Recovery Device iSave 21-40
Data sheet Energy Recovery Device / iSave 21-40
1. General information
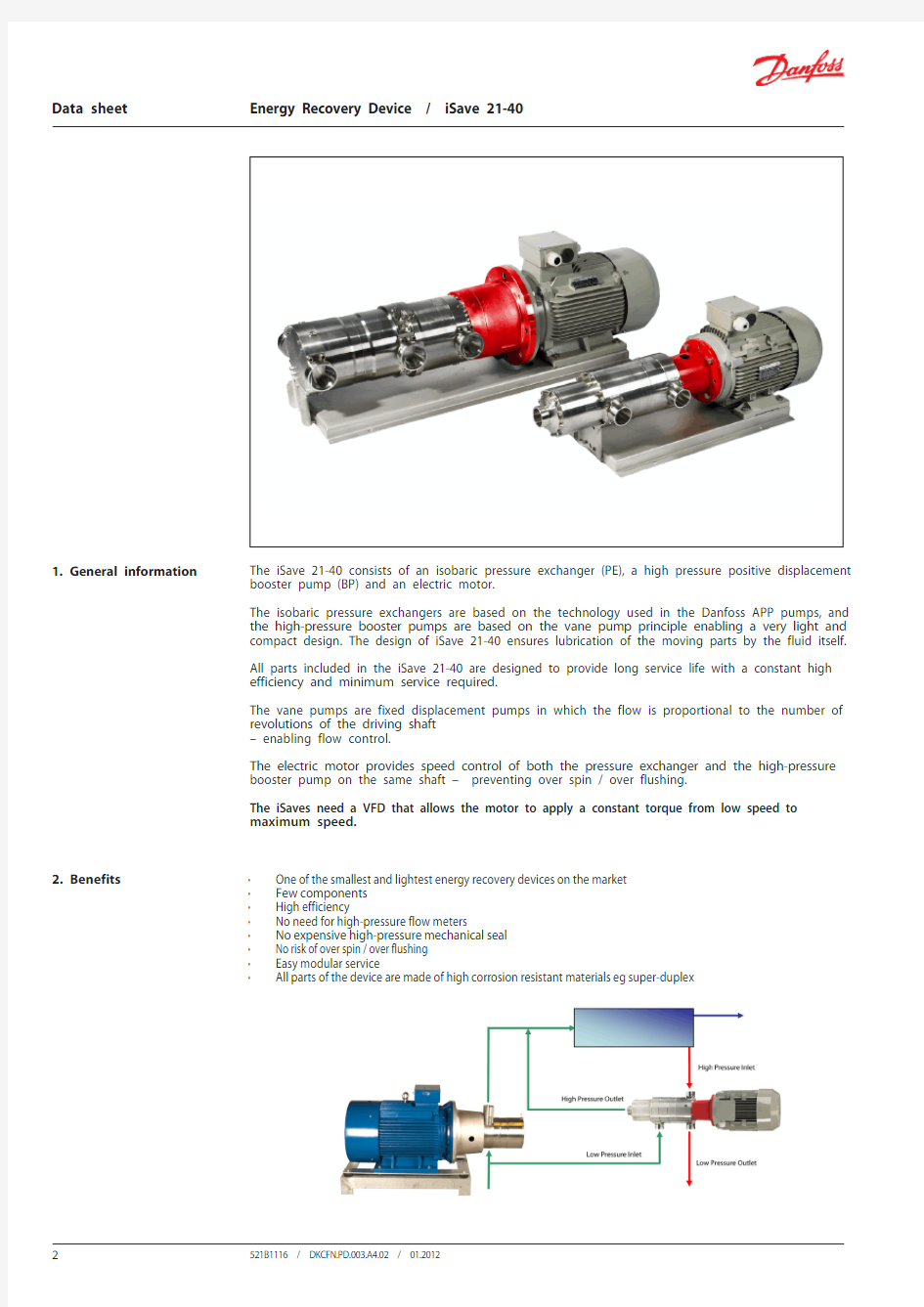
The iSave 21-40 consists of an isobaric pressure exchanger (PE), a high pressure positive displacement booster pump (BP) and an electric motor.
The isobaric pressure exchangers are based on the technology used in the Danfoss APP pumps, and the high-pressure booster pumps are based on the vane pump principle enabling a very light and compact design. The design of iSave 21-40 ensures lubrication of the moving parts by the fluid itself. All parts included in the iSave 21-40 are designed to provide long service life with a constant high efficiency and minimum service required.
The vane pumps are fixed displacement pumps in which the flow is proportional to the number of revolutions of the driving shaft – enabling flow control.
The electric motor provides speed control of both the pressure exchanger and the high-pressure booster pump on the same shaft – preventing over spin / over flushing.
The iSaves need a VFD that allows the motor to apply a constant torque from low speed to
maximum speed.
? One of the smallest and lightest energy recovery devices on the market ? Few components ? High efficiency
? No need for high-pressure flow meters
? No expensive high-pressure mechanical seal ? No risk of over spin / over flushing ? Easy modular service
? All parts of the device are made of high corrosion resistant materials eg super-duplex
2. Benefits
3. Technical data
3.1 Operating conditions 3.2 Performance
iSave 21iSave 40
Code number180F7000 (US 180F7010)
180F7001 (US 180F7011)
180F7003
Energy Recovery Device iSave 21iSave 40
Rated flow 21 m3/hr40 m3/hr Geometric displacement
265.8 cm3/rpm
(16.2 in3/rpm)
526 cm3/rpm
(38.2 in3/rpm)
High-pressure inlet flow, maximum21 m3/hr (92.4 gpm)41 m3/hr (181 gpm)
Low-pressure inlet flow, maximum33 m3/hr (145 gpm)67 m3/hr (295 gpm)
High-pressure inlet pressure, maximum83 bar (1200 psig)83 bar (1200 psig)
High-pressure inlet pressure, minimum10 bar (145 psig)10 bar (145 psig)
High-pressure inlet pressure, intermittent, minimum 3) 3 bar (43.5 psig) 2) 3 bar (43.5 psig)
Low-pressure inlet pressure, maximum 3)10 bar (145 psig)10 bar (145 psig)
Low-pressure outlet pressure, minimum 1 bar (14.5 psig) 1 bar (14.5 psig)
High-pressure outlet pressure, maximum83 bar (1200 psig)83 bar (1200 psig) Filtration requirements (nominal) 4) 3 μm melt-blown 3 μm melt-blown Torque, maximum 5)36 Nm (26.5 lbf-ft)119 Nm (87.8 lbf-ft)
Power requirement at 60 bar,
and booster pressure of 3 bar
5.5 kW (7.5 hp)11 kW (15 hp)
Weight including electric motor95 kg (209,5 lb)254 kg (560 lb)
iSave 21iSave 40
Peak efficiency including high-pressure booster pump
at 60 bar93 %91 %
Maximum pressure raise on iSave 3 bar (43.5 psig)5 bar (72.5 psig) Maximum low-pressure differential (LP In - LP Out)0.9 bar (13 psi) at 21m
3/hr
(92.4 gpm)
1.2 bar (17.5 psi) at 40 m3/hr
(176.1 gpm) Maximum lubrication flow at 60 bar0.42 m3/hr (1.8 gpm)0.8 m3/hr (3.5 gpm) Minimum speed500 rpm600 rpm
Maximum speed1500 rpm1200 rpm
Salinity increase at membrane at 40% recovery rate2-3 %2-3 %
Typical noise level 6)86 dB(A)90 dB(A)
1) Typical average flow at 60 bar
2) Minimum inlet high pressure can be 1 bar, if speed of iSave is maximum 750 rpm
3) Intermittent pressure is acceptable for less than 10 minutes within a period of 6 hours
4) Please see section 7. Filtration
5) Warning: A minimum of 10 seconds is required when ramping up the speed from zero to maximum. Otherwise, the torque will
exceed the maximum limit and may be harmful to the isave.
