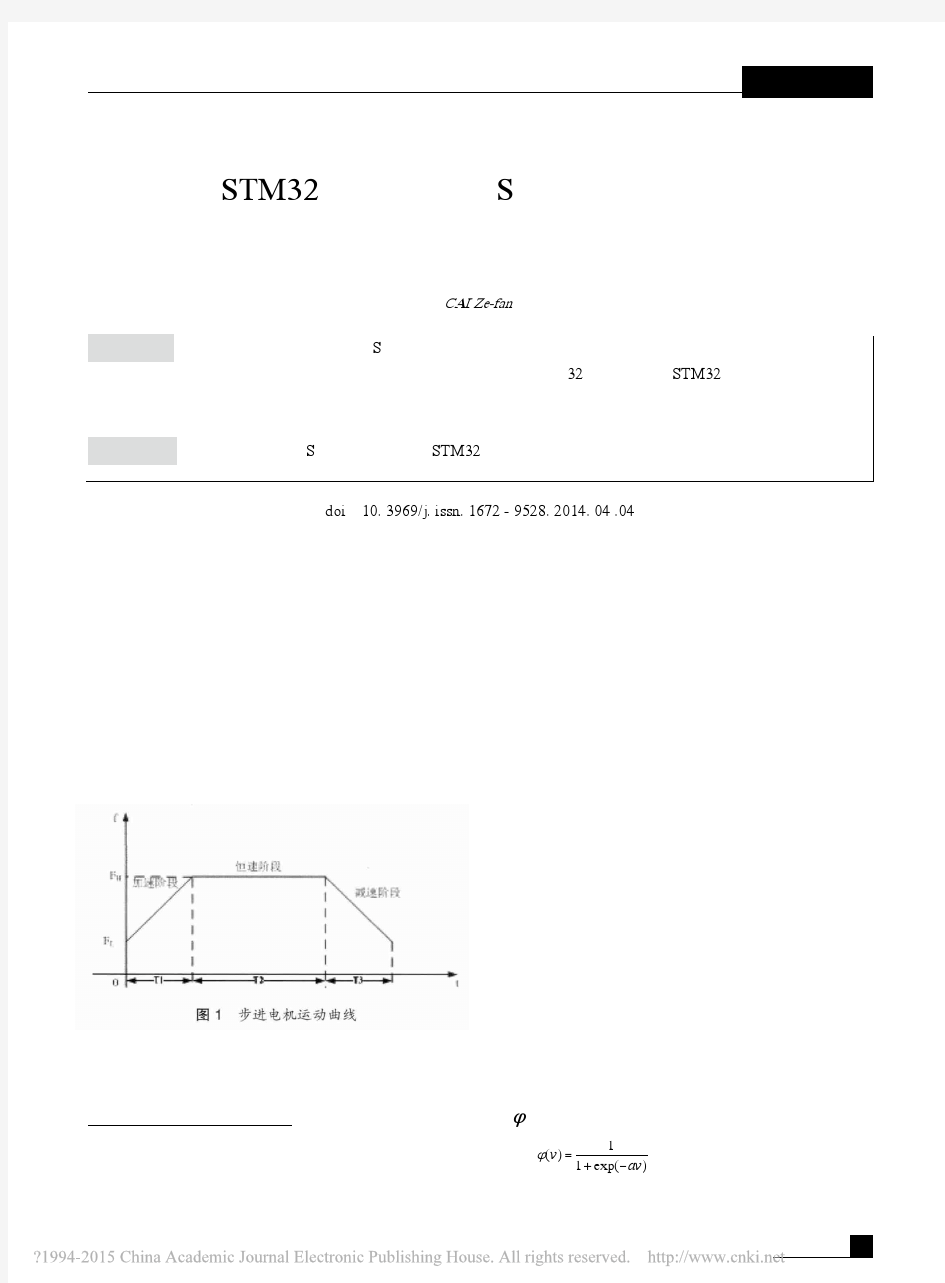
步进电机的速度控制 步进电机区别于其他控制用途电机的最大特点是,它可接受数字控制信号(电脉冲信号)并转化成与之相对应的角位移或直线位移,因而本身就是一个完成数字模拟转化的执行元件。而且它能进行开环位置控制,输入一个脉冲信号就得到一个规定的位置增量。这样的增量位置控制系统与传统的直流伺服系统相比,其成本明显降低,几乎不必进行系统调整。因此,步进电机广泛应用于数控机床、机器人、遥控、航天等领域,特别是微型计算机和微电子技术的发展,使步进电机获得更为广泛的应用。 步进电机的速度特性 步进电机的转速取决于脉冲频率、转子齿数和拍数。其角速度与脉冲频率成正比,而且在时间上与脉冲同步。因而在转子齿数和运行拍数一定的情况下,只要控制脉冲频率即可获得所需速度。由于步进电机是借助它的同步转矩而启动的,为了不发生失步,启动频率是不高的。特别是随着功率的增加,转子直径增大,惯量增大,启动频率和最高运行频率可能相差10倍之多。 为了充分发挥电机的快速性能,通常使电机在低于启动频率下启动,然后逐步增加脉冲频率直到所希望的速度,所选择的变化速率要保证电机不发生失步,并尽量缩短启动加速时间。为了保证电机的定位精度,在停止以前必须使电机从最高速度逐步减小脉冲率降到能够停止的速度(等于或稍大于启动速度)。因此,步进电机拖动负载高速移动一定距离并精确定位时,一般来说都应包括“启动-加速-高速运行(匀速)-减速-停止”五个阶段,速度特性通常为梯形,如果移动的距离很短则为三角形速度特性,如图1所示。 图1 步进电机的速度曲线 步进电机控制系统结构 PC机在适当的时刻通过对硬件控制电路上的8253计数器0赋初值,设置好加减速过程的频率变化(即速度、加速度变化),以防止失步。例如,在点位控制中设置好速度曲线图,在起动和升速时,使步进电机产生足够的转矩驱动负载,跟上规定的速度和加速度;在减速时,下降特性使负载不产生过冲,停止在规定的位置。硬件控制电路板上的8253产生脉冲方波作为中断信号源,启动细分驱动电路中的固化程序以产生一定频率的脉冲,经功率放大后驱动步进电机运动。步进电机运动方向的改变及启动和停止均由计算机控制硬件控制电路实现。 图2 步进电机控制系统 软件和硬件结合起来一起进行控制,具有电路简单、控制方便等优点。在这种控制中,微机软件占用的存储单元少,程序开发不受定时限制。只要外部中断允许,微机就能在电机的每一步之间自由地执行其他任务,以实现多台步进电机的运动控制。 定时器初值的确定 步进电机的实时控制运用PC机,脉冲方波的产生采用8253定时器,其计数器0工作于方式0以产生脉冲方波,计数器 1工作于方式1起记数作用,8253计数器0的钟频由2MHz晶振提供。设计算机赋给8253计数器0的初值为D1,则产生的脉冲方波频率为f1=f0/D1,周期为T1=1/f1=D1/f0,D1=f0T1=f0/f1。其中,f1为启动频率,f0为晶振频率。步进电机升降速数学模型为使步进电机在运行中不出现失步现象,一般要求其最高运行频率应小于(或等于)步进响应频率fs。在该频率下,步进电机可以任意启动、停止或反转而不发生失步现象。步进电机升降速有两种驱动方式,即三角形与梯形驱动方式(见图1),而三角形驱动方式是梯形驱动的特例,因而我们只要研究梯形方式。电机的加速和减速是通过计算机不断地修改定时器初值来实现的。在电机加速阶段,从启动瞬时开始,每产生一个脉冲,定时器初值减小某一定值,则相应的脉冲周期减小,即脉冲频率增加;在减速阶段,定时器初值不断增加,
文件编号:TP-AR-L2541 In Terms Of Organization Management, It Is Necessary To Form A Certain Guiding And Planning Executable Plan, So As To Help Decision-Makers To Carry Out Better Production And Management From Multiple Perspectives. (示范文本) 编订:_______________ 审核:_______________ 单位:_______________ 基于单片机步进电机速 度控制研究(正式版)
基于单片机步进电机速度控制研究 (正式版) 使用注意:该安全管理资料可用在组织/机构/单位管理上,形成一定的具有指导性,规划性的可执行计划,从而实现多角度地帮助决策人员进行更好的生产与管理。材料内容可根据实际情况作相应修改,请在使用时认真阅读。 本文对步进机一个全面的介绍,再基于单片机对 步进电机的控制。本文采用硬件控制系统,通过单片 机MC9S12XS128与光电编码器对步进电机进行速度的 控制。最后对步进电机的速度曲线进行研究。 步进电机又称为脉冲电动机或者阶跃电动 机,作为执行元件,是机电一体化的关键产品之一, 广泛应用于各种自动化控制系统之中,比如当今电子 钟表、工业机械手、包装机械和汽车制动元件的测试 中等。步进电机在未来应用前景会往更加小型化、从 圆形电动机往方形电动机和四相、五相往三相电动机
