1
单排双级行星轮运动特性方程式的推演
李书江
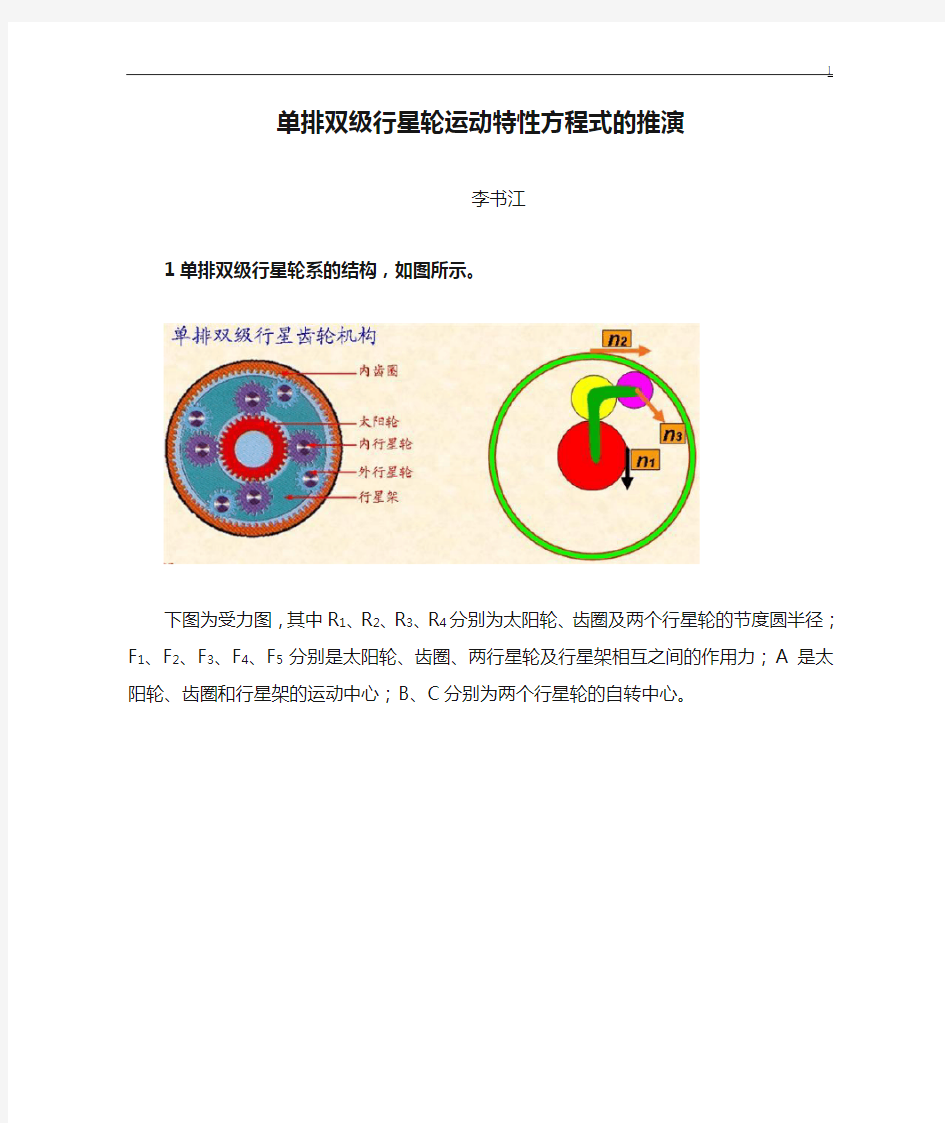
1单排双级行星轮系的结构,如图所示。
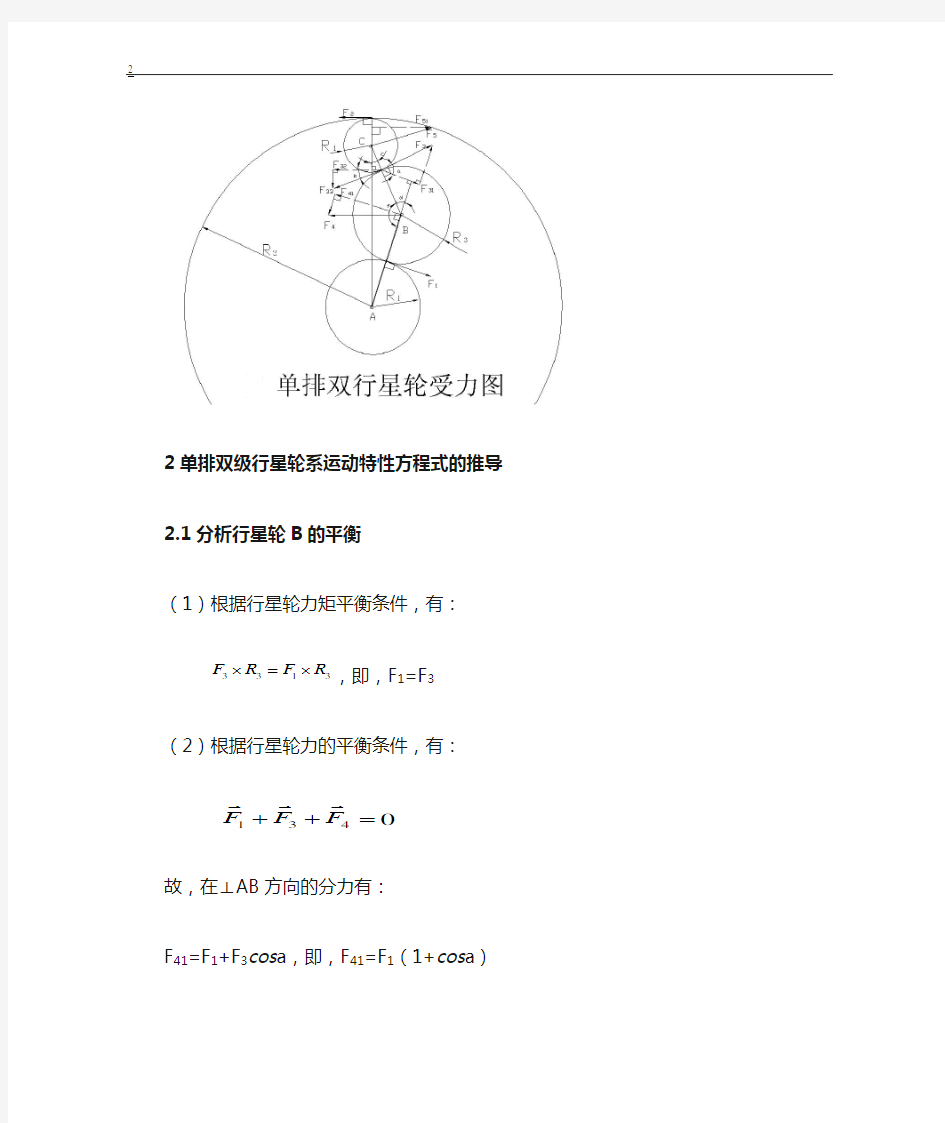
下图为受力图,其中R 1、R 2、R 3、R 4分别为太阳轮、齿圈及两个行星轮的节度圆半径;F 1、F 2、F 3、F 4、F 5分别是太阳轮、齿圈、两行星轮及行星架相互之间的作用力;A 是太阳轮、齿圈和行星架的运动中心;B 、C 分别为两个行星轮的自转中心。
2单排双级行星轮系运动特性方程式的推导
2.1分析行星轮B 的平衡
(1)根据行星轮力矩平衡条件,有:
3133R F R F ?=?,即,F 1=F 3
(2)根据行星轮力的平衡条件,有:
0431=++F F F
故,在⊥AB 方向的分力有:
2 F 41=F 1+F 3cos a ,即,F 41=F 1(1+cos a )
2.2分析行星轮C 的平衡
(1)根据行星轮力矩平衡条件,有:
43342R F R F ?=?,即,F 2=F 33
由于,F 1=F 3,F 33=F 3(作用力与反作用力) 故,
F 2= F 1 ,F 33= F 1
(2)根据行星轮力的平衡条件,有: 03352=++F F F
故,在⊥AC 方向的分力有:
F 51=F 2+F 33cos b ,即,F 51= F 1(1+cos b )
2.3 求解三元件转矩
令三元件中太阳轮、齿圈及行星架的转矩分别为M 1、M 2、M 3,则:
M 1=F 1×R 1 ;
M 2 = -F 2×R 2= -F 1×R 2 ;
M 3= F 51(R 2-R 4) -F 41(R 1+R 3)
= F 1(1+cos b )(R 2-R 4)-F 1(1+cos a )(R 1+R 3)
2.4有关尺寸关系
(1)由图.2不难看出,
∠b=∠c ;∠a=∠d=180°-∠f
(2)在三角形△ABC 中,根据余弦定理得:
)
)(()()()(cos cos 4243231242243R R R R R R R R R R c b -++--++== ))(()()()(cos )180cos(cos 31432
43231242R R R R R R R R R R f
f a o +++-+--=-=-=
2.5功率守恒
根据能量守恒定律,太阳轮、行星架及齿圈三元件的输入和输出功率相等,即三者功率代数和为零,即:
M 1×n 1+M 2×n 2+M 3×n 3=0
式中n 1、n 2、n 3分别为太阳轮、齿圈、行星架
转动角速度。将2.2.3的M 1、M 2、M 3以及2.2.4中的cosa 、cosb 代入上式,整理得:
n 1×R 1+ n 3×(R 2﹣R 1) = n 2×R 2-------(1)
3单排双级行星轮系运动特性应用式
3.1齿轮传递关系
由齿轮传递原理可知,模数相同的齿轮才能配对使用。因此,单排行星轮系相啮合各齿轮的模数均相同。若太阳轮和齿圈的齿数分别为Z 1、Z 2,那么:
2 R 1 = m ×Z 1 2 R 2 = m ×Z 2
3.2运动特性方程应用式
将3.1中的两式代入(1),得出单排双级行星轮系运动特性应用式:
n 1 Z 1+ n 3( Z 2 -Z 1)= n 2 Z 2
3
行星齿轮机构和工作原理
§3-3 行星齿轮机构和工作原理 Ⅰ授课思路:在初步了解行星齿轮机构的组成的基础上,通过单排行星齿轮机构一般运动规律的特性方程结合力和反作用力的作用原理使学生掌握单排行星齿轮的工作原理。拓展学生的能力,使学生概括出单排行星齿轮的基本特征。Ⅱ过程设计: 1.提问问题,复习上次课内容(约3min) ⑴导轮单向离合器有哪几种?(楔块式、滚柱式) ⑵锁止离合器的作用?(提高传动效率,使液力变矩器有液力传动变为机械 传动) 2.导入新课(约1min) 自动变速器是怎样实现自动换挡的呢?这就是我们这节课讲的主要内容3.新课内容:具体内容见“授课内容”(约73min) 4.本次课内容小结(约2min) 5.布置作业(约1min) Ⅲ讲解要点:单排行星齿轮的工作原理和单排行星齿轮的基本特征这一主线进行讲解。 Ⅳ授课内容: 一、简单的行星齿轮机构的特点 行星齿轮机构的组成: 简单(单排)的行星齿轮机构是变速机构 的基础,通常自动变速器的变速机构都由两排 或三排以上行星齿轮机构组成。简单行星齿轮