6) Noise level is depending on system design. The noise level can be obtained by “proper” design.
Please contact Danfoss RO Solutions sales organization
4. Flow at different rpm
The iSave can also be delivered with a marine motor, an ATEX motor or any other special motor.Please contact Danfoss RO Solutions for further information.
The diagram shows that the flow can be changed by changing the rotation speed of the iSave. The flow/rpm ratio is constant, but a required flow is obtainable by changing the rotation speed to a required value. The required rpm can be determined on basis of below equation. - Please find the relevant parameters in above table. Required flow × Rated rpm
Required rpm =
Rated flow
For accurate data please use above formula or use our selection tool which is available on our website: https://www.doczj.com/doc/3a14438866.html,
The iSave is delivered with a 3.1 certificate according to EN10204. “Rated flow” is equal to “output flow” and “rated rpm” is equal to “shaft speed”.
m 3/h r
Rpm
Data sheet
Energy Recovery Device / iSave 21-40
Fluid temperature:
+2°C to +50°C (+35.6°F to 122°F) - dependent on the NaCI concentration Ambient temperature:
+2°C to +50°C (+35.6°F to 122°F)
The chart below illustrates the corrosive resistance of different types of stainless steel related to NaCl concentration and temperature.
All critical parts of the iSave is made of super-duplex 1.4410/UN S32750 or the like.
Always flush the iSave with fresh water at operation stop in order to minimize the risk of crevice corrosion.
Storage temperature:
-40°C to +70°C (-40°F to 158°F) – provided that the pump is drained of fluid and stored ”plugged”.
Frost protection is required at temperatures below 2°C. Danfoss recommends to use DOWFROST
from DOW Chemical Company or Chillsafe mono propylene glycol from Arco Chemical Company.
The noise levels for the iSaves are measured at rated speed, 60 bar, and a booster pressure of 3 bar.Since the iSave is mounted on a bell housing and electric motor, the noise level can only be determined for the complete unit (system).
It is therefore important that the iSave unit is mounted correctly on a frame with dampers to minimize vibrations and noise. It is also strongly recommended to use high-pressure flexible hoses between the hard piping in the RO-plant and the iSave or to use multiple connections with Victaulic clamps.The noise level is influenced by:
? Pressure. Higher pressure causes higher noise level.
? The speed of the iSave. High speed creates more noise than low rpm.
? Rigid mounting of the iSave generates more noise than flexible mounting.
? Pipe mounting direct to the iSave increases the noise level compared to flexible hoses.
It is important that the incoming water is filtered properly to ensure optimum service life. A true graded density melt-blown depth filter cartridge rated at 3 μm is therefore recommended.
As the various filters on the market differ greatly, Danfoss RO Solutions recommends using cartridges with consistent, reliable performance and high efficiency and where fibres are blown continuously onto a central support core. Danfoss RO Solutions does not recommend cartridges requiring any type of binders or resins.
Filters can be purchased from Danfoss RO Solutions. Please see section 10.0, “RO systems with an iSave”, for installation of filter. For more information on the importance of proper filtration, please consult our publication “Filtration” (code number 521B1009), which also will provide you with an explanation of filtration definitions and a guidance on how to select the right filter.
5. Temperature and corrosion 5.1 Operation
6. Noise level
7. Filtration
Data sheet
Energy Recovery Device / iSave 21-40
8.1 iSave 2165 kg
Data sheet Energy Recovery Device / iSave 21-40
8.3 Complete iSave 21 / 40
with electric motor
iSave 21
95 kg
iSave 40
- horizontal (codeno. 180F7001)
254 kg
Data sheet Energy Recovery Device / iSave 21-40
9. Installation
Mounting
The figure below illustrates how to mount the iSave and connect it to the electric motor.
If alternative mounting is required, please contact Danfoss RO Solutions sales organization for further information. To ensure easy mounting of the flexible coupling without using tools, the tolerances must be dimensioned accordingly.
Note: Any axial and radial load on the shaft must be avoided.
A B
C
A: Flexible coupling B: Bell housing
C: Motor shaft
iSave 40
- vertical (codeno. 180F7003)254 kg
Data sheet Energy Recovery Device / iSave 21-40
Orientation
The iSave can be mounted horizontally and vertically.
When mounted vertically, the electric motor must be placed at the top and the isave.
The iSave is connected to the electric motor by the bell housing. The bell housing is not suitable
to carry the weight of either the iSave or the motor. Both the iSave and motor must be supported
without applying stress/overload to the bell housing.
Danfoss supplies the iSave together with a baseplate and support brackets. Although the
baseplate is of heavy design, it can flex or bend when it is bolted to the foundation. Therefore the
baseplate requires a solid foundation such as concrete or rigid steel frame. The baseplate itself
must be aligned to avoid bending caused by bolting to an uneven foundation.
A rigid foundation for the iSave assembly is important and the iSave assembly must be bolted
to the foundation. The bolts used, must be of proper design and must be installed in accordance
with the bolt manufacturer’s recommendations.
1: Motor
2: Flexible Coupling 3: Bell Housing 4: Base Plate 5: Pressure Exchanger 6: Booster Pump
7: Port Connection
Data sheet
Energy Recovery Device / iSave 21-40
11. Service
11.1 Periodic maintenance 11.2 Repair
Explanation of PID setup A. Place inlet filters on LP string in front of the iSave (11). Please consult section 7, “Filtration” for guidance on how to select the right filter. Thoroughly clean pipes and flush system prior to start-up.B. P lace a monitoring pressure switch (3) set at minimum inlet pressure between filter and pump inlet. The monitoring switch must stop the iSave (11) and the high-pressure pump (4) at pressures lower than minimum inlet pressure.C. D imension the piping to obtain minimum pressure loss (large flow, minimum pipe length, mini-mum number of bends/connections and fittings to prevent pressure loss and flow turbulence). Use flexible hoses to minimize vibrations and noise.
D.
T o balance the flow between high-pressure in and low-pressure in, place a variable area flow meter (12) on low- pressure inlet to the iSave.
E.
I n order to eliminate the risk of damage and cavitation, a positive pressure at the low-pres sure outlet from the iSave is always to be maintained at minimum 1 bar (14.5 psig) and maximum 10 bar (145 psig). It is recommended to install monitoring pressure switch (13) in order to prevent high/low pressure.
F. Install a VFD to control the speed of the iSave.
G. Install a pressure control valve (15) to control pressure in low-pressure out.
H. Install an air bleed valve (8) on the highest point of the high-pressure piping to make sure air escapes the system in the bleeding process.
I. The pressure relief valve (6) protects the whole system against pressure overload and relief the water if the pressure exceeds the maximum set pressure.
I f the high pressure pump is a positive displacement pump, the pump can built up a very high pressure that will exceed mechanical strenght of the membrane housing, pipes and other acces-sories.
J. The pressure relief valve (19) protects the low pressure pipes against pressure overload and
relief the water if the pressure exceeds the maximum allowable pressure.
For alternative PID setup, please contact Danfoss RO-Solutions sales organisation.
Provided that the iSave has been running according to Danfoss specifications for pre-filtration, pressure and rotation speed, Danfoss RO Solutions guarantees 8,000 hours service-free operation, however maximum 18 months from date of production.
After 8,000 hours of operation, Danfoss recommends an inspection where worn parts, if any, must be replaced.
