
Series 3725
Electropneumatic Positioner Type 3725
Application
Single-acting positioner for attachment to pneumatic globe and rotary valves.Self-calibrating,automatic adaptation to valve and actuator.
Reference variable 4 to 20 mA Travels 3.75 to 50 mm Opening angles 24 to 100°
The positioner ensures a predetermined assignment of the valve stem position (controlled variable x)to the electric input signal (reference variable w).It compares the control signal received from a controller to the travel or opening angle of the control valve and issues a corresponding output signal pressure (output variable y).
Special features
?Simple direct attachment to SAMSON Type 3277Actuator (120 to 700 cm2, Fig. 1)
?Attachment according to NAMUR (IEC 60534-6-1)
?Attachment to rotary actuators according to VDI/VDE 3845(Fig. 3)
?Attachment to SAMSON Type 3372Actuator from the V2001 valve series (Fig. 2)
?Easy operation with intuitive navigation menu using three ca-pacitive keys
?LCD easy to read in any mounting position due to selectable reading direction
?Variable, automatic start-up
?Preset parameters –only values deviating from the standard need to be adjusted
?All parameters saved in EEPROM (protection against power failure)
?Two-wire system with a small electrical load of 300W ?Tight-closing function can be activated ?Continuous monitoring of zero point ?Non-contact position sensing
?Unaffected by environmental effects and steam hammering
Version
–Type 3725·Electropneumatic postioner with local opera-
tion and LCD
Associated Information Sheet T 8350EN Edition December 2011
Data Sheet
T 8394 EN
Fig.1
Type 3725,direct attach-ment to Type 3277Pneumatic Actuator
Fig.3
Type 3725,attachment to rotary actuator according to VDI/VDE
3845
Fig.2
Type 3725,attachment to Type 3372Actuator
Principle of operation
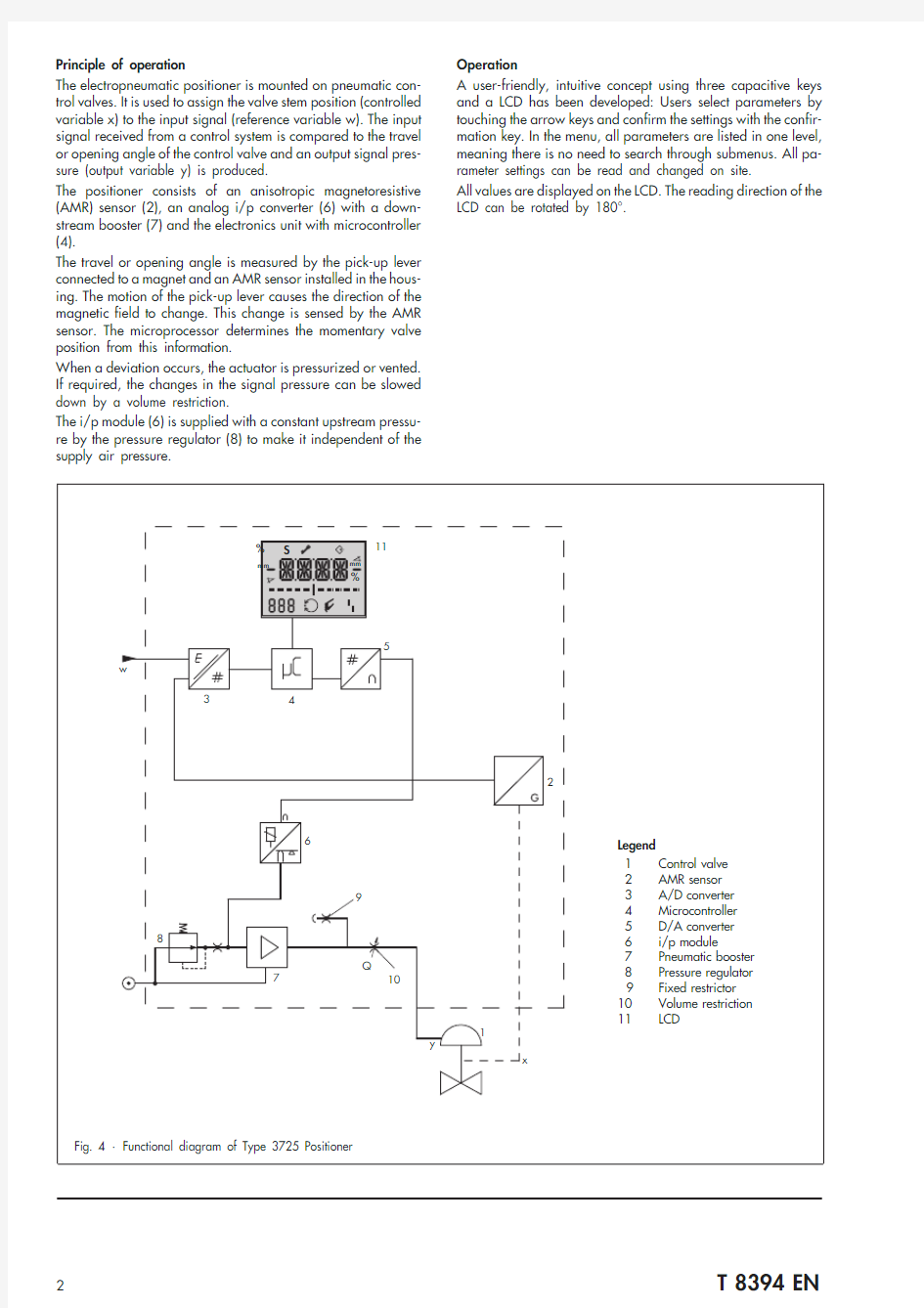
The electropneumatic positioner is mounted on pneumatic con-trol valves.It is used to assign the valve stem position(controlled variable x)to the input signal(reference variable w).The input signal received from a control system is compared to the travel or opening angle of the control valve and an output signal pres-sure (output variable y) is produced.
