Elektronikon控制器操作说明书Array
第一章概述
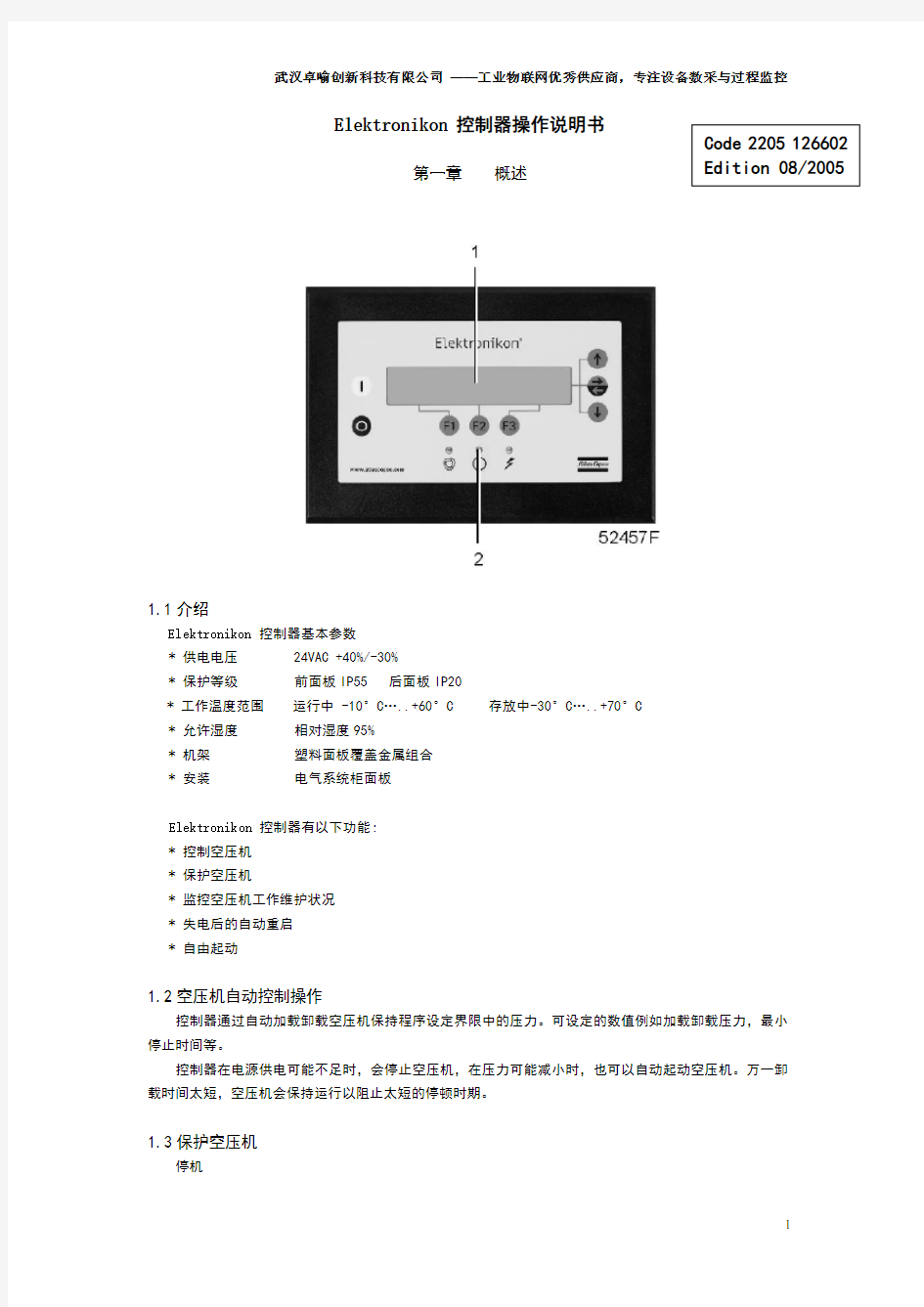
1.1介绍
Elektronikon控制器基本参数
* 供电电压 24VAC +40%/-30%
* 保护等级前面板IP55 后面板IP20
* 工作温度范围运行中 -10°C…..+60°C 存放中-30°C…..+70°C
* 允许湿度相对湿度95%
* 机架塑料面板覆盖金属组合
* 安装电气系统柜面板
Elektronikon控制器有以下功能:
* 控制空压机
* 保护空压机
* 监控空压机工作维护状况
* 失电后的自动重启
* 自由起动
1.2空压机自动控制操作
控制器通过自动加载卸载空压机保持程序设定界限中的压力。可设定的数值例如加载卸载压力,最小停止时间等。
控制器在电源供电可能不足时,会停止空压机,在压力可能减小时,也可以自动起动空压机。万一卸载时间太短,空压机会保持运行以阻止太短的停顿时期。
1.3保护空压机
停机
几个传感器提供给空压机进行检测。假若这些测量值超出了控制器设定的停机警戒线,空压机将被停下。同时屏幕1将会立即显示停机消息,以及报警灯2将会闪动。
停机报警
停机报警警戒线是可设定的,低于最低停机警戒线的报警届限。假若传感器测量值超出了控制器设定的停机报警警戒线,屏幕1将会立即显示报警消息,以及报警灯2将会闪动。
报警信息会很快随着报警条件的消失而消失。
失电后的自动重启
控制器固化了空压机失电后的自动重启功能,根据需要设置将该功能激活。
自由起动
给予起动命令后(通过控制器自动起动或是手动起动),进入自由起动操作。
第二章控制面板
表一:控制面板操作
第三章功能键
功能键
功能键1用途:
* 手动加载卸荷空压机
* 响应或程序设定
* 主机过载,停机,维护信息,急停状态复位
* 存取控制器收集的数据
功能键功能的改变取决于屏幕菜单。它最普通的功能列于下表。表二:功能键功能
第四章滚动键
滚动键1可以在显示中进行滚动操作。
只要在屏幕中最右侧可以见到向下的箭头指示,就可以利用同样符号的滚动键查看下一个项目。只要在屏幕中最右侧可以见到向上的箭头指示,就可以利用同样符号的滚动键查看上一个项目。
第五章控制程序
为了方便编程和控制,控制软件已经固化在控制器中。
显示控制器控制软件的菜单项目层次的结构图见附页。
第六章激活菜单
当控制器上电时,主屏幕将会立即显示。
以下是空压机进入工作状态的一个画面例子。
在按下F1“菜单”键后,菜单“状态数据”将在水平箭头处出现。
* 按确认键2以便选择该菜单,若当前空压机状态符合起动条件,主屏幕将会出现以下画面。
若当前空压机状态不符合起动条件,也既出现报警状态,则会出现报警信息,详细见8.3节。
* 或者通过滚动键1与确认键2选择其它菜单
单独按下滚动键1的下滚动键可以快速查看当前空压机的状态,见附页菜单项目层次的结构图。
第七章主屏幕菜单
7.1功能
主屏幕菜单显示了空压机操作状态以及它是控制器其它功能菜单的入口。
7.2操作程序
当控制器电源接入时,主屏幕立即显示并进入到初始的工作状态屏幕。
假如上电后滚动键1,确定健2与功能键3数分钟未使用时,控制器将返回并保持主屏幕显示状态。
任何子菜单屏幕显示的情况下,按下F1“主显示屏”键将返回主屏幕。
下面是一个主菜单显示状态的一个例子,该例子显示的是空压机正在加载状态。
屏幕指示如下:
* 工作传感器名称和它的实际读数值。
* 空压机运行状态信息
* 功能键3的不同实际功能由屏幕指示
* 按功能键3中的F1“菜单”键将进入子菜单
* 按功能键3中的F3“卸载”键将进行进入手动卸载
第八章状态数据子菜单
8.1注意
在任何的维护保养工作进行之前,按下停止按钮4,直到空压机停止。再按下急停开关,断开总断路器(用户安装)以将空压机与总电源断开。
8.2功能
状态数据子菜单给出了空压机保护功能的信息(停机,停机报警,维护报警等)以及允许停机,电机过载和维护状态的复位。
8.3操作程序
从主屏幕开始(见主屏幕菜单)
* 按下F1“菜单”键,选项“状态数据”直接由水平箭头选中
* 按确认键2,会立即出现以下几种可能的屏幕界面
A没有信息存在的情况
假若报警灯1不亮,屏幕上立即显示所有工作条件正常。显示下图
B停机信息出现的情况
假若报警灯1闪动或空压机的输出气温温度太高,显示下图
指示(***)不停的闪烁,屏幕显示实际的读数和关机的状态
对其它的报警停机状态也会有相应的报警停机画面。
在报警停机状态未排除前,通过翻页仍然可以进入其它菜单,但报警指示灯以及指示(***)仍然闪烁。检查其它相应参数的设置。当进入到“状态数据”菜单/“保护”项,“停机”将闪烁,可通过确认键选择并返回到上一级停机状态屏。
8.4停机复位
* 断开电压排除故障,故障排除停机条件消失后,上电并按下F3“重置”键。主显示屏将显示所有工作条件正常的画面。见8.4节。此时可通过起动按钮3重新起动空压机。
* 按下“菜单”和“主显示屏”键,返回到主屏幕并通过起动按钮3重新起动空压机。
8.5停机警报信息出现
* 停机报警警戒值是一可设定的低于停机值的数值。假如停机报警出现,指示灯1亮着,主屏幕将变成类似下面的屏幕显示。
* 报警信息“停机报警”出现
* 按下F1“菜单”键和确认键2以选择“状态数据”菜单,项目“保护”在闪烁
* 滚动箭标用确认键2选定,出现类似于下面的屏幕显示
* 屏幕出现了空压机出口温度及最大停机报警温度
* 通过停止按钮停下空压机,等待直至报警停止
* 关掉电源,检查并排除故障
* 一旦报警条件消失,报警信息亦立即消失。
8.6维护报警信息出现
* 指示灯1亮,主屏幕会改变成类似于下面的屏幕显示
* 指示(***)在闪烁,维护报警信息出现
* 按下F1“菜单”键和确认键2以选择“状态数据”菜单,项目“维护保养”闪烁