If Danfoss RO Solutions recommendations concerning system-design are not followed, it can influence the life of the iSave.
The iSave is made of super duplex materials with fine corrosion properties. However, it is always required to flush the iSave when the system is shut down. See start/stop instruction 521B1133.
Declining performance will require inspection of the iSave.
In case of irregular function of the iSave, please contact the Danfoss RO Solutions sales organisation.
10. RO systems with an iSave
PID setup
Data sheet
Energy Recovery Device / iSave 21-40
6,008,0010,0012,00
14,0016,0018,0020,0022,00
m3/hr
m 3/h r
0,5 gpm
1,0 gpm
1,5 gpm
12.1 Performance curves iSave 21
Differential pressure, Low Pressure
r
0,00
0,200,400,600,80
1,001,204,06
,0
8,01
0,01
2,01
4,016,018,020,022,0
m3/h r
B a r 5 psi
10 psi
15 psi
m 3/h r
m3/hr
Lubrication ow
1.5 gpm
3 gpm
研究生课程考核试卷 (适用于课程论文、提交报告) 科目:汽车技术现状及发展趋势教师:贺岩松姓名:赵金龙学号:20110702218 专业:车辆工程类别:学术 上课时间:2011年11月至2011年11月 考生成绩: 阅卷评语: 阅卷教师(签名) 重庆大学研究生院制
再生制动技术现状及发展趋势 摘要 随着新能源危机的加剧,混合动力汽车和纯电动汽车已经成为新一代汽车的发展方向,而再生制动技术作为混合动力汽车和电动汽车的一向重要节能技术,已经得到越来越大的重视。再生制动技术使汽车在制动过程中将一部分动能转化为电能并储存在储能装置中,实现了制动减速时的能量再利用。本文对再生制动的工作原理、技术发展现状进行了详细的阐述,并提出日后的发展趋势。 关键词:制动能量;制动能量回收;发展现状 Regenerative Braking Technology Status and Development Trends ABSTRACT With the new energy crisis intensifies, hybrid vehicles and pure electric vehicles has become the new direction of next generation car, and regenerative brakingtechnology as an important energy-saving technology for hybrid vehicles and electric cars has been paid more and more attention.During braking, part of the kinetic energywill be turn into electrical energy by regenerative braking technology so that we can achieve the energy re-use when the car speed is brakingdeceleration .In this paper, regenerative braking technology works and research status has been elaborated in detail and proposed the future development trend. Key words:Braking energy; Energy regeneration and use; Research status
纯电动汽车制动能量回 收技术 Document number:PBGCG-0857-BTDO-0089-PTT1998
纯电动汽车制动能量回收技术 电动汽车制动能量回收技术是利用汽车在踩动刹车进行减速时将制动效能转变为电能储存并回收到电池当中,摩擦能量没有被浪费掉而是变相扩充了电池的容量,增加了纯电动汽车的续航里程,并且减少了刹车系统耗材的磨损。 电动汽车在“新能源”话题备受瞩目的今日已经不是个陌生词语,但是电动汽车的历史比大多数人想像得要长很多。1896年还推出了为电动车换电的服务,也就是我们今天所说的“充电桩”的雏形[仇建华,张珍,电动汽车制动能量回收方式设计[J].上海汽车.2012,12.];在十九世纪末二十世纪初的交通大变革中,电动汽车作为一种新型事物快速成长但又迅速陨落。有社会环境的影响也有自身条件的限制。 目前常见的纯电动汽车,其动力电池组、电池变换器和电动机之间为电气连接,电动机、减速器和车轮之间为机械连接。 纯电动汽车制动能量回收技术研究背景 ?动车从登上历史的舞台开始,续航性能如何提升一直是人们争议很大的点。从根本上来说,续航能力可以通过
改进蓄能和驱动方式来提高,除此之外,制动能量回收也是重要的方式之一。 制动能量回收,简单来说,就是把电动汽车的电机组中无用的部分、不需要的部分,甚至有害的惯性转动带来的动能转化为电能,并返回给蓄电池,与此同时产生制动力矩,使电动机快速停止惯性转动,这整个过程也就成为再生制动过程[叶永贞,纯电动汽车制动能量回收系统研究[D].山东:青岛理工大学,2013.]。 电动汽车发展至今,已有大部分安装了类似装置以节约制动能,经过研究发现,在行驶路况频繁变化的路段,制动能量回收技术可以增加20%左右的续驶里程。 制动能量回收方法 制动能量回收方法有常见三种: 飞轮蓄能。特点:①结构简单;②无法大量蓄能。 液压蓄能。特点:①简便、可大量蓄能;②可靠性高。 蓄电池储能。特点:①无法大量蓄能②成本太高。 电动汽车制动能量回收系统的结构 无独立发电机的制动能量回收系统。①前轮驱动制动能量回收系统;②全轮驱动能量回收制动系统。有独立发电机的制动能量回收系统。 系统传动方式
纯电动汽车制动能量回收技术 电动汽车制动能量回收技术是利用汽车在踩动刹车进行减速时将制动效能转变为电能储存并回收到电池当中,摩擦能量没有被浪费掉而是变相扩充了电池的容量,增加了纯电动汽车的续航里程,并且减少了刹车系统耗材的磨损。 电动汽车在“新能源”话题备受瞩目的今日已经不是个陌生词语,但是电动汽车的历史比大多数人想像得要长很多。1896年还推出了为电动车换电的服务,也就是我们今天所说的“充电桩”的雏形[仇建华,张珍,电动汽车制动能量回收方式设计[J].上海汽 车.2012,12.];在十九世纪末二十世纪初的交通大变革中,电动汽车作为一种新型事物快速成长但又迅速陨落。有社会环境的影响也有自身条件的限制。 目前常见的纯电动汽车,其动力电池组、电池变换器和电动机之间为电气连接,电动机、减速器和车轮之间为机械连接。 纯电动汽车制动能量回收技术研究背景 ?动车从登上历史的舞台开始,续航性能如何提升一直是人们争议很大的点。从根本上来说,续航能力可以通过改进蓄能和驱动方式来提高,除此之外,制动能量回收也是重要的方式之一。 制动能量回收,简单来说,就是把电动汽车的电机组中无用的部分、不需要的部分,甚至有害的惯性转动带来的动能转化为电能,并返回给蓄电池,与此同时产生制动力矩,使电动机快速停止惯性转动,这整个过程也就成为再生制动过程[叶永贞,纯电动汽车