发展。而这便需要对步进电机的控制提出了更高的要求。 1.步进电机综合介绍 1.1.步进电机分类 步进电动机的种类很多,从广义上讲,步进电机的类型分为机械式、电磁式和组合式三大类型。按结构特点电磁式步进电机可分为反应式(VR)、永磁式(PM)和混合式(HB)三大类;按相数分则可分为单相、两相和多相三种。目前使用最为广泛的为反应式和混合式步进电机。 1.1.1.反应式步进电机 反应式步进电机的转子是由软磁材料制成的,转子中没有绕组。一般为三相,可实现大扭矩的输出,步进角一般为1.5度。它的结构简单,成本低,但噪音大。
步进电动机加减速曲线控制 步进电机因其无需反馈就能对位置和速度进行控制而在工业自动化设备中的应用极为广泛,对于速度变化较大的,尤其是加减速频繁的设备,常常发生力矩不足或者失步的现象,而实际上许多案例中步进电机的选型并没有问题,其问题在于负载位置对控制电路没有反馈,步进电机就必须正确响应每次励磁变化,如果励磁频率选择不当,电机不能够移到新的位置,那么实际的负载位置相对控制器所期待的位置出现永久误差,即发生失步现象或过冲现象。因此在速度变化较大的步进电机控制系统中,防止失步和过冲是开环控制系统能否正常运行的关键。 失步和过冲现象分别出现在步进电机启动和停止的时候。一般情况下,系统的极限启动频率比较低,而要求的运行速度往往比较高。如果系统以要求的运行速度直接启动,因为该速度已超过极限启动频率而不能正常启动,轻则可能发生丢步,重则根本不能启动,产生堵转。系统运行起来以后,如果达到终点时立即停止发送脉冲串,令其立即停止,则由于系统惯性作用,电机转子会转过平衡位置,如果负载的惯性很大,会使步进电机转子转到接近终点平衡位置的下一个平衡位置,并在该位置停下。 为了克服失步和过冲现象,应在步进电机启停时进行如图1所示的加减速控制。 从上图可以看出,L2段为恒速运行,L1 段为升频,L3段为降频,按照“失步”的定义,如果在 L1 及 L3 段上升及下降的控制频率变化大于步进电机的响应频率变化,步进电机就会失步,失步会导致步进电机停转,经常会影响系统的正常工作,因此,在步进电机变速运行中,必须进行正确的加减速控制。 以下按不同的控制单元,介绍几种常用的步进电机加减速控制方法。 1、运动控制卡作上位控制单元——以MPC01系列运动卡为例 MPC01系列运动控制卡可以作为PC机运动控制系统的核心控制单元。卡上的专用运动控制芯片可自动进行升降速计算。其运动控制函数库中也有专门进行梯形升降速运动参数设置的函数——set_profile(int ch, double ls, double hs, double accel)。其参数定义如下: ch: 设定的轴号。
表4钎杆改进前后的数据对比 总结点数总单元数 最大应力值(MPa )最小应力值(MPa )最大位移值(mm ) 原始模型3346105225027.150.112986改进模型 3654 10940 549 5.910.096754 4.3其他改进方面 除有限元分析的机械性能有改善之外,改进后的模型在轻量化、经济性上也有些许进步。 原始模型耗费材料的体积为(1.0644054×107)mm 3 ,质量为76.5kg ,改进后耗费材料体积为(1.0066225×107)mm 3 ,质量为72.757kg ,分别减 少5.43%和4.89%,此外,由于去除了上缸套、中缸套、下缸套,减少了合金钢原材料的使用并降低了加工成本,而增加体积较多的上缸体 所使用材料是经济性较好的球墨铸铁,可见,在制造成本上改进后的模型也取得了较好的效果。 5结论 在各项技术指标和基本工作原理不变的前提下,对液压破 碎锤零部件进行改进设计,并利用Pro/E 软件建立其机械本体和控制元件的三维模型,利用ANSYS 软件对液压破碎锤主要易损部件—冲击活塞、钎杆进行应力分析。通过对YC70液压破碎锤的建模和分析,改进后的模型在机械性能、经济性、轻量化等方面都取得了满意的结果,达到了改进的目的。 参考文献 [1]王雪,龚进,邹湘伏.液压冲击器的研究状况和发展趋势[J ].凿岩机械 气动工具,2006(3):19-23. [2]许同乐,夏明堂.液压破碎锤的发展与研究状况[J ].机械工程师,2005 (6):20-21.[3]范思源.液压破碎锤计算机仿真与实验研究[D ]:[硕士学位论文].上海:上海交通大学,2008. [4]杨国平.全液压独立无级调频调能液压冲击器的研究[D ]:[博士学位 论文].长沙:中南大学,2001. [5]谢良喜,陶平.液压破碎锤工作状态下活塞的力学模型与应力分析[J ].工程机械,2007(38):44-46. [6]博弈工作室.ANSYS9.0经典产品基础教程与实例详解[M ].北京:中国 水利水电出版社,2006.基于Proteus 的步进电机加减速控制辅助设计方法* 张利君张吉堂 (中北大学机械工程与自动化学院,太原030051 )Aided design methods for accelerating and decelerating control of step motor based on proteus ZHANG Li-jun ,ZHANG Ji-tang (School of Mechanical Engineering &Automatization ,North University of China ,Taiyuan 030051,China ) 文章编号:1001-3997(2011)05-0043-03 【摘要】研究利用Proteus 中的各种微控制器仿真模块实现步进电机加减速控制算法仿真,并且可以 在Proteus 中完成步进电机控制系统的硬件电路设计, 同时再结合软件程序设计进行仿真,最后通过Proteus 中的虚拟仪器记录分析仿真数据,从而实现了为设计步进电机加减速控制系统提供了一条快速、高效且低成本的设计途径。