* 滚动箭标做出相应选择并用确认键2选定,将出现两个可能闪动的项目“输入”和“计划”。假如某个部分的维护警戒线超出设定,则“输入”闪动,假如维护时间超出计划的设定,则“计划”闪动
* 停下空压机,断开电源
* 一旦维护报警涉及到项目“输入”则需替换空气过滤器,上电,选择“状态数据”菜单到项目“输入”,按下“重置”键复位维护消息
第九章测量数据菜单
9.1功能
收集实际测量数据的信息以及一些输入输出状态的信息,比如电机过载保护状态信息。
9.2操作程序
从主屏幕开始(见主屏幕菜单)
* 按下F1“菜单”键
* 用下滚动键1移动直至水平箭头选中“测量数据”
* 通过确认键2激活
* 通过滚动键1和确认键2可以查看菜单中的各项,详细参数如下表
表三:测量数据参数项目
10.1功能
对以下项目进行计数
* 运行时间
* 加载时间
* 电机起动次数
* 控制器运行时间
* 加载继电器
10.2操作程序
从主屏幕开始(见主屏幕菜单)
* 按下F1“菜单”键
* 用下滚动键1移动直至水平箭头选中“计数器”
* 通过确认键2激活
* 通过滚动键1可以查看相应各项计数值,详细项目有以下五项运行时间/加载时间/电机起动次数/控制器运行时间/加载继电器
以下是显示了其中一部分计数数据的屏幕
11.1功能
进行显示屏测试,以便确信显示屏LED正常。
11.2操作程序
从主屏幕开始(见主屏幕菜单)
* 按下F1“菜单”键
* 用下滚动键1移动直至水平箭头选中“测试”
* 通过确认键2激活
* 项目“显示测试”被水平箭头
* 再次按下确认键2,测试期间,控制器屏幕上将会出现一系列的图样以便检测每一个像素是否仍然处于正常的工作状态,与此同时指示灯LED都将亮起
* 按下F1“菜单”键以返回子菜单
测试项目有三项:显示测试、安全阀测试、输出,目前控制器只激活显示测试。
第十二章修改参数菜单
12.1功能
修改下列可设定参数
* 运行参数
* 保护参数
* 保养计划设定
* 时钟功能设定
* 配置设定
12.2修改运行参数
12.2.1功能
修改运行参数数值,
12.2.2操作程序
从主屏幕开始(见主屏幕菜单)
* 按下F1“菜单”键
* 用下滚动键1移动直至水平箭头选中“修改参数”
* 通过确认键2激活菜单
* 第一项目“参数”被水平箭头选中
* 再次按下确认键2,第一项目组及它的设定项将出现
* 用下滚动键1移动直至水平箭头选中所要改的参数,若该项目是允许更改的话,在功能键3中 F2键所对应的屏幕显示出将出现“修改”
* 按下F2“修改”键将会根据不同的参数选项出现相应的修改屏幕,通过此时的功能键3中分别对应于F1, F2, F3键的“程序”, “限值”, “取消”进行操作。设定的数据都是有设定范围的,超出范围的设定值将不会被控制器接受,可通过F2“限值”键查看设定值允许的范围。
12.2.3修改加载压力设置点
假若需要的话,操作者可以设定两个压力范围段(加载/卸载压力和加载/卸载压力2)。
* 通过选项菜单“修改参数/ 参数”,选择“加载压力”.
* 屏幕显示当前设置.为修改这些设置,按下“修改”(F2)健,设置值将闪动。
* “限值”(F2)键可以被用于了解压力允许的设定范围。
* 用滚动键(1)改变设定值的数值。
* 按下“程序”(F1)键将新值存储,或者按下“取消”(F3)键放弃修改操作。
* 类似的按上边步骤修改其它压力数值。
允许修改的参数有
加载压力、卸载压力、加载压力2、卸载压力2、星形时间、加载延时、起动次数/天、最小停机时间、程序停机时间、本地通讯暂停
12.3修改保护参数
12.3.1功能
设定以下保护设置
* 停机保护
* 停机报警保护
* 报警保护
* 维护报警保护
有一些参数不能修改
12.3.2操作程序
从主屏幕开始(见主屏幕菜单)
* 按下F1“菜单”键
* 用下滚动键1移动直至水平箭头选中“修改参数”
* 通过确认键2激活菜单
* 用下滚动键1 移动直至“保护”被水平箭头选中
* 再次按下确认键2,它的设定项将出现
* 用下滚动键1移动直至水平箭头选中所要改的参数
* 通过功能键3进行修改
12.3.3修改空压机环境温度设定
从“修改参数/保护”屏幕开始
* 用下滚动键1移动直至水平箭头选中“主机1出口”
* 通过确认键2激活,将会出现类似于下图的屏幕画面
* 按下功能键3中的F2“修改”,可见设定值在闪烁
* 通过F2“限值”键可以查看该设定值的设定范围
* 用滚动键1改变设定值的数值
* 确定设定值没有错后,按下F1“程序”键保存
保护项目可修改的参数见表四。
表四:可修改的保护参数
12.4修改保养计划
12.4.1功能
修改保养标准的时间间隔
12.4.2保养计划
保养行动被事先规划成不同时间标准,每到达一个时间间隔,这一阶段的保养信息将出现在显示屏上。保养计划分成从A到J共10个等级,用户根据空压机的具体保养程序分别设定。
12.5时钟功能
12.5.1功能
显示日常时钟功能
12.5.2计划起动,停止以及压力段命令
在这个例子,空压机将按下面的规划的工作。
* 在星期一06:15分以压力段1起动。
* 在星期五18:00分改变为压力段2工作。
* 在星期六18:00分停止工作。
从主屏幕开始(见主屏幕菜单)
* 按下F1“菜单”键
* 用下滚动键1移动直至水平箭头选中“修改参数”
* 通过确认键2激活菜单
* 用下滚动键1 移动直至“时钟功能”被水平箭头选中
* 再次按下确认键2,它的设定项屏幕将出现在下面
* 按下确认键2, 下面的屏幕将出现
* 用滚动键(1)选择要求设定的星期, 按下确认键2, 下面的屏幕将出现
* 按下“修改”(F2)键, 最初的两个破折号将闪动。用滚动键(1)键入“06”。按下确认键2跳到接下来的两个破折号。用滚动键(1)键入“15”,按下确认键2跳到下一栏的破折号处,用滚动键(1)键入“启动”.