制动能量回收系统研究[D].山东:青岛理工大学,2013.]。 电动汽车发展至今,已有大部分安装了类似装置以节约制动能,经过研究发现,在行驶路况频繁变化的路段,制动能量回收技术可以增加20%左右的续驶里程。 制动能量回收方法 制动能量回收方法有常见三种: 飞轮蓄能。特点:①结构简单;②无法大量蓄能。 液压蓄能。特点:①简便、可大量蓄能;②可靠性高。 蓄电池储能。特点:①无法大量蓄能②成本太高。 电动汽车制动能量回收系统的结构 无独立发电机的制动能量回收系统。①前轮驱动制动能量回收系统;②全轮驱动能量回收制动系统。有独立发电机的制动能量回收系统。 系统传动方式 液压混合动力系统的系统传动方式有四种:串联式;并联式;混联式;轮边式。 串联式混合动力驱动系统。串联式混合动力驱动系统,动力源有:发动机和高压蓄能器。 这种方式只适合整车质量小、车速不能过高的小型公交车等。 并联式混合动力驱动系统。并联式混合动力驱动系统动力源是发动机和高压蓄能器。但并联式车辆在制动能量再生系统不工作或出故障时可以由发动机单独直接驱动车辆。 并联式系统的驱动路线有两条,一条是由发动机传给变速器,
纯电动汽车制动能量回收系统技术方案研究 1、研究制动能量回收的背景和意义在电动汽车研究中,如何研制高性能储能设备、如何提高能量利用率,是所有研究中比较重要的两个方面。尽管蓄电池技术发展迅速,但受经济性、安全性等因素制约,难以在短时间内实现重大突破。因此如何提高电动汽车的能量利用率是一个非常关键的问题。研究制动能量再生对提高电动汽车的能量利用率非常有意义。汽车在制动过程中,汽车的动能通过摩擦转化为热量消耗掉,大量的能量被浪费掉。据有关数据研究表明,在几种典型城市工况下,汽车制动时由摩擦制动消耗的能量占汽车总驱动能量的50%左右。这对于改善汽车的能量利用效率、延长电动汽车的行驶里程具有重大意义。国外有关研究表明,在较频繁制动与起动的城市工况运行条件下,有效地回收制动能量,电动汽车大约可降低15%的能量消耗,可使电动汽车的行驶距离延长10%~30%。因此,对电动汽车制动能量进行回收,意义如下:在当前电动汽车电池储能技术没有重大突破的条件下,回收电动汽车制动能量可以提高电动汽车的能量利用率,增加电动汽车的行驶距离;机械摩擦制动与电制动结合,可以减少机械摩擦制动器的磨损,延长制动器使用寿命,节约生产成本;分担传统制动器部分制动强度,减少汽车在繁重工作条件下(例如长下坡)制动时产生的热量,降低了制动器温度,提高
了制动系统抗热衰退的能力,提高了汽车的安全性和可靠性。电动汽车再生制动的基本原理是:通过具有可逆作用的电动机/发电机来实现电动汽车动能和电能的转化。在汽车减速或制动时,可逆电机以发电机形式工作,汽车行驶的动能带动发电机将汽车动能转化为的电能并储存在储能器(蓄电池或超级电容)中;汽车起步或加速时,可逆电机以电动机形式工作, 将储存在储能器中的电能转化为机械能给汽车。2、国内外制动能量再生领域研究状况美国Texas A&M大学:Yimin Gao 提出了评价制动能量回收效率的三种制动力分配控制策略,在此基础上建立了纯电动汽车的制动能量仿真实验模型,针对不同的制动强度进行了仿真实验。YImin Gao和Mehrdad Ehsani提出了一种基于制动能量回收系统的纯电动汽车和混合动力汽车ABS系统的控制策略,通过精确设计电机制动力门限值,使得再生制动系统与ABS系统可兼容工作。Wicks 等建立了城市客车在市区行驶循环工况下的数学模型,研究再生制动系统的节能效果。Hongwei Gao等提出了混合动力汽车基于开关磁阻电机再生制动的神经网络控制系统,并在行驶循环工况下进行了能量回收效率的分析。Panagiotidis等建立了并联式混合动力汽车的再生制动模型,对再生制动的效果进行仿真计算和影响因素的分析比较。Hoon Yeo采用Ⅰ曲线作为前后制动力分配策略,但是该分配策略加大了后轮制动器制动力,减小了电机制动力,从而降低了能量回收率,增
摘要:电动汽车的驱动电机运行在再生发电状态时,既可以提供制动力,又可以给电池充电回收车体动能,从而延长电动车续驶里程。对制动模式进行了分类,并详细探讨了中轻度刹车时制动能量回收的机制和影响因素。提出了制动能量回收的最优控制策略,给出了仿真模型及结果,最后基于仿真模型及XL型纯电动车对控制算法的效果进行了评价。关键词:制动能量回收电动汽车镍氢电池Simulink模型电动汽车(EV)的研究是在环境保护问题及能源问题日益受到关注的情况下兴起的。在EV性能提高并逐步迈向产业化的过程中,提高能量的储备与利用率是迫切需要解决的两个问题。尽管蓄电池技术有了长足进步,但由于受安全性、经济性等因素的制约,近期不会有大的突破。因此如何提高EV能量利用率是一个非常关键的问题。制动能量回收问题对于提高EV的能量利用率具有重要意义。电动汽车采用电制动时,驱动电机运行在发电状态,将汽车的部分动能回馈给蓄电池以对其充电,对延长电动汽车的行驶距离是至关重要的。国外有关研究表明,在存在较频繁的制动与起动的城市工况运行条件下,有效地回收制动能量,可使电动汽车的行驶距离延长百分之十到百分之三十。目前国内关于制动能量回收的研究还处在初级阶段。制动能量回收要综合考虑汽车动力学特性、电机发电特性、电池安全保证与充电特性等多方面的问题。研制一种既具有实际效用、又符合司机操作习惯的系统是有一定难度的。本文对上述问题作了一些积极的探索,并得出了一些有益的结论。1制动模式电动汽车制动可分为以下三种模式,对不同情况应采用不同的控制策略。1.1急刹车急刹车对应于制动加速度大于2m/s2的过程。出于安全性方面的考虑,急刹车应以机械为主,电刹车同时作用。在急刹车时,可根据初始速度的不同,由车上ABS控制提供相应的机械制动力。1.2中轻度刹车中轻度刹车对应于汽车在正常工况下的制动过程,可分为减速过程与停止过程。电刹车负责减速过程,停止过程由机械刹车完成。两种刹车的切换点由电机发电特性确定。1.3汽车长下坡时的刹车汽车长下坡一般发生在盘山公路下缓坡时。在制动力要求不大时,可完全由电刹车提供。其充电特点表现为回馈电流较小但充电时间较长。限制因素主要为电池的最大可充电时间。由于电动汽车主要工作在城市工况下,所以本文将研究重点放在中轻度电刹车上。2制动能量回收的约束条件实用的能量回收系统应满足以下要求:(1)满足刹车的安全要求,符合驾驶员的刹车习惯。刹车过程中,对安全的要求是第一位的。需要找到电刹车和机械刹车的最佳覆盖区间,在确保安全的前提下,尽可能多地回收能量。具有能量回收系统的电动汽车的刹车过程应尽可能地与传统的刹车过程近似,这将保证在实际应用中,系统有吸引力,可以为大众所接受。(2)考虑驱动电机的发电工作特性和输出能力。电动汽车中常用的是永磁直流电机或感应异步电机,应针对不同的电机的发电效率特性,采取相应的控制手段。(3)确保电池组在充电过程中的安全,防止过充。电动汽车中常用的电池为镍氢电池、锂电池和铅酸电池。充电时,避免因充电电流过大或充电时间过长而损害电池。