机构包括一个太阳轮、若干个行星齿轮和一个齿轮圈,其中行星齿轮由行星架的固定轴支承,允许行星轮在支承轴上转动。行星齿轮和相邻的太阳轮、齿圈总是处于常啮合状态,通常都采用斜齿轮以提高工作的平稳性(如图l所示)。 如图2表示了简单行星齿轮机构,位于行星齿轮机构中心的是太阳轮,太阳轮和行星轮常啮合,两个外齿轮啮合旋转方向相反。正如太阳位于太阳系的中心一样,太阳轮也因其位置而得名。行星轮除了可以绕行星架支承轴旋转外,在有些工况下,还会在行星架的带动下,围绕太阳轮的中心轴线旋转,这就像地球的自转和绕着太阳的公转一样,当出现这种 情况时,就称为行星齿轮机构作用的传动 方式。在整个行星齿轮机构中,如行星轮 的自转存在,而行星架则固定不动,这种 方式类似平行轴式的传动称为定轴传动。 齿圈是内齿轮,它和行星轮常啮合,是内 齿和外齿轮啮合,两者间旋转方向相同。 行星齿轮的个数取决于变速器的设计负 荷,通常有三个或四个,个数愈多承担负 荷愈大。 简单的行星齿轮机构通常称为三构件机构,三个构件分别指太阳轮、行星架和齿圈。这三构件如果要确定相互间的运动关系,一般情况下首先需要固定其中的一个构件,然后确定谁是主动件,并确定主动件的转速和旋转方向,结果被动件的转速、旋转方向就确定了。 二、单排行星齿轮机构的工作原理 根据能量守恒定律,三个元件上输入和输出的功率的代数和应等于零,从而得到单排行星齿轮机构一般运动规律的特性方程。 特性方程:n1+an2-(1+a)n3=0 n1——太阳轮转速,n2——齿圈转速,n3——行星架转速,a——齿圈与太阳轮齿数比。 由特性方程可以看出,由于单排行星齿轮机构具有两个自由度,在太阳轮、环形
行星传动传动比及啮合频率计算 特征频率主要包含转频和啮合频率,根据传动比计算的结果,可以相应的算出每个齿轮相对应的转速n ,则转频60i i f n =,齿轮啮合频率等于该齿轮的转频乘以它的齿数。相互啮合的两个齿轮的啮合频率是相等的。即zi i i f f z =?。而齿轮的振动谱就是以该基频(zi f )波和高次谐波所组成的谱,因此在故障诊断中具有重大意义。又因为相互啮合的两个齿轮的啮合频率是相等的,所以一组行星轮系当中只要计算中心论转速即可。 1 a 1 b 1 c 2 a 2 b 2 c Input Shaft Output Shaft 2 d 1 d 3 d 4 d 齿轮模型 齿轮箱各级齿轮参数 参数 行星齿轮箱 平行轴齿轮箱 一级 二级 高速级 低速级 a 1 b 1 c 1 a 2 b 2 c 2 d 1 d 2 d 3 d 4 模数 1 1 1 1 1 1 1.5 1.5 1.5 1.5 齿数 20 40 100 28 36 100 29 100 90 36 个数 1 3 1 1 4 1 1 1 1 1
n –输入转速; Za1–第一级太阳轮齿数;Zb1 –第一级行星轮齿数;Zc1–第一级内齿圈齿数; Za2 –第二级太阳轮齿数;Zb2 –第二级行星轮齿数;Zc2 –第二级内齿圈齿数; (1) 一级行星轮系: 111111a H c c H a n n z n n z -=-- 其中,n n n a c ==11,0 ,则 )1//(11111+==a c a H b z z n n n =n 6 1 (2) 二级行星轮系: 222 222 a H c c H a n n z n n z -=--其中, 1 22,0H a c n n n ==,则 )1//(22222+==a c a H b z z n n n =232 7 a n 行星轮系级: 传动比i =192/7 (3)平行轴: 中间低速级: 传动比i1= 小 大 n n =100/29 高速级: 传动比i2= 小 大 n n =2.5 平行轴传动比:i=8.6 总传动比:i=232 齿轮箱振动特征频率 1. 啮合频率: 1)转速同步频率 n f = n/60 式中,n 为轴转速(转/分)。 2)定轴齿轮啮合频率 n f = nz/60 式中,n 为轴转速(转/分), r z 为齿轮齿数。 3)行星轮系,啮合频率用下式计算: m f = a b a c b z f f z f ?-=?)( 式中,b n 为行星轮架转速(转/分),c z 为内 齿圈齿数,a f 为太阳轮转频,a z 为太阳轮齿数。 m f =(15.95-1.975)*13=181.675 m f =1.975*92=181.7
行星齿轮传动比计算 在《机械设计》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错, 其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比, 其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这 几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a cb a bc i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子:
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴 传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传 动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1 )1(11133 1311H H H H i i i i -===这样就把行星传动的计算转换为定轴传动了,所以将齿数代 入公式得出1H i =10000 最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。
行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。 【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T的机构
1 2 3 4 差动轮系:2个运动 行星轮系:, 对于行量轮系: ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动 H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==03=W 13 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==0=B W AH H A H H A H AB i W W W W W i -=-=--= 110H AB AH i i -=1
行星齿轮传动比计算 在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a cb a bc i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子:
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴 传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1 )1(11133 1311H H H H i i i i -===这样就把行星传动的计算转换为定轴传动了,所以将齿数代 入公式得出1H i =10000 最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。 注: H ab i =±所有从动轮齿数的连乘积所有主动轮齿数的连乘积 ( 正负号不表示周转轮系中a 轮和b 轮的实际转向关系,而表示转化轮系中a 轮和b 轮的转向关系。转向相同取正,相反取负。 不能省略正负号,此处正负号关系着传动比的计算数值!)
