
《控制工程基础》期末复习题答案
一、选择题
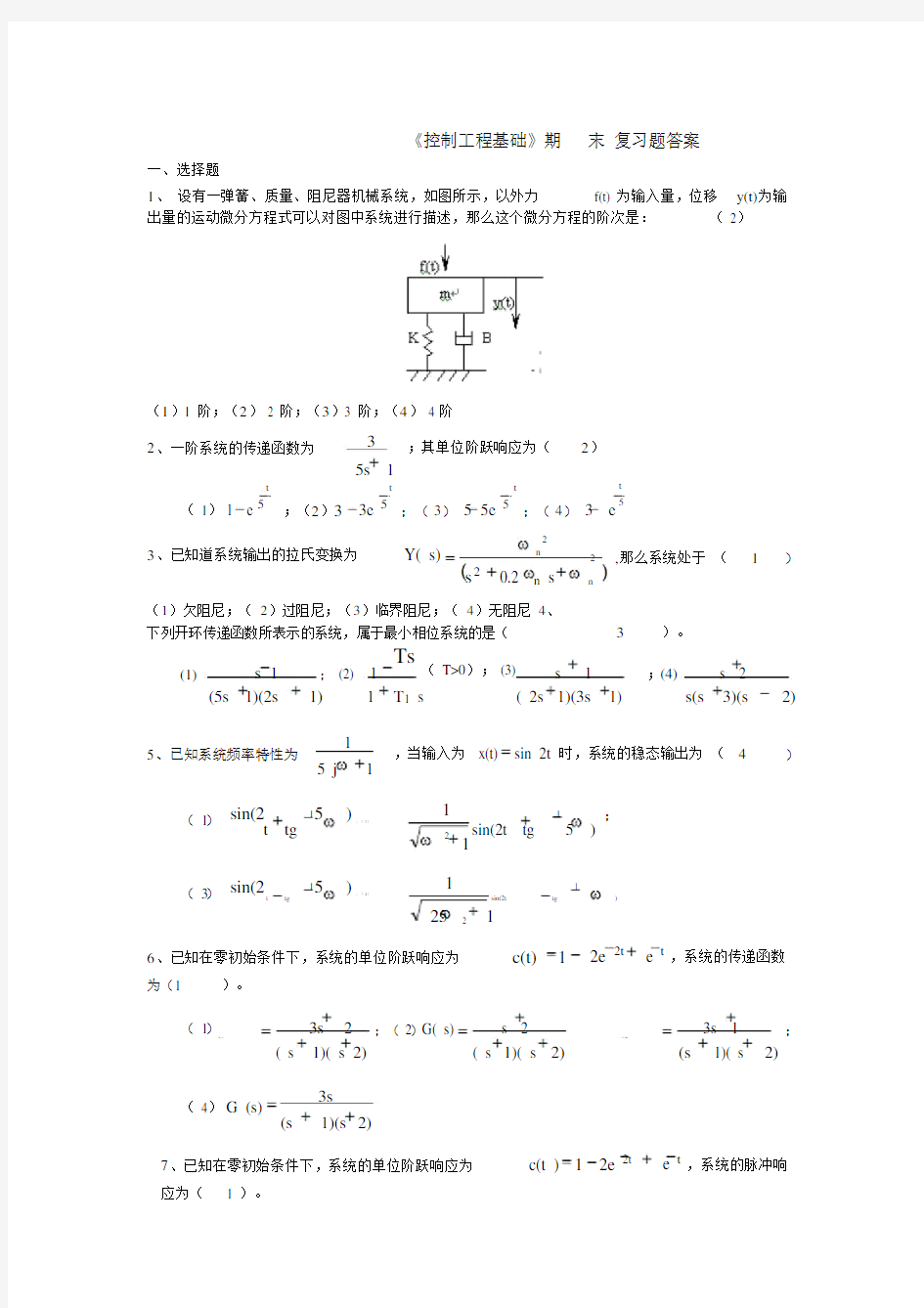
1、设有一弹簧、质量、阻尼器机械系统,如图所示,以外力f(t) 为输入量,位移y(t)为输出量的运动微分方程式可以对图中系统进行描述,那么这个微分方程的阶次是:( 2)
(1)1 阶;(2) 2 阶;(3)3 阶;(4) 4阶
2、一阶系统的传递函数为
3;其单位阶跃响应为(2)
5s1
t t t
( 1)1 e5;(2)33e 5;(3) 55e 5;(4) 3 e
2t 5
3、已知道系统输出的拉氏变换为Y( s)n2
s20.2 n s n
(1)欠阻尼;(2)过阻尼;(3)临界阻尼;(4)无阻尼4、
下列开环传递函数所表示的系统,属于最小相位系统的是(,那么系统处于(1)3)。
(1)s1; (2)1Ts
( T>0); (3)s1;(4)s 2
(5s 1)(2s1)1T1 s( 2s1)(3s1)s(s3)(s2)
5、已知系统频率特性为
1
,当输入为 x(t)sin 2t 时,系统的稳态输出为(4)5 j1
( 1)sin(215)11;
;( 2)
t tg
21
sin(2t tg5)
( 3)sin(215)11
;( 4)
t tg
252
sin(2t tg5)
1
6、已知在零初始条件下,系统的单位阶跃响应为c(t)12e 2t e t,系统的传递函数为(1)。
( 1)3s2;( 2)G( s)s 23s 1;
G ( s)
( s1)( s( s1)( s2);( 3)G(s)1)( s
2)(s2)
( 4)G (s)
3s
(s1)(s2)
7、已知在零初始条件下,系统的单位阶跃响应为c(t )12e 2t e t,系统的脉冲响应为( 1 )。
(1)(3)k(t )4e
k(t )4e
2t
2t
e
e
t(2)
k(t )4e t e t
t
(4) k(t)4e t e 2t
8、系统结构图如题图所示。试求局部反馈 2 加入前后系统的静态速度误差系数和静态加
速度误差系数。(3)
(1)K v0.5 , K a0.5;(2) K v0 ,K a0.5;(3) K v0.5 , K a0 ;(4) K v0 ,K a 0 ;
2
9、已知道系统输出的拉氏变换为Y (s)n,那么系统处于(3)
2
s n
(1)欠阻尼;( 2)过阻尼;(3)临界阻尼;( 4)无阻尼
10、设有一 RLC 电路系统,如图所示,以Ur(t) 为输入量, Uc(t) 为输出量的运动微分方程式
可以对系统进行描述,那么这个微分方程的阶次是:( 1)
(1)1 阶(2)2阶(3)3阶(4)4阶
11、已知F ( s)
s22s3
,其原函数的终值 f (t)(3)s(s25s4)t
(1)0 ;(2)∞ ;( 3)0.75 ;(4) 3
12、一阶系统的传递函数为
3
;其单位阶跃响应为(2)5s1
t t t t ( 1)1 e5;( 2)3 3e5;( 3)5 5e5;( 4)3 e5 13、已知系统的微分方程模型
y( 3) (t ) 2 y (2) (t )y'(t)5y(t) 3t5u'(t)2u(t)
y( )d
。其中 u(t)是输入量, y(t)
是输出量。求系统的传递函数模型G(S)=Y(S)/U(S) 为( 1)
( 1) G(s)
s(5s2)
(2)G(s)