由以上分析可得能量回收的约束条件:(1)根据电池放电深度的不同,电池可接受的最大充电电流。(2)电池可接受的最大充电时间。(3)能量回收停止时电机的转速及与此相对应的充电电流值。本项目原型车为XL型纯电动车,驱动采用异步交流电机,额定功率为20kW,峰值功率为60kW,额定转矩为53Nm,峰值转矩为290Nm,持续输出三倍额定转矩时间不小于30s,额定转速为3600r/min,最高转速为9000r/min。蓄电池采用24节100Ah镍氢电池,其瞬时充电电流可达1.5C(C为电池放电倍率),即150A。在充电电流为0.5C时,可持续安全充电。实验表明,在电机转速为500r/min时,充电电流小于6A。可设此点为电刹车与机械刹车的切换点。3制动能量回收控制算法3.1制动过程分析经推导可得,一次刹车回收能量E=K1K2K3(ΔW-FfS)。特定刹车过程中,车体动能衰减ΔW为定值。特定车型的机械传动效率K1和滚动摩擦力Ff基本上是固定的。对蓄电池来说,制动能量回收对应于短时间(不超过20s)、大电流(可达100A)充电,因此能量回收约束条件(2)可忽略,充电效率K3也可认为恒定。对于电机来说,在制动过程
低碳世博,能源再利用—— 基于超级电容的城市轨道车辆制动能量回收 1 概述 由于城市轨道车辆具有运量大、速度快、安全、准点、保护环境、节约能源和用地等特点,世界各国普遍认识到,解决城市交通问题的根本出路在于优先发展以轨道交通为骨干的城市公共交通系统。随着我国经济的高速发展、城市化进程的不断加快,城市轨道交通将在我国城市公共交通运输中占有越来越越重要的地位。到目前为止我国已有北京、上海、广州、深圳、武汉等城市已经运行,截至2009年9月,我国有27个城市正在筹备建设城市轨道交通,其中22个城市的轨道交通建设规划已经获得国务院批复。至2015年,北京、上海、广州、深圳等22个城市将建设79条轨道交通线路,总长度为2259.84公里,计划总投资8820.03亿元。 城市轨道交通列车的特点就是线路的站间距短,列车运行时频繁地起动、制动,基本上在列车达到最高速时很快就会制动。目前,我国地铁列车大都采用接触网/轨直流供电, 牵引系统大都是变压变频的交流传动系统。列车牵引时从电网吸收能量,制动时采用反馈制动把制动能量反馈回电网, 根据经验,地铁再生制动产生的能量除了一定比例(一般为20%~80%,根据列车运行密度和区间距离的不同而异)被其他相邻列车吸收利用外,剩余部分将主要被列车的吸收电阻以发热的方式消耗掉或被线路上的吸收装置吸收。当列车发车密度较低时,再生能量被其他车辆吸收的概率将大大降低。资料表明,当列车发车间隔大于10 min 时,再生制动能量被吸收的概率几乎为零,此时绝大部分制动能量将被车辆吸收电阻吸收,变成热能并向四外散发,这必将使隧道和站内的温度升高。目前国内城市轨道交通在地面采用电阻能耗吸收装置处理列车运行过程中的再生能量,这不仅浪费能量,而且也增加了站内空调通风装置的负担,并使城轨建设费用和运行费用增加。如能将这部分能量储存再利用,这些问题将迎刃而解。 2 可行性分析 城市轨道交通车辆制动能量是否具有回收的可行性,需要对制动能量进行合理计算,并根据其大小确定制动能量是否具有实际回收价值。现以一列上海轨道交通2号线6节车辆编组为例(4节动车,2节拖车),设轨道车辆的制动初速度为70km/h (V1) ,制动末速度为8km/h (V2),M为车辆和载客质量,则利用公式(1)计算电制动能量。(1)
列车再生制动能量回收的方法及分析 城市轨道交通是耗电大户。而如何高效利用电能是目前城市轨道交通节能技术的关键问题。车辆在运行过程中,由于站间距一般较短,因此要求起动加速度和制动减速度比较大,并具有良好的起动和制动性能。城轨交通供电系统一直采用二极管整流技术实现交流电源到直流牵引电源的转换,特别是采取24脉波整流技术后,与电网的谐波兼容问题得到较好地解决。该技术虽然可以较好地满足车辆牵引取流的需求,但是此类系统存在以下问题: (1)只能实现能量的单向流动,对于需要频繁起动和制动的地铁、轻轨等交通工具,制动能量的回收有着很大的潜力。车辆再生制动产生的反馈能量一般为牵引能量的30%甚至更多。而这些再生能量除了按一定比例(一般为20%~80%,根据列车运行密度和区间距离的不同而异)被其它相邻列车吸收利用外,剩余部分将主要被车辆的吸收电阻以发热的方式消耗掉或被线路上的吸收装置吸收。如果在一列地铁列车刹车时附近没有其他列车加速运行,那它所回馈的电能中只有30%~50%能被再次利用(尤其是在低电压、高电流的网络系统里)。如果当列车发车的间隔大于10 min时,再生制动能量被相邻列车吸收重新利用的概率几乎为零。 (2)由于制动电阻的发热引发站台和地下隧道热量积累、温度上升,某些城轨系统隧道温度高达50℃,不得不加大通风设备的容量,造成严重的二次能耗; (3)对于车载制动电阻模式制动电阻增加车体自重造成的电能消耗十分可观; (4)牵引网上同时在线运行的车辆有十几对甚至几十对,负荷的变化造成牵引网压波动严重,不利于车辆平稳、可靠运行。可见车辆的制动能量至今还是一种没有被很好地开发利用的能量。 目前,在我国大力提倡节能降耗的形势下,城轨供电系统的发展进度已滞后列车车辆技术的发展,多个待建的城市轨道线路,如无锡、苏州、长沙、西安、深圳和广州等多条线路,都提出了对现有牵引供电系统进行技术改造的需求或者是寻求更好的储能装置去回收这些多余的再生能量。再生制动能量循环利用主要有储能和逆变两种方式:储能所采用的技术主要有蓄电池储能、电容储能、飞轮储能3种;而能量回馈所采用的技术主要是逆变至中压网络和低压网络两类。 首先介绍储能型回收装置 (1)蓄电池储能 蓄电池储能系统如图所示,该装置是将制动能量吸收到电池介质中,当供电区间有列车需要取流时,再将所储存的能量释放出去,由于蓄电池本身的特点充放电电流小,瞬间不能大功率充放电,所以该装置体积较大电池处于频繁充放电状态将影响其使用寿命,储能容量相对较少。
第一篇章:制动能量回收系统简介 制动能量回收系统定义 制动能量回收系统是指一种应用在汽车或者轨道交通上的系统,能够将制动时产生的热能转换成机器能、并将其存储在电容器内,在使用时可迅速将能量释放,又名MINI Clubman。MINI Clubman从一开始就凭借独特的概念,外向的设计以及别具魅力的发动机脱颖而出,为新一代MINI开发的三款高技术发动机确保了无时不在的运动驾驶乐趣和非凡的高效。而且MINI Clubman的所有发动机当然也标准装备了2008年车型为最大降低燃油消耗量而推出的全部新技术。 制动能量回收系统的优点 这些智能技术提高了发动机的效率,适度降低了耗油量,同时也进一步提高了驾驶乐趣。这里一个很好的例子就是制动能量回收系统,能源管理系统确保发动机的输出功率主要被转化成为驱动力,只有在应用制动时或发动机处于超速状态时才会转化成电能供车载系统使用。为了达到这个效果,发电机会在发动机输出功率,即加速或牵引汽车时自动与发动机脱离。因此,传统模式下发电机消耗和从汽车那里获得的动力现在全部用以实现更快更具动态的加速。因为在MINI回到超速状态或驾驶者应用制动时,发电机就会再次启动,从而确保车载系统能够得到充足的电力供应。 制动能量回收问题解决方案 可以通过在发动机与电机之间设置在车辆减速时,使发动机停止输出功率而得以解决。但制动能量回收还涉及到混合动力车的液压制动与制动能量回收的复杂平衡或条件优化的协调控制。那么,为什么可以通过驱动电机能够回收车辆的运动能量呢?概要地说,其原因就是电机工作的逆过程就是发电机工作状态。一般电学基础理论早已阐明,表示电机驱动的工作原理是Fleming(英籍工程师佛莱明)的左手定则,而表示发电原理的则