第四章行星的运动 一、行星的视运动及其解释 1 内行星的视运动及其解释 相对于地球轨道,轨道半径小的水星和金星称为“(地)内行星” 轨道半径大的火星、木星、土星、天王星和海王星称为“(地)外行星” 内行星常在黎明前出现于东方(“晨星”),或在黄昏后出现于西方(“昏星”) 内行星与太阳的角距离总是在一定范围内变化 行星相对于恒星背景的移动,其路径在黄道附近 2 内行星视运动分类 由于内行星和地球在各自轨道上绕太阳公转,内行星的公转速度比地球的快,且它们的轨道面有一定的夹角,因此,从地球上观测到内行星相对于恒星的视运动呈现出(上合前后)向东“顺行”、(下合前后)向西“逆行”,以及顺逆转折时的“留”,视运动路径呈折圈形状。顺行:自西向东运行,与地球公转方向相同,顺行时间长 逆行:自东向西运行,与地球公转方向相反,逆行时间短 留:由顺行转逆行或由逆行转顺行的转折点 3 内行星视运动的特殊点 合:当行星与太阳的黄经相等时称为“合”,行星在太阳前方称为下合,太阳在行星前方称为上合 大距:当行星与太阳角距达到最大时称为“大距”,在太阳之东称为“东大距”,在太阳之西称为“西大距” 内行星视运动的运行周期:上合(1)——(顺行)——东大距——(顺行)——留——(逆行)——下合——(逆行)——留——(顺行)——西大距——(顺行)——上合(2) 4 凌日 在下合时,若内行星又恰好过黄道面,地球上的观测者可以看到它从太阳圆面前经过,日面上出现一个移动的小黑点,这一现象称为“凌日” 内行星凌日发生的必要条件:内行星和地球都位于轨道交点附近 怎样安全地观察凌日现象? 不能在没有保护措施的情况下通过普通望远镜和天文望远镜观看太阳 接物镜滤片:将一块高质量的滤片放在普通望远镜或天文望远镜的物镜上。 白屏投影:距离望远镜或天文望远镜一定距离放置一块白色屏幕,让光线照在白屏上 5 外行星的视运动及其解释 外行星的轨道大于地球轨道,其视运动除了有顺行、逆行、留和折圈路径等跟内行星视运动相似特征外,还有一些自己的特征:只有“上合”,没有“下合”;与太阳的角距没有“大距”限制;没有“凌日);没有明显的相位变化 冲日:外行星与太阳的地心黄经相差180°时,称为“冲日”或“冲” 大冲:由于行星轨道都是椭圆,因此每次冲时,外行星与地球的距离都不相同,距离最小的冲称为“大冲” 方照:外行星与太阳的地心黄经相差90°时,称为“方照”。 行星在太阳之东称为“东方照”,行星中午升起,日落时位于中天附近,上半夜可见于西方天空 行星在太阳之西为“西方照”,行星子夜升起,日出时位于中天附近,下半夜可见于东方天空 外行星视运动的运行周期:合(1)——(顺行)——东方照——(顺行)——留——(逆行)——冲——(逆行)——留——(顺行)——西方照——(顺行)——合(2) 6 行星的会合周期 地球上观测到的行星运动实际上是行星公转和地球公转的复合运动,常称为“会合运动”。地球上观测到行星的连续两次上合或冲的时间间隔,称为“会合周期” 会合周期等不等行星的公转周期?不等于。公转周期应该为相对于遥远恒星背景来计量公转一圈的时间间隔——“恒星周期” 思考 地内行星和地外行星的视运动有哪些不同之处? 二、行星的轨道根数和星历表 1 轨道根数 长半轴a: 轨道椭圆长轴的一半,表示轨道大小 偏心率e : 对于椭圆轨道0 行星齿轮机构和工作原理 一、 简单的行星齿轮机构的特点 行星齿轮机构的组成: 简单(单排)的行星齿轮机构是变速机构 的基础,通常自动变速器的变速机构都由两排 或三排以上行星齿轮机构组成。简单行星齿轮 机构包括一个太阳轮、若干个行星齿轮和一个 齿轮圈,其中行星齿轮由行星架的固定轴支 承,允许行星轮在支承轴上转动。行星齿轮和 相邻的太阳轮、齿圈总是处于常啮合状态,通 常都采用斜齿轮以提高工作的平稳性(如图l 所示)。 如图2表示了简单行星齿轮机构,位于行星齿轮机构中心的是太阳轮,太阳轮和行星轮常啮合,两个外齿轮啮合旋转方向相反。正如太阳位于太阳系的中心一样,太阳轮也因其位置而得名。行星轮除了可以绕行星架支承轴旋转外,在有些工况下,还会在行星架的带动下,围绕太阳轮的中心轴线旋转,这就像地球的自转和绕着太阳的公转一样,当出现这种 情况时,就称为行星齿轮机构作用的传动 方式。在整个行星齿轮机构中,如行星轮 的自转存在,而行星架则固定不动,这种 方式类似平行轴式的传动称为定轴传动。 齿圈是内齿轮,它和行星轮常啮合,是内 齿和外齿轮啮合,两者间旋转方向相同。 行星齿轮的个数取决于变速器的设计负 荷,通常有三个或四个,个数愈多承担负 荷愈大。 简单的行星齿轮机构通常称为三构件机构,三个构件分别指太阳轮、行星架和齿圈。这三构件如果要确定相互间的运动关系,一般情况下首先需要固定 其中的一个构件,然后确定谁是主动件,并确定主动件的转速和旋转方向,结 果被动件的转速、旋转方向就确定了。 二、 单排行星齿轮机构的工作原理 根据能量守恒定律,三个元件上输入和输出的功率的代数和应等于零,从而得到单排行星齿轮机构一般运动规律的特性方程。 特性方程:n1+an2-(1+a)n3=0 n1——太阳轮转速,n2——齿圈转速,n3——行星架转速,a——齿圈与太阳轮齿数比。 由特性方程可以看出,由于单排行星齿轮机构具有两个自由度,在太阳轮、环形内齿圈和行星架三个机构中,任选两个分别作为主动件和从动件,而使另一个元件固定不动,或使其运动受一定的约束(即该元件的转速为某定值),则机构只有一个自由度,整个轮系以一定的传动比传递动力。