* 按下“程序”键存储命令“启动”。
* 按下滚动键,选择第二设定行。
* 类似的设定并存储命令“06:15 控制压力带1”。
* 按下“菜单”和选择到“星期五”.
* 类似的进行其他命令的设定。
12.5.3激活/解除定时器
* 假若程序中有至少一个起动/停止命令时,定时器可以被激活。
* 从主屏幕开始,按下“菜单”(F1)键。
* 用下滚动键(1)移动水平箭头以选中“修改参数”项。
* 按下确认键(2)激活菜单。
* 用下滚动键(1)移动水平箭头以选中“时钟功能”项,按下确认键(2),出现下面屏幕
* 按下“修改”键,“没激活”开始闪烁。
* 用下滚动键(1)将“没激活”改变为“激活”。
* 按下“程序”键存储。
12.5.4修改命令
为了更改星期六18:00停止空压机指令,例如用在星期六17:00停止空压机的指令代替原先指令。
* 从主屏幕开始,按下F1“菜单”键,用下滚动键(1)移动水平箭头以选中“修改参数”项。
* 按下确认键(2)激活菜单。
* 用下滚动键(1)移动水平箭头以选中“时钟功能”项,按下确认键(2),出现下面屏幕
* 按下确认键(2)激活菜单,出现下面屏幕。
* 用下滚动键(1)移动水平箭头以选中“星期六”项并按下确认键(2)。按下“修改”键,最初的两个破折号将闪动。通过滚动键修改。在这个例子中,将“18”改为“17”。
* 假若需要,按下确认键(2)跳到下一处修改的地方。则分钟、起动、停止、压力范围闪动指示。
* 按下“程序”键存储新的指令或者按下“取消”键放弃修改。
12.5.5在现有指令表结尾处增加指令
* 从主屏幕开始,按下F1“菜单”键,用下滚动键(1)移动水平箭头以选中“修改参数”项。
* 按下确认键(2)激活菜单。
* 用下滚动键(1)移动水平箭头以选中“时钟功能”项,按下确认键(2),出现下面屏幕
* 按下确认键(2)激活菜单,出现下面屏幕。
* 用下滚动键(1)移动水平箭头以选中需要修改的项目并按下确认键(2)。经过空压机起动/停止/压力段命令的切换后,水平键指示第一个空指令。
* 按下“修改”键,最初的两个破折号将闪动。通过滚动键键入“18:00 停止”并按确认键(2)跳到下一修改处
* 按下“程序”键存储新的指令或者按下“取消”键放弃修改。
12.5.6在现有的两行指令之间加入指令
假设将指令“17:00 压力带2”加入到下面的指令表中
“06:00 起动”
“06:00 压力带1”
“18:00 停止”
*滚动屏幕,通过水平键选择要加入指令的地方,(就本例而言在“18:00 停止”处),并且按下“修改”键。
*改变为新的指令。
*按下滚动键(1)并加入最后一个指令,按“Program”键存储。
12.5.7删除指令
* 从主屏幕开始,按下“菜单”(F1)键,用下滚动键(1)移动水平箭头以选中“修改参数”项。
* 按下确认键(2)激活菜单。
* 用下滚动键(1)移动水平箭头以选中“时钟功能”项,按下确认键(2),出现下面屏幕
删除所有指令
* 按下屏幕上的“删除”键,删除操作的确认提问将出现。
删除特殊一天所有指令
* 用下滚动键(1)移动水平箭头以选中要删除的某天的指令,按下屏幕上的“删除”键,删除操作的确认提问将出现。
删除特殊指令
* 用下滚动键(1)移动水平箭头以及确认键(2)以选中要删除的特殊指令,按下屏幕上的“删除”键,删除操作的确认提问将出现。
12.6系统配置设置
12.6.1功能
改变以下系统参数值
* 空压机控制模式参数
智能巡检仪 使用说明书 江苏中科仪表有限公司智能巡检仪
目 一、智能巡检仪表性能特点 (2) 二、技术指标 (2) 三、仪表参数设置 (5) 四、仪表接线方法 (13)
概述 本系列智能数字巡检仪表采用专用的集成仪表芯片,测量输入及变送输出采用数字校正及自校准技术,测量精确稳定,消除了温漂和时漂引起的测量误差。本系列仪表采用了表面贴装工艺,并设计了多重保护和隔离设计,并通过EMC电磁兼容性测试,抗干扰能力强、可靠性高,具有很高的性价比。 本系列智能数字巡检仪表具有多类型输入可编程功能,一台仪表可以配接不同的输入信号(热电偶/热电阻/线性电压/线性电流/线性电阻/频率等), 同时显示量程、报警控制等可由用户现场设置,可与各类传感器、变送器配合使用,实现对温度、压力、液位、容量、力等物理量的测量显示、调节、报警控制、数据采集和记录,其适用范围非常广泛。 智能数字显示仪表以双排四位LED显示测量值(PV)和通道值(CH),以双色发光管进行各个通道测量值报警显示,还具有零点和满度修正、冷端补偿、数字滤波、通讯接口、多种报警方式,可选配继电器报警输出,还可选配变送输出,或标准通讯接口(RS485或RS232C)输出等。
一、智能巡检仪性能特点 1、专用的集成仪表芯片,具备更为可靠的抗干扰性及稳定性。 2、万能信号输入,通过菜单设置即可配接常用热工信号。 3、可在线菜单修改显示量程、变送输出范围、报警值及报警方式。 4、软、硬件结合的抗干扰模式,有效抑制现场干扰信号。 5、数字化校准技术,无电位器等可调部件。 6、热电偶冷端温度及热电阻引线电阻自动补偿。 7、可分别设置每一通道的测量量程及上下限报警值。 8、具有快速巡检和定点监视功能,巡检时间可设。 9、通过来自输入、输出及电源端的电磁兼容(EMC)测试。 二、技术指标: 1、显示方式:双排四位LED显示测量值(PV)和通道号(CH)。 2、显示范围:-1999~9999。 3、测量准确度:±0.2%FS±1字或0.5%FS±1字;±0.1%FS±1字(需特殊订制)。 4、显示量程和分辨率:各通道可根据需要分别设置显示范围和小数点位数; 5、输入信号:
XXXXX配用电智能运维管理项目方案 在国家大力提倡“城镇智能化,园区智慧化”形势的推动下,随着新技术浪潮的再次革命,移动互联网和大数据技术处理、分析、运用的升级,必将诞生全新行业的专业运作模式。 陕西瑞诚电力运维服务有限公司正是本着科学化、标准化、精准化、服务化的理念,为客户量身打造安全、高效、经济的专业用电维保方案及优化服务方案。 针对“XXXXX”所具有的实际情况及特性用电场所,我们专门制定了比较完整的安全用电维护项目实施方案。 一、目的 1、根据国家权威部门数据统计分析,电气火灾已被列入全国第二大火灾灾 害事故原因,因此“安全用电,预防为主”是作为用电的最基本保障。 2、瑞诚公司本着“安全、科学、标准、高效、经济”的原则,为“XXXXX” 提供全方位的优质用电维保服务。 二、瑞诚公司具备的条件 1、瑞诚公司协同全国多家知名电力公司共同打造了“云联在线”平台—— 云联电力科技股份有限公司。作为数据采集、云计算分析、终端运行管 理的智能化运维支持平台。 2、获得了中华人民共和国国家版权局颁发的“计算机软件著作权登记证书”。 3、西北首家配电室托管运营维护服务的ISO9001质量管理体系认证。 4、具备建筑机电安装工程专业承包资质,输变电工程专业承包资质,城市 及道路照明工程专业资质,承装(修,试)电力设施许可证。
5、陕西省节能协会理事单位。 6、具有丰富的变配电室专业的标准化管理经验(均依据国家相关行业标准)。 7、专业的技术服务团队(每一位作业人员都具有电监会颁发认可的进网电 工作业资格证书)。 8、电力检修、维护保养、试验的专业仪器和检测设备。 9、我公司严格执行国家有关安全的标准和规范《电力建设安全健康与环境 管理工作规定》及《电力建设安全工作规程》等规章制度,确保现场安 全文明生产。 三、运维/维护的工作主要内容 设备检修维护是指对设备和系统进行必要的监视、维修和养护,通过日常的维护使设备保持良好的状态,确保设备安全、稳定、经济运行。它包含了对设备定期进行巡视检查、保持设备及场所的清洁、定期养(维)护设备、及时消除设备的各种缺陷、临时抢修、小型非标技改、治理设备“七漏”等检修工作。具体工作内容如下: 1、包含对系统设备的巡视、维护、保养工作,承担设备和系统的抢修、 更换设备、更换备品、配件等工作。 2、包含对设备、系统及区域内安全文明生产。 3、包含对设备的预防性试验工作。 4、做好设备巡检记录、设备检修台帐记录。 5、根据设备运行状况提出设备检修备品计划及材料计划。 6、设备消缺、消漏、抢修、小型非标技改。 7、备用设备的临修、事故性抢修。