The positioner consists of an anisotropic magnetoresistive (AMR)sensor(2),an analog i/p converter(6)with a down-stream booster(7)and the electronics unit with microcontroller (4).
The travel or opening angle is measured by the pick-up lever connected to a magnet and an AMR sensor installed in the hous-ing.The motion of the pick-up lever causes the direction of the magnetic field to change.This change is sensed by the AMR sensor.The microprocessor determines the momentary valve position from this information.
When a deviation occurs,the actuator is pressurized or vented. If required,the changes in the signal pressure can be slowed down by a volume restriction.
The i/p module(6)is supplied with a constant upstream pressu-re by the pressure regulator(8)to make it independent of the supply air pressure.Operation
A user-friendly,intuitive concept using three capacitive keys and a LCD has been developed:Users select parameters by touching the arrow keys and confirm the settings with the confir-mation key.In the menu,all parameters are listed in one level, meaning there is no need to search through submenus.All pa-rameter settings can be read and changed on site.
All values are displayed on the LCD.The reading direction of the LCD can be rotated by 180°.
2T8394EN
Table 1·Technical data
3T8394EN
Positioner attachment
The Type 3725Electropneumatic Positioner can be attached di-rectly to the Type 3277 Actuator over a connection block.
When attached to the Type 3277-5Actuator (120cm2),the sig-nal pressure is routed over an internal bore in the actuator yoke to the actuator.
In actuators with fail-safe action “Actuator stem retracts”and in actuators with effective diaphragm areas of 240cm2or larger,the signal pressure is routed to the actuator over ready-made external piping.
Ordering text
Type 3725 Positioner
–Without pneumatic connecting rail (only for direct attachment to Type 3277 Actuator)
–Direct attachment to Type 3277 Actuator (120 to 700 cm2)–Attachment according to IEC 60534-6-1 (NAMUR)–Attachment to rotary actuators acc. to VDI/VDE 3845–Attachment to Type 3278 Rotary Actuator (160/320 cm2)–With pneumatic connecting rail G ?–With pneumatic connecting rail ? NPT
–Without/with pressure gauge up to max. 6 bar
T 8394
EN
SAMSON AG ·MESS- UND REGELTECHNIK
Weismüllerstra?e 3·60314 Frankfurt am Main · Germany Phone: +49 69 4009-0·Fax: +49 69 4009-1507Internet:http://www.samson.de