举例采用单片机AT89C52作为微控制器,通过高级仿真图表导出仿真数据,并利用Matlab 处理这些数据得到了预想的加减速曲线,证明方法在步进电机的加减速控制系统设计中可行性。 关键词:Proteus ;步进电机;加减速;仿真 【Abstract 】It studies the algorithm simulation for stepper motor accelerating and decelerating control by applying various micro-controller simulation module in Proteus software.It could complete the hardware cir -cuit design for control system of the step motor ,and simulate the design program with the software in Proteus . Thus ,the simulation data is recorded and analyzed through virtual instruments in Proteus so as to Provide a fast ,efficient and low-cost design approach for stepper motor accelerating and decelerating control system.For example ,it takes the single-chip computer AT89C52as the micro-controller which shall induct the simulation data through the advanced simulation chart , then the acceleration and deceleration curves expected shall be obtained after processing these data through the Matlab ,which shows us it is feasible to design the control system of the step motor in this method. Key words :Proteus ;Stepper motor ;Acceleration and deceleration ;Simulation 中图分类号:TH16 文献标识码:A *来稿日期:2010-07-04*基金项目:山西省科技攻关项目(20100321056-02) 1引言 步进电机是一种将电脉冲转换为机械角位移的机电执行元件,它的角位移量和输入脉冲的个数严格成正比,在时间上与输 入脉冲同步,非常适合于开环控制系统中,而且价格低廉,因此在工程中得到了广泛的应用。但不同的工程应用场合,其控制要求不同,需要的控制硬件和控制软件也不同,怎样快速地设计出符 ********************************************* Machinery Design &Manufacture 机械设计与制造 第5期 2011年5月 43
基于PLC的步进电机加减速运行设计 摘要:步进电机属于一种把电脉冲转换成为角位移形式的电子器件,其能够通过控制脉冲的个数来相应地控制角位移量,进而可以达到有效的准确定位目的,同时控制脉冲频率可以对电机转动的速度与加速度参数进行有效的控制,从而可以达到加减速的控制目的。 关键词:步进电机;PLC;加减速 1.引言 步进电机在数字控制系统当中属于一种执行功能的电动机,其可以有效地改变输入脉冲的个数从而相应地控制步进电动机转子机械位移参数的大小变化,通过改变输入脉冲相应的通电相序,可以有效地控制步进电动机转子机械位移变化量的方向,有利于达到方向位置的控制目的。目前阶段在世界范围内主要的PLC 厂家所生产制造的PLC都具有专门形式的步进电机控制指令,能够非常方便地与步进电机搭建成有效的运动控制系统。PLC需要与步进电机配合达到特定的运动控制目标,同时需要在PLC内部实行一系列的设置或者编写一定功能的控制程序[1]。 2.硬件的设计 2.1.PLC的选取 本文的设计研究中PLC需要与步进电机配合达到特定的运动控制目的,在PLC系统内部进行一定的设置并且编写一定功能的控制程序。由于步进电机的控制需要使用高速脉冲进行控制,因此PLC应当是可以输出高速脉冲的晶体管输出形式,然而不能够使用继电器输出形式的PLC对步进电机进行控制,因为这种设计对于PLC系统的要求并不会显得太高,输入/输出点所需要使用的并不多,控制程序量较少,因此选择西门子S7-200CPU226型号的PLC就能够满足具体的要求。西门子S7系列的PLC具有体积小、速度高与标准化等优点,具备网络通信能力,可靠性较高[2]。 2.2.步进电机的选取 在选取步进电动机时需要考虑的主要是步进电动机的型号,根据实际的系统要求,需要确定步进电动机相应的电压值、电流值与有无定位转矩以及使用螺栓机构的具体定位装置,进而就能够更好地确定步进电动机的相数与拍数,本文的设计所选取的步进电机是57BYG250C型号,其具体的数据参数如表1所示。 表1 57BYG250C型步进电机的数据参数 型号相数相电流步距角保持转矩空载启动频率