纷享销客用户使用手册-管理员) 第二版 (
1 1
目录 创建企 业 (3) 邀请同 事 (4) 纷享管理后 台 (6) 部门与员 工 (7) 权限管 理 (11) 帐号安 全 (14) 应用管 理 (15) 企业设 置 (16)
外勤签到设置 (19) 考勤签到设置 (21) 报数系统后台管理 (23) 版本说明: 1 纷享销客用户使用手册版本:V4.7.0 日期:2015.11.19 版本更新: 文档版更新日更新概 新人V2.0 2015/11/19 王创建文档 学琳
纷享销客用户使用手册 创建企业企业第一个注册用户即为企业后台管理员,企业创建成功后,登录前往管理后台进行管理操作。 进入纷享销客官方网页,点击立即注册,进入注册流程,通过手机注册进入企业创建界面,填写企业名称,填写当前注册用户姓名和密码,点击创建。企业创建成功后,系统生成企业帐号方便登录。 纷享销客用户使用手册 邀请同事点击中部黄色指引系统指引会引导管理员前往邀请同事,管理员登录进入企业,条中的[邀请同事],弹出窗口提供给管理员两种邀请方式,一是通过手机号码或邮箱发送邀请,二是直接生成邀请链接复制黏贴给同事。.纷享销客用户使用手册
如果管理员没有通过引导方式邀请,也可在移动端设置-邀请同事,通过微信、短信、邮箱的方式调取本机的应用快速发出邀请。管理员可在此界面进行用户注册同事接受邀请并进行注册,提交信息给管理员,审核,审核通过的同事就正式加入当前企业,等待权限等其他设置。.纷享销客用户使用手册 纷享管理后台和应用,管理管理员登录进入企业后,网页导航栏包括功能模块:工作、CRM员还会拥有管理后台入口,点击[管理]进入管理后台,需要再次输入密码,确保后台管理的安全。企业信管理员可通过管理后台进行部门与员工维护、权限设置、账号安全管理、纷享提供用户分类管理员设定,公告管理、息维护、删除信息管理、日志统计等;不同权限的管理员分门别类的对各自模块继续维护和管理。.纷享销客用户使用手册
传感器的分类_传感器的原理与分类_传感器的定义和分类 传感器的分类方法很多.主要有如下几种: (1)按被测量分类,可分为力学量、光学量、磁学量、几何学量、运动学量、流速与流量、液面、热学量、化学量、生物量传感器等。这种分类有利于选择传感器、应用传感器 (2)按照工作原理分类,可分为电阻式、电容式、电感式,光电式,光栅式、热电式、压电式、红外、光纤、超声波、激光传感器等。这种分类有利于研究、设计传感器,有利于对传感器的工作原理进行阐述。 (3)按敏感材料不同分为半导体传感器、陶瓷传感器、石英传感器、光导纤推传感器、金属传感器、有机材料传感器、高分子材料传感器等。这种分类法可分出很多种类。 (4)按照传感器输出量的性质分为摸拟传感器、数字传感器。其中数字传感器便干与计算机联用,且坑干扰性较强,例如脉冲盘式角度数字传感器、光栅传感器等。传感器数字化是今后的发展趋势。 (5)按应用场合不同分为工业用,农用、军用、医用、科研用、环保用和家电用传感器等。若按具体便用场合,还可分为汽车用、船舰用、飞机用、宇宙飞船用、防灾用传感器等。 (6)根据使用目的的不同,又可分为计测用、监视用,位查用、诊断用,控制用和分析用传感器等。 主要特点传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化,它不仅促进了传统产业的改造和更新换代,而且还可能建立新型工业,从而成为21世纪新的经济增长点。微型化是建立在微电子机械系统(MEMS)技术基础上的,已成功应用在硅器件上做成硅压力传感器。 主要功能常将传感器的功能与人类5大感觉器官相比拟: 光敏传感器——视觉 声敏传感器——听觉 气敏传感器——嗅觉 化学传感器——味觉 压敏、温敏、传感器(图1) 流体传感器——触觉 敏感元件的分类: 物理类,基于力、热、光、电、磁和声等物理效应。 化学类,基于化学反应的原理。 生物类,基于酶、抗体、和激素等分子识别功能。 通常据其基本感知功能可分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类(还有人曾将敏感元件分46类)。 1)光纤传感器 光纤传感器技术是随着光导纤维实用化和光通信技术的发展而形成的一门崭新的技术。光纤传感器与传统的各类传感器相比有许多特点,如灵敏度高.抗电磁干扰能力强,耐腐蚀,绝缘性好,结构简单,体积小.耗电少,光路有可挠曲性,以及便于实现遥测等. 光纤传感器一般分为两大类,一类是利用光纤本身的某种敏感特性或功能制成的传感器.称为功能型传感器;另一类是光纤仅仅起传输光波的作用,必须在光纤端面或中间加装其他敏感元件才能构成传感器,称为传光型传感器。无论哪种传感器,其工作原理都是利用被测量的变化调制传输光光波的某一参数,使其随之变化,然后对已调制的光信号进行检测,从而得到被测量。
智能巡更巡检管理系统 操作 Document number:BGCG-0857-BTDO-0089-2022
前言 感谢您使用我们的“智能巡更巡检管理系统”。本手册适用于:智能巡更巡检管理系统系列。 郑重声明 未经本公司许可,本手册及软件的任何部分不得以任何方式复制或抄袭。 因使用不当引起的损失,本公司概不承担任何责任。为了您能正确地设置和使用本系统并得到最佳性能,保证长期使用,请必须仔细阅读本操作手册。 因技术发展,本公司保留未经通告而变更本手册、软件及硬件产品性能指标的权利。 使用时请注意爱护产品,这是延长其寿命的最好方法。 系统特点 软件是一款简单、实用的巡更巡检管理系统,仅需设置地点、人员或计划(可选)便可使用,而且使用过程中数据的分析、存贮、备份都由软件自动完成。软件所需的售后服务量极少,因此又称“零售后服务软件”。 智能巡检计划 对巡检线路即可设置计划,也可不设置计划,都可以分析出巡检结果。 灵活设置人员、事件
如果要掌握巡检人员情况,可为每个人员配备电子标签(卡式),在软件中进行相应的设置即可,在巡检前先读人员卡,再去巡检,系统自动识别,此项为可选设置(无计划模式为必选项)。 系统也同样支持事件,事件可由两种方法实现:一种是在巡检器上选择(事件代码),另一种是使用事件卡,事件处理由软件自动分析识别。 免维护 自动完成数据月备份、周备份和即时备份,自动清除过期数据。
快速上手指南 初次使用本软件,可按如下步骤进行设置: 1.巡检地点管理中进行线路和地点设置; 2.如果巡检过程需要进行人员身份识别应设置巡检人员,为每班组或个人设 置人员卡;如采用无计划模式必需设置人员卡。 3.(可选设置)如巡检过程需要记录事件,请设置巡检事件,事件支持编码 方式和事件卡方式; 4.制定巡检计划。注可为巡检线路设置巡检计划。(可选设置) 5.在系统参数中,正确设置巡检器通讯所用的端口。 6.读取巡检数据时请正确选择所使用的巡检器型号。读取数据后软件会自动 保存并分析数据; 7.初次使用时,如不能查询巡检结果,请使用菜单中巡检数据->重新分析功 能,此功能仅对设置了巡检计划的线路有效。 电子标签安装流程 第一步:划分巡检线路 确定被巡检范围需要设置几条巡检线路,每条线路应安装多少个点 例如:需要设置2条线路A线和B线,A线路45个电子标签,B线路35个电子标签。在“资源管理”菜单中点击“巡检地点管理”功能 模块中,点击左下角的“增加”按钮,即可增加巡检线路。 第二步:手工编号 把不同线路的电子标签分开,贴上不干胶标签,并标上序号,如 1、2、3……,并且不要打乱已编完序号电子标签的顺序。