2012-02
Summary of explosion protection certificates (issued)
Article code
II 2G Ex ia IIC T4according to ATEX
1
1
西门子定位器调整步骤 一、调试前准备工作 1接汽源,再接电源,将电流给到4mA以上 2如定位器没有调试过,这时显示屏中应出现P进入组态,先按“+”再同时按“—”,反之相同,看阀门的最大点或最小点。 3看最小点应在5-9之间,不对调定位器的黑色齿轮。看最大点应不超过95,调最小点尽量接近5. 4用“+”、“—”键将阀门行程调到50%,调试前准备工作完成。 注意:如果定位器调试过必须清零,清零步骤为:按手键进入(新出的为50,最初的为55),再按“+”5秒出现OCAY,再按手键5秒,出现C4抬手出现P,进入组态后调试步骤同以上2、3、4相同。 二、初始化的调校步骤 Ⅰ、执行机构的自动初始化 注:自动初始化前一定要正确设定阀门的开关方向!否则初始化无法进行! 1.正确移动执行机构,离开中心位置,开始初始化。 直行程选择:;角行程选择:,用“+”,“—”键切换; 2.短按功能键,切换到第二参数: 显示:或,用“+”,“—”键切换; 注:这一参数必需与杠杆比率开关的设定值相匹配。 3.用功能键切换到参数三,显示如下: 显示: 如果你希望在初始化阶段完成后,计算的整个冲程量用mm 表示,这一步必须设置。为此,你需要在显示屏上选择与刻度杆上驱动钉设定值相同的值。 4.用功能键切换参数四,显示如下: 显示: 5.下按“+”键超过 5 秒,初始化开始 显示: 初始化进行时,“RUN1”至“RUN5”一个接一个出现于显示屏下行。 注:初始化过程依据执行机构,可持续 15 分钟。 有下列显示时,初始化完成。
在你短促下压功能键后,出现显示: 通过下按功能键超过 5 秒,退出组态方式。约5 秒后,软键显示将出现。松开功能键后,装置将在Manual 方式,按功能键将方式切换为AUTO,此时可以远控操作。 Ⅱ、执行器手动初始化 利用这一功能,不需硬性驱动执行机构到终点位置即可进行初始化。杆的开始和终止位置可手工设定。初始化剩下的步骤(控制参数最佳化)如同自动初始化一样自动进行。 直行程执行机构手动初始化的顺序步骤。 1.对直行程执行机构实行初始化。通过手工驱动保证覆盖全部冲程,即显示电 位计设定处于P5.0 和P95.0 的允许范围中间 2.下按功能键 5 秒以上,你将进入组态方式。 直行程选择:;角行程选择:,用“+”,“—”键切换; 3.短按功能键,切换到第二参数: 显示:或,用“+”,“—”键切换; 注:这一值必需与传送速率选择器的设定相对应。(33°或90°) 4.用功能键切换到参数三,显示如下: 显示: 如果你希望初始化过程结束时,测定的全冲程用mm 表示,你需要在显示器中选择与驱动销钉在杆刻度上设定的值相同,或对介质调整来说下一个更高的值。 5.通过下按功能,选择参数五: 显示: 6. ①先按住“—”再同时按住“+”键,快关阀门(显示在6.5左右),否则调节黑色旋钮调节,使其在范围内; 注:如果按此操作显示的数是减小的,请先调整执行器的开关方向; ②然后先按住“+”再同时按住“—”键,快开阀门。开展后观察显示应在95以内,否则调节黑色旋钮,使其在正常范围内,然后下按功能键确认; ③先按住“—”再同时按住“+”键快关阀门,显示应在5到9之间,然后按下功能键确认; ④初始化自动开始。 ⑤初始化的停止是自动出现的。RUN1 到RUN5 顺序出现在显示屏的下行。当初始化已全部完成时,出现如下显示: 显示:
PS2阀门定位器简明操作指南 准备: 1.按照操作说明书将PS2与阀门连接. 2.检查并确认电路和气路的连接. 3.通电(4—20mA电流供电). 4.禁止电压供电. 初始化 没有经过初始化的定位器,接入电流信号后,LCD屏幕右下方出现闪烁细体“NOINI”字母.此时按上升键或下降键可以使执行机构动作,LCD屏幕能显示粗黑字体Pxx.x。在没有做初始化前,首先要做到按上升键使阀杆上升到最高,LCD屏幕显示的数值大约在P85~95% 之间,按下降键;使阀杆下降到最低,LCD屏幕显示的数值大约在P5~10%之间,在中间的过程中不能出现P---.--情况,否则需要做一系列的调整。 以直行程调节阀为例: 调节阀杠杆行程<20 mm (阀门开度), 气开阀. 叙说如下; 选择反馈角度33°、量程<=20 mm 和90°、量程>=20 mm,分别利用调节轮和反馈杆长度调整PS2的零点和量程。PS2定位器与阀体固定前,先将反馈杠杆支点调整并固定在反馈杆上刻有33°、15 、20 一侧的20位置左右,U形定位槽与反馈支点配合使用,并与阀体固定. ⑴确定定位器内的33°/90°切换开关置于33°位置,互锁齿轮置于33°(黄颜色)(可参阅与定位器一起提供的资料)。 参见图1. ⑵通电、通气后, 按手键(组态键)>5秒,则会出现1. YFCT 上方黑体显示WAY、再按一下出现2.YAGL,上方黑体显示 33°,每按一下出现下一个新的参数值。 需要给定位器内的程序赋值;参数1设置在WAY, 参数2 设置在33°, 参数3设置在20 mm。 a. 将一字螺丝刀(4mm宽)插入黄颜色轮夹紧轮齿轮状部件内部,向右拨动,松开夹紧装置,向左或者向右转动耦合调节轮,阀杆位移指针指向阀位刻度0%左右时, (与下降键配合使用),使量程下限(液晶显示)在5%~10%左右,并记录其数值为P1。 