s(5s2) 432
5s 3
432
5s s2s s s2s s
(3) G(s)s(5s1)(4) G(s)(5s1)
s42s3s25s 12s3s25s 1
s4
14、某一系统的速度误差为零,则该系统的开环传递函数可能是(4)
K
; (2)s d K
;(4)
K
;
(1)
s(s a)(s b); (3)
a)s2 (s a)
Ts1s(s
15、根据下列几个系统的特征方程,可以判断肯定不稳定的系统为(2)
( 1)as3bs2cs d0 ;(2) s4as3bs2cs d 0;
( 3)as4bs3cs2ds e0 ;其中a、 b、 c、 d、 e均为不等于零的正数。
二、简答题
(1)图 1 是仓库大门自动控制系统原理示意图。试说明系统自动控制大门开闭的工作原理,
并画出系统方框图。
图2-1
解:当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏
差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。系统方框图如图解 1-2 所示。
(2)、如图所示为控制系统的原理图。
(1)指出系统的控制对象、被控量、给定量及主要干扰。
(2)画出系统的原理结构图,并指出各个组成元件的基本职能。
(3)说明如何改变系统的给定量输入。
(4)判断对于给定量输入及主要干扰是否有静差。
解:
图2-2
(1) 控制对象:水池水量;被控制量:水位;给定量:电位器 E 右侧电位
主要干扰:出水量的变化
(2)原理结构图:
H0给定装置Ei比较装置E执行装置V控制对象H (电机电位 )(电位差 )(电动机)(蓄水池)
Ef
量测装置
(浮桶杠杆机构 )
H0: 要求水位, Ei: 设定电位; Ef: 反馈电位; E: 电位差; V: 进水流量; H: 蓄水水位;
(3)改变和电机相连的触头位置可以改变给定量输入。
(4)对给定量输入和主要干扰都是无静差。
(3)题图为工业炉温自动控制系统的工作原理图。分析系统的工作原理,指出被控对
象、被控量和给定量,画出系统方框图。
图2-3
解:加热炉采用电加热方式运行,加热器所产生的热量与调压器电压u c的平方成正比,u c增高,炉温就上升,u c的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流
电动机驱动。炉子的实际温度用热电偶测量,输出电压u f。 u f作为系统的反馈电压与给定电压 u r进行比较,得出偏差电压u e,经电压放大器、功率放大器放大成u a后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T °C,热电偶的输出电压u f正好等于给定电压u r。此时, u e u r u f0 ,故 u1u a0 ,可逆电动机不转动,调压器的滑动触点停
留在某个合适的位置上,使u c保持一定的数值。这时,炉子散失的热量正好等于从加热器
吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度 T °C由于某种原因突然下降( 例如炉门打开造成的热量流失),则出现以下的控制过程:
控制的结果是使炉膛温度回升,直至T °C的实际值等于期望值为止。
T C u f u e u1u a u c T C