智能机器人巡检系统在500kV变电站的应用 发表时间:2019-07-16T15:37:22.293Z 来源:《电力设备》2019年第6期作者:侯彦农 [导读] 摘要:研发了一套变电站机器人智能巡检系统,从机器人本体、充电系统、无线传输系统、本地监控后台和环境适应性等方面介绍了巡检系统设计方案和各组成部分的关键技术。 (国网山西检修公司) 摘要:研发了一套变电站机器人智能巡检系统,从机器人本体、充电系统、无线传输系统、本地监控后台和环境适应性等方面介绍了巡检系统设计方案和各组成部分的关键技术。从现场勘查、设备安装、巡检规划和巡检应用等方面介绍了工程实施步骤和在电网220kV、 500kV变电站的实际应用情况。分析了机器人巡检调试过程中存在的行进时出轨、无线通信不稳定、表计读取不准确、行走转弯卡涩等问题,并提出了解决措施。该巡检系统具有部署快速、适应性强、采集数据准确、定位精度高、超声防撞等显著优点,各项性能指标均满足变电站智能巡检需求,具有良好的推广应用前景。 关键词:变电站;机器人;巡检系统;设计;智能巡检;工程实施;问题分析 500kV变电站在电能传输中有着极其重要的地位,变电站 传统巡视方式是运维人员依据巡视计划,依赖综合感官,并借助一些检测仪器及巡检经验对变电设备运行状况进行以简单定性判断,该方式具有劳动强度大、主观因素多、发现问题隐患滞后等不足。随着国家电网超高压及特高压系统的不断发展,变电站值班方式正在由有人值守向少人、无人值守方式发展,智能机器人巡检系统定将成为新的发展方向。智能机器人巡检系统在冀北电网500kV变电站处于试运行阶段。本文首先对智能机器人巡检系统的设计与功能进行分析,在此基础上着重对智能机器人的运维管理及常见问题的处理办法进行论述,最后阐述了智能机器人巡检系统验收过程中的注意事项。 1机器人巡检系统总体设计 1.1充电系统 充电房由充电柜、充电座、无线通信设备和自动卷帘门组成。充电柜和充电座用于机器人自动对接充电,无线通信设备选用与本地监控后台相同的无线网桥和天线,天线安装在充电房的顶部。机器人工作状态分为巡检、充电、空闲等3种。收到巡检命令后,机器人检查电池电量是否充足,充足即进入巡检状态,开始执行巡检任务,否则拒绝执行并报警。巡检完成后,机器人返回充电房。机器人在巡检中实时检测电池电量,如果电量不足则返回充电房充电,充电过程完全自动化。 1.2巡检系统组成 机器人巡检系统由机器人本体、充电系统、无线传输系统、本体监控后台及辅助设施组成。系统具有以下特点:(1)使用无轨导航方式,实现快速部署,可方便站间调配;(2)采用四轮独立驱动,适应于各种复杂环境,提供高清晰度红外及可见光视频图像,测温精度达0.5℃;(3)采用基于激光雷达和惯导组合的精确地形匹配的导航方案,定位精度达到1cm;(4)超声防撞,提供高可靠性安全保障,可原地全方位运动,为巡检提供更强的易用性。 1.3无线传输系统 机器人通过无线网桥与本地监控后台实现双向、实时信息交互。信息交互内容包括机器人本体状态和被检测设备图像、语音和指示性数据。机器人采用5.8GHz频段高质量等级的室外专用数字无线网桥,实现长距离多路视频、音频以及数据的实时传输,最长传输距离达10km,数传误码率≤10-6,数传时延≤20ms,图传时延≤300ms,由于此频段的无线网桥无需申请无线执照,比其他有线网络设备更方便部署。机器人通过无线网桥接收监控后台的控制指令,进行云台转动、设备检测、车体运动和自动充电,并检测机器人状态和各类预警、告警信息并进行上报。在通信中断、接收的报文内容异常等情况下,图像、语音、数据不丢失,同时系统将发出告警信息,并在通信恢复后自动续传。(1)实时监控模块负责查看机器人运行过程中的图像信息、车体状态信息、车体行进信息、电池状态信息、巡检现场气象信息、巡检任务信息等。(2)任务规划模块分为例行、特巡任务规划和遥控巡检3种模式,可随时进行任务模式的切换。根据变电站巡检需求,例行任务规划可提前生成若干巡检任务,每天定期巡检;特巡任务规划可实时生成临时巡检任务,执行特殊巡检任务。(3)远程遥控模块可以实时遥控机器人到规定地点做规定动作。该模块可通过手柄控制云台方位和俯仰,控制车体速度和方向。(4)配置中心模块包括设备配置、地图配置和基本配置3个子界面。设备配置界面包括红外配置、可见光配置、车体配置和云台配置。(5)历史查询和数据分析模块可实现可见光图像、红外图像、声音及表计读数、设备位置状态、注油设备油位等信息的存储、诊断和查询。 1.4环境适应性 机器人按照全国各地区变电站极端环境气候设计,针对暴风大雨、湿热、高海拔、寒冷等恶劣气候条件,变电站强电场、强磁场环境,通过“三防”设计、防风设计、电磁兼容性、抗震设计以及温度适应性等设计,确保机器人在不同气候条件下长期可靠、安全稳定运行。机器人电子元器件,电源、通信等模块采用屏蔽、隔离处理,关键信号通过阻抗匹配设计、各设备模块采用等电势共地设计,输入输出接口的滤波和保护设计等技术确保各模块的信号完整性、安全和可靠性。 2智能机器人在500kV变电站的具体应用 2.1安全管控 智能巡检机器人,可应用于500kV变电站的安全管控工作中。因为智能巡检机器人具备视频录制等功能,所以,在安全管理工作中,可通过“开始录制”功能的设置,让智能巡检机器人借助电子鼻和烟感装置对变电站工作现场烟雾、火灾等现象进行识别、录制,并将画面及时传给监控中心,提醒监控中心工作人员对安全事故问题进行处理,避免事故的蔓延威胁到人们生命安全。此外,因为智能巡检机器人具备语音对讲功能。所以,在500kV变电站巡检工作中,若发现了违规问题,可借助语音操作对违规行为加以制止,第一时间遏制违规现象所带来的安全危机。 2.2指令操作 智能机器人在500kV变电站运行环境中的应用,也提供了一系列查询操作功能,其主要体现在以下几个方面:第一,巡检数据查询功能。即在500kV变电站日常巡检工作开展过程中,可点击智能巡检机器人系统中的“巡检数据”按钮,通过这一按钮的点击,可进入到“查询”功能。但若查数据显示中包含了一些红色数据,则表示500kV变电站运行环境存在着温升越界危机,应对问题进行及时解决;第二,报表查询功能。即在500kV变电站实际巡检过程中,若想了解与变电站设备运行相关的数据,可点击“分析/报表查询”按钮,通过这一按钮的点
将压力转换为电信号输出的传感器。通常把压力测量仪表中的电测式仪表称为压力传感器。压力传感器一般由弹性敏感元件和位移敏感元件(或应变计)组成。弹性敏感元件的作用是使被测压力作用于某个面积上并转换为位移或应变,然后由位移敏感元件(见位移传感器)或应变计(见电阻应变计、半导体应变计)转换为与压力成一定关系的电信号。有时把这两种元件的功能集于一体,如压阻式传感器中的固态压力传感器。压力是生产过程和航天、航空、国防工业中的重要过程参数,不仅需要对它进行快速动态测量,而且还要将测量结果作数字化显示和记录。大型炼油厂、化工厂、发电厂和钢铁厂等的自动化还需要将压力参数远距离传送(见遥测),并要求把压力和其他参数,如温度、流量、粘度等一起转换为数字信号送入计算机。因此压力传感器是极受重视和发展迅速的一种传感器。压力传感器的发展趋势是进一步提高动态响应速度、精度和可靠性以及实现数字化和智能化等。常用压力传感器有电容式压力传感器、变磁阻式压力传感器(见变磁阻式传感器、差动变压器式压力传感器)、霍耳式压力传感器、光纤式压力传感器(见光纤传感器)、谐振式压力传感器等。 传感器的基本知识 一、传感器的定义 国家标准GB7665-87对传感器下的定义是:“能感受规定的被测量并按照一定的规律转换成可用信号的器件或装置,通常由敏感元件和转换元件组成”。