b. 按上升键,使阀杆指针指向阀位刻度100%左右, 使量程上限(液晶显示)数值连续上升不出现------ 的越限符号。量程范围在90%~98%左右,并记录其数值为P2。 c. 如果显示>100 则重新调整反馈杠杆支点离转轴远一点. d. 如果显示<100 则重新调整反馈杠杆支点离转轴近一点. ⑶位置开关、轮状夹紧装置(黄颜色),都锁紧。(一字螺丝刀向左拨动,则锁紧夹紧装置)如不再需要其它相关参数,可 直接进入A.步骤。 ⑷如需要更多的参数设置,可进入参数设置程序,并确认相关参数(参数1、参数2、-- -- -- -- -- 参数55.) 几个重要参数:(举例.实际操作按照说明书或工艺过程要求设置). 参数1. YFCT (执行机构的类型)WAY (直行程). 参数2. YAGL (反馈角)33° 参数3. YWAL (行程范围)由调节阀行程决定. 参数4. INITA (自动初始化) 参数5. INITM (手动初始化) 参数41. YCUP (紧密关闭值)99%(仅上升). 参数55. PRST (工厂设置)Strt A. 将记录的数值P1或P2进行简单的运算;即:P1+(P2﹣P1)÷2。若;P1量程下限(液晶显示)在4.8%,P2量程上限 (液晶显示)在95%,则:4.8+(95﹣4.8)÷2 = 49.9 。用手健操作,确认阀门开度位置在刻度值50%左右,(液晶显示)开度在50% ±5%左右。 B.在运行模式下,按手键>5秒,进入参数4,则PS2进入自动初始化,在按上升键>5秒,液晶显示‘strt.’之后,随即右下 方逐步出现(Run1、2、3、4、5)之后,右下方显示字体‘FINSH’表示初始化已完成。此时按手键>5秒,退出组态模式,进入运行模式,液晶右下方显示为;Man 字样,表示进入了手动运行模式,再按一下手键,液晶右下方显示为; Aut 字样,表示进入了自动运行模式。此时,输入电流信号,执行机构的行程与将与4 ~20mA相一致。定位器可以正常运行了。
西门子定位器调试 及智能定位器技术介绍 压电阀介绍: 1、引言 传统的气动阀中大量使用了电磁铁作为电-机械转换级,其把电控制信号转换为机械的位移,推动阀芯,实现气路的切换或气体压力、流量的比例控制。作为电-机械转换级的电磁铁有价格低廉,操作使用方便等优点;但其也有很多缺点:如功耗大、响应速度不够快、存在发热及有电磁干扰等。把压电材料的电-机械转换特性引入到气动阀中,作为气动阀的电-机械转换级,这是一项不同于传统气动阀的全新技术。采用了压电技术的气动阀在性能上有着传统气动阀无可比拟的优势。 2、压电效应简介 对于晶体构造中不存在对称中心的异极晶体,加在晶体上的张紧力、压应力或切应力,除了产生相应的变形外,还将在晶体中诱发出介电极化或电场。这一现象被称为正压电效应;反之,若在这种晶体上加上电场,从而使该晶体产生电极化,则晶体也将同时出现应变或应力,这就是逆压电效应。两者通称为压电效应。1880 年居里兄弟发现了电气石的压电效应,从此开始了压电学的历史。压电式气动换向阀即是利用压电逆效应而研制的。 3、压电技术在气动阀中的应用 1、微型直动式换向阀 利用压电材料在电场作用下的变形,来实现气动阀阀口的开启和关闭,这样就可以做成微型直动式换向阀。如下图所示的微型二位三通换向阀,1 口为进气口,2 口为输出气口,3、口为排气口,阀中间的弯曲部件为压电材料组成的压电片。当没有外加电场作用时,阀处于:图1 状态:进气口关闭,输出气口2 经排气口3 通大气。当在压电阀片上外加控制电场后,压电阀片产生变形上翘,上翘的压电阀片关闭了排气口3,同时进气口1 和输出气口2 连通。这样就完全实现了传统二位三通电磁换向阀的功能。 图1 图2 2、压电式电气比例调压阀 压电材料的变形量正比于施加在其上的电场强度,利用这一特点,可以开发出比例调压阀。如图3 所示,施加不同的控制电压到压电阀片上,压电阀片产生不同的弯曲变形量,这样就在进气口1 与输出气口2 之间及输出气口2 与排气口3 之间形成不同的气流阻力,从而在输出气口2 的得到不同的气体压力。由于压电阀片在变形过程中不受机械摩擦力,且压电阀片有响应快功耗低的特点,基于压电阀片的电气比例调压阀很多性能优于传统的比例调压阀。例如其没有死区,压力可以从零开始连续调节;其响应快,可满足高速系统的应用要求;其功耗低,对电源功率要求低。
西门子阀门定位器操作手册 压电阀介绍: 1、引言 传统的气动阀中大量使用了电磁铁作为电-机械转换级,其把电控制信号转换为机械的位移,推动阀芯,实现气路的切换或气体压力、流量的比例控制。作为电-机械转换级的电磁铁有价格低廉,操作使用方便等优点;但其也有很多缺点:如功耗大、响应速度不够快、存在发热及有电磁干扰等。把压电材料的电-机械转换特性引入到气动阀中,作为气动阀的电-机械转换级,这是一项不同于传统气动阀的全新技术。采用了压电技术的气动阀在性能上有着传统气动阀无可比拟的优势。 2、压电效应简介 对于晶体构造中不存在对称中心的异极晶体,加在晶体上的张紧力、压应力或切应力,除了产生相应的变形外,还将在晶体中诱发出介电极化或电场。这一现象被称为正压电效应;反之,若在这种晶体上加上电场,从而使该晶体产生电极化,则晶体也将同时出现应变或应力,这就是逆压电效应。两者通称为压电效应。1880 年居里兄弟发现了电气石的压电效应,从此开始了压电学的历史。压电式气动换向阀即是利用压电逆效应而研制的。 3、压电技术在气动阀中的应用 1、微型直动式换向阀 利用压电材料在电场作用下的变形,来实现气动阀阀口的开启和关闭,这样就可以做成微型直动式换向阀。