北华航天工业学院 课程设计报告(论文) 课程名称:微机控制技术课程设计 设计课题:步进电机的控制系统 专业班级: 学生姓名: 指导教师: 设计时间:2013年06月11日
北华航天工业学院电子工程系 微机控制技术课程设计任务书 姓名:专业:班级: 指导教师:职称:教授时间:2013.6.11 课程设计题目:步进电机的控制系统 设计步进电机单片机控制系统,其功能如下: 1.具有对步进电机的启停、正反转、加减速控制; 2.控制按钮分别为正转、反转、加速、减速、以及停止键; 3.能够通过三位LED数码管(或液晶显示器)显示当前的转动速度,并且由两只不同颜色的发光二极管分别指示正转和反转,因此可以清楚的显示当前转动方向和转速; 4.要求每组选择的步进电机控制字不同; 5.用单片机做控制微机; 应用软件:keil protues 成果验收形式: 1.课程设计的仿真结果 2.课程设计的报告书 参考文献: 【1】张家生. 电机原理与拖动基础【M】. 北京:北京邮电大学出版社,2006. 【2】马淑华,王凤文,张美金. 单片机原理与接口技术【M】.北京:北京邮电大学出版社,2007. 【3】顾德英,张健,马淑华.计算机控制技术【M】. 北京:北京邮电大学出版社,2006. 【4】张靖武,周灵彬. 单片机系统的PROTEUS设计与仿真【M】. 北京:电子工业出版社,2007 第16周 时间 安排 指导教师教研室主任: 2013年06 月11日
内容摘要 步进电机是一种进行精确步进运动的机电执行元件,它广泛应用于工业机械的数字控制,为使系统的可靠性、通用性、可维护性以及性价比最优,根据控制系统功能要求及步进电机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电机的开环控制系统。控制系统通过单片机存储器、I/O接口、中断、键盘、LED显示器的扩展、步进电机的环形分频器、驱动及保护电路、人机接口电路、中断系统及复位电路、单电压驱动电路等的设计,实现了四相步进电机的正反转,急停等功能。为实现单片机控制步进电机系统在数控机床上的应用,系统设计了两个外部中断,以实现步进电机在某段时间内的反复正反转功能,也即数控机床的刀架自动进给运动,随着单片机技术的不断发展,单片机在日用电子产品中的应用越来越广泛,自六十年代初期以来,步进电机的应用得到很大的提高。 关键词:步进电机单片机数码管显示
#include
unsigned char i; int j; while(1) { for(j=0;j<12;j++) //12个周期转一圈 { for (i=0; i<8; i++) //一个周期转30度 { if(flag==1) P2 = FFW[i]; //取数据 else P2 = FFZ[i]; delay(t); //t调节转速 } } } } void int0(void) interrupt 0 { EX0=0; delay(10); if(inc==0) { num++; P0=led7code[num%10]; if(num%10!=0&&flag){zhzhd=0;fazhd=1;} else if (num%10==0){zhzhd=0;fazhd=0;} else {zhzhd=1;fazhd=0;} switch(num%10) { case 0:t=0x00;break; case 1:t=0x12;break; case 2:t=0x11;break; case 3:t=0x10;break; case 4:t=0x09;break; case 5:t=0x08;break; case 6:t=0x07;break; case 7:t=0x06;break; case 8:t=0x05;break; case 9:t=0x04;break;
华北科技学院计算机系综合性实验 实验报告 课程名称微机原理及应用 实验学期 2011 至 2012 学年第二学期学生所在系部电子信息工程学院 年级 2009 专业班级 学生姓名学号 任课教师 实验成绩 计算机系制
《微机原理及应用》课程综合性实验报告 开课实验室:计算机接口实验室2012年5月29日 实验题目微机控制步进电机调速系统 一、实验目的 1、了解计算机控制步进电机原理 2、掌握步进电机正转反转设置方法 3、掌握步进电机调速工作原理及程序控制原理 二、设备与环境 TPC-2003A 微机。 Vc++编译器。 三、实验内容 硬件接线图参考实验指导书。 软件编程在TPC-2003A自带的VC++编译环境下使用。 在通用VC++下编程,需要拷贝相关的库文件。 用汇编语言编写控制程序需注明原理。 四、实验结果及分析 1、实验步骤 1、按如下实验原理图连接线路,利用8255输出脉冲序列,开关K0~K6控制步进电机转速,K7控制步进电机转向。8255 CS接288H~28FH。PC0~PC3接BA~BD;PA口接逻辑电平开关。 2、编程:当K0~K6中某一开关为“1”(向上拨)时步进电机启动。K7向上拨电机正转,向下拨电机反转。 实验原理图