传感器是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。 二、传感器的分类 目前对传感器尚无一个统一的分类方法,但比较常用的有如下三种: 1、按传感器的物理量分类,可分为位移、力、速度、温度、流量、气体成份等传感器 2、按传感器工作原理分类,可分为电阻、电容、电感、电压、霍尔、光电、光栅、热电偶等传感器。 3、按传感器输出信号的性质分类,可分为:输出为开关量(“1”和"0”或“开”和“关”)的开关型传感器;输出为模拟型传感器;输出为脉冲或代码的数字型传感器。 关于传感器的分类: 1.按被测物理量分:如:力,压力,位移,温度,角度传感器等; 2.按照传感器的工作原理分:如:应变式传感器、压电式传感器、压阻式传感器、电感式传感器、电容式传感器、光电式传感器等; 3.按照传感器转换能量的方式分: (1)能量转换型:如:压电式、热电偶、光电式传感器等; (2)能量控制型:如:电阻式、电感式、霍尔式等传感器以及热敏电阻、光敏电阻、湿敏电阻等; 4.按照传感器工作机理分: (1)结构型:如:电感式、电容式传感器等; (2)物性型:如:压电式、光电式、各种半导体式传感器等; 5.按照传感器输出信号的形式分: (1)模拟式:传感器输出为模拟电压量; (2)数字式:传感器输出为数字量,如:编码器式传感器。 三、传感器的静态特性 传感器的静态特性是指对静态的输入信号,传感器的输出量与输入量之间所具有相互关系。因为这时输入量和输出量都和时间无关,所以它们之间的关系,即传感器的静态特性可用一个不含时间变量的代数方
《智能巡逻06管理系统》使用说明书 1、系统简介 电子巡逻巡检系统是监督考核巡逻人员工作情况的智能管理系统,由感应式智能巡逻管理系统软件、巡检器和各种射频卡构成。其基本的原理就是在巡逻线路上安装一系列代表不同地点的射频卡(又称感应卡),巡逻到各点时巡逻人员用手持式巡检器(相当于刷卡机)读卡,把代表该点的“卡号”和“读卡时间”同时记录下来。巡逻完成后巡检器通过通讯线把数据传给计算机软件处理,就可以对巡逻情况(地点、时间等)进行记录和考核。 《智能巡逻06管理系统》06版本是一个综合性软件,此软件可以适用于我公司生产BP -2002、BP-2002B、BP-2002V、BP-2002S、BP-2002W巡检器及BS-1000通讯座、BS -2000数据采集器、BS-3000短信通讯座、BS-4000及BS-4000m通讯座。同时也能使用BS-1000t的通讯座。 1.1、如何安装系统 执行程序“感应式智能巡逻管理系统”,根据安装提示向导完成。 在安装过程中,系统会提示是否安装USB驱动,点击“Install”完成USB安装。 图1:驱动安装提示图 操作系统要求:win2000,winXP,或更高版本的windows系统。 计算机硬件要求:主频1.5G以上、内存128M以上、硬盘5G以上,带光驱,至少一个USB接口。建议使用计算机的配置要高于以上要求。 1.2、巡检点的安装 巡检点的安装:巡检点卡为标准的ID卡,每一张卡都有全球唯一的16进制卡号,每张卡的卡号代表一个检查点,一般埋入墙内防破坏,深度小于5毫米左右,管型卡安装比较方便。具体安装方法请参考光盘附带的《巡检点安装说明》。
机器视觉和巡检机器人在智能化电力设备故障检测中的应用 汇报人:李金屏济南大学 吴文俊人工智能科学技术进步奖二等奖 完成单位: 济南大学 山东鲁能智能技术有限公司
2吴文俊人工智能科学技术奖 目 录 1项目基本情况 3研究背景 4开发思路 5具体方法 6创新点 7实现效果 8相关成果 2项目简介
1 第一部分 项目基本情况
1 项目基本情况 项目名称:基于巡检机器人的特殊地域设备故障和实时报警的智能视频监测系统Intelligent Real Time Equipment Breakdown Video Monitoring System based on Patrol Robot 主题词:视频监控;巡检机器人;电力系统;设备故障监测 主要完成单位:济南大学;山东鲁能智能技术有限公司 任务来源:国网山东省电力公司电力科学研究院,基于视频的巡检机器人导航及仪表设备识别研究(企业合作项目);济南市高校自主创新计划,面向视频监控的事件检测与行为分析系统(编号7NK1005) 项目起止时间:2007.01 - 2010.12 4吴文俊人工智能科学技术奖
2 第二部分 项目简介
2 项目简介 本项目利用巡检机器人,基于信息化技术进行电力设备故障监控,提高监控效率和减少事故率。 主要内容:利用巡检机器人及其所携带的可见光和热成像摄像头开展针对电力设备的智能化设备监控研究。要点是:在现有的视频监控系统基础上,通过建立巡检机器人在各个停靠点的各种典型情况下的图像数据库,在人工标定各个设备的前提下,只利用图像配准技术,通过对前端摄像头采集的可见光和热成像视频流信息进行实时监视和分析,就可以进行视野内各种相关设备的准确定位和温度异常检测,从而实现设备的远距离状态监控。 项目所属的科学技术领域:电力系统信息化与自动化技术。 6吴文俊人工智能科学技术奖
关于纷享逍客的使用规定3.0 一、日志(每日工作计划) 1、总部:总部人员每日下班前应填写工作日志,填写内容为当日的主要工作内容及完成情况、第二天的工作计划内容,发送时间不得迟于当天24:00,逾期发送乐捐人民币20元/次。 2、营销部:各项目经理应于当天将工作总结及次日工作计划发送至“企信项目组”,逾期发送乐捐人民币20元/次。 二、周计划 1、填写人员:各项目经理 2、填写时间:每周日下班前填写完毕,发送时间不得迟于当天24:00,逾期发送乐捐人民币50元/次。 3、填写格式:填写本周主要工作内容及完成情况及下周的工作计划内容,工作内容要求客观详实,条理清楚。周表报统计时间为周一至周日,原“销售周报表”及“销控表”以附件形式添加并发送。 4、抄送范围:余总、林总、营销总监、项目策划、行政点评人:营销总监 三、月计划 1、填写人员:各项目经理 2、填写时间:每月初填写完毕,发送时间不得迟于5日24:00,逾期发送乐捐人民币50元/次。 3、填写格式:填写本月主要工作内容及完成情况及下月的工作计划内容,工作内容要求客观详实,条理清楚。月表报统计时间为1-31日,原“销售月报表”、“绩效考核”及“销控表”以附件形式添加并发送。 4、抄送范围:余总、林总、营销总监、项目策划、行政点评人:营销总监 四、案场会议记录 1、各项目经理应组织销售人员召开早会/晚会,并将早会视频发送至微信“阳光项目管理群”及晚会会议记录拍照发送至“纷享逍客企信的营销经理群”;经理休息或开会需交待其他人员主持早会,未完成视为经理监督不到位。 2、发送时间:早会视频在9:30前发送,全体上班成员均应参加,特殊情况未参加且未报备说明原因的个人及经理各乐捐50元/次,晚会记录应在当天 24:00前发送,逾期发送经理乐捐50元/次。 五、请假审批 1、所有人员请假需按照格式填写请假的起止时间及请假事由。 2、总部人员请假:抄送范围为总部,第一审批人为其直属上级,超过天数者第一审批人审批后应再次提交上一级审批人。 3、销售人员请假:抄送范围为“行政部”+"所在项目",请假时间1天内审批人为“项目经理”,超过1天者,由项目经理审批后需再次提交“营销总监”审批; 4、项目经理请假:抄送范围为“行政部”+"所在项目",审批人为“营销总监”,并由营销总监视具体情况决定是否需要提交上级审批。 5、请假必须提前1天填写《请假条》,获得批准后方可休假。未经批准视为无效请假,擅自休假的视为旷工。
智能巡检管理系统V3.5.7软件使用说明书 服务源于诚信品质源于专业