下面分别讨论三种情况。 1、齿圈固定,太阳轮为主动件且顺时针转动,而行星架则为被动件。太阳轮顺时针转动时,太阳轮轮齿必给行星轮齿A一个推力F 1 ,则行星轮应为逆时针 转动,但由于齿圈固定,所以齿圈轮齿必给行星轮齿B一个反作用力F 2 ,行星轮 在F 1和 F 2 合力作用下必绕太阳轮顺时针旋转,结果行星轮不仅存在逆时针自 转,并且在行星架的带动下,绕太阳轮中心轴线顺时针公转。在这种状态下,就出现了行星齿轮机构作用的传动方式,而且被动件行星架的旋转方向与主动件同方向。在这里,太阳轮是主动件而且是小齿轮,被动件行星架没有具体齿数的传动关系,因此定义行星架的当量齿数等于太阳轮和齿圈齿数之和。这样,太阳轮带动行星架转动仍属于小齿轮带动最大的齿轮,是一种减速运动且有最大的传动比。因为此时n2=0,故传动比 i13=n1?n3=1+a。(如图3) 【最新整理,下载后即可编辑】 行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 2 3 4 差动轮系:2个运动 行星轮系:, H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==03=W 1 3 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--== 对于行量轮系: ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1 =100,Z 2 =101,Z 2' =100, Z 3 =99。求:输入件H对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H行星架 给整个机构(-W H )绕OO轴转动 = B W AH H A H H A H AB i W W W W W i- = - = - - =1 1 H AB AH i i- =1 2 1 3 2 2 3 1 13 )1 ( ' ? ? ? - = - - = Z Z Z Z W W W W i H H H 实用文案 行星的轨道和位置的数学解法 作者:石磊a,林川 b 指导教师:乐经良 C 教授 a : 上海交通大学电子信息与电气工程学院F0303032 班 (5030309885) , 电话: 54740807 b : 上海交通大学电子信息与电气工程学院F0303032 班 (5030309880) , 电话: 54741769 c : 上海交通大学理学院数学系 摘要:本文主要涉及常微分方程及对微分方程的建模与求解,数值积分的计算;利用多种微 分方程的数值方法求解得到行星运行的参数和位置。研究基于压缩映象的求根方法和微 分方程的 Runge-Kutte 法。特别对 Runge-Kutte 法进行较深入的讨论。并通过数值方法解微分 方程得到的行星位置演示水星和冥王星的运行轨道,编制软件。 关键词:微分方程数值方法Runge–Kutte法 问题的重述 17 世纪初,在丹麦天文学家 T.Brache 观察工作的基础上, Kepler 提出了震惊当时科学界的 行星运行三大定律: 1.行星运行的轨道是以太阳为一个焦点的椭圆; 2.从太阳指向某一行星的线段在单位时间内扫过的面积相等; 3.行星运行周期的平方与其运行轨道椭圆长轴的立方之比值是不随行星而改变的常数。 对这三条定律的分析和研究导致 Newton 发现了著名的万有引力定律,而同时,应用万有 引力定律, Kepler 的行星运行三大定律得到了理论上的推导。 数学模型 设太阳中心所在位置为复平面之原点O,在时刻t ,行星位于 Z (t ) re i(4.1)所表示的点P。这里r r (t),(t ) 均是t的函数,分别表示Z (t ) 的模和辐角。 于是行星的速度为 dZ dr e i ire i d e i dr ir d dt dt dt dt dt 其加速度为 行星齿轮传动比分析与计算 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 2 3 4 差动轮系:2个运动 行星轮系: , 对于行量轮系: H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==0 3=W 1 3 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==0=B W ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动 ∵W 3=0 ∴ ∴ 若Z 1=99 行星轮系传动比是计算出来的,而不是判断出来的。 AH H A H H A H A B i W W W W W i -=-=--= 110H AB AH i i -=1213 223113)1(' ???-=--= Z Z Z Z W W W W i H H H H H H i Z Z Z Z W W W 13 213210' =--H H i Z Z Z Z W W 13 21321 1'=+- H H i i 13 1100100991011??- =10000 1001009910111 111=??