2.实验结果 按照实验步骤连接实验电路,检查无误后运行程序。可以看到,当开关k0到k6依次为高电平时,电机转速越来越慢,k0闭合时速度最快,k6闭合时速度最慢,当k0到k6的低位有闭合时,步进电机按最低位的转速运行,因为程序中的查询方式是从k0-k6,即在程序的优先级别中k0的级别是最高的而k7的优先级别是最低的。k7控制电机的正转与反转。 3.实验分析 (1)步进电机的工作原理: 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 步进电机驱动原理是通过对每相线圈中的电流的顺序切换来使电机作步进式旋转。驱动 电路由脉冲信号来控制,所以调节脉冲信号的频率便可改变步进电机的转速。 如图(b)所示:本实验使用的步进电机用直流+5V 电压,每相电流为0.16A,电机线圈 由四相组成:即: φ1(BA) φ2(BB) Φ3(BC) Φ4(BD) 驱动方式为二相激磁方式,各线圈通电顺序如下表所示。图(b) 表中首先向φ1 线圈-φ2 线圈输入驱动电流,接着φ2-φ3,φ3-φ4,φ4-φ1,又返回到φ1-φ2,按这种顺序切换,电机轴按顺时针方向旋转。 实验可通过不同长度的延时来得到不同频率的步进电机输入脉冲,从而得到多种步进速度。
大连理工大学本科设计报告题目:步进电机转速控制系统设计 课程名称:单片机综合设计 学院(系):电子信息与电气工程学部 专业: 班级: 学号: 学生姓名: 成绩: 2013 年7 月20 日
题目:步进电机转速控制系统设计 1 设计要求 1)利用ZLG7290的键盘控制直流电机(或步进电机的转速、转向); 2)也可以利用ADC模块(与电位器配合),利用电位器控制转速; 3)利用ZLG7290的8位LED数码管显示电机转向、转速参数显示。 2 设计分析及系统方案设计 实验要求使用步进电机作为被控制对象,由ZLG7290做人机对话平台,利用单片机的P1(8位)和P3(部分口线)构造系统。实验最终实现功能、设计思路以及方案设计如以下几个小节所述。 2.1 系统设计实现功能 根据设计要求、现有设备以及知识储备,完成功能如下: ①由按键S1~S8实现转速切换,其中S1~S4正转,S5~S8反转 ②按键S16作为停止键,按下S10后步进电机停止转动,再按S1~S16步进电机按 照按键对应转速以及转向转动 ③按键S10作为复位键,当按下S10后,无论当前处于何种状态,系统恢复至初 始态 ④8为LED数码管显示当前步进电机转速(speed=0/1 1~4),转速前0表示正转, 1表示反转 ⑤若按下停止键,数码管显示当前转速;若按下复位键,数码管显示初始态speed=00 2.2 设计思路 本次的设计是LED显示与步进电机相结合以及若干功能键的组合的一种设计。根据之前学习的按键中断显示实验和定时器实验,使用INT0和INT1,INT0作为按键中断,INT1作为定时器。在主程序中实现LED初始显示、定时器计时初始、按键中断初始。INT0中断调用中断服务子程序实现对按键键值的判断,并根据相应的按键值实现对应步进电机的变化,并显示该按键对应的转速。INT1定时器中断根据INT0的按键键值,对定时器设定相应的初值,实现步进电机按规定的转速转动。对于按键停止,则是利用中断优先级,当INT0的中断优先级高时,系统进入中断,此时INT1停止计时,也就实现了步进电机的停止,当改变定时器与按键中断的优先级时,即把INT0设为低优先级,INT1设为高优先级,步进电机重新开始转动。此时添加一个对INT0位地址的查询,若有按键即正/反转的4档转速所对应的按键,步进电机开始重新转动。对于复位功能,则同样是利用按键键值的判断,在对应键值下控制电机初始化。
不需要专门的延迟。但是软件中应该做到使速度是连续的渐变,而不是突变。 类似物理里面我们分析的“上抛物体”的运动一样:先按匀减速运动,速度减到零后就变成反方向的匀加速运动了。 不要有从某个速度“突变”为静止,或由静止“突变”为某个速度的操作。这种“突变”自然会产生冲击振动。 至于这个“匀加速度”、“匀减速度”的加速度大小,则可以根据步进电机的性能和负载的惯性大小来确定。 通常,步进电机都会给出一个“最大力矩”的参数。根据这个最大力矩,和负载的惯性(包括步进电机的转子和传动机构的惯性在内)大小,可以计算出加速度不应该超过多少。实际设计时,还应该比最大允许值再留出相当的余地。 当然,我上面说的“速度”、“加速度”都是一个连续的理论值,实际的步进电机是一步一步离散的操作的,和理论规律总会有差别。但是只要这种“量化误差”不超过一定限度,就可以有满意的效果了。 最理想的是,这个误差的累计值不超过0.5步。也就是说,假如按照上述“匀加速”、“匀减速”的理论计算,在时刻t的时候应该走到x步(有小数)的位置,而真实的执行效果是:走到的位置总是等于x的四舍五入取整的值。这是最理想的。 如果算法设计不好,这个累积误差可能会大些。但最坏的情况下,这个误差的累计值不要超过半个相位周期。例如,您的脉冲分配如果是“四相八拍制”,那么,累积误差就必须小于4步。 超出的话,就会发生步进电机的“失步”。 上面说的道理,对于采用不采用“细分”,道理是一样的。只是采用细分后的每一个“步”(“细步”)比原来小了,容易做到比较均匀。 例如上面说的“四相八拍制累积误差就必须小于4步”,如果采用了“16细分”,那么只要小于64“细步”就可以,显然软件里处理起来更容易一些。 