如下图所示的微型二位三通换向阀,1 口为进气口,2 口为输出气口,3、口为排气口,阀中间的弯曲部件为压电材料组成的压电片。当没有外加电场作用时,阀处于:图1 状态:进气口关闭,输出气口2 经排气口3 通大气。当在压电阀片上外加控制电场后,压电阀片产生变形上翘,上翘的压电阀片关闭了排气口3,同时进气口1 和输出气口2 连通。这样就完全实现了传统二位三通电磁换向阀的功能。 图1 图2 2、压电式电气比例调压阀 压电材料的变形量正比于施加在其上的电场强度,利用这一特点,可以开发出比例调压阀。如图3 所示,施加不同的控制电压到压电阀片上,压电阀片产生不同的弯曲变形量,这样就在进气口1 与输出气口2 之间及输出气口2 与排气口3 之间形成不同的气流阻力,从而在输出气口2 的得到不同的气体压力。由于压电阀片在变形过程中不受机械摩擦力,且压电阀片有响应快功耗低的特点,基于压电阀片的电气比例调压阀很多性能优于传统的比例调压阀。例如其没有死区,压力可以从零开始连续调节;其响应快,可满足高速系统的应用要求;其功耗低,对电源功率要求低。 图3
ABB定位器 一、气路连接 使用与定位器气源端口处标识的标准接口连接气源 连接定位器的输出与气动执行器的气缸 二、电气连接 根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32) 三、调试步骤 1、接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大 供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。 2、接通4---20mA输入信号。(定位器的工作电源取自输入信号,由DCS二线制 供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。 3、检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器 供货商安装调试完毕,只需作检查确认,该步并非必须):
按住MODE键,并同时点击↑或↓键,直到操作模式代码显示出来。松开 MODE 键,使用↑或↓键操作,使执行器分别运行到两个终端位置,记录两终端 角度。 两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28o--- +28o之内。 角行程应用范围在 -57o--- +57o之内。 全行程角度应不小于25o 4、切换至参数配置菜单:同时按住↑或↓键,点击ENTER键等待3秒,计数器 从3计数到0,松开↑或↓键,程序自动进入配置菜单。 5、使用↑或↓键选择定位器安装形式为直行程或角行程。 角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心 一般角位移为90o 直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60o, 用于驱动直行程阀门气动执行器。 注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且 线性化校正数据库不同,可能导致较大的非线性误差。 6、启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定): 按住MODE键,点击↑键一次或多次,直到显示出“P1.1”,松开MODE键,按住ENTER键3秒直到计数器倒计数到0,松开ENTER 键,自动调整程 序开始运行(显示器显示正在进行的程序语句号),自动调整程序顺利结 束后,显示器显示“COMPLETE”。
西门子定位器使用二大核心:基础设置初始化调试步骤! 仪表人自己的圈子阀门定位器是起控制作用的,配合气动执行机构一起使用,它控制着阀门的开度,实现精确定位,地位可见不一般。西门子定位器,也是众多仪表人的好朋友,但是如何维护好他,用好他,学问很多,那么作为一名仪表人,首要掌握二大核心:基础设置+初始化调试步骤!思考题:西门子定位器经常出现喘气现象?什么原因?怎么解决? (参与底部留言,获赞最多,免费领取圈服一件!)小常识阀门定位器工作原理:阀门定位器是控制阀的主要附件.它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移倍与控制器输出信号之间的一一对应关系。因此,阀门定位器组成以阀杆位移为测量信号,以控制器输出为设定信号的反馈控制系统。该控制系统的操纵变量是阀门定位器去执行机构的输出信号。阀门定位器的作用主要有:1.改善调节阀的静态特性,提高阀门位置的线性度。2.改善调节阀的动态特性,减少调节信号的传递滞后。3.改变调节阀的流量特性。4.改变调节阀对信号压力的响应范围实现分程控制。5.使阀门动作反向。西门子定位器基本设置步骤