系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压 u r(表征炉温的希望值)。系统方框图见图解 1-3。
三、计算题
(1)求如图所示电路网络的传递函数。其中,u0(t)为输出电压, ui(t) 为输入电压, R1 和 R2为电阻, C1 和 C2 为电容。
C1
R1 u i
R2
u0
C2
图 1
1
(t )dt Ri1 (t)
i1
C1
、解 u i (t)u0 (t)R1i 2 (t)
u0 (t )
1
[i1 (t) i 2 (t )]dt[i1 (t ) i 2 (t)] R2 C 2
消去中间变量i1 和 i2,得
d 2u o (t)du o (t)
u0(t) R1 R2 C1C2d 2u i(t )
R1 R2C1C2
dt 2(R1C1 R2C2R1C2 )
dt2 du i (t )
dt
(R1C1 R2C2u i (t )
R1C2 )
dt
(2)已知系统的特征方程为s420s315s22s K 0
,试确定参数K 的变化范围以
使系统是稳定的。
解:列劳斯表:
4
115K S
S32020 S2149K0
10
S1298200K00 S0
149
K00 298 200K0
k 0
(3) 利用 Mason 公式求如图所示传递函数C(s)/R(s)
解:图中有 2 条前向通路, 3 个回路,有 1 对互不接触回路
P1G1G2G3,11, P2G4 G3,21L1,
L1G1G2H 1, L2G3H 2, L3G2H3,
1 (L1L
2 L
3 ) L1 L2,
则有
C( s)P1 1P2 2G1G2 G3G4G3(1 G1G2H1 )
R( s) 1 G1G2 H1 G3H 2 G2H 3 G1G2G3H1H 2
(4) 、一阶系统结构图如题图所示。要求系统闭环增益K2 ,调节时间 t s0.4 (s),试确定参数 K1 , K 2的值。
解:由结构图写出闭环系统传递函数
K 11
(s)
s K 1K 2
K1
K
2
s K 1 K 2s
1 1s K
1K2
令闭环增益K
1
2 ,得: K20.5 K 2
令调节时间 t s 3T
3
0.4 ,得:K115 。K1K2
4
G(s)
(5) 、单位反馈系统的开环传递函数 s( s 5)
,求单位阶跃响应
h(t)
和调节
时间 t
s 。
解:依题,系统闭环传递函数
(s)
4
4
4
2
5s 4 (s 1)( s 4)
1
1
s
)( s
( s
)
T 1 T 2 C (s)
(s)R( s)
4
= C 0
C 1
C 2
s
s 1 s 4
s(s 1)(s 4)
C 0 lim s ( s) R(s) lim
4
1
1)( s
4)
s
s 0
(s
C 1
lim (s
1) (s) R(s)
4
4
lim
4) 3
s
1
s
s(s
C 2
lim (s
4) (s) R(s)
4
1
lim
1)
3
s
4
s
s( s
h(t)
1 4 e t
1 e 4t
3 3
T 1 1
T 2 0.25
T 1 4 ,
t s
t s
T 1 3.3T 1
3.3。
T 2
T 1
(6) 、已知开环传递函数为 G (s)
10
,画出对数幅频特性的折线图
s( s 1)( s 5)
( BODE 图),并求系统的相位裕量 ,判断闭环系统的稳定性 .