制动能量回收系统 目录 概述 制动能量回收系统又名Braking Energy Recovery System:是指一种应用在汽车或者轨道交通上的系统,能够将制动时产生的热能转换成机器能、并将其存储在电容器内,在使用时可迅速将能量释放, 制动能量回收原理 制动能量回收是现代电动汽车与混合动力车重要技术之一,也是它们的重要特点。在一般内燃机汽车上,当车辆减速、制动时,车辆的运动能量通过制动系统而转变为热能,并向大气中释放。而在电动汽车与混合动力车上,这种被浪费掉的运动能量已可通过制动能量回收技术转变为电能并储存于蓄电池中,并进一步转化为驱动能量。例如,当车辆起步或加速时,需要增大驱动力时,电机驱动力成为发动机的辅助动力,使电能获得有效应用。 一般认为,在车辆非紧急制动的普通制动场合,约1/5的能量可以通过制动回收。制动能量回收按照混合动力的工作方式不同而有所不同。 比如在丰田普锐斯混合动力车上,车辆运动能量能够通过液压制动和能量回收制动的协调控制回收。但在本田Insight混合动力车上,由于发动机与驱动电机连接,所以不能够消除发动机制动。因此,在制动时发动机全部气门关闭,以消除泵气损失,而只存在发动机本身的纯粹的机械摩擦损失。 在发动机气门不停止工作场合,减速时能够回收的能量约是车辆运动能量的1/3。通过智能气门正时与升程控制系统使气门停止工作,发动机本身的机械摩擦(含泵气损失)能够减少约70%。回收能量增加到车辆运动能量的2/3。 制动能量回收液压制动协调控制的概况 制动能量回收问题解决方案 可以通过在发动机与电机之间设置离合器,在车辆减速时,使发动机停止输出功率而得以解决。但制动能量回收还涉及到混合动力车的液压制动与制动能量回收的复杂平衡或条件优化的协调控制。那么,为什么可以通过驱动电机能够回收车辆的运动能量呢?概要地说,其原因就是电机工作的逆过程就是发电机
电控制动是趋势谈电动车制动解决方案 [汽车之家技术] 围绕电动车的话题更多的集中在续航里程、电池类型、充电方式及时间等一些使用的问题上,今天我们来聊聊别的话题,电动技术在代替了传统动力技术后,引发的变革确实是巨大的,这也影响到了车辆的技术开发,制动系统就是要谋变的其中一环。 图中所示为传统制动系统,驾驶员控制踏板,与踏板相连的是真空助力器,它负责将驾驶员施予踏板的力放大并推动主泵活塞进行制动压力,最后,制动分泵由活塞推动制动片夹紧制动盘,从而实现制动力。 这里面涉及到一个很重要的部件——真空助力器,如果它的工作状态不好,驾驶员踩制动踏板时就会觉得很硬,没有经验的驾驶员就会误以为没有制动功能了。而真空助力器的真空环境是由发动机提供的,较为传统的方式是从进气歧管处引出一根气管通向真空助力器,为了确保真空环境的稳定性,有些发动机还专门为
真空助力器设计了一个由凸轮轴驱动的机械真空泵,在此之前,还有厂商用电子真空泵来弥补“真空”。 传统动力汽车,制动系统可以从发动机处获得真空源从而让真空助力器为驾驶员提供辅助作用,那电动车的动力系统不具备制造真空的能力,制动助力的问题将如何解决? 解决这个问题现在有两种模式,一种是在现有的结构基础上去解决真空 源的问题,另一种则是采用新的技术原理,彻底舍弃真空在制动系统中的用途,重新设计制动系统技术结构。不仅是汽车行业,在各行各业面临新老更替时都少不了这样的做事逻辑。 ● 利用现有基础进行技术改进 利用现有结构基础进行技术改进的方式是目前绝大多数厂商在新能源车中采用的方式,原有的真空助力器以及相关管路得到保留,管路的另一端连接的电子真空助力泵,当传感器监测到助力器真空度不足时,电子真空泵开始工作维持真空环境,通过这样的方式,确保真空助力器能够像原先一样为驾驶员提供辅助作用。不过,这样的电子真空助力泵的噪音较大,此外更重要的是,电子真空泵的工作稳定性以及寿命都不太适合当做主要及唯一的真空源供应部件(原先在传统汽车上,它只是辅助维持真空环境)。显然,这样的方案是来自传统的汽车研发理念,而并非是站在新能源车的开发角度来解决问题。 ● 舍弃真空在制动系统中的用途
制动工况对电动汽车制动能量回收影响分析 前言 随着能源和环境问题日益突出,电动汽车已成为替代传统内燃机汽车的最佳选择。受限于当前技术条件,电动汽车续驶里程普遍较短,电动汽车节能技术成为电动汽车研究的重要方面,其中再生制动作为电动汽车节能主要手段,受到国内外学者广泛关注[1-2]。设计阶段的电动汽车结构和动力系统设计、运行阶段的控制策略和制动工况等都是影响再生制动能量回收效果的因素[3]。 目前,制动工况方面的分析研究,多集中对制动工况进行解耦,分别研究制动初速度和制动强度对制动回收能量效果的影响[4-6],并未综合分析制动工况各因素影响能量回收效果之间的耦合关系,或分析制动强度与制动初始速度对能量回收效果贡献大小。 制动工况分为两种,单次制动工况和循环制动工况[7],循环制动工况多用在试验条件下对电动车性能测试,日常驾驶中更多应用的是单次制动工况。单次制动工况为本文研究工况,其影响因素包含两个方面:制动强度(z )和制动初速度。 本文以较为普遍的集中电机前轴驱动电动汽车为研究对象,采用制动稳定性较好的理想制动力分配策略,利用Matlab/Simulink 与Isight 建立联合仿真平台,对由制动初速度和制动强度组成的连续设计空间进行试验设计(DOE)。采用最优拉丁超立方设计(Optimal latin hypercube design ,OptLHD)对连续设计空间进行采样,分析制动回收能量与制动初速度和制动强度之间的关系,分析制动工况对制动能量回收的主效应和交互效应,和影响制动能量回收的主次因素。 1制动能量回收影响因素分析 再生制动时受各种阻力损耗、摩擦制动器消耗、电机和电池工作特性和效率、相关部件工作效率等方面的影响,未能将制动动能完全转化为电能存储在蓄电池中。综上各方面将主要因素分为一下三类: (1)影响制动总能量的因素,制动总能量计算公式为()222 1e s v v m E -=(式中,E 为制动总能量,kJ ;m 为电动车整备质量,kg ;s v 和e v 分别为为车辆制动初始和终止速度,1s m -?),得出影响因素主要是制动初速度、电动汽车整备质量等。 (2)影响可回收能量的因素,如制动强度、车辆结构(滚动阻力消耗、空气阻力消耗等)、制动力分配策略(摩擦制动损耗)等。 (3)影响再生制动回收能量的因素,如驱动系统布置、电机和电池工作特性、传动系统特性、各部件及传递线路损耗、控制器损耗等。 以上影响因素主要归为四个方面:车辆结构、动力系统结构、制动工况、制动控制策略,在设计阶段车辆结构、动力系统结构和控制策略确定后,制动工况成为可根据驾驶员主观操纵的影响再生制动能量回收效果的唯一因素。 2仿真模型与验证 2.1理想再生制动力分配策略 本文采用文献[8]中制定的理想制动力分配策略。理想再生制动力分配策略可以保证前后轴制动力得到合理分配,制动稳定性好,该策略包含制动力在前后轴的分配及在电机制动力与摩擦制动力之间的分配两部分。分配电机制动力和摩擦制动力时要优先利用电机制动力,不足部分再由摩擦制动力补充。 2.2建立仿真模型 使用MATLAB/Simulink 建立整车、电机、电池和控制策略等模型,整车参数如表1所示。