准备工作:1、将定位器、执行器及其它气路元件用气源管连好,并给上气源。2、将定位器的信号线和反馈线连接完毕。3、现在定位器处于手动模式,在定位器显示窗口上方显示的为电位计的电压百分数,例如:“P 12.3”,窗口的下方闪烁显示“NOINIT”即“未初始化”。4、用定位器显示窗口下方的‘+’和‘-’两个按键,使执行机构运动,看整个机构能否自由走满行程。5、让执行器运动到行程的中间位置(直行程的反馈杆处于水平位置),就可以进行初始化了。注:当你按住其中一个键的同时再按另一个键可以加快执行机构的 动作。 参数设置:1、按功能键(小手形)5秒后就可以进行参数设置。2、SIEMENS定位器共有36组参数,可以根据现场的实际情况进行设置。用‘+’和‘-’键可以在一组参数中进行选择,选择完后可以按一下功能键进入第二组参数的设置,若上一个参数设置有误,可以按功能键同时按‘-’键,回到上一个参数再进行设置。3、在这些参数中有几个是经常用到的。YFCT (执行器类型):直行程选WAY,角行程选TURN。YAGL (额定反馈角度):一般情况下,直行程设置成33、角行程90。SDIR:给定方向上升RISE,给定方向下降FALLYDIR (操作变量方向显示):上升RISE,下降FALL同时改变SDIR和YDIR这两组参数可改变执行器动作方向。 初始化:1、开始初始化时执行器必须处于行程的中间位置。
西门子智能定位器调试说明: SIPART PS2电气定位器用来控制气动直行程或角行程执行机构如下图: 角行程 直行程
一、智能定位器功能图: 说明:1、①机侧凝结水补充水箱出口调门为单作用定位器,反馈:61-ZI+;62-ZI-;②当失信号时阀门全开③操作时按“+”健阀门向关方向走,按“-”健阀门向全开方向走(与说明书上相反)。(单作用铭牌)
2、炉侧磨煤机入口冷热风调门为双作用定位器,(双作用铭牌)
3.炉侧磨煤机入口冷热风调门为双作用定位器接线原理图: 二、校验与调整 1、参数设置: (定位器上有三个按键:小手形、“+”健、“-健”) 1.1 按住功能键(小手形)5秒后就可以进行参数设置 1.2 西门子智能定位器共有55组参数,可以根据现场实际情况进行设置。用“+”和“-” 健可在一组参数中进行选择,选择完了可以按一下功能键进入第二组参数的设置,若上一个参数有误,可以按功能键的同时按住“-”健,回到上一个参数进行设置。 1.3 组态:以下几个参数是经常用到的,具体请参考说明书上的组态表。 YFCT(参数组号①)执行器类型:直行程选WAY,角行程选TURN(本厂机侧的凝结水补充水箱出口调门和炉侧的磨煤机入口冷热风调门都为直行程) YAGL②额定反馈角度:一般情况下直行程33度,角行程90度,(本厂本厂机侧的凝结水补充水箱出口调门和炉侧的磨煤机入口冷热风调门都为直行程,但选的是90度,具体应该看反馈杆的长度,短杠杆33度的长度为:5/10/15/20mm,短杠杆90度的长度
为:25/30/35mm,长杠杆90度的长度为:40/50/60/70/90/110/130mm) INITA④初始化(自动) SDIR⑦给定方向:上升RISE,下降FAIL YDIR(38)操作变量显示:上升RISE,下降FAIL.同时改变SDIR和YDIR这两组的参数可以改变执行器的动作方向。 2、西门子智能定位器初始化步骤: 2.1 接通4-20mA输入信号,现在定位器处于手动模式“MAN”,在定位器显示窗口上方显示的为电位计的电压百分数,例如:“P12.3”,窗口的下方闪烁显示“HDINIT”即“未初始化”; 2.2 用定位器显示窗口下方的“+”和“-”两个按键使执行机构运动,看整个机构是否走满全程; 2.3 让执行器运动到行程的中间位置(直行程的反馈杆处于水平位置)就可以进行初始化了。 (注:当按住一个健的同时再按住另一个健可以加快执行机构动作。如想要执行机构向开的方向运动的更快需按住“+”健的同时再按住“-”健。) 2.4 参数设置完毕后,用功能键切换到第四个参数,即显示“4.INIT”,按住”+”健5秒定位器就可以自动初始化了。 2.5 初始化一共分为5步: RUN1 决定动作方向 RUN2 检查执行机构行程和零点 RUN3 确定执行机构上下动作时间,按住“+”健停止,按“-”健开始泄漏检查RUN4 确定最小的定为增量 RUN5 最佳的瞬时响应 2.6 当初始化完成时屏幕显示“FINISH”按一下功能健显示“4.INIT”。按功能键5秒后,当屏幕显示有变化时松手,定位器进入手动模式,再按一下功能键定位器处于自动模式。 2.7 此时初始化结束,定位器进入正常工作状态,日常使用时按一下功能键可在自动和手动间切换,手动时按“+”“-”使执行器动作。 3、初始化过程中易出现的故障及解决方法: (双击打开此图标) 4、三段保护原理: ①使用信号检测装置,可以调整动作电流值,当电流小于4mA(或任意一设定值,即 断信号)时通过动作电磁阀,释放锁定阀讯号压力闭锁执行器气路,从而实现断信号保位的功能; ②断电保位就是通过动作电磁阀,释放锁定阀讯号压力实现; ③断气保位是直接用闭锁阀实现。
西门子定位器调整步骤 令狐采学 一、调试前准备工作 1接汽源,再接电源,将电流给到4mA以上 2如定位器没有调试过,这时显示屏中应出现P进入组态,先按“+”再同时按“—”,反之相同,看阀门的最大点或最小点。 3看最小点应在5-9之间,不对调定位器的黑色齿轮。看最大点应不超过95,调最小点尽量接近5. 4用“+”、“—”键将阀门行程调到50%,调试前准备工作完成。 注意:如果定位器调试过必须清零,清零步骤为:按手键进入(新出的为50,最初的为55),再按“+”5秒出现OCAY,再按手键5秒,出现C4抬手出现P,进入组态后调试步骤同以上 2、3、4相同。 二、初始化的调校步骤 Ⅰ、执行机构的自动初始化 注:自动初始化前一定要正确设定阀门的开关方向!否则初始化无法进行! 1.正确移动执行机构,离开中心位置,开始初始化。 直行程选择:;角行程选择:,用“+”,“—”键切换;