目录 第一章软件安装 (2) 1.1 软件运行环境要求 (2) 1.2 如何安装软件系统 (2) 1.3 如何卸载软件 (2) 1.4 系统登录 (3) 第二章基础信息 (4) 2.1 设置巡检线路 (4) 2.2 设置巡检地点 (5) 2.3 巡检线路与地点绑定 (8) 2.4 设置巡检人员 (10) 2.5 设置巡检器号码 (10) 2.6 巡检计划排班设置 (11) 第三章数据处理 (14) 3.1 读取巡检器数据 (14) 2.2 巡检情况查询 (15) 3.3 原始记录查询 (16) 3.4 合格率统计 (17) 3.5 重新分析数据 (17) 第四章系统维护 (18) 4.1 巡检器设置 (18) 4.2 数据库初始化 (19) 4.3 恢复数据 (19) 4.4 清理巡检数据 (20) 第五章可能遇到的问题和解决方法 (21) 5.1 软件安装完成后找不到巡检器,无法上传数据 (21) 5.2 USB驱动已正确安装,还是无法上传数据 (24) 5.3 原来可以上传数据,软件系统突然读不了数据了 (25)
第一章软件安装 1.1 软件运行环境要求 计算机硬件推荐配置:当前主流兼容机均可满足要求。建议CPU:P4 1.7G以上,内存:512M,硬盘空间:10G以上。 WINDOWS操作系统平台,推荐采用WINDOWS XP/2000操作系统。 1.2 如何安装软件系统 运行软件光盘中的智能巡检管理系统V3.5.7.EXE文件,依据提示完成安装。 应用程序安装结束时请选择Install安装USB 驱动程序,如果省略此安装步骤,系统将无法读取巡检器数据。 1.3 如何卸载软件 在系统“开始”—“程序”—“智能巡检管理系统V3.5.7”中选择“卸载智能巡检管理系统V3.5.7”即可。 建议您只使用上述方法卸载本软件,其它方法可能造成系统运行故障。
电力智能巡检机器人研究综述 摘要:电力智能巡检机器人搭载高清可见光相机,红外热成像仪、拾音设备等 智能化检测装置以及智能分析算法软件,完成全天候数据快速采集、实时信息传输、智能分析预警到快速决策反馈的管控闭环,从而代替人工巡检实现电力设备 状态的自动检测和智能分析,提高了电网和电力设备运行的可靠性。使用电力智 能巡检机器人是电网智能化得以实现的重要手段,是智能电网未来发展的重要方向。文中针对目前国内外研究现状和不足,分别从电力智能巡检机器人的主要技术、前沿科技、功能定位及标准体系等方面展开讨论,对电力智能巡检机器人研 究现状进行了综述性探讨。 关键词:电力智能;巡检;机器人 引言 伴随经济发展和人民生活水平的提高,社会用电量不断提升,对电网运行稳 定性提出更高挑战,变电、输电、配电等电力系统各环节的巡检需求进一步提高。目前电力公司仍主要采用传统的人工巡检方式,即利用看、听、闻等感知手段, 对电力设备运行状态进行查验和记录,此种方式存在着人力成本高、巡检手段单一、巡检数据主观性强、受天气影响大、数据管理分散等问题,逐渐无法满足准确、实时、高频率的电力设备巡检需求。我国目前正从劳动密集型向现代化制造 业方向发展,振兴制造业、实现工业化是我国经济发展的重要任务。从工业发展 历程看,生产手段必然要经历机械化、自动化、智能化、信息化的变革。随着国 民经济的快速发展以及生产技术的不断进步和劳动力成本的不断上升,使用机械、自动化技术代替人力成为巡检管理的必然趋势。 1电力智能巡检机器人国内外市场总体情况分析 1.1国内市场情况 按2015年国家电网和南方电网的规划,未来5年,原有枢纽及中心变电站 智能化改造率将达100%,有约两万座110kV及以上的传统变电站将要进行智能 化改造,同时新建智能化变电站数量达到1.5万座。根据国家电网的统计,2016 年底应用于国网35kV及以上变电站的智能巡检机器人数量共计893台,这一数 量远未达到市场饱和的程度。2017至2020年间,仅考虑此3.5万座智能变电站 中有15%-20%需配置智能巡检机器人,运行模式以一机三站为例,单套机器人系 统价格约为100万元,则未来三年中变电站机器人将有17.5亿元-23.3亿元的市 场容量。中长期来看,我国的变电站巡检机器人潜在市场规模接近123.3亿元。 具有较大的市场空间。室内机器人主要应用于开关站内。根据统计,一般一个地 级市配电站数量从500座至5,000座不等,直辖市、省会城市、经济发达城市数 量较多。根据各地区用电量不同及电网建设情况不同,按平均每个地级市1,000 座配电站估计,全国297个地级以上城市(含4个直辖市)大约拥有配电站30 万座。另根据国家能源局公布的《配电网建设改造行动计划(2015-2020年)》,我国将会加速发展智能电网的建设,预计对于电力智能巡检机器人的需求超过5 万台。 1.2国外市场情况 此外,国内电力企业积极参与国际合作与“走出去”战略。随着智能电网建设 的全面铺开,各类人工智能设备的需求潜力不断增长,智能巡检机器人也由此迎 来了发展提速期。除了在国内市场获得快速发展外,随着我国电力企业海外业务 拓展和中东欧等国加快智能电网建设,随着“一带一路”“中国制造2025”等国家战
压力传感器的分类及应用原理 教程来源:网络作者:未知点击:28 更新时间:2009-2-16 10:11:30 压力传感器是工业实践中最为常用的一种传感器,其广泛应用于各种工业自控环境,涉及水利水电、铁路交通、智能建筑、生产自控、航空航天、军工、石化、油井、电力、船舶、机床、管道等众多行业,下面就简单介绍一些常用传感器原理及其应用 1、应变片压力传感器原理与应用 力学传感器的种类繁多,如电阻应变片压力传感器、半导体应变片压力传感器、压阻式压力传感器、电感式压力传感器、电容式压力传感器、谐振式压力传感器及电容式加速度传感器等。但应用最为广泛的是压阻式压力传感器,它具有极低的价格和较高的精度以及较好的线性特性。下面我们主要介绍这类传感器。 在了解压阻式力传感器时,我们首先认识一下电阻应变片这种元件。电阻应变片是一种将被测件上的应变变化转换成为一种电信号的敏感器件。它是压阻式应变传感器的主要组成部分之一。电阻应变片应用最多的是金属电阻应变片和半导体应变片两种。金属电阻应变片又有丝状应变片和金属箔状应变片两种。通常是将应变片通过特殊的粘和剂紧密的粘合在产生力学应变基体上,当基体受力发生应力变化时,电阻应变片也一起产生形变,使应变片的阻值发生改变,从而使加在电阻上的电压发生变化。这种应变片在受力时产生的阻值变化通常较小,一般这种应变片都组成应变电桥,并通过后续的仪表放大器进行放大,再传输给处理电路(通常是A/D转换和CPU)显示或执行机构。 金属电阻应变片的内部结构 如图1所示,是电阻应变片的结构示意图,它由基体材料、金属应变丝或应变箔、绝缘保护片和引出线等部分组成。根据不同的用途,电阻应变片的阻值可以由设计者设计,但电阻的取值范围应注意:阻值太小,所需的驱动电流太大,同时应变片的发热致使本身的温度过高,不同的环境中使用,使应变片的阻值变化太大,输出零点漂移明显,调零电路过于复杂。而电阻太大,阻抗太高,抗外界的电磁干扰能力较差。一般均为几十欧至几十千欧左右。 电阻应变片的工作原理 金属电阻应变片的工作原理是吸附在基体材料上应变电阻随机械形变而产生阻值变化的现象,俗称为电阻应变效应。金属导体的电阻值可用下式表示: 式中:ρ——金属导体的电阻率(Ω·cm2/m) S——导体的截面积(cm2) L——导体的长度(m) 我们以金属丝应变电阻为例,当金属丝受外力作用时,其长度和截面积都会发生变化,从上式中可很容易看出,其电阻值即会发生改变,假如金属丝受外力作用而伸长时,其长度增加,而截面积减少,电阻值便会增大。当金属丝受外力作用而压缩时,长度减小而截面增加,电阻值则会减小。只要测出加在电阻的变化(通常是测量电阻两端的电压),即可获得应变金属丝的应变情2、陶瓷压力传感器原理及应用 抗腐蚀的陶瓷压力传感器没有液体的传递,压力直接作用在陶瓷膜片的前表面,使膜片产生微小的形变,厚膜电阻印刷在陶瓷膜片的背面,连接成一个惠斯通电桥(闭桥),由于压敏电阻的压阻效应,使电桥产生一个与压力成正比的高度线性、与激励电压也成正比的电压信号,标准的信号根据压力量程的不同标定为2.0 / 3.0 / 3.3 mV/V等,可以和应变式传感器相兼容。通过激光标定,传感器具有很高的温度稳定性和时间稳定性,传感器自带温度补偿0~70℃,并可以和绝大多数介质直接接触。 陶瓷是一种公认的高弹性、抗腐蚀、抗磨损、抗冲击和振动的材料。陶瓷的热稳定特性及它的厚膜电阻可以使它的工作温度范围高达-40~135℃,而且具有测量的高精度、高稳定性。电气绝缘程度>2kV,输出信号强,长期稳定性好。高特性,低价格的陶瓷传感器将是压力传感器的发展方向,在欧美国家有全面替代其它类型传感器的趋势,在中国也越来越多的用户使用陶瓷传感器替代扩散硅压力传感器。 3、扩散硅压力传感器原理及应用 工作原理 被测介质的压力直接作用于传感器的膜片上(不锈钢或陶瓷),使膜片产生与介质压力成正比的微位移,使传感器的电阻值发生变化,和用电子线路检测这一变化,并转换输出一个对应于这一