但是,只要软件考虑设计仔细一些,不采用细分也是可以做到的。 【看了“广州一丁”兄的回答后,再补充说明一点】 上面“广州一丁”兄说的“减速时间长点,加速时间同时也长点”,就相当于我这里说的“匀加速运动”和“匀减速运动”段中,加速度的绝对值再小一些。 原则上说,这个加速度的绝对值,只要不超过上面说的根据电机性能和负载惯性算出来的允许值就可以。当然,更小一点冲击更小。 我只是担心,您是否没有按“匀加速”、“匀减速”设计,而是直接由静止突变为某个速度,或由某个速度突变为静止。如果是那样,问题就比较大了。 一般来说,一个方向的运动,应该分为至少两个阶段,或者还需要三个阶段。开始是由静止开始的匀加速度段,后段是匀减速段(直到速度减为零)。如此,中间的速度最高。假如最高的速度超出了电机或者我们的设备允许的值,那么还应该限制。于是,中间又多出一个段:匀速段。这就成了三个段。 这种控制原理上应该是清楚的。但是实现时的算法,则根据需求不同,有可能需要特别安排。
步进电机只能够由数字信号控制运行的,当脉冲提供给驱动器时,在过于短的时间里,控制系统发出的脉冲数太多,也就是脉冲频率过高,将导致步进电机堵转。要解决这个问题,必须采用加减速的办法。就是说,在步进电机起步时,要给逐渐升高的脉冲频率,减速时的脉冲频率需要逐渐减低。这就是我们常说的“加减速”方法。 步进电机转速度是根据输入的脉冲信号的变化来改变的,从理论上讲,给驱动器一个脉冲,步进电机就旋转一个步距角(细分时为一个细分步距角)。实际上,如果脉冲信号变化太快,步进电机由于内部的反向电动势的阻尼作用,转子与定子之间的磁反应将跟随不上电信号的变化,将导致堵转和丢步。 所以步进电机在高速启动时,需要采用脉冲频率升速的方法,在停止时也要有降速过程,以保证实现步进电机精密定位控制。加速和减速的原理是一样的。以加速实例加以说明:加速过程是由基础频率(低于步进电机的直接起动最高频率)与跳变频率(逐渐加快的频率)组成加速曲线(降速过程反之)。跳变频率是指步进电机在基础频率上逐渐提高的频率,此频率不能太大,否则会产生堵转和丢步。 步电机系统解决方案
加减速曲线一般为指数曲线或经过修调的指数曲线,当然也可采用直线或正弦曲线等。使用单片机或者PLC,都能够实现加减速控制。对于不同负载、不同转速,需要选择合适的基础频率与跳变频率,才能够达到最佳控制效果。指数曲线,在软件编程中,先算好时间常数存贮在计算机存贮器内,工作时指向选取。通常,完成步进电机的加减速时间为300ms以上。如果使用过于短的加减速时间,对绝大多数步进电机来说,就会难以实现步进电机的高速旋转。 深圳市维科特机电有限公司成立于2005年,是步进电机产品的销售、系统集成和应用方案提供商。我们和全球产品性价比高的生产厂家合作,结合本公司专家团队多年的客户服务经验,给客户提供有市场竞争力的步进电机系统解决方案。我们的主要产品有信浓(SHINANO KENSHI)混合式步进电机、日本脉冲(NPM)永磁式步进电机、减速步进电机、带刹车步进电机、直线步进电机、空心轴步进电机、防水步进电机以及步进驱动器、减振垫、制振环、电机引线、拖链线、齿轮、同步轮、手轮等专业配套产品。我们还供应德国TRINAMIC驱动芯片和日本NPM运动控制芯片。根据客户配套需要,我们还可以 步电机系统解决方案
基于51系列单片机控制步进电机调速实验 实验指导书 仇国庆编写 重庆邮电大学自动化学院 自动化专业实验中心 2009年2月
基于51系列单片机控制步进电机调速实验 实验目的及要求: 1、熟悉步进电机的工作原理 2、熟悉51系列单片机的工作原理及调试方法 3、设计基于51系列单片机控制的步进电机调速原理图(要求实现电机的速度反馈测量,测量方式:数字测量) 4、实现51系列单片机对步进电机的速度控制(步进电机由实验中心提供,具体型号42BYG )由按钮控制步进电机的启动与停止;实现加速、匀速、和减速控制。速度设定由键盘设定,步进电机的反馈速度由LED 数码管显示。 实验原理: 步进电机控制原理 一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。由于输入的是脉冲信号,输出的角位移是断续的,所 以又称为脉冲电动机。随着数字控制系统的发展,步进电动机的应用将 逐渐扩大。 步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来 进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由 脉冲信号频率决定。步进电机的驱动电路根据控制信号工作,控制信号 可以由单片机产生。 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几 何轴线依次分别与转子齿轴线错开。0、1/3て、2/3て,(相邻 两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐, B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:(图2所示)