2.短按功能键,切换到第二参数: 显示:或,用“+”,“—”键切换; 注:这一参数必需与杠杆比率开关的设定值相匹配。 3.用功能键切换到参数三,显示如下: 显示: 如果你希望在初始化阶段完成后,计算的整个冲程量用mm 表示,这一步必须设置。为此,你需要在显示屏上选择与刻度杆上驱动钉设定值相同的值。 4.用功能键切换参数四,显示如下: 显示: 5.下按“+”键超过 5 秒,初始化开始 显示: 初始化进行时,“RUN1”至“RUN5”一个接一个出现于显示屏下行。 注:初始化过程依据执行机构,可持续 15 分钟。 有下列显示时,初始化完成。 在你短促下压功能键后,出现显示: 通过下按功能键超过 5 秒,退出组态方式。约5 秒后,软键显示将出现。松开功能键后,装置将在Manual 方式,按功能键将方式切换为AUTO,此时可以远控操作。
一、调试前准备工作 1.按照操作说明书将PS2与阀门连接,接汽源,再接电源(4—20mA电流供电)。 2.没有经过初始化的定位器,接入电流信号后,LCD屏幕右下方出现闪烁细体“NOINI”字母。此时按上升键(即“+”键)或下降键(即“-”键)可以使执行机构动作,先按“+”再同时按“-”,反之相同,看阀门的最大点或最小点。 3.最小点应在5-9%(液晶显示)之间,不在时,调定位器的黑色齿轮(耦合调节轮);最大点应不超过95%(液晶显示),不对时,调定位器的黑色齿轮(耦合调节轮)。在中间的过程中不能出现P---情况,否则需要通过耦合调节轮等做一系列的调整。 a.将一字螺丝刀(4mm宽)插入黄颜色轮夹紧轮齿轮状部件内部,向右拨动,松开夹紧装置,向左或者向右转动耦合调节轮,阀杆位移指针指向阀位刻度0%左右时,(与下降键配合使用),使量程下限(液晶显示)在5-9%之间。 b.按上升键,使阀杆指针指向阀位刻度100%左右,使量程上限(液晶显示)数值连续上升不出现-----的超限符号。液晶显示应接近且不大于95%。 c.如果显示>95则重新调整反馈杠杆支点离转轴远一点。 d.如果显示<90则重新调整反馈杠杆支点离转轴近一点。 e.位置开关、轮状夹紧装置(黄颜色),都锁紧。(一字螺丝刀向左拨动,则锁紧夹紧装置)。 f.如需要更多的参数设置,可进入参数设置程序,并确认相关参数(参数1、参数2、……参数55.) 几个重要参数:(举例,实际操作按照说明书或工艺过程要求设置)。 参数1. YFCT (执行机构的类型)WAY (直行程) 参数2. YAGL (反馈角)33° 参数3. YWAL (行程范围)由调节阀行程决定 参数4. INITA (自动初始化) 参数5. INITM (手动初始化) 参数6. SCUR (输入电流范围)4~20mA 参数7. SDIR (正反作用) 由工艺过程要求决定 参数8. SPRA (分程范围设置起点) 0.0%
西门子智能定位器调试说明: SIPART PS2电气定位器用来控制气动直行程或角行程执行机构如下 图: 角行程?直行程 一、智能定位器功能图:
说明:1、①机侧凝结水补充水箱出口调门为单作用定位器,反馈:61-ZI+;62—ZI-;②当失信号时阀门全开③操作时按“+”健阀门向关方向走,按“—"健阀门向全开方向走(与说明书上相反)、(单作用铭牌)
2、炉侧磨煤机入口冷热风调门为双作用定位器,(双作用铭牌) 3.炉侧磨煤机入口冷热风调门为双作用定位器接线原理图:
二、校验与调整 1、参数设置: (定位器上有三个按键:小手形、“+”健、“—健”) 自动模式(MAN手动)阀门实际开度指令开度 1.1按住功能键(小手形)5秒后就可以进行参数设置 1.2西门子智能定位器共有55组参数,+"与“—” 健可在一组参数中进行选择,选择完了可以按一下功能键进入第二组参数得设置,若上一个参数有误,可以按功能键得同时按住“-”健,回到上一个参数进行设置。1。3 组态:以下几个参数就是经常用到得,具体请参考说明书上得组态表、 YFCT(参数组号①)执行器类型:直行程选WAY,角行程选TURN(本厂机侧得凝结水补充水箱出口调门与炉侧得磨煤机入口冷热风调门都为直行程) YAGL②额定反馈角度:一般情况下直行程33度,角行程90度,(本厂本厂机侧得凝结水补充水箱出口调门与炉侧得磨煤机入口冷热风调门都为直行程,但选得就是90度,具体应该瞧反馈杆得长度,短杠杆33度得长度为:5/10/15/20mm,短杠杆90度得长度为:25/30/35mm,长杠杆90度得长度为:40/50/60/70/90/110/130mm) INITA④初始化(自动) SDIR⑦给定方向:上升RISE,下降FAIL YDIR(38)操作变量显示:上升RISE,下降FAIL。同时改变SDIR与YDIR这两组得参数可以改变执行器得动作方向。 2、西门子智能定位器初始化步骤:
西门子定位器调试步骤 一、安装:安装之前先通气,使摆动气缸处于完全关闭状态,同时阀门也要 处于关闭状态,这时将气路断开将摆动气缸与阀门安装固定; 二、调整确定气路:将定位器进气管和出气管与摆动气缸连接,接通气源, 将气压调整到0.4-0.6之间,此时阀门应处于关闭状态,否则将摆动气缸两条气路对换,调整好后气路无需再次更换。此步操作为确保阀门断电时处于关闭状态; 三、改变行程:打开定位器端盖,将比率开关位置调整到90°; 四、手动检查:接通4-20mA电流(端子6,8;6+,8-),在组态方式下内(通 过长按方式键进入和退出组态方式,正常显示时短按方式键切换手动自动方式)将参数1改为turn,退出组态方式,进入手动方式,按+键阀门应该逐渐打开,按-键阀门应该逐渐关闭。