- = = H H i i 1001-=H i 行星的轨道和位置的数学解法 作者:石磊a ,林川b 指导教师:乐经良C 教授 a : 上海交通大学电子信息与电气工程学院F0303032班(5030309885) , 电话:54740807 b : 上海交通大学电子信息与电气工程学院F0303032班(5030309880) , 电话:54741769 c : 上海交通大学理学院数学系 摘要:本文主要涉及常微分方程及对微分方程的建模与求解,数值积分的计算;利用多种微分方程的数值方法求解得到行星运行的参数和位置。研究基于压缩映象的求根方法和微分方程的Runge-Kutte 法。特别对Runge-Kutte 法进行较深入的讨论。并通过数值方法解微分方程得到的行星位置演示水星和冥王星的运行轨道,编制软件。 关键词:微分方程 数值方法 Runge – Kutte 法 问题的重述 17世纪初,在丹麦天文学家T.Brache 观察工作的基础上,Kepler 提出了震惊当时科学界的行星运行三大定律: 1. 行星运行的轨道是以太阳为一个焦点的椭圆; 2. 从太阳指向某一行星的线段在单位时间内扫过的面积相等; 3. 行星运行周期的平方与其运行轨道椭圆长轴的立方之比值是不随行星而改变的常数。 对这三条定律的分析和研究导致Newton 发现了著名的万有引力定律,而同时,应用万有引力定律,Kepler 的行星运行三大定律得到了理论上的推导。 数学模型 设太阳中心所在位置为复平面之原点O ,在时刻t ,行星位于 θi re t Z =)( (4.1) 所表示的点P 。这里)(),(t t r r θθ==均是t 的函数,分别表示)(t Z 的模和辐角。 于是行星的速度为 ?? ? ??+=+=dt d ir dt dr e dt d ire e dt dr dt dZ i i i θθθθθ 其加速度为 1 单排双级行星轮运动特性方程式的推演 李书江 1单排双级行星轮系的结构,如图所示。 下图为受力图,其中R 1、R 2、R 3、R 4分别为太阳轮、齿圈及两个行星轮的节度圆半径;F 1、F 2、F 3、F 4、F 5分别是太阳轮、齿圈、两行星轮及行星架相互之间的作用力;A 是太阳轮、齿圈和行星架的运动中心;B 、C 分别为两个行星轮的自转中心。 2单排双级行星轮系运动特性方程式的推导 2.1分析行星轮B 的平衡 (1)根据行星轮力矩平衡条件,有: 3133R F R F ?=?,即,F 1=F 3 (2)根据行星轮力的平衡条件,有: 0431=++F F F 故,在⊥AB 方向的分力有: 2 F 41=F 1+F 3cos a ,即,F 41=F 1(1+cos a ) 2.2分析行星轮C 的平衡 (1)根据行星轮力矩平衡条件,有: 43342R F R F ?=?,即,F 2=F 33 由于,F 1=F 3,F 33=F 3(作用力与反作用力) 故, F 2= F 1 ,F 33= F 1 (2)根据行星轮力的平衡条件,有: 03352=++F F F 故,在⊥AC 方向的分力有: F 51=F 2+F 33cos b ,即,F 51= F 1(1+cos b ) 2.3 求解三元件转矩 令三元件中太阳轮、齿圈及行星架的转矩分别为M 1、M 2、M 3,则: M 1=F 1×R 1 ; M 2 = -F 2×R 2= -F 1×R 2 ; M 3= F 51(R 2-R 4) -F 41(R 1+R 3) = F 1(1+cos b )(R 2-R 4)-F 1(1+cos a )(R 1+R 3) 2.4有关尺寸关系 (1)由图.2不难看出, ∠b=∠c ;∠a=∠d=180°-∠f (2)在三角形△ABC 中,根据余弦定理得: ) )(()()()(cos cos 4243231242243R R R R R R R R R R c b -++--++== ))(()()()(cos )180cos(cos 31432 43231242R R R R R R R R R R f f a o +++-+--=-=-= 2.5功率守恒 根据能量守恒定律,太阳轮、行星架及齿圈三元件的输入和输出功率相等,即三者功率代数和为零,即: M 1×n 1+M 2×n 2+M 3×n 3=0 式中n 1、n 2、n 3分别为太阳轮、齿圈、行星架 转动角速度。将2.2.3的M 1、M 2、M 3以及2.2.4中的cosa 、cosb 代入上式,整理得: n 1×R 1+ n 3×(R 2﹣R 1) = n 2×R 2-------(1) 3单排双级行星轮系运动特性应用式 3.1齿轮传递关系 由齿轮传递原理可知,模数相同的齿轮才能配对使用。因此,单排行星轮系相啮合各齿轮的模数均相同。若太阳轮和齿圈的齿数分别为Z 1、Z 2,那么: 2 R 1 = m ×Z 1 2 R 2 = m ×Z 2 3.2运动特性方程应用式 将3.1中的两式代入(1),得出单排双级行星轮系运动特性应用式: n 1 Z 1+ n 3( Z 2 -Z 1)= n 2 Z 2 第八章 轮系及其传动比计算 第四十八讲齿轮系及其分类 如图8—1所示,由一系列齿轮相互啮合而组成的传动系统简称轮系。根据轮系中各齿轮运动形式的不同,轮系分类如下: ? ? ? ? ? ?? ? ? ? ? ? ? ? = = ? ? ? 