传感器分类 传感器有许多分类方法,但常用的分类方法有两种,一种是按被测物理量来分;另一种是按传感器的工作原理来分。 按被测物理量划分的传感器,常见的有:温度传感器、湿度传感器、压力传感器、位移传感器、流量传感器、液位传感器、力传感器、加速度传感器、转矩传感器等。 按工作原理可划分为: 1.电学式传感器 电学式传感器是非电量电测技术中应用范围较广的一种传感器,常用的有电阻式传感器、电容式传感器、电感式传感器、磁电式传感器及电涡流式传感器等。 电阻式传感器是利用变阻器将被测非电量转换为电阻信号的原理制成。电阻式传感器一般有电位器式、触点变阻式、电阻应变片式及压阻式传感器等。电阻式传感器主要用于位移、压力、力、应变、力矩、气流流速、液位和液体流量等参数的测量。 电容式传感器是利用改变电容的几何尺寸或改变介质的性质和含量,从而使电容量发生变化的原理制成。主要用于压力、位移、液位、厚度、水分含量等参数的测量。 电感式传感器是利用改变磁路几何尺寸、磁体位置来改变电感或互感的电感量或压磁效应原理制成的。主要用于位移、压力、力、振动、加速度等参数的测量。 磁电式传感器是利用电磁感应原理,把被测非电量转换成电量制成。主要用于流量、转速和位移等参数的测量。 电涡流式传感器是利用金屑在磁场中运动切割磁力线,在金属内形成涡流的原理制成。主要用于位移及厚度等参数的测量。
2.磁学式传感器 磁学式传感器是利用铁磁物质的一些物理效应而制成的,主要用于位移、转矩等参数的测量。 3.光电式传感器 光电式传感器在非电量电测及自动控制技术中占有重要的地位。它是利用光电器件的光电效应和光学原理制成的,主要用于光强、光通量、位移、浓度等参数的测量。 4.电势型传感器 电势型传感器是利用热电效应、光电效应、霍尔效应等原理制成,主要用于温度、磁通、电流、速度、光强、热辐射等参数的测量。 5.电荷传感器 电荷传感器是利用压电效应原理制成的,主要用于力及加速度的测量。 6.半导体传感器 半导体传感器是利用半导体的压阻效应、内光电效应、磁电效应、半导体与气体接触产生物质变化等原理制成,主要用于温度、湿度、压力、加速度、磁场和有害气体的测量。 7.谐振式传感器 谐振式传感器是利用改变电或机械的固有参数来改变谐振频率的原理制成,主要用来测量压力。 8.电化学式传感器 电化学式传感器是以离子导电为基础制成,根据其电特性的形成不同,电化学传感器可分为电位式传感器、电导式传感器、电量式传感器、极谱式传感器和电解式传感器等。电化学式传感器主要用于分析气体、液体或溶于液体的固体成分、液体的酸碱度、电导率及氧化还原电位等参数的测量。
1. Summary YK-19 series intelligent Channels Measurement instrument is intelligent, high accuracy controller for temperature, pressure or level measurement. When use it to equipped with temperature, pressure or level sensor, we can consist temperature, pressure or level measurement control system for various type and range. provide RS232 or RS485 to communication with computer or PLC。The instrument has a real-time clock for user get date and time。 2.T echnical specifications Input signal: Resistance temperature Detector Pt100, Cu50, Cu100,3 wires conncet Measurement accuracy : 0.2%FS±1 digit Alarm Output: buzzer communication: isolation RS485, baud 1200~9600bps。 transmit: isolation 4-20mA for the first channel,<250Ω Display : double 4 digit LED display. Power suply: 220V AC. Power c onsumption: 2W Temperature: 0~50℃ Ambient humidity: <85%RH Front panel dimension : 160mm×80mm Installation dimension : 152mm×76mm 3. Operation Key-press Description Press the KEY to mute the Buzzer. at setting parameters state, press the key return to work state. At work state, press the key to switch cycle display and static display. While at cycle display state,the bottom LED are display –xx-, at static display 。 Press the SET key to enter setting status.,After chang the current parameter at setting parameters state, press ▲key making parameter increase one. and hold the ▲key, value will increase or decrease quickly and release for stop. At static display state, press ▲key will change to next channels value display. at setting parameters state, press▼key making parameter decrease one. and hold the ▼key, value wil decrease quickly and release for stop. At static display state, press the key will change to next channels value display.