变频器回馈制动原理、算法及其特点 为了提高节电效果,减少制动过程的能量损耗,将减速能量回收反馈到电网去,达到节能功效时,它也是必须采用的。目前国内各地由于经济高速发展而纷纷闹电荒的时候,推广和应用回馈制动器,具有重要的节能意义。所以加快国内相关产品的研发和生产具有重大的现实意义。 1引言 目前,交流变频调速系统广泛采用简单的能耗制动,存在浪费电能、电阻发热严重,快速制动性差等缺点。而在异步电动机频繁制动时,采用回馈制动是一种非常有效的节能方法,并且避免在制动时对环境及设备的破坏。在电力机车、采油等行业中取得令人满意的效果。在新型电力电子器件不断出现、性价比不断提高,人们节能降耗意识提高的的情况下有着广泛的应用前景。 能量回馈制动装置特别适用于电动机功率较大,如大于等于100kw以上,设备的转动惯量gd2较大,属反复短时连续工作制,从高速到低速的减速降幅较大,制动时间又短,又要强力制动的场合。为了提高节电效果,减少制动过程的能量损耗,将减速能量回收反馈到电网去,达到节能功效时,它也是必须采用的。 2回馈制动原理 在变频调速系统中,电动机的降速和停车是通过逐渐减小频率来实现的,在频率减小的瞬间,电动机的同步转速随之下降,而由于机械惯性的原因,电动机的转子转速未变,它的转速变化是有一定时间滞后的,这时会出现实际转速大于给定转速,从而产生电动机反电动势e高于变频器直流端电压u的情况,即e>u。这时电动机就变成发电机,非但不要电网供电,反而能向电网送电,这样既有良好的制动效果,又将动能转变化为电能,向电网送电而达到回收能量的效果,一举两得。当然必须有一套能量回馈装置单元,进行自动的控制,才能做到,其原理框图如图1所示。另外,能量回馈电路还应包括交流、直流电抗器、阻容吸收器、电子开关器等。 变频器回馈制动电路原理框图 众所周知,一般通用变频器其桥式整流电路是三相不可控的,因此无法实现直流回路与电源间双向能量传递,解决这个问题的最有效方法是采用有源逆变技术,整流器部分采用可逆整流器,又叫网侧变流器。通过对网侧变流器的控制将再生电能逆变为与电网同频率电网同频率、同相位的交流电回馈电网,从而实现制动。以前有源逆变单元主要采用晶闸管电路,这种电路只有在不易发生故障的稳定电网电压下(电网电压波动不大于10%),变流器才能安全地进行回馈运行。这种电路只有在不易发生故障的稳定电网电压下(电网电压波动不大于10%),变流器才能安全地进行回馈运行。因为在发电制动运行时,电网电压制动时间大于2ms,则可能发生换相失败,损坏器件。另外,本方式在深控时,功率因数低、谐波含量高、换相重叠将引起电网电压波形畸变。同时控制复杂,成本较高。随着全控型器件的实用化,人们又研究出斩控式可逆变流器,采用pwm控制方式。这样网侧变
电动汽车制动能量回收控制策略的研究2008-01-20 摘要:电动汽车的驱动电机运行在再生发电状态时,既可以提供制动力,又可以给电池充电回收车体动能,从而延长电动车续驶里程。对制动模式进行了分类,并详细探讨了中轻度刹车时制动能量回收的机制和影响因素。提出了制动能量回收的最优控制策略,给出了仿真模型及结果,最后基于仿真模型及XL型纯电动车对控制算法的效果进行了评价。 关键词:制动能量回收电动汽车镍氢电池 Simulink模型 电动汽车(EV)的研究是在环境保护问题及能源问题日益受到关注的情况下兴起的。在EV性能提高并逐步迈向产业化的过程中,提高能量的储备与利用率是迫切需要解决的两个问题。尽管蓄电池技术有了长足进步,但由于受安全性、经济性等因素的制约,近期不会有大的突破。因此如何提高EV能量利用率是一个非常关键的问题。 制动能量回收问题对于提高EV的能量利用率具有重要意义。电动汽车采用电制动时,驱动电机运行在发电状态,将汽车的部分动能回馈给蓄电池以对其充电,对延长电动汽车的行驶距离是至关重要的。国外有关研究表明,在存在较频繁的制动与起动的城市工况运行条件下,有效地回收制动能量,可使电动汽车的行驶距离延长百分之十到百分之三十。 目前国内关于制动能量回收的研究还处在初级阶段。制动能量回收要综合考虑汽车动力学特性、电机发电特性、电池安全保证与充电特性等多方面的问题。研制一种既具有实际效用、又符合司机操作习惯的系统是有一定难度的。本文对上述问题作了一些积极的探索,并得出了一些有益的结论。 1制动模式 电动汽车制动可分为以下三种模式,对不同情况应采用不同的控制策略。 1.1急刹车 急刹车对应于制动加速度大于2m/s2的`过程。出于安全性方面的考虑,急刹车应以机械为主,电刹车同时作用。在急刹车时,可根据初始速度的不同,由车上ABS控制提供相应的机械制动力。 1.2中轻度刹车 中轻度刹车对应于汽车在正常工况下的制动过程,可分为减速过程与停止过程。电刹车负责减速过程,停止过程由机械刹车完成。两种刹车的切换点由电机发电特性确定。
基于自寻优控制的纯电动汽车制动能量 回收策略可行性分析 倪兰青,南京航空航天大学 本课题应从三部分入手,一是汽车建模部分;二是ABS 自寻优控制部分;三是再生制动部分。 一:车辆动力学建模(以单轮模型为例) 1.1 单轮车辆模型 车辆运动方程:Fx v M -=? 车辆运动方程:Tb Tg Tb rFx I -=-=? ω 车轮纵向摩擦力:=x F μN 其中,M:汽车质量,Fx:轮胎和底面间的附着力,I :车轮转动惯量,ω:车轮角速度,r:车轮有效半径,Tg:地面制动力矩,Tb :制动器制动力矩,μ:地面摩擦系数,N :车轮对地面压力 1.2 轮胎模型 ⑴由于主要研究纵向制动特性,可以选用参数较少并能反映纵向附着系数μb 与滑移率S 关系的Burckhardt 模型。 s c e c s c 31)1(2 --=-μ 式中c1、c2、c3为参考系数,下表给出了其在不同路面条件下的取值及该路面最佳滑移率Sopt 和最大附着系数μmax 。 ⑵双线性模型 在一些情况下,为了获得一种解析解,用这种双线形模型来简化轮胎模型, 如下图所示:
c s s h μμ= c g h c h g s s s s --- --= 11h μμμμμ,其中,c s :最佳滑移率,g μ:滑移率为1时的附着系 数:s:车轮滑移率; h μ:峰值附着系数。 1.3 液压制动系统部分 液压制动系统包括两部分:一部分是液压传动系统;另一部分是制动器。为进行实时模拟计算,可以建立经验式的l 、2阶模型系统。为简化系统,忽略了电磁阀弹簧的非线性因素及压力传送的延迟,其传递函数为: ) 1(+= TS S K G 式中:K 为系统的增益,K=100;T 为系统时间常数,T=0.01。制动器力学模型描述了制动轮缸压力输入及制动力矩输出间的力学特性。为了简化仿真研究,在进行仿真时假设制动器为理想元件,如果忽略非线性和温度的影响,制动力矩瓦可以看作是制动压力P 的线性函数: Tb=kP 式中:Tb 为车轮制动力矩;k 为制动器制动效能因数(通过试验可以得到);P 为液压传动系统输出压力。 1.4 滑移率的计算 滑移即为汽车制动时出现车轮速度小于汽车车身速度而导致车轮即滚动又滑动的现象。车轮的滑移率定义为: %100?-=v r v ωλ