-20
-40
5
1
-60
可算出相位裕量21 度。闭环系统稳定
(7) 试求如图所示系统总的稳态误差,已知r(t)=t,n(t)=1(t)
N(s)
C(s) E(s)K1/(T1s+K2/s(T2s
R(s)
1)+1)
解: 1 K 2
e
ss
K1K 2
如果直接给出结果,并且正确,可以给满分
(8)、已知系统的开环传递函数为
Q( s)K (0.5s1)
2 (0.1s 1)(0.02s 1)
s
其中K分别为10 和 180,分别判断闭环系统的稳定性。若稳定,求出相位稳定裕量。
解:开环传递函数: Q s
K 0.5s 1
,幅频特性单调下降,转折频率分别为:s20.1s10.02s1
2, 10, 50;在区间 [2,10]内计算如下:
20 lg 180 20 lg c40 lg 2得c5/s
,并在区间[2,10]内,解有效。
rad
1
r 180
arctg 2.5 arctg 0.5 arctg 0.1 35.9 ,所以闭环系统稳定。( 10
分)
当 K=180 时 bode 图如下:在区间 [10,50] 内计算如下:
20 lg 10
40 lg 2 20 lg
10
40 lg
c 得
c 30ra
d / s ,解在区间 [10,50] 内。
2 10
r 0 , 所以闭环系统不稳定
( 10 分)
(9) 、要求系统为一阶无静差,且要求 Kv=300/s , wc=10rad/s , =50 度。求期望的开环传递函数
解:已知系统为一阶无静差系统,
K v
300 / s, c 10rad / s,50
首先,根据系统的动态要求,即由
c 和
设计开环特性中频段的形状,即简化模型。
首先求出闭环幅频特性峰值为:
M
1 1.3 (3 分)
sin
M 1 再求中频段的长度 h :h
7.7(6分)
M
1
3 再由
C
2h 3
rad / s 1.77, 3 1.77 c 17.7rad / s, 2
h
2.3
h 1
然后根据稳定指标要求,即
K v 300 / s ,决定
1
2 c
rad /
s
K S
0.077
-20db/10 倍频
可以大致作出 bode 的形状,如图所示:
-40db/10 倍频
T1=1/0.077=13;
-20db/10 倍频
T2=1/2.3=0.43
w 1 w 1’
w 2 w 2’wc
w 3
T3=1/17.7=0.056
-40db
不考虑
1 的影响的时候,开环传递函数为:
300 0.43s
1
(6 分)
Q s
s 13s 1 0.056s 1
考虑到
1 对中频相位裕量的影响,要缩短
h 的长度,让
2 变为 2
1
2 ,修正后
K v212308 / s
C C
11
如保持修正后保持K v不变:则1c20.079rad / s
Kv
根据上图中的修正后系统的开环bode 图得传递函数为:
3001s 1
Q s 2.377(5 分)
1
1
s 11
s s
0.07917.7
因为 w1增加了系统的稳定裕量,给系统带来好处所以可以不修正。