(若相反,应改变参数1为ncsl)在阀门全行程范围内应转动灵活,无卡阻现象和异响; 五、确定显示:手动方式进行检查时,阀门全开时,阀门开度显示值应最大, 阀门全关时,阀门开度显示值应最小,否则改变参数38 六、确定自动控制方向:切换至自动方式,送入4mA电流阀门应关闭,送入 20mA电流阀门应打开,否则改变参数7; 七、初始化:通过上述操作,定位器基本信息都已确定。进入组态方式,在 参数4状态下,长按+键,进行自动初始化,初始化完毕会显示finish(期间可能会提示调整量程下限,调整转差离合调整轮,使显示处于8左右后短按+键,初始化会继续完成),短按方式键退出组态方式,长按方式键退出组态方式。 八、开关量确定:将仪表预给料触点接至(端子9,10)将定位器参数42改 为DOWN,停止预给料,阀门应全部关闭。 九、输出电流测试:若配置输出电流反馈板,将电流板安装连接好,测试在 不同开度电路输出值均正确(至少测试四个点)方可。 十、调试结果检查:进入自动方式,送入4mA 阀门应完全关闭同时显示为 最小值,送入12mA阀门应处于半开状态同时显示为量程的一半左右,送入20mA阀门应处于完全打开状态同时显示为最大值,此时断电阀门在气压作用下应完全关闭。若完全符合上述情况,拆除外连接导线,上好端盖。调试结束
阀门定位器工作原理: 阀门定位器是控制阀的主要附件.它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移倍与控制器输出信号之间的一一对应关系。因此,阀门定位器组成以阀杆位移为测量信号,以控制器输出为设定信号的反馈控制系统。该控制系统的操纵变量是阀门定位器去执行机构的输出信号。 阀门定位器的作用主要有: 1.改善调节阀的静态特性,提高阀门位置的线性度。 2.改善调节阀的动态特性,减少调节信号的传递滞后。 3.改变调节阀的流量特性。 4.改变调节阀对信号压力的响应范围实现分程控制。 5.使阀门动作反向。 西门子定位器基本设置步骤 准备工作: 1、将定位器、执行器及其它气路元件用气源管连好,并给上气源。 2、将定位器的信号线和反馈线连接完毕。 3、现在定位器处于手动模式,在定位器显示窗口上方显示的为电位计的电压百分数,例如:“P 12.3”,窗口的下方闪烁显示“NOINIT”即“未初始化”。
4、用定位器显示窗口下方的‘+’和‘-’两个按键,使执行机构运动,看整个机构能否自由走满行程。 5、让执行器运动到行程的中间位置(直行程的反馈杆处于水平位置),就可以进行初始化了。 注:当你按住其中一个键的同时再按另一个键可以加快执行机构的动作。 参数设置: 1、按功能键(小手形)5秒后就可以进行参数设置。 2、SIEMENS定位器共有36组参数,可以根据现场的实际情况进行设置。用‘+’和‘-’键可以在一组参数中进行选择,选择完后可以按一下功能键进入第二组参数的设置,若上一个参数设置有误,可以按功能键同时按‘-’键,回到上一个参数再进行设置。 3、在这些参数中有几个是经常用到的。 YFCT(执行器类型):直行程选WAY,角行程选 TURN。 YAGL(额定反馈角度):一般情况下,直行程设置成33、角行程90。SDIR:给定方向上升RISE,给定方向下降FALL YDIR(操作变量方向显示):上升RISE,下降FALL 同时改变SDIR和YDIR这两组参数可改变执行器动作方向。 初始化: 1、开始初始化时执行器必须处于行程的中间位置。
西门子定位器调试及智能定位器技术介绍 压电阀介绍: 1、引言 传统的气动阀中大量使用了电磁铁作为电-机械转换级,其把电控制信号转换为机械的位移,推动阀芯,实现气路的切换或气体压力、流量的比例控制。作为电-机械转换级的电磁铁有价格低廉,操作使用方便等优点;但其也有很多缺点:如功耗大、响应速度不够快、存在发热及有电磁干扰等。把压电材料的电-机械转换特性引入到气动阀中,作为气动阀的电-机械转换级,这是一项不同于传统气动阀的全新技术。采用了压电技术的气动阀在性能上有着传统气动阀无可比拟的优势。 2、压电效应简介 对于晶体构造中不存在对称中心的异极晶体,加在晶体上的张紧力、压应力或切应力,除了产生相应的变形外,还将在晶体中诱发出介电极化或电场。这一现象被称为正压电效应;反之,若在这种晶体上加上电场,从而使该晶体产生电极化,则晶体也将同时出现应变或应力,这就是逆压电效应。两者通称为压电效应。1880 年居里兄弟发现了电气石的压电效应,从此开始了压电学的历史。压电式气动换向阀即是利用压电逆效应而研制的。 3、压电技术在气动阀中的应用 1、微型直动式换向阀 利用压电材料在电场作用下的变形,来实现气动阀阀口的开启和关闭,这样就可以做成微型直动式换向阀。如下图所示的微型二位三通换向阀,1 口为进气口,2 口为输出气口,3、口为排气口,阀中间的弯曲部件为压电材料组成的压电片。当没有外加电场作用时,阀处于:图1 状态:进气口关闭,输出气口2 经排气口3 通大气。当在压电阀片上外加控制电场后,压电阀片产生变形上翘,上翘的压电阀片关闭了排气口3,同时进气口1 和输出气口2 连通。这样就完全实现了传统二位三通电磁换向阀的功能。 图1 图2 2、压电式电气比例调压阀 压电材料的变形量正比于施加在其上的电场强度,利用这一特点,可以开发出比例调压阀。如图3 所示,施加不同的控制电压到压电阀片上,压电阀片产生不同的弯曲变形量,这样就在进气口1 与输出气口2 之间及输出气口2 与排气口3 之间形成不同的气流阻力,从而在输出气口2 的得到不同的气体压力。由于压电阀片在变形过程中不受机械摩擦力,且压电阀片有响应快功耗低的特点,基于压电阀片的电气比例调压阀很多性能优于传统的比例调压阀。例如其没有死区,压力可以从零开始连续调节;其响应快,可满足高速系统的应用要求;其功耗低,对电源功率要求低。 图3