成 由几个周转轮系组合而 和周转轮系混合而成或 混合轮系:由定轴轮系 ) 行星轮系( ) 差动轮系( 周转轮系(轴有公转) 空间定轴轮系 平面定轴轮系 定轴轮系(轴线固定) 轮系 1 2 F F 图8—1 图8—2 图8—3 定轴轮系中所有齿轮的轴线全部固定,若所 有齿轮的轴线全部在同一平面或相互平行的平 面内,则称为平面定轴轮系,如图8—1所示, 若所有齿轮的轴线并不全部在同一平面或相互 平行的平面内,则称为空间定轴轮系;若轮系 中有一个或几个齿轮轴线的位置并不固定,而 是绕着其它齿轮的固定轴线回转,如图8—2,8 —3所示,则这种轮系称为周转轮系,其中绕着 固定轴线回转的这种齿轮称为中心轮(或太阳 轮),即绕自身轴线回转又绕着其它齿轮的固定 轴线回转的齿轮称为行星轮,支撑行星轮的构图8—4 件称为系杆(或转臂或行星架),在周转轮系中,一般都以中心轮或系杆作为运动的输入或输出构件,常称其为周转轮系的基本构件;周转轮系还可按其所具有的自由度数目作进一步的划分;若周转轮系的自由度为2,则称其为差动轮系如图8—2所示,为了确定这种轮系的运动,须给定两个构件以独立运动规律,若周转轮系的自由度为1,如图8—3所示,则称其为行星轮系,为了确定这种轮系的运动,只须给定轮系中一个构件以独立运动规律即可;在各种实际机械中所用的轮系,往往既包含定轴轮系部分,又包含周转轮系部分,或者由几部分周转轮系组成,这种复杂的轮系称为复合轮系如图8—4所示,该复合轮系可分为左边的周转轮系和右边的定轴轮系两部分。 在太阳系中,天体行星的运行轨道都是椭圆的,这一点早已被科学观察所证实。但为什么行星的运动轨迹都会是椭圆的呢?几个世纪来,牛顿给出了计算椭圆轨道的公式,康德在其《宇宙发展史概论》中作出了一个不很明确的解答“行星的偏心率是自然界因力图使行星作圆周运动时,由于中间出现了许多情况,而不能完全达到圆形的结果”。而拉普拉斯在其《宇宙体系论》中是这样解释的“如果行星只受太阳的作用,它们围绕太阳运行的轨道是椭圆的……。”20世纪的爱因斯坦也只告诉我们“空间是弯曲的”,现代科学对于行星椭圆轨道形成的原因。如同“万有引力”一样,尚是一个未揭开的科学之迷。 天体行星的运动,不但轨道是椭圆的,而且运动的公转速度与自转速度也随着时空的变化而变化,显现出某些特殊的运动规律。这些规律,至今为止,人们尚未真正解开其中的奥秘。近年来,俄罗斯科学家,运用数学和控制论科研所的研究员提出“由于地球内部的固体核旋转速度快于地慢,从而影响了地球的自转速度”。有关专家指出“该科研成果解决了地球自转角速度发生变化的原因,解决了多年来困扰学术界的一个难题。” 天体行星运动轨道的变化规律,是因地球内部固体核与地慢流的运动差异而引起的变化吗?本人运用量子引力理论进行了诸多的推演,创新了一套天体行星运动系统的引力控制理论,它能全面地解释天体行星椭圆轨道的形成和运动速度变化的原因。该理论发现:太阳系行星运动的规律直接受银河系中心引力场引力控制,从而产生出太阳系轨道行星运动的自然法规。 18世纪法国大科学家拉普拉斯,在其所著的《宇宙体系论》中指出:“行星系里,除了使行星围绕太阳在椭圆轨道上运行的主要原因外,还存在其他特殊扰乱它们的运动,而且长时期里改变他们的轨道根数”。引自《宇宙体系论·第四章·行星围绕太阳运动的规律及其轨道的形状》(法)皮埃尔·西蒙·拉普拉斯著。 银河系中心引力场究竟怎样控制太阳系里的行星运动呢?拉普拉斯所预言的“还存在其它特殊原因”,而这个特殊原因就是“银河系引力的控制”。但拉普拉斯说“如果行星只受太阳的作用,它围绕太阳运行的轨道是椭圆的”,这句话从理论推演上说反了。实际上行星在围绕着太阳运行时,在不受银河系引力场控制的前提下,行星的运行轨道是正圆的而不是椭圆的。在后文的推演中,我们将会使读者真正认识到银河系中心引力场对太阳系的引力控制,对于运动行星来说是无法摆脱且真实地存在。 行星齿轮机构运动规律原理及应用分析 类型:转载来源:济民工贸的博客作者:齐兵责任编辑:李笛发布时间:2009年06月11日 我们熟知的齿轮绝大部分都是转动轴线固定的齿轮。例如机械式钟表、普通机械式变速箱、减速器,上面所有的齿轮尽管都在做转动,但是它们的转动中心(与圆心位置重合)往往通过轴承安装在机壳上,因此,它们的转动轴都是相对机壳固定的,因而也被称为"定轴齿轮"。 有定必有动,对应地,有一类不那么为人熟知的称为"行星齿轮"的齿轮,它们的转动轴线是不固定的,而是安装在一个可以转动的支架(蓝色)上(图中黑色部分是壳体,黄色表示轴承)。行星齿轮(绿色)除了能象定轴齿轮那样围绕着自己的转动轴(B-B)转动之外,它们的转动轴还随着蓝色的支架(称为行星架)绕其它齿轮的轴线(A-A)转动。绕自己轴线的转动称为"自转",绕其它齿轮轴线的转动称为"公转",就象太阳系中的行星那样,因此得名。 也如太阳系一样,成为行星齿轮公转中心的那些轴线固定的齿轮被称为"太阳轮",如图中红色的齿轮。在一个行星齿轮上、或者在两个互相固连的行星齿轮上通常有两个啮合点,分别与两个太阳轮发生关系。如右图中,灰色的内齿轮轴线与红色的外齿轮轴线重合,也是太阳轮。 轴线固定的齿轮传动原理很简单,在一对互相啮合的齿轮中,有一个齿轮作为主动轮,动力从它那里传入,另一个齿轮作为从动轮,动力从它往外输出。也有的齿轮仅作为中转站,一边与主动轮啮合,另一边与从动轮啮合,动力从它那里通过。 在包含行星齿轮的齿轮系统中,情形就不同了。由于存在行星架,也就是说,可以有三条转动轴允许动力输入/输出,还可以用离合器或制动器之类的手段,在需要的时候限制其中一条轴的转动,剩下两条轴进行传动,这样一来,互相啮合的齿轮之间的关系就可以有多种组合: 单排行星齿轮机构的结构组成为例 ● (1)行星齿轮机构运动规律 设太阳轮、齿圈和行星架的转速分别为n1、n2和n3,齿数分别为Z1、Z2、Z3;齿圈与太阳轮的齿数比为α。