步进电机的速度控制 步进电机是一种能将脉冲信号转换成角位移或线位移的执行器件,广泛应用于各种工业设备中。步进电机的角位移或线位移与控制脉冲数成正比。通过改变脉冲频率就可以调节电机的转速,实现电机的加减速,转向等。 在实际步进电机应用中,尤其在要求快速响应的控制系统中,其关键问题是如何保证步进电机在运行过程中不发生失步。 调速电动机控制系统按其功能分为以下几个部分:中央处理器首选8051系列单片机;测速电路;A/D转换电路;供电电路;过零脉冲的形成电路;可控硅的触发电路;通信串行接口电路;显示接口电路以及时钟复位电路。 步进脉冲的调频方法 1、软件延时:通过调用标准的延时子程序来实现。优点是程序简单,不占硬件资源,缺点是浪费CPU的宝贵时间,在控制过程中,CPU不能做其他的事。 2、硬件定时:假设控制器为AT89S52单片机,晶振频率为12MHZ,将T0作为定时器使用,设定T0工作在模式1(16为定时/计数器)。只需要改变T0的定时常数,就可以实现步进电机的调速。 步进电机的速度控制规律: 1、按梯形规律升降,即步进电机的转速每跃进一个台阶后,恒速行驶一段时间。这种方法的缺点是在恒速阶段没有加速,为充分利用步进电机的加速性能,而且高频阶段加速台阶高,步进电机在速度阶跃时会发生失步。 2、按直线规律升降速方式,由于这种升速方法的及速度是恒定的,其缺点是未充分考虑步进电机输出力矩随速度变化的特性,步进电机高速时会发生失步。 3、第三种是按指数规律升降速,在以微处理器为核心的驱动器中,常用定时常数递减(递加)的方法实现升降速,升速曲线成上凹形,低频时升速太慢,高速时升速太快。 (注:素材和资料部分来自网络,供参考。请预览后才下载,期待你的好评与关注!)
步进电机加减速程序 2009-7-24 14:52 提问者:568826036|浏览次数:1251次 要求C语言写的程序 2009-7-29 14:43 最佳答案 main.c文件内容: #include"stm32f10x_lib.h" #include"main.h" TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; GPIO_InitTypeDef GPIO_InitStructure; ErrorStatus HSEStartUpStatus; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; int pulse; int StepCount; int pulse1; int pulse2; int t1; int t2; int r1; int r2; void RCC_Configuration(void); void NVIC_Configuration(void); void GPIO_Configuration(void); void TIM2_Configuration(void); void f(int Vt,int a,int d,int S); #define VECT_TAB_RAM int main(void) { #ifdef DEBUG debug();/*[初始化外围设备指针]*/ #endif RCC_Configuration(); //初始化时钟与复位 NVIC_Configuration();//初始化中断嵌套 TIM2_Configuration();//初始化定时器 GPIO_Configuration(); GPIO_WriteBit(GPIOD, GPIO_Pin_7, (BitAction)(0));
1 引言 在工业控制系统里步进电动机是主要的控制元件之一。步进电机具有快速启动停止,精确定位和能够使用数字信号进行控制,能够实现脉冲-角度转换的特点,因此得到广泛的应用。在使用步进电机的控制系统里,脉冲分配器产生周期的控制脉冲序列,步进电机驱动器每接收一个脉冲就控制步进电机沿给定方向步进一步。 本实验旨在通过控制AT89S52芯片,实现对四相步进电机的转动控制。具体功能主要是控制电机正转、反转、加速与减速。 具体工作过程是:给试验箱上电后,拨动启动开关,步进电机按照预先设置的转速和转动方式转动。调整正反转按钮,步进电机实现正反转切换;拨动加速开关,步进电机转速加快,速度达到最大值,不再加速;拨动减速开关时,电机减速转动,速度减到最小速度,停止减速。 2 四相步进机 2.I 步进电机 步进电机是一种将电脉冲转化为角位移的执行机构。电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。 2.2 步进电机的控制
1.换相顺序控制:通电换相这一过程称为脉冲分配。例如:混合式步进电机 的工作方式,其各相通电顺序为A-B-C-D,通电控制脉冲必须严格按照这一顺序分别控制A,B,C,D相的通断。 2.控制步进电机的转向控制:如果给定工作方式正序换相通电,步进电机正 转,如果按反序通电换相,则电机就反转。 3.控制步进电机的速度控制:如果给步进电机发一个控制脉冲,它就转一步, 再发一个脉冲,它会再转一步。两个脉冲的间隔越短,步进电机就转得越快。 2.3 步进电机的工作过程 图2.1步进电机设计图 开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。 而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。 依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。 四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。 八拍工作方式的电源通电时序与波形如图所示:
1 加减速控制算法 1.1 加减速曲线 本设计按照步进电机的动力学方程和矩频特性曲线推导出按指数曲线变化的升降速脉冲序列的分布规律,因为矩频特性是描述每一频率下的最大输出转矩,即在该频率下作为负载加给步进电机的最大转矩。因此把矩频特性作为加速范围下可以达到(但不能超过)的最大输出转矩来拟订升降速脉冲序列的分布规律,就接近于最大转矩控制的最佳升降速规律。这样能够使得频率增高时,保证输出最大的力矩,即能够对最大的力矩进行跟随,能充分的发挥步进电机的工作性能,使系统具有良好的动态特性。 由步进电机的动力学方程和矩频特性曲线,在忽略阻尼转矩的情况下,可推导出如下方程: 式中,为转子转动惯量,K为假定输出转矩按直线变化时的斜率,τ为决定升速快慢的时间常数,在实际工作中由实验来确定。fm为负载转矩下步进电机的最高连续运行频率,步进电机必须在低于该频率下运行才能保证不失步。(1)式为步进电机的升速特性,由此方程可绘制出电机升速曲线。(1)式表明驱动脉冲的频率f应随时间t作指数规律上升,这样就可以在较短的时间内使步进电机的转速上升至要求的运行速度。鉴于大多数的步进电机的矩频特性都近似线性递减的,所以上述的控制规律为最佳。 1.2 加减速离散处理 在本系统中,FPGA使用分频器的方式来控制步进电机的速度,升降速控制实际上是不断改变分频器初载值的大小。指数曲线由于无法通过程序编制来实现,可以用阶梯曲线来逼近升速曲线,不一定每步都计算装载值。 如图l所示,纵坐标为频率,单位是步/秒,其实反映了转速的高低。横坐标为时间,各段时间内走过的步数用N来表示,步数其实反映了行程。图中标出理想升速曲线和实际升速曲线。
用PLC实现步进电机的快速精确定位 步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号时就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),其旋转以固定的角度运行。可以通过控制脉冲个数来控制角位移量以达到准确定位的目的;同时也可以通过控制脉冲频率来控制电机转动的速度和加速度而达到调速的目的。步进电机作为一种控制用的特种电机,因其没有积累误差(精度为100%)而广泛应用于各种开环控制。 1 定位原理及方案 1.1 步进电机加减速控制原理 步进电机驱动执行机构从一个位置向另一个位置移动时,要经历升速、恒速和减速过程。当步进电机的运行频率低于其本身起动频率时,可以用运行频率直接起动并以此频率运行,需要停止时,可从运行频率直接降到零速。当步进电机运行频率fb>fa(有载起动时的起动频率)时,若直接用fb频率起动会造成步进电机失步甚至堵转。同样在fb频率下突然停止时,由于惯性作用,步进电机会发生过冲,影响定位精度。如果非常缓慢的升降速,步进电机虽然不会产生失步和过冲现象,但影响了执行机构的工作效率。所以对步进电机加减速要保证在不失步和过冲前提下,用最快的速度(或最短的时间)移动到指定位置。 步进电机常用的升降频控制方法有2种:直线升降频(图1)和指数曲线升降频(图2)。指数曲线法具有较强的跟踪能力,但当速度变化较大时平衡性差。直线法平稳性好,适用于速度变化较大的快速定位方式。以恒定的加速度升降,规律简练,用软件实现比较简单,本文即采用此方法。 1.2 定位方案 要保证系统的定位精度,脉冲当量即步进电机转一个步距角所移动的距离不能太大,而
且步进电机的升降速要缓慢,以防止产生失步或过冲现象。但这两个因素合在一起带来了一个突出问题:定位时间太长,影响执行机构的工作效率。因此要获得高的定位速度,同时又要保证定位精度,可以把整个定位过程划分为两个阶段:粗定位阶段和精定位阶段。粗定位阶段,采用较大的脉冲当量,如0.1mm/步或1mm/步,甚至更高。精定位阶段,为了保证定位精度,换用较小的脉冲当量,如0.01mm/步。虽然脉冲当量变小,但由于精定位行程很短(可定为全行程的五十分之一左右),并不会影响到定位速度。为了实现此目的,机械方面可通过采用不同变速机构实现。 工业机床控制在工业自动化控制中占有重要位置,定位钻孔是常用工步。设刀具或工作台欲从A点移至C点,已知AC=200mm,把AC划分为AB与BC两段,AB=196mm,BC=4mm,AB 段为粗定位行程,采用0.1mm/步的脉冲当量依据直线升降频规律快速移动,BC段为精定位行程,采用0.01mm/步的脉冲当量,以B点的低频恒速运动完成精确定位。在粗定位结束进入精定位的同时,PLC自动实现变速机构的更换。 2 定位程序设计 2.1 PLC脉冲输出指令 目前较为先进的PLC不仅具有满足顺序控制要求的基本逻辑指令,而且还提供了丰富的功能指令。Siemens S7-200系列PLC的PLUS指令在Q0.0和Q0.1输出PTO或PWM高速脉冲,最大输出频率为20KHz。脉冲串(PTO)提供方波输出(50%占空比),用户控制周期和脉冲数。脉冲宽度可调制(PWM)酮能提供连续、变占空比输出,用户控制周期和脉冲宽度。本文采用PTO的多段管线工作方式实现粗定位,PTO的单段管线方式实现精定位,如图3。 图3 步进电机定位过程图 上述例子中,假定电机的起动和结束频率是2KHz,最大脉冲频率是10KHz。在粗定位过程中,用200个脉冲完成升频加速,400个脉冲完成降频减速。使用PLC的PTO多段管线脉