制动工况对电动汽车制动能量回收影响分析 摘要:为提高再生制动能量回收效果,本文从制动工况角度出发,分析了制动工况对再生制动能量回收效果的影响。制动工况包括制动初速度和制动强度两个因素,通过在Matlab/Simulink 与Isight 建立联合仿真平台,对由制动初速度和制动强度组成的连续设计空间进行试验设计(DOE),分析两者对制动能量回收效果的影响关系,得到两者对能量回收的贡献率,为驾驶员制动提供指导依据。 关键词:电动汽车;再生制动;制动强度;制动初速度;工况分析; 前 言 随着能源和环境问题日益突出,电动汽车已成为替代传统内燃机汽车的最佳选择。受限于当前技术条件,电动汽车续驶里程普遍较短,电动汽车节能技术成为电动汽车研究的重要方面,其中再生制动作为电动汽车节能主要手段,受到国内外学者广泛关注[1-2]。设计阶段的电动汽车结构和动力系统设计、运行阶段的控制策略和制动工况等都是影响再生制动能量回收效果的因素[3]。 目前,制动工况方面的分析研究,多集中对制动工况进行解耦,分别研究制动初速度和制动强度对制动回收能量效果的影响[4-6],并未综合分析制动工况各因素影响能量回收效果之间的耦合关系,或分析制动强度与制动初始速度对能量回收效果贡献大小。 制动工况分为两种,单次制动工况和循环制动工况[7],循环制动工况多用在试验条件下对电动车性能测试,日常驾驶中更多应用的是单次制动工况。单次制动工况为本文研究工况,其影响因素包含两个方面:制动强度(z )和制动初速度。 本文以较为普遍的集中电机前轴驱动电动汽车为研究对象,采用制动稳定性较好的理想制动力分配策略,利用Matlab/Simulink 与Isight 建立联合仿真平台,对由制动初速度和制动强度组成的连续设计空间进行试验设计(DOE)。采用最优拉丁超立方设计(Optimal latin hypercube design ,OptLHD)对连续设计空间进行采样,分析制动回收能量与制动初速度和制动强度之间的关系,分析制动工况对制动能量回收的主效应和交互效应,和影响制动能量回收的主次因素。 1 制动能量回收影响因素分析 再生制动时受各种阻力损耗、摩擦制动器消耗、电机和电池工作特性和效率、相关部件工作效率等方面的影响,未能将制动动能完全转化为电能存储在蓄电池中。综上各方面将主要因素分为一下三类: (1)影响制动总能量的因素,制动总能量计算公式为()222 1e s v v m E -=(式中,E 为制动总能量,kJ ;m 为电动车整备质量,kg ;s v 和e v 分别为为车辆制动初始和终止速度,1s m -? ),得出影响因素主要是制动初速度、电动汽车整备质量等。 (2)影响可回收能量的因素,如制动强度、车辆结构(滚动阻力消耗、空气阻力消耗等)、制动力分配策略(摩擦制动损耗)等。 (3)影响再生制动回收能量的因素,如驱动系统布置、电机和电池工作特性、传动系统特性、各部件及传递线路损耗、控制器损耗等。 以上影响因素主要归为四个方面:车辆结构、动力系统结构、制动工况、制动控制策略,在设计阶段车辆结构、动力系统结构和控制策略确定后,制动工况成为可根据驾驶员主观操纵的影响再生制动能量回收效果的唯一因素。 2 仿真模型与验证 2.1 理想再生制动力分配策略
现代汽车电子技术 题目:电动助力转向系统 摘要 本文从全球环境污染和能源短缺等严峻问题阐述了发展电动汽
车的重要性和必要性,着重分析概括了电动汽车制动能量回收系统的研究现状 关键字电动汽车制动能量回收系统 1 引言 目前,普通燃油汽车在国内外仍占据绝大部分汽车市场。汽车发动机燃烧燃料产生动力的同时排放出大量尾气,其成分主要有二氧化碳(CO2),一氧化碳(CO),氮氧化合物(NO X)和碳氢化合物(HC),还有一些铅尘和烟尘等固体细微颗粒物,虽然现代汽车技术已经使汽车尾气排放降到很低,但由于汽车保有量持续高速增加,汽车排放的尾气还是会对人类的生存环境造成很严重的影响,例如近年来不断加剧的温室效应,光化学烟雾,城市雾霾等大气污染现象。 内燃机汽车消耗的能源主要来自石油,石油属于不可再生资源,目前全球已探明的石油总量为12000.7亿桶,按现在的开采速度将只够开采40.6年左右,即使会不断发现新的油田,但总会有消耗的一天。全球交通领域的石油消耗占石油总消耗的57%,由于汽车的保有量持续快速增长(主要来自发展中国家),到2020年预计这一比例将达到62%以上,2010年我国的石油对外依存度已达到53.8%,到2030年预计这一比例将达到80%以上,可见石油资源的短缺将会直接影响我国的能源安全,经济安全和国家安全,不利于我国长期可持续的发展,因此探索石油以外的汽车动力能源是21世纪迫切需要解决的问题。 电动汽车具有无污染,已启动,低噪声,易操纵等优点,相关的技术研究已趋成熟,是公认的未来汽车的主流。自1997年10底丰田推出混合动力车型Prius 以来,电动汽车越来越受市场的欢迎,近年来不少国内外汽车生厂商已向市场推出不少种类的电动汽车,在混合动力汽车领域,日本的丰田和本田不管从技术研发还是在市场销售,宣传等方面已经走在世界的前列,推出了诸如Pius,Insight,Fit,Civic 等量产化混合动力车型,其他国外汽车制造商在本田和丰田之后也相继推出相应的车型,例如宝马3系,5系,7系,8系都推出了相应的混合动力车型,大众途锐的混合动力版,特斯拉推出的MODEL S 纯电动车,国内汽车生产商比亚迪在电动汽车领域已经走在前列,相继推出包含“秦”在内的许多种混合动力车型。
制动能量回馈系统协调控制 张俊智,张鹏君,陆欣,陈鑫 清华大学汽车安全与节能国家重点实验室,北京,100084 【摘要】本文为混合动力电动汽车设计了分层控制的制动能量回馈系统,该分层结构主要包括驾驶员意图识别、能量管理和元件协调控制三个部分。分层控制结构的采用,将复杂的制动能量回馈系统简化为若干部分,降低了控制难度,为研究提供了便利。所设计的系统已在一款串联混合动力客车上实现,并根据中国城市公交循环工况进行了道路测试。 【关键词】混合动力电动汽车,制动能量回馈系统,分层控制结构,协调控制 Coordinated Control for Regenerative Braking System Zhang Junzhi, Zhang Pengjun, Luxin, Chen Xin State Key Lab. of Automotive Energy and Safety, Tsinghua University, Beijing, China, 100084 Abstract: This paper presents a design of regenerative braking system(RBS) for hybrid electric vehicles using hierarchical control structure and method. The hierarchical model is mainly composed of three modules for driver intent identification, energy management and coordinated control based on components control. As a consequence, RBS, a complicated hybrid dynamic system, is successfully decomposed by several simple modules. The control system and strategies are carried out on a typical serial HEV bus, and tested on road based china typical urban cycle.. Key words: hybrid electric vehicles, regenerative braking system, hierarchical control structure, coordinated control 1 介绍 车辆的动能通过制动能量回馈系统可转化为其它形式能量储存起来,并进一步用于车辆驱动。研究显示,在城市驾驶循环中,发动机发出能量的大约1/3至1/2被制动过程所消耗[1,2]。因此,回馈制动是车辆提高燃油经济性并降低排放的有效方法,有助于缓解能源危机和环境污染。