则根据能量守恒定律,由作用在该机构各元件上的力矩和结构参数可导出表示单排行星齿轮机构一般运动规律的特性方程式: n1+αn2-(1+α)n3=0和Z1+Z2=Z3 ●(2)行星齿轮机构各种运动情况分析 由上式可看出,由于单排行星齿轮机构具有两个自由度,在太阳轮、齿圈和行星架这三个基本构件中,任选两个分别作为主动件和从动件,而使另一元件固定不动(即使该元件转速为0),或使其运动受一定的约束(即该元件的转速为某定值),则机构只有一个自由度,整个轮系以一定的传动比传递动力。下面分别讨论各种情况。 行星齿轮机构各种运动情况分析 固定件主动件从动件转速成转向 太阳轮行星架齿圈增速同向 太阳轮齿圈行星架减速同向 齿圈行星架太阳轮增速同向 齿圈太阳轮行星架减速同向 行星架齿圈太阳轮增速反向 行星架太阳轮齿圈减速反向 问题15 小行星的轨迹问题 一 、问题 一天文学家要确定一颗小行星绕太阳运行的轨道,他在轨道 平面内建立以太阳为远点的直角坐标系,在两坐标轴上取天文测量单位(一天文单位为地球到太阳的平均距离:1.4959787*10^11m ),在5个不同的时间对小行星作了5次观察,测得轨道上5个点的坐标数据如表2.15.1. 表2.15.1 由开普勒第一定律知,小行星轨道为一椭圆,现需要建立椭圆的方程以供研究。(注:椭圆的一般方程可表示为 012225423221=+++++y a x a y a xy a x a )。 二、实验目的 利用5个点确定二次曲线的一般方程,并求出椭圆的重要参数。 三、预备知识 线性代数方程组理论,椭圆的有关概念及性质。 四、实验内容与要求 1.用表中5个点的坐标数据分别代入椭圆的一般方程可建立5 个方程的线性代数方程组,该方程组的系数矩阵为A ,右端项为b ,这里, 21x 112y x 21y 12x 12y -1 22x 222y x 2 2y 22x 22y -1 A= 23 x 332y x 23y 32x 32y b= -1 2 4x 442y x 24y 42x 42y -1 25x 552y x 2 5y 52x 52y -1 试依据题目所给的5个点的坐标,用计算机计算出矩阵的A 的5*5个数据。 2.利用Matalb 指令A\b 求解5元线性代数方程组,写出椭圆 方程 012225423221=+++++y a x a y a xy a x a 中的 5个待定系数 5 4321,,,,a a a a a 及小行星多所对应的曲 线方程。 3.写出曲线表达式中系数所对应的二阶矩阵和三阶矩阵: 1a 2a 1a 2a 3a C= D= 2a 3a 5a 2a 3a 4a 5a 1 并利用Matlab 指令eig (C )求出矩阵C 的特征值,记录数据 行星齿轮机构传动比计算方法 Key words: epicyclic gear train; speed ratio; compute way. 随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。但是,对于刚接触行星齿轮传动的工程技术人员来说,行星齿轮传动的速比计算比较不容易理解和掌握。本文通过对各类参考资料及教科书中的行星齿轮传动速比计算方法进行总结归纳,并针对常用的最具代表性的2K-H型行星齿轮传动,分别用不同方法对其传动特性方程进行了推导论证。 行星齿轮传动或称周转轮系。根据《机械原理》[1]上的定义,我们可把周转轮系分为差动轮系和行星轮系。为理解方便,本论文所讨论限于2K-H型周转轮系。 关于行星齿轮传动(周转轮系)的速比计算方法,归纳起来有两大类四种方法,分别为由行星架固定法和力矩法组成的分析法;由速度图解法和矢量法组成的图解法[2]。矢量图解法一般适用于圆锥齿轮组成的行星齿轮传动,在此不作介绍;下面分别运用其它三种计算方法对2K-H型周转轮系的传动特性方程(1)进行推导。 1-太阳轮 2-行星轮 3-内齿圈 H -行星架 图1 行星齿轮传动 Fig 1 Epicyclic gear train 0)1(31=++-αωωαωH (1) 结合图1,式中1ω为太阳轮1的转速、H ω为行星架H 转速、3 ω为内齿圈3转速、α为内齿圈3与太阳轮1的齿数比即1 3 Z Z =α。 1 行星架固定法 机械专业教科书上一般介绍的都是此种方法,也可叫转化机构法。其理论是一位名叫Wlies 的科学家于1841年提出的,即“一个机构整体的绝对运动并不影响其内部各构件间的相对运动” [3],就像手表的时针、分针、秒针的相对运动不会因带表人的行动而变化。 如图2所示,其中太阳轮1、行星轮2、内齿圈3、行星架H 的转速分别为H ωωωω、、、321。我们假定整个行星轮系放在一个绕支点O 旋转的圆盘上,此圆盘的转速为 H ω-。那么,此时行星架的转速为()0=-+=H H H H ωωω,相当于行星行星齿轮结构及工作原理
行星齿轮传动比计算(完整资料).doc
行星地轨道及位置地数学解法.doc
行星齿轮传动比分析与计算
行星地轨道和位置地数学解法
单排双级行星轮运动特性方程式的推演
轮系及其传动比计算
揭开天体行星运动轨道的奥秘
行星齿轮机构运动规律 原理及应用分析资料讲解
(数学建模)小行星的轨迹问题
行星齿轮机构传动比计算方法
相关主题
文本预览